车身电子稳定系统:
一、博世公司ESP 车身电子稳定系统
ESP和博世公司
车身电子稳定系统(Electronic Stability Program,简称ESP),是博世(Bos ch)公司的专利[1]。10年前,博世是第一家把电子稳定程序(ESP)投入量产的公司。因为ESP是博世公司的专利产品,所以只有博世公司的车身电子稳定系统才可称之为ESP。在博世公司之后,也有很多公司研发出了类似的系统,如日产研发的车辆行驶动力学调整系统(Vehicle Dynamic Control 简称VDC)[2],丰田研发的车辆稳定控制系统(Vehicle Stability Control 简称VSC)[3],本田研发的车辆稳定性控制系统(Vehicle Stability Assist Control 简称VSA)[4],宝马研发的动态稳定控制系统(Dynamic Stability Control 简称DSC)[5]等等。
ESP概述
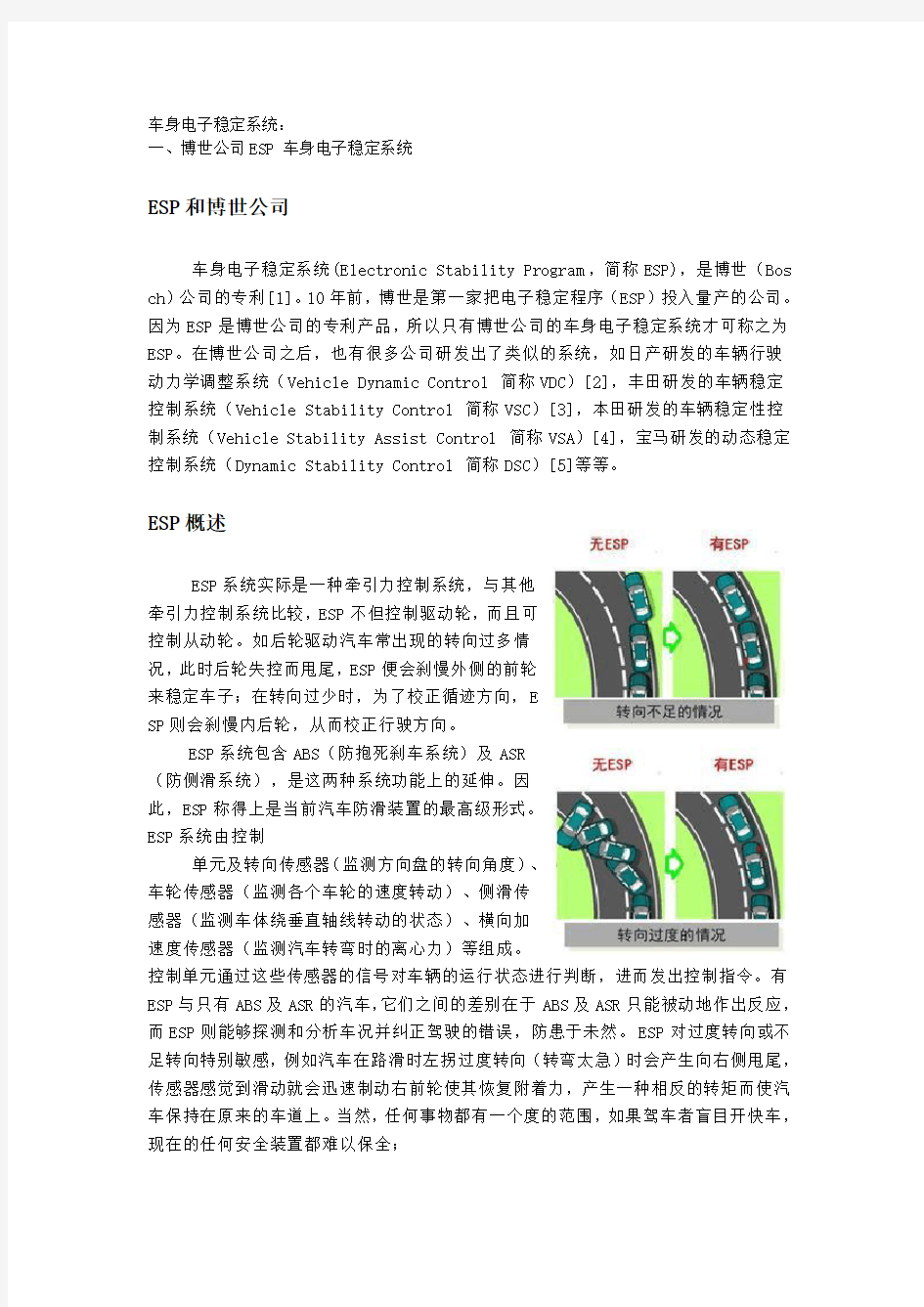
ESP系统实际是一种牵引力控制系统,与其他
牵引力控制系统比较,ESP不但控制驱动轮,而且可
控制从动轮。如后轮驱动汽车常出现的转向过多情
况,此时后轮失控而甩尾,ESP便会刹慢外侧的前轮
来稳定车子;在转向过少时,为了校正循迹方向,E
SP则会刹慢内后轮,从而校正行驶方向。
ESP系统包含ABS(防抱死刹车系统)及ASR
(防侧滑系统),是这两种系统功能上的延伸。因
此,ESP称得上是当前汽车防滑装置的最高级形式。
ESP系统由控制
单元及转向传感器(监测方向盘的转向角度)、
车轮传感器(监测各个车轮的速度转动)、侧滑传
感器(监测车体绕垂直轴线转动的状态)、横向加
速度传感器(监测汽车转弯时的离心力)等组成。
控制单元通过这些传感器的信号对车辆的运行状态进行判断,进而发出控制指令。有ESP与只有ABS及ASR的汽车,它们之间的差别在于ABS及ASR只能被动地作出反应,而ESP则能够探测和分析车况并纠正驾驶的错误,防患于未然。ESP对过度转向或不足转向特别敏感,例如汽车在路滑时左拐过度转向(转弯太急)时会产生向右侧甩尾,传感器感觉到滑动就会迅速制动右前轮使其恢复附着力,产生一种相反的转矩而使汽车保持在原来的车道上。当然,任何事物都有一个度的范围,如果驾车者盲目开快车,现在的任何安全装置都难以保全;
ESP的组成部分
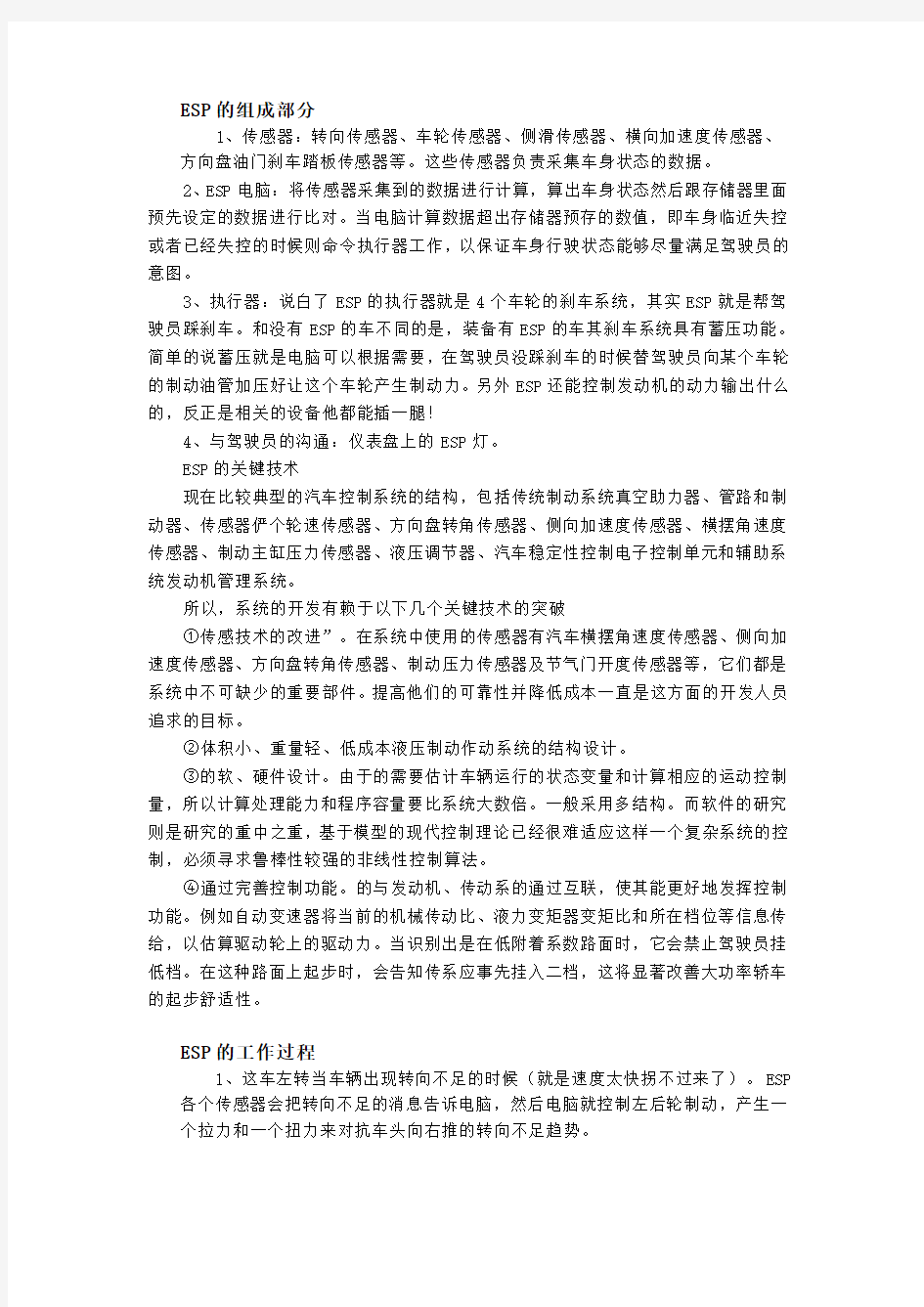
1、传感器:转向传感器、车轮传感器、侧滑传感器、横向加速度传感器、
方向盘油门刹车踏板传感器等。这些传感器负责采集车身状态的数据。
2、ESP电脑:将传感器采集到的数据进行计算,算出车身状态然后跟存储器里面预先设定的数据进行比对。当电脑计算数据超出存储器预存的数值,即车身临近失控或者已经失控的时候则命令执行器工作,以保证车身行驶状态能够尽量满足驾驶员的意图。
3、执行器:说白了ESP的执行器就是4个车轮的刹车系统,其实ESP就是帮驾驶员踩刹车。和没有ESP的车不同的是,装备有ESP的车其刹车系统具有蓄压功能。简单的说蓄压就是电脑可以根据需要,在驾驶员没踩刹车的时候替驾驶员向某个车轮的制动油管加压好让这个车轮产生制动力。另外ESP还能控制发动机的动力输出什么的,反正是相关的设备他都能插一腿!
4、与驾驶员的沟通:仪表盘上的ESP灯。
ESP的关键技术
现在比较典型的汽车控制系统的结构,包括传统制动系统真空助力器、管路和制动器、传感器俨个轮速传感器、方向盘转角传感器、侧向加速度传感器、横摆角速度传感器、制动主缸压力传感器、液压调节器、汽车稳定性控制电子控制单元和辅助系统发动机管理系统。
所以,系统的开发有赖于以下几个关键技术的突破
①传感技术的改进”。在系统中使用的传感器有汽车横摆角速度传感器、侧向加速度传感器、方向盘转角传感器、制动压力传感器及节气门开度传感器等,它们都是系统中不可缺少的重要部件。提高他们的可靠性并降低成本一直是这方面的开发人员追求的目标。
②体积小、重量轻、低成本液压制动作动系统的结构设计。
③的软、硬件设计。由于的需要估计车辆运行的状态变量和计算相应的运动控制量,所以计算处理能力和程序容量要比系统大数倍。一般采用多结构。而软件的研究则是研究的重中之重,基于模型的现代控制理论已经很难适应这样一个复杂系统的控制,必须寻求鲁棒性较强的非线性控制算法。
④通过完善控制功能。的与发动机、传动系的通过互联,使其能更好地发挥控制功能。例如自动变速器将当前的机械传动比、液力变矩器变矩比和所在档位等信息传给,以估算驱动轮上的驱动力。当识别出是在低附着系数路面时,它会禁止驾驶员挂低档。在这种路面上起步时,会告知传系应事先挂入二档,这将显著改善大功率轿车的起步舒适性。
ESP的工作过程
1、这车左转当车辆出现转向不足的时候(就是速度太快拐不过来了)。ESP
各个传感器会把转向不足的消息告诉电脑,然后电脑就控制左后轮制动,产生一个拉力和一个扭力来对抗车头向右推的转向不足趋势。
2、还是左转,后轮抓地不足或者后驱车油门踩猛了出现转向过度的时候(就是甩屁股)。ESP会控制右前轮制动,同时减小发动机输出的功率。纠正错误的转向姿态。
3、直线刹车由于地面附着力不均匀出现跑偏的时候(这事有ABS的车也会出现,我下雪的时候老在雪地上这么玩,这时候车身会向抓地强的一边跑偏)。ESP会控制附着力强的轮子减小制动力,让车按照驾驶员预想的行驶线路前进。同样当一边刹车一边转向的时候ESP也会控制某些车轮增大制动力或者减小制动力让车子按照驾驶员的意图行进。
ESP最重要的特点
就是它的主动性,如果说ABS是被动地作出反应,那么ESP却可以做到防患于未然。
Nissan VDC車輛動態控制 (Vehicle Dynamics Contral)
道路在雨後會因為路面的不平整或是排水系統不良,而在路面出現一灘灘的積水。為了到山林之中吸收大量的芬多精,而必需通過蜿蜒的山路。以上的路況都有機會使車輛發生難以控制的狀況。為了讓駕駛者能夠在難以控制車輛的慌亂情況之下把車輛安全的帶離危險地帶,以及將處於失控邊緣的車輛給安全的帶回到正常的行駛路線,或是預防車輛在極度操控時達到失控狀況,因此能夠主動控制車輛動態表現的「VDC車輛動態控制系統」於是因應而生。
為了讓VDC車輛動態控制系統能夠主動控制車輛的動態表現,因此VDC車輛動態控制系統就必須結合ABS防鎖死煞車系統、TCS循跡控制系統、BLSD煞車式防滑差速器等系統的功能,以控制四個車輪的轉動速度來改變車輛在行駛中的姿態,並且使車輛在道路上以更佳的路線去行駛。藉由VDC的控制讓以非直線狀態行駛的車輛能夠有最佳的行駛路線,這樣就能夠提升車輛在行駛中的穩定性,尤其是當車輛在濕滑路面或是在過彎時,因而在提升車輛穩定性的同時也大大的增加了車輛在行駛當中的安全性。
Nissan汽車是全球汽車製造廠中少數具有能力開發車身穩定系統的廠商,Nissan汽車的VDC車輛動態控制系統更是其中的翹楚。Nissan的VDC最早是配置在1998年的Cima車型(日規Infiniti Q45),之後陸續配置在Nissan與Infiniti品牌的車型之上,現今的Infiniti Q45、M45、G35、FX35等車型,更是將VDC列為標準配備。
當車輛在過彎時發生了轉向不足或是轉向過度的情況時,VDC系統會適時的利用ABS、TCS、BLSD的功能以介入控制車輛在行駛中的車身姿態。一輛行駛中的汽車,其車上的「VDC統合控制電腦」會隨時的接受「G值感知器」、「方向盤角度感知器」、「車輪速度感知器」等等感知器的訊號,當「VDC統合控制電腦」判定出車輛正處於轉向不足或是轉向過度的不穩定狀態時,VDC系統會利用ABS系統去控制煞車系統進行煞車的動作,透過BLSD系統的控制去針對單一個或是多個車輪進行煞車的動作,再輔以TCS適當的降低引擎的扭力輸出,來調整汽車於變換車道或在過彎時的車身姿態,使汽車在變換車道或是過彎時能夠更加的平穩而安全。
車輪與驅動及轉向的關係
駕駛者在扭轉方向盤之後車輪就隨著這個動作而產生轉動,並且使車輛在道路上轉彎。為什麼車輛會轉彎呢?車輪又是如何的轉動呢?。
汽車的驅動方式分別有前輪驅動、後輪驅動、四輪驅動這三種模式。
前輪驅動:前輪要同時擔負驅動及轉向的工作。
後輪驅動:前輪負責轉向,後輪負責驅動。
四輪驅動:前輪要同時擔負驅動及轉向的工作,後輪也要負擔部份的驅動工作。
驅動輪與抓地力的關係
前輪驅動與後輪驅動的全部動力是經由二個驅動輪將引擎的扭力轉換成牽引力之後,並且將牽引力傳遞到地面使得車輛能夠前進。這種動力傳遞的方式使動力輸出強大的車輛在以大扭力進行起步及過彎時,容易使驅動輪與地面發生打滑,而影響到車輛的性能表現。
在前輪驅動車型的前車輪上面除了有牽引力之外,還有轉向的阻力;而在後輪驅動車型的後車輪上面則是有牽引力以及外滑的阻力;驅動輪的輪胎在受到這些力量的影響之後,一旦受力的總合大於輪胎與地面之間的摩擦力時,就會發生抓地力不足並使車
輪產生滑移的情況,在這樣的情況下輕者僅是使車輛輕微的滑移或是轉向不足,嚴重者會使車輛衝出路面或是在車道上面旋轉。此一情形在多種的控制系統被研發出來之後已經逐漸的被改善了;尤其是在安裝VDC車輛動態控制系統之後,讓汽車在不減損動力性能的表現之下,又能夠保持車輛在行駛當中的安全性以及舒適性。
四輪驅動的全部動力是被分散到四個驅動輪上面,在每一個驅動輪都僅需要負擔少許的扭力的情形下,輪胎就不會因為引擎強大的動力輸出而發生打滑的情況,使得四輪驅動的車輛在轉向時會呈現出較為中性化的轉向特性。但是四輪驅動的車輛在轉向過度或是不足的情況發生時,就必須要進行較為複雜的操控動作,才能夠將車身的動態給修正到安全的範圍。此一情形在研發出多種的控制系統之後已經被改善了許多;尤其是在安裝VDC車輛動態控制系統之後,在車輛瀕臨失控的邊緣時,讓駕駛者不須要再進行複雜的操控動作,就能夠安全的駕駛車輛,並且很舒服的往目的地前進。VDC的夥伴- ABS防鎖死煞車系統
當汽車在道路上做緊急煞車的時候,或是在濕滑路面上進行煞車時,如果有一個車輪發生打滑的情形,輕者會使車身發生晃動,重者則會使車身發生轉動與滑移。如果二個前輪同時發生鎖死的情形,則汽車將無法變換前進的方向,導致汽車循著原來前進的方向直衝過去,並使汽車衝出彎道或是撞上前方的車輛,而發生令人難以想像的危險。
ABS利用油壓泵的做用使煞車油管內的油壓能夠快速的降低,並且又迅速的讓油壓回復到原來的程度;這種有如快速的重複踩踏煞車的動作,使車輪不至於發生被鎖死的情形。ABS讓汽車在車輪可能發生鎖死的緊急狀況下,還能夠順利的改變前進方向以避免發生危險。目前幾乎所有的車型都有裝備ABS,而且ABS在汽車上經過多年的應用及改進之後,現在的ABS已經進入到四輪均可獨立控制的四迴路型ABS系統。VDC的夥伴- TCS循跡控制系統
當汽車以大扭力做快速起步的動作時,驅動輪會因為車輪的牽引力過大,而導致輪胎與地面之間發生打滑,並且使輪胎發出尖銳叫聲;這種經常在電視畫面出現的情況相信大家並不陌生。然而汽車在加速與減速的過程中以及過彎的時,偶爾也會發生車輪打滑的現象,這種情形尤其會發生在激烈操控車輛的情況下。當驅動輪發生打滑時,會使車輪產生不平順的行駛軌跡;情況輕者讓車身產生晃動,而重者會讓車身產生旋轉。
TCS可以在偵測到驅動輪發生打滑現象時,TCS會立即控制ABS對打滑的車輪進行煞車的動作,同時也會透過ECM的控制使引擎降低輸出動力,以降低驅動輪的牽引力,並且防止驅動輪發生打滑的情況。
VDC的夥伴- BLSD煞車式防滑差速器
車輛行經低摩擦路面時,BLSD系統會對因為打滑而轉速過快的車輪進行煞車,讓行駛中的車輛不至於發生搖擺的現象,而能夠在低摩擦路面上平穩的做直線行駛,或是以順暢的弧形路線通過彎道。
當左、右驅動輪的其中之一陷入沙地等低摩擦力的路面時,位於低摩擦力路面的那一個車輪就會獲得較多的動力,而使車輛的行駛產生困難。萬一車輪是陷落到水溝時,
則陷落到水溝的車輪就會獲得全部的動力,而使車輛停在原地動彈不得。BLSD系統能夠利用ABS煞車的作用降低位於低摩擦力路面或是水溝的車輪所獲得的動力,而讓停留在正常路面上的車輪獲得較多的動力,於是汽車的行駛就不再發生困難,或是讓受困的車輛得以脫離困境。
VDC對車身動態的修正-轉向過度
當車輛在過彎時發生了轉向過度的情況,VDC系統會依照「G值感知器」、「方向盤角度感知器」、「車輪速度感知器」等等感知器傳來的訊號做計算,然後利用BLSD 控制ABS對於彎外側的前車輪與後車輪進行煞車的動作。前車輪與後車輪的轉速被降低了以後,車身前後方向的軸線會逐漸往彎外側旋轉,同時也將重心的位置往彎外側移動。於是汽車的行進路線便會往彎外側滑移,使車輛的行進路線從轉向過度轉變成轉向中性,讓汽車得以平穩且安全的通過彎道。
VDC對車身動態的修正-轉向不足
當車輛在過彎時發生轉向不足的傾向時,VDC系統會依照「G值感知器」、「方向盤角度感知器」、「車輪速度感知器」等等感知器傳來的訊號做計算,然後利用BLSD 控制ABS對彎內側的後車輪進行煞車的動作,以降低彎內側後車輪的轉速,車身前後方向的軸線會逐漸往彎內側旋轉,同時也將重心的位置往彎內側移動。讓汽車的車身往彎內側偏滑,而使車輛的行進路線移往彎內側,最後車輛的行進路線就會從轉向不足變成轉向中性,於是車輛便得以平穩且安全的通過彎道。
當車輛在過彎的時發生轉向不足的情況,這時候由於車身需要修正的方向和轉彎的方一致,因此VDC在利用ABS對車輪進行煞車時,只需要針對彎內側的後輪做煞車動作,就可以讓車身獲得足夠的轉向力矩去改變車身在行駛中的動態,以避免車輛發生過度修正的情形而發生駕駛上的困擾與車身的晃動。所以在發生轉向不足時VDC只對彎內側的後輪做煞車,就是為了要在迅速調整車身動態的同時,讓車輛仍然保有優良的乘坐舒適性。
丰田轿车VSC 主动安全系统
1 简介
车辆动态稳定性控制系统(VSC) 是一种可在各种行驶条件下提高车辆行驶稳定性的新型主动安全体系。VSC 控制系统增强了制动防抱死系统(ABS)、牵引力控制系统(TCS) 以及发动机扭矩控制系统的功能, 其功能处于比ABS 和TCS 更高的控制层次统计资料显示, 在重大死亡车祸中, 约1 /6是由于车辆失控造成的; 而在车辆失控事件中,由车辆打滑造成的占到了75%。丰田VSC 系统利用控制单元与制动系统及发动机系统相联, 随时监测车身的动态状况, 当出现打滑现象时, 系统自动介入油门与制动的操作, 控制发动机的功率输出, 并适时对适当的车轮施加制动, 以利用有附着力的轮胎, 使车辆稳定减速, 修正车辆的动态, 使其稳定行驶在本来的行驶路线上, 保证车辆安全。
丰田公司开发的VSC (Vehicle Stability Control)车辆动态稳定性控制系统, 首见于1997 年推出的Lexus 车系中, 现已普及至Lexus 及Toyota旗下大部分的车辆: 花冠、锐志、皇冠、佳美、霸道等等。在2007年3月新推出的锐志2.5S特别天窗版中,更是增加了VSC系统作为其一个卖点。作为ABS、TCS (亦称TRC 驱动防滑转或ASR 加速防滑控制系统) 系统的功能扩展, 车辆动态稳定控制系统已成为主动安全系统发展的一个重要方向。
VSC 系统在汽车高速转弯将要出现失控时, 可有效地增加汽车的稳定性, 系统通过对从各传感器传来的车辆行驶状态信息进行分析, 向制动防抱死系统ABS、牵引力控制系统TCS 发出纠偏指令, 帮助车辆维持动态平衡, 减少事故发生。VSC 系统可使车辆在各种状况下保持最佳的稳定性, 在过度转向或不足转向的情形下作用尤为明显。
目前不同厂家对车辆稳定性控制系统的称谓不同, 如宝马公司将其称为DSC 系统; 保时捷则称其为PSM; 本田公司称为VSA 系统。VSA 及VSC 系统与奔驰公司的VSC 均属同一类系统, 是转向时对由制动力产生危险的汽车进行动态修正的主动安全装置。区别在于VSC 和VSC 是用于前置发动机后轮驱动车辆(FRV); 而本田的VSA是为FFV 车辆开发的。
2 VSC 系统工作原理
研究表明车辆打滑最主要的原因, 是由于路面状况的突然改变, 使部分车辆失去附着力, 造成车辆失去操控性; 或是由于驾驶员为闪躲路面突然出现情况而出现的过当操作, 使车辆所需的动态超过车轮附着力的上限, 因而造成打滑, 产生行车危险。
VSC 系统可在车辆行驶时随时监测由各传感器所提供的车辆动态信息, 以了解车辆目前的状况。当车身打滑, 各传感器信息与平稳行驶的数据不同时, 系统据此判断出车辆出现打滑情况,自动介入车辆的操控, 以油门及制动控制器来修正车辆的动态。由于所有打滑现象均是因为部分车轮超过了该轮所能承担的附着力而造成的, 因此针对打滑问题而开发的VSC 系统可提供高标准的主动安全。
图1:VSC系统能够避免抓地力的丧失
当前轮或后轮的抓地力达到极限时, 汽车转向的稳定性就会受到极大的影响。车辆转弯行驶时, 如前轮首先达到附着(抓地) 极限, 则会引起“漂出”现象(不足转向), 此时驾驶员怎样打转向盘也不能减小转弯半径, 从而难以循踪行驶, 出现转向失灵。而如果后轮首先达到附着极限, 则将造成“甩尾”现象(过度转向), 车辆本身会变得不稳定, 汽车被快速拉向转向一侧。VSC 系统通过对不同车轮独立地实施制动, 使车辆产生相应的回转力矩, 以避免“漂出”和“甩尾”现象的产生。
为抑制前轮的侧滑, 首先制动后轮, 以产生向内旋转运动, 然后对4 个车轮进行
制动, 使车速降到某一水平, 以平衡旋转运动, 使转向在转弯力的范围内进行。当出现后轮侧滑时, 外前轮被制动, 以产生向外旋转的运动, 确保汽车的稳定性。
3 VSC 系统构成
VSC 系统是由VSC 控制系统、发动机电控系统、各传感器、制动控制器、油门控制器等单元构成的完整控制体系。系统的大部分元件与ABS、TCS 系统共用, 传感器部分增加了用于检测汽车状态的车身横摆率传感器和减速度传感器(G 传感器); ECU 部分增强了运算能力; 执行器部分改进了前轮的液压通道; 信息显示部分增加了VSC 蜂鸣器。
图2:VSC系统构成1、带有ECU的液压调节器2、轮速传感器3、转向角传感器4、横摆角速度传感器和侧向加速度传感器
VSC 系统主要由以下几部分组成:
(1) 用于检测车辆状态和驾驶员操作的传感器部分①车身横摆率传感器(亦称横摆角速度传感器、侧滑传感器或翻转角速度传感器)。该传感器安装在汽车行李舱前部, 与汽车垂直轴线平行, 用于检测汽车的横摆率(汽车绕垂直轴旋转的角速度)。它记录汽车绕垂直轴线的运动, 用来监测车辆后部因侧滑发生的甩尾。作用类似飞机陀螺, 时刻监视着汽车方向的稳定性, 确定汽车是否在打滑, 使汽车保持相对于垂直轴线的稳定性。②减速度传感器(G 传感器)。G 传感器水平安装在汽车重心附近地板下方的中间位置, 以检测汽车的纵向和横向加速度。对转弯时产生的离心力起反应, 确定车辆是否在通过弯道时打滑。③转向角度传感器。传感器安装在转向盘后侧, 监测转向盘旋转的角度, 帮助确定汽车行驶方向是否正确。④制动液压传感器。制动液压传感器安装在VSC 的液压控制装置上部, 用于检测驾驶员进行制动操作时制动液压的变化。⑤轮速传感器。轮速传感器安装在每个车轮上, 用于检测各车轮的角速度, 确定车轮是否打滑。⑥节气门开度传感器。节气门开度传感器安装在节气门执行器上, 以检测节气门开启度角的变化。
(2) VSC 系统执行控制器ECU 部分该ECU 安装在车厢内, 通过线束与每个传感器和执行器相连; 用于估算汽车侧滑状态和计算恢复到安全状态所需的旋转动量和减速度。
(3) 执行器部分根据计算结果, 执行器部分用于控制每个车轮制动力和发动机输出功率, 包括:①节气门执行器。该执行器安装在发动机进气通道上, 在VSC 控制发动机输出功率期间,由它来控制发动机节气门开闭。②液压控制装置。VSC 液压控制装置主要由供能装置、制动总泵及制动助力器、选择电磁阀、控制电磁阀 4 部分组成。③供能装置。由
电机驱动的液压泵和蓄压器组成。蓄压器贮存由液压泵供应的液压油, 作为液压装置的压力源。④制动总泵和制动助力器。根据驾驶员的制动操作产生液压, 并进行助力。⑤选择电磁阀。当VSC、TRC 或ABS 系统工作时, 它关闭制动总泵的液压油输送, 并把从供能部分(动力液压) 来的液压油或从制动助力器(调节液压) 来的液压油送到控制电磁阀, 从而控制每个车轮分泵的液压。⑥控制电磁阀。当VSC、TRC 或ABS 工作时, 通过增加或降低每个车轮分泵的液压, 以控制各车轮的制动力。
(4) 信息显示部分VSC 系统以驾驶员为主要操作者, 通过警示装置(指示灯和蜂鸣器) 向驾驶员提供车辆或VSC 系统工作状态信息, 预警车辆在高速转弯时可能出现的失控, 确保安全行驶。信息显示部分主要由VSC 工作指示灯、VSC蜂鸣器、侧滑指示灯、多路信息显示器(含VSC故障警告指示) 组成。
4 VSC 系统工作过程
驾驶员对制动踏板的操作力传递到VSC 液压控制装置, 正常情况下, 系统执行常规的制动助力功能; 当车轮在加速或减速下出现滑移时,执行TCS 和ABS 功能; 当汽车出现侧滑时, 系统执行VSC 功能, 将受到控制的制动液压施加到每个车轮。由于VSC 系统可在汽车高速转弯将要出现失控时有效地增加汽车稳定性来减少事故的发生, 因此必须按照车辆的状态来自动地对各个车轮进行制动。系统通过检测汽车的状态和驾驶员的操作, 根据估算出汽车失稳的程度来计算恢复汽车稳定所需的旋转运动和减速大小, 并相应地控制每一个车轮的制动力和发动机的动力输出。
图3:VSC抑制转向不足(左)和转向过度(右)
(1) 抑制前轮侧滑(转向不足)。
前轮的侧滑造成汽车有朝转向外侧前轮偏移的趋势, 形成不足转向,即在进入弯道时轿车的转向半径大于弯道的半径,在这种情况下, 轿车很容易冲出路面。为确保车辆的循迹行驶, 首先要通过减速,有效地减小所需的转向力, 并利用后轮保留的转向力, 额外地增加向转向角内侧的旋转运动(此时, 后轮也可以产生最大的转弯力);因此首先要制动后轮,以得到向内旋转的运动, 然后对 4 个车轮进行制动, 使车速降到某一水平来平衡旋转运动,使转向在转弯力的范围内进行。系统通过对位于转向内侧后轮施加经过精确计算的脉冲瞬时制
动力,以产生预定的滑动率,导致该车轮受到的侧向力迅速减少而纵向制动力迅速增大, 于是产生了一个与横摆方向相同的横摆力矩。其目的也是要产生回复至正常行驶路径的力量,从而使车辆在转弯的行驶过程中具有良好的行驶方向稳定性。当因前轮产生侧滑而出现“漂出” (不足转向) 现象时, VSC 系统将制动力施加到2个后轮上。VSC 液压控制装置通过选择电磁阀和控制电磁阀的动作把经调节的供能部分的动力液压油送至2 个后轮制动轮缸。
(2) 抑制后轮侧滑(转向过度)。
为抵消后轮的侧滑, 可以额外增加向外的旋转运动, 以防止汽车的不稳定性。所以, 当出现后轮侧滑时, 制动外前轮,以产生向外的运动, 确保汽车的稳定性。当后轮产生侧滑而使汽车滑移角增加时,VSC 系统立即将制动力施加到正在转弯的外前轮上。VSC 液压控制装置通过选择电磁阀和控制电磁阀的动作把经过调节的供能部分动力液压油送至正在转弯的外前轮制动轮缸, 控制电磁阀由通断占空比来驱动, 以把动力液压调节控制到合适的水平。例如, 行驶在路滑的左侧弯道上的车辆, 当过度转向开始使得车子向右甩尾时, VSC 传感器感觉到了滑动, 就迅速让右前轮制动, 使汽车产生顺时针方向的转矩, 从而将汽车保持在原来的车道内。
5.VSC的实际作用:
1.行驶工况:在多变的路面上行
驶
●没有装备VSC
①车辆跑偏(转向不足),即前轮
向外偏离弯道,车辆失去控制。
②一旦驶入干燥的沥青路面,车
辆就开始打滑。
●装备有VSC
车辆表现出转向不足的趋势,即
将跑偏,增加右后轮制动力的同时降
低发动机输出扭矩至车辆保持稳定。
2.行驶工况:避让障碍物
●没有装备VSC
①紧急制动,猛打方向盘,车辆
转向不足。
②车辆继续;中向障碍物,驾驶
员反复打方向盘,以求控制车
辆,车辆避开障碍物。
③当驾驶员尝试恢复正常行驶路线时,车辆产生侧滑
●装备有VSC
①紧急制动,猛打方向盘,车辆转向不足。
②增加左后轮制动力车辆按照转向意图行驶。
③恢复正常的行驶路线,车辆有转向过度的倾向上施加制动力至车辆保持稳定。
3.驾驶员转弯过快
●没有装备VSC
①出现甩尾,企图通过方向盘来调整方向辆侧滑。
●装备有VSC
①车辆有甩尾的倾向,自动在右前轮上施加制动力至车辆保持稳定。
②车辆有甩尾的倾向,自动在左前轮上施加制动力至车辆保持稳定。
6 最后的话
一般来讲, ABS 和TCS 只能改善轮胎和路面间的附着系数利用率(即改善纵向动力学性能);TCS 系统减少轮胎无谓的磨损和功率消耗。而VSC 除此之外还能识别并控制车辆的偏转力矩(改善横向动力学性能), 该系统根据“所有外部作用于车辆上的力(如制动力、推动力、侧向力), 都会使车辆绕其质心而转动”的原理, 通过对1 个以上的前、后车轮进行制动干预, 使车辆按预定轨迹稳定地行驶, 即使车辆在湿滑的路面上仍能保持稳定的驾驶性能。
需要说明的是: 虽然VSC 系统可迅速的将车辆于转弯过程中出现转向过度或转向不足的现象修正到原有正常路径的循迹行驶, 但其也同样遵循汽车动力学原理, 因此其只能在一定的行车极限内实现行车稳定控制。如车速过快, 在某些情况下仍可能发生事故。
本田VSA车辆稳定性控制系统
Vehicle Stability Assist Control
在各种条件下控制不可预测的动向,辅助驾驶员的操作
怎样才能准确地对应各种路面条件和突然的路况变化,提供准确的行驶呢。讲述这种高度的行驶特性时自然要提到VSA。
VSA是一种综合控制制动时防止车轮抱死的ABS、加速时防止车轮空转的TCS(驱动力控制系统)、还有防止转弯时横向打滑这三种功能的先进车身稳定辅助系统。通过控制所有车轮,使均衡的转向性能更加精益求精。并且和DBW(电信号控制)的协调控制使驾驶平稳度得到了很大提高。
●VSA说到底是辅助驾驶员制动、制动等操作的系统。
●所以应该和没有装备VSA的车型一样,在进入弯道之前需要充分减速,粗野驾驶是控制不住的。希望能够安全驾驶汽车。
DSC 动态稳定控制系统
DSC是DynamicStabilityControl的简称,即动态稳定控制系统。
这是为加速防滑控制或循迹控制系统的进一步延伸,能确保车子在转弯时仍能拥有最佳的循迹性,以确保行车的稳定性,DSC系统为了要使车子在转弯时仍有好的循迹性,配有更先进的侦测及控制配备,如有能侦测车轮转速外,还有侦测方向盘转动的幅度、车速、以及车子的侧向加速度,根据以上所侦测到的资讯,来判断车轮在转弯过程中是否打滑的危险,如果会有打滑的危险或已经打滑,则电脑马上会命令制动油压控制系统将打滑的车轮进行适当的制动作用,或着是以减少喷油量、延迟点火的方式来降低引擎力量的输出,达到了轮胎在各种行驶条件下防止打滑的现象,进而使车辆无论在起动加速、再加速、转弯等过程都能获得好的循迹性。
DSC 汽车电子稳定系统
性能类似德国博世公司的ESP(电子稳定系统)可在汽车高速运动时,提供良好的操控性,防止车辆发生甩尾或者漂移现象,从而获得精准的操控性。是电子主动安全保护系统的一种。
由于ESP名称已经被德国博世公司注册。故其他公司开发的电子稳定系统只能使用其他名称。如DSC
车身稳定控制(ESP/DSC/VSC等) 简介 ESP是英文Electronic Stability Program的缩写,中文名字叫电子稳定程序。也有些汽车公司采用自己的缩写,比如沃尔沃公司叫STC,宝马车上被叫作DSC,而丰田凌志又称其为VSC,但它们的基本原理和所起到的作用跟ESP是一致的。 ESP负责随时监控汽车的行驶状态,它能够通过自动地向一个或多个车轮施加制动力,甚至在某些情况下每秒进行150次制动,以把车子保持在司机所选定的车道内。目前它有3种类型: ·能自动向全体4个车轮独立施加制动力的四通道或四轮系统; ·只能对两个前轮独立施加制动力的双通道系统; ·能对两个前轮独立施加制动力而对后轮只能一同施加制动力的三通道系统。
ESP与ABS及牵引力控制系统共同工作,但跟它们不同的是它不需要司机对它进行操作,而是根据实际情况自己作出反应。装上了ESP的汽车不再盲目服从司机,例如能纠正司机的过度转向和不足转向。比如:一辆汽车行驶在路滑的左弯道上,当过度转向开始使得车子向右甩尾时,ESP的传感器感觉到了滑动,就迅速让右前轮制动,使汽车产生顺时针方向的转矩,而将汽车保持在原来的车道内;当不足转向使前轮驶离路面而丧失对地面的附着力时,四通道的ESP就让左后轮制动,由此产生逆时针方向的转矩使汽车回到正确路线上(如果车上装的是双通道的ESP,则会使左前轮制动)。 ESP对过度转向和不足转向感觉的灵敏度超过了世界上最优秀的赛车运动员。如今,有博世、电装(Denso)、Continenta l Teves、德尔福、Aisin Seiki和TRW等6家汽车零部件供应商在生产ESP。ESP的工作以微型电脑的算法为依据。微电脑对来自几个传感器的信息进行评估。虽然各个厂家所用的软件不同,但它们的ESP都有下述硬件: 转向传感器:它监测转向盘旋转的角度,帮助确定汽车行驶方向是否正确。 车轮传感器:它监测每个车轮的速度,确定车轮是否在打滑。 侧滑传感器:它记录汽车绕垂直轴线的运动,确定汽车是否在打滑。 横向加速度传感器:它对转弯时产生的离心力起反应,确定汽车是否在通过弯道时打滑 现在ESP主要应用于一些高端车型,如奔驰、奥迪等,在欧盟地区,新车ESP装备率已达35%,而国内的新车ESP系统装备率还只有3%,随着人们对车辆安全性的要求日益提高,ESP将会被越来越多的车辆所应用。
汽车电子稳定系统(ESP)( 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS 和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶稳定性。
汽车电子稳定系统(ESP) 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶稳定性。 图1是汽车电子稳定系统ESP的各种传感器及电子稳定系统ECU在轿车上的安装,其ECU 中配置了两台56kB内存的微机。ESP系统利用这两台微机和各种传感器信号不间断地监控车内电子模块、系统的工作状态和汽车的行驶姿势,比如,速度传感器每相隔20ms就会自检一次。ESP系统还通过车内电子模块之间的信号交流通信网络,充分利用防抱死制动系统ABS、制动助力系统BAS和驱动防滑控制系统ASR等的先进功能。紧急情况下,如紧张的驾驶员对制动力施加不够,制动助力系统BAS将自动增大制动力。在ESP系统出现故障不能正常工作时,ABS和ASR系统能照样工作,以保证汽车正常行驶和制动。
浅谈汽车电子稳定程序 前言 随着汽车行驶速度的提高,道路行车密度的增大,汽车行驶安全性已经受到了高度关注。汽车的行驶安全性能要求不断提高,汽车安全系统已经成为汽车研究发展的重要部分。 汽车安全性包括主动安全性和被动安全性两大类。汽车主动 安全是指事故发生前的安全,即实现事故预防和事故回避,防止 事故发生。主动安全性是指通过事先预防,避免或减少事故发生 的能力。被动安全性是指汽车在发生意外事故时对乘员进行有效 保护的能力。汽车的主动安全性因其防患于未然,所以越来越受 到汽车厂商和消费者的重视,越来越多的先进技术也被应用到汽 车主动安全装置上。主动安全性的好坏决定了汽车产生事故发生概率的多少,而被动安全性的好坏主要决定了事故后车内成员的受伤严重程度。 目前广泛运用的汽车主动安全性系统主要有防抱死制动系统(ABS)、驱动防滑系统〔ASR〕、牵引力控制系统 (TCS)、汽车电子稳定程序系统(ESP),汽车电子制动力分配系统(EBD), 紧急刹车辅助系统 (EBA)、汽车自适应巡航速度控制系统(ACC)等,保证汽车在危险状况下行驶的安全性。上述这些系统具有智能化的控制作用,根据车辆的行驶状况,自动地完成对汽车制动性能、转向辅助等的控制,无需人的主动性操作,可见汽车安全系统已经向智能型方向发展。
摘要 本文探讨了ESP系统的原理、发展和现状。简要讨论汽车 ESP 系统的结构及关键技术。介绍新奥迪 A4轿车 ESP系统的组成、电控系统、液压单元及工作过程。 关键词:电子稳定程序,主动安全性,操纵稳定性,模糊控制传感器液压控制单元电子控制单元 ESP系统实际是一种牵引力控制系统,与其他牵引力控制系统比较,ESP不但控制驱动轮,而且可控制从动轮。如后轮驱动汽车常出现的转向过多情况,此时后轮失控而甩尾,ESP便会刹慢外侧的前轮来稳定车子;在转向过少时,为了校正循迹方向,ESP则会刹慢内后轮,从而校正行驶方向。 ESP系统是汽车上一个重要的系统,通常是支持ABS及ASR 的功能。它通过对从各传感器传来的车辆行驶状态信息进行分析,然后向ABS、ASR发出纠偏指令,来帮助车辆维持动态平衡。ESP可以使车辆在各种状况下保持最佳的稳定性,在转向过度或转向不足的情形下效果更加明显。ESP一般需要安装转向传感器、车轮传感器、侧滑传感器、横向加速度传感器等。 ESP系统包含ABS(防抱死刹车系统)及ASR(驱动防滑转系统),是这两种系统功能上的延伸。因此,ESP称得上是当前汽车
汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是 防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶 稳定性。 图1是汽车电子稳定系统ESP的各种传感器及电子稳定系统ECU在轿车上的安装,其ECU中配置了两台56kB内存的微机。ESP系统利用这两台微机和各种传感器信号不间断地监控车内电子模块、系统的工作状态和汽车的行驶姿势,比如,速度传感器每相隔20ms就会自检一次。ESP系统还通过车内电子模块之间的信号交流通信网络,充分利用防抱死制动系统ABS、制动助力系统BAS和驱动防滑控制系统ASR等的先进功能。紧急情况下,如紧张的驾驶员对制动力施加不够,制动助力系统BAS将自动增大制动力。在ESP系统出现故障不能正常工作时,ABS和ASR系统能照样工作,以保证汽车正常行驶和制动。
汽车稳定控制系统相关知识 电子稳定控制系统概念 汽车电子稳定控制系统是车辆新型的主动安全系统,是汽车防抱死制动系统(ABS)和牵引力控制系统(TCS)功能的进一步扩展,并在此基础上,增加了车辆转向行驶时横摆率传感器、测向加速度传感器和方向盘转角传感器,通过ECU 控制前后、左右车轮的驱动力和制动力,确保车辆行驶的侧向稳定性。 该系统由传感器、电子控制单元(ECU)和执行器三大部分组成,通过电子控制单元监控汽车运行状态,对车辆的发动机及制动系统进行干预控制。典型的汽车电子稳定控制系统在传感器上主要包括4个轮速传感器、方向盘转角传感器、侧向加速度传感器、横摆角速度传感器、制动主缸压力传感器等,执行部分则包括传统制动系统(真空助力器、管路和制动器)、液压调节器等,电子控制单元与发动机管理系统联动,可对发动机动力输出进行干预和调整。 这套系统主要对车辆纵向和横向稳定性进行控制,保证车辆按照驾驶员的意识行驶。电子稳定控制系统的基础是ABS制动防抱死功能,该系统在汽车制动情况下轮胎即将抱死时,一秒内连续制动上百次,有点类似于机械式“点刹”。如此一来,在车辆全力制动时,轮胎依然可以保证滚动,滚动摩擦的效果比抱死后的滑动摩擦效果好,且可以控制车辆行驶方向。
另一方面该系统会与发动机ECU协同工作,当驱动轮打滑时通过对比各个车轮的转速,电子系统判断出驱动轮是否打滑,立刻自动减少节气门进气量,降低发动机转速从而减少动力输出,对打滑的驱动轮进行制动。这样便可以减少打滑并保持轮胎与地面抓地力之间最合适的动力输出,此时无论怎么给油,驱动轮都不会发生打滑现象。 该系统在保证车辆横向稳定性方面体现在当系统通过转角传感器、横向加速度传感器及轮速传感器的信号发现车辆发生了转向不足或过度时,系统会控制单个或是多个车轮进行制动,来调整汽车变换车道或在过弯时的车身姿态,使汽车在变换车道或是过弯时能够更加的平稳而安全。 目前,世界范围内主要供应电子稳定控制系统的供应商有六家,分别是博世、天合、电装、爱信精机、大陆、京西重工(收购了德尔福底盘系统公司),众厂家的系统也基本都是从这几家采购而来,再冠以不同的名字。不过,即使是同一系统在不同车型上的功能也会有不同,这里我们只说最基本的功能。
汽车电子控制系统主要由传感器,控制单元和执行器三部分组成。根据控制功能不同,汽车电子控制系统可为动力性,经济与排放性,安全性,舒适性,操纵性,通过性和信息控制系统七种类型。根据汽车总体结构,汽车电子控制系统可分为发动机电子控制系统,底盘电子控制系统,车身电子控制系统和综合控制系统四大类。(1)汽车发动机电子控制系统。它主要包括;电子控制发动机燃油喷射系统( EFI ), 空燃比反馈控制系统 ( AFC), 怠速控制 系统( ISC), 断油控制系统,燃油蒸汽回收控制系统,排气再循环控制系统,加速踏板控制系统(EAP ,微机控制点火系统(MCI), 发动机爆震控制系统(EDC,进气控制系统,增压控制系统和汽车巡航控制系统(CCS) 第二代车载故障诊断系统(0BD-11)等。 ( 2)汽车底盘电子控制系统。它主要包括; 电子控制自动变速系统(ECT,防抱死控制系统(ABS,电子控制制动力分配系统(EBD,电子控制制动辅助系统(EBA,动态稳定控制系统(DSC,驱动防滑控制系统(ASR,电子控制动力转向系统(EPS ,电子控制悬架系统(ECS ,轮胎气压控制系
统(TPQ, 等。 ( 3)汽车车身电子控制系统。它主要包括; 辅助防护安全气nan系统(SRS ,安全带张紧控制系统(STTS,车辆保安系统(VESS, 中央门锁控制系统(CLCS,前照灯控制与清洗系统(HAW,刮水器与清洗器控制系统 (WWCS座椅调节系统(SAMS。( 4)汽车综合控制系统。它主要包括;维修周期显示系统(LSID),液面与磨损监控系统 ( FWM)S 车载计算机( OBC)车载电话 ( CPH),交通控制与通信系统(TCIS),信息显示系统(IDS),控制器区域网络系统(CAN,自动空调系统(ACS,雷达车距控制系统,倒车防撞报警系统(PWS,等。
Electronic technology ? 电子技术 Electronic Technology & Software Engineering 电子技术与软件工程? 123 【关键词】电子稳定系统 Carsim 联合仿真 Fishhook 控制算法 电子稳定性控制系统(Electronic Stability Control, ESC)是一种新型主动安全系统,是ABS 和TCS 两种系统功能的延伸。电子稳定性控制系统在实现按理想轨迹行驶的同时,改善汽车的方向稳定性和操控性能。 由于考虑到电子稳定系统研制的复杂性,特别是在ESC 试车时所需运行工况都是非常恶劣和危险的,加快研发进度和研发的经济效益,在研究初期,对电子稳定系统进行软件仿真显得尤为重要。 1 电子稳定系统构成与工作过程 1.1 ESC系统结构组成 汽车ESC 系统主要由电子控制单元(ECU)、各种传感器及执行器三部分组成。 (1) ESC 系统中的传感器主要有:横摆角速度传感器、轮速传感器、转向传感器、侧滑传感器、横向加速度传感器、制动压力传感器、纵向加速度传感器、车身翻转角速度传感器等,采用这些传感器采集汽车行驶状况的各种信息。 (2)电子控制单元(ECU):电控单元ECU 接收上述各传感器的信号后,然后进行分析、判断、计算从而得出汽车的运行状态,进而发出控制指令,控制一个或多个车轮制动器的制动力,使汽车按照驾驶员所期望的理想路线行驶。 (3)执行器:接收电子控制单元(ECU)发出的命令信号,同时执行控制信号。ESC 系统中的执行器:制动系统和发动机管理系统。1.2 ESC系统工作过程 ESC 系统的工作过程可概括为信号采集、信号处理计算及ECU 判断、执行器执行。 2 基于CARSIM与SIMULINK联合控制仿真平台 Carsim 车辆电子稳定系统控制分析 文/朱成水 张天华 陆盛祥 2.1 电子稳定系统联合仿真平台构建 (1) 点击图中Test Speci ?cation 的下三角,选择相应的车型,或者点击进入根据参数建立自己实际所要车型。 (2)在Procedure 下新建或一个所要求的仿真工况(或选择满足用户需求的已有工况): (3) Simulink 接口 A :点击Model 图标所示的下三角,选择‘Models:Simulink ’。 B:自定义carsim 车型的在simulink 中的输入输出变量,选择simulink 的工作路径(已经建立的simulink 的文件)。 1、定义CarSim 的导入变量: 选择‘I/O Channels:Import ’,然后按 图1:ESC 系统结构图 图2:有无ESC 控制的.mdl
EBD和ESP都是ABS下的延伸电子系统 EBD的英文全称是Electric Brake force Distribution,中文翻译为电子制动力分布,EBD系统是当重踩制动在ABS作动之前,可平衡每一个轮的有效地面抓地力,主要是用来改善制动力的平衡并缩短制动距离。EBD可依据车辆的重量和路面条件,当制动时此系统会自动以前轮为基准去比较后轮轮胎的滑动率,如发觉差异且此差异程度是必须被调整时, 则此时制动油压系统将会调整传至后轮的油压以得到更平衡且更接近理想化制动力的分布。 EBD能够根据由于汽车制动时产生轴荷转移的不同,而自动调节前、后轴的制动力分配比例,提高制动效能,并配合ABS提高制动稳定性。汽车在制动时,四只轮胎附着的地面条件往往不一样。比如,有时左前轮和右后轮附着在干燥的水泥地面上,而右前轮和左后轮却附着在水中或泥水中,这种情况会导致在汽车制动时四只轮子与地面的摩擦力不一样,制动时容易造成打滑、倾斜和车辆侧翻事故。EBD用高速计算机在汽车制动的瞬间,分别对四只轮胎附着的不同地面进行感应、计算,得出不同的摩擦力数值,使四只轮胎的制动装置根据不同的情况用不同的方式和力量制动,并在运动中不断高速调整,从而保证车辆的平稳、安全。 答案补充 ESP的英文全称是Electronic Stability Program,中文翻译为电子稳定程序,ESP系统由控制单元及转向传感器(监测方向盘的转向角度)、车轮传感器(监测各个车轮的转动速度)、侧滑传感器(监测车体绕垂直轴线转动的状态)、横向加速度传感器(监测汽车转弯时的离心力)等组成。控制单元通过这些传感器的信号对车辆的运行状态进行判断,进而发出控制指令。有ESP与只有ABS及ASR的汽车,它们之间的差别在于ABS及ASR只能被动地作出反应,而ESP则能够探测和分析车况并纠正驾驶的错误,防患于未然。ESP对过度转向或不足转向特别敏感,例如汽车在路滑时左拐过度转向(转弯太急)时会产生向右侧甩尾,传感器感觉到滑动就会迅速制动右前轮使其恢复附着力,产生一种相反的转矩而使汽车保持在原来的车道上。这套系统是由博世公司研发,最初只应用在高档车上,现在也在逐渐向中高档汽车上延伸。ESP系统能够给乘客提供更高的安全保障,无论是在高速行使时的紧急避障,还是在湿滑路面的急打方向,ESP系统都能提供快速准确的方向响应,保证车身行驶稳定。 答案补充 当然,无论EBS和ESP的作用效果有多好,终归是有它的物理极限的,不在万不得已的情况下,还是谨慎驾驶最最安全。
10.16638/https://www.doczj.com/doc/d18273530.html,ki.1671-7988.2018.12.040 汽车电子稳定性控制系统现状及标准分析 赵永刚1,吕彪2 (1.重庆车辆检测研究院有限公司,重庆401122;2.上海万象汽车制造有限公司,上海201611) 摘要:汽车电子稳定性控制(Electronic Stability Control,简称ESC)系统通过调节车辆行驶和制动过程中牵引力和制动力分配,能有效提高车辆行驶及制动过程中的安全性能。文章介绍了ESC系统的组成、工作原理、国内外研究现状以及国内外标准法规现状,并对国内外标准法规进行了分析比较。 关键词:ESC系统;现状;标准 中图分类号:U461.99 文献标识码:B 文章编号:1671-7988(2018)12-113-03 Standardized On-Road Test of City bus Zhao Yonggang1, Lu Biao2 (1.Chongqing Vehicle Test &Research Institute Co., Ltd, Chongqing 401122; 2.Shanghai vientiane automobile manufacturing Co., Ltd, Shanghai 201611) Abstract: Electronic stability control system by adjusting the vehicle traction and braking force of during driving and braking, can effectively improve the safety performance in the process of vehicle driving and braking. This paper intro -duces composition of ESC system, working principle, research status domestic and foreign , situation of domestic and foreign standards research, and analyzes and compares domestic and foreign standards of status quo. Keywords: Electronic Stability Control system; Standard; The status quo CLC NO.: U461.99 Document Code: B Article ID: 1671-7988(2018)12-113-03 前言 车辆操纵稳定性是汽车安全领域的长期研究课题,随着汽车底盘系统的逐渐电子化和智能化,针对车辆操纵稳定性的汽车电子稳定性控制(Electronic Stability Control,简称ESC)系统已经成为该领域的热点研究课题之一。国内对ESC系统的研究起步较晚,特别是重型车的ESC系统的研究尚处于理论分析阶段,目前还没有相对成熟的重型车ESC 系统测试方法标准发布。开展汽车电子稳定性控制系统现状及标准体现的分析,有助于推进我国现有车辆ESC系统的装车调试,对提升汽车安全技术水平意义重大。1 ESC系统介绍 美国国家公路交通安全管理局于2007年对ESC系统进行了标准化的定义,规定ESC必须具备以下特征:1)通过对单个车轮进行制动力调来产生一个横摆力矩,从而增强汽车的方向稳定性;2)由计算机控制,通过闭环控制算法来限制汽车的转向;3)具备测量汽车横摆角速度以及估算汽车质心侧偏角的方法;4)具备监测驾驶员转向输入的方法;5)具有控制算法来确定是否有改变发动机输出扭矩的需要,并且有相应的方法来实现输出转矩的调节,帮助驾驶员保持对汽车的控制。为了实现ESC系统的上述功能,ESC系统应用了先进的传感器、电子控制单元、执行器等有关技术。图1展示了ESC系统的组成。 在具体的工作过程中,ESC系统经过传感器信息处理和 作者简介:赵永刚(1984-),男,硕士,就职于重庆车辆检测研究 院有限公司,从事汽车测试技术与研究。 113
汽车电子控制技术汽车类专业应用型本科示范教材 机械工业出版社出版主编于京诺
第3章 汽车行驶稳定性控制系统 ?学习目标 ?·了解ABS、ASR的基础理论。 ?·了解ABS、ASR的组成和分类。 ?·掌握ABS的结构和工作原理。 ?·掌握ASR的结构和工作原理。 ?·了解ESP的功能。 ?·掌握ESP的结构和工作原理。
3.1 防抱死制动系统(ABS 3.1.1 概述 1.ABS 的基础理论 第3章 汽车行驶稳定性控制系统 (1)汽车制动时的附着条件 地面制动力只能小于或等于附着力: (3-1) 附着力正比于地面对车轮的法向反作用力F Z以及车轮与地面之间的附着系数,即 (3-2) 在地面对车轮的法向反作用力F Z一定的情况下,附着力的大小取决于附着系数。附着系数的大小与路面和轮胎的性质有关,还与车轮的滑移率有关。 ?F F X ≤??Z F F =
(3)附着系数与滑移率的关系 车轮与地面之间的附着系数会随着车轮滑移率的变化而变化,干燥硬实路面附着系数与滑移率的关系如图3-1所示。 开始时随着滑移率的增大, 纵向附着系数迅速增大,当滑 移率达到约20%时,纵向附着 系数达到最大值。当滑移率达 到100%,即车轮完全被抱死滑 移时,其附着系数称为滑动附 着系数。当滑移率为0时,横 向附着系数最大,随着滑移率 的增大,横向附着系数逐渐减 小,当滑移率达到100%时,横 向附着系数接近于零。 图3-1 干燥硬实路面附着系数与滑移率的关系
(4)汽车采用ABS的必要性 由附着系数与滑移率之间的关系可知,汽车制动时如果车轮完全抱死,就纵向附着系数而言,其滑动附着系数低于峰值附着系数,这将使车轮完全抱死时的制动距离比具有峰值附着系数时的制动距离变长;就横向附着系数而言,由于在车轮抱死时的横向附着系数接近于零,汽车几乎失去了横向附着能力,因此使汽车的方向稳定性变差,一旦汽车遇到横向干扰力的作用,就可能产生侧滑、甩尾甚至回转等情况。另外,一旦转向车轮抱死,汽车不会按照转向轮偏转的方向行驶,而是沿汽车行驶惯性力的方向向前滑动,从而使汽车失去转向控制能力。 综上所述,汽车制动时车轮抱死会使制动距离变长,方向稳定性变差,失去转向控制能力,因此制动时应避免车轮抱死。汽车上采用ABS的目的就是避免制动时车轮抱死,将滑移率控制在10%~30%,在此范围内既有最大的纵向附着系数,使制动距离最短,又有较大的横向附着系数,以获得较好的横向稳定性和转向控制能力。
基于汽车稳定性控制系统的侧翻控制策略 摘要:随着汽车产业的迅速发展,人们对汽车各方面性能要求的不断提升,特别是针对汽车安全性的高度关注和需求,从而不断的促使着汽车产业在汽车安全行驶方面寻求技术改进和突破。为了提高汽车在行驶过程中的安全性能系数,基于汽车电子稳定性控制系统(Electronic Stability Program,ESP)的侧翻控制策略,针对汽车的主动转向控制建立了以汽车2自由度为参考模型建立了8自由度的汽车动力学模型的侧翻控制策略,主要采用改变转向轮的转向角度,从而减小汽车的侧向加速度,提高汽车的侧翻控制能力。其次,根据汽车在行驶过程中制动系统以及悬架的变化情况建立了10自由度整车侧翻动力学模型,应用车辆动力学和轮胎力耦合特性,提出车辆侧翻控制策略。通过制动矩的差动调节和半主动悬架阻尼力的适时匹配,实现对车辆侧翻的有效控制。通过对转向系统和制动系统及悬架的控制研究,大大提高汽车在行驶过程中的稳定性。 关键词:汽车稳定性,悬架控制,转向控制,车辆侧翻,制动控制。
Rollover control strategy based on vehicle stability control system Abstract: With the rapid development of automobile industry, car performancerequirements of all aspects, especially in automotive safety attention and demand, and constantly push the car industry for technical improvement and breakthrough in the field of automotive safety driving. In order to improve the car driving in the process of safety coefficient, based on automobile Electronic Stability control system (Electronic Stability Program, ESP) of the lateral control strategy, in automotive active steering control is established by car 2 degrees of freedom for the reference model of 8 degrees of freedom vehicle dynamics model is established of the rollover control strategy, mainly USES the change of steering wheel steering Angle, thus reduce the lateral acceleration of the car, improve vehicle rollover control. Secondly, based on automobile brake system in the process of driving and the change of suspension set up 10 degrees of freedom vehicle lateral dynamics model, application of vehicle dynamics and tire force coupling characteristics of vehicle rollover control strategy is put forward. Through differential braking torque regulation and timely match the semi-active suspension damping force, to achieve the effective control of vehicle rollover. Through to the steering system and brake system and suspension control research, greatly improve the stability in the process of car on the road. Key words: Control stability, suspension, steering control, vehicle, braking control.
汽车电子稳定系统(ESP)的原理分析 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS 和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化, 驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定 行驶路线或翻转趋势等危险状态。装置ESP 的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽 车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定 的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP 系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP 在ABS 和ASR 各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传 感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车 用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车 身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽 车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车
一、ESP 到底是什么? 在任何时候,只要驾驶状况变得紧急,电子稳定程序ESP都能保持车辆稳定,使主动行车安全大为改善。ESP整合了ABS和TCS的功能,并大大拓展了其功能范围。ESP还可降低各种场合下发生侧滑的危险,并能自动采取措施。通过有针对性地单独制动各个车轮,ESP使车辆保持稳定行驶,从而避免重大意外事故。 此主题相关图片如下: 二、ESP 有什么作用? 1、防止转向过度的后轮侧滑 ESP能够同时精确测量四个车轮的制动力。这样,在车辆不按转向意图行驶时,车辆可以被"拉"回到正确的行驶轨迹上。一辆具有转向不足特性的车,在左转向时,会在前轮上产生向外拉的效果;而通过ESP在左后轮上施加制动力,车辆将被拉回到正确的行驶轨道上来。在同样的弯道上,一辆具有转向过度特性的车会在后轮上产生向外拉的效果而跑离弯道;此时,通过在右前轮上施加制动力,ESP会相应产生一个具有稳定作用的顺时针扭矩,从而将车辆拉回到正确的行驶轨迹上来。 1、防止转向不足的前轮侧滑 ESP能够同时精确测量四个车轮的制动力。这样,在车辆不按转向意图行驶时,车辆可以被"拉"回到正确的行驶轨迹上。一辆具有转向不足特性的车,在左转向时,会在前轮上产生向外拉的效果;而通过ESP在左后轮上施加制动力,车辆将被拉回到正确的行驶轨道上来。在同样的弯道上,一辆具有转向过度特性的车会在后轮上产生向外拉的效果而跑离弯道;此时,通过在右前轮上施加制动力,ESP会相应产生一个具有稳定作用的顺时针扭矩,从而将车辆拉回到正确的行驶轨迹上来。
此主题相关图片如下: ESP 最主要的作用是在紧急情况下,可以帮助驾驶员保持对车辆的控制,从而避免重大意外事故。具体主要是通过防止车辆侧滑,在车辆和地面间还有附着力的前提下,保证车辆的方向操控性。通过对驾驶员的动作和路面情况的判断,对车辆的行驶状态进行及时的干预。(上图中红色的没有ESP系统) 一、ESP 的结构简介 带ECU的液压调节器分解图 此主题相关图片如下:
?汽车电子控制系统可以分为以下四个部分: 1)发动机和动力传动集中控制系统.包括发动机集中控制系统,自动化变速控制系统, 制动防抱死和牵引力控制系统等; 2)底盘综合控制和安全系统.包括车辆稳定控制系统,主动式车身姿态控制系统,巡航 控制系统,防撞预警系统,驾驶员智能支持系统等; 3)智能车身电子系统.自动调节座椅系统,智能前灯系统,汽车夜视系统,电子门锁与防 盗系统等; 4)通讯与信息/娱乐系统.包括智能汽车导航系统,语音识别系统,"ON STAR"系统(具 有自动呼救与查询等功能),汽车维修数据传输系统,汽车音响系统,实时交通信息咨询系统,动态车辆跟踪与管理系统,信息化服务系统(含网络等)等. 下面简单介绍一下目前较多见且较成熟的部分地区汽车电子控制装置. (一)发动机控制部分 1.电控点火装置(ESA) 该系统可使发动机在不同转速,进气量等因素下,在最佳点火提前角工况下工作,使发动机输出最大的功率和转矩,而将油耗和排放降低到最低限度.该系统分为开环和闭环两种控制.电控点火装置闭环控制系统通过爆震传感器进行反馈控制,其点火时刻的控制精度比开环高,但排气净化差些. 2.电控汽油喷射(EFI) 该系统根据各传感器输送来的信号,能有效控制混合气空燃比,使发动机在各种工况下空燃比达到较佳值,从而实现提高功率,降低油耗,减少排气污染等功效.该系统可分为开环和闭环两种控制.闭环控制是在开环控制的基础上,在一定条件下,由计算机根据氧传感器输出的含氧浓度信号修正燃油供给量,使混合气空燃比保持在理想状态下. 3.废气再循环控制(EGR) 该系统是将一部分排气中的废气引入进气侧的新鲜混合气中再次燃烧,以抑制发动机有害气体氮氧化合物的生成.该系统能根据发动机的工况适时地调节参与废气再循环的废气循环率,以减少排气中的有害气体氮氧化合物.它是一种排气净化的有效手段. 4.怠速控制(ISC) 该系统能根据发动机冷却液温度及其它有关参数,如空调开关信号,动力转向开关信号等,使发动机的怠速处于最佳状态. 除以上控制装置外,发动机部分的控制内容还有:发动机输出,冷却风扇,发动机排量,气门正时,二次空气喷射,发动机增压,油气蒸发控制及系统自诊断等. 另外,随着计算机技术的进一步发展,计算机将会在现代汽车上承担更重要的任务,如控制燃烧室的容积和形状,控制压缩比,检测汽车零件逐渐增加的机械磨损等. ?(二)底盘控制部分 1.电控自动变速器(ECT) 该装置有多种形式.它能根据发动机节气门开度和车速等行驶条件,按照换档特性精确地控制变速比,使汽车处于最佳档位.该装置具有提高传动效率,降低油耗,改善换档舒适性,提高汽车行驶平稳性以及延长变速器使用寿命等优点. 2.防滑控制系统 防滑控制包括制动防抱死(ABS),牵引控制(TCS),驱动防滑(ASR)和车辆横向稳定性控制系统(VSC).该系统可以提高制动效能,防止汽车在制动,起步,驱动和转弯时产生侧滑,是保证行车安全和防止事故发生的重要措施.
摘要 随着现代汽车技术的快速发展,人们在注重汽车的舒适性、可靠性、经济性的同时,对汽车的安全性更是提出了最高的要求。事实证明ESP电子稳定程序可以有效地降低重大交通事故发生率,从而挽救许许多多人的生命,为进一步加强汽车的乘坐安全性,全球道路专家一致认为ESP应该成为每一辆车的标准配置。汽车电子稳定程序(Electronic Stablity Program,简称ESP)是由奔驰汽车公司首先应用在它的A级车上的。ESP实际上是一种牵引力控制系统,与其他牵引力控制系统比较,ESP不但控制驱动轮,而且可控制从动轮。如后轮驱动汽车常出现的转向过多情况,此时后轮失控而甩尾,ESP便会刹慢外侧的前轮来稳定车子;在转向过少时,为了校正循迹方向,ESP则会刹慢内后轮,从而校正行驶方向。本文介绍了汽车电子稳定系统 ESP 的概念、结构组成、工作原理及发展趋势。 关键词:电子稳定程序;行驶稳定性;过度转向;不足转向
Abstract With the rapid development of modern automotive technology, people focus on vehicle comfort , reliability and economy at the same time , the safety of the car is made of the highest demands. ESP electronic stability program proved to be effective in reducing the incidence of major accidents , thereby saving the lives of many people , to further enhance the car 's ride safety experts agree that the world's roads each vehicle ESP should become the standard configuration . Automotive Electronic Stability Program (Electronic Stablity Program, referred to as ESP) was first applied by the Mercedes-Benz A-class in its car . ESP is actually a traction control system , traction control system compared with other , ESP not only control wheels , and can control the driven wheels . As often occurs in rear-wheel drive car oversteering situation , when the rear wheel drift out of control , ESP will slowly brake the outside front wheel to stabilize the car ; steering is too low, in order to correct tracking direction , ESP will brake slow rear wheel , thereby correcting the direction of travel. This paper introduces the concept of automotive electronic stability system ESP , structure , working principle and trends. Keywords: Electronic Stability Program; Driving stability; Oversteer; Understeer