
大学物理实验仿真系统使用指南
S tep1:在IE浏览器地址栏中输入:http://219.244.244.170:8012出现界面如图1 所示,点击安装。
图1
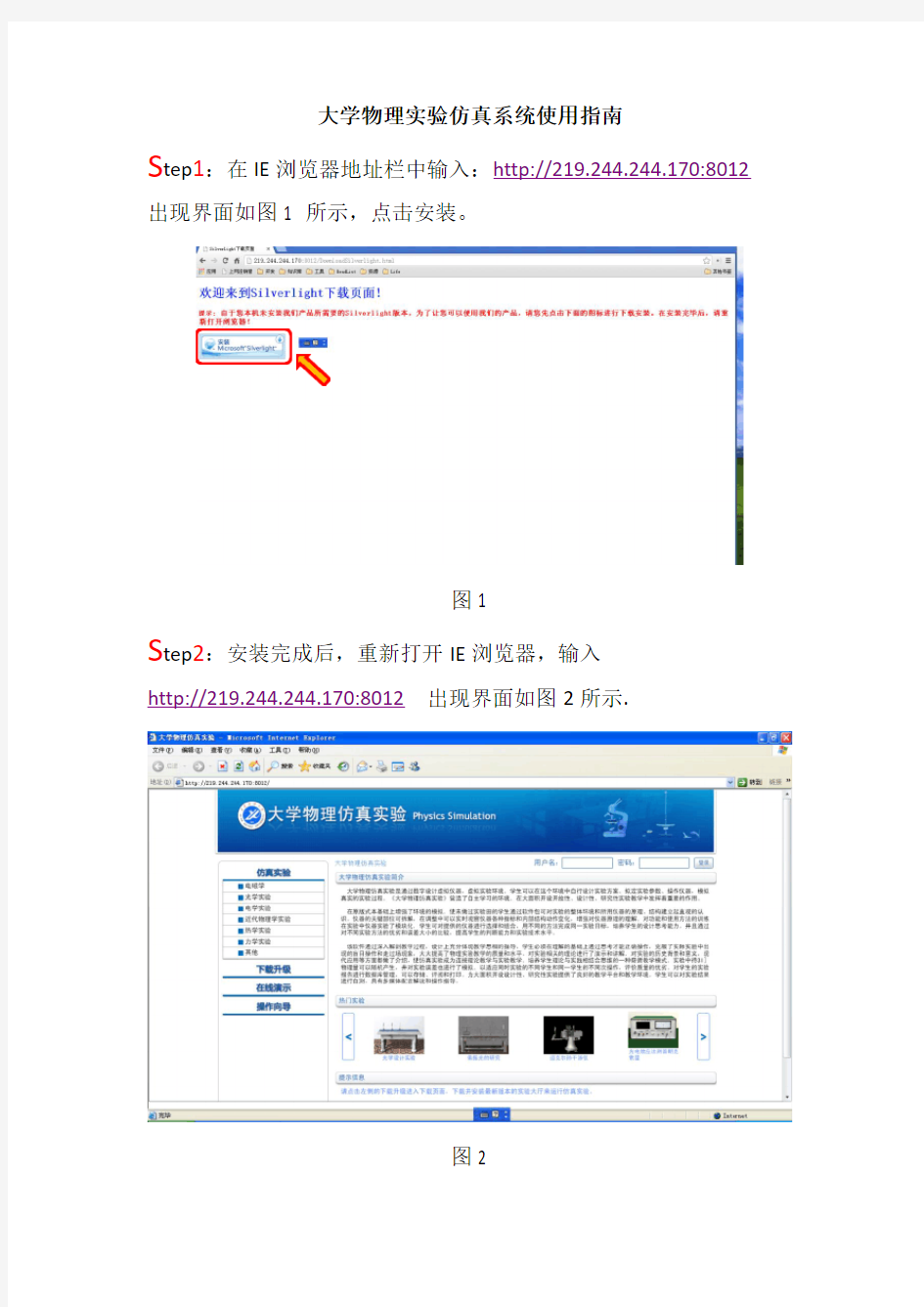
S tep2:安装完成后,重新打开IE浏览器,输入
http://219.244.244.170:8012出现界面如图2所示.
图2
S tep3:点击界面左边导航条的“下载升级”,如图3所示
图3
S tep4:显示界面如图4.
图4
S tep5:点击界面中部红色标注的文字链接“点击迅速下载”,如图5
所示
图5 S tep6:出现界面如图6所示。
图6
S tep7:在弹出的对话框中点击”保存“(如图7所示),并自行安装此程序。
图7
S tep8:安装完成后,在此界面中的实验大厅下载表中,点击“下载“(如图8所示),此时下载更新后的程序
图8
S tep9:出现界面如图9所示。
图9
S tep10:出现界面如图9所示。在弹出的对话框中点击”保存“(如图7所示),并自行安装此程序。
图10
S tep 11:程序安装完成后,在桌面上会有一个图标,如图11所示。
图11
S tep 12:双击此图标,进入“物理实验大厅“登陆界面,如图12所示。
图
12
此时所有程序已经安装完成。
S tep13:在登陆界面中,点击“网络设置“如图13所示。
图13
S tep14:进入网络设置的界面,服务器地址:219.244.244.170;端口号:8012;输入完成后点击“保存设置“
图14
S tep15:进入仿真实验平台,任意打开界面左边导航栏中的任一个实验类别,(如图15中点击“电学实验“),会出现这个实验类中所有的实验项目(如图15所示)。
图15
S tep16:双击某个实验项目,就可以下载此实验。已经下载的实验右侧没有出现(双击下载),如图16表示示波器实验已经下载。
图16
S tep17:单击已经下载的实验项目,便可以看到实验的相关内容(如图17a),双击已经下载的实验项目,便可以操作此实验(如图17b)。
单击
图17a
双击
图17b
51仿真器使用说明 初学51单片机或是业余玩玩单片机开发,每次总要不断的调试程序,如没有仿真器又不喜欢用软件仿真,那只有每次把编译好的程序烧录到芯片上,然后在应用电路或实验板上观察程序运行的结果,对于一些小程序这样的做好也可以很快找到程序上的错误,但是程序稍大,变量也会变的很多,系统调试就极为复杂,此时就需要有一台仿真器。一台好的仿真器非常贵,这里介绍这种自制的51芯片仿真器。 这个仿真器的仿真CPU是使用SST公司的SST89C516RD2。 1.制作带串口的的最小应用板 无论是EasyIAP还是仿真器,都需要用串行口使SST89C58芯片和PC上位机进行通讯传输数据,因此先要设计RS232/TTL转换电路。由于现在的电脑多取消了普通串口,因此我们此处设计了一个usb转TTL的串口接口电路,使用的接口芯片是PL2303。 2.通过编程器烧写仿真监控程序 接下来需要把仿真CPU的HEX文件烧到SST89C58里面,再把它插到上面的最小系统电路中就可以了。因为SST89C58有两个程序存储区,在这里要注意的是在烧写时就把仿真监控程序烧到SST89C58的第二个存储区也就是的RB1。烧写时要求用支持SST89C58的编程器。 3. 仿真器原理简介 SST的MCU SoftICE通过PC的一个COM口与KEIL uVision2 Debugger 通讯它可以实时地调试目标程序,因此提供使用SST单片机的工程师简单有效和容易使用在板上调试程序。尽管小而紧凑,SoftICE却提供高级仿真器的大部分功能与KEIL uVision2 Debugger 一起使用。 SoftICE提供以下特性: 源代码调试支持汇编语言和C51高级语言 单步执行STEP和STEP OVER 断点调试做多到10个固定和1个临时断点 全速运行 显示修改变量 读/写数据存储器 读/写代码存储器 读/写SFR特殊功能寄存器 读/写P0-P3端口 下载INTEL HEX文件 对8051程序存储区的反汇编 在线汇编 SST MCU产品特有的IAP功能In Application Programming SoftICE 用到的MCU 硬件资源 SST的SoftICE用到的MCU硬件资源如下
大学物理学实验指导书 大学物理实验 力学部分 实验一长度与体积的测量 实验类型:验证 实验类别:专业主干课 实验学时:2 所属课程:大学物理
所涉及的课程和知识点:误差原理有效数字 一、实验目的 通过本实验的学习,使学生掌握测长度的几种常用仪器的使用,并会正确读数。练习作好记录和误差计算。 二、实验要求 (1)分别用游标卡尺、螺旋测微计测金属圆筒、小钢球的内外径及高度,并求体积。(2)练习多次等精度测量误差的处理方法。 三、实验仪器设备及材料 游标卡尺,螺旋测微计,金属圆柱体,小钢球,铜丝 四、实验方案 1、用游标卡尺测量并计算所给样品的体积。 2、分别用千分尺和读数显微镜测量所给金属丝的直径。 数据处理 注意:有效数字的读取和运用,自拟表格,按有关规则进行数据处理。 描述实验过程(步骤)以及安全注意事项等,设计性实验由学生自行设计实验方案。 五、考核形式 实际操作过程实验报告 六、实验报告 实验原理,实验步骤,实验数据处理,误差分析和处理。 对实验中的特殊现象、实验操作的成败、实验的关键点等内容进行整理、解释、分析总结,回答思考题,提出实验结论或提出自己的看法等。 七、思考题 1、游标卡尺测量长度时如何读数 游标本身有没有估读数 2、千分尺以毫米为单位可估读到哪一位初读数的正负如何判断 待测长度如何确定 实验二单摆 实验类型:设计 实验类别:专业主干课 实验学时:2 所属课程:大学物理 所涉及的课程和知识点:力学单摆周期公式 一、实验目的 通过本实验的学习,使学生掌握使用停表和米尺,测准单摆的周期和摆长。利用单摆周期公式求当地的重力加速度
二、实验要求 (1)测摆长为1m时的周期求g值。 (2)改变摆长,每次减少10cm,测相应周期T,作T—L图,验证单摆周期公式。 三、实验仪器设备及材料 单摆、米尺、游标卡尺、停表。 四、实验方案 利用试验台上所给的设备及材料,自己制作一个单摆,然后设计实验步骤测出单摆的周期,再根据单摆的周期公式计算当地的重力加速速。 改变摆长,讨论对实验结果的影响并分析误差产生的原因 五、考核形式 实际操作过程实验报告 六、实验报告 实验原理,实验步骤,实验数据处理,误差分析和处理。 对实验中的特殊现象、实验操作的成败、实验的关键点等内容进行整理、解释、分析总结,回答思考题,提出实验结论或提出自己的看法等。 七、思考题 1、为什么测量周期不宜直接测量摆球往返一次摆动的周期试从误差分析来说明。 2、在室内天棚上挂一单摆,摆长很长,你设法用简单的工具测出摆长不许直接测量摆长。 实验三牛顿第二定律的验证 实验类型:验证 实验类别:专业主干课 实验学时:2 所属课程:大学物理 所涉及的课程和知识点:力学牛顿第二定律摩擦 一、实验目的 通过本实验的学习,使学生掌握气垫导轨的使用,使学生通过在气垫导轨上验证牛顿第二定律,更深刻的理解牛顿第二定律的物理本质。 二、实验要求 验证当m一定时,a∝F,当F一定时,a∝1/m。 三、实验仪器设备及材料 气垫导轨,数字毫秒计,光电门,气源 四、实验方案 1、调整气垫导轨水平。 在导轨的端部小心安装好滑轮,使其转动自如,细心调整好导轨的水平。
系统建模与仿真习题二 1. 考虑如图所示的典型反馈控制系统框图 (1)假设各个子传递函数模型为 66.031.05 .02)(232++-+=s s s s s G ,s s s G c 610)(+=,2 1)(+=s s H 分别用feedback ()函数以及G*Gc/(1+G*Gc*H)(要最小实现)方法求该系统的传递函数模型。 (2) 假设系统的受控对象模型为s e s s s G 23 )1(12 )(-+=,控制器模型为 s s s G c 32)(+=,并假设系统是单位负反馈,分别用feedback ()函数以及G*Gc/(1+G*Gc*H)(要最小实现)方法能求出该系统的传递函数模型?如果不能,请近似该模型。 2. 假定系统为: )(0001)(111000100001024269)(t u t x t x ????? ???????+????????????----= [])(2110)(t x t y = 请检查该系统是否为最小实现,如果不是最小实现,请从传递函数的角度解释该模型为何不是最小实现,并求其最小实现。 3. 双输入双输出系统的状态方程:
)(20201000)()(20224264)(75.025.075.125 .1125.15.025.025.025.125.425.25.025.1525.2)(t x t y t u t x t x ??????=????? ???????+????????????------------= (1)试将该模型输入到MATLAB 空间,并求出该模型相应的传递函数矩阵。 (2)将该状态空间模型转化为零极点增益模型,确定该系统是否为最小实现模型。如果不是,请将该模型的传递函数实现最小实现。 (3)若选择采样周期为s T 1.0=,求出离散后的状态方程模型和传递函数模型。 (4)对离散的状态空间模型进行连续变化,测试一下能否变回到原来的系统。 4. 假设系统的传递函数模型为: 222 )(2+++=s s s s G 系统状态的初始值为?? ????-21,假设系统的输入为t e t u 2)(-=。 (1)将该传递函数模型转化为状态空间模型。 (2)利用公式 ?--+=t t t A t t A d Bu e t x e t x 0 0)()()()(0)(τττ求解],0[t 的状态以及系统输出的解析解。 (3)根据上述的解析解作出s ]10,0[时间区间的状态以及系统输出曲线。 (4)采用lsim 函数方法直接作出s ]10,0[时间区间的状态以及系统输出曲线,并与(3)的结果作比较。 5. 已知矩阵 ???? ??????----=212332110A (1)取1:1.0:0=t ,利用expm(At)函数绘制求A 的状态转移矩阵,看运行的速度如何? (2)采用以下程序绘制A 的状态转移矩阵的曲线,看运行的速度如何? clc;clear; A=[0 1 -1;-2 -3 3;2 1 -2]; t=0:0.1:2; Nt=length(t);
实验一霍尔效应及其应用 【预习思考题】 1.列出计算霍尔系数、载流子浓度n、电导率σ及迁移率μ的计算公式,并注明单位。 霍尔系数,载流子浓度,电导率,迁移率。 2.如已知霍尔样品的工作电流及磁感应强度B的方向,如何判断样品的导电类型? 以根据右手螺旋定则,从工作电流旋到磁感应强度B确定的方向为正向,若测得的霍尔电压为正,则样品为P型,反之则为N型。 3.本实验为什么要用3个换向开关? 为了在测量时消除一些霍尔效应的副效应的影响,需要在测量时改变工作电 流及磁感应强度B的方向,因此就需要2个换向开关;除了测量霍尔电压,还要测量A、C间的电位差,这是两个不同的测量位置,又需要1个换向开关。总之,一共需要3个换向开关。 【分析讨论题】 1.若磁感应强度B和霍尔器件平面不完全正交,按式(5.2-5)测出的霍尔系数比实际值大还是小?要准确测定值应怎样进行? 若磁感应强度B和霍尔器件平面不完全正交,则测出的霍尔系数比实际值偏小。要想准确测定,就需要保证磁感应强度B和霍尔器件平面完全正交,或者设法测量出磁感应强度B和霍尔器件平面的夹角。 2.若已知霍尔器件的性能参数,采用霍尔效应法测量一个未知磁场时,测量误差有哪些来源? 误差来源有:测量工作电流的电流表的测量误差,测量霍尔器件厚度d的长度测量仪器的测量误差,测量霍尔电压的电压表的测量误差,磁场方向与霍尔器件平面的夹角影响等。 实验二声速的测量 【预习思考题】 1. 如何调节和判断测量系统是否处于共振状态?为什么要在系统处于共振的条件下进行声速测定? 答:缓慢调节声速测试仪信号源面板上的“信号频率”旋钮,使交流毫伏表指针指示达到最大(或晶体管电压表的示值达到最大),此时系统处于共振状态,显示共振发生的信号指示灯亮,信号源面板上频率显示窗口显示共振频率。在进行声速测定时需要测定驻波波节的位置,当发射换能器S1处于共振状态时,发射的超声波能量最大。若在这样一个最佳状态移动S1至每一个波节处,媒质压缩形变最大,则产生的声压最大,接收换能器S2接收到的声压为最大,转变成电信号,晶体管电压表会显示出最大值。由数显表头读出每一个电压最大值时的位置,即对应的波节位置。因此在系统处于共振的条件下进行声速测定,可以容易和准确地测定波节的位置,提高测量的准确度。 2. 压电陶瓷超声换能器是怎样实现机械信号和电信号之间的相互转换的? 答:压电陶瓷超声换能器的重要组成部分是压电陶瓷环。压电陶瓷环由多晶结构的压电材料制成。这种材料在受到机械应力,发生机械形变时,会发生极化,同时在极化方向产生电场,这种特性称为压电效应。反之,如果在压电材料上加交
科技学院 综合实验报告 ( -- 第1 学期) 名称: 控制系统综合实验 题目: 水位控制系统综合实验 院系: 动力工程系 班级: 自动化09K1 学号: 09191 116 学生姓名: 秦术员 指导教师: 平玉环 设计周数: 1周 成绩: 日期: 1月7日
《控制系统》综合实验 任务书 一、目的与要求 本综合实验是自动化专业的实践环节。经过本实践环节, 使学生对实际控制系统的结构、系统中各环节的关系、数字控制器的应用和控制系统的整定等建立起完整的概念。培养学生利用所学理论知识分析、解决实际问题的能力。 1. 了解单容水箱水位控制系统的实际结构及各环节之间的关 系。 2. 学会数字控制器组态方法。 3. 掌握控制系统整定方法, 熟悉工程整定的全部内容。 二、主要内容 1.熟悉紧凑型过程控制系统, 并将系统调整为水位控制状态。 2.对数字控制器组态。 3.求取对象动态特性。 4.计算调节器参数。 5.调节器参数整定。 6.做扰动实验, 验证整定结果。 7.写出实验报告。 三、进度计划
四、实验成果要求 完成实验报告, 实验报告包括: 1.实验目的 2.实验设备 3.实验内容, 必须写出参数整定过程, 并分析控制器各参数的作用, 总结出一般工程整定的步骤。 4.实验总结, 此次实验的收获。 以上内容以打印报告形式提交。 五、考核方式 根据实验时的表现、及实验报告确定成绩。 成绩评分为经过以及不经过。 学生姓名: 秦术员 指导教师: 平玉环 1月7日
一、综合实验的目的与要求 本综合实验是自动化专业的实践环节。经过本实践环节, 使学生对实际控制系统的结构、系统中各环节的关系、数字控制器的应用和控制系统的整定等建立起完整的概念。培养学生利用所学理论知识分析、解决实际问题的能力。 1. 了解单容水箱水位控制系统的实际结构及各环节之间的关 系。 2. 学会数字控制器组态方法。 3. 掌握控制系统整定方法, 熟悉工程整定的全部内容。 二、实验正文 1. 实验设备 紧凑型过程控制系统; 上位机 2. 液位控制系统 2.1 液位控制系统流程图, 如图1
1.信息时代认识世界(科学研究)的三种方法是:理论研究、(_实验研究_)、(__ 仿真___)。 2.根据系统状态随时间变化是连续性还是间断性的,可将系统划分为(_连续系统_)、 (__离散系统__)。 3.系统仿真中的三个基本概念是系统、(__模型_)、仿真。 4.拟对某系统进行研究,首先要对系统作出明确的描述,即确定系统各个要素:实体、 属性、活动、(__状态_)、(_事件___)。 ?阶段性知识测试 5.系统仿真有三个基本的活动,即系统建模、仿真建模和(__仿真实验__),联系这 三个活动的是系统仿真的三要素,即系统、模型和计算机(硬件和软件)。 6.系统仿真的一般步骤是:(1)调研系统,明确问题、(2)(___设立目标,收集数据 __)、(3)建立仿真模型、(4)编制程序、(5)运行模型,计算结果、(6)(_统计分析,进行决策__) ?阶段性知识测试 7.仿真软件发展经历了四个阶段(1)高级程序语言阶段;(2)仿真程序包、初级仿 真语言阶段;(3)商业化仿真语言阶段;(4) (_一体化建模与仿真环境_)阶段。 8.常用的仿真软件有Arena、Automod、MATLAB、Promodel、(__WITNESS______)、 (______FLEXSIM___)。 9.求解简单系统问题的“原始”方法是(___解析解决____),借助(___实验__)可大大 提高该方法的效率和精度。 ?阶段性知识测试 10.排队系统可简化表示为A/B/C/D/E。其中A为到达模式;B为(服务模式)、C为服 务台数量、D为系统容量;E为排队规则。 11.常见的排队规则有:先到先服务、后到后服务、优先级服务、最短处理时间优先服 务、随机服务等。请以连线方式将下列排队规则名称的中英文对照起来。 先进先出FIFO 后进先出LIFO 随机服务SIRO 最短处理时间优先SPT 优先级服务PR ?阶段性知识测试 12.模型中,习惯称实体为成分。成分可分为主动成分和被动成分。请问排队系统中的 随机到达的顾客属于(主动)成分(主动/被动)。 13.事件是改变系统状态的瞬间变化的事情。一般指活动的开始和结束。事件可分为必 然事件(主要)、条件事件(次要)、系统事件。其中(______)一般不出现在将来事件表中(FEL)。 14.活动是具有指定长度的持续时间,其开始时间是确定。排队系统主要活动有 (_______)和服务活动。 ?阶段性知识测试 15.仿真时钟表示仿真时间的变量。Witness仿真系统中仿真钟用系统变量(TIME)表 示。 仿真策略,也称仿真算法。离散事件系统适用的仿真策略有(_事件调度法_)、活动扫描法、进程交互法、三阶段法等。 16.建立输入数据模型需要4个步骤:(1)从现实系统收集数据;(2)(_确定输入数据
第一章Xlink仿真器特性描述 ?硬件特性 ?USB 2.0全速接口 ?JTAG / IEEE1149.1标准 ?可编程JTAG时钟,最高可达6Mbits / sec ?JTAG信号电平自适应支持,1.2V ~ 5V ?MULI-ICE 20-PIN标准调试接口 ?USB串口扩展,RS232标准,最高支持921600波特率 ?铝合金外壳,小巧便携 ?软件特性 ?支持在线调试多种CPU内核 ●arm720t ●arm7tdmi ●arm920t ●arm9tdmi ●arm926ejs ●arm966 ●avr ●arm11 ●cortex_m3 ●cortex_m8 ●xscale ?支持GDB调试协议 ?支持单步、跳转、全速、条件断点、变量显示、堆栈跟踪、内存查看等?支持在线烧写NOR Flash、NAND Flash及某些CPU的片内ROM ?支持低阶命令行功能,使用telnet方式登陆 ?支持Eclipse集成开发环境
第二章安装Xlink USB JTAG服务程序 双击xlink-usb-jtag-setup-0.4.0.exe,进入安装向导 点击下一步 目标文件夹路径不能带有空格符号,建议安装在C盘根目录下。
点击安装,进入安装过程 点击完成按钮,结束安装向导 备注:Xlink USB JTAG驱动程序目录为安装目录下的driver目录
第三章安装Xlink USB JTAG驱动程序 将Xlink仿真器插入USB口,在右下角会出现设备插入提示 如未自动弹出驱动安装界面,请打开设备管理器,在Xlink USB Jtag上右键,并点击“更新驱动程序软件” 选择“浏览计算机以查找驱动程序软件”
1.1 静电场 实验内容 图示静电场的基本性质: 同心球壳电场及电势分布图。 实验设置 有两个均匀带电的金属同心球壳配置如图。内球壳(厚度不计)半径为R 1=5.0 cm ,带电荷 q 1 = 0.6?10-8 C ;外球壳半径R 2 = 7.5 cm ,外半径R 3 = 9.0 cm ,所带总电荷q 2 = - 2.0?10-8 C 。 实验任务 画出该同心球壳的电场及电势分布。 实验步骤及方法 基本原理:根据高斯定理推导出电场及电势的 分布公式;利用数据分析软件,如Microsoft Excel 绘制电场及电势的分布图。 在如图所示的带电体中,因内球壳带电q 1,由于静电感应,外球壳的内表面上将均匀地分布电荷-q 1;根据电荷平衡原理,外球壳的外表面上所带电荷除了原来的q2外,还因为内表面感应了-q 1而生成+q 1,所以外球壳的外表面上将均匀分布电荷q 1+q 2。 在推导电场和电势分布公式时,须根据r 的变化范围分别讨论r < R 1、R 1 < r < R 2、R 2 < r < R 3、r > R 3几种情况。 场强分布: 当r < R 1时, 001=?=???E dS E S 当R 1 < r < R 2时, ?= ???0 1 εq dS E S 2 1 0241 r q E επ= 当R 2 < r < R 3时, 00 3=?=???E dS E S 当r > R 3时, 1
2 210 40 2 141r q q E q q dS E S += ? += ??? επε 电势分布: 根据电势的定义,可以求得电势的分布。 当r < R 1时, 3 2 10210110143211414141 3 3 2 21 1R q q R q R q U dr E dr E dr E dr E dr E U R R R R R R r r ++ -=?+?+?+?=?=?????∞ ∞ επεπεπ 当R 1 < r < R 2时, 3 2 102101014321414141 3 3 2 2R q q R q r q U dr E dr E dr E dr E U R R R R r r ++ -=?+?+?=?=????∞ ∞ επεπεπ 当R 2 < r < R 3时, 3 2 10143141 3 3 R q q U dr E dr E dr E U R R r r += ?+?=?=???∞ ∞ επ 当r > R 3时, r q q U dr E dr E U r r 2 1014141 += ?=?=??∞ ∞επ 至此,可以用MS Excel 来绘制电场及电势分布图。方法如下: 打开Excel 后会有一个默认的表格出现(如下图) 在A1、A2、A3单元格内分别输入“R1=”、“R2=”、“R3=”;在B1、B2、B3单元格内分别输入R1、R2、R3的数值。
系统建模与仿真习题三及答案 1.已知系统 )24(32)(21+++=s s s s s G 、2 103)(2+-=s s s G 求G 1(s)和G 2(s)分别进行串联、并联和反馈连接后的系统模型。 解: clc;clear; num1=[2 3]; den1=[1 4 2 0]; num2=[1 -3]; den2=[10 2]; G1=tf(num1,den1); G2=tf(num2,den2); Gs1=series(G1,G2) Gp1=parallel(G1,G2) Gf=feedback(G1,G2) 结果: Transfer function: 2 s^2 - 3 s - 9 ------------------------------ 10 s^4 + 42 s^3 + 28 s^2 + 4 s Transfer function: s^4 + s^3 + 10 s^2 + 28 s + 6 ------------------------------ 10 s^4 + 42 s^3 + 28 s^2 + 4 s Transfer function: 20 s^2 + 34 s + 6 -------------------------------- 10 s^4 + 42 s^3 + 30 s^2 + s – 9 2.某双闭环直流电动机控制系统如图所示:
利用feedback( )函数求系统的总模型。 解: 模型等价为: 编写程序: clc;clear; s=tf('s'); G1=1/(0.01*s+1); G2=(0.17*s+1)/(0.085*s); G3=G1; G4=(0.15*s+1)/(0.051*s); G5=70/(0.0067*s+1); G6=0.21/(0.15*s+1); G7=(s+2)/s; G8=0.1*G1; G9=0.0044/(0.01*s+1); sys1=feedback(G6*G7,0.212); sys2=feedback(sys1*G4*G5,G8*inv(G7)); sys=G1*feedback(sys2*G2*G3,G9) 结果: Transfer function:
普中51仿真器下载操作说明 首先安装普中51仿真器的驱动:(安装时,用管理员身份运行,最好要把360 等杀蠹软件先关掉成功后再打开) 双击set up图标 H3 setup^ESexe 墉setup_x54ieMe 对应什么电脑系统就装什么驱动,有win32,win64; 具体安装步骤如下: 选择路径中,选择与你keil安装的路径一样就行了(这里我们把KEIL1安装在E 盘)
一旦“安装”由灰色变成黑色,点击它就行了 最后点击确定即可。 如果电脑XP系统出现这种情况: 没有癖J DIFWI. dll J因]此这个应用程序未能启动-重新安装应用程序可能会修复此问题, 就把那个驱动安装文件中的这个 函叩Ldll 2015718 口炀应用程序扩星M12KE 复制到WINDOW SYSTEM32面,
本文这里用的是MDK Keil4.74版本,在“Debug”硬件仿真设置中找到PZ51 Tracker Driver就行了,如果没有找到就说明KEIL版本不合适,需要安装新版本的keil软件。 仿真步骤:打开一个能够正常编译通过的工程
蜉虻淄更斗 由 * 官盅主山#赛M 丈兰*机何-奇21、RMM 宰口丈虹 发零养号取」o.i-^p-oj - p7i &ior4 EH F f^it V PTW Piajrrt Flash Ochug Rtripheraik T DA J I 5VCS ^X'iinaguw Hf|p j 「一』割.一 二 I I F ■株%|毒竺帕" 乏 _______________________________________________ 日9 ¥ 姓 专笆目莎暨| %" | Tflrffrtt 卜|卷&蓉幸朗 由可记 ■ @ 固心tu □ REG51,M 国 mmWL ■ x 1、进入KEIL 硬件仿真设置 j_J F arget 1 E-^ Saurce Group 1 为 SIARIJPA5_ S -[£] Eiiin.c 孟J&EG5LT □ P .右 F U 7 I 顷- Build Output 4-6 47 — 4S void UsartC&nf iomira^ian (I- 49 F 50 SCOH-gS “讦旨布丁作方于1 51 1MW==10SMC I F 厂云也汁婚程工涪万式£ 5; PC03T-3KE 2-7 打波特军H 倍 4^3 rHi=cxFa : ”奸救舞戒培宅日宣.往急蓝才玉是弟况的 S4 TLl*i :Xr*2 SS 〃 E£=Lr 〃打开接收中新 5< /< El=l ; 〃打开总中酎 57 TR1-1; 〃位开甘钦对 5? S9 J *.此入出一 矗- W2J 薪祐- £? L £T void Dela^lOcis ( -iLSlzned int cf F/1M 室 O LIS ce R ( €9 un#igH/di ch4)x A f b ;
磁性物理实验 讲义 磁性物理课程组编写 电子科技大学微电子与固体电子学院 二O一二年九月
目录 一、起始磁导率温度特性测量和居里温度测试计算分析 (1) 二、电阻率测试及磁损耗响应特性分析 (3) 三、磁致伸缩系数测量与分析 (6) 四、磁化强度测量与分析 (9) 五、磁滞回线和饱和磁感应强度测量 (11) 六、磁畴结构分析表征 (12)
一、起始磁导率温度特性测量和居里温度测试计算分析 (一) 、实验目的: 了解磁性材料的起始磁导率的测量原理,学会测量材料的起始磁导率,并能够从自发磁化起源机制来分析温度和离子占位对材料起始磁导率和磁化强度的影响。 (二)、实验原理及方法: 一个被磁化的环型试样,当径向宽度比较大时,磁通将集中在内半径附近的区域分布较密,而在外半径附近处,磁通密度较小,因此,实际磁路的有效截面积要小于环型试样的实际截面。为了使环型试样的磁路计算更符合实际情况,引入有效尺寸参数。有效尺寸参数为:有效平均半径r e ,有效磁路长度l e ,有效横截面积A e ,有效体积V e 。矩形截面的环型试样及其有效尺寸参数计算公式如下。 ???? ??-=21 1 211ln r r r r r e (1) ???? ??-=21 12 11ln 2r r r r l e π (2) ???? ??-=2112 211ln r r r r h A e (3) e e e l A V = (4) 其中:r 1为环型磁芯的内半径,r 2为环型磁芯的外半径,h 为磁芯高度。 利用磁芯的有效尺寸可以提高测量的精确性,尤其是试样尺寸不能满足均匀磁化条件时,应用等效尺寸参数计算磁性参数更合乎实际结果。材料的起始磁导率(i μ)可通过对环型磁心施加线圈后测量其电感量(L )而计算得到。计算公式如式(5)所示。 2 0i e e A N L l μμ= (5)
物流系统建模与仿真考前复习题 1、名词解释(5*4分) (1)系统:系统是由若干可以相互区别、相互联系而又相互作用的要素所组成,在一定的阶层结构形成中分布,在给定的环境约束下,为达到整体的目的而存在的有机集合体。 (2)物流系统模型:物流系统模型是对物流系统特征要素、有关信息和变化规律的一种抽象表达,描述了系统各要素之间的相互关系、系统与环境之间的相互作用,以反映系统的某些本质。 (3)系统仿真:应用数学模型、相应的实用模型的装置、计算机系统、部分实物的仿真系统,对某一给定系统进行数学模拟、半实物模拟、实物模拟,以便分析、设计、研究这种给定系统;或者利用这种仿真训练给定系统的专业人员。 (4)离散事件系统:指系统状态在某些随机时间点上发生离散变化的系统。离散事件动态系统,本质上属于人造系统 (4)实体:实体是描述系统的三个基本要素(实体、属性、活动)之一。在离散事件系统中的实体可分为两大类:临时实体及永久实体。在系统中只存在一段时间的实体叫临时实体。这类实体由系统外部到达系统,通过系统,最终离开系统。临时实体按一定规律不断地到达(产生),在永久实体作用下通过系统,最后离开系统,整个系统呈现出动态过程。 (5)事件:事件就是引起系统状态发生变化的行为。从某种意义上说,这类系统是由
事件来驱动的。在一个系统中,往往有许多类事件,而事件的发生一般与某一类实体相联系,某一类事件的发生还可能会引起别的事件发生,或者是另一类事件发生的条件等,为了实现对系统中的事件进行管理,仿真模型中必须建立事件表,表中记录每一发生了的或将要发生的事件类型和发生时问,以及与该事件相联的实体的有关属性等。 (6)仿真时钟:仿真钟用于表示仿真时间的变化。离散事件动态系统的状态是在离散时间点上发生变化的,并且由于引起状态变化的事件发生时间的随机性,仿真钟的推进步长是随机的。如果两个相邻发生的事件之间系统状态不发生任何变化,则仿真钟可以跨过这些“不活动”周期。从一个事件发生时刻推进到下一事件发生时刻,仿真钟的推进呈跳跃性,推进速度具有随机性。 (7)事件调度法:仿真模型中的时间控制部件用于控制仿真钟的推进。在事件调度法中,事件表按事件发生时间先后顺序安排事件。时间控制部件始终从事件表中选择具有最早发生时问的事件记录,然后将仿真钟修改到该事件发生时刻。对每一类事件,仿真模型有相应的事件子程序。每一个事件记录包含该事件的若干个属性,其中事件类型是必不可少的,要根据事件类型调用相应的事件子程序。在事件子程序中,处理该事件发生时系统状态的变化,进行用户所需要的统计计算;如果是条件事件,则应首先进行条件测试,以确定该事件是否确能发生。如果条件不满足,则推迟或取消该事件。该事件子程序处理完后返回时问控制部件。 (8)进程交互法:一个进程包含若干个有序事件及有序活动。进程交互法采用进程描述系统,它将模型中的主动成分所发生的事件及活动按时间顺序进行组合,从而形成进程表,一个成分一旦进入进程,它将完成该进程的全部活动。 (9)连接:通过对象之间的连接定义仿真模型的流程,模型中对象之间是通过端口来
普中A R M仿真器使用 说明书 -CAL-FENGHAI.-(YICAI)-Company One1
普中ARM仿真器下载操作说明 本文这里用的是MDK 版本,如果在硬件仿真设置中找不到CMSIS-DAP请更换版本,版本过低的KEIL不会显示CMSIS-DAP-Debugger。 注意:ARM 仿真器在WIN10 上当仿真器插到电脑上时,随电脑开机重启使用之前要把USB 拔了重插才能识别 步骤:打开一个能够正常编译通过的工程
1、进入KEIL硬件仿真设置 2、设置好硬件仿真后我们点Settings进入更深入的设置,请按照我这个面板这样设置。 (PS:这里我们也可以选择SW模式,把SWJ勾上Port选择SW就是SW模式了)
3、设置好debug页面。我们点击Flash Download进入下载设置把Rese and Run 勾上
4、点击add我们就来到了这一个页面,找到STM32F10x High-density Flash 512k 选中点add添加就回到第4步页面,有显示STM32F10x High-density 512k 点ok 完成设置。 6、完成以上设置后我们点Utilities页面,这里也选择CMSIS-DAP选择好之后我们点ok完成设置(ps:如果这个界面没有Use Target for flash Programming选择CMSIS-DAP就忽略这一项)
7、(keil下载)设置好之后我们编译程序没问题我们点Download进行下载提示Verify OK就说明已经下载成功了 8、(在线仿真调试)我们可以直接在keil里面调试程序,点工具栏的start debug 开始调试,如果退出也是点这个按钮
学习指南 1、物理实验课的教学目的 大学物理实验教学目的与中学阶段的物理实验教学有着本质的不同。“大学物理实验”是一门独立的基础课程,它不是“大学物理学”的分支或组成部分。虽然物理实验必须以物理学的理论为基础,运用物理学的原理进行实验或研究,但是“大学物理实验”又独立于“大学物理学”,它不是以验证物理定律、加强理解物理规律为主要目的的,分散的力、热、电、磁、光实验的堆切,而是以物理实验的基本技术或基本物理量的测量方法为主线,再贯穿以现代误差理论,现代物理实验仪器设备、器件的原理、使用方法,构建成一个完整的,但又不断发展的课程体系框架。其教学目的如下: (1)掌握基本物理量的各种测量方法,学会分析测量的误差,学会基本的实验数据处理方法,能正确的表达测量结果,并对测量结果进行正确的评价(测量不确定度)。 (2)掌握物理实验的基本知识、基本技能,常用实验仪器设备、器件的原理及使用方法,并能正确运用物理学理论指导实验。 (3)培养、提高基本实验能力,并进一步培养创新能力。基本实验能力是指能顺利完成某种实验活动(科研实验或教学实验)的各种相关能力的总和,主要包括: 观察思维能力──在实验中通过观察分析实验现象,并得出正确规
律的能力。 使用仪器能力──能借助教材或仪器使用说明书掌握仪器的调整和使用方法的能力。 故障分析能力──对实验中出现的异常现象能正确找出原因并排除故障的能力。 数据处理能力──能正确记录、处理实验数据,正确分析实验误差的能力。 报告写作能力──能撰写规范、合格的实验报告的能力。 初步实验设计能力──能根据课题要求,确定实验方案和条件,合理选择实验仪器的能力。 (4)培养从事科学实验的素质。包括理论联系实际和实事求是的科学作风;严肃认真的工作态度;吃苦耐劳、勇于创新的精神;遵守操作规程,爱护公共财物的优良品德;以及团结协作、共同探索的精神。 2、大学物理实验课的基本程序 实验课与理论课不同,它的特点是同学们在教师的指导下自己动手,独立完成实验任务,通常每个实验的学习都要经历三个阶段。 (1)实验的准备 实验前必须认真阅读讲义,做好必要的预习,才能按质按量按时完成实验。同时,预习也是培养阅读能力的学习环节。预习时要写预习报告,预习报告包括以下内容:
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
上海海洋大学试卷 姓名:学号:专业班名: 一.简述题(共40分) 1.什么是事件?在单通道排队系统中,哪两个典型事件影响系统的状态?这两个典型事件分别发生时,可能会改变系统哪些状态?(5分) 事件是指引起系统状态发生变化的行为或者事情 在单通道派对系统中的典型事件是:顾客到达和服务结束 顾客到达发生,系统可能会由闲开始变为忙,可能引起队长发生变化 服务结束,系统的状态可能有忙变为闲,可能引起队长发生变化 2.分析FMS(柔性制造系统)中的实体、状态、事件和活动。要求每一项写出2个。(8分) 实体:机床、工件 状态:空闲、加工 事件:工件到达、加工结束 活动:工件到达与工件加工开始这之间的一段事件是一个活动
3.在排队模型中,假定用链表来存放排队等待服务的顾客。链表中只有“到达时间”这样的单属性,当前CLOCK =10,已用空间表和可用空间表的情形见下图1,并且任何时候队列中的顾客数不会超过4位。若已知排队系统中依次发生的事件如下表1。 请根据表1中列出的事件画出CLOCK =15,CLOCK =20,CLOCK =25时的已用空间表和可用空间表的情形(注意:画出的图形中必须标上行号)。(8分)
4.库存系统仿真中有哪4种类型的事件?当这4种事件同时发生时,系统如何处理4种事件?(4分) 1 货物到达 2 顾客需求 3 仿真结束 4 月初清库 5.请问输入数据分析的基本步骤有哪些,并简述各个步骤的基本内容?(6分) 输入数据收集 分布的识别 参数估计 拟合度检验 6.在稳态仿真中,哪两种方法能够提高仿真结果的精度?(4分) 重复运行次数和增加运行长度
MSP-FET430UIF 仿真器使用说明
目录 1.功能描述 2.JTAG连接关系 3.IAR开发环境的安装 4.仿真器驱动的安装 5.配置仿真器及仿真方法 5.1编译程序 5.2正确设置仿真器的参数 5.3如何用msp430仿真器调试程序 5.4第三方软件下载程序 6.注意事项 7.常见问题答解
1. 功能描述 a. 本仿真器为USB接口的JTAG仿真器。USB口从计算机取电,不需要外接源, 并能针对不同需求给目标板或用户板提供1.8V~3.6V(300mA)电源。 b. 对MSP430低功耗flash全系列单片机进行编程和在线仿真. c. 完全兼容TI仪器原厂MSP-FET430UIF开发工具。 d. 支持在线升级,烧熔丝加密。 e. 采用TI仪器标准的2×7 PIN(IDC-14)标准连接器。 f. 支持IAR430、AQ430、HI-TECH、GCC 以及TI等一些第三方编译器集成开 发环境下的实时仿真、调试、单步执行、断点设置、存储器容查看修改等。 g. 支持程序烧写读取和熔丝烧断功能。 h. 支持JTAG、SBW(2 Wire JTAG)接口。 i. 支持固件升级功能。 2. JTAG连接关系 仿真器与目标板上MSP430系列MCU的连接关系分为2线连接和4线连接,如下两图所示:(注意:JTAG 接口的定义描述也可以由下图得到) 4 线连接关系示意图
2 线连接关系示意图 3. IAR开发环境的安装 我以iar for msp430 5.5.为例,但是建议安装我们提供的iar for msp430 5.2; 首先,运行“配套光盘:\ msp430软件\IAR安装软件及注册机iar for msp430 5.5.rar” 解压并进行安装。安装步骤如下图所示 等待,直至出现如下图
大学物理实验复习题 一、基础知识部分(误差与不确定度、数据处理、基本测量与方法) (一)问答题 1、什么叫测量、直接测量、间接测量?(看教材) 2、什么叫随机误差?随机误差的特点是什么?(看教材) 3、什么叫系统误差?系统误差的特点是什么?(看教材) 4、下列情况哪些是属于随机误差,哪些是属于系统误差?(从定义角度 考虑) (1)经校准的秒表的读数误差。 (2)在20℃下标定的标准电阻,在30℃下使用引起的误差。 (3)分光计实验中的偏心误差。 (4)千分尺的“零点读数不为零”引起的误差。 (5)读仪表时的视差。 (6)因为温度的随机变化所引起的米尺的伸缩,而用该米尺测长所引起的误差。 (7)水银温度计毛细管不均匀。 (8)仪表的零点不准。 5、什么叫误差、绝对误差、相对误差、视差、引用误差、回程误差、 偏差、残差、示值误差、读数误差、估读误差、标准差?(查相关资料一般了解) 6、误差的绝对值与绝对误差是否相同?未定系统误差与系统不确定度 是否相同?(从定义出发) 7、什么叫不确定度、A类不确定度、B类不确定度?(从定义出发) 8、不确定度与不准确度是否相同?(看教材一般了解) 9、什么叫准确度、正确度、精密度?(从打靶角度分析) 10、对某量只测一次,标准误差是多少?(不变) 11、如何根据系统误差和随机误差相互转化的特点来减少实验结果的误 差?(如测金属丝的平均直径和直径的平均值) 12、测量同一玻璃厚度,用不同的测量工具测出的结果如下,分析各值 是使用哪些量具测量的?其最小分度值是多少?(自做答案) (1)2.4mm (2)2.42mm (3)2.425mm 13、有一角游标尺主尺分度值为1°,主尺上11个分度与游标上12个 分度等弧长,则这个游标尺的分度值是多少?(参考游标卡尺原理)
昆明理工大学电力工程学院学生实验报告 实验课程名称:控制系统仿真实验 开课实验室:年月日
实验一 电路的建模与仿真 一、实验目的 1、了解KCL 、KVL 原理; 2、掌握建立矩阵并编写M 文件; 3、调试M 文件,验证KCL 、KVL ; 4、掌握用simulink 模块搭建电路并且进行仿真。 二、实验内容 电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。试求恒压源的电流I 和电压1V 、2V 。 I V S V 1 V 2 图1 三、列写电路方程 (1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压
四、编写M文件进行电路求解(1)M文件源程序 (2)M文件求解结果 五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析
实验二数值算法编程实现 一、实验目的 掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。 二、实验说明 1.给出拉格朗日插值法计算数据表; 2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据; 3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程; 4.调试和完善MATLAB程序; 5.由编写的程序根据实验要求得到实验计算的结果。 三、实验原始数据 上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算(0.6) f,写出程序源代码,输出计算结果: 四、拉格朗日插值算法公式及流程框图