Creo2.0动态机构仿真操作手册
1 范围
本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介
在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
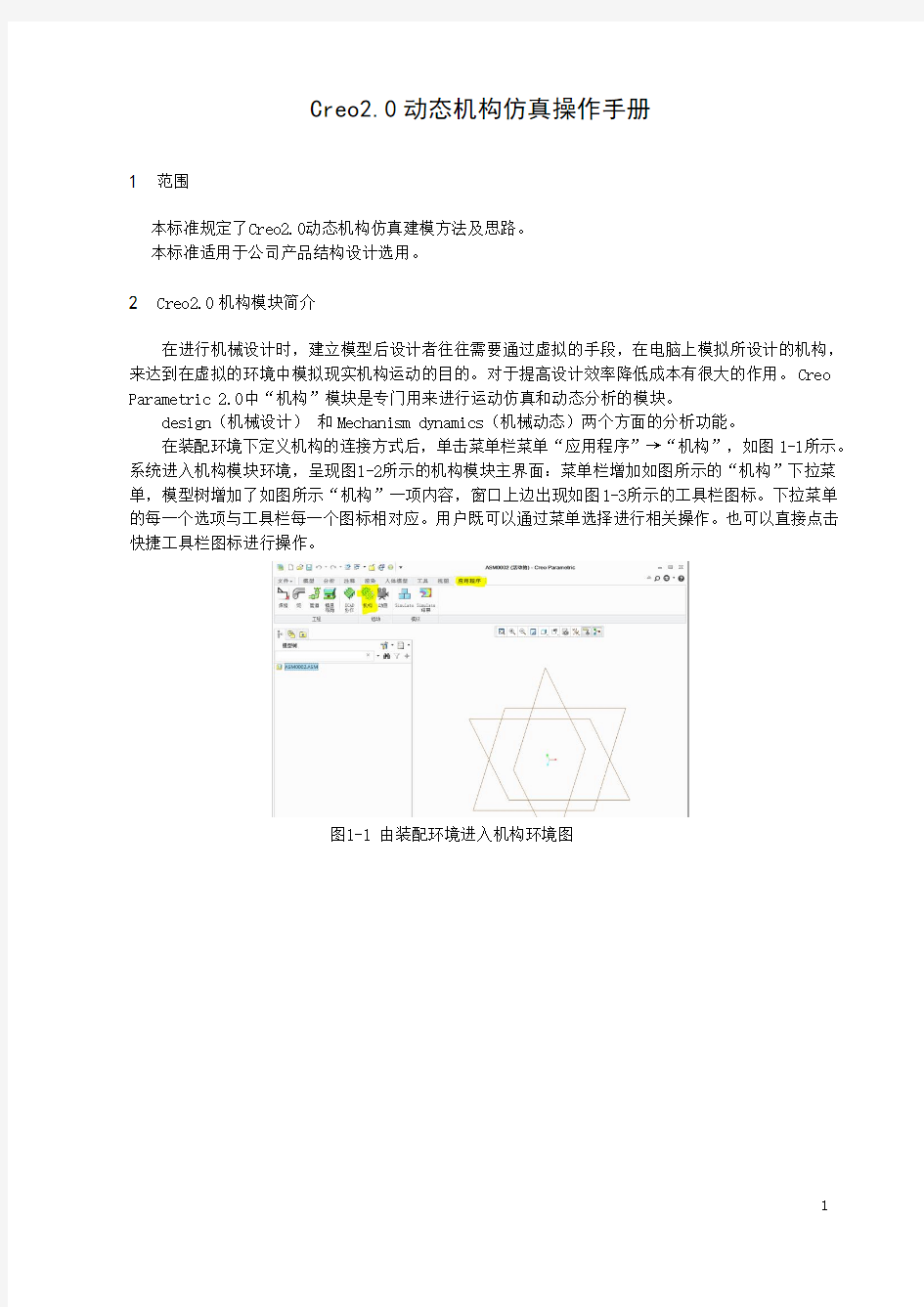
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图
1
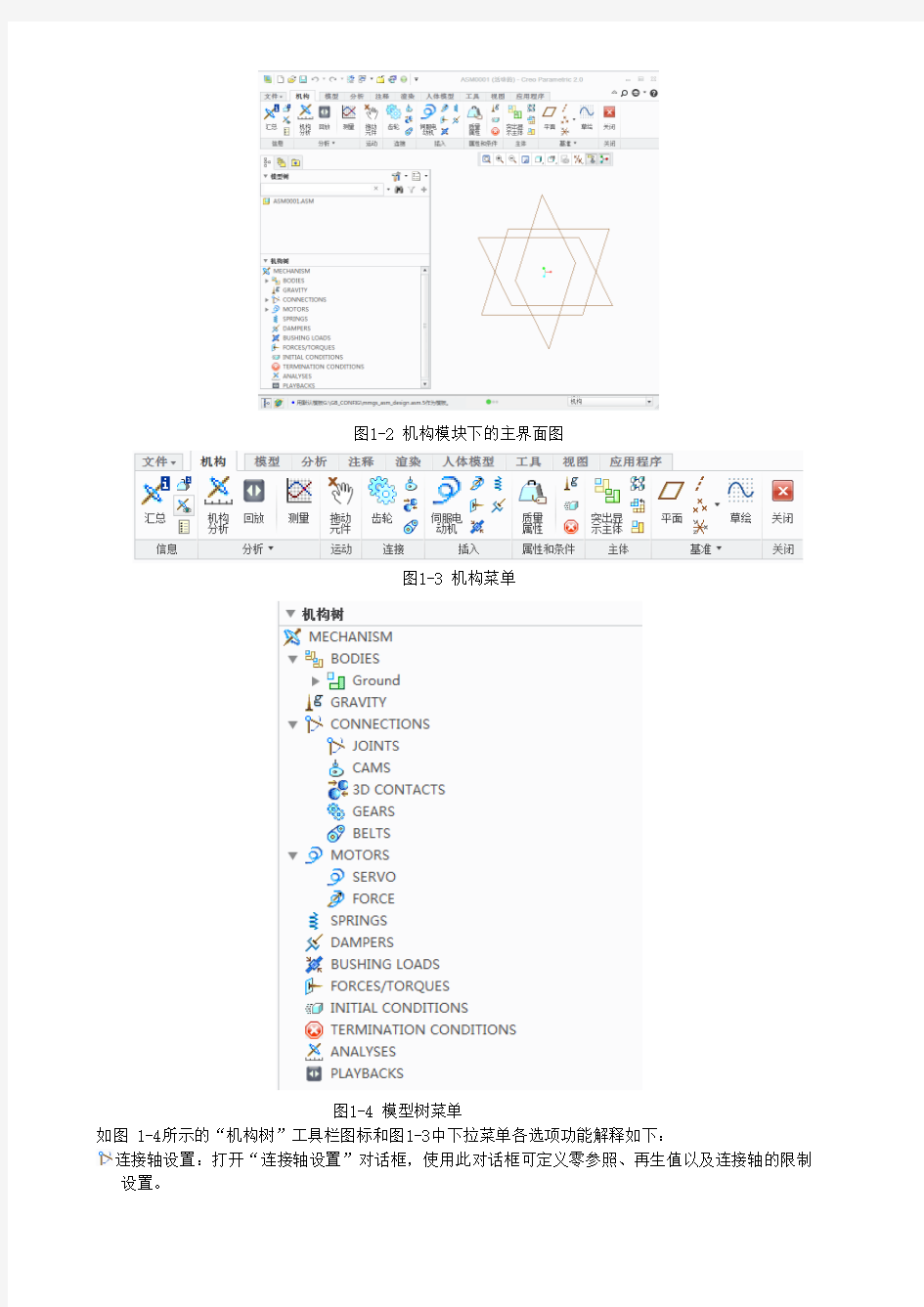
图1-2 机构模块下的主界面图
图1-3 机构菜单
如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:
设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现
有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
阻尼器:打开“阻尼器”对话框,使用此对话框可定义阻尼器,也可编辑、移除或复制现有的阻尼器。
力/扭矩:打开“力/扭矩”(对话框,使用此对话框可定义力或扭矩。也可编辑、移除或复制现有的力/扭矩负荷。
重力:打开“重力” 对话框,可在其中定义重力。
初始条件:打开“初始条件”对话框,使用此对话框可指定初始位置快照,并可为点、连接轴、主体或槽定义速度初始条件。
质量属性:打开“质量属性”对话框,使用此对话框可指定零件的质量属性,也可指定组件的密度。
拖动:打开“拖动”对话框,使用此对话框可将机构拖动至所需的配置并拍取快照。
连接:打开“连接组件”对话框,使用此对话框可根据需要锁定或解锁任意主体或连接,并运行组
件分析。
分析:打开“分析”对话框,使用此对话框可添加、编辑、移除、复制或运行分析。
回放:打开“回放” 对话框,使用此对话框可回放分析运行的结果。也可将结果保存到一个文件中、恢复先前保存的结果或输出结果。
测量:打开“测量结果”对话框,使用此对话框可创建测量,并可选取要显示的测量和结果集。也可以对结果出图或将其保存到一个表中。
轨迹曲线:打开“轨迹曲线”对话框,使用此对话框生成轨迹曲线或凸轮合成曲线
除了这些主要的菜单和工具外。还有几个零散的菜单需要注意。
2.1 【编辑】菜单
重定义主体:打开“重定义主体” 对话框,使用此对话框可移除组件中主体的组件约束。通过单击箭头选择零件后,对话框显示已经定义好的约束,元件和组建参照,设计者可以移除约束,重新指定元件或组件参照,如图1-6所示。
设置:打开“设置” 对话框,使用此对话框可指定"机械设计"用来装配机构的公差,也可指定在分析运行失败时“机械设计”将采取的操作。如是否发出警告声,操作失败时是否暂停运行或是继续运行等等,该配置有利于设计者高效率的完成工作。
3
重定义主体对话框设置对话框
2.2 【视图】菜单
显示设置:机构显示,打开“显示图元” 对话框,使用此对话框可打开或关闭工具栏上某个图标的可见性。去掉任何一个复选框前面的勾号,则该工具在工具栏上不可见。
显示图元对话框
2.3 【信息】菜单:
单击“信息”→“机构”下拉菜单,或在模型树中右键单击“机构” 节点并选取“信息”,系统打开“信息” 菜单,如下左图所示。使用“信息”菜单上的命令以查看模型的信息摘要。利用这些摘要不必打开“机构”模型便可以更好地对其进行了解,并可查看所有对话框以获取所需信息。在两种情况下,都会打开一个带有以下命令的子菜单。选取其中一个命令打开带有摘要信息的Creo Parametric 浏览器窗口。
(1)摘要:机构的高级摘要,其中包括机构图元的信息和模型中所出现的项目数。
(2)详细信息:包括所有图元及其相关属性。
5
信息菜单中机构信息图 摘要信息图
详细信息图 质量属性信息图
3 机械设计模块的分析流程
要进行机构运动仿真设计,必须遵循一定的步奏。Creo Parametric “机械设计”模块包括“机械设计运动”(运动仿真)和“机械设计动态”(动态分析)两部分,使用“机械设计”分析功能,可在不考虑作用于系统上的力的情况下分析机构运动,并测量主体位置、速度和加速度。和前者不同的是“机械动态”分析包括多个建模图元,其中包括弹簧、阻尼器、力/力矩负荷以及重力。可根据电动机所施加的力及其位置、速度或加速度来定义电动机。除重复组件和运动分析外,还可运行动态、静态和力平
衡分析。也可创建测量,以监测连接上的力以及点、顶点或连接轴的速度或加速度。可确定在分析期间是否出现碰撞,并可使用脉冲测量定量由于碰撞而引起的动量变化。由于动态分析必须计算作用于机构的力,所以它需要用到主体质量属性。两者进行分析时流程基本上一致:
4 机械设计运动分析详解
4.1 连接
(1)将光盘文件复制到硬盘上,启动Creo Parametric 。单击菜单“文件”→“设置工作目录”。打开“选取工作目录”对话框工作,将目录设置为E:\PROE 仿真\yuanwenjian\3。单击确定。则系统工作在此目录下。如图所示。
选取工作目录对话框
7 ( 2)新建一装配图
新文件选项对话框
(3)装入零件
打开对话框
元件放置对话框
(5)<>卡,对话框变成如图1-17默认连接的名称为connnection,按照图DT002.prt的轴与DT001.prt轴重合
图 1-17元件放置对话框
连接中的平移图
Creo Parametric 2.0提供了十种连接定义。主要有刚性连接,销钉连接,滑动杆连接,圆柱连接,平面连接,球连接焊接,轴承,常规,6DOF(自由度)。
9
连接与约束 连接与装配中的约束不同,连接都具有一定的自由度,可以进行一定的运动
接头连接有三个目的:
? 定义“机械设计模块”将采用哪些放置约束,以便在模型中放置元件;
? 限制主体之间的相对运动,减少系统可能的总自由度 (DOF);
? 定义一个元件在机构中可能具有的运动类型;
4.1.1 【刚性连接】
使用一个或多个基本约束,将元件与装配连接到一起。连接后,元件与装配成为一个主体,相互之间不再有自由度。如果刚性连接没有将自由度完全消除,则元件将在当前位置被“粘”在装配上。如果将一个子装配与装配用刚性连接,子装配内各零件也将一起被“粘”住,其原有自由度不起作用,总自由度为0.
4.1.2 【销钉连接】
此连接需要定义两个轴重合,两个平面对齐,元件相对于主体选转,具有一个旋转自由度,没有平移自由度。如图示
4.1.3 【滑动连接】 滑动杆连接仅有一个沿轴向的平移自由度,滑动杆连接需要一个轴对齐约束,一个平面匹配或对齐约束以限制连接元件的旋转运动,与销连接正好相反,滑动杆提供了一个平移自由度,没有旋转自由度。
4.1.4 【圆柱连接】
连接元件即可以绕轴线相对于附着元件转动,也可以沿着轴线相对于附着元件平移,只需要一个轴对齐约束,圆柱连接提供了一个平移自由度,一个旋转自由度。
4.1.5 【平面连接】
平面连接的元件即可以在一个平面内相对于附着元件移动,也可以绕着垂直于该平面的
轴线相对于附着元件转动,只需要一个平面匹配约束。
4.1.6 【球连接】
连接元件在约束点上可以沿附着组件任何方向转动,只允许两点对齐约束,提供了一个平移自由度,三个旋转自由度。
11
4.1.7 【轴承连接】
轴承连接是通过点与轴线约束来实现的,可以沿三个方向旋转,并且能沿着轴线移动,需要一个点与一条轴约束,具有一个平移自由度,三个旋转自由度。
4.1.8 【焊缝连接】 连接元件和附着元件之间没有任何相对运动,六个自由度完全被约束了。
焊接将两个元件连接在一起,没有任何相对运动,只能通过坐标系进行约束。
刚性连接和焊接连接的比较:
(1)刚性接头允许将任何有效的组件约束组聚合到一个接头类型。这些约束可以是使装配元件得
以固定的完全约束集或部分约束子集。
焊接接头的作用方式与其它接头类型类似。但零件或子组件的放置是通过对齐坐标系来固定
的。
(3)当装配包含连接的元件且同一主体需要多个连接时,可使用焊接接头。焊接连接允许根据开
放的自由度调整元件以与主组件匹配。
(4)如果使用刚性接头将带有“机械设计”连接的子组件装配到主组件,子组件连接将不能运动。
如果使用焊接连接将带有“机械设计”连接的子组件装配到主组件,子组件将参照与主组件
相同的坐标系,且其子组件的运动将始终处于活动状态。
4.1.9 【常规连接】
由自定义组合约束,根据需要指定一个或多个基本约束形成一个新的组合约束,其自由度的多少因
所用的基本约束种类及数量的不同面不同。可用的基本约束有:距离、生命、平行、自动4种。在定义的时候,可根据需要选择一种,也可先不选取类型,直接选取要使用的对象,此时在类型那里开始显示为“自动”,然后系统根据所选择的对象自动确定一个合适的基本约束类型。
4.1.10 【6DOF 连接】
对元件不作任何约束,保持6自由度,仅用一个元件坐标系和一个装配坐标系重合使元件与装配发
生关联。元件可任意旋转的平移,具有3个旋转自由度和3个平移自由度,总自由度为6。
4.1.11 【槽连接】
是两个主体之间的一个点-曲线连接。从动件上的一个点,始终主动件上的一根曲线(3D )上运动。
槽连接只使两个主体按所指定的要求运动,不检查两个主体之间是否干涉。点和曲线甚至可以是零件实体以外的基准点和基准曲线,当然也可以在实体内部。
4.2 特殊连接
在Creo中有三种特殊的连接,可以设置特殊连接后进行各种分析,这四种连接分别为凸轮连接、3D接触连接、齿轮连接、传动带连接下面分别介绍:
4.2.1 【凸轮连接】
点击【应用程序】→【机构】→【凸轮】或直接点击图标进入凸轮机构连接对话框,点击“新建弹出凸轮从动机构连接定义”对话框,名称编辑框显示出系统缺省定义的凸轮名称。
1 【凸轮1】选项卡:定义第一个凸轮
(1)“曲面/曲线”:单击箭头选取曲线或曲面定义凸轮工作面,在选取曲面时若钩选自动选取复选框
则系统自动选取与所选曲面相邻的任何曲面,凸轮与另一凸轮相互作用的一侧由凸轮的法线方向指示。如果选取开放的曲线或曲面,会出现一个洋红色的箭头,从相互作用的侧开始延伸,指示凸轮的法向。
选取的曲线或边是直的,“机械设计模块”会提示选取同一主体上的点、顶点、平面实体表面或基准平面以定义凸轮的工作面。所选的点不能在所选的线上。工作面中会出现一个洋红色箭头,指示凸轮法向。
通过曲面选取方式
通过直线选取方式
2【凸轮2】选项卡:定义第二个凸轮,与【凸轮1】选项卡类似。
3【属性】选项卡
(1)升离:启用升离允许凸轮从动机构连接在拖动操作或分析运行期间分离
e在0-1之间
(2)摩擦:μs静摩擦系数
μk 动摩擦系数
4.2.2 【3D接触连接】
【3D 接触】工具对元件不作任何约束,只对3D模型进行空间点重合来使元件与装配发生关联。
元件可任意旋转和平移,具有3个旋转自由度和3个平移自由度,总自由度为6。
下面以两球为例,讲解【3D接触】工具的使用方法。
(1)新建一装配图。
(2)选择球体零件“q01.prt”,加载到当前装配图中,选择连接类型为【用户定义】,约束类型为【固定】,完成第一个球的放置。
(3)利用【组装】命令再加载一个球到时当前装配图中。
(4)选择功能区中的【应用程序】→【机构】命令,系统自动进入机构设计平台。
(5)选择功能区中的【机构】→【连接】→【3D 接触】命令,系统弹出“3D接触”操控面
板,如下图所示
13
(6)在3D模型中,分别选择两球,单击“完成”按钮,完成3D接触连接。
4.2.3 【齿轮连接】
使用齿轮副可控制两个连接轴之间的速度关系。齿轮副中的每个齿轮都需要有两个主体和一个接头连接。第一主体指定为托架,通常保持静止。第二主体能够运动,根据所创建的齿轮副的类型,可称为齿轮、小齿轮或齿条。齿轮副连接可约束两个连接轴的速度,但是不能约束由接头连接的主体的相对空间方位。
在齿轮副中,两个运动主体的表面不必相互接触就可工作。这是因为“机械设计”中的齿轮副是速度约束,并非基于模型几何,因此可以直接指定齿轮比。
1【齿轮1】选项卡:
(1) 连接轴:选取一个连接轴
(2) 主体:
齿轮:选取一个旋转连接轴。接头上出现一个双向的着色箭头,指示该轴的正方向。旋转方向由右手定则确定。
托架:选取托架
使齿轮和托架颠倒。
(3)节圆:输入节圆直径后按Enter键改变节圆大小。
(4)图标位置:显示节圆和连接轴零点参照。单击鼠标中键可接受缺省位置
2【齿轮2】选项卡:同上
3【属性】选项卡:
【齿轮比】:定义齿轮副中两个齿轮的相对速度
(1)节圆直径:使用在“齿轮1” 和“齿轮2”选项卡中定义的节圆直径比的倒数作为速度比,D1 和 D2 变为不可编辑。
2)用户自定义:在“齿轮1” 和“齿轮2”下输入节圆的直径值。齿轮速度比等于节圆直径比的值。
4.2.4 【传动带连接】
【传动带】工具是通过两带轮曲面与带平面重合连接的工具。带传动是由两个带轮和一根紧绕
在两轮上的传动带组成,靠带与带轮接触面之间的摩擦力来传递运动的动力的一种挠性摩擦传动。
传动带连接使用实例:
(1)分析图中机构连接方式:该带传动机构是将旋转运动从输入轴传递到输出轴上,可以适用于远距离传递,所以两带轮在装配中进行销连接。
(2)选择带轮零件所在的文件夹作为工作目录,新建一装配图,模板为“mmns_asm_design”。
(3)创建【骨架模型】,在模型上创建两条垂直与FRONT面的平行基准轴,两轴距离设为100
15
(4)以连接类型为“销”分别上两根基准轴上各装入一带轮,两带轮各自与FRONT面对称。(5)选择功能区中的【应用程序】→【机构】→【连接】→【带】命令,系统弹出“带”
操控面板,如下图
(6)按Ctrl键,在3D图中选择两带轮的曲面,如下图所示:
(7)在“参考”下滑面板中单击【带平面】文本框,在3D图中选择小带轮的FRONT基准面。(8)单击“完成”按钮,完成带传动的设计,带传动连接添加到模型树和机构树中,如下图所示
4.3 连接过程中的调整方式
在连接机构时,常常会出现位置放置不合理现象,使得连接设置无法快速定位,可通过手动的方式来直接移动或转动元件到一个比较恰当的位置。该过程主要是通过“元件放置”对话框中的“移动”选项卡来完成。如图所示。
移动方式图
(1)“定向模式”:可相对于特定几何重定向视图,并可更改视图重定向样式,可以提供除标准的旋
转、平移、缩放之外的更多查看功能。
(2)“平移”:单击机构上的一点,可以平行移动元件。
(3)“旋转”:单击机构上的一点,可以旋转元件。
(4)“调整”:可以根据后面的运动参照类型,选择元件上的曲面调整到参照面,边,坐标系等。
选择调整,会弹出图1-28所示的选取对话框。
2.“运动参照”组合框:选择需要参照的类型
(1)“视图平面”:系统缺省采用此种参照,且不会弹出图1-28所示的对话框。除了该项外,选择下面任何一项均会弹出1-28所示的对话框。
(2)“选取平面”:可以选择创建的基准面,或是曲面作为参照。
(3)“图元/边”:可以选择图元上的边作为参照。
(4)“平面法向”:可以选择某个平面,则系统自动选取该平面的法向为参照。
(5)“2点”:可以选择两点定义矢量方向作为参照。
(6)“坐标系”:选择坐标系作为参照。
3. “平移”
(1)“平移”下拉框:有光滑,1,5,10四个选项。选择光滑,一次可以移动任意长度的距离。
其余是按所选的长度每次移动相应的距离。
(2)“选转”下拉框:有光滑,5,10,30,45,90六个选项。其中光滑为每次旋转任意角度。其余是按所选的角度每次旋转相应的角度。
4.“位置”组合框:当用鼠标移动元件时,在“相对”文本框中显示移动的距离。
4.4 连接轴设置
定义完连接后,元件就能相对主体进行一定的运动,可以进行连接轴设置,以进一步设定运动的范
17
围,运动的起点等。单击【机构】→【连接轴设置】进入【连接轴设置】对话框,如图所示。各选项介绍如下:
1.【选取元件零参考】选项组
单击箭头用鼠标在机构上选取连接轴
2.【连接装配零参考】选项组
表示连接轴位置的度量,对于连接轴使用角度表示的,是相对于零点位置的角度值,介于-180-180度之间。
3.【设置零位置】选项卡
(1)【指定参照】复选框:勾选该复选框,绿色主题参照和橙色主体参照变为可选。
(2)【绿色主体参照】选项组:选取一个点、顶点、曲面或平面作为“绿色主体参照”。
(3)【橙色主体参照】选项组:选取一个点、顶点、曲面或平面作为“橙色主体参照”。
这里的主体主要是指如果通过 Creo Parametric 中的连接方式将主体连接一起,则第一主体是组件,被添加的主体是元件。“零参照”选项卡上的绿色主体指元件放置过程中的组件主体,而橙色主体则指元件。选取连接轴后,系统会将组件主体和元件主体分别以绿色和橙色显示,同时“机械设计”还显示平面或向量,用来定义零点参照。对于平移连接轴,显示一个绿色平面和一个橙色平面。对于旋转连接轴,显示一个绿色箭头和一个橙色箭头。另一个绿色箭头用于指示正测量的方向。这些参照会改变方向,以反映“连接轴位置”<>文本框中的值。
4.【重再生成值】选项卡:
勾选指定再生值复选框,在【重再生成值】文本框中输入想要的位置,再按下Enter键,机构即可按指定的位置重新生成。如图所示。
连接轴设置对话框
(1)启用限制:勾选此复选框,可以为连接轴指定最小和最大位置,限制连接轴在此范围内运动。恢复系数用在凸轮从动连接,槽连接等具有冲击的运动中,恢复系数定义为两个图元碰撞前后的速度比,数值范围为0-1。完全弹性碰撞的恢复系数为 1。完全非弹性碰撞的恢复系数为 0。
(2)启用摩擦:勾选此复选框,可以为连接轴指定摩擦,为静摩擦系数,为动摩擦系数,R为接触半径(只限于旋转轴)。
动态属性选项卡
接上面的例子example1
(6)单击【应用程序】→【机构】,选择【连接轴设置】。弹出【连接轴设置】对话框,单击“选取连接轴”,通过鼠标选取上面所定义的连接轴。在“连接轴位置”文本框中输入角度为120度,单击【生成零点】。
(7)单击【再生值】选项卡,勾选【启用再生值】复选框,在【再生值】文本框中输入60,按下Enter 键,机构立即改变到图所示的位置。重新输入-120度,按下Enter键,机构立即改变到图1-33所示的位置,单击确定按钮。此两幅图依据读者的系统有所不同。主要是体验一下连接轴的设置功能。读者可以自行输入自己所要的角度值进行比较。
60度位置图 120度位置图
4.5 拖动功能
定义完连接轴后,可以使用拖动功能,来查看定义是否正确,连接轴是否可以按设想的方式运动。可使用快照创建分析的起始点,或将组件放置到特定的配置中。可以使用接头禁用和主体锁定功能来研究整个机械或部分机械的运动。单击【机构】→【拖动】或直接单击工具栏图标可以进入拖动对话框。
1.快照与拖动工具栏:
给机构拍照。拖动到一个位置时单击此按钮可以拍照。同时该照添加到快照列表中。
19
拖动点。选取主体上某一点,该点会突出显示,并随光标移动,同时保持连接。该点不能为基础主体上的点。
拖动主体。该主体突出显示,并随光标移动,同时保持连接。不能拖动基础主体。
撤消命令。
重做命令。
接受缺省约束定义为基础主体。
2.快照选项卡:
显示选定快照。在列表中选定快照后单击此按钮可以显示该快照中机构的具体位置。
打开“快照构建”对话框,选取其他快照零件位置用于新快照。就是拷贝其他快照。
将选定快照的名改为“当前快照” 输入框中的名称。相当于改变列表框中快照的名称。
使选定快照可用作 Creo Parametric分解状态。随后分解状态可用Creo Parametric 绘图视图中。
单击此按钮时,“机械设计”在列表上的快照旁放置一个图标。
从列表中删除选定快照。
图1-34拖动对话框图1-35 约束选项卡
3.【约束】选项卡:
应用约束后,“机械设计”会将其名称放置于约束列表中。通过选中或清除列表中所选约束旁的复选框,可打开和关闭约束。也可选择如下选项进行临时约束:
选取两个点、两条线或两个平面。这些图元将在拖动操作期间保持对齐。
选取两个平面。两平面在拖动操作期间将保持相互匹配。
为两个平面定向,使其互成一定角度。
并选取连接轴以指定连接轴的位置。指定后主体将不能拖动。
可设定是否允许凸轮分离
并选取主体,可以锁定主体。
并选取连接。连接被禁用。
ZDBX-2 电脑剥线机使用说明书 一.技术性能 1.适用加工导线种类:VSF、IV、KV、玻璃纤维护套线。 2.加工范围:AWG30#~12# 3.切割长度:1~99999mm 4.长度相对误差:±(0.2±0.002)mm 5.剥头长度:前端:1~30mm,后端:1~25mm 6.最高加工速度:(当L=100时)85条/分 7.具备切断、切痕、全剥、半剥功能 二.输线调整方法 1.A、松开压力调节旋钮(5)(6),同时将输线轮间隙调节旋钮(3)(4)向上方向旋转,使上下输线轮间隙大于被加工导线外径。B、根据导线外径,选择合适的导管(12),导套(13)(14),导管装入导管座后调节前端尽量靠近刀口,摆动导管,视其前端不与刀口相碰擦。C、将导线穿过导套进入导管,顺时针方向旋动压力调节旋钮,同时向下转动间隙调节旋钮(6),使上下输线轮压紧导线,用手拉导线不打滑,左边(后)输线轮调节方法同左(前)输线轮。注:压力和间隙对导线与输线轮间的摩擦力互为关系,压力—压强、间隙—接触面积,调节时注意恰到好处,即既不压伤导线,又不打滑为最佳。 1、(附示意图)
(1)(2)输线轮间隙调旋钮(3)(4)上下轮间隙调节盘 (5)(6)上下轮压力调节旋钮(7)(8)左侧滚轮 (9)(10)右侧滚轮(11)刀架(12)导管 (13)(14)导套(15)校直器 2、机器后视 3、校直器(旧说明书P5) 三.程序设定和调整方法 1.开机: 按照红色急停旋钮所示方向转动旋钮,使之升起,再拨动船型电 源开关至“通电”,此时指示灯和显示屏背光亮,表示通电。 2.设定 (1)键的种类
1、键“A、B、C、D、JD、SUM、TOT、求助、增加、减少 补偿、确认求助用以显示液晶显示屏上相对应的数字。 II、键“切断、点动、复位、启动、继续、停机用以操作剥线机的动作。 III、键0~9用以输入数字。 (2)设定加工程序 首先在显示屏上输入加工数据。 以下图为例:导线线号为AWG#30、全剥。 A—导线前端剥头长度 C—导线前端外皮拉(移)动距离 L—导线总长度 B—导线后端剥头长度 D—导线后端外皮拉(移)动距离 设定方法如下: 按动A,显示屏对应数字闪动,按数字键0,再按6,显示屏显示06,为前端剥头长度6mm,按动C,输入07,注:全剥时C>A,D>B。按动L,输入00100显示屏显示00100,总长为100mm,按动B键,输入04,再按D,输入05,以上完成加工长设定需半剥时,设定A>C,B>D。(C和D表示设定。剥头拉开距离)
C r e o动态机构仿真操 作手册 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】
Creo2.0动态机构仿真操作手册 1 范围 本标准规定了Creo2.0动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 Creo2.0机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图 图1-2 机构模块下的主界面图 图1-3 机构菜单
图1-4 模型树菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下: 连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。 凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
全自动电脑剥线机 使用说明书 适用围 全自动电脑剥线机适用于单股、多股导线的切断、剥头、剥尾、中间剥的加工,加工最大截面积0.1-4.5mm 2,切断最大长度为9999mm,剥头35mm,剥尾15mm。主要适用于电子、电器、玩具、汽摩配等行业的线束加工。 重量:31KG 外形尺寸:390mm×350mm×255mm 功率:120 – 200W 显示方式:LCD液晶显示屏 切割长度:1mm – 9999mm 切割公差:0.002×L以(L =切割长度) 剥离长度:0 – 35mm 切割线芯截面积:0.1 – 4.5mm2 导管最大直径:¢8 中间剥皮:10处剥 刀具材料:优质钨钢 剥线速度:2000 – 80000根/小时 驱动方式:两轮 调节速度:0最慢,9最快
安全使用注意事项 首先非常感您购买SWT系列全自动电脑剥线机!为了确保您能安全与正确地使用该机器,请在使用之前详细阅读本使用说明书。 一、为了使机器工作电压稳定,敬请用户选配电源稳压器,以避免电压过高而烧 坏该机器。 二、使用时该机器应放置于平坦稳固的表面上操作,以免掉落损坏机器。 三、请勿在靠近电磁场较强的区域使用该机器,以免对该机器产生干扰。 四、使用时不得在该机器上面放置任何物品,不得接近腐蚀性的化学物品,务必 保持工作环境干燥、通风、无灰尘,工作室温:0–35℃。 五、使用时该机器如果出现不理想的剥线效果或不同程度的故障,敬请阅读本使 用说明书中的故障及排除方法,如果仍无法解决,请拨打我们的技术服务咨询检修的方法,为了您的安全起见,请勿自行拆卸该机器进行检修。
目录 一、剥线机的主要结构 二、快速操作方法 三、机械部分工作原理 四、面板操作与参数设定 五、刀口位置调整 六、参数名词说明 七、售后服务承诺 八、故障及排除方法
电脑剥线机操作规程 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
电脑剥线机的操作规范1程序:程序是指线的规格长短有多种,将每种规格(即线长、线头、线尾、剥开、延时、退刀、剥头、剥尾、线径、速度、定量、批量构成一种规格)储存到一指定的程序号之中,程序号选01-99(25毫米-10米);00程序为试机专用,98号程序为短线专用,线长限定为1-25毫米。 2定量:是将此程序内所有储存的规格,需要生产多少,给予报警及停机。 3产量:检查生产情况,每到一百根时,电脑会自动报警,但不停机,在产量=定量时,电脑会自动报警并自动停机。 4剥线机的程序设置有99种,根据生产需求可将下线规格储存电脑中,避免同规格的每次重设制。 5线长:线长是指所需电线的总长度,如图4-1、图4-2(包括线头、线尾长度)。 6线头:线头是指电线的首端剥出的长度。如图4-1、图4-2 7线尾:线尾是指电线的尾端剥出的长度。如图4-1、图4-2 8剥头:剥头是指电线的首端剥开的长度,剥头大于等于线头为全剥开,小于时为半剥开,(即剥头大于线尾为全剥,剥头小于线头为半剥开)剥出的护套,套住线头,以免在各工序流程中弄乱线芯。 9剥尾:剥尾是指电线的尾端要剥开的长度,如果剥尾大于等于线头为全剥开,小于时为半剥开,(即剥尾大于线尾为全剥,剥尾小于线尾为半剥)剥出护套,套住线头,以免在各工序流程中弄乱线芯。
10线径:线径是指电线线芯的直径,显示的数据表示线径粗细的值(并不是指线芯的直径大小),在机器运动中,如线头剥不开,需调整线径使其变小,如线头剥开将线芯铜线切断,需调整线径值使其变大,(一般为30-90,数值仅为参考)。 11速度:机器运行中的速度、快慢调节方法为:运行过程中按停机键,通过“加1”或者“减1”键来调节,速度分为:00-09档,00为最慢,09为最快。(目前公司设置:线材㎜速度05;线材速度03) 12 剥开:剥开是指电线中间剥开的长度,剥开的距离与线长的强度有关,线皮的强度太强就难拉开,对刀具影响较大,线皮的强度差的容易拉开,此功能跟线皮与线芯裹的松紧有关,跟线皮材料有关。 13 退刀:退刀是指刀具破线皮之后,刀片退到一定的位置来剥开线皮(一般为00-10数值),一般线皮薄的参数设置小,线皮厚的参数设置大。(一般设定为02-03。一般设定为03-05) 14刀值:刀值是指刀子到铜线的距离。(刀值的大了线皮无法剥脱,刀值小铜线会切断)
限公司管理文件 编号:RH-GC-02-2014 第1页;共5页 一、设备名称:剥线机 二、使用 1、操作人员应熟悉剥线机使用说明书中的各项内容,并了解各部分的结构及性能。将剥线机置于清洁、干燥通风良好的环境中使用。 2、使用前应检查供电是否正常,接线是否可靠,成套各部位是否紧固。 三、操作和调整 图1 1、连接好剥线机电源,将右侧滚轮上升开关调到上位置,将待剥电源线按上图方式插入导管内,再将滚轮开关调到下位置,并调节右侧轮间隙调整开关,使滚轮间隙至刚刚接触到线材后再往下调2大格; (左侧滚轮也调至可将电源线压紧状态,若已处于压紧状态,则不需调节间隙调整开关) 1、 左侧滚轮上升开关 8、 右进线孔 2、 右侧滚轮上升开关 9、 右侧滚轮压力调整钮 3、 左侧轮间隙调整开关 10、 导管(粗/细线导管不通用) 4、 右侧轮间隙调整开关 11、 左上滚轮 5、 刀座 12、 左下滚轮 6、 右上滚轮 13、 左侧滚轮压力调整钮 7、 右下滚轮 14、 进线滚轮 14 13 11 10 12 5 3 2 1 4 6 9 8 7
限公司管理文件编号:RH-GC-02-2014 第2页;共5页 2、打开电源开关,按图纸要求调节剥线机参数设置; 图2 按面板“”移动键,将光标移至程序位置,可设置01-99个可记忆程序(00为试机专用,无记忆功能,01-89为常规程序,90-99为超短线程序)。 按面板“”移动键,将光标移至速度位置,可设置00-99(其中00最慢,-99最快)。 按面板“”移动键,将光标移至线长位置,根据图纸要求,按右边数字键输入线长尺寸。 按面板“”移动键,将光标移至产量位置,此设置默认为“0000”生产到了定量设定值后,电脑自动报警并停机。 按面板“”移动键,将光标移至线头位置,根据图纸要求,按右边数字键输入线头剥皮尺寸。 按面板“”移动键,将光标移至剥头位置,剥头数值≧线头数值线皮剥落,剥头数值<线头数值线皮不剥落,按右边数字键输入剥头尺寸。 按面板“”移动键,将光标移至线尾位置,根据图纸要求,按右边数字键输入线尾剥皮尺寸。 按面板“”移动键,将光标移至剥尾位置,剥尾数值≧线尾数值线皮剥落,剥尾数值<线尾数值线皮不剥落,按右边数字键输入剥尾尺寸。
Creo原创教程(九),接触碰撞运动仿真解析,引申模具顶针顶出件运动 今天我们来讲一下接触碰撞运动的仿真(这个恐怕是坛子里对凸轮连接最详细的教程)
之前很多人pm还有在qq群问我说做模具顶出件运动怎么做, 我直接回答用凸轮连接对设置连接,启用升离,再启用重力就可以了,这样还是有很多人不太明白,其这个东西听着很简单,里面还有很多的窍门和方法 再加上一些经验,只要你看过了本教程,再加上平时多联系,相信接触碰撞这里,一般的问题都可以解决了,我们来看一下,以前的2001版本以前方针分 析里面比较简单,简单的方针都可以做到,但是到了野火版本以后,功能提升了好多,在野火中有三种特殊的连接,可以设置特殊连接后进行各种分析, 这三种连接分别为凸轮副连接,槽连接,齿轮运动副连接,今天讲的是接触碰撞的仿真,主要用到的是凸轮的链接,所以只讲凸轮,齿轮和槽连接以后再 讲。 顶针顶出件运动仿真,其实就是在顶针头部和接触的件之间建立一个凸轮连接,有人会问,顶针和件是两个平面与平面相碰,怎么建立凸轮,在凸轮连接 时,里面有一些技巧,尤其是建立曲面和选择曲面时,技巧性比较强,相信很多高手有些时候都那凸轮连接因没有选择好曲面或是没有建立好曲面,导致 仿真多次失败。 我们先看一下凸轮的链接设置
1 “凸轮1”选项卡:定义第一个凸轮 (1)“曲面/曲线”:单击箭头选取曲线或曲面定义凸轮工作面,在选取曲面时若钩选自动 选取复选框则系统自动选取与所选曲面相邻的任何曲面,凸轮与另一凸轮相互作用的 一侧由凸轮的法线方向指示。如果选取开放的曲线或曲面,会出现一个洋红色的箭头, 从相互作用的侧开始延伸,指示凸轮的法向。 选取的曲线或边是直的,“机械设计模块”会提示选取同一主体上的点、顶点、平面实 体表面或基准平面以定义凸轮的工作面。所选的点不能在所选的线上。工作面中会出现 一个洋红色箭头,指凸轮法向。
电脑剥线机的操作规范 1程序:程序是指线的规格长短有多种,将每种规格(即线长、线头、线尾、剥开、延时、退刀、剥头、剥尾、线径、速度、定量、批量构成一种规格)储存到一指定的程序号之中,程序号选01-99(25毫米-10米);00程序为试机专用,98号程序为短线专用,线长限定为1-25毫米。 2定量:是将此程序内所有储存的规格,需要生产多少,给予报警及停机。 3产量:检查生产情况,每到一百根时,电脑会自动报警,但不停机,在产量=定量时,电脑会自动报警并自动停机。 4剥线机的程序设置有99种,根据生产需求可将下线规格储存电脑中,避免同规格的每次重设制。 5线长:线长是指所需电线的总长度,如图4-1、图4-2(包括线头、线尾长度)。 6线头:线头是指电线的首端剥出的长度。如图4-1、图4-2 7线尾:线尾是指电线的尾端剥出的长度。如图4-1、图4-2 8剥头:剥头是指电线的首端剥开的长度,剥头大于等于线头为全剥开,小于时为半剥开,(即剥头大于线尾为全剥,剥头小于线头为半剥开)剥出的护套,套住线头,以免在各工序流程中弄乱线芯。 9剥尾:剥尾是指电线的尾端要剥开的长度,如果剥尾大于等于线头为全剥开,小于时为半剥开,(即剥尾大于线尾为全剥,剥尾小于线尾为半剥)剥出护套,套住线头,以免在各工序流程中弄乱线芯。 10线径:线径是指电线线芯的直径,显示的数据表示线径粗细的值(并不是指线芯的直径大小),在机器运动中,如线头剥不开,需调整线径使其变小,如线头剥开将线芯铜线切断,需调整线径值使其变大,(一般为30-90,数值仅为参考)。 11速度:机器运行中的速度、快慢调节方法为:运行过程中按停机键,通过“加1”或者“减1”键来调节,速度分为:00-09档,00为最慢,09为最快。(目前公司设置:线材0.1㎜速度05;线材2.5-3.0㎜速度03) 12 剥开:剥开是指电线中间剥开的长度,剥开的距离与线长的强度有关,线皮的强度太强就难拉开,对刀具影响较大,线皮的强度差的容易拉开,此功能跟线皮与线芯裹的松紧有关,跟线皮材料有关。 13 退刀:退刀是指刀具破线皮之后,刀片退到一定的位置来剥开线皮(一般为00-10数值),一般线皮薄的参数设置小,线皮厚的参数设置大。(0.1mm一般设定为02-03。2.0mm-3.0mm一般设定为03-05) 14刀值:刀值是指刀子到铜线的距离。(刀值的大了线皮无法剥脱,刀值小铜线会切断)
前言 (1) 注意事项 (2) 一、外观结构介绍 (3) 二、显示屏及显示模式 (6) 三、程序的设定及加工 (10) 四、配件的调换 (13) 五、常见故障及排除方法 (17)
1、我厂本着“用户至上”的服务宗旨,对所有BX-C系列电脑剥线机实行“一年保修、终生维护”的售后政策,为用户提供完备的服务。 2、本机保修期为一年(从开具发票之日起),一年之内因质量问题引起机器不能正常工作的或发生异常情况的,其与我厂维修部及销售部联系。 3、以下情况不属于保修范围; (1)用户使用不当引起损坏的; (2)自行拆机造成损坏的; (3)使用电压不符合规定的; (4)因不可抗拒力引起损坏的。 4、保修期过后,更换易损件和维修配件需收适当成本费。 5、用户可将机器托运至我厂,亦可我厂派员前往,保修期外,我厂人员差旅费由用户承担。 6、用户可以电话或EMAIL与我们联系,也可将用户信息表回折返回给我们,以便我们为您提供更好的服务。
注意事项 一、工作电源:AC220V±10%,50~60Hz。为了使该机正常工作,用户必须配备 稳压电源。 二、采用本机的专用电源线。 三、保证本设备工作的走边环境清洁、无粉尘、无腐蚀性化学品、无强电磁场 干扰。工作环境温度:-10℃~+35℃。切勿放置在极冷、极热的环境中、保证通风良好。 四、勿与频繁使用继电器、电磁铁等工作的设备同一组电源。 五、定期给机械传动部位进行润滑维护。 SHBX系列电脑剥线机技术参数
一、外观结构介绍 1、 机芯前面板介绍 图1-1 ①②压轮上下移动旋钮 ③④上下轮间隙调节盘 ⑤⑥上下轮压力调节旋盘 ⑦⑧右侧滚轮 ⑨⑩左侧滚轮 ⑾⒁导套 ⑿刀架 ⒀导管 ⒂校直器 2、 机器后观 图1-2
1. 目的 为规范全自动电脑剥线机的操作,保证操作人员及设备的安全,保证加工的导线能够达到规定要求,特制定本操作规程。 2. 适用范围 本规程适合于利用全自动电脑剥线机进行导线剥皮的操作过程。 3. 操作程序及注意事项 3.1工作前准备 3.1.1 检查设备状态标识是否处于”完好”状态。 3.1.2 检查设备周围是否有异物,以免影响设备正常运转。 3.1.3确认设备电源线插头是否插在带有漏电保护的插座上(确保设备工作电源为AC220-250V,50-60Hz)。 3.1.4确保工作区域没有较强的电磁场,以免对设备造成干扰。 3.1.5 依据欲生产产品工艺文件中的《配线明细表》准备相应导线。 3.2操作步骤 3.2.1开机:待设备与工作环境符合设备使用条件时,按下设备电源开关,接通电源。 3.2.2程序设定:开机后按↑或↓移动光标选择并设定程序(参照《参数设定说明》执行)。 3.2.3线轮间隙调节(压紧状态):出线轮间隙调节--将要剥的线压到出线轮中间,调节出线轮使其间隙张开到最合适的位置,取出线;进线轮紧系调节--将要剥的线压到进线轮中间,调节进线轮间隙,使进线轮之间的间隙与出线轮之间的间隙相当即可。 3.2.4 试裁线:将线穿进进线口、进线轮,经过导管再通过刀口,然后移动光标到程序的第二页的线径上,按一下停止键,两刀会相切一下,再取出线,查看其切口处,如线皮没切透,就减少线径数值,如切到铜丝,则增大线径数值。 3.2.5 试剥线:按运行键开始试剥,。 3.2.6设定加工数量:在所选择的程序中的“定量”参数进行设定,可根据实际所需要的数量来设定,产量预设为0000,当产量=定量时机器停止工作。 3.2.7生产:按运行键开始生产。 3.3 工作后 3.3.1 关掉设备电源,把物料(导线)从设备上取出。 3.3.2 清除剥线机刀口上的碎屑、擦拭,使设备与环境保持清洁状态。 3.3.3擦拭工作台,打扫工作场地周围地面,确保清洁无切屑与碎导线头。
一、产品外部组件与技术参数 01.主机02.电源(220V)03.液晶显示屏04.操作键盘05-06.线型调节器07.导线座08.微调压线轮09.导线管座10.导线管11.剥线刀12.传动轮13.调节螺杆14.送料架15.送料轮16.保护罩 二、技术参数
三、操作方法 本机操作简单,纯电脑控制。具体操作方法如下: 操作键盘 1.使用上(UP)、下(DOWN)键移动光标至所需位置,直接输入预设数值即可。用“加1(lncrease) ”、“减1(Reduce)”更正数值。 2.功能键,当光标移动到“线径”处,按下“功能”键即可对刀,调整参数、对刀、反复 即可迅速完成线径相关参数设定,在停机时按此键,刚进行参数更正、功能屏。 3.退出键:是对中央处理器恢复至出厂设定,一般在电脑死机或显示异常时使用。 四、显示画面说明 画面一: 1.程序:是指被加工线材的规格(包括线长、线头、线尾、剥头、剥尾、线径、退刀、速度 、定量、产量、延时等参数)。 A、程序00:调机专用程序,专供专业技术人员调整试机或低速剥线。 B、程序1-97:一般剥线使用,即前端剥皮、全长、后端剥皮。 C、程序98:专供节剥短线,即线长小于或等到于34mm时,必须使用98号程序进行 加工,适用手加工电子工业连接线。 D、程序99:专供中间剥线程序,最多可切剥5段。适用手灯饰、汽车、摩托车配线加
工。 2.线径:是指线材芯的相对直径。将此值调整至切刀切至线皮与线芯之间靠近铜线即可, 线径越大所设值越大,反之刚小。 3.线长:是指所需加工线的全长 4.线头:是指前端至剥皮处的长度,此时小数点出现,小数点分辨率为0.25mm。 5.剥头:是指前端剥皮所需剥开的长度,当剥头大大于或等于线头时为全剥。 6.线尾:是指线材后端至剥皮的长度,此时小数点出现,小数点分辨率为0.25mm。 7.剥尾:是指后端剥皮所需剥开的长度,当剥头大于或等于线头时为全剥,小于等于线头 时为半剥。 画面二: 1.速度:是指机器加工线材快慢,速度越快力矩越小,一般设定为7-8档,0档最慢,9 档最快,视线材而定。 2.退刀:是指切刀切下后回退的值,作用是辅助剥皮,当线材被准确切下后若剥不开皮, 则调大退刀即可,一般设定为1-10,线材皮越厚,退刀数值越大,反之刚越小。 3.定量、产量:定量是指加工一把线材设定的数量,产量是指机器当前生产的总产量。 4.中剥:当程序号为99时,才能设定中剥参数,中剥设定顺序必须由上而下,所对的线 材加工为从左至右,若设定中剥参数为0000,则表示无中剥动作,中剥前、中、后剥时可穿插中剥0000即空操作。 画面三: 1.线长修正:是对当前线长进行长度的调节,使用“加1”、“减1”键更正数值。 2.总量:是指本规格线材加工的总产量。 3.延时:是指一次定量完成后所需延迟的时间,时间到则自动运行,设为“0”时则关闭 延时功能,此时定量到机器不会自动运行,只能手动运行。
*********有限公司作业指导书 文件名称:全自动同轴电缆剥线机作业指导书 拟制: 文件编号: 批准: 一、目的 对BW -886+Q2全自动电脑剥线机规定操作步骤,注意事项、机器维护。使员工熟悉操作方法。 二、范围 适用于生产车间剥线设备。 三、职责 生产部门依照操作流程执行 四、基本要求: (一)电源: AC110V/220V 50/60Hz (二)气压:0.4~0.6Mpa (三)使用环境;本机须在通风良好环境下使用、 五、作业能力及范围: (一)、线材OD 限制:本机台最大作业外径为5.5mm,最小作业外径为1mm 。 (二)、作业时间:每一作业循环时间为6-8秒(长度100mm ),视作业线长度及作业方式而加长。 (三)、剥皮能力:总长最短至65mm (两端剥),最长可至99,999,9mm 。 左端剥皮最长40mm, 右端则不限。 版本 Rev 修改日期 Date 修改原因 Reason 修改内容概述 Amendment Contents 修改人 Amended by 核准 Approval 01 2016.08.01 首次发放
六、画面操作说明 1、主画面 2、参数设计 2.1 同轴线材设定(进入AB端设置): 2.1.1 剥皮设定(进入AB端设置画面) (1)B、A端设定:B端代表线材左端,A端代表线材右端。(2)线头长度:旋刀切割位置。 (3)拉皮长度:剥口位置剥出的长度。
(4)旋刀时间:旋刀切割时间(一般设置0.1-0.15之间)。 (5)旋刀外径:旋刀切割深度(数值越小,下刀越深)。 (6)剥刀外径:切刀下刀深度(数值越小,下刀越深)。 (7)剥皮位置:切刀下刀位置。 (8)余料切除:防止挂料开关(打开时,拉出长度要比旋刀位置大)。 (9)剥皮顺序:分层剥离的动作顺序。 (10)A→B:将右端所设定之内容(如切刀,V刀位置,外径等)全部复制到左端之内容。 (11)A<->B:将右端所设定之内容(如切刀,V刀位置,外径等)全部与左端对换。(12)B→A:将右端所设定之内容(如切刀,V刀位置,外径等)全部与左端对换。 (13)是否滑剥:滑剥是指拉出时V刀不退刀,依次加深拉出。 2.1.2参数设置画面 (1)总线长:线材总长。 (2)线材直径:线材外径 (3)出线长度:后轮排线长度,数值越大,距离越远。 (4)切断回退:切刀切后前轮往后退的距离(一般设置45) (5)前剥加压:A端剥线压力(为预防线材打滑而设置的功能,一般设置0.5-2 之间)。 (6)废料吹气:指剥皮时吹气时间数值越大吹气时间越久。建议设定0.05-0.2(此功能是为了防止废料拉出时附着在切刀上) (7)进线检测:此功能是为断线时报警开关之用 (8)旋刀方向:旋刀顺逆时针旋转方向(正为顺时针) (9)料嘴上下:导块上下开关(关闭时,导块不位移) (10)修正:线材总长修正(L大于设定值时设为负数,小余设定值时设为正数)。 (11)刀距修正:线材导体长度修正(A端大于设定值时设为正数,B端大于设定值时设为负数)。 (12)压线距离:在主画面夹线按下时滚轮夹线位置。 (13)后剥加压:B端剥线压力(为预防线材打滑而设置的功能,一般设置0.5-2之间)。 (14)开盖检测:主机开盖报警开关。
S W T系列 全自动电脑剥线机 使用说明书 瑞安市赛威特电子设备厂网址:https://www.doczj.com/doc/d36994878.html, Email:raswtdz@https://www.doczj.com/doc/d36994878.html,
适用范围 本厂生产的SWT系列全自动电脑剥线机适用于单股、多股导线的切断、剥头、剥尾、中间剥的加工,加工最大截面积0.1-4.5mm 2,切断最大长度为9999mm,剥头35mm,剥尾15mm。该机器主要适用于电子、电器、玩具、汽摩配等行业的线束加工。 重量:31KG 外形尺寸:390mm×350mm×255mm 功率:120 – 200W 显示方式:LCD液晶显示屏 切割长度:1mm – 9999mm 切割公差:0.002×L以内(L =切割长度) 剥离长度:0 – 35mm 切割线芯截面积:0.1 – 4.5mm2 导管最大直径:¢8 中间剥皮:10处剥 刀具材料:优质钨钢 剥线速度:2000 – 80000根/小时 驱动方式:两轮 调节速度:0最慢,9最快
安全使用注意事项 首先非常感谢您购买SWT系列全自动电脑剥线机!为了确保您能安全与正确地使用该机器,请在使用之前详细阅读本使用说明书。 一、电源适配器:AC 220–250V,50–60HZ,为了使机器工作电压稳定,敬请用 户选配电源稳压器,以避免电压过高而烧坏该机器。 二、使用时该机器应放置于平坦稳固的表面上操作,以免掉落损坏机器。 三、请勿在靠近电磁场较强的区域内使用该机器,以免对该机器产生干扰。 四、使用时不得在该机器上面放置任何物品,不得接近腐蚀性的化学物品,务必 保持工作环境干燥、通风、无灰尘,工作室温:0–35℃。 五、使用时该机器如果出现不理想的剥线效果或不同程度的故障,敬请阅读本使 用说明书中的故障及排除方法,如果仍无法解决,请拨打我们的技术服务电话咨询检修的方法,为了您的安全起见,请勿自行拆卸该机器进行检修。注:依照中华人民共和国相关的法律法规之规定,本使用说明书上的相关内容的解释权属本厂所有,如有变化恕不另行通知!手册版本号:V2.0。 目录
Creo2.0动态机构仿真操作手册 1 范围 本标准规定了Creo2.0动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 Creo2.0机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 1
图1-2 机构模块下的主界面图 图1-3 机构菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下: 设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。 齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现 有的齿轮副。 伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。 执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。 弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。 阻尼器:打开“阻尼器”对话框,使用此对话框可定义阻尼器,也可编辑、移除或复制现有的阻尼器。 力/扭矩:打开“力/扭矩”(对话框,使用此对话框可定义力或扭矩。也可编辑、移除或复制现有的力/扭矩负荷。 重力:打开“重力” 对话框,可在其中定义重力。 初始条件:打开“初始条件”对话框,使用此对话框可指定初始位置快照,并可为点、连接轴、主体或槽定义速度初始条件。 质量属性:打开“质量属性”对话框,使用此对话框可指定零件的质量属性,也可指定组件的密度。 拖动:打开“拖动”对话框,使用此对话框可将机构拖动至所需的配置并拍取快照。 连接:打开“连接组件”对话框,使用此对话框可根据需要锁定或解锁任意主体或连接,并运行组 件分析。 分析:打开“分析”对话框,使用此对话框可添加、编辑、移除、复制或运行分析。 回放:打开“回放” 对话框,使用此对话框可回放分析运行的结果。也可将结果保存到一个文件中、恢复先前保存的结果或输出结果。 测量:打开“测量结果”对话框,使用此对话框可创建测量,并可选取要显示的测量和结果集。也可以对结果出图或将其保存到一个表中。 轨迹曲线:打开“轨迹曲线”对话框,使用此对话框生成轨迹曲线或凸轮合成曲线 除了这些主要的菜单和工具外。还有几个零散的菜单需要注意。 2.1 【编辑】菜单 重定义主体:打开“重定义主体” 对话框,使用此对话框可移除组件中主体的组件约束。通过单击箭头选择零件后,对话框显示已经定义好的约束,元件和组建参照,设计者可以移除约束,重新指定元件或组件参照,如图1-6所示。 设置:打开“设置” 对话框,使用此对话框可指定"机械设计"用来装配机构的公差,也可指定在分析运行失败时“机械设计”将采取的操作。如是否发出警告声,操作失败时是否暂停运行或是继续运行等等,该配置有利于设计者高效率的完成工作。 3
动态机构仿真操作手册 1 范围 本标准规定了动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图 图1-2 机构模块下的主界面图 图1-3 机构菜单
图1-4 模型树菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下: 连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。 :打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。 打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复
全自动电脑剥线机 用户手册 温州兆庄自动化设备https://www.doczj.com/doc/d36994878.html, 二零一零年
目录 一、产品简介 (2) 二、产品外形 (2) 2.1 部件说明 (2) 三、产品技术指标 (3) 3.1 技术指标 (3) 四、运输和存储 (4) 五、操作说明 (5) 5.1 机械部分操作 (5) 5.1.1 机械调整 (5) 5.1.2 机械调整技术要点 (5) 5.2 控制系统操作 (6) 5.2.1 人机接口概述 (6) 5.2.2 参数输入 (7) 5.2.3 运行操作 (12) 六、常见问题及解答 (13) 6.1 使用过程中的注意事项 (13) 6.2 故障及解决方法 (13) 七、技术支持和维护.................................................................. 错误!未定义书签。
一、产品简介 全自动电脑剥线机是采用高速微处理器,与先进的运动控制技术相结合自主研发的具有完全知识产权的新一代线束加工设备。显示部分选用带触摸屏的240×128图型点阵液晶,参数的输入是5X3矩阵按键。人性化的设计,操作起来及其简单。产品适用于电线电缆、同轴电缆、护套线、排线的加工。加工出的线束,长度一致,外观漂亮,扭线效果佳。 二、产品外形 图2-1产品外形图 2.1 部件说明 (1)整直器:线束的校正装置,使线束垂直方向平直。 (2)进线轮压力调节钮:调节进线轮两轮之间的压力。使用时,先拔出来,再朝顺时针方向旋转是加大压力,逆时针方向旋转是减小压力。 (3)进线轮上升开关:逆时针旋转抬起进线轮,顺时针旋转下降进线轮。(4)进线轮间隙调节钮:往上旋转进线轮之间的间隙增大,往下旋转间隙减小。(5)刀架机构:切刀装置,线束的外皮切开,切断线由其完成。 (6)进线孔:线束经该孔穿入。 (7)进线轮:旋转时使线材前进后退,配合刀架进行拉线头外皮的动作。(8)导管:线材进入刀架前起导引作用;剥线尾时,导管上升,使线与正在加工的线束错位,以便去线尾外皮。 (9)出线轮上升开关:顺时针旋转抬起出线轮,逆时针旋转下降出线轮。(注意:其旋转方向与进线轮上升开关的方向恰好相反) (10)出线轮间隙调节钮:往上旋转出线轮之间的间隙增大,往下旋转间隙减小。(11)出线轮压力调节钮:调节出线轮两轮之间的压力。使用时,先拔出来,再朝逆时针方向旋转是加大压力,顺时针方向旋转是减小压力。注意:(其旋转方向与进线轮压力调节钮的方向恰好相反) (12)侦测有无线材之指示灯:功能设定中如果断线功能打开,无线材时该指示
主题全制动剥线机作业指导书文件编号:HX-SOP-03-001-01 版本:A0 文件发放/会签 项次日期版次承办单位承办人部级审核变更事项 1 2015-11-10 A0 江西华兴李玉龙金建刚新版发行 单位需求会签 会签意见 同意不同意品质部V 技术研发中心V PMC部V 生产制造部V 制定审核核准
主题全制动剥线机作业指导书文件编号:HX-SOP-03-001-01 版本:A0 1.0目的 如何使用全自动剥线机,提高生产效率。 2.0适用范围 剥各种规格线材的线。 3.0主要职责 3.1制造部:负责按标准作业等 3.2技术部:负责标准的制定和技术参考 3.3品质部:负责此规范的稽核设置参数等 4.0 操作界面介绍
主题全制动剥线机作业指导书文件编号:HX-SOP-03-001-01 版本:A0 5.0 操作流程 图片步骤作业手法 第一步1.插上室电电源(220V)。 2.打开电源开关 第二步1把所要剥线的线材穿过导直轮,再穿过压线轮进入线导管。 线材穿到此处就OK了。 2.调节压线轮,把线材压实即可。 第三步1.设置功能设置,设置成长线模式 2.说明:长线;剥线长度在40mm 以 上。 短线;剥线长度在40mm以 ·下。 第四步设置剥线设置: 1.按剥线设置按键,设置前剥,后剥,总长度,半剥,后剥,刀值,退刀,设置数据参照附表。 2.按确定键确认。
主题全制动剥线机作业指导书 文件编号:HX-SOP-03-001-01 版本:A0 第 五 步 1.待设置完成后,按试样键,查看 剥线设置是否合适。 2.确认后,按运行键即可。 3.剥完所需数量后,按停止键。 4.如遇不良情况,可以按急停键。 5.作业完成后,整理工作台面。 6.切断电源
本系统特点 1、采用最新的32位Cortex-M3内核处理器,运行速度为单周期 72M; 2、5路高达100K的脉冲输出,脉冲型式为“脉冲+方向”、集电 极开路输出; 3、7路高速输入点!响应时间小于2uS; 4、4路集电集开路输出,输出电流5A; 5、板上集成了标准的RS485通信接口,并配有Modbus RTU通信 协议,可以方便的与各种品牌的触摸屏通信,通信数据格式为38400、8、n、1; 6、板上已配置步进驱动器的驱动电源整流电路,可为驱动器提供 15A驱动电流,使机器的电路配线更简单;机器在停机状态下该整流电路停止输出;可以在不断电的情况下调整机械部分; 7、配有大容量存储器,可以同时保存100组参数,方便操作者操 作;
目录1.电气连接说明;2.操作说明; 3.通信协议介绍;4.裁线范例
一、电气连接说明 备注: 1、变压器T1推荐规格为220V/7.5V 10W; 2、变压器T2推荐规格为220V/18V、45V 3、电机驱动信号为脉冲+方向,最高输出频 率为100K,无需加限流电阻; 4、使用485通信总线,应保证同一条总线上 不应超过32台从机! 5、改变任何接线时应关闭电源,以防触电;
二、操作说明 控制面板图 本系统的操作介面由23只按键和一块192x64点阵的液晶显示屏组成,以下将介绍每个按键的功能: :在待机状态下,每短按一次,机器执行一单步,反复循环; 连继按下超过约0.5秒,机器将自动运行一循环;该按键 在调机时作用非常大; :在待机状态下,按下此键,机器开始工作; :在工作状态下,按下此键,机器将完成本次工作后停机; :在待机状态下,按下此键,机器将执行复位动作; 在工作状态下,按下此键,机器先停机,后再执行复位 动作; :在数据输入状态下按下此键,输入数字0;在待机状态 下按下此键,机器将进入剥线参数设置状态;
Creo2.0 动态机构仿真操作手册 1 范围 本标准规定了Creo2.0动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 Creo2.0机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 精选
图1-2 机构模块下的主界面图 图1-3 机构菜单 图1-4 模型树菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编 辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触 从动机构,也可编辑或删除现有的3D接触从动机构。 齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。 伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移 除或复制现有的伺服电动机。 执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。 弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。 阻尼器:打开“阻尼器”对话框,使用此对话框可定义阻尼器,也可编辑、移除或复制现有的阻尼器。 力/扭矩:打开“力/扭矩”(对话框,使用此对话框可定义力或扭矩。也可编辑、移除或复制现有的力/扭矩负荷。 重力:打开“重力” 对话框,可在其中定义重力。 初始条件:打开“初始条件”对话框,使用此对话框可指定初始位置快照,并可为点、连接轴、主体或槽定义速度初始条件。 质量属性:打开“质量属性”对话框,使用此对话框可指定零件的质量属性,也可指定组件的密度。 拖动:打开“拖动”对话框,使用此对话框可将机构拖动至所需的配置并拍取快照。 连接:打开“连接组件”对话框,使用此对话框可根据需要锁定或解锁任意主体或连接,并运行组件分析。 分析:打开“分析”对话框,使用此对话框可添加、编辑、移除、复制或运行分析。 回放:打开“回放” 对话框,使用此对话框可回放分析运行的结果。也可将结果保存到一个文件中、恢复先前保存的结果或输出结果。 测量:打开“测量结果”对话框,使用此对话框可创建测量,并可选取要显示的测量和结果集。也可以对结果出图或将其保存到一个表中。 轨迹曲线:打开“轨迹曲线”对话框,使用此对话框生成轨迹曲线或凸轮合成曲线 除了这些主要的菜单和工具外。还有几个零散的菜单需要注意。 2.1 【编辑】菜单 重定义主体:打开“重定义主体” 对话框,使用此对话框可移除组件中主体的组件约束。通过单击箭头选择零件后,对话框显示已经定义好的约束,元件和组建参照,设计者可以移除约束,重新指定元件或组件参照,如图1-6所示。 设置:打开“设置” 对话框,使用此对话框可指定"机械设计"用来装配机构的公差,也可指定在分析运行失败时“机械设计”将采取的操作。如是否发出警告声,操作失败时是否暂停运行或是继续运行等等,该配置有利于设计者高效率的完成工作。 精选