第七章 三维运动估计
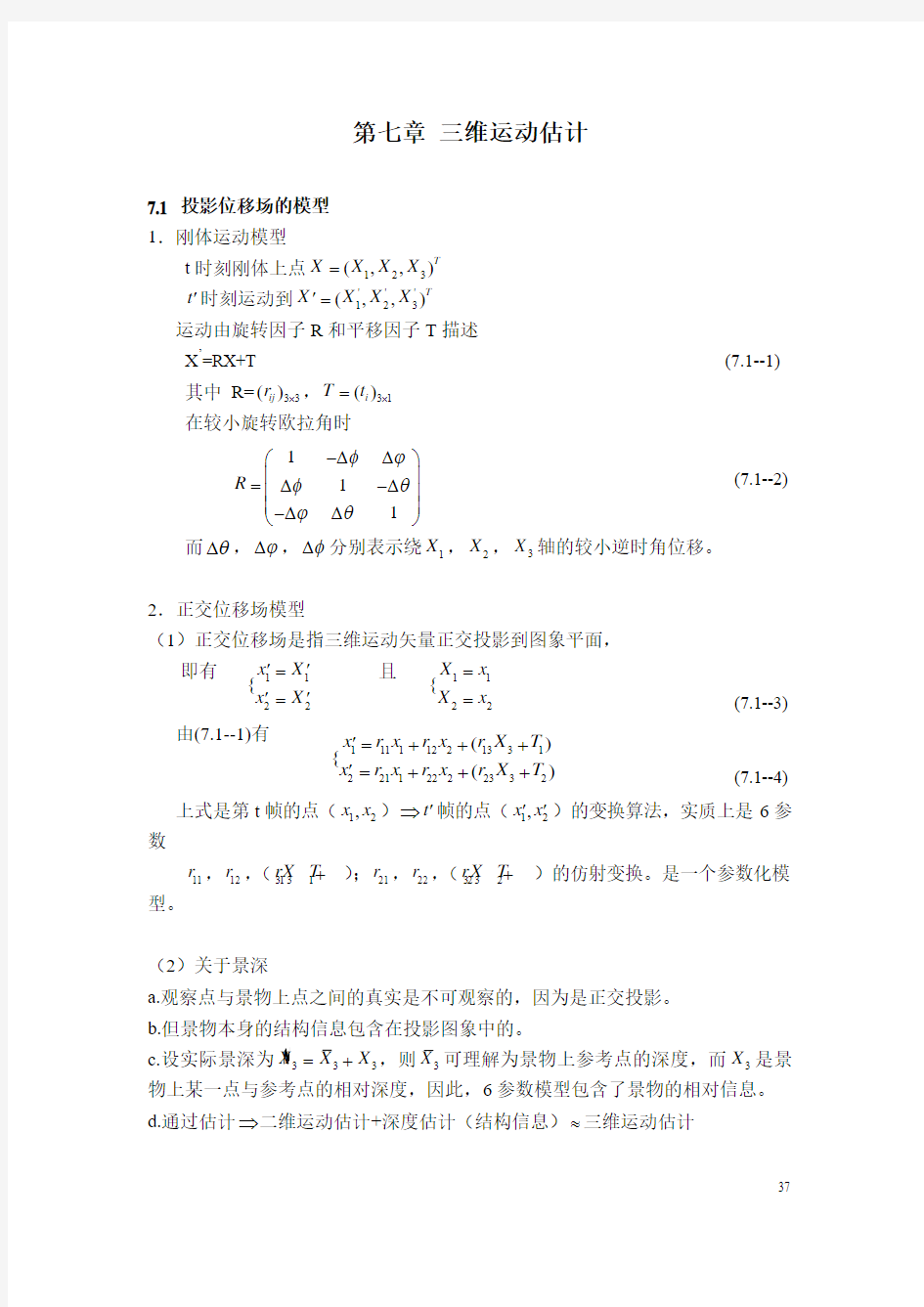
7.1 投影位移场的模型 1.刚体运动模型
t 时刻刚体上点123(,,)T X X X X =
t '时刻运动到''
'12
3(,,)T X X X X '= 运动由旋转因子R 和平移因子T 描述
X ’=RX+T (7.1--1) 其中 R=33()ij r ?,31()i T t ?= 在较小旋转欧拉角时
(7.1--2) 而θ?,??,φ?分别表示绕1X ,2X ,3X 轴的较小逆时角位移。
2.正交位移场模型
(1)正交位移场是指三维运动矢量正交投影到图象平面,
即有 且 (7.1--3) 由(7.1--1)有
(7.1--4) 上式是第t 帧的点(12,x x )?t '帧的点(1
2,x x '')的变换算法,实质上是6参数
11r ,12r ,(1331
rX T +);21r ,22r ,(2332rX T +)的仿射变换。是一个参数化模
型。
(2)关于景深
a.观察点与景物上点之间的真实是不可观察的,因为是正交投影。
b.但景物本身的结构信息包含在投影图象中的。
c.设实际景深为333X X X =+,则3X 可理解为景物上参考点的深度,而3X 是景物上某一点与参考点的相对深度,因此,6参数模型包含了景物的相对信息。
d.通过估计?二维运动估计+深度估计(结构信息)≈三维运动估计
1
11R φ?φθ?θ-???? ?=?-? ? ?-????
1122{x X x X ''=''=1122{X x X x ==1111122
133122112222332()
{()x r x r x r X T x r x r x r X T '=+++'=+++
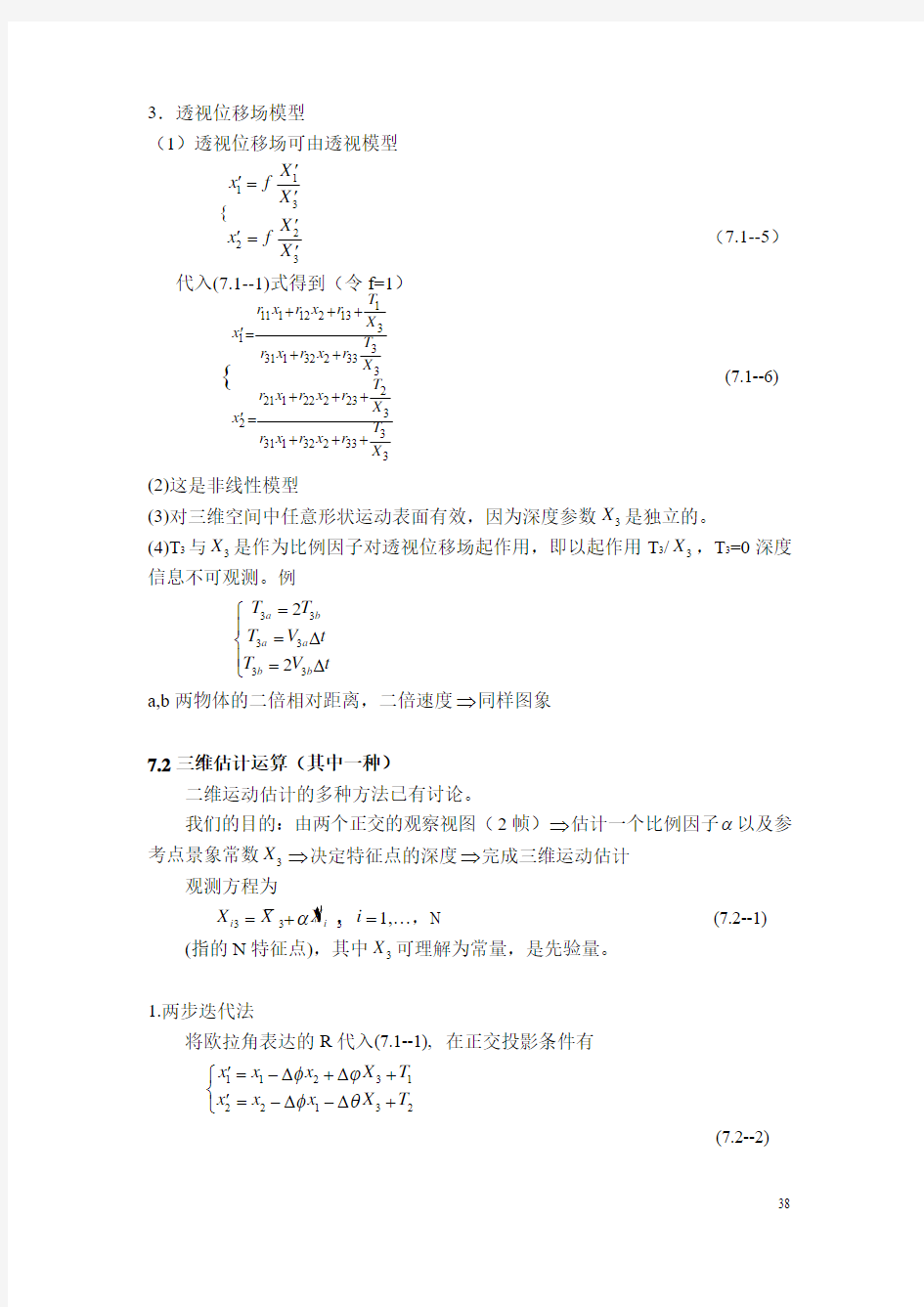
3.透视位移场模型
(1)透视位移场可由透视模型
(7.1--5)
代入(7.1--1)式得到(令f=1)
(7.1--6)
(2)这是非线性模型
(3)对三维空间中任意形状运动表面有效,因为深度参数3X 是独立的。 (4)T 3与3X 是作为比例因子对透视位移场起作用,即以起作用T 3/3X ,T 3=0深度信息不可观测。例
a,b 两物体的二倍相对距离,二倍速度?同样图象
7.2三维估计运算(其中一种)
二维运动估计的多种方法已有讨论。
我们的目的:由两个正交的观察视图(2帧)?估计一个比例因子α以及参考点景象常数3X ?决定特征点的深度?完成三维运动估计
观测方程为
333i i X X X α=+,i =1,…,N (7.2--1) (指的N 特征点),其中3X 可理解为常量,是先验量。 1.两步迭代法
将欧拉角表达的R 代入(7.1--1), 在正交投影条件有
(7.2--2)
113
223{
X x f
X X x f X ''='''='1
111122133
1
3
311322333
2
211222233
23
311322333{
T r x r x r X x T
r x r x r X T r x r x r X x T r x r x r X +++
'=+++++'=+++33333322a b
a a b
b T T T V t T V t
=??
=???=??1
12312
2132x x x X T x x x X T φ?φθ'=-?+?+??
'=-?-?+?
因此,在t 与t '帧之间,有5个全局运动参数θ?,??,φ?;1T ,2T 以及一个深度参数3X ,由于有3X ??,3X θ?项,因此为非线性的模型?也称双线性模型。
(7.1--8)式的求解分如下两个步骤 (1)估计5个运动参数
设有N 个(3N ≥)特征点,在t 帧为12(,)i i i X x x =,(7.2--1)式可变换为
(7.2--3) 由N 个特征点,可得到关于(θ?,??,φ?,1T ,2T )T 的2N 个方程,由最小二乘法求解(θ?,??,φ?,1T ,2T )T 的估计量。
注意3X 深度参数的估计可以由先验知识得到初始估计值,而且误差不能超过预定的范围?解的唯一性问题
(2)估计景深
当(θ?,??,φ?;1T ,2T )T 估计出来后。(7.2--1)又可写为
(7.2--4)
上式可估计出所有有关特征点的新的深度估计3i X ,i =1,…,N 算法可选择最小二乘法,显然,这一次的3i X 估计比先验初始值精确。 (3)上述步骤反复进行,直至估计量收敛?基本不变
(4)理论上N=3即可,但实质上需要多于3个以上特征点,有利于收敛。 (5)改进(修正的)算法,例如在3i X 的估计加上随机扰动。
2.透视模型法—同伦法 (1)偏振约束模型
X R X T '=+意味着矢量X ',T 和RX 是共平面的(X 与X '可能不共平面) 则有T RX ?正交于该平面;则
()0X T R X '??= (7.2--5) ?--叉积;?--点积
故有()0T X EX '= (7.2--6) 其中
321
1312212010001X X x x X X x x T T θ?φ??? ?? ?'--???? ?=?
? ?'-- ????? ?
?
??1121322
22x x x T X x x x T φ?φθ'-+?-?????= ? ?'--?--?????1
23324
563
100e e e T T E e e e T T R -????
? ?==- ? ? ? ?
E 的元素称为必要参数,i e 之间是非独立的。用33
X X '除(7.2--6)两边,在成像平面有
(7.2--7)
这是一个齐次方程,也称三维运动估计的偏振约束方程。
但线性方程:有解、无解和无穷多个解。因此,在i e 中令某一个为1,求解其8个系数。
(2)必要参数的估计 令91e =,由(7.2--7)式有
取t 与t '帧中的N (8N ≥)个对应特征点,即由最小二乘法统计出i e 来。注意
0T ≠,否则无法应用(7.1--11)式
(a) 对应N>8个时,可以优选最小范数解;即选择?e Ge =,且1e =(归一化)(7.1--14)。而
(7.1--15)
解与G 的最小特征跟有关。 (b) 对应点N<8时→同伦法
(c) 方程是欠定的,将(7.1--12)式中的E 阵分解为
()(
)
12
312
3?E e e e kT r kT r kT r ==??? (7.1--16)
i r ,i =1,2,3是R 的列矢量
k 表示平稳矢量的长度因子,?T
是沿T 方向的单位矢量
(3)由低噪声点及数据?E ,恢复R 和?T
的算法。
7.3三维平面情况
网格??
?→近似
曲面→分解为多个网格平面 1.特点
增加了约束条件
1231a X b X c X ++
= (7.3--1) 且()T a b c 是该平面的法向量
1122(1)01x x x E x ??
?''= ? ???[]()11
121212221
212
34567
81
T
x x x x x x x x x x x x e e e e e e e e ''''''?=-11
111112111211121212111211121212221211N N N N N N N N N N N N x x x x x x x x x x x x G x x x x x x x x x x x x ''''''????
=??''''''????
2.模型
(7.3--2) 其中
透视情况;其他情况(参数情况)
()111222333112233X X X X R X T a b c X X X X X X
X A X X X '?????? ? ? ?'=+ ? ? ? ? ? ?'??????'???? ? ?'?= ? ? ? ?
'????
1
234
567
8
9()a a a A a a a R T a b c a a a ?? ?
==+ ? ???
三维动画设计专业毕业实习报告 这是一篇由网络搜集整理的关于三维动画设计专业毕业实习报告的文档,希望对你能有帮助。 三维动画设计专业毕业实习报告(一) 即将面临毕业,学校为我们安排到了一家动漫公司实训,既然选择了动漫这个专业,就要好好去学,在大学里学的知识却不知道如何运用,因此我非常珍惜这次实习的机会,在有限的时间里加深对动画的了解,找出自身的不足。记述三维动画是一种非常时尚的行业,也是很新很有发展的一个专业,进入这个专业学习,需要多方面的知识结构,良好的美术基本功必不可少,同时还应通过大量练习,学习软件,努力掌握软件技术,和艺术结合,才能做出好的动画。在学校的学习的时候学习的是一些艺术类修养和专业理论,实际软件学习不够多也不够全面,这样多多少少都有点纸上谈兵,实际动手能力还是有一定的局限性。 实习的目的有三点 1、熟悉本专业的工作性质,不断增强综合素质。 2、巩固和深化所学理论知识,培养谦虚、严谨、实事求是的科学作风,为从实习生向职业工作者过渡奠定扎实的理论与实践基础。 3、掌握专业基本工作内容、方法和专业技能,通过实践不断增强自学与独立思考、分析和解决问题的能力。在一开始的实训中我们首先学习了人物的行走,虽然看着很普通,但其实行走是很复杂的,不仅仅是做脚的移动越过地面,还有臀部,脊骨,胳膊,肩膀和头都同步移动来维持平衡。虽然很复杂,如果你按关节来把这些动作分解,行走的结构就很清楚了。
其中有以下一些关键点 1、腿和脚脚和腿推进身体向前。为了保持人物看上去自然,你应该始终让关节保持轻微的弯曲,即使在腿完全伸展的情况。第2个一半是对第一个的镜像。如果它们不同的话,人物会出现跛行。 2、臀部、脊骨和肩膀的动作,身体重力的中心在臀部。当身体剩余部分动作的时候,所有的平衡从这里开始。在行走中,最好能把臀部的动作考虑成两个分开的,重叠的旋转从前面看,脊骨是相对直着的,但是从上面你可以看到臀部和肩膀向相反的方向扭曲来维持平衡。 3、胳膊的动作,除非人物用到胳膊,否则它们通常会很松弛的垂在身体两侧。在这种情况下,它们一般表现的像钟摆一样,在臀部和肩膀后面拖曳几帧。即使在完全伸展的时候,试着保持胳膊在肘部稍微弯曲一点。这能使他们看上去自然。 4、头的运动,在一个标准的行走中,头一般保持水平,眼睛集中看人物即将去的地方。然后它将轻微向四周跳动来保持平衡。如果人物很兴奋,这个弹跳将更明显。对于悲伤的人物,头也会低垂着,或者如果场景需要的话就向周围看。在实训过程中,我学会了如何调动作。在调动作的过程中,我又进一步的掌握了各种工具的功能及运用。当然,也遇到了一些难以解决的问题。后来通过请教同学得以解决。想要真正做好一件事不容易。这是我从中的体会之一。一个团体的合作非常重要,也是项目取得成功的关键。一个属于团体的事单靠一个人来完成是一件艰巨又辛苦的事。所以说责任心相当重要。通过实训,认识了自己的很多不足,知道了自己知识的薄弱。这是体会之二。必须要努力学习,才能更好地面对未来。这次实习的收获对我来说有不少,我自己感觉在知识、技能、
高中物理运动学公式总结 The Standardization Office was revised on the afternoon of December 13, 2020
高中物理运动学公式总结 一、质点的运动——直线运动。 1)匀变速直线运动。 1、平均速度;t x V =定义式平均速率;t s V = 2、有用推理ax Vo Vt 222=- 3、中间时刻速度;202V Vt V Vt +==平 4、末速度Vt=V0+at 5、中间位置速度2 2220Vt V Vx += 6、位移 t 2t 2a t 0t t 2V V V s =+==平 7、加速度t V Vt a 0 +=(以V0为正方向,a 与V0同向[加速]a ?0,反向则a <0) 8、实验推论;S1-S2=S3-S2=S4-S3= =?x=a t 2 9、初速度为0n 个连续相等的时间内s 的比;s1:s2:s3 :Sn=1:3:5 :(2n-1) 10、初速度为0的n 个连续相等的位移内t 之比; t1:t2:t3 :tn=1:(12-0):(23-): :(1--n n ) 11、a=t n m Sn Sm 2--(利用上个段位移,减少误差---逐差法) 12、主要物理量及单位:初速度V0= s m ;加速度a=s m 2;末速度Vt= s m 1s m =h k m 注; 1平均速度是矢量, 2物体速度大,加速度不一定加大 2)自由落体运动 1初速度V0=0 2末速度Vt=gt 23下落高度)位置向下计算从00(22V g h t = 4推论t 2V =2gh 注; 1自由落体运动是初速度为0的匀加速直线运动,遵循匀变速直线运动规律。
课程设计任务书
目录 1 绪论 (1) 1.1CATIA V5软件介绍 (1) 1.2ADAMS软件介绍 (1) 1.3S IM D ESIGNER软件介绍 (2) 1.4本次课程设计的主要内容及目的 (2) 2 曲柄连杆机构的建模 (3) 2.1活塞的建模 (3) 2.2活塞销的建模 (5) 2.3连杆的建模 (5) 2.4曲轴的建模 (6) 2.5汽缸体的建模 (8) 3 曲柄连杆机构的装配 (10) 3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10) 4 曲柄连杆机构导入ADAMS (14) 4.1曲柄连杆机构各个零部件之间运动副分析 (14) 4.2曲柄连杆机构各个零部件之间运动副建立 (14) 4.3曲柄连杆机构导入ADAMS (16) 5 曲柄连杆机构的运动学分析 (17) 结束语 (21) 参考文献 (22)
1 绪论 1.1 CATIA V5软件介绍 CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。 由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。 CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。 1.2 ADAMS软件介绍 ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、
学校代码10126 学号00947054 分类号密级 本科毕业论文(设计)
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
运动学基本公式运用 一、选择题 1、做匀加速直线运动的物体的加速度为3 m/s 2,对任意1 s 来说,下列说法中不正确的是( ) A.某1 s 末的速度比该1 s 初的速度总是大3 m/s B.某1 s 末的速度比该1 s 初的速度总是大3倍 C.某1 s 末的速度比前1 s 末的速度大3 m/s D.某1 s 末的速度比前1 s 初的速度大6 m/s 2、a 、b 两个物体从同一地点同时出发,沿同一方向做匀变速直线运动,若初速度不同,加速度相同,则在运动过程中( ) ①a 、b 的速度之差保持不变 ②a 、b 的速度之差与时间成正比 ③a 、b 的位移之差与时间成正比 ④a 、b 的位移之差与时间的平方成正比 A.①③ B.①④ C.②③ D.②④ 3、一小球从A 点由静止开始做匀变速直线运动,若到达B 点时速度为v ,到达C 点时速度为2v ,则AB ∶BC 等于( ) A.1∶1 B.1∶2 C.1∶3 D.1∶4 4、物体的初速度为v 0,以加速度a 做匀加速直线运动,如果要它的速度增加到初速度的n 倍,则物体的位移是( ) A.a v n 2)1(2 02- B.a v n 22 02 C.a v n 2)1(2 0- D.a v n 2)1(2 02- 5、做匀加速运动的列车出站时,车头经过站台某点O 时速度是1 m/s ,车尾经过O 点时的速度是7 m/s ,则这列列车的中点经过O 点时的速度为( ) A.5 m/s B.5.5 m/s C.4 m/s D.3.5 m/s 6、一物体以5m/s 的初速度、大小为2m/s 2 的加速度在粗糙的水平面上匀减速滑行,在4s 内通过的路程为( ) A 、4m B 、6.25m C 、16m D 、以上答案都不对 7、汽车刹车后做匀减速直线运动,最后停下来,在刹车过程中,汽车前半程的平均速度与后半程的平均速度之比是( ) A. 1:)12(+
三维动画毕业设计论文 摘要:本文从三维动画短片中的视觉效果出发,对动画短片中涉及的三维动画制作,后期特效制作方法进行了详细的阐述,并解析归纳了适用于短片动画的,相关三维动画及其后期处理的制作方法,总结出为达到该动画短片视觉效果可行的制作解决方案。结合该短片的特点,提出了为达到导演预期效果使用到的处理方法。 关键词:三维动画,后期合成,制作方法 3D Animation Short Subject THE NIGHT PARTY ABSTRACT:This text is from the 3D animation short subject THE NIGHT PARTY of the visual effect set out, expect the special effect creation's method to carry on to elaborate in detail towards involving in the animation short subject of 3D animation creation, behind, and analyzed to induce to be applicable to a short subject animation of, related and 3D animation and afterward expect the creation method for handle, tally up for attain that visual effect of the animation short subject viable creation https://www.doczj.com/doc/d49444154.html,bine the characteristics of that short subject, put forward for attain treatment that direct expectation effect's usage. KEY WORDS: 3D animation, expect to synthesize behind, create a method 1 《夜店惊魂》的视觉效果目标 1.1 影片视觉风格定位 这部三维动画短片《夜店惊魂》,作为毕业设计,我们给自己制定了较高的影片质量目标。为了能形成统一的,有性格的动画短片,我们在做一切动作之前先给影片做一个整体的风格定位。经过多种风格的实验选择,我们最终确定了这种诡异又天真,邪恶又可爱的整体定位。对美与丑的划分淡化,一切都是合理又和谐的,善与恶总是这样和谐的统一的,表面的善恶也只是一种形式。[1] 1.2 参考与借鉴动画大片 我们在确定影片风格的时候非常庆幸的也看到了西方也有一些类似
匀变速直线运动的规律及方法 2.【2016·全国新课标Ⅲ卷】一质点做速度逐渐增大的匀加速直线运动,在时间间隔t 内位移为s ,动能变为原来的9倍。该质点的加速度为 A . 2 s t B . 2 32s t C . 2 4s t D . 2 8s t 【答案】A 【解析】设初速度为1v ,末速度为2v ,根据题意可得22 1211922 mv mv ? =,解得213v v =,根据0+v v at =,可得113+v v at =,解得12at v = ,代入2112s v t at =+可得2s a t =,故A 正确。 8.(多选)对于如图所示的情境,交通法规定“斑马线礼让行人”,否则驾驶员将受到罚款200元扣除3分的处罚。若以 匀速行驶的汽车即将通过路口,有行人正在过斑马线,此时汽车的前端距停车线12m ,该车减 速时的加速度大小为 ,下列说法中正确的是( ) A. 在距停车线 处才开始刹车制动,汽车前端恰能止于停车线处 B. 驾驶员立即刹车制动,则至少需汽车才能停止 C. 若经后才开始刹车制动,汽车前端恰能止于停车线处 D. 若经 后才开始刹车制动,汽车前端恰能止于停车线处 【来源】湖南省(长郡中学、株洲市第二中学)、江西省(九江一中)等十四校2018届高三第一次联考物理试题 【答案】 BC 【解析】AB 、若汽车做匀减速运动,速度减为零的时间为 ,在t 时间内运动过的位移为: ,故A 错误;B 正确; CD 、若车恰好停在停车线处,则匀速运动的时间为 ,故C 正确;D 错误; 综上所述本题答案是:BC 10.ETC 是日前世界上最先进的路桥收费方式,它通过安装在车辆挡风玻璃上的车载电子标签与设在收费站ETC 通道上的微波天线进行短程通信,利用网络与银行进行后台结算处理,从而实现车辆不停车就能支付路桥费的目的.2015年我国ETC 已实现全国联网,大大缩短了车辆通过收费站的时间.假设一辆汽车以10m/s 的速度驶向收费站,若进入人工收费通道,它从距收费窗口20m 处开始减速,至窗口处恰好停止,再用10s 时间完成交费;
人体运动学考试重点 第一章总论 1、人体动力学概念(8):是运用力学的原理与方法研究人体在运动状态下各器官系统形态结 构与功能活动变化规律及其影响的一门学科。是多门学科之间相互交叉与渗透的科学。 是研究人体活动科学的领域。是通过位置、速度、加速度等物理量描述和研究人体和器械的位置随时间变化的规律或在运动过程中所经过的轨迹,而不考虑人体和器械运动状态改变的原因。 2、人体重心:人体重心一般在身体正中面上第三骶椎上缘前方7cm处。由于性别、年龄、 体型不同,人体重心略有不同。一般男子中心比女子高,自然站立时,男子重心高度大约是身高的56%,女子大约是身高的55%,这是因为女子骨盆较大的原因。 3、人体解剖参考轴与面(14): 轴:冠状横轴,垂直纵轴,矢状轴 面:水平面,与地面平行,把人体分成上下两部分 冠状面,把人体分成前后两部分 矢状面,把人体分成左右两部分 4、人体关节的运动形式(15): 屈曲与伸展,主要以横轴为中心,在矢状面上的运动 内收与外展,主要以矢状轴为中心,在冠状面上的运动 内旋与外旋,主要以纵轴为中心,在水平面上的运动 (前臂和小腿有旋前和旋后运动,足踝部还有内翻和外翻运动) 6、杠杆的分类(17):三类 第1类杠杆,又称平衡杠杆,支点位于力点和阻力点中间 第2类杠杆,又称省力杠杆,其阻力点在力点和支点的中间,可用较小的力来克服较大的阻力 第3类杠杆,又称速度杠杆,力点在阻力点和支点之间,如使用镊子 第二章骨骼肌肉系统运动学 *第一节骨运动学 1、骨运动学概念(22): 正常成年人人体共有206块骨 2、骨的功能(27):(疑问答题) 1)力学功能 a 支撑功能,骨是全身最坚硬的组织,对肢体起着支撑作用,并负荷身体自身的重 量及附加的重量,如脊柱、四肢 b 杠杆功能,运动系统的各种机械运动都是在神经系统的支配下,通过骨骼肌的收 缩、牵拉骨围绕关节产生的。骨在运动中发挥着杠杆功能和承重作用 c 保护功能,某些骨按一定的方式互相连接围成体腔或腔隙来保护内在组织和器 官,如颅腔保护脑 2)生理学功能 a 钙磷储存功能与物质代谢功能 b 造血功能和免疫功能 第二节*肌肉运动学
毕业设计(论文) 基于Pro/E的鼠标三维建模设计 系别:机械与电子工程系 专业(班级):09级机制本2班 作者(学号):李亮(50901012023) 指导教师:王贤才(讲师) 完成日期: 2013年5月20日 蚌埠学院教务处制
目录 中文摘要 (1) Abstract (2) 1绪论 (3) 1.1国内外发展状况 ............................................................................................... (3) 1.1.1 本课题研究的目的及意义 (3) 1.1.2 鼠标技术的现状和发展趋势 (3) 1.1.3 主要技术指标 (4) 1.2研究内容 (4) 1.3本章小结 (4) 2鼠标外形设计 (5) 2.1鼠标的结构分析 (5) 2.2鼠标的主要零件的三维造型 (5) 2.2.1 鼠标底壳 (5) 2.2.2 鼠标上壳 (14) 2.2.3 鼠标左右键 (20) 2.2.4 鼠标滚轮 (22) 2.2.5 定位销 (24) 2.3鼠标零件装配 (24) 2.4分解视图 (27) 3 模具设计 (28) 3.1鼠标上壳模具组件的设计 (28) 3.1.1 调入模型 (28) 3.1.2 设置模型收缩率 (28) 3.1.3 创建模具工件 (29) 3.1.4 创建分型曲面 (30) 3.1.5 分割模具体积块 (32) 3.1.6 分割后模体积块 (33) 3.1.7 抽取模具元件 (36) 3.1.8 模具元件开模演示 (36)
本文总结 (38) 致谢 (39) 参考文献 (40)
学生姓名年级授课时间教师姓名课时 教学目标掌握匀变速运动位移与时间的关系并运用(知道其推导方法);掌握位移与速度的关系并运用。重点难点表达式:x = v0 + at2/2、v2 - v02 = 2ax .运用公式解决具体问题。 自由落体运动 对于自由落体运动,我们有哪些方法来获得(测量到)它的运动信息? 利用打点计时器纸带法。 实验(记录自由落体的运动信息) 分析实验结果: 思考 1、位移与时间的关系? 2、速度如何算?速度与时间的关系? 3、加速度如何算?加速度与时间的关系? 作业 教学效果/ 课后反思 学生自评针对本堂收获和自我表现(对应指数上打√) ①②③④⑤⑥⑦⑧⑨⑩ 签名
2 gt v t = 自由落体运动规律的公式: 221gt s = gs v t 22= g :自由落体的加速度,重力加速度 说明:在同一地点,从同一高度同时自由下落的同物体,下落快慢相同,同时到达地面。 ①定义:在同一地点,做自由落体运动的物体均具有相同的加速度,这个加速度叫 自由落体加速度,也叫重力加速度,通常用g 表示。 ②方向:竖直向下,它的标准值:g=9.8m/s 2 ③经过对不同地区g 值的精确测量,可以发现地球上不同地方g 值不同。 应用: 1、 一个小球在离地面200米处以Vo 的速度向上运动,9秒末的速度大小是2Vo,求几秒后落 地? 2.一条铁链长5米,铁链上端悬挂在某一点,放开后让它自由下落,铁链经过悬点正下方 25米处某一点所用的时间是多少。(取g=10m/s) 3.一物体从某一高度自由下落,经过一高度为2米的窗户用时间0.4秒,g 取10m/s.则物体 开始下落时的位置距窗户上檐的高度是多少米。 4、有两个小球,一个小球从屋顶往下放,另一个小球在距离屋顶b 米处,当屋顶的小球下 落到a 米时,开始放另一个小球,最后两个小球同时落地。求屋的高度 5、一物体自由下落,先后经过A.B.C 三点,经过ab 和bc 相隔时间相等,已知ab=23m,bc=33m, 求物体开始下落点离A 点的高度.
黑龙江护理高等专科学校 2015~2016学年第二学期 2015级康复治疗技术专业期末考试试卷(A) 一、名词解释(每题4分,共20分) 1、 平衡角(稳定角) 2、 向心收缩 3、 肩肱节律 4、 牵张反射 5、 人体运动分析 二、填空题(每题1分,共30分) 1、 人体步行时的运动形式包括 、 、 、 。 2、 力量训练的原则有 、 、 、 。 3、 表示运动强度的常用指标有 、 、 。 4、 制定运动处方应遵循的原则有 原则、 原则、 原则与 原则。 5、 关于心指数,人体安静时, 与 呈线性关系,与 、 不成比例 6.状态反射包括 反射与 反射 7、 姿势的方向性就是 与 间适当关系的能力。 8、 步态控制的三个任务就是 、 与 。 9、 肌筋膜包括 、 与 ,就是与肌纤维 的弹性成分。 三、单项选择题,请把正确的选项填在括号内(每题1分,共20分) 1、 屈伸运动就是指( ) A 、环绕冠状轴在矢状面上的运动 B 、 环绕矢状轴在冠状面上的运动 C 、环绕垂直状轴在水平状面上的运动 D 、 环绕矢状轴在水平状面上的运动 E 、环绕垂直轴在矢状面上的运动 2、 下蹲过程中,下肢处于封闭运动链,因有 ( ) A 、髋、膝与踝关节共同活动 B 、仅髋关节活动 C 、仅膝关节活动 D 、仅踝关节活动 E 、 仅肢体活动 3、 力系平衡的充分必要条件就是( ) A 、合力、合力矩为零 B 、 合力为零、合力矩大于零 C 、合力矩为零、合力大于零 D 、多个力大小相等、方向相反 E 、二力大小相等、方向相同 4、 刚体角速度的大小与方向对时间变化率的物理量指的就是( ) A 、角速度 B 、角加速度 C 、角位移 D 、角动量 E 、角冲量 5、 运动神经元发放的冲动频率高时( ) A 、肌的伸展性增加 B 、肌的收缩力降低 C 、肌的弹性增加 D 、肌的粘滞性增加 E 、募集的运动单位多 6、 骨骼肌收缩起到缓冲、制动、减速与克服重力作用的属于( ) A 、 向心收缩 B 、 离心收缩 C 、拉长-缩短收缩 D 、 等动收缩 E 、等速运动 7、 当上臂上举150°,盂肱关节运动约就是( ) A 、80° B 、 90° C 、 60° D 、 70° E 、100° 8、 限制髋关节过伸的组要结构就是( ) A 、 髋臼 B 、 关节囊 C 、耻股韧带 D 、坐股韧带 E 、髋股韧带 9、 肌自身的形态结构与神经调节能力两个方面就是力量素质的( ) A 、生理基础 B 、解剖基础 C 、物理基础 D 、生化基础 E 、组织结构 10、下列哪项运动属于静力性力量训练( ) A 、引体向上 B 、俯卧撑 C 、蹲马步 D 、仰卧起坐 E 、杠铃 11、运动训练使心泵功能提高,主要表现为( ) A 、心房舒张末期容积增加 B 、心室舒张末期容积增加 C 、心房收缩末期容积增加 D 、心室收缩末期容积增加 E 、心肌收缩力增加
三维动画设计专业毕业实习报告 毕业季即将来临,在此,为各位就要毕业的三维动画设计专业的小伙伴们送来了毕业实习报告,供大家参考,祝大家顺利毕业。 三维动画设计专业毕业实习报告(一) 即将面临毕业,学校为我们安排到了一家动漫公司实训,既然选择了动漫这个专业,就要好好去学,在大学里学的知识却不知道如何运用,因此我非常珍惜这次实习的机会,在有限的时间里加深对动画的了解,找出自身的不足。记述三维动画是一种非常时尚的行业,也是很新很有发展的一个专业,进入这个专业学习,需要多方面的知识结构,良好的美术基本功必不可少,同时还应通过大量练习,学习软件,努力掌握软件技术,和艺术结合,才能做出好的动画。在学校的学习的时候学习的是一些艺术类修养和专业理论,实际软件学习不够多也不够全面,这样多多少少都有点纸上谈兵,实际动手能力还是有一定的局限性。 实习的目的有三点 1、熟悉本专业的工作性质,不断增强综合素质。 2、巩固和深化所学理论知识,培养谦虚、严谨、实事求是的科学作风,为从实习生向职业工作者过渡奠定扎实的理论与实践基础。
3、掌握专业基本工作内容、方法和专业技能,通过实践不断增强自学与独立思考、分析和解决问题的能力。在一开始的实训中我们首先学习了人物的行走,虽然看着很普通,但其实行走是很复杂的,不仅仅是做脚的移动越过地面,还有臀部,脊骨,胳膊,肩膀和头都同步移动来维持平衡。虽然很复杂,如果你按关节来把这些动作分解,行走的结构就很清楚了。 其中有以下一些关键点 1、腿和脚脚和腿推进身体向前。为了保持人物看上去自然,你应该始终让关节保持轻微的弯曲,即使在腿完全伸展的情况。第2个一半是对第一个的镜像。如果它们不同的话,人物会出现跛行。 2、臀部、脊骨和肩膀的动作,身体重力的中心在臀部。当身体剩余部分动作的时候,所有的平衡从这里开始。在行走中,最好能把臀部的动作考虑成两个分开的,重叠的旋转从前面看,脊骨是相对直着的,但是从上面你可以看到臀部和肩膀向相反的方向扭曲来维持平衡。 3、胳膊的动作,除非人物用到胳膊,否则它们通常会很松弛的垂在身体两侧。在这种情况下,它们一般表现的像钟摆一样,在臀部和肩膀后面拖曳几帧。即使在完全伸展的时候,试着保持胳膊在肘部稍微弯曲一点。这能使他们看上去自然。 4、头的运动,在一个标准的行走中,头一般保持水平,眼睛集中看人物即将去的地方。然后它将轻微向四周跳动来保持平衡。如果人物很兴奋,这个弹跳将更明显。对于悲伤的人物,头也会低垂着,或者如果场景需要的话就向周围看。在
匀变速直线运动速度与时间关系练习题 1、物体做匀加速直线运动,已知加速度为2m/s2,那么() A.在任意时间内,物体的末速度一定等于初速度的2倍 B.在任意时间内,物体的末速度一定比初速度大2m/s C.在任意一秒内,物体的末速度一定比初速度大2m/s D.第ns的初速度一定比第(n-1)s的末速度大2m/s 2、物体做匀加速直线运动,初速度v0=2m/s,加速度a=0.1m/s2,求(1)第3s末的速度? (2)5s末的速度? 3、质点作匀减速直线运动,加速度大小为3m/s2,若初速度大小为20m/s,求经4s质点的速度? 4、质点从静止开始作匀变速直线运动,若在3s内速度变为9m/s,求物体的加速度大小? 5、飞机以30m/s的速度降落在跑道上,经20s停止下来,若加速度保持不变,则加速度大小是? 6、质点作初速度为零的匀变速直线运动,加速度为3m/s2,则(1)质点第3s的初速度和末速度分别为多少? 7、汽车在平直的公路上以10m/s作匀速直线运动,发现前面有情况而刹车,获得的加速度大小为2m/s2,则: (1)汽车经3s的速度大小是多少? (2)经5s汽车的速度是多少? (3)经10s汽车的速度是多少? 8、质点从静止开始作匀加速直线运动,经5s速度达到10m/s,然后匀速度运动了20s,接着经2s匀减速运动到静止,则质点在加速阶段的加速度大小是多少?在第26s末的速度大小是多少?
9、质点在直线上作匀变速直线运动,若在A点时的速度是5m/s,经3s到达B点速度是14m/s,若再经4s到达C点,则在C点的速度是多少? 10、一物体做直线运动的速度方程为v t=2t+4. (1)说明方程中各字母或数字的物理意义. (2)请画出物体运动的v-t图象. 11、一质点从静止开始以1m/s2的加速度匀加速运动,经5s后作匀速运动,最后2s的时间使质点匀减速到零,则质点匀速运动的速度是多大?减速运动时的加速度是多大?从开始运动到静止的平均速度是多少?
高中物理运动学公式总结 一、质点的运动——直线运动。 1)匀变速直线运动。 1、平均速度; t x V = 定义式平均速率; t s V = 2、有用推理ax Vo Vt 22 2 =- 3、中间时刻速度;2 2V Vt V Vt += =平 4、末速度Vt=V0+at 5、中间位置速度2 2 2 2 Vt V Vx += 6、位移 t 2t 2 a t 0t t 2 V V V s = +==平 7、加速度t V Vt a 0 += (以V0为正方向,a 与V0同向[加速]a ?0,反向则a <0) 8、实验推论; S1-S2=S3-S2=S4-S3= =? x=a t 2 9、初速度为0n 个连续相等的时间内s 的比;s1:s2:s3 :Sn=1:3:5 :(2n-1) 10、初速度为0的n 个连续相等的位移内t 之比; t1:t2:t3 :tn=1:(12-0):(23- ): :( 1-- n n ) 11、a= t n m Sn Sm 2 --(利用上个段位移,减少误差---逐差法) 12、主要物理量及单位:初速度V0=s m ;加速度a=s m 2 ;末速度Vt= s m 1 s m =3.6 h km 注; 1平均速度是矢量, 2物体速度大,加速度不一定加大 2)自由落体运动 1初速度V0=0 2末速度Vt=gt 23下落高度 ) 位置向下计算 从00(2 2 V g h t = 4推论t 2 V =2gh
注; 1自由落体运动是初速度为0的匀加速直线运动,遵循匀变速直线运动规律。 2a=g=9.8s 2 m ≈10s 2 m (重力加速度在赤道附近较小,在高山处比平底小,方向竖直向下) 3)竖直上抛运动 1位移S=V o t- 22 gt 2末速度Vt=V o-gt 3有理推论0 2 2 V Vt -=-2gs 4上升最大高度H m= g Vo 22 (从抛出到落回原位置的时间) 5往返时间g t Vo 2 2= 注; 1全过程处理:是匀减速直线运动,以向上为正方向,加速度取负值。 2分段处理:向上为匀减速直线运动,向下为自由落体运动,具有对称性。 称性上升与下落过程具有对 3:1如在同点,速度等值反向。 2上升过程经过两点所用时间与下落过程经过这两点所 用时间相等。 物理规律汇总 1)相互作用力 1重力 【1】方向竖直向下,但不一定与接触面垂直,不一定指向地心。(除赤道与两级) 【2】重力是由地球的引力而产生,但重力≠引力(除两级) 2弹力 【1】绳子的拉力方向总是沿着绳,且指向绳子收缩的方向。、 【2】同一根绳子上的力相同。 【3】杆的力可以是拉力,也可以是推力。方向可以沿各个方向。 3摩擦力 【1】摩擦力不一定是阻力,也可以使动力。 【2】受滑动摩擦力的物体也可能是静止的。 【3】受静摩擦力的物体也可能是运动的。 2)牛顿运动定律 1力是改变物体运动状态的原因, 2力是产生加速度的原因, 3物体具有加速度,则物体一定具有加速度,物体具有加速度,则一定受力。 4质量是惯性大小的唯一量度, 5物体具有向下的加速度时,物体处于失重状态, 6物体具有向上的加速度时,物体处于超重状态。
运动学的基本概念 一、质点 1.理想模型 用来代替物体的有质量的点叫质点.是理想化的物理模型. 2.视为质点的条件 实际物体可视为质点的条件:①物体的形状、大小对问题的影响可忽略不计;②物体做平动;③物体虽有转动,但因转动而引起的物体部分差异对所研究的问题不起重要作用.质点是有质量的点的科学抽象,与几何中的点不是一回事. 1.做下列运动的物体,能当做质点处理的是() A.自转中的地球 B.旋转中的风力发电机叶片 C.匀速直线运动的火车 D.在冰面上旋转的花样滑冰运动员 2.关于质点,下列说法正确的是() A.研究刘翔在110 m栏比赛中的过杆技术是否合理时,可以将刘翔看做质点 B.陈中和主教练在奥运会女排决赛中,在战术板上布置队员怎样跑位时,能把女排队员看成质点 C.研究奥运会跳水冠军田亮的跳水动作时,能把他看成质点 D.研究乒乓球比赛中打的弧圈球时,能把乒乓球看做质点 3.子弹沿水平方向射出,如果要计算子弹从枪口飞到靶心所需时间,能否把子弹看做质点?如果要计算子弹穿过一张薄纸所需的时间,能否把子弹看做质点? 二、位置、位移、路程 1.位置
质点的位置可以用规定的坐标系中的点表示.在一维、二维、三维的坐标系中分别表示为S(x)、S(x,y)、S(x,y,z). 2.位移 物体位置的变化,用始位置指向末位置的有向线段表示.位移是矢量,国际单位是“米”.位移的大小与路径无关,位移的方向是由初位置指向末位置.位移的方向不一定是质点运动的方向. 3.路程 路程是物体经过的实际路线的长度.路程是标量.路程不小于位移,当物体做单向无往复的直线运动时位移的大小才等于路程. 三、时刻与时间 1.时刻指某一瞬时,体现在时间轴上为某一点. 2.时间指两时刻间隔,体现在时间轴上为两点间线段对应值. 【名师点拨】注意几种时间和时刻的说法 (1)第1 s内、第2 s内、第3 s内、……、第n秒内指的是时间,在数值上都等于1 s. (2)最初2 s内、最后2 s内、……、最初n s内都是指时间,在数值上对应所述值. (3)第1 s末(或第2 s初),第2 s末(或第3 s初),…….都是指时刻.如下图所示. 1.质点做直线运动的位移x与时间t的关系为x=5t+t2(m)(各物理量均采用国际单位制),则该质点() A.第1 s内的位移是5 m B.前2 s内的平均速度是6 m/s C.任意相邻的1 s内位移差都是1 m D.任意1 s内的速度增量都是2 m/s
黑龙江护理高等专科学校 2015~2016学年第二学期 2015级康复治疗技术专业期末考试试卷(A ) 一、名词解释(每题4分,共20分) 1. 平衡角(稳定角) 2. 向心收缩 3. 肩肱节律 4. 牵张反射 5. 人体运动分析 二、填空题(每题1分,共30分) 1. 人体步行时的运动形式包括 、 、 、 。 2. 力量训练的原则有 、 、 、 。 3. 表示运动强度的常用指标有 、 、 。 4. 制定运动处方应遵循的原则有 原则、 原则、 原则和 原则。 5. 关于心指数,人体安静时, 与 呈线性关系,与 、 不成比例 6.状态反射包括 反射与 反射 7. 姿势的方向性是 和 间适当关系的能力。 8. 步态控制的三个任务是 、 和 。 9. 肌筋膜包括 、 和 ,是与肌纤维 的弹性成分。 三、单项选择题,请把正确的选项填在括号内(每题1分,共20分)
1. 屈伸运动是指() A.环绕冠状轴在矢状面上的运动 B. 环绕矢状轴在冠状面上的运动 C.环绕垂直状轴在水平状面上的运动 D. 环绕矢状轴在水平状面上的运动 E.环绕垂直轴在矢状面上的运动 2. 下蹲过程中,下肢处于封闭运动链,因有() A.髋、膝与踝关节共同活动 B.仅髋关节活动 C.仅膝关节活动 D.仅踝关节活动 E. 仅肢体活动 3. 力系平衡的充分必要条件是() A.合力、合力矩为零 B. 合力为零、合力矩大于零 C.合力矩为零、合力大于零 D.多个力大小相等、方向相反 E.二力大小相等、方向相同 4. 刚体角速度的大小和方向对时间变化率的物理量指的是() A.角速度 B.角加速度 C.角位移 D.角动量 E.角冲量 5. 运动神经元发放的冲动频率高时() A.肌的伸展性增加 B.肌的收缩力降低 C.肌的弹性增加 D.肌的粘滞性增加 E.募集的运动单位多 6. 骨骼肌收缩起到缓冲、制动、减速与克服重力作用的属于() A. 向心收缩 B. 离心收缩 C.拉长-缩短收缩 D. 等动收缩 E.等速运动 7. 当上臂上举150°,盂肱关节运动约是() A.80° B. 90° C. 60° D. 70° E.100° 8. 限制髋关节过伸的组要结构是() A. 髋臼 B. 关节囊 C.耻股韧带 D.坐股韧带 E.髋股韧带 9. 肌自身的形态结构和神经调节能力两个方面是力量素质的() A.生理基础 B.解剖基础 C.物理基础 D.生化基础 E.组织结构 10.下列哪项运动属于静力性力量训练() A.引体向上 B.俯卧撑 C.蹲马步 D.仰卧起坐 E.杠铃 11.运动训练使心泵功能提高,主要表现为() A.心房舒张末期容积增加 B.心室舒张末期容积增加
河南机电高等专科学校
毕业设计(论文)任务书
系 专 部: 业: 机械工程系 计算机辅助设计与制造 王娜娜 学 号: 080115336
学生姓名: 设计(论文)题目:
某某机构的结构设计与建模
起 指
迄 导
日 教
期: 2012 年 11 月 8 日~ 2013 年 1 月 11 日 师: 王 伟
2012 年 11 月 8 日
毕 业 设 计(论 文)任 务 书
1.本毕业设计(论文)课题来源及应达到的目的:
本课题来源于教学实践,涉及****的三维建模。熟悉和掌握液压控制元件的基本结 构、工作原理和特点,是正确分析和设计液压系统的基本前提。为了提高液压传动课程 教学质量,强化学生对液压控制阀工作原理的认识,提出制作压力控制阀工作原理动画 的课题。 通过本毕业设计使学生掌握简单机械零部件的设计方法,培养学生独立分析和解决 工程实际问题的能力,培养学生查阅科技方面资料、使用各种标准手册以及自学和独立 工作能力,并锻炼学生理论联系实际,综合运用知识的能力。
2.本毕业设计(论文)课题任务的内容和要求(包括原始数据、技术要求、 工作要求等) :
1. 工作主要内容 根据某某机构的基本结构,详细分析工作原理与功能特点,然后进行结构参数设计, 并采用三维建模软件完成某某机构的建模与装配。 2. 原始资料 某某机构的基本结构图( 《课本》某某主编,P152 页图 234-234) 。 3. 设计要求 装配图(A3 以上) ; 刻盘一张(内含建模与装配文件) ; 毕业设计说明书页数≥25。
所在专业审查意见:
系部意见:
负责人: 年
月
日
系领导: 年
月
日
第一章 1、平均速度定义式:t x ??=/υ ① 当式中t ?取无限小时,υ就相当于瞬时速度。 ② 如果是求平均速率,应该是路程除以时间。请注意平均速率与平均速度在大小上面的区别。 2、两种平均速率表达式(以下两个表达式在计算题中不可直接应用) ③ 如果物体在前一半时间内的平均速率为1υ,后一半时间内的平均速率为2υ,则整个过程中的 平均速率为2 2 1υυυ+= ④ 如果物体在前一半路程内的平均速率为1υ,后一半路程内的平均速率为2υ,则整个过程中的 平均速率为2 12 12υυυυυ+= ⑤ ??? ????====t x t x 路位时间路程平均速率时间位移大小平均速度大小 3、加速度的定义式:t a ??=/υ ⑥ 在物理学中,变化量一般是用变化后的物理量减去变化前的物理量。 ⑦ 应用该式时尤其要注意初速度与末速度方向的关系。 ⑧ a 与υ同向,表明物体做加速运动;a 与υ反向,表明物体做减速运动。 ⑨ a 与υ没有必然的大小关系。 第二章 1、匀变速直线运动的三个基本关系式 ⑩ 速度与时间的关系at +=0υυ ? 位移与时间的关系2 02 1at t x + =υ (涉及时间优先选择,必须注意对于匀减速问题中给出的时间不一定就是公式中的时间,首先运用at +=0υυ,判断出物体真正的运动时间) 一般规定0v 为正,a 与v 0同向,a >0(取正);a 与v 0反向,a <0(取负) 同时注意位移的矢量性,抓住初、末位置,由初指向末,涉及到x 的正负问题。 注意运用逆向思维: 当物体做匀减速直线运动至停止,可等效认为反方向初速为零的匀加速直线运动。 (1)深刻理解: ? ??要是直线均可。运动还是往返运动,只轨迹为直线,无论单向指大小方向都不变 加速度是矢量,不变是加速度不变的直线运动 (2)公式 (会“串”起来)
各位同学,大家早上好,今天我们来继续学习运动技术分析与诊断这门课程,在学习本节课之前,我们先来回顾一下,上节课学习的人体运动的运动学分析的主要内容。 复习:一、人体关节的相关概念 二、人体关节运动的基本形式 三、人体运动链的分类 四、人体运动的自由度 一、人体关节的相关概念 关节:骨与骨以结缔组织相连结构成关节。根据连结组织的性质和活动情况,关节可分为不动关节(韧带联合、软骨结合和骨性结合)、动关节(肩、肘、腕、髋、膝、踝关节)和半关节(耻骨联合)。 二、人体关节运动的基本形式 1)角度运动 邻近两骨间产生角度改变的相对转动,称为角度运动。通常有屈、伸和收、展两种运动形态。 2)旋转运动 骨绕垂直轴的运动称为旋转运动,由前向内的旋转称为旋内,由前向外的旋转称之旋外。 三、人体运动链的分类 开放运动链末端呈游离状态,它的某一关节固定,其余各关节产生运动。 如果运动链首尾相连,形成闭合状态,末端无游离的环节,称为闭合运动链。 四、人体运动的自由度 假如物体不受任何限制(约束),它可以在三度空间运动,也既是相对于三个相互垂直轴的平动及绕三个轴的转动,物体有六个自由度。 当把物体某一点固定时,其自由度为三个,这时不能产生平动,只能以三个坐标轴为轴发生转动(可把原点放在固定点)。 当物体的某两点固定时,只有一个自由度,既以两点的连线为轴的转动。
当物体上任意三点固定时,则自由度为零,不产生任何方向的平动和转动。 在前面运动技术分析与诊断中我们所讲的是一些运动学、动力学和肌肉力学的一些理论知识,通过上半程的学习对技术分析有个理论上的知识,在后面的学习中将主要进行的是一些实际的应用操作。那么,今天所要学习的就是运动技术分析与诊断的工作环节以及现场数据采集。 第六章运动技术分析与诊断的工作环节及现场数据采集 第一节运动技术数据的意义 运动技术数据是指从人体运动过程中采集到得能够准确描述其运动状态的相关性息。人体运动与时间、空间相关的信息称之为运动学数据;人体运动与作用力、时间相关的信息称之为动力学数据。 一、运动学数据对运动技术的意义 运动学数据包括关节位置和关节角度、位移和角位移、速度和角速度、加速度和角加速度。 1)关节位置和关节角度 人体关节位置和关节角度数据可以准确描述人体运动的姿势。 A.关节位置 人体运动系统的支架是由骨骼和关节组成的一种链状结构,当这种链状结构的枢纽位置(关节位置)发生变化时,便会引起整个支架的形态发生变化。因此,人体运动时身体姿势可以看成是由各个关节在空间位置决定的。 图中显示了关节位置与动作姿态相关的情况。从图中可以看出,当人体任何一个关节点的位置发生变化时,都必然会引起动作姿态发生变化;反之,当人体动作姿态发生变化时,也必然会伴随关节位置的变化。 B.关节角度 人体每个关节的角度决定相邻两个运动环节之间的相互关系,关节角度数据直接描述动作姿态中每个关节的伸展和弯曲状况。在分析评价运动技术姿势时,关节角度也是一个重要的指标。 2)位移和角位移 A.位移 人体动态运动过程可以看成是由一系列有序的静态姿势所组成,当人体从一个姿势连续变化到另一个姿势时,肢体各部位的位置会发生一系列的连续变化,位置变化的距离称之为位移。 我们以100米途中跑时人体总重心的位移情况为例,通过运动员途中跑的影像资料求出途中跑每个瞬时的总重心位置坐标,便可以在坐标中做出途中跑人体