竞争对手分析(S120)
——冗余电源与系统并联
一、关于冗余电源与系统并联的区别:
1、冗余电源对于整流输入都必须分别有自己的控制单元。
2、系统并联只是为了提高输出功率,只需要一个控制单元。
二、冗余电源类型:
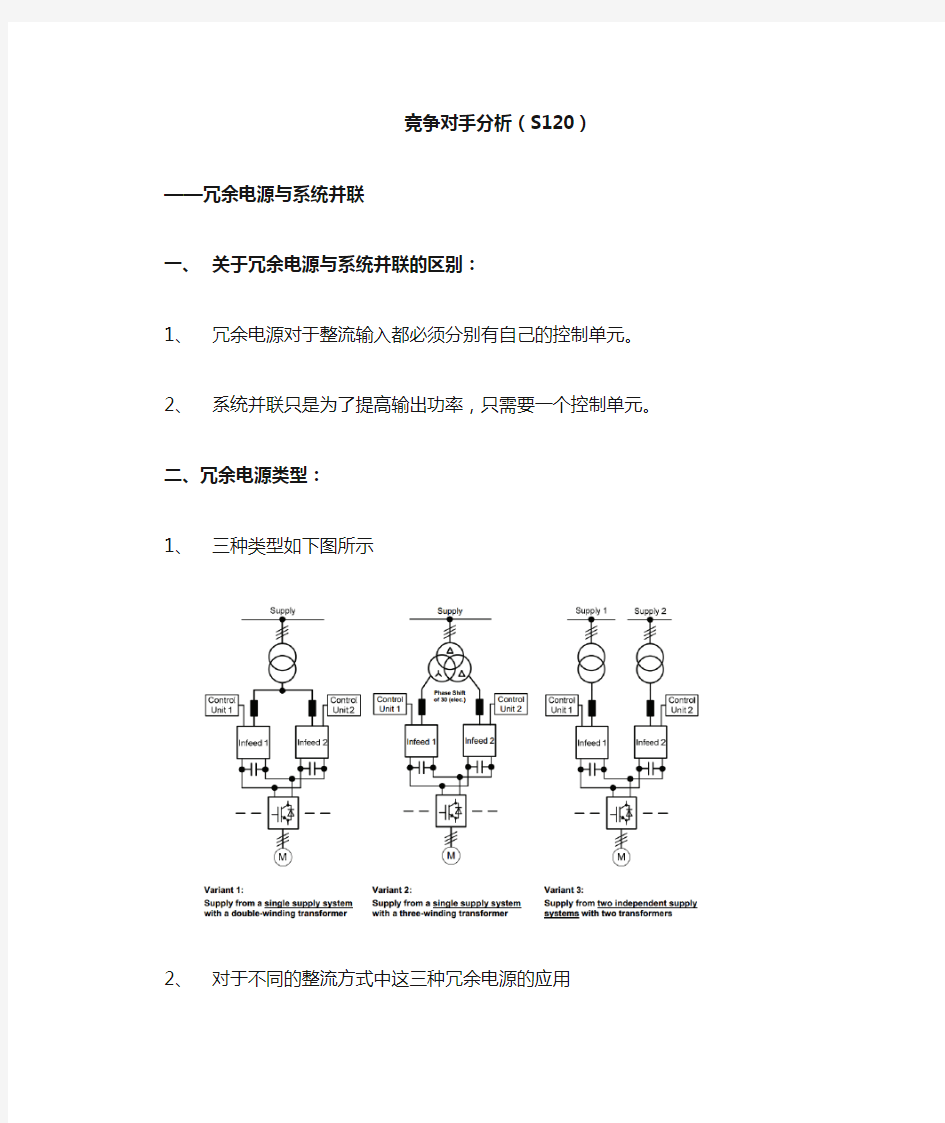
1、三种类型如下图所示
2、对于不同的整流方式中这三种冗余电源的应用
1)在基本整流中,这三种类型都可以使用,但是必须注意输入电抗器的匹配以及充电回路必须任何单个整流单元都可以独立对整个母线实现充电过程。
2)在回馈整流中,只有第2种类型可以使用,同样要注意输入电抗器的使用以及充电回路的配置。
3)在有源整流中,第2种和第3种类型可以使用;但是必须采用主从的控制方式,当任何一个从机发生故障,其他继续工作,当主机发生故障,其中一台从机必
须自动切换为主机继续工作。充电回路必须任何单个整流单元都可以独立对整
个母线实现充电过程。另外,必须注意,从机变压器绕组的中间抽头不能进行
接地。
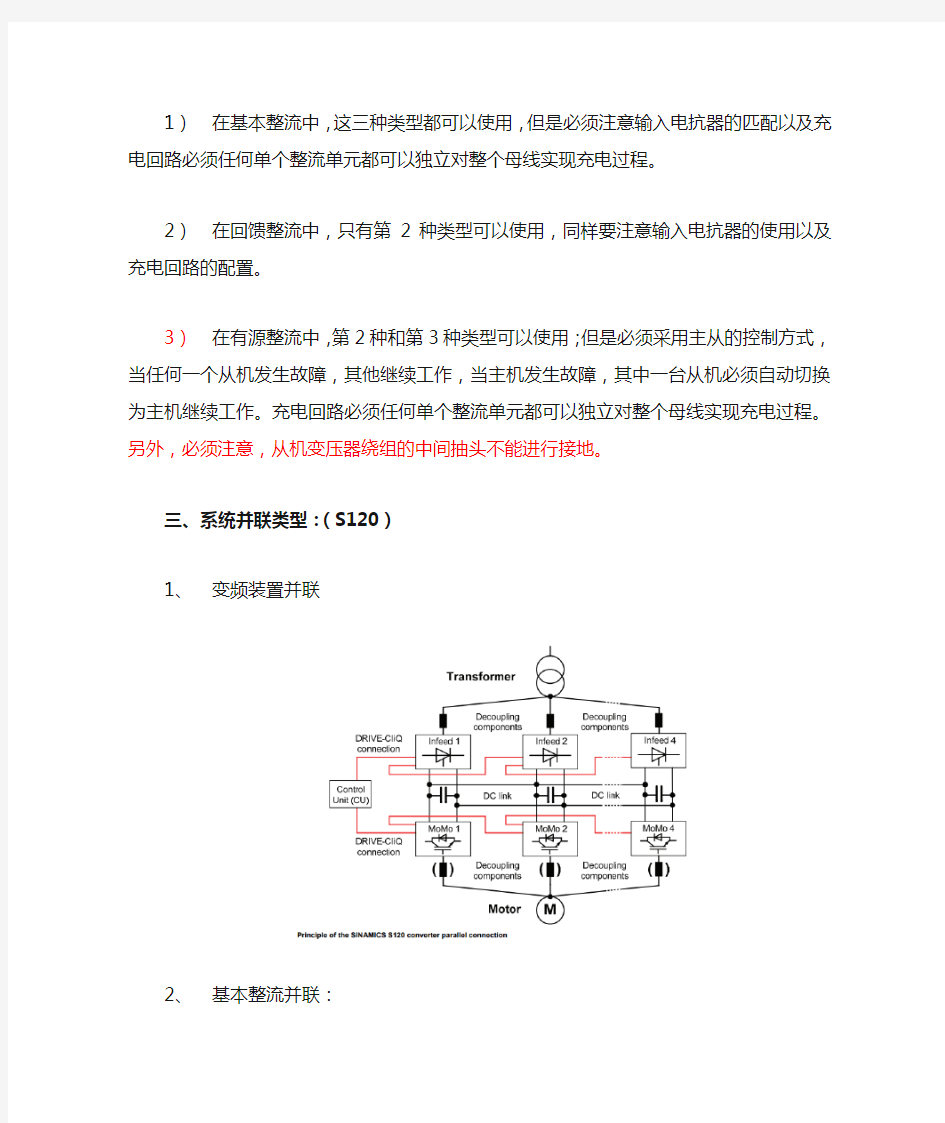
三、系统并联类型:(S120)
1、变频装置并联
2、基本整流并联:
注意:对于12脉冲整流必须保证以下几个条件:
3、回馈整流并联:
注意:回馈整流的两个部分采用了两个控制单元,因为回馈整流采用IGBT驱动,需要控制单元控制门极,而且变压器两个次级绕组相移30°,为了保证充电回路不过载,每个绕组的充电回路都能够完全实现母线充电。
4、有源整流并联:
5、逆变并联:
注意:G150系列并联对于小于1500kw的功率段,必须在输入侧分别加入注接触器,以保证充电回路安全运行。
0 引言 随着能源消费的增长、日益恶化的生态环境和人类环保意识的提高,世界各国都在积极寻找一种可持续发展且无污染的新能源。太阳能作为一种高效无污染的绿色新能源,一种未来常规能源的替代品,尤其受到人们的重视。太阳能的直接应用主要有光热转换、光电转换和光化学转换三种形式,光电转换(即光伏技术)是最有发展前途的一种。 1 系统的工作原理及其电路设计 光伏系统的总体框图如图1所示。 图1 系统的总体框图 由图1可知,整个系统包含充电和逆变两个主要环节。太阳电池是本系统赖以工作的基础,它的效率直接决定系统的效率。 1.1 充电控制部分 1.1.1 太阳电池的工作特性 太阳电池作为光伏系统的基础,其工作特性,包括工作电压和电流与日照、太阳电池温度等有着密切的关系,图2、图3分别给出了太阳电池温度在25℃时,工作电压、电流和日照的关系曲线及太阳电池的输出功率和日照(S)、U之间的曲线。 从图2可以看出,曲线上任一点处的功率为P=UI,其值除和U、I有关外,还与日照(S)、太阳电池温度等有关。由图3进一步可知,由于太阳电池的工作效率等于输出功率与投射到太阳电池面积上的功率之比,为了提高本系统的工作效率,必须尽可能地使太阳电池工作在最大功率点处,这样就可以以功率尽可能小的太阳电池获得最多的功率输出。在图2和图3中,A、B、C、D、E点分别对应不同日照时的最大功率点。
图2 工作电压、电流和日照关系曲线 图3 输出功率和日照关系曲线 1.1.2 太阳电池的最大功率点跟踪(MPPT) 由图1可知,系统首先采用太阳电池阵列对蓄电池进行充电,以化学能的形式将太阳能储存在蓄电池中。在这个过程中,通常采用自寻最优控制方式使太阳电池在最大功率点处工作。整个控制过程可以分解成两个阶段进行: 1)确定出太阳电池工作在最大功率点时的输出电压值Uref; 2)改变太阳电池对蓄电池的充电电流使太阳电池的输出电压稳定在Uref。 这两个阶段是由控制电路通过检测太阳电池的输出电压和电流,采用逐次比较法来实现的。 1.2 逆变器设计 1.2.1 逆变电路设计 正弦波逆变环节采用单相全桥电路,用IGBT作逆变电路的功率器件。IGBT 是电压控制型器件,它集功率MOSFET和双极型晶体管的优点于一体,具有驱动电路简单、电压和电流容量大、工作频率高、开关损耗低、安全工作区大、工作可
开关电源模块并联供电系统(A题) 摘要: 本系统给出了以分立元件构成的DC/DC变换模块为核心的开关电源,并制作一个由两个额定输出功率均为16W的8VDC/DC模块构成的并联供电系统。系统采用 STC89C52单片机进行监控,并用高精度的德州仪器芯片TLC5615IP和TLC2543CN进行数模、模数转换,实现电流的实时测量、人机交互、电流比例设定、输出电流显示、过流保护及自动恢复功能。经测试,系统较好地完成了基本部分和发挥部分的要求,工作稳定,用户界友好。 关键词:分立元件;DC/DC变换模块;开关电源;并联;德州仪器芯片
1 方案比较与论证 1.1 DC/DC变换电路的选择 方案一:由LM2576开关型降压稳压器构成 LM2576系列的稳压器是单片集成电路,能提供降压开关稳压器(buck)的各种功能,能驱动3A的负载,有优异的线性和负载调整能力,使用该器件构成的DC/DC变换电路的设计思想如下: 图1.1(a) 由LM2576构成的DC/DC变换电路 该稳压器内部含有频率补偿器和一个固定频率振荡器,将外部元件的数目减到最少,使用简单,但由于集成电路工艺制造的元器件,各元器件参数的据对精度不是很高,而且受温度的影响也比较大,因此我们放弃这种方案。 方案二: 由分立元件构成 本电路是自己设计的,由施密特触发器74HC14、运算放大器LM324、三极管、二极管、电阻、电容以及电感等器件组成的核心电路,提供了自由调整的余地,另外为了不致过载、过流、过热等损坏元件,需要加以复杂的保护电路。下图为DC/DC 主回路的拓扑结构: 图1.1(b) 由分立元件构成构成的DC/DC变换电路 由于由分立元件构成的DC/DC变换电路,电路选择得好,参数选择恰当,元件性能就很优良,设计和调试的好,则性能也很优良。因此本系统选择方案二。 1.2 控制方法及实现方案
(N+X)热插拔模块并联 逆变电源系统 技 术 手 册
非常感谢您选用我司产品,请在安装及使用前务必认真阅读本手册。 重要的安全预防信息 在您安装前或操作本逆变电源系统时,务必牢记下列安全措施,避免发生火灾、电击或其它人身伤害的可能性。 1、阅读并理解本技术手册的全部内容。 2、遵从产品及附带的印刷品中标注的警告事项及说明。 3、本产品仅能用于一般商业/工业用途,不能用来给生命支持设备或其它 标明为“危急”的设备提供电源。设备铭牌上标识了最大负载,实际 运行中不能超过该最大负载量。 4、本逆变器静态旁路输入端应采用有良好接地的220V 50Hz的交流电,本 设备的安装须由专业人员安装。安装人员必须根据技术标准和当地电 气规范,对用户方的电缆、断路器、负载进行评估,核实输入、输出 和接地连接正确。 5、当操作说明与安全信息发生冲突时,请遵从安全信息,请注意您是否 误解了操作说明的内容! 如果您不能断定问题所在,请向销售商或制造商寻求帮助。 6、产品重量和体积较大,搬动过程避免摔跌、碰撞。 7、注意不要将产品靠近或放在发热体、取暖器、空调器或排气管道上。 8、本系统必须安装在牢固的水平面上,所有连接要牢固,并能防止老鼠 等动物的破坏。 9、请将本设备置于温度为0~40℃的室内环境下工作,安装地请远离水 蒸气和其它液体物质,远离易燃、易爆物质。 10、请不要让本系统超载工作,避免火灾及电击事故发生。 11、设备从寒冷搬到室温环境中时,请仔细检查机器表面有无露水凝结, 不要马上开机使用,保证启动前消除所有水分。
12、清洁本设备前,应关闭本设备并断电。清洁工具只能使用柔软的干布, 不要采用液体或气雾洁具。 13、注意保持本设备的前后通风口通风良好,不能有任何物体阻塞通风口 和其它开口。 14、为避免发生电击事故,不要随意拆卸本产品。需要维修时,请寻求有 资格的专业技术人员帮助。 15、请保存好本手册。
DSP逆变电源并联系统锁相环设计 摘要:提出了一种基于DSP的消除SPWM全桥逆变器直流偏磁问题的控制方案,采用TI公司的DSP芯片TMS320F240来实现。在一台400Hz6kW样机上进行了实验,实验结果表明该方案能较好地解决全桥逆变器中的直流偏磁问题。 本文引用地址:https://www.doczj.com/doc/d53155136.html,/article/264220.htm关键词:全桥逆变器;直流偏磁;正弦波脉宽调制 1引言 近年来,SPWM逆变器已经在许多交流电能调节系统中得到广泛应用,相对于半桥而言,全桥逆变器的开关电流减小了一半,因而更适合于大功率场合。在SPWM全桥逆变器中,为实现输入输出之间的电气隔离和得到合适的输出电压幅值,一般在输出端接有基频交流变压器。而在输出变压器中,由于各种原因引起的直流偏磁问题致使铁心饱和,从而加大了变压器的损耗,降低了效率,甚至会引起逆变器颠覆,严重影响了SPWM全桥逆变器的正常运行,必须采取措施加以解决。 随着高频开关器件的发展,模拟瞬时值反馈控制使SPWM逆变器获得了优良的动态响应特性和较小的谐波畸变率。但模拟控制存在着分散性大、温度漂移及器件老化等不利因素,因而给设备调试及维护造成许多困难。数字控制克服了模拟控制的上述缺点,并具有硬件简单、调试方便、可靠性高的优势,因而引起了高度的重视。本文在对SPWM全桥逆变器中输出变压器直流偏磁机理分析的基础上,提出了一种数字PI控制方案,通过采样输出变压器原方电流来调整触发脉冲宽度。该方案利用DSP芯片TMS320F240在一台全数字化6kW、400Hz中频逆变电源上得以实现,实验结果表明所提出的方案较好地抑制了输出变压器的直流偏磁。 2直流偏磁 DSP控制的SPWM全桥逆变器如图1所示。直流偏磁是指由于输出变压器原边电压正负波形不对称,引起变压器铁心工作磁滞回线中心点偏离零点,从而造成磁工作状态不对称的现象。变压器工作时,磁感应强度B的变化率为
A-开关电源模块并联供电系统(A题)
2011年全国大学生电子设计竞赛试题 参赛注意事项 (1)2011 年 8 月 31 日 8:00 竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题; 高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。 (3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。 (4)每队严格限制 3 人,开赛后不得中途更换队员。 (5)参赛队必须在学校指定的竞赛场地内进行独立设计和制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。 (6)2011 年 9 月 3 日 20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。 开关电源模块并联供电系统(A题) 【本科组】 一、任务 设计并制作一个由两个额定输出功率均为 16W的 8V DC/DC模块构成的并联供电系统(见图 1)。 + I IN DC/DC 模块 1 I1 I O + U IN=24V 负载 电阻U O=8.0V - DC/DC 模块 2 I2 - 图 1两个 DC/DC模块并联供电系统主电路示意图 二、要求 1.基本要求 (1)调整负载电阻至额定输出功率工作状态,供电系统的直流输出电压U O=8.0±0.4V。 (2)额定输出功率工作状态下,供电系统的效率不低于 60% 。 (3)调整负载电阻,保持输出电压 U O=8.0±0.4V,使两个模块输出电流之和 I O =1.0A 且按I1:I2=1:1 模式自动分配电流,每个模块的输出电流的相对误差绝对值不大于 5%。 (4)调整负载电阻,保持输出电压 U O=8.0±0.4V,使两个模块输出电流之
课程设计Ⅱ 题目开关电源模块并联供电系统学生姓名学号 所在院(系)物电学院 专业班级电信081班 指导教师刘东 完成地点陕西理工学院 2011年 11月28日
开关电源模块并联供电系统 康恺 (陕西理工学院物电学院电子信息科学与技术专业08级1班,陕西汉中 723001) 指导老师:刘东 【摘要】:开关电源模块供电系统由并联稳压电源和检测控制系统组成。稳压电源使用电压调节器LM2596实现降压,监测控制电路采用AT89C51单片机作为控制核心,采集两路电流信号,通过算法分配误差值,修正每一路的电流大小,并显示电流的相对误差。系统的负载电流超过设定值时,启动保护电路切断电源并延时一定时间后自动恢复供电。经测试,供电系统能够较好的实现两路电流分配,效率可以达到70%以上,每路电流的相对误差3%左右。 【关键词】:LM2596;开关电源;并联均流 Switching Power Supply Module Parallel Power Supply System kangkai (Grade08,Class1,Majiothe physics electronic information science ,Dept, Shannxi University of the Technology,Hanzhong,723001,Shannxi) Instructor: Liu don Abstract: Switching power supply module power supply system was composed of Shunt regulated power supply and control system testing. Power supply used LM2596 regulator to achieve step-down voltage. Monitoring and control circuit based on AT89C51 microcontroller collected two current signals, the error value was assigned by the algorithm, the amendment of the current size of each road, and displays the current relative error. System load current exceeds the set value, the start delay protection circuit cut off power and restore power automatically after a certain time. Tested, the power supply system can achieve a better distribution of two current efficiency can reach 70% or more, each current relative error 3%. Key words: LM2596; switch power; power supply in parallel
逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,鲁棒性好,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点: PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。 重复控制
2011年全国大学生电子设计竞赛陕西赛区 竞赛设计报告封面 作品编号: (由组委会填写) 作品编号: (由组委会填写) 说明 1.为保证本次竞赛评选的公平、公正,将对竞赛设计报告采用二次编码; 2.本页作为竞赛设计报告的封面和设计报告一同装订; 3.“作品编号”由组委会统一编制,参赛学校请勿填写; 4.“参赛队编号”由参赛学校编写,其中“学校编号”应按照巡视员提供的组 委会印制编号填写,“组(队)编号”由参赛学校根据本校参赛队数按顺序编排,“选题编号”由参赛队员根据所选试题编号填写,例如:“0105B”或“3367F”。 5.本页允许各参赛学校复印。
开关电源模块并联供电系统 设计与总结报告 摘要:本设计是针对2011年全国电子设计大赛A题,电路的设计是基于BUCK 拓扑的开关稳压电路的拓扑结构,以美国NSC的LM2576为功率输出核心,提出一种基于并联Buck变换器的自主均流控制方法,该方法基于并联Buck变换器状态方程,设计了由控制电路、保护电路和驱动电路组成的自主均流的开关电源模块并联供电系统 关键词:并联型自主均流控制
方案一:隔离式DC/DC转换器,通常采用变压器来实现,由于变压器具有变压的功能,所以有利于扩大转换器的输出应用范围,也便于实现不同电压的多路输出,或相同电压的多种输出;并有效地实现实现输出与输入电气隔离,但对变压器的要求较高。 方案二:非隔离式DC/DC转换器。 由于变压器存在漏磁和损耗,会造成效率低下,故采用非隔离型,题目要求是将24V直流电压转换为8V,为降压电路,因此buck型非隔离式DC-DC转换器。 (4)控制方法 方案一:电压型控制方法,开关变换器输出的电压VEB与参考电压比较并放大,得到误差信号VE,VE又与PMW比较器和锯齿波信号相比较,从而输出一系列脉冲,这些脉冲的宽度随误差信号VE的变化而变化。此方法夫人单环回路容易设计和分析,锯齿波幅度比较大,抗干扰能力比较强,但输入或输出的变化只能在输出改变时才能控制并反馈进行修正,响应速度慢,电压型控制对负载电流没有限制,因而需要额外电路限制输出电流。 方案二:电流型控制方法,实在传统的电压型控制基础上,增加了一个内环(电流反馈环),使其成为一个双环路控制系统。此电路中回路稳定性好,负载响应快,具有过流保护和可并联性。双反馈回路使得电路分析变得比较复杂,由于控制回路需要电感电流控制信息,控制电路的存在增加了整个变换器设计的复杂性,同时也会影响变换器的效应。 综合以上分析,本系统采用电流型控制电路。 (5)电源电路 由于提供24V直流电,采用78XX系列稳压以及LM1117逐级降压为MSP430提供3.3V供电电压。采用ICL766产生负极性的电压供给仪表放大器AD620.。 二.理论分析 1 DC-DC变换器稳压方法 利用无源磁性元件和电容电路元件的能量存储特性,从输入电压获取分离的能量,暂时地把能量以磁场形式存储在电感器中,或以电场形式存储在电容器中,然后将能量转换到负载,实现DC-DC转换。其中采用PWM技术,从输入电源提取能量随脉宽变化,在一个固定周期内实现平均能量转换。最终达到将固定的直流电压变换成可变的直流电压。 2 电流电压的检测 使用与电感串联电阻来检测电流,控制信号和补偿斜坡通过比较器与误差放大器的输出进行比较,从而进行脉宽调制。 3 均流的方法 在两个并联的模块中,以输出最大电流的模块为主模块,其余为从模块,利用二
题目: 开关电源模块并联供电系统
目录 摘要: (1) 一、系统方案 1.DC/DC模块主电路 (2) 2.开关管驱动电路 (2) 3.辅助电源电路 (2) 4.系统总体方案 (3) 二、理论分析与计算 (3) 1.DC/DC变换器稳压方法 (3) 2.电流、电压检测 (5) 3.均流方法 (6) 4.过流保护 (6) 三、硬件电路与软件设计 (6) 1.硬件电路设计 (6) 2.软件设计 (7) 四、测试条件与结果 (9) 1.测试仪器设备 (9) 2.基本要求测试数据 (9) 3.发挥部分测试数据 (10) 4、结果分析 (11) 五、参考文献 (11)
开关电源模块并联供电系统 摘要:本设计以Atmage16L-8PU单片机为控制器,由DC/DC模块电路、开关管驱动电路、辅助电源电路、电流采样电路、单片机电路、键盘电路和显示电路组成。其中,DC/DC 模块采用BUCK电路实现,开关管驱动电路采用IR2110芯片完成,辅助电源由单片开关电源芯片LM2576产生,并增加后置线性稳压环节。单片机实现闭环控制功能,稳定输出电压,并实现两路电源自动或按指定比例分流。测试结果表明,系统各项指标均达到题目要求。 Abstract:In the design, MCU Atmage16L-8PU is used as a controller. The system is composed of DC/DC modules, switch drive circuits, auxiliary power suppliers, current and voltage detection circuits, MCU system, display and keyboard control circuits. DC/DC module is based on BUCK circuit. Switch MOSFET is drived by IR2110 chips. Auxiliary power suppliers are generated by the switch mode power supply chip LM2576 with a linear post regulator. Closed-loop control is realized by MCU, so the output voltage is stabled and the currents of the two DC/DC modules are decided automatically or by the specified proportion. Test results show that the system has definitely met the design demand.
开关电源模块并联供电系统(A题) 【本科组】 摘要 本系统以DSPMS320C28335作为主控,以单端反激式电路作为核心,根据AD采集两路DC模块输出电路分别控制两路PWM,做出相应调整,从而实现在4.0A以内,A、B两路DC模块电流比例在0.5~2.0之间步进为0.1的比例可调。测试表明,本系统达到了题目的基本要求和扩展要求的全部功能。
开关电源模块并联供电系统(A题) 【本科组】 一、系统方案 本系统主要由DC-DC主回路模块、信号采样模块、主控模块、电源模块组成,下面分别论证这几个模块的选择。 1.1 DC-DC主回路的论证与选择 方案一:采用推挽拓扑。 推挽拓扑因其变压器工作在双端磁化情况下而适合应用在低压大电流的场合。但是,推挽电路中的高频变压器如果在绕制中两臂不对称,就会使变压器因磁通不平衡而饱和,从何导致开关管烧毁;同时,由于电路中需要两个开关管,系统损耗将会很大。 方案二:采用Boost升压拓扑。 Boost电路结构简单、元件少,因此损耗较少,电路转换效率高。但是,Boost电路只能实现升压而不能降压,而且输入/输出不隔离。 方案三:采用单端反激拓扑。 单端反激电路结构简单,适合应用在大电压小功率的场合。由于不需要储能电感,输出电阻大等原因,电路并联使用时均流性较好。 方案论证:上述方案中,方案一系统损耗大,方案二不能实现输入输出隔离,而方案三虽然对高频变压器设计要求较高,但系统要求两个DCDC模块并联,并且对效率有一定要求。因此,选择单端反激电路作为本系统的主回路拓扑。 1.2 控制方法及实现方案 方案一:采用专用的开关电源芯片及并联开关电源均流芯片。这种方案的优点是技艺成熟,且均流的精度高,实现成本较低。但这种方案的缺点是控制系统的性能取决于外围电路元件参数的选择,如果参数选择不当,则输出电压难以维持稳定。 方案二:采用TI公司的DSP TMS320C28335作为主控,实现PWM输出,并控制A/D对输入输出的电压电流信号进行采样,从而进行可靠的闭环控制。与模拟控制方法相比,数字控制方法灵活性高、可靠性好、抗干扰能力强。但DSP成本不低,而且功耗较大,对系统的效率有一定影响。 方案论证:上述方案中,考虑到题目要求的电流比例可调的指标,方案一较难实现,并且方案二开发简单,可以缩短开发周期。所以,选择方案二来实现本系统要求。
选修课设计 (论文) 题目开关电源模块并联供电系统设计专业电子信息工程 班级 111 112班 姓名邓逸博孙浙飞汪超 指导教师王章权 所在学院信息学院 完成时间:2014年5月
开关电源模块并联供电系统设计 电子信息工程专业邓逸博孙浙飞汪超 摘要:本设计设计制作的是开关电源模块并联供电系统,能够广泛应用在小功率及各种电子设备领域,能够输出8V定压,功率可达到16W,并根据要求对两路电流进行按比例分配。本系统由DC/DC模块,均流、分流模块,保护电路组成。DC/DC模块以IRF9530芯片为开关,配以BUCK的外围电路实现24V-8V的降压与稳压。采用LM328比较电路实现电流和电压的检测,控制由DC/DC模块构成的并联供电系统均流与分流工作模式,通过比较器电路实现过流保护。同时进行LCD1602液晶同步显示、独立键盘输入控制。输入的值经过单片机处理程序来控制输出电压,且输出电压和电流可实时显示。 关键词:DC/DC模块,BUCK,电流分流
目录
一、绪论 分布式直流开关电源系统取代传统的集中式直流开关电源系统已成为大功率电源系统的发展方向:(1)单台大功率电源容易受技术、成本的限制;(2)单台直流开关电源故障会导致整个系统的故障,而分布式电源系统由若干电源模块并联组成,某个电源模块故障不会导致整个电源故障;(3)可根据实际负荷的变化,自动确定需要投入运行的模块数量或者解列退出的模块数量,对变负荷运行很有意义;(4)由于多个电源模块并联运行,使每个电源模块承受的电应力较小,具有较高的运行效率,且具有较好的动态和静态特性。分布式电源系统需要解决的主要问题是实现多个并联运行的模块输出相同的功率。随着通信电源技术的高速发展,电力电子设备与人们的工作、生活的关系日益密切,而通信电子设备都离不开可靠的电源。进入20世纪80年代,计算机电源全面实现了开关电源化,率先完成计算机的电源换代;进入20世纪90年代,开关电源相继进入各种电子、电气设备领域,程控交换机、通信、电力检测设备电源、控制设备电源等都已广泛使用了开关电源,更促进了开关电源技术的迅速发展。 二、设计的目标与基本要求 (一)、设计目标 设计并制作一个由两个额定输出功率均为16W的8V DC/DC模块构成的并联供电系统(见图) 图两路buck电路并联供电
https://www.doczj.com/doc/d53155136.html,/ 逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点:
https://www.doczj.com/doc/d53155136.html,/ PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。
并联逆变inverter系统各功能模块介绍 1、并联逆变模块 SWI系列升级版并联逆变电源及其系列产品是按照国家有关逆变电源的标准,针对我国具体情况设计、制造的电源设备。设备内部电路拓朴结构采用全高频数字化、智能软件控制,结合相应的硬件电路,反馈响应速度及过流、短路保护速度快速准确,有效地保护末级功率器件,使整机可靠性大为提高。 设备采用了无主从、自主均流并联方式的数字相位同步锁定技术,可以在不断开负载的情况下通过热插拔增加或减少并机模块,实现(N+X)并联冗余,当某一模块发生故障时,可自动退出并机系统,并发出故障告警信息。 本设备标准使用为多模块并联使用,也可单机使用。 3K V A(2U)逆变模块原理介绍 A )3KVA(2U)逆变模块原理框图: 图-1 3KVA(2U)逆变模块原理图 B )工作原理 直流电源提供的电压经保险丝、继电器、滤波器加到高频升压部分,将48V直流提升至400V直流,以满足逆变功率器件的工作要求。高频逆变部分将400V直流变换为220V、50HZ的交流电,经滤波后 通过继电器到输出端。控制器控制输入及输出继电器的通断,(当设备内部或外围出现故障时,继电器 断开,正常时闭合。)同时调节控制高频升压及高频逆变的工作状态及输出。滤波器将设备内部的高频 成份滤出,使之与输入、输出端隔离,不影响与其联接的其它外部设备。 C )、3KVA(2U)模块外型示意图 a)逆变器模块正面示意图,如图2
1、逆变器工作指示灯(绿) 2、逆变器负载指示灯 3、逆变器故障指示灯(红) 4、OFF按钮 5、ON按钮 图-2 3KVA(19″2U)逆变模块正面示意 b)逆变模块背面示意图 1、 功率接插件 2、保险 3、CAN总线接口(DB15) 4、模块输出火线 5、地线 6、模块输出零线 7、DC(-)输入 8、DC(+)输入 图-3 3KVA逆变模块后侧及接口示意图 2、并联系统静态旁路模块(选配件) 静态旁路模块单元原理图,见图4: 图-4 静态旁路模块原理图 静态旁路单元用来选择市电 / 逆变电源系统的输出转换。 有两种工作模式可以选择:一种是逆变电源系统为在线运行,市电作备用;另一种是交流市电作为运行电源,逆变电源系统作备用。无论哪一种工作模式,逆变电源系统都随时跟踪 / 锁定在市电的相位频率上,一旦运行中的电源发生故障,立即切换到备用电源上。 由于采用了由微控制器控制的快速跟踪 / 切换的静态旁路开关,所以本系统在旁路转换期间不会让计算机系统复位。 本逆变系统输出的零线是与市电零线一起连接到负载零线上的。火线则分别通过电子开关(双向可控硅)JK1、JK2切换到负载的火线上。当系统上电时,控制单元分别侦测市电及逆变系统输出的相位,并通过
摘要 本设计以单片机作为核心,辅以Buck电路、数字电位器作电流采集、光耦电路等电路,实现了一个由两个额定输出功率均为16W的8VDC/DC模块构成的开关电源模块并联供电系统的设计。系统输出电压8V稳定,两个模块电流可以按固定比例输出,供电系统效率达到60%以上。期间,我们解决了输出电压稳定问题、双路开关电源并联均流及非均流问题、通过单片机对电流及电压进行AD采样问题等问题。本系统具有调整速度高、精度高、散热性好等特点,保证了系统稳定性。 关键词:开关电源并联供电 Abstract This design is based on the MCU as the core, supplemented by Buck circuit, digital potentiometer for current collection, optocoupler circuit, has achieved a two rating output power is 16W 8V DC / DC module switching power supply module parallel power supply system design. The output voltage of 8V stability, two current module can be fixed scale output, power supply system efficiency can reach above 60%. During the period, we solve the output voltage stability problem, dual switching power supply parallel current equalization and non-uniform flow problem, through the single-chip microcomputer to current and voltage of the AD sampling and other problems. The system has a high tuning speed, high precision, good heat dissipation characteristics, to ensure the stability of the system. Keyword:Switch Power supply Parallel connection Power supply
摘要 本系统以STM32单片机为主控制器,以TL494为核心,设计并实现一开关电源并联供电系统。系统由稳压模块、PWM驱动模块和同步BUCK斩波电路构成的DC-DC模块单片机显示控制模块四部分组成。在AD采集到由电流互感器CSM006NPT的感应电压后,单片机通过TL494的PWM波控制两个恒流源实现了输出电压恒定以及对输出电流任意比的控制。本系统通过场效应管IRF3205代替续流二极管减小损耗从而提高电源效率,并且利用TL494死区引脚实现过流关断,有效的保护了电路,经测试,系统能够实现基础部分所有要求。 关键词:TL494;并联供电;同步BUCK斩波;恒流源;恒压 一、方案设计 1、方案比较与论证 (1) DC/DC拓扑结构 方案一:采用传统降压拓扑结构 LM2596输出电压1.2V~37V可调,输出最高电流可达3A,输出线性好负载可调,系统效率高,可以用仅80μA的待机电流,实现外部断电,具有过流保护功能,经调节后完全可实现题目的基本要求。但是LM2596内部电阻导通电阻相对较大,同时续流二极管的损耗较大,只能作为开关电源稳压模块,不满足系统对DC-DC模块高效率高效率的要求。 方案二:采用同步整流BUCK结构 采用具有同步整流的BUCK结构,利用MOS管IRF3205代替二极管续流,IRF3205是具有极低阻抗(开态电阻为8mΩ),电压典型值为55V,电流续流连续110A,175℃运行温度,具有快速转换速率,无铅环保等优点。考虑到系统MOS 管导通电阻低,效率比传统BUCK高,为了满足扩展部分效率尽可能高的要求,本作品选用同步BUCK拓扑结构。 (2)均流控制方案 方案一:主从法 在并联运行的电源模块单元中,选定一个工作于电压源方式电源模块单元作为主电源模块,另一个工作于电流源方式电源模块作为从流电源模块。主模块直接调整电压,从电源模块设置电流分配。但是在这种方式下,一旦主模块失效,则整个系统崩溃,不具备冗余功能。 方案二:平均电流自动均流法 这种方法不用外加均流控制器,在个电源模块单元间接一条公共均流母线CSB,均流母线的电压Ub为N个电源模块代表各自输出电流的电压信号Ui的平均值(即代表电源系统的平均电流)。Ub与每个电源模块的取样电压比较后,通过调整放大器输出一个误差电压,从而调节模块单元的输出电流,达到均流的目的。平均电流法可以精确的实现均流,但当公共母线CSB发生短路或接在母线的任一电源模块单元不工作时,使CSB电压下降,结果促使个电源模块输出电压下
0引言 随着能源消费的增长、日益恶化的生态环境和人类环保意识的提高,世界各国都在积极寻找一种可持续发展且无污染的新能源。太阳能作为一种高效无污染的绿色新能源,一种未来常规能源的替代品,尤其受到人们的重视。太阳能的直接应用主要有光热转换、光电转换和光化学转换三种形式,光电转换(即光伏技术)是最有发展前途的一种。 1 系统的工作原理及其电路设计 光伏系统的总体框图如图1所示。 图1 系统的总体框图 由图1可知,整个系统包含充电和逆变两个主要环节。太阳电池是本系统赖以工作的基础,它的效率直接决定系统的效率。 1.1充电控制部分 1.1.1太阳电池的工作特性 太阳电池作为光伏系统的基础,其工作特性,包括工作电压和电流与日照、太阳电池温度等有着密切的关系,图2、图3分别给出了太阳电池温度在25 C 时,工作电压、电流和日照的关系曲线及太阳电池的输出功率和日照(S)、U之 间的曲线。 从图2可以看出,曲线上任一点处的功率为P=UI,其值除和U、I有关外,还与日照(S)、太阳电池温度等有关。由图3进一步可知,由于太阳电池的工作效率等于输出功率与投射到太阳电池面积上的功率之比,为了提高本系统的工作效率,必须尽可能地使太阳电池工作在最大功率点处,这样就可以以功率尽可能小的太阳电池获得最多的功率输出。在图2和图3中,A、B、C、D、E点分别对应不同日照时的最大功率点。
图2 工作电压、电流和日照关系曲线 图3 输出功率和日照关系曲线 1.1.2太阳电池的最大功率点跟踪(MPPT) 由图1可知,系统首先采用太阳电池阵列对蓄电池进行充电,以化学能的形式将太阳能储存在蓄电池中。在这个过程中,通常采用自寻最优控制方式使太阳电池在最大功率点处工作。整个控制过程可以分解成两个阶段进行: 1)确定出太阳电池工作在最大功率点时的输出电压值Uref ; 2)改变太阳电池对蓄电池的充电电流使太阳电池的输出电压稳定在Uref。 这两个阶段是由控制电路通过检测太阳电池的输出电压和电流,采用逐次比较法来实现的。 1.2逆变器设计 1.2.1 逆变电路设计 正弦波逆变环节采用单相全桥电路,用IGBT作逆变电路的功率器件。IGBT 是电压控制型器件,它集功率MOSFET和双极型晶体管的优点于一体,具有驱动电路简单、电压和电流容量大、工作频率高、开关损耗低、安全工作区大、工作可 靠性高等优点。逆变器将蓄电池输出的直流电压转换成频率为50Hz 的SPWM 波, 再经过滤波电感和工频变压器将其转换为220V 的标准正弦波电压,采用这种方式系统结构简单,并且能有效地抑制波形中的高次谐波成分。
开关电源模块并联供电系统2011----A题 指导老师:时斌孙其昌 队员:08级张林 08级宋杰 09级汲建玲 学校:南京师范大学 学院:中北学院
摘要:本文介绍了直流均流源的原理,设计思路及方法,整个系统以MSP430单片机为控制器,控制均流,采用开关电源芯片LM2576为电源芯片。通过独立键盘控制电源电压的输出,其操作方便简单。两路电源能够在外接负载变化的情况下自动均流,整个系统具有电路简单,输出电压范围大,精度高,稳定可靠的特点,并具有过流保护及自动恢复功能,很好的达到了题目的各项要求。 关键词:均流源MSP430 LM2576 自动均流 Abstract :A DC current source was introduced in this paper . In this article we introduce a theory of a DC current source and how to design .The system is made up of MSP430 which play a role of microcontroller , and LM2576 as Power chip .the system is perfect in large output voltage range ,high precision ,high stability and in current-liminting and auto-resume . Keywords:current source MSP430 LM2576 Automatic Current
哈尔滨工业大学工程硕士学位论文 Abstract With the development of science and technology, mobile radars are playing an increasingly important role in modern warfare. Compared with traditional fixed radars, high maneuvering vehicle radars have remarkable advantages, such as high mobility, high position adaptability, high concealment and high survivability. In order to meet the requirements of high precision, high automation and high reliability for the on-the-spot docking of the on-board radar antenna system, an automatic position and posture adjustment and docking system for heavy haul and large travel space posture is needed to facilitate transportation. In this paper, a three degree of freedom redundant parallel mechanism which can be conveniently installed on a transport vehicle is proposd, it can be used to adjust the degree of freedom along the vertical axis and the degree of freedom that rotate around the horizontal two axis. Compared with the traditional non-redundant parallel mechanisms, the existence of the redundant actuated branch of the redundant mechanism can not only improve the bearing capacity and stiffness of the mechanism, but also overcome the singularity of the mechanism itself.When part of the branched chain of the redundant parallel mechanism is damaged or damaged, the mechanism can still maintain a certain load capacity. Redundant parallel mechanism fully combines the characteristics of high bearing capacity, high positioning precision of parallel mechanism and the advantages of redundant mechanism to overcome its singularity and improve security. At the same time, a full active force position hybrid control strategy is proposed in this paper to solve the problem that redundant parallel mechanism produces great internal stress during the movement process. This control algorithm effectively solves the kinematic coupling problem of redundant parallel mechanisms, and effectively controls the internal stress of the mechanism. First, the overall design of the three degree of freedom redundant parallel mechanism is designed according to the design target. Fully combining the advantages of parallel mechanism and redundant drive mechanism, this paper designs a three degree of freedom redundant parallel mechanism satisfying the vehicle installation and transportation adjustment, and analyzes and demonstrates the mechanism configuration of the mechanism. Secondly, this paper carries out further kinematic positive solution and inverse kinematics calculation to provide control basis for the position feedback control link of the system. Through simulation calculation, the working space of the mechanism is worked out, and whether the workspace of the mechanism meets the design