Med Weld TD2200梅达焊接控制器参数设置说明
1. 在断电情况下打开焊接控制器箱门,将主机板右上角j3插件从NORM插到PROG
2. 通电后在START OF IO MAP 下按上、下箭头键将光标移动到第7至17项将其修改为
7 INPUT 1 : BINARE SELECT 1/PILOT1
8 INPUT 2 : BINARE SELECT 1/PILOT2
9 INPUT 3 : BINARE SELECT 1/PILOT4
10 INPUT 4 : BINARE SELECT 1/PILOT8
11 INPUT 5 : BINARE SELECT 1/PILOT16
12 INPUT 6 : WELD INITIATE
17 INPUT 11 : FAULT RESET
29 OUTPUT 7 : NO FAULT
32 OUTPUT10 : FAULT
3.更改完后断电将主机板右上角j3插件从PROG插到NORM重新上电
4?上电后入图所示
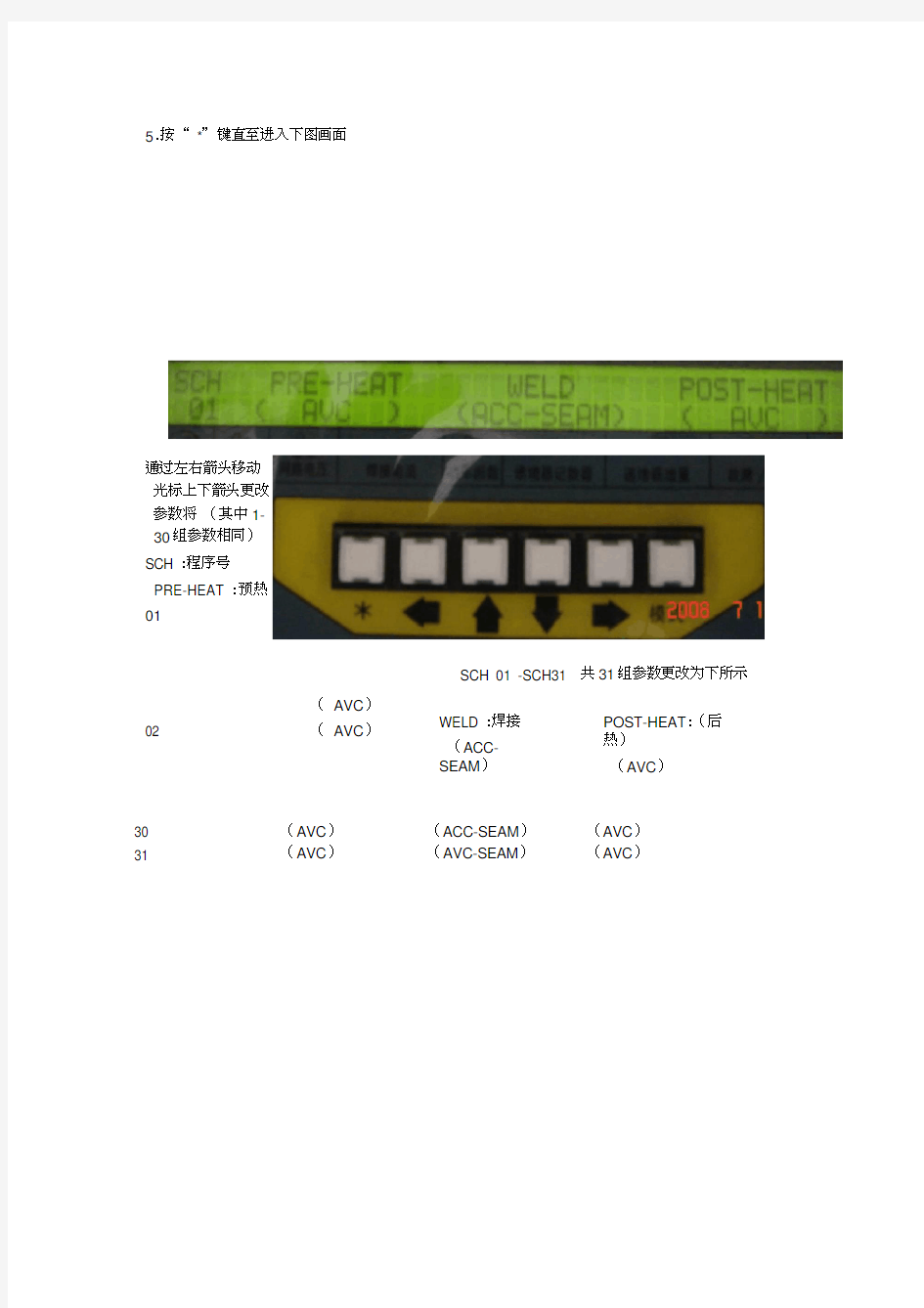
5.按“ *”键直至进入下图画面
通过左右箭头移动光标上下箭头更改参数将 (其中1-30组参数相同) SCH :程序号 PRE-HEAT :预热 01
( AVC ) 02
( AVC )
30 (AVC ) (ACC-SEAM ) (AVC ) 31
(AVC ) (AVC-SEAM ) (AVC )
WELD :焊接 (ACC-SEAM )
POST-HEAT :(后
热) (AVC )
共31组参数更改为下所示
SCH 01 -SCH31
6.按“ *”键回到第四步所示画面后按“ MODE ”键直至进入下图画面
将SCH 01- SCH 31共
31组改为如下所示 SCH VALVE RET TXR PRESSURE STPR FORG E
01 01 0 017 1 00 000 02 01 0 017 1 00 000 03
01
017
1
00
000
31 01
0 017 1
00 000
7.按“ MODE ”键回到第四步所示画面
其中液晶屏第一行第一组数字为程序号,第八组数字为电流大小,更改为如下所示
01 00 00 00 20 0 01 03000 00 00 00 20 00 00
02 00 00 00 20 0 01 03500 00 00 00 20 00 00
03 00 00 00 20 0 01 04000 00 00 00 20 00 00
04 00 00 00 20 0 01 04500 00 00 00 20 00 00
05 00 00 00 20 0 01 05000 00 00 00 20 00 00
06 00 00 00 20 0 01 05500 00 00 00 20 00 00
07 00 00 00 20 0 01 06000 00 00 00 20 00 00
08 00 00 00 20 0 01 06500 00 00 00 20 00 00
09 00 00 00 20 0 01 07000 00 00 00 20 00 00
10 00 00 00 20 0 01 07500 00 00 00 20 00 00
11 00 00 00 20 0 01 08000 00 00 00 20 00 00
12 00 00 00 20 0 01 08500 00 00 00 20 00 00
13 00 00 00 20 0 01 09000 00 00 00 20 00 00
14 00 00 00 20 0 01 09500 00 00 00 20 00 00
15 00 00 00 20 0 01 10000 00 00 00 20 00 00
16 00 00 00 20 0 01 10500 00 00 00 20 00 00
17 00 00 00 20 0 01 11000 00 00 00 20 00 00
18 00 00 00 20 0 01 11500 00 00 00 20 00 00
19 00 00 00 20 0 01 12000 00 00 00 20 00 00
20 00 00 00 20 0 01 12500 00 00 00 20 00 00
21 00 00 00 20 0 01 13000 00 00 00 20 00 00
22 00 00 00 20 0 01 13500 00 00 00 20 00 00
23 00 00 00 20 0 01 14000 00 00 00 20 00 00
24 00 00 00 20 0 01 14500 00 00 00 20 00 00
25 00 00 00 20 0 01 15000 00 00 00 20 00 00
26 00 00 00 20 0 01 15500 00 00 00 20 00 00
27 00 00 00 20 0 01 16000 00 00 00 20 00 00
28 00 00 00 20 0 01 16500 00 00 00 20 00 00
29 00 00 00 20 0 01 17000 00 00 00 20 00 00
30 00 00 00 20 0 01 17500 00 00 00 20 00 00
31 00 00 00 20 0 01 40 00 00 00 20 00 00
步进电机,伺服电机可编程控制器KH-01使用说明 一、系统特点 ●控制轴数:单轴; ●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制); ●最高输出频率:40KHz(特别适合控制细分驱动器); ●输出频率分辨率:1Hz; ●编程条数:99条; ●输入点:6个(光电隔离); ●输出点:3个(光电隔离); ●一次连续位移范围:—7999999~7999999; ●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态; ●升降速曲线:2条(最优化); ●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示; ●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止; ●手动运行功能:可调整位置(手动的点动速度和点动步数可设定); ●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度; ●程序编辑功能:可任意插入、删除可修改程序。具有跳转行号、数据判零、语句条数超长和超短的判断功能; ●回零点功能:可双向自动回到零点; ●编程指令:共14条指令; ●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作; ●电源:AC220V(电源误差不大于±15%)。
一、前面板图 前面板图包括: 1、八位数码管显示 2、六路输入状态指示灯 3、三路输出状态指示灯 4、 CP脉冲信号指示灯
5、 CW方向电平指示灯 6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。 后面板图及信号说明: 后面板图为接线端子,包括: 1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中: 脉冲————步进脉冲信号 方向————电机转向电平信号 +5V————前两路信号的公共阳端 CP、CW的状态分别对应面板上的指示灯 2、启动:启动程序自动运行,相当于面板上的启动键。 3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。 4、 (限位A)A操作和(限位B)B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。再例如要求步进电机在两个行程开关之间往复运行n次,等等。在这些操作中,我们事先并不知道步进电机的位移量的具体值,又应当如何编程呢?本控制器利用:“中断操作”,我们称之为“(限位A)A操作”和“(限位B)B操作”。以“(限位A)A操作”为例,工作流程为:当程序在运行时,如果“(限位A)A 操作”又信号输入,电机作降速停止,程序在此中断,程序记住了中断处的座标,程序跳转到“(限位A)A操作”入口地址所指定的程序处运行程序。 5、输入1和输入2通过开关量输入端。 6、输出1、输出2和输出3通过开关量输出端。 7、+24V、地—输入输出开关量外部电源,本电源为DC24V/0.2A,此电源由控制器内部隔离提供。 8、 ~220V控制器电源输入端。 输入信号和输出信号接口电路: 本控制器的“启动”、“停止”、“(限位A)A操作”、“(限位B)B操作”、“输入1”、“输入2”为输入信号,他们具有相同的输入接口电路。“输出1”、“输出2”、“输出3”称为输出信号。他们具有相同的输出接口电路。输入和输出电路都有光电隔离,以保证控制器的内部没有相互干扰,控制器内部工作电源(+5V)和外部工作电源(+24V)相互独立,并没有联系,这两组电源由控制器内部变压器的两个独立绕组提供。 开关量输入信号输出信号的状态,分别对应面板上的指示灯。对于输入量,输入低电平(开关闭合时)灯亮,反之灯灭;对于输出量,输出0时为低电平,指示灯灭,反之灯亮。 开关量输入电路:
一概述 智能控制器是框架式空气断路器的核心部件,适用于50~60Hz电网,主要用作配电、馈电或发电保护,使线路和电源设备免受过载、短路、接地/漏电、电流不平衡、过压、欠压、电压不平衡、过频、欠频、逆功率等故障的危害;通过负载监控,需量保护,区域连锁等功能实现电网的合理运行。同时也用作电网节点的电流、电压、功率、频率、电能、需量、谐波等电网参量的测量;故障、报警、操作、电流历史最大值、开关触头磨损情况等运行维护参数的记录;当电力网络进行通讯组网时,智能控制器可用为电力自动化网络的远程终端实现遥测,遥信,遥控,遥调等,智能控制器支持多种协议以适用不同的组网要求。 二基本功能 对于M型无任何可选功能(加*的项目)时其功能配置为基本功能,如表1所示: 表1 基本功能配置 2.1.3 通讯功能 通讯功能为可选项,对于M型没有通讯功能,对于H型通讯协议可根据需要选择为Modbus,Profibus-DP,Device net.
2.1.4增选功能选择 增选功能为可选项,M型,H型都可以选择增选功能配置,不同增选功能代号与增选功能容如表2所示。 2.1.5 区域连锁及信号单元的选择 “区域连锁及信号单元”为可选项,M型、H型都可以选择信号单元的功能配置,当信号单元选择为S2,S3时,控制器具备区域连锁功能。 2.2 技术性能 2.2.1 适用环境 工作温度:-10℃~+70℃(24h?平均值不超过+35℃) 储存温度:-25℃~+85℃ 安装地点最湿月的月平均最大相对湿度不超过90%,同时该月的月平均最低温度不超过+25℃,允许由于温度变化产生在产品表面的凝露。 污染等级:3级。 (在和断路器装配在一起的情况下) 安装类别:Ⅲ。 (在和断路器装配在一起的情况下) 2.2.2工作电源 由辅助电源和电源互感器同时供电,保证负载很小和短路情况下控制都可以可靠工作。控制器的供电方式有下面3种方式:
点焊机说明书
郑州中天建筑节能公司 点焊机说明书 一、产品简介 ZT—20型泡沫板装修网焊机是钢丝网架、聚苯、夹芯板(泰柏板)(舒乐板),聚苯保温墙板等轻体墙板网焊接的专用设备,可焊接丝径1.5—3.2mm的铁丝。本机采用新型的符合国际标准的CMOS数字集成电路,可随意调节焊接电流,焊接时间,保证焊件接牢固表面平整无焊坑,对泡沫板无任何损伤。而且降低操作人员的劳动强度,节省能源,成倍提高工作效率。售价仅为进口设备的1/5—1/6。 二、焊机参数 型号 ZT—20 电流电压 380V 焊接丝径 1.5—3.2mm 瞬时功率 20KVA 电流线径 62*2 输出电压 1.5—4.5V 焊接时间 0.01—2秒 三、焊机结构 焊机由机壳、焊接变压器、焊接控制器、可控硅交流开关电览及焊钳等几部分组成。 焊接时间调整要求:把焊钳调为:当两电极压紧丝后,活动手柄上的调节螺栓再碰到固定手柄上的开关。(调整电极在可调焊钳上伸出的长度或调整手柄上的焊接时间调节螺栓,即可达到调整的目的)。如不按此方法调接,将可能焊不牢甚至烧毁电极!即
焊头只能在压力时才能通电焊接。 四、焊机电气原理 本焊机由低压(12V)手控开关,集成电路控制板,可控硅模块,焊接变压器组成。控制板经过面板电流调节电位器改变强触发电路触发角达到调节焊接电流。当手控开关接通后使电路消零,由CMOS集成电路精确延时(0.01—2秒)后自动关闭(与手控开关接通时间无关)触发电路,使可控硅模块结束焊接过程。 四、操作说明 1、焊机安装时,必须可靠接地,不接地不允许使用。 2、接上电源两相380V,电压表显示380V。 3、打开电源开关,电源指示灯亮 4、空载试验在二次不短路时,短接手控开关,焊接指示灯亮, 则机器正常 5、焊接调节电流旋钮调至最大,时间旋钮调至最小闭合钳子看 焊接郊果,如焊接不牢,逐步调大时间旋钮直至焊接效果最好。如果时间调至最小,焊接电流依然大,则调小电流,直至焊接良好。 郑州中天建筑节能有限公司 公司简介 本公司主要生产:1设备类,泡沫板设备,干混砂浆设备,钢丝网架泡沫板设备,装配式建筑设备,保温与结构一体化设备,轻质隔墙设备,废泡沫造粒设备,废秸秆再利用做建材设
Honeywell-XL50控制器操作说明 1.可编程控制器和仪表 可编程控制器 XL20、XL50 (霍尼韦尔)可编程控制器是实现本系统控制策略的硬件构成,是控制系统的核心元件,它在系统中起到重要作用:如检测各传感器的当前值,动态调整个比例阀的状态,显示系统各参数等;还提供了一些控制系统内部参数的调整和系统参数的设定方式,用户应对其操作方法和性能达到熟练的程度,才能实现空调系统的各种操作。XL20为中文控制屏,不带通讯方式,操作方法雷同XL50。 取消键–返回先前的或上一级的屏幕;取消未被确认的操作;确认报警信息。 上移键–移动指针到前面的行 下移键–移动指针到下一行 右移键–移动指针到当前位置的右边 左移键–移动指针到当前位置的左边 增加键–每按一次增加数值一个单位或改变数字状态值到与当前状态值相反的状态值 减少键–每按一次减少数值一个单位或改变数字状态值到与当前状态值相反的状态值 确认键–确认已做的修改和进入下一个屏幕(指针在NEXT前)
对于KTF 空调系统的控制操作,主要是对系统参数的查看和更改(即对“系统参数操作键”的使用),该控制器的强大功能主要体现在:不但可以在线修改所有输入、输出点,而且也可以对控制系统的内部参数进行改变。 查看系统的输入、输出点状态(即查询新回风温度、露点温度、出口温湿度、风压及其各个阀门开度) 重要说明:对DDC 控制器的操作只能单键进行,严禁同时按压键位,以避免不必要的误操作,以免程序被初始化或删除。 按下系统“参数”操作键,屏幕出现“请输入你的密码”;密码输入才可以修改数据,比如压力等参数的设定等。用户只是查看的话就可以直接进入。 移动“光标移动”向上键,使光标停留在“****”上,再按下“输入键”,通过使用“数据增/减键”和“输入键”逐个将4位密码输入,完毕后屏幕左下角出现‘更改change ’字符;光标移动到change 字符上可以修改进入DDC 修改数据的密码,默认为‘3333’,如更改了密码,用户须牢记更改后的密码,每次参数修改操作都需密码。供应商无法破解密码,只能重新写入程序,如果不是要更改密码就从‘next ’字符进入。 下页next 按下屏幕将依次出现:模拟输入Analog input 、模拟输出Analog output 、逻辑输入Digital input ,右下角为next ,逻辑输出Digial output ,从下页next 处进入下一屏,上页back 为回到上一屏。前面所列出的几项为物理输入输出点,信号输入、控制输出都是通过物理点来实现的,所以要查询工艺参数或阀门状态都在这里,在这不一一列举,附件会对每个点进行说明。伪点(假设模拟点)Pseudo Analog ,蹦数位(假设逻辑点)Pseudo Digital 。 下图中带色标的栏在没有输入密码的情况将不会看到。
自动焊接机安全操作保养规程 一、操作者必须持电焊操作证上岗。 二、启动前的准备工作 (一)工作场所必须保持空气流通,防止由于工作气体的使用而造成用户缺氧。 (二)不可在工作场所堆放易燃物品,以防发生火灾。 (三)检查焊机外壳是否接地,电缆是否破损。 (四)检查焊机各接线点是否松动,是否有因接触不良而烧损的设备。 (五)确认保护气是否有气,管路是否漏气。 三、设备运行及相关操作 (一)按要求安装好电加热式气体减压器 (二)使用前必须先预热5-10分钟; (三)缓缓将气瓶上的阀门打开(速度约5度/秒),这时可观察到压力表的指针慢慢抬起,然后停在合适的刻度上。 (四)闭合设备电气箱空气开关对设备上电,检查电气箱和机身是否漏电(发现漏电须排除后进行下一步操作)。 (五)检查电气箱侧面指示灯是否正常,发现异常须排
除后进行下一步操作。 (六)检查减速箱是否加注润滑油,发现异常须按本减速机维护规范处理。 (七)进行设备空转,检查减速箱、齿轮、电机等传动是否有异响和过热,发现异常须排除后进行下一步操作。 (八)在操作面板上选择正确工作状态:“调试”档位适合本机手动控制作业;“自动”档位适合程序化自动焊接作业。 (九)调整好适当参数(工作台回转速度)和正确转向,启动设备进行正常操作和作业。 (十)可以在焊机的控制面板上进行功能选择和部分参数设定。 (十一)焊机的控制面板所对应的功能有指示灯显示,在使用过程中对应的指示灯被点亮即可进行对应的操作。(特别注意当焊机过热时,机内温度指示灯会被点亮,此时注意控制好焊机的使用时间或暂停使用该设备) 四、注意事项 (一)使用前仔细阅读说明书,对相应点进行润滑;未经润滑,严禁使用。 (二)在进行作业时,各电线缆连接必须牢固可靠,保证导电良好。 (三)程序控制器为按键操作,显示屏应避免油污、热
自动焊锡机 使 用 操 作 手 册 操作前请仔细阅读本操作手册(以免因操作失误给机器与个人带来的损害)
警告 ●本机器所使用的电源电压为220V,50~60Hz ,触摸电源会产生致命事故 ●本机器应放置在室内使用。 ●由于存在烫伤的危险,所以更换烙铁头或调机时,应关闭加温电源,待其冷 却至室温,再更换烙铁头或调机。 ●高温危险,切勿触及烙铁头与附近的金属部份。 ●切勿以敲击烙铁头方式来清除焊接残余,此举可能严重震损发热芯与降低定 位精度。 ●焊接时烙铁头冒烟,工场应有良好的通风设施。 ●使用烙铁时,不可作任何可能伤害身体或损坏物体的妄动。 本机器为全自动焊锡机,焊接简单容易。结合人机界面触摸操作显示屏更使的操作简 单;采用气动代替手工速度快且安全可靠。夹具配有强力磁铁可使得定位准确且可靠; 送锡丝采用步进电机驱动,出锡精确且可灵活控制。送锡速度、时间、回锡量均可调 节,工作效率显著提高。组合结构优化,无须另配焊台,铬铁头更换快捷方便,所配 烙铁发热体为日本进口陶瓷发热体,升温快且稳定,安全可靠。 1.规格: 发热体工作电压24V 烙铁温度200℃~480℃ 温度稳定±2℃ 烙铁头漏电压 <2mV 对地电阻 <2Ω 电机步进电机/直流变速电机 出锡速度约2.7mm/s~27mm/s(36o/s~360o/S) 出锡量0~150mm 锡线直径0.5、0.6、0.8、1.0、1.2、1.4、1.6(mm) 2.特点: ?烙铁发热体采用日本进口陶瓷发热体,RTD传感器控温,升温速度极快且温度稳
定,加热电压24V。 ?防静电设计,能避免敏感电子零件因静电而受损坏。 ?全自动与手动送锡模式可供选择。 4. 烙铁头的使用与保养; a;选择适当的温度,过高的温度会减弱烙铁头的功能、加快其氧化,相对缩短使用寿命。在能 够工作的情况下,尽量使用较低的温度,较低的温度也可以充分焊接,且可分保护对于温度敏感之元件。一般建议使用温度350~380度。 1.5mm以下小焊点350~360度, 2.5mm以上大焊点370~380度 B;烙铁头第一次使用时,务必先将烙铁头温度调至220度,让烙铁头的上锡部位充分吃锡,最 好是浸泡在锡堆里5分钟,然后在清洁海绵上擦拭干净,并把烙铁温度再次调至300度,重复上述程序,最后把烙铁温度调至所需使用温度进行使用。目的是在烙铁头上出锡层形成一层全面保护膜,防止其在高温状态下被氧化,导致热传输失效。 C;如果烙铁头的镀锡部分含有黑色氧化物时,可镀上新锡层,再用湿润的清洁海绵抹净烙铁头。如此重复清洁,直到彻底除去氧化物为止,然后再涂上新锡层。并定期地对烙铁头进行清洁。D;如不使用,应关闭电源,将烙铁头在清洁海绵上擦拭干净,然后上一层新的锡层,再次使用之前,还是将烙铁头在清洁海绵上擦拭干净,然后上一层新锡。 E;如果烙铁头变形或发生重蚀,应进行更换。 5.更换部件 1、更换烙铁头 反时针方向旋开烙铁头的金属锁紧螺帽①,取出烙铁铁头护套②与烙铁头③,将新的烙铁头装放护套中,旋上锁紧螺帽。 2、更换保险丝 1)从电源座上拔出电源插头。 2)旋也焊台背面的保险丝盖板。 3)取了损坏的保险丝,换上新的。 4)装上保险丝盖板。
Elektronikon 控制器操作说明书 第一章 概述 1.1介绍 Elektronikon 控制器基本参数 * 供电电压 24VAC +40%/-30% * 保护等级 前面板IP55 后面板IP20 * 工作温度范围 运行中 -10°C …..+60°C 存放中-30°C …..+70°C * 允许湿度 相对湿度95% * 机架 塑料面板覆盖金属组合 * 安装 电气系统柜面板 Elektronikon 控制器有以下功能: * 控制空压机 * 保护空压机 * 监控空压机工作维护状况 * 失电后的自动重启 * 自由起动 1.2空压机自动控制操作 控制器通过自动加载卸载空压机保持程序设定界限中的压力。可设定的数值例如加载卸载压力,最小停止时间等。 控制器在电源供电可能不足时,会停止空压机,在压力可能减小时,也可以自动起动空压机。万一卸载时间太短,空压机会保持运行以阻止太短的停顿时期。 1.3保护空压机 停机 Code 2205 126602 Edition 08/2005
几个传感器提供给空压机进行检测。假若这些测量值超出了控制器设定的停机警戒线,空压机将被停下。同时屏幕1将会立即显示停机消息,以及报警灯2将会闪动。 停机报警 停机报警警戒线是可设定的,低于最低停机警戒线的报警届限。假若传感器测量值超出了控制器设定的停机报警警戒线,屏幕1将会立即显示报警消息,以及报警灯2将会闪动。 报警信息会很快随着报警条件的消失而消失。 失电后的自动重启 控制器固化了空压机失电后的自动重启功能,根据需要设置将该功能激活。 自由起动 给予起动命令后(通过控制器自动起动或是手动起动),进入自由起动操作。
毕业设计方案 题目异型管自动焊接机 学院机械工程学院 专业机械工程及自动化 班级机自1000班 学生 学号 指导教师曹树坤 二〇一四年四月十三日
学院机械工程学院专业机械工程及自动化专业 学生学号 设计题目异型管自动焊接机 一、选题背景与意义 1、国内外自动焊接发展背景 我国在焊接领域起步较晚,五六十年代随着重工业的发展,焊接设备也主要从前苏联引进。发展到同苏联断交的七十年代,我国才陆续加强了在焊接领域的重视,建设了主要的焊接设备制造厂。在发展初期,我国生产的焊接设备大多是比较简单的焊接操作机、滚轮架、变位机、翻转机等,多数都是人工或少数的半自动性质,在自动化程度上比较低。进入80年代后,在我国大量引进成套焊接设备下,促使我国在焊接方面的成套性、自动化、设备精度等有了很大的提高。1996年我国焊接机器人的数量到2001年达到1040台,其中弧焊机器人占49%,点焊机器人占47%,在自动化焊接技术方面如机械控制技术、PLC控制技术以及数控系统,焊接的自动化程度有了很大进步。 在焊接领域,我国同国外先进国家还是有很大差距。在20实际80年代初期,工业机器人的应用在先进工业国家开始普及,1996年年底全世界服役的各类工业机器人超过68万台。其中,焊机机器人大约为一半以上。尤其说随着信息技术、计算机技术、自动控制技术的发展和应用,近10年来,在发达的工业国家,焊接设备的发展更是飞速。如英、美、德和日本等过均有相当规模、先进的焊接设备生产企业。在2001年的第十五届实际焊接与切割博览会上参展的焊接设备厂商多达百家。当下,多数焊接设备采用最先进的自动控制系统、智能化控制系统和网络控制系统等。广泛采用焊机机器人作为操作单元,组成焊接中心、焊接生产线、集成制造系统。 2、选题的意义与目的 在绿色观念的倡导下,由于焊接本身对环境和人体带来的伤害,加之我国当下焊接的手工化依然广泛存在,因此自动化焊接尤其是plc控制的自动焊接将会是大中型企业流水线焊接的确实需要,焊接作为机械制造业中仅次与装备加工和切削加工的第三大加工作业,对其进行机器人柔性加工技术及其相关的控制器PC化,网络化和智能化的应用研究已成为焊接自动化发展的必然趋势。 二、设计内容 1、设计内容研究 本次设计是异型管自动焊接机设计,在设计过程中,要求我们运用机电的知识完成,其设计的内容主要包括,机械手的设计、焊接机床的设计、异型管夹具的设计、电气系统设计等内容。此次设计的焊接机械手实际是5-6自由度的关节机器人。采用步进电机驱动、微机控制,结构紧凑,工作范围大,动作灵活,底座支撑部分采用机床结构设计,异型液压油管(水平面内在不同位置有弯度的油管)通用夹具设计。
电动阀门智能控制器说明书
————————————————————————————————作者:————————————————————————————————日期: 2
--------------------------------------------------------------------------------------------------- 产品的不断升级可能导致部分数据的变化,如有改动,恕不另行通知。KZQ07系列电子伺服式电动阀门智能控制器 使用说明书 本定位器出厂之前已对其输入、 输出性能进行严格标定,接线后一般 KZQ07-1A KZQ07-2A
尊敬的用户,请在安装本控制器前请仔细检查以下内容: 1、检查执行器的内部位置限位切换开关,确保限位开关在区域内工作,有无异 常现象,能否达到开度的零位与满位,确认限位开关能正常工作。 2、接线前请检查执行器中电位器有无强电,用万用表分别测量电位器三接线端 子,确保该电位器与电机控制端子绝缘,电位器在执行器运转过程中的阻值变化正常,排除断点等异常现象。 3、定位器与执行器间连线要正确,仔细检查两者端子的对应关系,特别注意定 位器电源、输入信号与输出信号接线,切莫把电源接至弱点信号端,同时用仪表测量控制输入信号在定位器接受信号范围内。 4、如与执行器配套使用,在严寒、酷热、高温的环境下开箱时,仪表应于现场 存放3小时以上方可进行标定效验。 目录 一、概述-----------------------------------------------------------------------------2 二、主要技术指标-----------------------------------------------------------------2 三、定位器控制原理--------------------------------------------------------------4 四、定位器面板与接线-----------------------------------------------------------5 五、基本操作方法-----------------------------------------------------------------9 六、标定接线及操作方法--------------------------------------------------------9 七、错误代码列表-----------------------------------------------------------------11 八、附录-----------------------------------------------------------------------------12 如客户所购买指明配置的本公司Z型(机电一体)执行器,无需对执行器转角标定,接线无误即可正常使用。 一、概述: KZQ07系列电动阀门智能定位器是专门为电动执行器配套开发的数字控制系统,采用汽车工业专用的微处理器作为核心处理单元,是真正意 义上的智能数字采集控制系统。可直接安装在电动执行器的接线盒内或以 DIN导轨方式固定在外,无须专门的控制箱,体积小,安装方便。 KZQ07系列电动阀门智能定位器使用固态可控硅进行无触点控制电机,简单可靠,配合高分辨率位置传感器,不但控制精度高,控制准确, 且寿命长,可靠性高。另外控制系统无须保持电池,可在完全停电后再次 通电时,自动识别出执行器位置的变化。 KZQ07系列电动阀门智能定位器能直接接收工业仪表或计算机等输出的4~20mA DC信号(其它输入信号类型可在出厂前定制),与安装有位置 反馈传感器的电动执行器配套,对各种阀门或装置进行精确定位操作,能 3
目录: 一、使用安全指导 1.1注意事项 (2) 1.2使用安全注意事项 (2) 二、机器概述 2.1 机器基本参数 (3) 2.2本机各部件的组成 (3) 2.2.1超声波发生器(机箱)……………………………………………………‥‥4 2.2.2焊接机机体(机架)……………………………………………………………5-6 2.2.3 超声波振动系统…………………………………………………………………6-7 三、超声波发生器的使用………………………………………………………………………8-9 四、线束的焊接放置 (10) 五、安装详述 (10) 六、使用步骤 (11) 6.1 开箱 (11) 6.2 压缩空气进气源 (11) 6.3 焊接机和发生器之间连接 (12) 6.4 启动发生器 (13) 七、调整 (14) 7.1 焊头的更换调整………………………………………………………………14-15-16 7.2 左、右夹块间隙的调整 (17) 7.3线束宽度、高度调节 (18) 7.4 焊接面的更换 (19) 八、拆装系统的检测、拆装与更换.....................................................................19-20 十、维护与保养 (21)
一、使用安全指导 1. 1 注意事项 在启动和使用本公司超声波焊接机之前,请务必仔细阅读以下注意事项! ●使用手册会为你详细介绍超声波焊接机的正确使用方法,请您务必严格遵守执行 ●安装和使用本机必须由经过相关培训的专业人员进行。 ●在工作运行过程中,请您务必不要接触焊接工具头。超声波振动有可能导致严重的皮肤 灼伤。 ●操作人员经过适当培训后,才允许使用超声波焊接机。 ●本机在维护和检修前,应先断电源,防止误操作。维修和保养工作必须由受过专门培训的技术人员来完成。 ●未经设备生产厂商的许可,不得擅自打开机箱,调整机器。否则生产厂商的所有保证将自动失效。 ●操作人员均须严格遵守操作手册的安全和使用事项。 1.2 使用安全注意事项 ●在启动和使用之前,应先确保电缆线是否连接正确,确保超声波 焊接机正常接地。 ●基于使用安全的目的和避免发生损伤请勿将金属钢销或类似的 材料放置在焊接工具之间。 ●请经常的按时对焊接机及焊接工具进行维护保养,确保机器工作 在正常状态下。 ●在焊接过程中出现一些异常的情况、声音,为了避免机器的损伤, 请立即停止使用,由相关的专业人员进行维护或联系售后人员。
L-4000智能控制器使用说明 L4000智能控制器基本参数 工作电压:220V 外型尺寸:390*235*80 (H*W*D) 最大负载:6000W 单路负载:可调灯光1500W 开关灯光3000W 功能简介 L-4000灯光/空调智能控制器是专为KTV设计的一款具备灯光亮度调节、中央空调控制、可编程的智能型灯光/空调控制器。 1、设有6路大功率可调光及4路大功率继电器,满足各种灯光应用的需求 2、可直接通过串口与机顶盒或电脑连接 3、可直接连接灯光控板,脱离点歌系统及中控盒独立运行 4、可对任一模式下的灯光状态进行编程,实现任意灯光搭配 5、灯光控制器上可直接按键操作选择灯光模式及调节灯光亮度 6、灯光亮度均衡,通过在不同模式下设置不同的亮度,实现场景效果切换,减少了灯光的开关次 数,延长灯光使用寿命 7、可外接遥控器对灯光进行遥控控制(选配) 8、中央空调智能控制,配合点歌系统可实现远程开关空调 9、配盒空调墙板通过温度探测,可智能控制风机及阀门的开关,减少能源浪费 10、设有2组空调控制 11、根据室温与设定温的比对,自动调节风速 12、采用串口光电隔离技术,避免设备间的互相干扰 灯光控制的设置 一、灯光模式对应组的编程 先关闭灯光控制器电源,按住设置及确认键不放,打开电源,等待约1秒,灯光控制器显示01并闪烁,表示01组,按△或▽键选择所要编程的组。 1、选择需要编程的组按△或▽键选择需要编程的组,按确认键进入该组编程设置; 2、设置该组对各路灯光的控制状态数码管显示J1,对应指示灯指示出该模式下灯光的控制状 态,亮表示控制,闪烁表示不控制,不亮表示强制关。按▽键选择要设置的灯光,J1-JA表示灯光控制器的10路,按设置键进行设置,按确认键进入下一步设置; 3、设置组的开关模式显示H1表示固定模式,显示H0表示开关模式(固定模式:例如,当按 K歌时1、2、3路亮,再次按K歌时还是1、2、3路亮;开关模式:例如,当按K歌时1、 2、3路亮,再次按K歌时1、2、3路灭),按设置键进行选择,按确认键进入下一步设 置; 4、设置组的亮度继承方式显示L1表示固定亮度,显示L0表示继承亮度(固定亮度,例如: 进入K歌模式后,将其亮度由60调到80,第二次进入K歌模式时它的默认亮度还原为60; 继承亮度,例如:进入K歌模式后,将其亮度由60调到80,第二次进入K歌模式时它的默认亮度为80)。按设置键进行选择,按确认键进入下一步设置; 5、设置组的默认亮度数码管显示亮度值,且两个小数点都是亮的,按△或▽键调节到想要的 默认值,按确认键进入下一步设置;
●电焊机的使用说明及注意事项; 1使用前必须检查电焊机和导机绝缘是否良好,接地状况和电把是否合理。一次线严禁电线落水和平拉在地面上,将一次线用绝缘物悬挂起来,一次线不能超过2----3米。 2电焊机不准雨水浸湿,不准放在潮湿地方,离火近的地方。 3电焊机一次线和2次线严禁同气焊胶管混合交错在一起。一次线、焊把和导线必须绝缘好,禁止用属物当地线和电焊机相连接。一次线和2次线接头不准超过2个。 4电焊机导线严禁和氧气瓶,乙炔瓶接触,电焊机电表必须完整。禁止在危险区域工作,如化学品库,易燃物,瓦斯气体等允许距离要大于己于人10米。 5不准在储油器和变压器上焊接。焊接盛油脂,化学品的容器时,必须哟用火碱水洗涤后,才能使用,必要时通知安全技术人员检查后,方可工作,在密封容器中工作时,必须采取通风措施,照明灯不能大于己于人12伏,并有转人监护方可工作。 6合闸必须戴好绝缘手套,不准用电火花点烟和引火。 7两台电焊机之间距离为1,5米,使用电焊机空载电压直流焊机为100伏,交流焊机为80伏,焊机使用温度不能超过85度。 ●安全使用电器设备的安全使用注意事项 1各种电器设备必须按装接地线和漏电保护器。室外照明线必须用水线,起动开关必须要有绝缘措施,高低压开关前面要放绝缘板(木地板、绝缘胶板)高压起动开关要戴绝缘手套。严禁擅自拆动和修理一切电器设备。 2任何电器设备上的标牌,除原来使用放置人员或负责运行人员外其他任何人员不得移动。 3 不可靠近或接触任何有电设备的带电部门,湿手不可接触电器设备,电灯、电动开关等有破损不完整,或带电部分外露,应立即找电工修好,否则不准使用。 4、如发现有人触电,应立即切断有关电源,是触电人脱离电源,进行抢救。 5遇有电器设备着火时,应立即将有关电源开关关闭,然后进行灭火。对有可能带电电器设备以及发电机,电动机应使用干式灭火器、2氧化化碳或四氯化碳灭火器灭火,对油开关变压器(已隔绝电源)可使用干式灭火器、四氯化碳等灭火器灭火,不能扑灭时再用泡沫灭顶之灾器灭火,不得已可用黄沙灭火,地面绝缘油着火应用黄沙灭火。 6电器设备检修时,必须挂停电牌。高低压电源开关因故障掉闸时,没有弄清原因排除事故前,不得合闸,防止意外事故发生。电器设备检修时,停电以后要加装地线或三项短路接地,检修完成以后,要拆除地线,在多处接地时,检修完成以后要检查地线组数后方可送电。 7对高大建筑物和使用机械运转设备、电器设备要有放雷措施,防触电的地线、电源保护接零设施。 ●天车工的操作规程 天车的十不吊 1超过额定负荷、歪拉斜挂不吊。 2指挥信号不明,重量不清、光线暗淡不吊。 3吊索和附件捆缚不牢、不符合安全要求的不吊。 4行车吊挂重物直接进行加工的不吊。 5起重机械的安全装置失灵时不吊。 6工件上站人或有浮动物品不吊。
微电脑控制器操作手册https://www.doczj.com/doc/d615474237.html,work Information Technology Company.2020YEAR
微电脑程序控制器 操作手册
在使用本控制器之前,请先确定控制器的输入输出范围和输入输出种类与您的需求是相符的。 1. 面板说明 1.1 七段显示器 PV:处理值(process value),红色4位显示 SV:设定值(setting value),绿色4位显示 1.2 LED OUT1 :第一组输出(Output1),绿色灯 OUT2 :第二组输出(Output2),绿色灯 AT :自动演算(Auto Tuning),黄色灯 PRO :程式执行中(Program),黄色灯 ----- 只适用于PFY系列AL1 :第一组警报(Alarm 1),红色灯 AL2 :第二组警报(Alarm 2),红色灯 MAN :输出百分比手动调整(Manual),黄色灯 ※注意:当发生错误(Error)时,MAN灯会亮,并将输出百分 比归零 1.3 按键 SET :设定键(写入设定值或切换模式) :移位键(移动设定位数) :增加键(设定值减1) :减少键(设定值加1) A/M :自动(Auto)/手动(Manual)切换键。 自动:输出百分比由控制器内部演算决定 手动:输出百分比由手动调整OUTL(在User Level中)决定 2 自动演算功能(Auto tuning) 2.2 需先将AT(在User Level中)设定为YES,启动自动演算功能。 2.3 自动演算结束后,控制器内部会自动产生一组新的PID参数取代 原有的PID参数。 *自动演算适用于控温不准时,由控制器自行调整PID参数。
汽车车身自动化焊接生产线 1.前言 A3车型是奇瑞公司的战略转型车型,为打造五星安全品质,对该车型提出更加苛刻的质量要求。焊装车身的制造水平提高依赖于先进的焊接设备,公司引进柯马公司的自动化生产线,完成车身下部和车身总成的焊接任务,以符合更高的焊接质量要求。 第一部分 A3自动化生产线设计纲领 第二部分电气控制系统 第三部分点焊机器人系统 第四部分其他系统 4.1滚床系统 4.2OPENGATE 4.3机械化输送悬链和BUFFER 4.4车型识别和生产管理系统 4.5激光检测系统 4.6安全系统 第一部分A3自动化生产线设计纲领 主要负责A3三厢和A3两厢两种车型白车身总成的生产,下部线和主焊线是混线自动化生产线,年产能约为20万辆。 车身下部线完成发动机仓、前地板、后地板等总成零件的拼装焊接工作,适应车身下部高强度的焊接要求。主要由27台机器人完成焊接工作、零件抓取,整条线还包括自动化输送悬链,零件缓存器。 主焊线主要是完成车身下部、侧围、顶盖、包裹架等总成的拼装焊接工作。由滚床、OPENGATE、和31台机器人组成。 主焊线OP130工位为在线激光检测系统,由4台机器人带动激光检测系统,对车身尺寸关键点进行在线检测。 第二部分电气控制系统 A3自动化生产线共有两个部分组成,分为车身下部线和主焊线,有5条空中输送线,工艺流程为发动机仓、前地板、后地板分别由3条输送线输送至车身下部线,车身下部经空中输送至主焊线,然后通过空中输送线输送至调整线。 整条生产线有车型识别系统一套,辊床一套、涂胶设备8套、COMAU机器人62台,采用SICK的安全保护设备,采用带有安全集成功能的CPU 416F-2的西门子PLC。控制部分的采用工业以太网和PROFIBUS(现场总线)连接,见图控制部分示意图。
ST45-M系列智能控制器说明书 一、用途:ST45-M系列智能控制器是智能框架式断路器配用的核心控制元件,该控制器可以显示设备或电网的工作电流、工作电压(带电压显示型),并根据负载电流的大小分别实现各种保护,使线路和电源设备免受过载、短路、接地等故障的危害。按约定的保护方式断开控制回路,精度高、可靠性好,还有负载监控、故障报警、故障查询、在线试验、现场编程、密码设定等辅助功能。 二、符合标准本产品符合GB/T 14048.1-2000《低压开关设备和控制设备总则》和GB14048.2-2001《低压开关设备和控制设备低压断路器》,同时符合IEC60947-2《低压开关设备和控制设备第二部分低压断路器》的要求 三、主要功能 ■过电流保护功能 △过载长延时保护功能 △短路反时限保护功能 △短路定时限保护功能 △短路瞬时保护功能 △接地电流保护: 三极产品接地电流保护可关断,四极产品接地电流保护与零序电流保护可选择其一。 △零序电流保护 四极产品具有零序电流保护功能,该功能可以选择关断。 △各种保护的优先级如下: 短路瞬时保护→定时限保护→长延时保护→接地保护→零序保护 ■负载监控功能: 有方式一和方式二两种监控方式:使用方式一时,当负载电流大于监控设定电流时,一对
触点闭合,用户可使用这对触点切除不重要负荷;如电流继续维持在大于监控电流状态,则又 一对触点闭合,用户使用该触点再切除一部分负荷,达到监控电流的目的。使用方式二时,当 负载电流大于监控设定电流时,一对触点闭合,用户使用这对触点切除不重要负荷;如电流继 续维持在大于监控电流状态,则又一对触点闭合,用户使用该触点再切除一部分负荷,此后如 经过一段时间延时后,负载电流降到监控电流以下,则另外一对触点将使已切除的负载重新投 入工作,达到电流监控的目的。 ■欠压保护功能:如选择带电压显示型控制器,用户可以选择是否使用欠压保护功能,当选择 该功能时,可通过控制器本身实现对电路三相端电压的欠压控制。欠压脱扣器的设定电压值和 延时时间可以在设定页内由用户自行设定。这样可以不再使用原框架断路器的电磁式欠压脱扣 器。但是,使用智能控制器进行欠压保护时,控制器1、2端必须配有工作电源(该电源要来自 主回路以外的电源)。 ■通讯功能:H型控制器配有RS485通讯接口,用户可按RS485协议从指定单元中存取数据。 ■辅助功能 △故障记忆:可以在故障查询页内查找上一次故障动作时的故障相,并记录故障动作电流与动 作时间。 △电压表、电流表功能:该控制器可以实时显示运行回路的电流值、电压值。 △MCR功能:该控制器具有上电时的短路保护功能。 △电子密码锁定功能:凡与设定有关的参数均有密码保护。如需要修改参数,必须将密码核对 正确后才能进行修改,以防非专业人员误操作。 △电子铭牌:上电后,该控制器将显示断路器的铭牌数据和参数。 △报警功能:当负载电流大于监控电流或整定电流时报警信号灯亮。 △试验功能:可以在断路器不工作时,试验控制器的机械特性与电气性能。如在现场编程页内 选择试验脱扣,则用试验页内lt(lt>lr1)电流试验时,控制器脱扣。如选择试验不脱扣,则用试验电流试验时,控制器不脱扣,但控制器将此故障记忆并显示。 △背光功能:仅M、H型有此功能,当控制器工作电源上电时或有任何按键操作时,背光灯亮。 如无键盘操作,时间超过1min,背光灯自动熄灭,通过上电或触动按键可将背光灯点亮,以便 在黑暗或无光照的环境中阅读页面。
自动电焊机操作说明书 一、安全须知 1、本设备要求操作人员应有熟练的焊接操作技术及一定程度的电工安全知识,所有作业必须接受专业培训后进行。 2、必须熟悉设备的“操作”和“急停”按钮的位置,了解焊机的功能及相关的安全预防措施。 3、操作人员操作前必须认真阅读使用说明书,按程序操作,非操作人员不得擅自开机操作。 4、操作人员必须佩带人体安全预防用品,如安全帽、护目镜、防火衣,安全手套等。 5、不得穿戴宽松衣服操作,不得使用披肩、手镯等物品,以免带来隐患。 6、本机要有标准的安全接地,操作人员应与大地和工件绝缘。 7、保证焊接回路安全可靠。 8、本机焊接时有强光并伴有烟气出现,烟气有害健康,工作场地应有通风,排气设备。 9、焊接地的飞溅会引起火灾,因此工作场地不能有易燃物品。 10、设备运行时不能对设备加注润滑油和维护。 11、定期检查螺栓连接部位,防止松动,悬空部件下面严禁站人。 12、电气柜、焊接电源等带强电部位,通电工作时,不得违规操作和接触,以防止触电。 13、非具有专业资格的人员不得维修和改动本设备。 14、操作和维修时操作人员需要登高时,务必注意安全。登高作业时,必须登梯上下,并应检查及固定好梯子,严禁悬空攀爬跳跃,防止跌下摔伤。 二、操作和使用 1、根据焊接的材质,厚度,选用焊丝及保护气体来确定焊机的程序,在焊机电源上
设定。 2、根据工艺要求,接好混合气体并调整好气体流量。 3、开启空压机开关,使空压机工作。 4、将电器箱上的电源开关合上,电源接通,电源指示灯亮。 5、在操控盒上按对应的按钮,检测龙门架移动,行走台车左右移动,拖板升降、气缸伸缩等,注意限位开关是否正常工作,若发现有任何一路发生卡阻及异常情况,要立即使用急停按钮,切断电源,使所有的接触器都处于断路状态,然后维修,确保人身安全。 6、将操控箱面板上的状态开关至调试位,提升焊枪,跟踪器立柱和拖板至合适位置(以焊枪、跟踪器气缸下放时不碰到焊接工件稍高一些为准),选择好机头移动方向;根据工艺要求,使用速度调节旋钮,调整好机头移动速度,即焊接速度;根据工件位置,选择门架前或后移动,下放焊枪、跟踪器气缸,注意焊枪跟踪器不会碰工件。 7、将开关置焊接状态,焊枪前端焊缝跟踪器探头自动找焊缝,找到最合适的位置时,给出信号,由cpu控制plc发出焊接启动信号,气体保护焊机开始焊接,当焊机开始焊接的同时,横梁小车按照预设置的方向及速度开始行走,当焊接快到结束位置时,跟踪停止,继续自动焊接直到结束位置时,按停止键焊接结束,再逐一停止气保焊机,横梁小车行走电机。 8、断弧保护,在焊接过程中出现断弧(堵丝,缺丝,焊机故障等),控制系统会检测这些不良信息,可以使焊接自动中断由人工排除故障后重新启动。 9、焊机在作各种功能的运行时不得出现抖动,停顿或异常声响,如有应立即停车,检查排除故障。 10、设备使用完毕后,将焊接头移至合适位置,然后切断电影。 三、维护保养及注意事项 1、每台设备必须接地线,以保障安全。 2、当设备发生故障时,应立即切断电源,然后进行检查维修,方可继续使用。 3、定期检查各直线导轨、滑块。涡轮蜗杆减速机,齿轮减速机,齿轮、齿条等传动部件,并加注润滑油或润滑脂。 4、使用前对行走轮轴承,直线导轨滑块,升降及焊接机头移动部件的齿轮、齿条,焊接机头外的手动调节机构部件检查润滑情况。 5、发现传动机构有不正常现象,如振动、异常声响,卡阻等,应立即停止使用,检