北京科技大学
机械动力学大作业
基于Proe的活塞连杆机构的运动学仿真
学院:机械工程学院
班级:机研111
姓名:陈欣欣
学号:s2*******
2012年4月日
基于Proe的活塞连杆机构的运动学仿真
陈欣欣
(北京科技大学机械工程学院北京:100083)
摘要:活塞连杆是机械行业中常见的曲柄滑块机构,应用该机构最典型的实例
就是发动机气缸,它可以将燃气能源转换为机械动能。广泛的应用到动力机械
的动力源,如汽车、轮船、飞机等。本文主要对活塞连杆机构的运动仿真,进
一步分析其运动是否合理、结构是否发生运动干涉等技术信息。
关键字:自由度;碰撞检测;干涉;
Abstract
The piston rod is in the machinery industry common crank slider mechanism, application of the most typical example is the engine cylinder, it can be a gas energy is converted to mechanical energy. Widely applied to mechanical power source, such as automobiles, ships, aircraft and other. This paper focuses on the piston connecting rod mechanism movement simulation, further analysis of its motion is reasonable, whether the structure motion interference and other technical information.
1序言
2活塞连杆模型
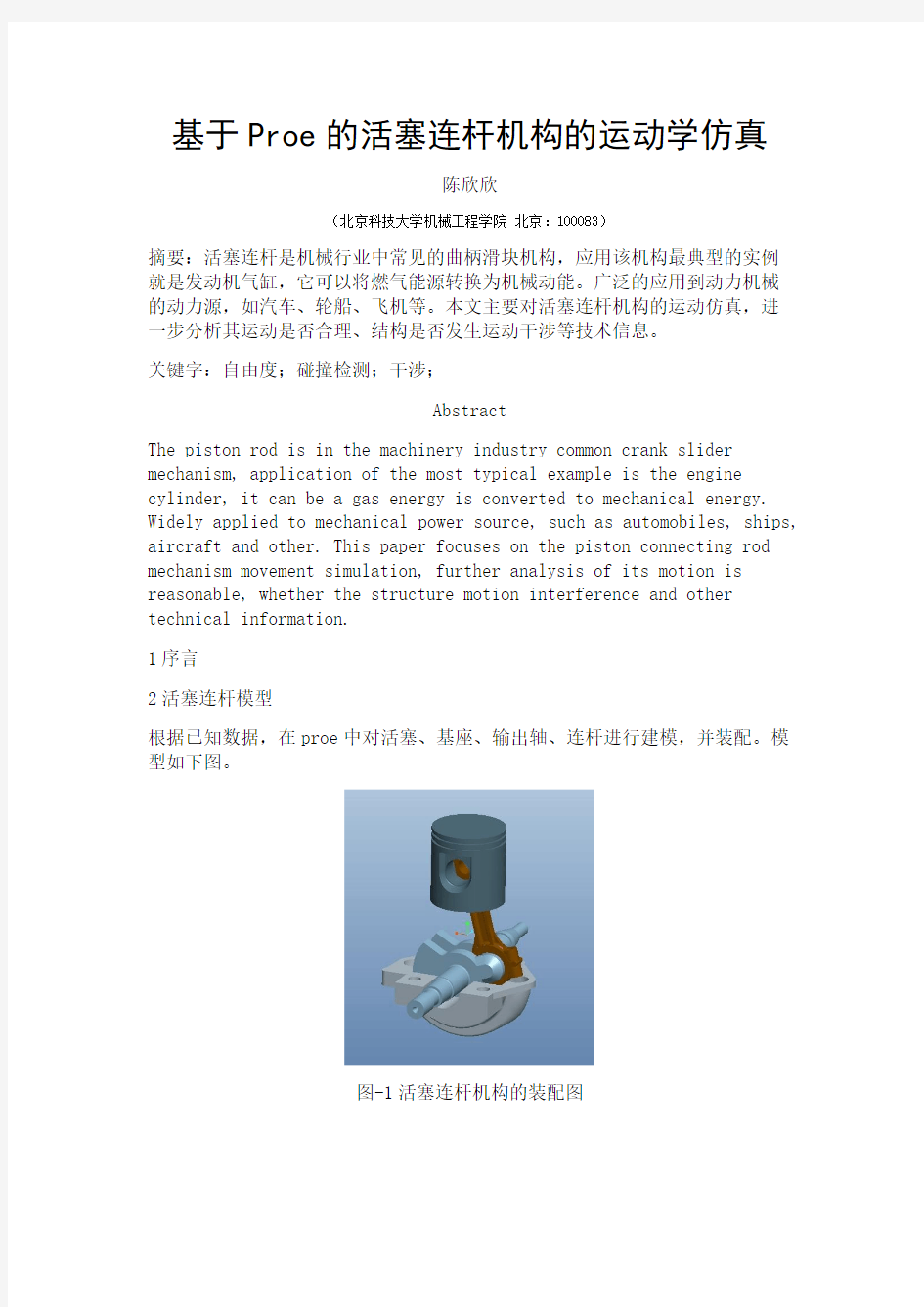
根据已知数据,在proe中对活塞、基座、输出轴、连杆进行建模,并装配。模型如下图。
图-1活塞连杆机构的装配图
3、机构设置
在对机构进行设置之前,需要对机构进行检测,如果机构是符合设计意图,那么就可以对机构设置动力源和运动环境等模型元素。
1)机构检测
2)添加伺服电机
4运动分析
1)自由度分析
从理论上,一个自由度代表只要确定机构中任意一个活动机构的位置,就可以确定机构中所有其他机构的位置。从数学意义来讲,整个机构只需要一个变量就可以确定下来。从实际应用的观点来看,可以认为一个有一个自由度的机构,只需要一个伺服电动机就能驱动它。
2)运动仿真
选取连杆元件,对其进行包络分析。如图2所示。
包络分析后在“AnalysisDefinition”选项中,进行全局碰撞检测,这样在仿真中如果发生碰撞冲突时则会响起消息铃声。
3)分析测量结果
a.对活塞的孔轴线进行测量,得到活塞轴线位置曲线如图所示。
b.对销轴进行测量,得到活塞运动的速度和加速度曲线如果所示。
1建立分析模型
分析条件:活塞顶部受到2500K、9Mpa高温气体作用,在复返1千万次运行的疲劳安全系数。活塞为A16061合金铝,抗拉强度为290MPa,屈服强度为240MPa,疲劳强度为95MPa,热传导为167W/m℃。
(1)简化模型并分配材料
简化模型时,不影响分析结构的特征简化掉,尽量不能出现锐角等难
以进行网格划分的结构缺陷。否则容易产生分析错误。如果出现不可
避免的锐角,可采用倒圆角工具使其圆滑过渡。简化后的模型,尽量
结构简单,以减少分析中产生的错误和降低计算分析时间。
图-简化后的模型
(2)定义约束
在孔的内表面添加轴约束,且为对称约束。
(3)创建载荷
在活塞的上表面定义9MPa的载荷。
2 结构分析
1)静态分析
条件:活塞在约束条件下,受到9MPa压力作用是,计算其应力和变形。
得到的应力曲线图和变形曲线如下图所示。
2) 模态分析
变形条纹图
变形曲线
变形线框图
3)疲劳分析
寿命所需强度为107,正在加载为恒定振幅,振幅类型为“峰值—峰值”,对前一静态分心“analysis1”进行疲劳分析。
寿命条纹图和破坏条纹图如下
安全系数条纹图
和寿命置信条纹图如下
结语
机械优化设计在matlab中的应用 东南大学机械工程学院** 一优化设计目的: 在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 二优化设计步骤: 1.机械优化设计的全过程一般可以分为如下几个步骤: 1)建立优化设计的数学模型; ' 2)选择适当的优化方法; 3)编写计算机程序; 4)准备必要的初始数据并伤及计算; 5)对计算机求得的结果进行必要的分析。 其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。 2.建立数学模型的基本原则与步骤 ①设计变量的确定; 设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。设计变量的全体实际上是一组变量,可用一个列向量表示: - x=。 ②目标函数的建立; 选择目标函数是整个优化设计过程中最重要的决策之一。当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。 目标函数的一般表达式为: f(x)=,要根据实际的设计要求来设计目标函数。 ③约束条件的确定。 一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。 由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为 …
基于Solid Edge的高级机构运动仿真 在机构设计中,分析输入/输出构件运动的相关性是比较困难和繁琐的,但若能方便地得到输入/输出构件及相关中间构件的运动曲线,解决这类问题就会容易许多。 Solid Edge 具有功能强大的三维造型模块和装配模块,而Dynamic Designer/Motion for Solid Edge实现了Dynamic Desinger和Solid Edge的无缝集成,用户不必离开自己所熟悉的Solid Edge界面,就可以对所设计的装配体进行运动仿真。 Dynamic Designer产品由Simply Motion、Motion和Professional组成,用户可以根据设计的复杂程度进行选择,也可以根据实际应用的情况逐步升级到更高一级的产品。在机构设计中,熟练使用以上模块,完成零件的三维实体造型,模拟整个机构的装配,分析装配干涉情况,进而实现运动模拟、运动干涉分析和动力分析,即可实现机构的精确设计,优化机器的性能和可靠性,从而减少从设计到产品的开发周期。 本文以单、双万向联轴结机构为例,简述了运用以上模块进行机构的装配、运动模拟及运动分析、动力分析的过程。 一、单万向联轴结机构的运动分析 图1是应用Solid Edge的Part模块制作的十字结、叉轴和支架。在支架的制作中要注意精确定位左右轴孔的位置及角度,以便准确安装。 图1 十字结、叉轴和支架的实体造型 图2为装配后的单万向联轴结,装配中左右叉轴与支架、十字结的定位关系均为轴对齐、面对齐。
图2 装配后的单万向联轴结 如果让右侧叉轴作为输入轴并以60r/min匀速旋转,左侧叉轴作为输出轴,由于其输出转速是变速的,在Solid Edge集成的Simply Motion模块中无法对该输出轴进行速度和加速度分析。应用Dynamic Designer/Motion for Solid Edge,在Edge Bar中选中左侧叉轴,单击鼠标右键,选“绘制曲线”→“角速度”→“幅值”,如图3所示;重复上述操作,在Edge Bar中选中左侧叉轴,单击鼠标右键,选“绘制曲线”→“角加速度”→“幅值”,图4为将会出现在操作区中的输出叉轴的角速度和角加速度曲线。 图3 绘制输出曲线的操作
平面连杆机构 一、填空: 1. 由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2 .铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件 称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与 连架杆相联接,传递运动和动力的构件称为连杆。 4. 铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)a+b≤c+d 。 (2)以__b或d__为机架,贝U __a__为曲柄。 图1-1 6. 在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。 7 .如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9. 机构中传动角丫和压力角α之和等于90°。 10. 通常压力角α是指力F与C点的绝对速度V C之间间所夹锐角
二、选择题: 1 ?在曲柄摇杆机构中,只有当C?摇杆为主动件时,才会出现“死点” 位 置。 A.连杆 B.机架 C.摇杆 D ?曲柄 2. 绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机 构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C.有时有曲柄,有时没曲柄 D.以上答案均不对 3. 当急回特性系数为 C. K > 1 时,曲柄摇杆机构才有急回运动。 A. K V1 B. K = 1 C. K > 1 D. K = 0 4. 当曲柄的极位夹角为 D. θ> 0 时,曲柄摇杆机构才有急回运动。 A. θ V 0 B. θ=O C. θ≤ 0 D. θ > 0 5. 当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。 A.按原运动方向 B.反方向 C. 不确定的 D. 以上答案均不对 6. 曲柄滑决机构是由 A.曲柄摇杆机构演化而来的。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D.以上 答案均不对 7. 平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之 和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C. 双摇杆机构 D.以上 答案均不对 8. 平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。
机构仿真是PROE的功能模块之一。PROE能做的仿真内容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。我再发一份学习笔记,并整理一下,当个基础教程吧。希望能对学习 仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动 的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺 省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体 的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。
大学普通高等教育 机械原理课程设计 题目题号:插床导杆机构位置3的设计 学院:机电工程学院 专业班级: 学生: 指导教师 成绩: 2013 年7月 2 日
目录 一、工作原理 二、设计要求 三、设计数据 四、设计容及工作量五. 设计计算过程 (一). 方案比较与选择 (二). 导杆机构分析与设计 1.机构的尺寸综合 2. 导杆机构的运动分析
一、工作原理: 插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄2转动,再通过导杆机构使装有刀具的滑块6沿导路y —y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H 中,前后各有一段0.05H 的空刀距离,工作阻力F 为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O 2上的凸轮驱动摆动从动件D O l 8和其它有关机构(图中未画出)来完成的。 二、设计要求: 电动机轴与曲柄轴2平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄2转速偏差为±5%。要求导杆机构的最小传动角不得小于60o ;凸轮机构的最大压力角应在许用值[α]之,摆动从动件8的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。
三、插床导杆机构设计数据 四、设计容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸, ()46.0~5.0BO BC l l =。要求用图解法设计,并将 设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架O 2O 4位于同一直线位置时,滑块6的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r o 、机架82O O l 和滚子半径r b ),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 6、按1:2绘制所设计的机构运动简图。
平面连杆机构优化设计 一、问题描述 平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。 设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π 32 ??ψψ-+ =。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。 图1 机构运动简图 二、基本思路
四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π 32 ??ψψ-+ =。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MATLAB 优化工具箱的相关函数进行求解。 三、要点分析 优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。 1.设计变量的确定 通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即 T 04321T 54321)()(?l l l l x x x x x ==X (1) 考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即 4 212 32 42210)(2)(cos arc l l l l l l l +-++=?(2)
平面连杆机构 一、填空: 1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。 4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)__a+b≤c+d_____。 (2)以__b或d__为机架,则__a__为曲柄。 图1-1 6.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。 7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9.机构中传动角γ和压力角α之和等于90°。 10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题: 1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位 置。 A.连杆 B.机架 C.摇杆 D.曲柄 2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对 3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。 A. K<1 B. K=1 C. K>1 D. K=0 4.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。 A.θ<0 B.θ=0 C. θ≦0 D. θ﹥0 5.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。 A.按原运动方向 B.反方向 C.不确定的 D. 以上答案均不对 6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。 A. 曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 7.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 8.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对
课程设计任务书
目录 1 绪论 (1) 1.1CATIA V5软件介绍 (1) 1.2ADAMS软件介绍 (1) 1.3S IM D ESIGNER软件介绍 (2) 1.4本次课程设计的主要内容及目的 (2) 2 曲柄连杆机构的建模 (3) 2.1活塞的建模 (3) 2.2活塞销的建模 (5) 2.3连杆的建模 (5) 2.4曲轴的建模 (6) 2.5汽缸体的建模 (8) 3 曲柄连杆机构的装配 (10) 3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10) 4 曲柄连杆机构导入ADAMS (14) 4.1曲柄连杆机构各个零部件之间运动副分析 (14) 4.2曲柄连杆机构各个零部件之间运动副建立 (14) 4.3曲柄连杆机构导入ADAMS (16) 5 曲柄连杆机构的运动学分析 (17) 结束语 (21) 参考文献 (22)
1 绪论 1.1 CATIA V5软件介绍 CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。 由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。 CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。 1.2 ADAMS软件介绍 ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、
平面连杆机构 一、复习思考题 1、什么是连杆机构?连杆机构有什么优缺点? 2、什么是曲柄?什么是摇杆?铰链四杆机构曲柄存在条件是什么? 3、铰链四杆机构有哪几种基本形式? 4、什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响? 5、什么叫行程速比系数?如何判断机构有否急回运动? 6、平面连杆机构和铰链四杆机构有什么不同? 7、双曲柄机构是怎样形成的? 8、双摇杆机构是怎样形成的? 9、述说曲柄滑块机构的演化与由来。 10、导杆机构是怎样演化来的? 11、曲柄滑块机构中,滑块的移动距离根据什么计算? 12、写出曲柄摇杆机构中,摇杆急回特性系数的计算式? 13、曲柄摇杆机构中,摇杆为什么会产生急回运动? 14、已知急回特性系数,如何求得曲柄的极位夹角? 15、平面连杆机构中,哪些机构在什么情况下才能出现急回运动? 16、平面连杆机构中,哪些机构在什么情况下出现“死点”位置? 17、曲柄摇杆机构有什么运动特点? 18、试述克服平面连杆机构“死点”位置的方法。 19、在什么情况下曲柄滑块机构才会有急回运动? 20、曲柄滑块机构都有什么特点? 21、试述摆动导杆机构的运动特点? 22、试述转动导杆机构的运动特点。 23、曲柄滑块机构与导杆机构,在构成上有何异同? 二、填空题 1、平面连杆机构是由一些刚性构件用副和副相互联接而组成的机构。 2、平面连杆机构能实现一些较复杂的运动。 3、当平面四杆机构中的运动副都是副时,就称之为铰链四杆机构;它是其他多杆机构的。
4、在铰链四杆机构中,能绕机架上的铰链作整周的叫曲柄。 5、在铰链四杆机构中,能绕机架上的铰链作的叫摇杆。 6、平面四杆机构的两个连架杆,可以有一个是,另一个是,也可以两个都是或都是。 7、平面四杆机构有三种基本形式,即机构,机构和机构。 8、组成曲柄摇杆机构的条件是:最短杆与最长杆的长度之和或其他两杆的长度之和;最短杆的相邻构件为,则最短杆为。 9、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。 10、在机构中,如果将杆对面的杆作为机架时,则与此相连的两杆均为摇杆,即是双摇杆机构。 11、在机构中,最短杆与最长杆的长度之和其余两杆的长度之和时,则不论取哪个杆作为,都可以组成双摇杆机构。 12、曲柄滑块机构是由曲柄摇杆机构的长度趋向而演变来的。 13、导杆机构可看做是由改变曲柄滑块机构中的而演变来的。 14、将曲柄滑块机构的改作固定机架时,可以得到导杆机构。 15、曲柄摇杆机构产生“死点”位置的条件是:摇杆为件,曲柄为件或者是把运动转换成运动。 16、曲柄摇杆机构出现急回运动特性的条件是:摇杆为件,曲柄为件或者是把` 运动转换成。 17、曲柄摇杆机构的不等于00,则急回特性系数就,机构就具有急回特性。 18、实际中的各种形式的四杆机构,都可看成是由改变某些构件的,或选择不同构件作为等方法所得到的铰链四杆机构的演化形式。 19、若以曲柄滑块机构的曲柄为主动件时,可以把曲柄的运动转换成滑块的运动。 20、若以曲柄滑块机构的滑块为主动件时,在运动过程中有“死点”位置。 21、通常利用机构中构件运动时的惯性,或依靠增设在曲柄上的惯性来渡过“死点”位置。 22、连杆机构的“死点”位置,将使机构在传动中出现或发生运动方向等现象。 23、飞轮的作用是可以,使运转。 24、在实际生产中,常常利用急回运动这个特性,来缩短时间,从而提高。
第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题:
23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。
机械原理课程设计 任务书 题目:连杆机构设计B4 姓名:戴新吉 班级:机械设计制造及其自动化2011级3班 设计参数 设计要求: 1.用解析法按计算间隔进行设计计算; 2.绘制3号图纸1张,包括: (1)机构运动简图; (2)期望函数与机构实现函数在计算点处的对比表; (3)根据对比表绘制期望函数与机构实现函数的位移对比图; 3.设计说明书一份; 4.要求设计步骤清楚,计算准确。说明书规范。作图要符合国家标。按时独 立完成任务。 目录
第1节平面四杆机构设计连杆机构设计的基本问题
连杆机构设计的基本问题是根据给定的要求选定机构的型式,确定各构件的尺寸,同时还要满足结构条件(如要求存在曲柄、杆长比恰当等)、动力条件(如适当的传动角等)和运动连续条件等。 根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三类问题: (1)预定的连杆位置要求; (2)满足预定的运动规律要求; (3)满足预定的轨迹要求; 连杆设计的方法有:解析法、作图法和实验法。 作图法设计四杆机构 对于四杆机构来说,当其铰链中心位置确定后,各杆的长度也就确定了。用作图法进行设计,就是利用各铰链之间相对运动 的几何关系,通过作图确定各铰链的位置,从而定出各杆的长度。 作图法设计四杆机构的特点 图解法的特点是直观、简单、快捷,对三个设计位置以下的设计是十分方便的,其设计精度也能满足工作的要求,并能为解析法精确求解和优化设计提供初始值。 根据设计要求的不同分为四种情况: (1) 按连杆预定的位置设计四杆机构; (2) 按两连架杆预定的对应角位移设计四杆机构; (3) 按预定的轨迹设计四杆机构; (4) 按给定的急回要求设计四杆机构。
平面连杆机构的优化设计 【教学目标】 1.了解连杆机构优化设计的一般步骤 2.掌握连杆机构优化设计的方法 【教学重点】 1.掌握连杆机构优化设计的方法 【教学难点】 1.掌握连杆机构优化设计的方法 【教学准备】 多媒体课件、直尺、圆规。 【教学过程】 一、以工程实际案例引入课题 实例1:飞机起落架(结合最近美国波音飞机频繁失事的新闻) 实例2:汽车雨刮器 说明:平面连杆机构的实用在生产生活中随处可见,是机械设计当中常见的一种机构。 二、定义回顾 【提问】平面四杆机构的基本形式有哪些? 【预设】机械原理是本科第四学期的课程,学生可能记不全,要引导性地带大家回忆。 【答案】曲柄摇杆机构、双曲柄机构、双摇杆机构 三、回顾以前所学习的连杆机构设计方法,对比引入优化设计。 新课教授 一、曲柄摇杆机构再现已知运动规律的优化设计
1.设计变量的确定 决定机构尺寸的各杆长度,以及当摇杆按已知运动规律开始运动时,曲柄所处的位置角φ0 为设计变量。 [][] 1234512340T T x x x x x x l l l l ?== 考虑到机构的杆长按比例变化时,不会改变其运动规律,因此在计算时常l 1=1 , 而其他杆长按比例取为l 1 的倍数。 ()()22212430124arccos 2l l l l l l l ???++-=??+???? ()221243034arccos 2l l l l l l ψ??+--=?????? 经分析后,只有三个变量为独立的: [][] 123234T T x x x x l l l == 2.目标函数的建立 目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即
2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。
9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( )
一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两
平面连杆机构习题及 答案
平面连杆机构 一、填空: 1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。 4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短 杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)__a+b≤c+d_____。 (2)以__b或d__为机架,则__a__为曲柄。 图1-1 6.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得曲柄摇杆机构。 7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9.机构中传动角γ和压力角α之和等于90°。 10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题: 1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位 置。 A.连杆 B.机架 C.摇杆 D.曲柄 2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对 3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。 A. K<1 B. K=1 C. K>1 D. K=0 4.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。 A.θ<0 B.θ=0 C. θ≦0 D. θ﹥0 5.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。 A.按原运动方向 B.反方向 C.不确定的 D. 以上答案均不对 6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。 A. 曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 7.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 8.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对
常用机构的运动仿真 一名资深机构设计师的话: 机构设计是机械设计中的灵魂,一种独特、新颖的机构设计体现了设计者的智慧与创新的精神。谁掌握、了解的机构越多,在研发设计新产品时就越主动,越有办法。 但是,熟练的掌握各种机构的设计并非易事,并非一日之功。它又是一种“隐性知识”,不是刚刚毕业就可以掌握的知识。需要日积月累,不断从实践、生活中学习,结合理论不断的总结,才能逐步地掌握。 但对于那些刚刚从事机械设计的人,才走上机械设计岗位的人,是否有一条稍微快捷的办法呢?我想尝试下面所述的方法:利用三维软件的运动仿真技术,把在实践中用到的、见到的以及在书本上学到的,常用的机构,绘制成三维模型仿真运动,让那些枯燥的平面图形变成实物一样的机构模型,并让他“动”起来,像看动画片一样。轻松地、在较短的时间里了解各种机构的运动原理,并大大地加深印象和记忆,用这样的办法来“缩短”掌握机构的时间。在老师的帮助下,首先完成了下面几个常用机构的仿真运动并作了简单的说明,方法是否可行?等候读者的消息。
20个常用机构的运动仿真案例 1、风扇摇头机构 图1是风扇摇头机构的原理模型。该机构把电机的转动转变成扇叶的摆动。红色的曲柄与蜗轮固接,蓝色杆为机架,绿色的连架杆与蜗杆(电机轴)固接。电机带扇叶转动,蜗杆驱动蜗轮旋转,蜗轮带动曲柄作平面运动,而完成风扇的摇头(摆动)运动。机构中使用了蜗轮蜗杆传动,目的是降低扇叶的摆动速度、模拟自然风。 图 1 风扇摇头机构 2、用摆动扇形齿轮实现间接送料机构 图2 是一个曲柄摇杆机构。绿色的可调曲柄可作整周旋转。并驱动扇形齿轮(摇杆)摆动,扇形齿轮又使蓝色小齿轮正反转动,若小齿轮与电磁离合器或超越离合器结合可完成间歇转动,可完成间断送料。 图 2 摆动扇形齿轮机构
平面连杆机构习题及解答 一、复习思考题 1、什么是连杆机构?连杆机构有什么优缺点? 2、什么是曲柄?什么是摇杆?铰链四杆机构曲柄存在条件是什么? 3、铰链四杆机构有哪几种基本形式? 4、什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响? 5、什么叫行程速比系数?如何判断机构有否急回运动? 6、平面连杆机构和铰链四杆机构有什么不同? 18、试述克服平面连杆机构“死点”位置的方法。 二、填空题 1、平面连杆机构是由一些刚性构件用副和副相互联接而组成的机构。 2、平面连杆机构能实现一些较复杂的运动。 3、当平面四杆机构中的运动副都是副时,就称之为铰链四杆机构;它是其他多杆机构的。 4、在铰链四杆机构中,能绕机架上的铰链作整周的叫曲柄。 5、在铰链四杆机构中,能绕机架上的铰链作的叫摇杆。 6、平面四杆机构的两个连架杆,可以有一个是,另一个是,也可以两个都是或都是。 7、平面四杆机构有三种基本形式,即机构,机构和机构。 8、组成曲柄摇杆机构的条件是:最短杆与最长杆的长度之和或其他两杆的长度之和;最短杆的相邻构件为,则最短杆为。 9、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。 10、在机构中,如果将杆对面的杆作为机架时,则与此相连的两杆均为摇杆,即是双摇杆机构。 11、在机构中,最短杆与最长杆的长度之和其余两杆的长度之和时,则不论取哪个杆作为,都可以组成双摇杆机构。 12、曲柄滑块机构是由曲柄摇杆机构的长度趋向而演变来的。 13、导杆机构可看做是由改变曲柄滑块机构中的而演变来的。 14、将曲柄滑块机构的改作固定机架时,可以得到导杆机构。