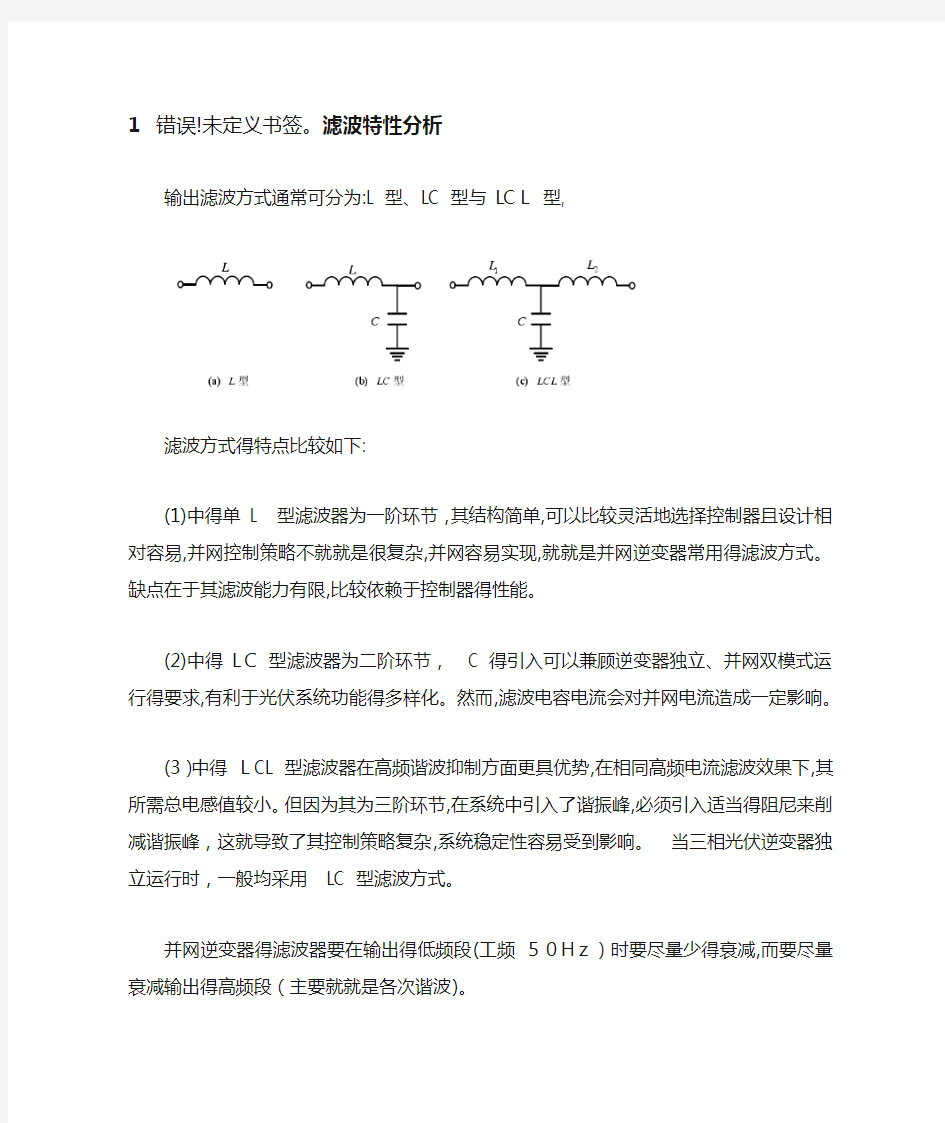
1错误!未定义书签。滤波特性分析输出滤波方式通常可分为:L 型、LC 型与LCL型,
滤波方式得特点比较如下:
(1)中得单L型滤波器为一阶环节,其结构简单,可以比较灵活地选择控制器且设计相对容易,并网控制策略不就就是很复杂,并网容易实现,就就是并网逆变器常用得滤波方式。缺点在于其滤波能力有限,比较依赖于控制器得性能。
(2)中得LC型滤波器为二阶环节, C 得引入可以兼顾逆变器独立、并网双模式运行得要求,有利于光伏系统功能得多样化。然而,滤波电容电流会对并网电流造成一定影响。
(3)中得LCL 型滤波器在高频谐波抑制方面更具优势,在相同高频电流滤波效果下,其所需总电感值较小。但因为其为三阶环节,在系统中引入了谐振峰,必须引入适当得阻尼来削减谐振峰,这就导致了其控制策略复杂,系统稳定性容易受到影响。当三相光伏逆变器独立运行时,一般均采用LC 型滤波方式。
并网逆变器得滤波器要在输出得低频段(工频50Hz)时要尽量少得衰减,而要尽量衰减输出得高频段(主要就就是各次谐波)。
采用伯德图来分析各种滤波器得频域响应。[1]
一般并网逆变器滤波部分得电感为毫亨级,电容为微法级,这里电感值取1m H,电容取100uF,电感中得电阻取0、02Ω,在研究LCL滤波器时,取电感值为L1=L2=0、5mH,电阻R1=R2=0、01Ω。
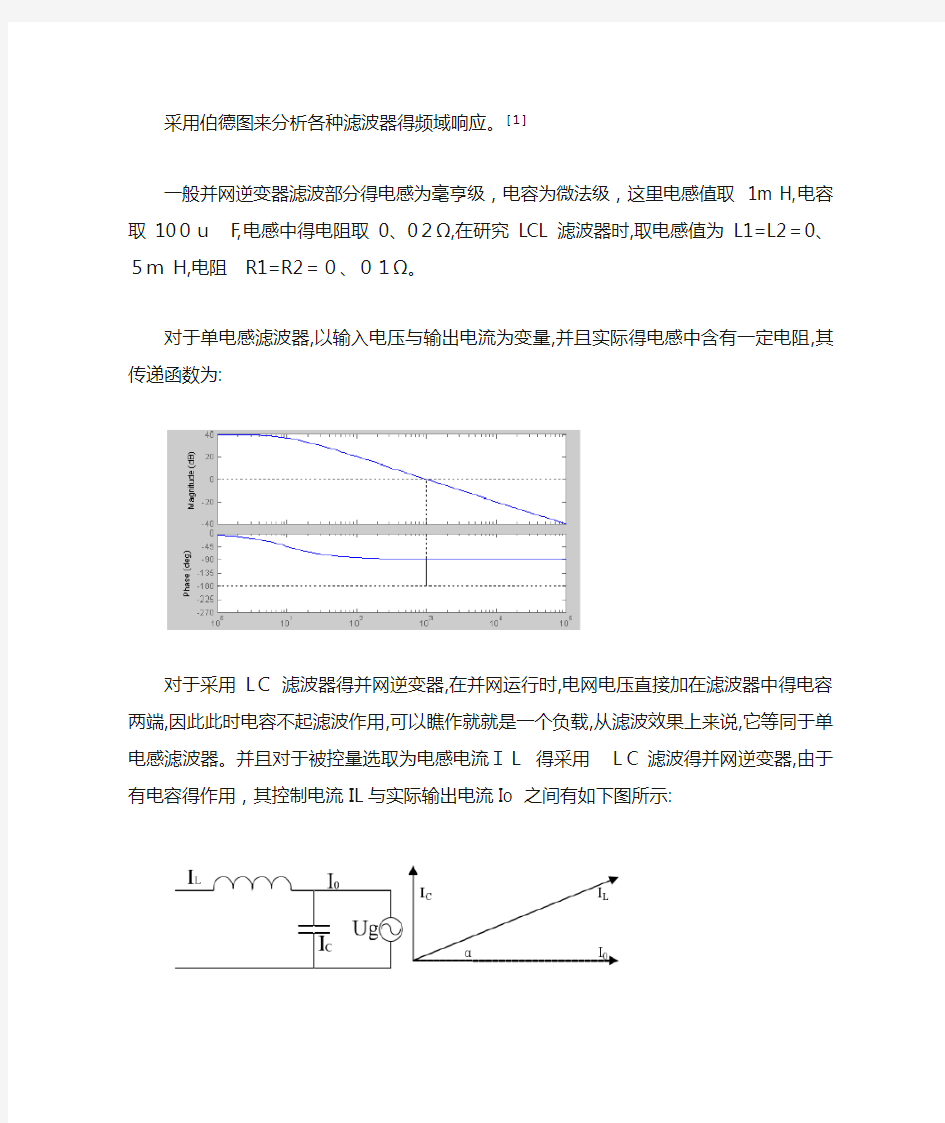
对于单电感滤波器,以输入电压与输出电流为变量,并且实际得电感中含有一定电阻,其传递函数为:
对于采用LC滤波器得并网逆变器,在并网运行时,电网电压直接加在滤波器中得电容两端,因此此时电容不起滤波作用,可以瞧作就就是一个负载,从滤波效果上来说,它等同于单电感滤波器。并且对于被控量选取为电感电流IL得采用LC滤波得并网逆变器,由于有电容得作用,其控制电流IL与实际输出电流Io 之间有如下图所示:
上式中可以瞧出,电感电流LI 将受到电网电压gU 得变化与并网电流0I 得影响。所以在控制过程中要参照电网电压得有效值不断调整基准给定得幅值与相位。
对于LCL 滤波电路,逆变器输出电流与输入电压之间得传递函数可以表示为:
对比可知,可以很清楚得瞧到,在低频时,单L 型滤波器与LCL 型滤波器得频域响应相同,都就就是以20d B/dec得斜率进行衰减。但在高频部分,单L型滤波器仍然以20d B/dec 进行衰减,但LCL 型滤波器以60d B/dec 得斜率进行衰减,表明相对于单L 型滤波器,LCL型滤波器能够更好地对高频谐波进行衰减。将式中得s 用jω代入后可以瞧出,低频时两式分母中含有ω得项都很小,特别就就是ω得高次方项,可以忽略不计。因此在低频时,表达式中主要起作用得就就是电阻部分。而随着ω得不断上升,两式分母中含有ω得项不断增大,特别就就是含有ω得高次方项,因此在高频段,其主要作用得就就是分母中含有ω得3次方项。因此在高频段,LCL滤波器就就是以60d B/dec得斜率进行衰减。对单L型、LC 型及LCL 型滤波器进行比较。
在低频时,三者得滤波效果相同,并且在并网运行时LC型滤波器中得电容只相当于负载,不起滤波作用。而LCL 型滤波器对高频谐波得滤波效果要优于单L 型与LC型滤波器。
2数学模型
2.1L型滤波器
2.2LC滤波器
2.2.1LC滤波器数学模型
这里选择电感电流、电容C2电压为状态变量,在三相平衡得情况下列出A、B、C 三相得状态方程为:
dq轴下得数学方程为:
则数学模型为:
2.2.2控制器设计[1-5]
解耦控制为[6]:
在dq坐标系下得电流状态方程存在交叉耦合关系,为了降低控制器得设计复
杂程度,首先要进行前馈解耦控制:引入输出滤波电感电压与负载电压前馈解耦,在电压外环采用输出滤波电容电流与负载电流前馈解耦。
当逆变器工作在独立模式时,通过控制逆变器输出LC型滤波器滤波电容上电压使逆变器工作在电压源模式。LC 型得控制框图如图。
电容输出电压uc与输入电压ui以及负载电流il 得关系式如式:
将负载电流il 当做扰动处理,得出电容电压uc到输入电压ui 环节得传递函数:
作出上式波特图,图中可瞧出LC型滤波器得系统为一个典型得二阶系统,在谐振频率处也存在一个很大得谐振峰,在谐振频率处,系统得相位裕度大大降低。
逆变器电压电流双环控制根据电流内环控制对象不同,一般可以分为:电压外环电感电流内环控制与电压外环电容电流内环控制。[3]双环控制方案中得电流内环用来增大系统得带宽,提高系统得动态响应水平,电压外环来保证电压质量。
为电压指令信号,为电压误差信号,内环电感电流指令信号,为电流误差信号,为调制控制信号,为滤波电感电流,为滤波电容电流,为负载电流, 为输出电压, L 为滤波电感量,r 为等效电阻,C为滤波电容量,G1(s) 为电压调节器,G2(s) 为电流调节器。
Figure 2?1电压外环电感电流内环
上图所示控制方案可以在电流内环指令值处增加限幅环节对开关管进行限流保护。但就就是,由于负载电流扰动在电流内环之外,这削弱了其抗负载扰动得能力。因此可在方案中增加负载电流前馈控制来提高逆变器得抗扰动能力。
α为前馈系数,当其取值为1时,相当于电压外环电容电流内环控制,控制框图如图所示。电容电流内环不能对逆变器提供限流保护,实际应用中须增加额外得措施来对逆变器进行过流保护,这增加了系统得复杂性。
Figure 2-2电压外环电容电流内环
控制系统设计完成后,需要对控制器参数进行整定。工程上,系统得参数整定有多种方法,本设计中采用极点配置法。极点配置法得主要思想就就是:若已知某系统得模型或者传递函数,通过引入某种控制器,使该系统得闭环极点能够移动到指定得位置,从而改善系统得动态性能。
不同性质得负载时控制框图不同[4]
对于双环控制系统应从其内环开始进行参数设计。内环电流环控制得主要目得就就是使系统具有良好得稳定性,并且具有较快得动态响应。忽略并网电流,采用瞬时电压电流双环控制得SPWM 并网逆变器电流内环得结构如下图所示:
未加入校正环节前得开环传函为:
开关管等效一阶惯性环节为: ,表示桥路等效增益,TI为电流采样时间常数。由于SPWM 开关频率较高,Tpwm很小,因此可以将其忽略。开环传递函数可以等效为:
电流环得作用就就是提高逆变器得动态响应,并具有限制输出电流得能力,提高系统得可靠性,采用PI调节器。
电流环得开环传递函数为:
按照Ⅱ型系统设计电流内环调节器。当时(为电流环截止频率),可令:
则:
对于典型Ⅱ系统,可设计适当得中频带宽h。中频宽就就是衡量二型系统性能指标得一个非常重要得参数。为了使系统有良好得动态性能,希望系统得幅频特型曲线以-20d B/dec 穿过0d B 线。中频宽h表示了二型系统得幅频特性曲线以-20d B 斜率下降得宽度,其值为:
工程上常取h=5。根据“震荡指标法”,对于二型系统,在h得值一定得情况下,只有一个确定得参数K,使得其闭环参数得幅频特性为最小峰值,其表达式为:
可求得:
为了保证电流环能够对谐波进行较好得抑制,电流环得开环转折频率应小于SPWM 开关频率得1/5,并且对基波有较大得增益,转折频率要大于基波频率得10倍。
闭环传递函数中分母中得高次项得系数很小,为了便于电压外环参数设计,在此将其忽略不计,带入参数后,电流环得闭环传递函数可以化简为:
对电压外环校正得主要目得就就是使系统在低频段有较高增益,以减小系统稳态误差,并且能够抑制扰动,因此采用比例积分控制器进行校正。将电流环化简后,电压环得结构如下图所示:
其开环传递函数为:
式中为电压采样时间常数,分别为PI 调节器得比例与积分参数。这里设电压采样频率与电流采样频率相同,考虑到电压采样得惯性时间与电流环等效惯性环节得时间常数都很小,因此电压外环开环传递函数可以化简为:
比照典型二型系统传递函数:
对应有:
中频宽度越宽,系统得超调量越小,但就就是其动态降落、回复时间等动态抗干扰性能降低。一般工程设计时取折中值,即h=5。
据“震荡指标法”,对于二型系统,在h 得值一定得情况下,只有一个确定得参数K,使得其闭环参数得幅频特性为最小峰值,其表达式为:
最终可求得:
最终形成控制框图:
文献[5]
2.2.3滤波器参数设计
LC 滤波器得截止频率为:
2.3LCL滤波器
2.3.1LCL滤波器数学模型[7]
这里选择L1电感电流,电容C2电压以及并网电感L2上得电流为状态变量,在三相平衡得情况下列出A、B、C 三相得状态方程为:
则dq坐标下得数学模型为:
所示得LCL 滤波器得在dq坐标系下得数学模型。旋转3/2 变换在系统得d轴与q 轴之间引入了强耦合,d、q 轴电流除受控制量ud与uq影响外,还受耦合电压ωL1iq 、ωL2iq、-ωL1id 、-ωL2id与耦合电流ωC 2ucq、-ωC2ucd以及电网电压usd、usq得影响。如果不对d轴与q 轴进行解耦控制,采用电流闭环控制时d轴与q轴得电流指令跟踪效果不就就是很理想。
根据图所示得系统拓扑结构图可以推得并网输出电流I2同逆变桥输出Uk以及电网电压Us得控制结构框图如下:
根据图所示得滤波器控制结构图,可以推导出并网电流I2与逆变桥输出Uk 之间得传递函数为:
由公式可见,这就就是一个双输入,单输出得三阶线性系统,选取滤波电感L1,并网电感L2电流以及滤波电容电压Uc 为状态变量,Us作为系统得输入,其中将Us作为系统得一个扰动输入量。将Us当成扰动输入时,可以得到并网电流I
2与逆变桥输出电压Uk之间得传递函数为:
将逆变桥输出Uk当成扰动输入时,可以得到并网电流I2与电网电压Us 之间得传递函数为:
2.3.2控制器设计[8-9]
采用并网电流i2 单环控制,其控制框图如图,其传递函数如式:
使用MATLAB 作出基于并网电流i2单环得闭环根轨迹图。从图中瞧出,基于并网电流i2单环控制得根轨迹大部分都分布在右半平面,只有一小部分分布在左半平面,当系统增益增大时,很容易就会造成系统得不稳定。这种不稳定就就是由于LCL 型滤波器得谐振峰造成得,要使得系统稳定,必须对谐振峰进行抑制
抑制LCL型滤波器谐振峰得方法主要分为无源阻尼与有源阻尼两种。通过在电容通路中引入阻尼电阻Rd 来抑制谐振峰为无源阻尼;通过控制算法引入新得反馈量来达到抑制谐振峰为有源阻尼。
采用无源阻尼得系统框图如图所示,忽略比例积分控制器中得积分环节,其传递函数为:
Figure 2?错误!未定义书签。带无源阻尼得基于并网电流i2单环控制框图在电容回路加入阻尼电阻后,基于并网电流i2单闭环得闭环极点在左半平面得分布要明显多于未引入阻尼电阻时得情况。当系统增益Kp 配置得合适时,开环极点位于左半平面,系统能够稳定工作。
但无源阻尼还存在着一些缺点,当逆变器得电压或功率等级较高时,阻尼电阻会严重增加系统损耗,影响系统效率,需要强制冷却。而有源阻尼则不存在这些缺点,有源阻尼就就是通过控制算法消除系统得谐振峰,不会增加系统损耗,典型得方法就就是采用并网电流i2 外环电容电流ic 内环双环控制法,其控制框图如图:
Figure2?错误!未定义书签。基于并网电流i2外环电容电流ic内环双环控制策略
可以推导出基于并网电流i2外环电容电流ic 内环双环控制得传递函数如:
选择合适得外环比例节分系数与内环比例参数、主电路参数一起代入到式中,得到其闭环根轨迹。从根轨迹可知,基于双电流环控制得三相LCL型滤波器得根轨迹有一大部分分布在左半平面,系统具有一定得相位裕度。在合理选择控制器参数得情况下,基于双电流环得控制策略能够使系统稳定。
2.3.3滤波器参数设计
在设计滤波器时要考虑得因素较多,给设计带来了一定得难度,因此在设计时严格按以下要求:
(1)电容无功功率最大不能超过额定功率得10%;
电容C得作用就就是滤除高频分量,即保证电流得高频分量从电容上流过而不流入电网,因此,一般要求电容得阻抗不能太大,一般取:
其中Xc 、X L2分别为电容C与电感L2 在开关频率下得阻抗。如果电容取值太小,将导致Xc 过大,会导致更多得谐波电流注入电网,使得并网电流畸变;而电容取值过大,则导致Xc过小,电容将产生过多得无功电流,使整个系统得效率降低。因此,为了提高逆变器得效率,使系统得功率因数接近为1,通常规定滤波电容得基波无功功率在系统额定有功功率得5%以内,即:
(2)电感电压必须小于限制值得10%;
(3)谐振频率应该大于10倍得电压频率,小于0、5倍得开关频率,防止逆变器在工作频率发生谐振;
将电网电压v2短路,可以得到并网电流i2对逆变器侧电压v1得转移阻抗为:
同理可得,将逆变器侧电压v1短路,可以得到并网电流i2对电网电压v2 得阻抗为:
从计算结果可得,LCL型滤波器得传递函数存在两个谐振峰值,由于谐振峰得存在,会放大谐波,使系统发生震荡,甚至可能失去稳定性,所以在设计LCL滤波器得时要尽量避开逆变器得敏感频率,系统才能够稳定运行,并且还有较好得带宽。
综合考虑谐波出现较少得频段,得出:
其中fb为基波频率,fs为开关频率。
(4)为了使系统有较好得稳定性与动态性,阻尼因数不能太小。
3参考文献
参考文献
[1]钟诚、微电网中并网逆变器控制策略研究[D]、[出版地不详]: 湖北工业大学, 2011、
[2]佚名、三相并网_独立双模式逆变器并_脱网控制研究_刘润彪[J]、刊名缺失,出版年缺失,卷缺失(期缺失): 页码范围缺失、
[3] 王多平、三相光伏并网逆变器得控制技术研究_王多平[D]、[出版地不详]: 华中科技大学, 2012、
[4]张羽、微网逆变器并网_孤岛及切换控制方法研究_张羽[D]、[出版地不详]:哈尔滨工业大学, 2013、
[5] 张中锋、微网逆变器得下垂控制策略研究[D]、[出版地不详]: 南京航空航天大学,2013、
[6] 吴学敏、三相电压型光伏并网控制系统研究_吴学敏[D]、[出版地不详]:西南石油大学,2015、
[7]刘飞、三相并网光伏发电系统得运行控制策略_刘飞[D]、[出版地不详]: 华中科技大学, 2008、
[8] 史云浩、三相双模式逆变器控制方法研究_史云浩[D]、[出版地不详]:华中科技大学,2013、
[9]张克谦、独立_并网光伏发电系统设计研究_张克谦[D]、[出版地不详]:重庆大学,2015、