愤怒的仓鼠智能声控电风扇
第八部分研制报告
(一)系统设计方案
课题的研究内容
运用单片机可以设计出智能型的声控开关,电路设计好后,运用软件编程来实现其功能,灵活方便,修改简单,在使用过程中更加的安全节电,智能环保。
技术方案的选择
目前的声控开关大多都是应用模拟电子技术进行设计,分立元件多,不可靠,而且许多声控开关的平均使用寿命不长,主要是因为电路作频繁的开关,启动电流非常大,导致功率元件可控硅由于过载而损坏。如果在设计中采用开关电压过零保护技术,可消除白炽灯开启瞬间的大电流冲击,有效地防止可控硅元件启动时的电流过载,大大地延长了开关的使用寿命,并且可以起到保护灯泡的作用。
如今单片机技术已经相当成熟,未来的发展方向趋向于运用单片机可以设计出智能型的声控开关,电路设计好后,运用软件编程来实现其功能,灵活方便,修改简单。在使用过程中更加的安全节电,智能环保。
首先单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。
单片机的特点:
(1)种类多,型号全;
(2)提高性能,扩大容量,性能价格比高;
(3)增加控制功能,向真正意义上的“单片”机发展;
(4)低消耗;
(5)C语言开发环境,友好的人机互交环境。
单片机的优点:
(1)使用寿命长;
(2)运行速度越来越快;
(3)低噪声和高可靠性技术;
(4)OTP与掩膜。
综上所述,单片机的特点和优点符合制作智能声光控开关的条件,并且具有准确性和节能性。
(二)声控电路的设计
摘要
声控电路主要由捡音器(驻极体电容器话筒),晶体管放大器和发光二极管等构成。驻极体电容来采取声音信号,晶体管放大器将较弱的信号放大传输给发光二极管,发光二极管即LED 灯内芯,来产生发光效果。
本设计主要涉及模电部分音频放大电路:把音频放大产生脉冲传递给LED驱动控制电路。声控电路有很多种形式,本设计采取最基本,最实用的,性能可靠,安装调试方便等优点的声控LED电路。
关键词:采集放大驱动LED
1 设计任务与要求
进一步熟悉模拟和数字设计方法和规范,并进一步巩固所学模拟电子及相关知识,达到综合应用电子技术的目的,培养设计开发以及动手实践等能力,学会阅读相关科技文献,查找器件手册与相关参数,独立思考分析,完整理总结设计报告。了解声控电路的功能,学会在实际电路中应用。进一步熟悉放大电路、驱动电路的应用。了解驻极体电容传声器的种类不同,采用的测量电路和要求也不同。完成声控电路的连接和调试。学会对电子电路的检测和排除电路故障,进一步熟悉常用电子仪器的使用,提高分析问题和解决问题的能力。
1、声音由驻极体传声器拾取,使得LED灯发光
2、掌握驻极体电容传声器、放大电路、驱动电路的原理,给出声控电路总体方案。
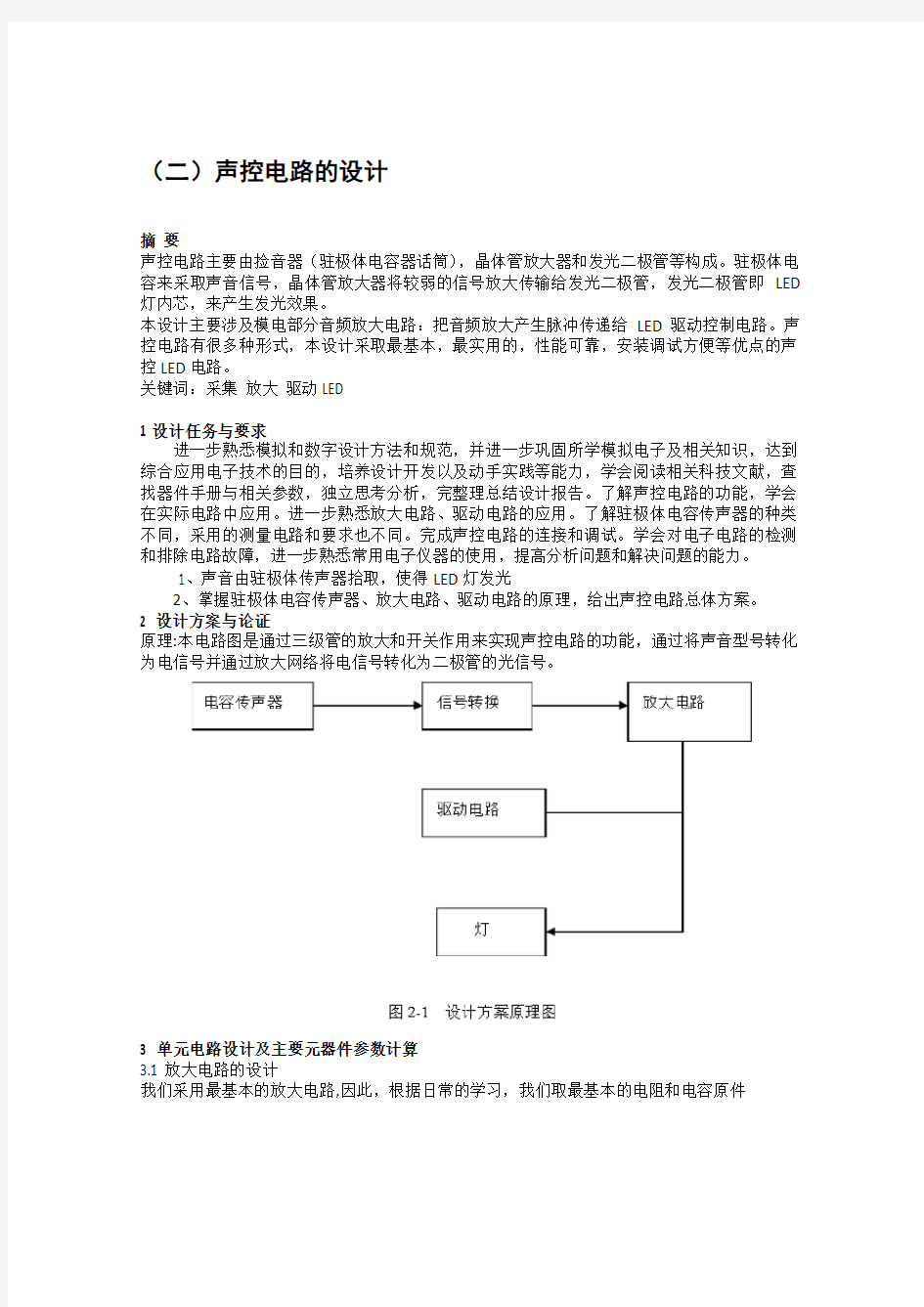
2 设计方案与论证
原理:本电路图是通过三级管的放大和开关作用来实现声控电路的功能,通过将声音型号转化为电信号并通过放大网络将电信号转化为二极管的光信号。
3 单元电路设计及主要元器件参数计算
3.1 放大电路的设计
我们采用最基本的放大电路,因此,根据日常的学习,我们取最基本的电阻和电容原件
图3-1 放大电路示意图
3.2 开关的实现
由三极管工作条件可知,只有当2VD基极有电流时,才能够实现发射极正偏,此时2VD起到了开关的作用,即只有当驻极体电容传声器产生电信号,通过1VD的放大作用传送到2VD时,2VD才起到开关的作用,此时发光二极管LED接通,开始发光。
图3-2 开关电路示意图
4 仿真与调试
4.1 电路图
图4-1 声控电路设计示意图
4.2 调试准备——检查电路
在通电调试之前,必须认真检查电路连线是否正确,对照电路图按照一定的顺序逐级检测,特别要注意电源是否接错,电源与地是否有短接,三极管是否接反,轻轻拨一拨元器件,观察焊点是否牢固。
4.3 调试
先用万用表测量电路有关点电位是否正常。发现不正常现象时,及时找出原因进行修改,注意接线不得有误,接入电源,是脉冲发生电路正常工作。观察灯泡是否按要求进行亮暗变化。如不能顺利完成以上功能,则应认真检查电路的连接及功能设计是否有误并作出相应的调整。故障分析
起初闭合开关,LED灯并不能正常发光,仔细分析后发现,是因为信号发生器幅值不够,幅值改变之后, LED正常发光。不断增加幅值大小,LED仍能够正常发光,说明声音强度越大,LED发光越好。
(三)声音控制开关
一、摘要
本课题主要设计一个声音控制开关,在智能板上安装一个MIC麦克风,当单片机接收到声音,控制继电器点亮LED灯,同时数码管显示OPEN LED,否则显示CLOSE。
在原有开发板的基础上,外加一个MIC麦克风放大电路,如图1-1所示,正极接单片机的任意引脚,负极接地。继电器控制电路的硬件连接如图2,STC12C5A60S2单片机的IO端口P3.7控制继电器的吸合-和释放,三极管用于增加线圈的吸合的释放的电流,二极管4148用于继电器线圈的反向保护,控制P3.7的“0”和“1”使“MID”与“CLOSE”通,或“MID”与“OPEN”通。当麦克风接收到声音后继电器得电,经过处理转换成脉冲电压送给单片机,控制继电器点亮LED灯。
二、本论
2、课程设计原理
在原有开发板的基础上,外加一个MIC麦克风放大电路,如图1-1所示,正极接单片机的任意引脚,负极接地。继电器控制电路的硬件连接如图2,
STC12C5A60S2单片机的IO端口P3.7控制继电器的吸合-和释放,三极管用于增加线圈的吸合的释放的电流,二极管4148用于继电器线圈的反向保护,控制P3.7的“0”和“1”使“MID”与“CLOSE”通,或“MID”与“OPEN”通。当麦克风接收到声音后继电器得电,经过处理转换成脉冲电压送给单片机,控制继电器点亮LED灯。
当有声音信号输入,则LED绿灯亮,数码管显示OPEN;没有输入时LED红灯亮,数码管显示CLOSE。
3、硬件原理图
1)MIC麦克风放大电路
图1-1
2)继电器控制电路
3)
数
码
管
显
示
电
路
LED数码管显示器硬件电路原理图如图
4、程序流程
定义引脚、说明变量
延时函数
中断0、中断1
取段码,送位码
主函数
方式寄存器置初值
起动定时器0、1
死循环
5、调试运行
1)将程序写入单片机中运行
2)上电后输入声音信号,数码管显示OPEN,LED绿灯亮
3)遇到的问题
a、起初数码管只能点动显示OPEN和CLOSED,在程序中加上if(in==0)
s++; if(s!=0)语句后,就可以延时显示了。
b、输入单片机两个引脚的电压过低,无法驱动继电器工作。加入一个上
拉电阻后,
电压增大,就可以驱动继电器工作了。
三、参考文献
1、继电器控制电路说明
(1)电器的工作原理和特性
继电器是一种电子控制器件,它具有控制系统(又称输入回路)和被控制系统(又称输出回路),通常应用于自动控制电路中,它实际上是用较小的电流去控制较大电流的一种“自动开关”。故在电路中起着自动调节、安全保护、转换电路等作用。
(2)电器主要产品技术参数
1)额定工作电压
是指继电器正常工作时线圈所需要的电压。根据继电器的型号不同,可以是
交流电压,也可以是直流电压。
2)直流电阻
是指继电器中线圈的直流电阻,可以通过万能表测量。
3)吸合电流
是指继电器能够产生吸合动作的最小电流。在正常使用时,给定的电流必须略大于吸合电流,这样继电器才能稳定地工作。而对于线圈所加的工作电压,一般不要超过额定工作电压的1.5倍,否则会产生较大的电流而把线圈烧毁。
4)释放电流
是指继电器产生释放动作的最大电流。当继电器吸合状态的电流减小到一定程度时,继电器就会恢复到未通电的释放状态。这时的电流远远小于吸合电流。
5)触点切换电压和电流
是指继电器允许加载的电压和电流。它决定了继电器能控制电压和电流的大小,使用时不能超过此值,否则很容易损坏继电器的触点。
四、附录
课题设计程序
#include
#define uint unsigned int
#define uchar unsigned char
sbit ser=P2^1; //LED显示 595数据输入
sbit srclk1=P2^2; //
sbit rclk1=P2^3; //
sbit in=P1^2; //
sbit out=P3^7; //
ucharcodeLED[ ]={0xc0,0x8c,0x86,0x89,0xc7,0xc86,0xc0,0xc6,0xc7,0xc0,0x
92,0x86,0xff};//共阳极段码表说明
uint idata j,k,m,n=0;//说明整数变量
uchar idata aa,bb[]={7,1,3,5,0,9,1,3,},cc;// 8个数码管显示的数数组
uint i,dd,s;
//-------------------------------------------------------------------- void delay(uint time)
{
uchar jj,hh;
while(--time!=0)
{
for(jj==0;jj<255;jj++)
{
for(hh==0;hh<255;hh++);
}
}
}
//-------------------------------------------------------------------- void time0() interrupt 1 using 2
{
TF0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
if(in==0)
s++;
if(s!=0)
{
bb[4]=12;
bb[5]=0;
bb[6]=1;
bb[7]=2;
bb[0]=3;
bb[1]=4;
bb[2]=5;
bb[3]=6;
out=1;
s++;
}
if(s==100)
s=0;
if(in==1&&s==0)
{ bb[4]=12;
bb[5]=12;
bb[6]=12;
bb[7]=7;
bb[0]=8;
bb[1]=9;
bb[2]=10;
bb[3]=11;
out=0;
}
}
void time1() interrupt 3 using 2
{
cc= LED[bb[n]]; //取段码
dd=aa;
TH1=(65536-1000)/256;
TL1=(65536-1000)%256;
for(j=0;j<8;j++) //位码移位串行输出
{ if(dd&0x80) ser=1; else ser=0;
dd=dd<<1;
srclk1=0;
srclk1=1;
}
dd=cc;
for(j=0;j<8;j++) //段码移位串行输出
{ if(dd&0x80) ser=1; else ser=0;
dd=dd<<1;
srclk1=0;
srclk1=1;
}
n++; //显示位计数
if(n>=8) //如果显示了8个位码初始
{
aa=0x7f; //位码初始值11111110其中0为显示 1为不显示
n=0; //初始变量i
}
else aa=(aa>>1)|0x80; //不是8位码左移一位
rclk1=0; //595锁存脉冲
rclk1=1;
}
main()
{ TMOD=0x11;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TH1=(65536-1000)/256;
TL1=(65536-1000)%256;
IE=0x8a;
TR0=1;
TR1=1;
while(1)
{
}}
(四)声控开关设计 设计过程 一、 方案设计
1. 方案概述
方案说明:此方案采用集成运放放点电路,555构成的单稳态触发器和多谐振荡器以及施密特触发器。驻极体话筒接收到一定强度的声音信号后,声音信号转换为电压信号,幅度很小,经放大、整形后,触发单稳态延时电路,产生一个宽度可调的脉冲信号,驱动发光二极管显示。
图1 声控开关原理框图
从以上方案中可知,方案设有信号发生电路,放大整形电路,单稳延时,实基电路,计数器以及译码显示。各部分功能明确且之间的联系容易理解,所以采用这种方案。
2 实验器材:
主要器件:(1)、555定时器;
(2)、UA741集成放大块;
(3)、电源+6V 、+5V 直流电源;
(4)、电容皮法、纳法级别电容若干; (5)、电阻及电阻器若干;
驻极体话筒
放大 电路 整形 电路
单稳延时
3 电路设计:
1、放大整形电路
因为集成运放起着放大的作用,所以它的输出信号应为输入信号的101倍。放大倍数计算: Au=1+R2/R4=1+100k/1k=101。电阻参数设计,由放大倍数可设 R2为100k欧姆,R4为1k欧姆。则其中电阻R1的计算公式为:R1=R2//R4= R4*R2/(R2+R4)=100k*1k/(100k+1k)=1k其中R1可以选择为1k,这样就可与反向端电阻起到平衡的作用。用555定时器构成的施密特触发器起整形作用。如图2电路所示。
图2 放大整形电路原理框图
2、整形电路
用555定时器组成施密特触发器
(1)当ui=0时,由于比较器C1=1、C2=0,触发器置1,即Q=1、,uo1=uo=1。ui升高时,在未到达2VCC/3以前,uo1=uo=1的状态不会改变。
(1)当ui=0时,由于比较器C1=1、C2=0,触发器置1,即Q=1、,uo1=
uo=1。ui升高时,在未到达2VCC/3以前,uo1=uo=1的状态不会改变。
(2)ui升高到2VCC/3时,比较器C1输出为0、C2输出为1,触发器置0,即Q
=0、,uo1=uo=0。此后,ui上升到VCC,然后再降低,但在未到达VCC/3以
前,uo1=uo=0的状态不会改变。
(1)当ui=0时,由于比较器C1=1、C2=0,触发器置1,即Q=1、,uo1=uo=1。ui升高时,在未到达2VCC/3以前,uo1=uo=1的状态不会改变。
(2)ui升高到2VCC/3时,比较器C1输出为0、C2输出为1,触发器置0,即Q=0、,uo1=uo=0。此后,ui上升到VCC,然后再降低,但在未到达VC C/3以前,uo1=uo=0的状态不会改变。
(3)ui下降到2VCC/3时,比较器C1输出为1、C2输出为0,触发器置1,即Q=1、,uo1=uo=1。此后,ui继续下降到0,但uo1=uo=1的状态不会
改变。
3、单稳延时电路
用555定时器构成的单稳态触发器起单稳延时作用,高电平触发,其中tw=1.1RC。时间是0—10s可调,C取100uF,可计算出R为0—900千欧的电位器。
如图3电路所示。
图3 单稳延时电路原理框图
单稳态触发器的工作原理:单稳态触发器的特点是电路有一个稳定状态和一个暂稳状态。在触发信号作用下,电路将由稳态翻转到暂稳态,暂稳态是一个不能长久保持的状态,由于电路中RC延时环节的作用,经过一段时间后,电路会自动返回到稳态,并在输出端获得一个脉冲宽度为tw的矩形波。在单稳态触发器中,输出的脉冲宽度tw,就是暂稳态的维持时间,其长短取决于电路的参数值。
由555构成的单稳态触发器电路及工作波形如图1所示。图中R,C为外接定时元件,输人的触发信号ui接在低电平触发端(2脚)。
稳态时,输出uo为低电平,即无触发器信号(ui为高电平)时,电路处于稳定状态——输出低电平。在ui负脉冲作用下,低电平触发端得到低于(1/3)Vcc,触发信号,输出uo为高电平,放电管VT截止,电路进入暂稳态,定时开始。
在暂稳态期间,电源+Vcc→R→C→地,对电容充电,充电时间常数T=RC,uc按指数规律上升。当电容两端电压uc上升到(2/3)Vcc后,6端为高电平,输出uo变为低电平,放电管VT导通,定时电容C充电结束,即暂稳态结束。电路恢复到稳态uo为低电平的状态。当第二个触发脉冲到来时,又重复上述过程。工作波形图如图1(b)所示。
可见,输人一个负脉冲,就可以得到一个宽度一定的正脉冲输出,其脉冲宽度tw取决于电容器由0充电到(2/3)Vcc,所需要的时间。可得
Tw=RCln[(Vcc-0)/(Vcc-2/3Vcc)]
Tw=1.1RC
这种电路产生的脉冲宽度莎w与定时元件R,C大小有关,通常R的取值为几百欧至几兆欧,电容取值为几百皮法到几百微法。
参数设计:为了让时间Tw可以在几秒到几毫秒之间可以看清,则选择电容C=20皮法,电阻R=200k欧姆,此时Tw=20皮法*200K欧姆=0.4S
4 性能的测试:
1.放大整形电路的性能测试。放大倍数为101倍。用信号发生器代替声音信号。仿真电路如图4所示。放大电路性能测试如图5所示。整形电路性能测试如图6所示。
图4 放大整形仿真电路
图5放大电路性能测试图
图6 整形电路性能测试图
3.单稳延时电路性能测试。输入信号为1000Hz,幅值为5V的信号源。仿真电路如图9所示。性能测试如图10所示。
图7 单稳延时仿真电路
本科毕业论文(设计) 题目: 基于51单片机红外感应家用小 夜灯的设计 院系:物理与电子信息科学系 专业:电子信息科学与技术 姓名: 学号: 指导教师:周鸿武 教师职称:讲师 填写日期:2011年5 月 10 日
摘要 本系统采用了热释电红外传感器,它的制作简单、成本低、安装比较方便,而且性能比较稳定,抗干扰能力强、灵敏度高、安全可靠。 人体都有恒定的体温,一般在37度左右,所以会发出特定波长的红外线,人体辐射的红外线的中心波长为9~10um,而热释电红外传感器的波长灵敏度在0.2~20um范围内几乎稳定不变,所以实际系统中常采用的是热释电红外传感器。热释电传感器主要是以非接触的形式对人体辐射的红外线进行检测,将检测到的红外光谱转变成微弱的电信号,然后通过放大电路将微弱的电信号放大,最后经单片机处理以达到驱动电路从而使感应灯发光的效果。 本设计主要包括硬件和软件设计两个部分。硬件部分包括单片机控制电路、红外探头电路、驱动执行发光电路、发光器控制电路等部分组成。软件部分主要是延时程序的设计,处理器采用51系列单片机AT89C51,整个系统是在系统软件的控制下工作的。 关键词:单片机;红外传感器;数据采集;发光电路
Abstract This system uses a pyroelectric infrared sensor, its make simple, low cost, installation are more convenient and more stable performance, strong anti-jamming capability, high sensitivity, safe and reliable. The human body has a constant temperature, be in commonly 37 degrees or so, so will issue certain wavelengths of infrared radiation infrared center for 9 ~ 10um wavelength, and pyroelectric infrared sensor sensitivity in the wavelength of 0.2 ~ 20um range almost constant, so actual system often USES is pyroelectric infrared sensors. Pyroelectric non-contact sensor is mainly by the form of human radiation of infrared testing, detect the infrared spectrum into a weak signal, and then by amplifying circuit will weak signal amplifier, finally SCM processing to achieve driving circuit is thus make induction lamp glow effect. This design includes two parts and the design of hardware and software. Hardware part includes single-chip microcomputer control circuit, infrared sensor circuit, drive execution shine circuit, lighter control circuit components. Software part mainly delay program design, the processor by 51 series microcontroller AT89C51, the whole system is under control work in the system software. Keywords: PIC, Infrared sensor, Data acquisition, Luminous circuit
智能电风扇控制器设计单片机课程设计
智能电风扇控制器设计 单片机课程设计 设计题目:智能电风扇控制器设计
neuq 目录 序言 一、设计实验条件及任务 (2) 1.1、设计实验条件 1.2、设计任务 (2) 二、小直流电机调速控制系统的总体方案设计 (3) 2.1、系统总体设计 (3) 2.2、芯片选择 (3) 2.3、DAC0832芯片的主要性能指标 (3) 2.4、数字温度传感器DS18B20 (3) 三、系统硬件电路设计 (4) 3.1、AT89C52单片机最小系统 (5) 3.2、DAC0832与AT89C52单片机接口电路设计 (6) 3.3、显示电路与AT89C52单片机接口电路设计 (7) 3.4、显示电路与AT89C52单片机电路设计 (8) 四、系统软件流程设计 (7) 五、调试与测试结果分析 (8) 5.1、实验系统连线图 (8) 5.2、程序调试................................................,. (8) 5.3、实验结果分析 (8) 六、程序设计总结 (10) 七、参考文献............................................ (11) 附录 (12) 1、源程序代码 (12) 2、程序原理图 (23)
序言 传统电风扇不能根据温度的变化适时调节风力大小,对于夜间温差大的地区,人们在夏夜使用电风扇时可能遇到这样的问题:当凌晨降温的时候电风扇依然在工作,可是人们因为熟睡而无法察觉,既浪费电资源又容易引起感冒,传统的机械定时器虽然能够控制电风扇在工作一定后关闭,但定时范围有限,且无法对温度变化灵活处理。鉴于以上方面的考虑,我们需要设计一种智能电风扇控制系统来解决这些问题,使家用电器产品趋向于自动化、智能化、环保化和人性化,使得由微机控制的智能电风扇得以出现。 本文介绍了一种基于AT89C52单片机的智能电风扇调速器的设计,该设计主要硬件部分包括AT89C52单片机,温度传感器ds18b20,数模转换DAC0809 电路,电机驱动和数码管显示电路,系统可以实现手动调速和自动调速两种模式的切换,在自动工作模式下,系统能够能够根据环境温度实现自动调速;可以通过定时切换键和定时设置键实现系统工作定时,使得在用户需求的定时时间到后系统自动停止工作。 在日常生活中,单片机得到了越来越广泛的应用,本系统采用的AT89C52单片机体积小、重量轻、性价比高,尤其适合应用于小型的自动控制系统中。系统电风扇起停的自动控制,能够解决夏天人们晚上熟睡时,由于夜里温度下降而导致受凉,或者从睡梦中醒来亲自开关电风扇的问题,具有重要的现实意义。 一、设计实验条件及任务 1.1、设计实验条件 单片机实验室 1.2、设计任务 利用DAC0832芯片进行数/模控制,输出的电压经放大后驱动小直流电机的速度进行数字量调节,并显示运行状态DJ-XX和D/ A输出的数字量。 巩固所学单片知识,熟悉试验箱的相关功能,熟练掌握Proteus仿真软件,培养系统设计的思路和科研的兴趣。实现功能如下: ①系统手动模式及自动模式工作状态切换。
单片机原理及应用课程设计教学大纲 课程设计名称:单片机原理及应用课程设计编号:E1010020 课程设计学分:2.0 课程设计周(时)数:2周课程设计授课单位:测控技术及仪器指导方式: 集体辅导与个别辅导相结合课程设计适用专业:测控技术与仪器、自动化、电气工程及其自动化 课程设计教材及主要参考资料: 《单片机原理及应用》,张毅刚,高等教育出版社,2004年, 《单片机教程》,蔡惟铮编,东北大学出版社,2001年, 服务课程名称:单片机原理服务课程编号:T1010020 服务课程讲课学时:40 服务课程学分:2.5 一、课程设计教学目的及基本要求 1.了解并掌握单片机的原理、结构、指令、运行模式、功能模块及应用开发方法。 2.提高综合运用所学的理论知识独立分析和解决问题的能力。 3.掌握汇编语言的设计和调试。 4. 掌握C-51语言的设计和调试。 二、课程设计内容及安排 1.掌握各种进制数的特点及其转换方法。 2.掌握MCS-51单片机的硬件结构的特点,详细了解MCS-51单片机的各种资源。 3.了解单片机的指令系统、指令格式及其意义。 4.理解中断的基本概念,了解单片机的中断响应。 5.掌握存储器的分类,熟练掌握存储器的扩展。 6.了解单片机的接口技术及其串行通讯方式。 7.编写课程设计报告,掌握汇编语言的设计和调试方法。 设计题目: 1.交通灯控制系统 实验目的:(1)学习输出口的使用方法;(2)学习延时子程序的编写;(3)交通灯的控制规律 实验要求:设计并且制作交通灯控制系统,编制控制系统监控软件;交通灯控制软件,要求以单片机为核心,P1口输出口接三只发光二极管(红绿黄), 编写程序,使发光二极管按交通灯的控制规律点亮。 思考问题:改变延时常数,使发光二极管闪亮时间改变。红绿灯不允许同时点亮,红绿灯交换时黄灯闪烁,考虑车流量情况,改变交通灯指挥状况,单路 口/多路口情况,寻求最佳交通流量。
附件B: 毕业设计(论文)开题报告 1、课题的目的及意义 随着电子制造业的不断发展,社会对生产率的要求越来越高,各行业都需要精良高效、高可靠性的设备来满足要求。作为一种老式家电,电风扇曾一度被认为是空调产品冲击下的淘汰品;但电风具有价格便宜、摆放方便、体积轻巧等特点。由于大部分家庭消费水平的限制,电风扇作为成熟的家电行业的一员,在中小城市以及乡村将来一段时间内仍然会占有市场的大部分份额,但老式电风扇功能简单,不能满足智能化的要求。为提高电风扇的市场竞争力,使之在技术含量上有所提高,且更加安全可靠,智能电风扇随之被提出。 传统电风扇具有以下缺点:风扇不能随着环境温度的变化自动调节风速,这对那些昼夜温差大的地区是致命的缺点,尤其是人们在熟睡时,不但浪费资源,还很容易使人感冒生病;传统电风机械的定时方式常常会伴随着机械运动的声音,特别是夜间影响人们的睡眠,而且定时范围有限,不能满足人们的需求。鉴于这些缺点,我们需要设计一款智能的电风扇温度控制系统来解决。 2、国内外研究现状 电风扇在中国仍然具有很大的市场,所以我国对电风扇的优化研究是很积极的。智能电风扇已经开始投入市场,目前这方面的技术已经成熟。下一阶段的研究将是使其更加人性化,更好的满足不同群体的人的需求。美的等家电企业相继推出了大厦扇和学生扇,这是针对不同的人群而专门研制的,具有智能化控制系统的电风扇。 国外在电风扇方面的研究相对我国不那么积极,但是在智能化电器方面的研究却比我国更加成功。“智能化电器”包含三个层次:智能化的电器元件,如智能化断路器、智能化接触器和智能化磁力启动器等,智能化开关柜和智能化供配电系统。智能化开关柜包含多台断路器,而且供电系统的控制与用电设备的控制关系很密切。这两个层次上的智能化工作重点是:加强网络功能,最大限度地提高配电系统和用电设备的自动化水平。 新型的智能化电器元件的发展趋势:采用微处理器及可编程器件,大量功能“以软代硬”实现,并具有“现场”设计的能力。充分增加智能化电器元件的“柔
1 机 械 原 理 课 程 设 计 台式电风扇摇头装置设计 起止日期: 2014 年 6 月 24日 至 2014 年 6 月 29日 学生姓名学号 11405701404 学生姓名学号 12405700302 学生姓名学号 12405700304 班级 机械1203班 成 绩 指导教师(签字) 机械工程学院(部) 2014年06 月 29 日
目录 一.设计要求 (3) 二设计任务 (3) 三.功能分解 (4) 四.选用机构 (4) 4-1.减速机构选用 (5) 4-2.离合器选用 (5) 4-3.摇头机构选用 (8) 4-4.机构组合 (9) 五.机构的设计 (10) 5-1.铰链四杆机构的设计 (10) 5-2.四杆位置和尺寸的确定 (11) 5-3.传动比的分配 (13) 六.摇头装置三维实体图 (15) 七.摆角调节 (17) 八.总结 (17) 九.参考文献 (19)
台式电风扇摇头装置方案 一.设计要求 设计台式电风扇的摇头装置要求能左右旋转。以实现一个动力下扇叶旋转和摇头动作的联合运动效果。 台式电风扇的摇头机构,使电风扇作摇头动作。风扇的直径为300mm,电扇电动机转速n=1450r/min,电扇摇头周期t=10s。电扇摆动角度ψ与急回系数K的设计要求及任务分配见表。 电扇摇摆转动 方案号 摆角ψ/(°)急回系数K 二. 设计任务 ⑴按给定的主要参数,拟定机械传动系统总体方案; ⑵画出机构运动方案简图; ⑶分配蜗轮蜗杆、齿轮传动比,确定他们的基本参数,设计计算几何尺寸; ⑷确定电扇摇摆转动的平面连杆机构的运动学尺寸,它应满足摆角Ψ及急回系数K条件下使最小传动角 最大。并对平面连杆机构进行运动分析,绘制运动线图,验算曲柄存在的条件;
基于单片机的声光控制模拟路灯 (程序部分) 前言:单片机是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计数器等功能集成到一块硅片上构成的一个小而完善的微型计算机系统,在工业控制领域广泛应用。本次我们采用at89c51单片机设计一种基于单片机控制的声光控制模拟路灯。该灯有声控,光控,声光同时控制楼道灯三种模式,经过调查,现在绝大多数小区的楼道灯都是纯电路形式实现声光控制的,这较之智能控制缺乏功能多样性,稳定性,而未来肯定是智能化的天下,所以我们用单片机模拟这一个多功能灯的系统。 关键字:单片机,at89c51,智能社区,楼道灯 目录: 一、设计目的 (2) 二、总体设计 (2) 方案选择: (2) 三、硬件设计 (3) 原理说明: (3) 四、软件设计 (3) 主要程序清单: (3) 程序框图: (5) 五、实验结果 (6) 六、总结 (6)
通过此次设计,主要是为了巩固我们的单片机相关知识及对单片机的相关应用,培养电子系统设计与实践的能力,学会设计使用简易的声、光传感器,并能用这些传感器设计一个声光控制的路灯(楼道灯)。 完成功能: 1)、声控灯模式。当传感器接收到声音信号时,单片机控制灯亮,并在5秒后灯自动熄灭。 2)、光控等模式。当光电传感器接收到为暗光时,灯自动点亮,接收到为亮光时,等自动熄灭。 3)、楼道灯模式。声光控制结合,即模拟当天暗并且楼道里有人走过的时候灯自动点亮5秒后熄灭。 二、总体设计 此次设计的声光控制灯包括三个基本模块,即声音处理模块、光处理模块、单片机小系统。总体设计框图如下: 图1、总体设计框图 方案选择: 1)、单片机部分。由于此次设计对单片机的要求较低,所以我们选择最为常用的at89c51单片机作控制部分。 2)、声控部分 一:选择专用的声音传感器模块来完成,能得到正确的波形、电压、频率等参数,且设计电路简单省事,但成本较高。 二:用驻极体话筒通过相应的信号处理电路对声音信号进行处理,成本较低,但电路设计麻烦。 综上所述:我们选择方案二,因为此次设计对声音信号的波形等参数要求较小,只要单片机接收到并能判断为高电平即可。 3)、光控部分 一:用光敏二极管作光电元件,光敏二极管对光转换为相应的电流。 二:用光敏电阻作光电元件,光敏电阻对光转换为相应的电阻。 综上所述:我们选用光敏电阻作光控部分的核心元件,因为光敏二极管转换成的是电流,而我们需要判断的是电压信号,将电流转换为电压信号的电路较复杂。
毕业论文开题报告 机械设计制造及其自动化 智能电风扇控制系统设计 一、选题的背景和意义 近几年,我国电风扇市场发展迅速,产品产出持续扩张,国家产业政策鼓励电风扇产业向高技术产品方向发展,国内企业新增投资项目投资逐渐增多。投资者对电风扇市场的关注越来越密切,这使得电风扇市场推广策略与营销渠道开发的发展研究需求增大。 随着计算机技术、控制技术、信息技术的快速发展,工业的生产和管理进入了自动化、信息化和智能化时代,智能化已经成为时代发展的需要。基于生产现场和日常生活的实际需要,研究和开发智能电风扇控制具有十分重要的意义。该项目的研究可以应用于工厂自动化、仓库管理、智能玩具和民用服务等领域,可提高劳动生产效率,改善劳动环境。 AT89S52单片机芯片制作的“电风扇定时开关电路”,允许用户随时通过按键开关自行输入设置新的定时时间参数,其范围可在1分钟(最短时间)至999分钟(最长时间)之间任意设置(步进为1分钟),这为用户根据使用的环境温度、自己身体条件、个人爱好等具体情况,适时进行调整设置,选用最合适的定时时间提供了方便。而且在整个定时状态下,电路具有允许用户随时自行选择使用“阵风”或“连续风”的控制功能。具有电路简单、制作容易、设置方便、使用灵活等优点。 本设计来源于在企业学习生活当中的深刻感受,天气开始炎热的时候,人们都会开着电扇入睡,但是往往睡着了都会忘记去关,所以我们可以对电扇进行定时,到了一定时间,电扇就会自动停止工作。而且夏天的晚上总是很容易着凉,所以睡觉的时候就可以根据自己的身体情况改变风速,可以改成阵风或者连续风。所以该作品是为解决此问题而设计的AT89C51单片机风扇控制器。 二、研究目标与主要内容 研究目标:本课题主要是设计一套智能电风扇控制系统,该系统设计以AT89S51单片机为核心控制器,通过DS18B20温度传感器对室内环境温度进行数据采集,单片机对采集到的温度信号进行处理并输出一定占空比的PWM,电风扇随温度变化而自动变换档位,实现“温度高,风力大;温度低,风力弱”的性能。另外,通过键盘控制面板,用户可
《单片机原理与应用》课程设计题目 1.基于单片机的电子秒表 本设计以MCS-51系列单片机为核心,采用常用电子器件设计,一个电源开关,两个按键,三位数码管显示,打开电源开关后显示8,每秒循环左移一位,即□□8—>□8□—>8□□—>□□8—>…,按A键开始计时,实时显示所经历的时间,按B键停止计时并显示从开始到当前时刻的时间,要求精确到0.1秒,量程为0~99.9秒。 要求按键输入采用中断方式,按键A接INT0,按键B接INT1。 2.智能电动百叶窗 本设计以MCS-51系列单片机为核心,采用常用电子器件设计,一个电源开关,用一台直流电机控制百叶窗叶片的旋转(正转/反转),用一个光敏电阻传感器测量室内光强度,并用两位数码管显示测量结果,设置三个按键:手动/自动切换、手动正转和手动反转,用一个发光二极管显示手动/自动状态,自动状态时二极管亮。 设置两个极限位置保护行程开关,用于保护百叶窗叶片:当正转到极限位置压下行程开关时,电机停止正转,但还可以反转;当反转到极限位置压下行程开关时,电机停止反转,但还可以正转。 按键输入采用中断方式,按键中断请求信号接INT0. 单片机根据设定光强S1和S2(S2 > S1)和实测光强P控制电机M的动作:当P<=S1时,控制M正转以增加进光量; 当P>S2时,控制M反转以减少进光量; 当S1 题目名称:智能电风扇的设计 摘要:本设计以MSP430F149单片机为核心控制模块,采用HS0038光电传感器 和DS18B20温度传感器来测量电风扇的转速和检测时刻环境温度,通过主从单片机之间的串行通信来完成电风扇转速数据处理、模式控制和转速控制等,采用PWM 脉冲调制技术来控制风扇的转速,用键盘和HB12864液晶显示来实现人机交互,用红外发射和接受装置来完成遥感控制功能。该系统有电风扇的无级调速,并可以对电风扇的转速进行设置和转速的实时测试与显示、具有睡眠风、自然风等多种工作模式可以选择、能显示日期、时间、温度、风扇转速、运行模式等等信息和实现定时自动开、关机等功能,系统结构简单,步进小、精度高等优点。 关键词:单片机红外遥控智能控制风扇 Abstract:This design to MSP430F149 microcontroller as the core control module, the HS0038 photoelectric sensor and DS18B20 temperature sensor to measure the speed of the electric fan and testing time, through the master-slave SCM environment temperature of serial communication between to complete the electric fan speed data processing, pattern control and speed control and so on, USES the PWM pulse modulation technology to control the speed of the fans, use the keyboard and HB12864 liquid crystal display to realize human-machine interaction, with infrared emission and accept device to complete remote sensing control function. The system has the fan stepless speed regulation, and to the electric fan speed setting and speed of the real-time testing and display, with the wind, such as natural sleep DuoZhong work models to choose, can show the date, time, temperature, fan speed, the mode of operation and so on information and realize the automatic shutdown open, such as timing function, system structure is simple, step into small, high precision of advantages. Keyword: temperature sensor;infrared remote control;intelligent control;fan 课程设计台式电风扇摇头装置机构 姓名:_____________ 学号:_____________ 专业:_____________ 指导教师:_____________ 台式电风扇摇头装置机构设计 摘要 电风扇摇头装置设计是从电风扇设计开始的,也是电风扇设计中最重要的 部分,对于电风扇的研究,国内外已有不少的研究成果,但在创新这一块做的 还不够, 还有待进一步完善。 本文首先对摇头电风扇的历史和发展现状以及其类型和特点进行了介绍,然后介绍了设计准则, 提出方案拟定, 并选择最优方案,主要是现有的电风扇摇头装置中平面摇杆机构,包括平面摇杆机构的结构、工作原理、设计原理、设计原则;其次根据已知原动机的转速, 分配传动比,选择合适的机构, 如蜗轮蜗杆机构以及齿轮机构, 根据传动比确定它们的基本参数,设计计算几何尺寸,再次采用图解法, 根据已知条件(极位夹角, 摇杆速度等)设计平面四杆机构, 然后在实验室组建仿真机构模型, 观察所设计的尺寸是否满足所需的运动轨迹,再就制作台式电风扇摇头平面机构的计算机动态演示, 通过图解法研究各杆件的运动, 进行运动分析, 最后总结并讲述了电风扇的未来展望。 关键词:平面摇杆机构,传动比, 蜗轮蜗杆, 齿轮传动, 运动分析 ,动态演示 目录 第一章引言 (5) 1.2.2 电风扇工作原理 (6) 第二章电风扇摇头机构的设计 (7) 2.1 电风扇摇头机构设计概述 (7) 2.2 电风扇摇头装置设计原则[1 (8) 2.3 电风扇摇头装置方案拟定[2] (8) 2.3.1 方案Ⅰ (平面连杆摇头机构) (8) 2.3.2 方案Ⅱ (另一种平面连杆摇头机构) (9) 2.3.3 对比分析选择方案 (10) 第三章机构的设计 (10) 3.1 铰链四杆机构的设计[5 (10) 3.1.1 铰链四杆机构的组成和基本形式 (10) 3.1.2平面双摇杆机构的分类和极限位置分析 (11) 3.1.3 四杆位置和尺寸的确定 (12) 3.2 原动机的选择和传动比的分配[6] (14) 3.2.1 原动机的选择 (14) 3.2.2 传动比的分配 (16) 3.3 蜗轮蜗杆机构的结构特点[6 (16) 3.3.1蜗轮蜗杆机构的结构特点 (16) 3.3.2 蜗轮蜗杆机构的几何尺寸计算 (17) 智能电风扇控制器设计 序言 传统电风扇不能根据温度的变化适时调节风力大小,对于夜间温差大的地区,人们在夏夜使用电风扇时可能遇到这样的问题:当凌晨降温的时候电风扇依然在工作,可是人们因为熟睡而无法察觉,既浪费电资源又容易引起感冒,传统的机械定时器虽然能够控制电风扇在工作一定后关闭,但定时范围有限,且无法对温度变化灵活处理。鉴于以上方面的考虑,我们需要设计一种智能电风扇控制系统来解决这些问题,使家用电器产品趋向于自动化、智能化、环保化和人性化,使得由微机控制的智能电风扇得以出现。 本文介绍了一种基于AT89C52单片机的智能电风扇调速器的设计,该设计主要硬件部分包括AT89C52单片机,温度传感器ds18b20,数模转换DAC0809电路,电机驱动和数码管显示电路,系统可以实现手动调速和自动调速两种模式的切换,在自动工作模式下,系统能够能够根据环境温度实现自动调速;可以通过定时切换键和定时设置键实现系统工作定时,使得在用户需求的定时时间到后系统自动停止工作。 在日常生活中,单片机得到了越来越广泛的应用,本系统采用的AT89C52单片机体积小、重量轻、性价比高,尤其适合应用于小型的自动控制系统中。系统电风扇起停的自动控制,能够解决夏天人们晚上熟睡时,由于夜里温度下降而导致受凉,或者从睡梦中醒来亲自开关电风扇的问题,具有重要的现实意义。 一、设计实验条件及任务 1.1、设计实验条件 单片机实验室 1.2、设计任务 利用DAC0832芯片进行数/模控制,输出的电压经放大后驱动小直流电机的速度进行数字量调节,并显示运行状态DJ-XX和D/ A输出的数字量。巩固所学单片知识,熟悉试验箱的相关功能,熟练掌握Proteus 仿真软件,培养系统设计的思路和科研的兴趣。实现功能如下: ① 系统手动模式及自动模式工作状态切换。 智能电风扇控制器设计 ② 风速设为从高到低9个档位,可由用户通过键盘手动设定。③ 定时控制键实现定时时间设置,可以实现10小时的长定时。 ④ 环境温度检测,并通过数码管显示,自动模式下实现自动转速控制。⑤ 当温度每降低1℃则电风扇风速自动下降一个档位,环境低于21度时,电风扇停止工作。 ⑥ 当温度每升高1℃则电风扇风速自动上升一个档位。环境温度到30度以上时,系统以最大风速工作。 ⑦ 实现数码管友好显示。 二、小直流电机调速控制系统的总体设计方案 2.1、系统硬件总体结构 图2.1系统硬件总体框图 2.2、芯片选择 单片机原理与接口技术课程设计题目汇总 说明:为便于同学提前探讨开发思路,特将本课程设计的可选题目发给大家。 每个同学可以在以下题目中选一题要求:课程设计考核内容包括:源程序;设计报告文档基于单片机的电子时钟设计设计内容:1、用LCD液晶作为显示设备(30分) 2、可以分别设定小时,分钟和秒,复位后时间为:00: 00:00 (30 分) 3、能实现日期的设置,年、月、日(30分) 4、其他创新内容(10分)如:闹钟功能;显示星期;整点音乐报时等。 图示: 2010-04-09 MON 11:06:42 基于单片机的交通灯显示系统(一) 设计内容:1、东西方向、南北方向均有红、黄、绿三种信号灯;(30 分) 2、带紧急制动按钮,按钮按下,所有方向亮红灯;再次按下,恢复正常显 示(20分) 3、夜间模式按钮按下,所有方向显示黄灯闪烁(20分) 4、实时提醒绿灯亮的剩余时间(30分)图示: 基于单片机的交通灯显示系统(二) 设计内容:1、东西干道和南北干道的通行分左行、右行、直行,其中左行、右行固定15秒;直行固定30秒(40分) 2、信号灯分绿灯(3种)、红灯、黄灯,每次绿灯换红灯时,黄灯亮3秒 钟。(30分) 3、东西干道和南北干道交替控制,每次干道绿灯交替时,有 3 秒钟所有干道的交通灯都是黄灯闪烁3秒钟,提示已经进入路口的车辆迅速通过。(30分) 4、其他创新内容。(10分) 图示: 四、基于单片机的波形发生器设计 设计内容:1、设计一款能产生3种以上波形的波形发生器(30分) 2、设计波形选择按钮(采用3个独立按键)(10分) 3、点阵显示波形图案(20分) 4、能同时输出两种波形(30分) 5、显示频率(10分) 图示: 五、基于单片机的LED点阵广告牌设计 设计内容:1、能显示不同字符、图形的LED点阵广告牌(30分) 2、用独立按键控制不同字符的切换效果(如闪烁、静止、平移)(30 分) 3、可通过串口从电脑下载更新需要显示的字符(30分) 4、其他创新功能(10分) 图示:略 六、基于单片机的篮球计分器设计 设计内容:1、设计LCD显示篮球比分牌(30分) 2、通过加分按钮可以给A队或B队加分(20分) 3、设计对调功能,A队和B队分数互换,意味着中场交换场地。(20 分) 4、显示比赛倒计时功能(20分) 5、创新内容:如显示第几小节(10分) 显示: A 083: B 079 4th Period 10:25 一、题目:台式电风扇摇头装置 二、设计题目及任务 2.1设计题目 设计台式电风扇的摇头机构,使电风扇做摇头动作(在一定的仰角下随摇杆摆动)。 风扇的直径为300mm,电扇电动机转速n=1450r/min,电扇摇头周期t=10s。电扇摆动角度ψ,仰俯角度φ与急回系数K的设计要求及任务分配表见表2.11. 表2.11 台式电风扇摆头机构设计数据 此次选择的是方案C:摆角为ψ=90°,急回系数K=1.02,仰角φ=15°。 2.2设计任务 (1)按给定主要参数,拟定机械传动系统总体方案。 (2)画出机构运动方案简图。 (3)分配涡轮蜗杆、齿轮传动比。确定它们的基本参数,设计计算几何尺寸。 (4)确定电扇摇摆转动的平面连杆机构的运动学尺寸,它满足摆角ψ及急回系数K条件下使最小传动比角γmin最大。并对平面连杆机构进行运动分析,绘制运动线图,验算曲柄存在条件。 (5)编写设计计算说明书。 (6)学生可进一步完成台式电风扇摇头机构的计算机动态演示或模型试验验证。 2.3设计提示 (1)常见的摇头机构有杠杆式、滑板式和揿拔式等。可以将风扇的摇头动作分解为风扇的左右摆动和风扇的上下俯仰运动。风扇摇摆转动可以采用平面连杆机构实现。以双摇杆机 构的连杆为主动件(即风扇转子通过涡轮蜗杆带动连杆传动),则其中一个连架杆的摆动即实现风扇的左右摆动(风扇安装在连架杆上)。机架可选取80~90mm。风扇的上下仰俯运动可采用连杆机构、凸轮机构等实现。 (2)还可以采用空间连杆机构直接实现风扇的左右摆动和上下仰俯的复合运动。 三、功能分解 现市售电风扇的机头一般只是做单一的左右摆头动作,可结合手动调节机头俯仰角度来改变受风区域,但正常工作时机头的俯仰角往往是固定的,只依靠机头自身左右摆动来送风,因此受风区域、面积有限。 本台式电风扇是立体送风电风扇,该电风扇有两种实现方式。即风扇左右摆动和风扇上下俯仰运动。 3.1风扇的左右摇摆运动 风扇在开启后,需要调整受风区域时,则自然希望风扇能摇头,增加、改变受风的区域。一般是风扇在启动摇头时,风扇是左右摇摆的。当然,风扇的左右摇摆一般是在一个平面内,并且是有范围限制的。但也有一些摆角是大于180°的,甚至更大的。 3.2风扇的上下俯仰运动 随着科技的发展,很多风扇能在风扇左右摇摆的同时,能借助相应的构件作上下俯仰运动,实现立体宽区域送风。 四、机构的选用 根据前述设计要求,并且根据技术、经济及相容性要求,确定两种运动的执行元件——机头,选用相应的机构来实现各项运动的功能,见表4.1。 表4.1 台式电风扇的机构选型 仅对表4.1的基本结构进行组合,就可以得到2×2=4种运动方案。初步选出结构简单又较为可行的方案为:左右摇摆运动采用凸轮机构中带有凹槽的圆柱凸轮机构,上下俯仰运 课程设计报告 华中师范大学武汉传媒学院 传媒技术学院 电子信息工程2011 仅发布百度文库,版权所有. 单片机课程设计 一、设计题目、要求 题目:声控灯设计 要求:A.使用单片机实现声控灯 B.当说话声音大于一定程度时,发光二极管显示,延时大于1秒 二、设计框图 1、硬件框图 三、方案设计 如果要让接在P1.0口的LED1亮起来,那么只要把P1.0口的电平变为低电平就可以了;相反,如果要接在P1.0口的LED1熄灭,就要把P1.0口的电平变为高电平;同理,接在P1.1~P1.7口的其他7个LED的点亮和熄灭的方法同LED1。因此,要实现流水灯功能,我们只要将发光二极管LED1~LED8依次点亮、熄灭,8只LED灯便会一亮一暗的做流水灯了。在此我们还应注意一点,由于人眼的视觉暂留效应以及单片机执行每条指令的时间很短,我们在控制二极管亮灭的时候应该延时一段时间,否则我们就看不到“流水”效果了。 四、硬件原图设计 五、程序流程图 六、仿真图 仿真结果如下:当S2关闭 当S3关闭 七、制作 八、调试 流水灯制作完成后,我们对它进行了调试,一开始灯不停地闪,无法接受到声音信号。后来,我们对PCB进行了检查,发现有放大电路的集电极连接线断路了,导致声音信号没法被芯片接收到。我们迅速的电路进行了修复。修复后,电路能够顺利的进行工作了。 九、心得体会 回顾起此课程设计,至今我仍感慨颇多,从理论到实践,在这段日子里,可以说得是苦多于甜,但是可以学到很多很多的东西,同时不仅可以巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。在今后社会的发展和学习实践过程中,一定要不懈努力,不能遇到问题就想到要退缩,一定要不厌其烦的发现问题所在,然后一一进行解决,只有这样,才能成功。 在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足。比如在调试的时候,程序老是不稳定中断服务程序有时执行一次,有时又执行两次,开始我以为是板子受环境影响。后来在网上百度才知道是软件问题,是我忘了在执行中断服务程序时候把相应的中断关了,导致在执行中断服务程序时易受影响执行两次或两次以上。在这个发现问题之后,我在中断服务程序中关了相应的外中断之后。问题就解决了,下载程序到板子之后,运行就正常了。 中国网络大学CHINESE NETWORK UNIVERSITY 本科毕业设计(论文) 智能风扇控制器设计 院系名称: 专业: 学生姓名: 学号:123456789 指导老师: 中国网络大学教务处制 20 年03月30日 智能风扇控制器设计 前言 随着人们生活水平及科技水平的不断提高,现在家用电器在款式、功能等方面日益求精,并朝着健康、安全、多功能、节能等方向发展。过去的电器不断的显露出其不足之处。 电风扇曾一度被认为将是空调产品冲击下的淘汰品,其实并非如此。家用电风扇并没有随着空调的普及而淡出市场,其主要原因:一是风扇和空调的降温效果不同——空调有强大的制冷功能,可以快速有效地降低环境温度,但电风扇的风更温和,更加适合老人儿童和体质较弱的人使用;二是电风扇有价格优势,价格低廉而且相对省电,安装和使用都非常简单。 尽管电风扇有其市场优势,但传统电风扇还是有许多地方应当进行改良的。现在大部分电风扇只有手动调速,加上一个定时器,其功能比较单一,最突出的缺点是它不能根据温度的变化适时调节风力大小,对于夜间温差大的地区,人们在夏夜使用电风扇时可能遇到这样的问题:当凌晨降温的时候电风扇依然在工作,可是人们因为熟睡而无法察觉,既浪费电资源又容易引起感冒,传统的机械定时器虽然能够控制电风扇在工作一定后关闭,但定时范围有限,且无法对温度变化灵活处理。如果能使电风扇处于两种不同的工作模式,模式一能对风扇实现手动控制,进行定时设置和档位调节,模式二具有对环境进行检测的功能,根据实时环境温度进行风速自动调节和当房间里面没有人时能自动的关闭电风扇,使风扇处于待机状态,当有人进入时自动开启并启动定时器控制,这样一来就避免了上述的不足。本次设计就是围绕这些方面对现有电风扇进行改进。 1 方案设计与论证 本设计能对风扇实现手动控制,进行定时设置和档位调节,同时具有对环境进行检测的功能,根据实时环境温度进行风速自动调节和当房间里面没有人时能自动的关闭电风扇,使风扇处于待机状态,当有人进入时自动开启并启动定时器控制。 1.1 遥控设计方案与论证 1.1.1 超声波遥控方案 超声波传感器是运用超声波的特质发明出来的一种传感器。超声波的振动频率高于声波,是通过换能晶片在电压的激励下出现振动 而产生的,其有波长短、频率高、方向性好、绕射现象小、可以成为射线定向传播 智能电风扇设计 【摘要】 本设计以A T89S52单片机为控制中心,主要通过提取热释电红外传感器感应到的人体红外线信息和温度传感器DS18B20得到的温度以及内部定时器设定时间长短来控制电风扇的开关及转速的变化。 目录 引言 (3) 1、总体方案设计及功能描述 (4) 2、功能模块硬件简介与实现 (4) 2.1、键盘输入电路 (4) 2.2、热释电红外传感器模块 (4) 2.2.1、热释电红外线传感器原理简介 (4) 2.2.2、热释电红外线传感器应用 (5) 2.3、温度传感器 (5) 2.3.1、温度传感器DS18B20简介 (5) 2.3.2、DS18B20读写及初始化时序 (5) 2.3.3、DS18B20的一般操作过程 (6) 2.3.4、DS18B20的温度存储方式即温度计算 (6) 2.4、数码管显示电路 (6) 2.4.1、74ls164简介 (6) 2.4.2、共阴极八段数码管简介 (6) 2.4.3、显示电路设计 (7) 2.5、发光二极管电路 (7) 2.6、蜂鸣器电路 (7) 2.7、继电器控制电路 (8) 2.7.1、继电器简介 (8) 2.7.2、继电器驱动电路设计及工作原理简介 (8) 2.8、整体电路硬件设计 (9) 3、AT89S52软件设计与实现 (10) 3.1、整体设计思路介绍 (10) 3.2、主要部分流程图 (10) 3.2.1、主程序流程图 (10) 3.2.2、外部中断流程图 (10) 3.2.3、定时器0中断流程图 (11) 3.2.4、定时器1中断流程图 (11) 4、总结 (11) 致谢词 (12) 参考文献 (12) 附页: (13) 引言 令狐文艳创作 机械原理课程设计说明书 令狐文艳 台式电风扇摇头装置 设计者: 学号: 院系: 班级: 小组成员: 辅导教师: 时间: 目录 一.设计题目…………………………………… 二.计划任务…………………………………… 三.设计提示…………………………………… 四.功能分解…………………………………… 五.机构的选用………………………………… 六.机构组合设计与说明………………………… 七.方案评价及相关计算………………………… 八.小组中三个方案的评价与择优……………… 九.设计体会…………………………………… 一.设计题目 设计台式电风扇的摇头机构,使电风扇做摇头动作(在一 定的仰角下随摇杆摆动)。 风扇的直径为300mm,电扇电动机转速n=1450r/min,电扇摇头周期t=10s。电扇摆动角度ψ,仰俯角度φ与急回系数K的设计要求及任务分配表见表2.11. 表2.11 台式电风扇摆头机构设计数据 我选择方案D:摆角为ψ=95°,急回系数K=1.025。 二.计划任务 (1)按给定的主要参数,拟定机械传动系统总体方案。 (2)画出机构运动方案简图。 (3)分配蜗轮蜗杆、齿轮传动比,确定它们的基本参数,设计计算几何尺寸。 (4)确定电风扇摇摆转动的屏幕、平面连杆机构的运动学尺寸,它应满足摆角及急回系数K条件下使最小传动角最大。并对平面连杆机构进行运动分析,绘制运动线图,验算曲柄存在条件。 (5)编写设计计算说明书。 (6)学生可进一步完成台式电风扇摇头机构的计算机动 态演示或模型试验验证。 三.设计提示 (1)常见的摇头机构有杠杆式、滑板式和揿拔式等。可以将电风扇的摇头动作分解为风扇左右摆动和风扇上下俯仰运动。风扇要摇摆转动克采用平面连杆机构实现。以双摇杆机构的连杆作为主动件(即风扇转子通过蜗轮蜗杆带动连杆传动),则其中一个连架杆的摆动即实现风扇的左右摆动(风扇安装在连架杆上)。机架可取80~90 mm。风扇的上下俯仰运动可采取连杆机构、凸轮机构等实现。 (2)还可以采用空间连杆机构直接实现风扇的左右摆动和上下仰俯的复合运动。 四.功能分解 为完成风扇左右俯仰的吹风需要实现下列运动功能要求:在扇叶旋转的同时扇头能左右摆动一定的角度,因此,应设计设计相应的左右摆动机构完成风扇摇头或不摇头的吹风过程,所以必须设计相应的离合器机构。 扇头的仰俯角调节,这样可以增大风扇的吹风范围。因此需要设计扇头俯仰角调节机构(本方案设计为外置条件旋钮)。 五、机构的选用 1、驱动方式采用电动机驱动。为完成风扇的左右摆动的吹 风过程,采用弧形的轨道装置,轨道中间用一个半圆的滚轮,它结构简单,制造容易,工作可靠,实现风扇平电子设计大赛之智能电风扇的设计
台式电风扇摇头机构设计
智能电风扇控制器设计
单片机课程设计题目汇总(全)
课程设计《台式电风扇摇头装置》
51单片机课程设计 声控灯
电子信息专业论文设计 智能风扇控制器设计
智能电风扇设计
机械原理课程设计台式电风扇摇头装置之令狐文艳创作
相关主题
文本预览