桂林电子科技大学
实验报告
2016-2017 学年第一学期
'
开课单位海洋信息工程学院
适用年级、专业 14级机械设计制造及其自动化
课程名称《单片微型计算机与接口技术-课内实验》
主讲教师周旋
课程序号 BS1615000_03
课程代码 BS1615000
实验名称《动态显示技术》
学号 16 - 17
姓名林亦鹏卢炳荣
?
动态显示技术实验报告
一、实验目的
1、掌握动态显示技术。
2、掌握数码管与单片机的连接方法。
3、掌握段代码表的推算及数据表的使用方法。
4、掌握C语言编程方法。
—
二、实验内容
实验设备:计算机一台、单片机实验箱一台、Proteus软件、Keil软件。
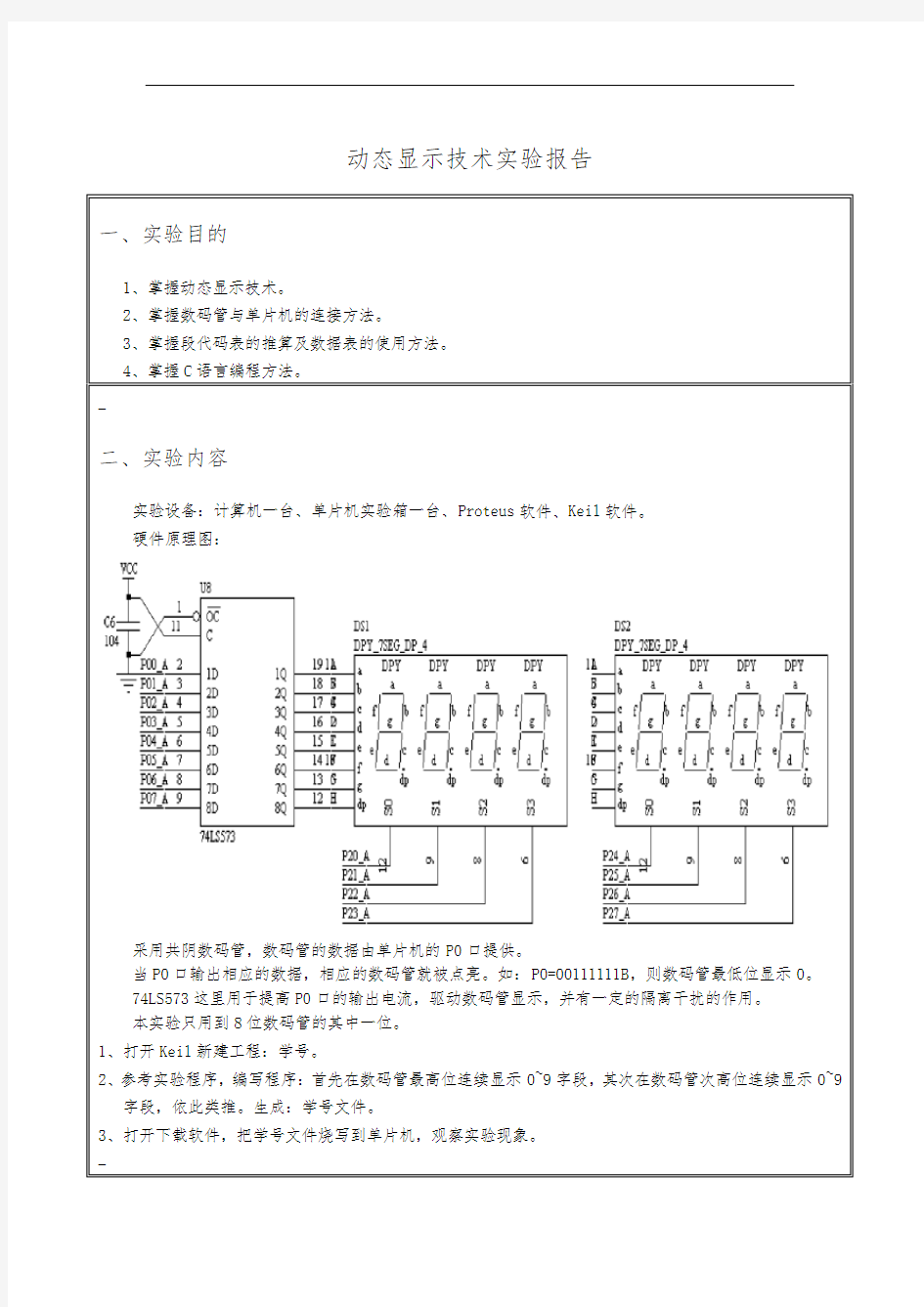
硬件原理图:
采用共阴数码管,数码管的数据由单片机的P0口提供。
当P0口输出相应的数据,相应的数码管就被点亮。如:P0=00111111B,则数码管最低位显示0。
74LS573这里用于提高P0口的输出电流,驱动数码管显示,并有一定的隔离干扰的作用。
本实验只用到8位数码管的其中一位。
1、打开Keil新建工程:学号。
2、参考实验程序,编写程序:首先在数码管最高位连续显示0~9字段,其次在数码管次高位连续显示0~9
字段,依此类推。生成:学号文件。
3、打开下载软件,把学号文件烧写到单片机,观察实验现象。
—
4、修改程序,将自己的学号显示在数码管上。
1、思考动态显示的工作原理。
2、各寄存器的使用。
3、读懂实验程序。
三、实验结果分析
1、程序流程图/**************************************
* 实验名 : 动态显示技术
* 实验说明 : 8位数码管显示0~7
**************************************
;
#include<>
//--定义使用的IO口--//
#define GPIO_DIG P0 //段选
#define GPIO_PLACE P1 //位选
//--定义全局变量--//
unsigned char code DIG_PLACE[8] = {
0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//位选控制,查
表的方法控制
unsigned char code DIG_CODE[17] = {
0x06,0x66,0x06,0x7d,0x3f,0x06,0x3f,0x6d,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
//0、1、2、3、4、5、6、7、8、9、A、b、C、d、E、F的显示
码
—
unsigned char DisplayData[8];
//用来存放要显示的8位数的值
//--声明全局函数--//
void DigDisplay(); //动态显示函数
void main(void)
{
unsigned char i;
for(i=0; i<8; i++)
{
DisplayData[i] = DIG_CODE[i];
》
}
while(1)
{
DigDisplay();
数码管动态显示实验 一、实验要求 1.在Proteus软件中画好51单片机最小核心电路,包括复位电路和晶振电路 2.在电路中增加四个7段数码管(共阳/共阴自选),将P1口作数据输出口与7段数码 管数据引脚相连,P2.0~P2.3引脚输出选控制信号 3.在Keil软件中编写程序,采用动态显示法,实现数码管显示变量unsigned int show_value的值(show_value的值范围为0000~9999),即把show_value的千百 十个位的值用数码管显示出来。 二、实验目的 1.巩固Proteus软件和Keil软件的使用方法 2.学习端口输入输出的高级应用 3.掌握7段数码管的连接方式和动态显示法 4.掌握查表程序和延时等子程序的设计 三.实验说明 (条理清晰,含程序的一些功能分析计算) 如下图(五)所示,由P1口将要显示的数字输给七段数码管;再由P2第四位输给数码管的公共端,作为扫描输入信号;用外部中断P3.2和P3.3分别接PB1与PB2,实现数字的增减。所要实现的功能是,开始运行电路功能图时,四个数码管分别显示0000,按下PB1增1,直到9999回到0000,相反按下PB2减1,直到0000回到9999。 在算相关数据时,由于要显示个十百千的不同数字,要调用disp函数, disp[0]=show/1000; //显示千位的值 disp[1]=show%1000/100; //显示百位的值 disp[2]=show%100/10; //显示十位的值 disp[3]=show%10; //显示个位的值 本实验需要用到IE寄存器与TCON寄存器。 四、硬件原理图及程序设计 (一)硬件原理图设计
信号与系统仿真实验报告1.实验目的 了解MATLAB的基本使用方法和编程技术,以及Simulink平台的建模与动态仿真方法,进一步加深对课程内容的理解。 2.实验项目 信号的分解与合成,观察Gibbs现象。 信号与系统的时域分析,即卷积分、卷积和的运算与仿真。 信号的频谱分析,观察信号的频谱波形。 系统函数的形式转换。 用Simulink平台对系统进行建模和动态仿真。 3.实验内容及结果 3.1以周期为T,脉冲宽度为2T1的周期性矩形脉冲为例研究Gibbs现象。 已知周期方波信号的相关参数为:x(t)=∑ak*exp(jkω),ω=2*π/T,a0=2*T1/T,ak=sin(kωT1)/kπ。画出x(t)的波形图(分别取m=1,3,7,19,79,T=4T1),观察Gibbs现象。 m=1; T1=4; T=4*T1;k=-m:m; w0=2*pi/T; a0=2*T1/T; ak=sin(k*w0*T1)./(k*pi); ak(m+1)=a0; t=0:0.1:40; x=ak*exp(j*k'*w0*t); plot(t,real(x)); 3.2求卷积并画图 (1)已知:x1(t)=u(t-1)-u(t-2), x2(t)=u(t-2)-u(t-3)求:y(t)=x1(t)*x2(t)并画出其波形。 t1=1:0.01:2; f1=ones(size(t1)); f1(1)=0; f1(101)=0; t2=2:0.01:3; f2=ones(size(t2)); f2(1)=0; f2(101)=0; c=conv(f1,f2)/100;
t3=3:0.01:5; subplot(311); plot(t1,f1);axis([0 6 0 2]); subplot(312); plot(t2,f2);axis([0 6 0 2]); subplot(313); plot(t3,c);axis([0 6 0 2]); (2)已知某离散系统的输入和冲击响应分别为:x[n]=[1,4,3,5,1,2,3,5], h[n]=[4,2,4,0,4,2].求系 统的零状态响应,并绘制系统的响应图。 x=[1 4 3 5 1 2 3 5]; nx=-4:3; h=[4 2 4 0 4 2]; nh=-3:2; y=conv(x,h); ny1=nx(1)+nh(1); ny2=nx(length(nx))+nh(length(nh)); ny=[ny1:ny2]; subplot(311); stem(nx,x); axis([-5 4 0 6]); ylabel('输入') subplot(312); stem(nh,h); axis([-4 3 0 5]); ylabel('冲击效应') subplot(313); stem(ny,y); axis([-9 7 0 70]); ylabel('输出'); xlabel('n'); 3.3 求频谱并画图 (1) 门函数脉冲信号x1(t)=u(t+0.5)-u(t-0.5) N=128;T=1; t=linspace(-T,T,N); x=(t>=-0.5)-(t>=0.5); dt=t(2)-t(1); f=1/dt; X=fft(x); F=X(1:N/2+1); f=f*(0:N/2)/N; plot(f,F)
重庆邮电大学移通学院学生实验报告 实验名称:熟悉设计管理和游戏界面设计 专业班级:数字媒体技术 02141401 姓名:罗钧 学号: 2014210xxx 实验日期:
实验五:熟悉设计管理和游戏界面设计 一、实验目的 (1)了解和熟悉人机界面设计过程管理的相关知识; (2)了解和评价游戏软件的人机交互设计,提高自己的评价能力,提高自己对设计水平的。 二、工具/准备工作 需要准备一台带有浏览器,能够访问因特网的计算机。 三、实验内容与步骤 1.概念理解 (1)成功的用户界面开发有4个支柱,它们能够帮助用户界面架构师将好的思想转化为成功的系统。经验表明,每个支柱都能在此过程中产生数量级的加速作用,并能促进建立优秀的系统。 请简单描述这4个支柱。 用户界面需求:软件项目的成败经常取决于所有用户和实现者之间理解的精确性和完整性。如果没有适当的需求定义,那就既不能确定正在解决什么问题,也不会知道何时能够完成。拟定用户界面需求是整个需求开发和管理过程的一部分,系统需求(硬件、软件、系统性能及可靠性等)必须清楚的加以陈述,任何处理用户界面的需求(输入/输出设备、功能、界面及用户范围等)都必须指明并达成共识。一个确定用户需求的成功方法是通过用户观察,监视正在行动的真实用户的背景和环境。 指南文档和过程:指南文档应考虑以下几方面。 1.词、图标和图形 2.屏幕布局问题 3.输入与输出设备 4.动作序列 5.培训 用户界面软件工具:设计交互系统的困难之一,是客户和用户可能对新系统并没有一个清晰的想法。由于在很多情况下交互系统都是新奇的,用户可能认识不到设计决策的用意。虽然打印出来的文稿对初步体验是有帮助的,但具有活动键盘和鼠标的屏幕展示却更为真实。菜单系统的原型可能用一两条活动路径来代替为最终系统预想的数千条路径。 专家评审和可用性测试:现在,网站的设计人员认识到,在将系统交付给客户使用之前,必须对组件进行很多小的和一些大的初步试验。除了各种专家评审方法外,与目标用户一起进行的测试、调查和自动化分析工具被证明是有价值的。其过程依可用性研究的目标、预期用户数量、错误和危害程度和投资规模而变化很大。 (2)请简单描述用户界面设计所涉及的法律问题 ①隐私问题 ②安全性和可靠性
一、实验目的 1、通过实验对自控仪表和控制元器件有一具体认识。 2、了解自控原理,锻炼动手能力。学习并安装不同的温度自控电路。 3、通过对不同电路的调试和数据测量,初步掌握仪表自控技术。 4、要求按流程组装实验电路,并测量加热反应釜温度随加热时间的变化。 5、要求待反应釜加热腔温度稳定后测量加热釜轴向温度分布规律。 二、实验原理 仪表自动控制在现代化工业生产中是极其重要的,它减少大量手工操作,使操作人员避免恶劣、危险环境,自动快速完成重复工作,提高测量精度,完成远程传输数据。本实验就是仪表自动控制在化工生产和实验中非常重要的一个分支——温度的仪表自动控制。 图-1所示是本实验整套装置图。按图由导线连接好装置,首先设置“人工智能控制仪”的最终温度,输出端输出直流电压用于控制“SSR”(固态继电器),则当加热釜温度未达到最终温度时“SSR”是通的状态,电路导通,给加热釜持续加热;当加热釜温度达到最终温度后“SSR”是不通的状态,电路断开,加热釜加热停止。本实验研究的数据对象有两个:其一,测量仪表在加热釜开始加热后测量的升温过程,即温度随时间变化;其二,当温度达到最终温度并且稳定后,测量温度沿加热釜轴向的分布,即稳定温度随空间分布。 图-1 实验装置图
1、控温仪表,2测温仪表,3和4、测温元件(热电偶),5电加热釜式反应器, 6、保险 7、电流表,8固态调压器,9、滑动电阻,10、固态继电器(SSR),11、中间继电器,12、开关 实验装置中部分仪器的工作原理: 1,控温仪表:输出端输出直流电压控制SSR,当加热釜温度未达到预设温度时SSR使电路导通,持续加热;当达到最终温度后SSR使电路断开,加热停止。 2,测温仪表:与测温的热电偶相连,实时反馈加热釜内温度的测量值。 3、4,热电偶:分别测量加热腔和反应芯内的温度。工作原理:热电阻是利用金属的电阻值随温度变化而变化的特性来进行温度测量。它是由两种不同材料的导体焊接而成。焊接的一端插入被测介质中,感受被测温度,称为热电偶的工作端或热端。另一端与导线连接,称为自由端或冷端。若将其两端焊接在一起,且两段存在温度差,则在这个闭路回路中有热电势产生。如在回路中加一直流毫伏计,可见到毫伏计中有电势指示,电势的大小与两种不同金属的材料和温度有关,与导线的长短无关。 图2 热电偶工作原理 8,RSA固态调压器原理:通过电位器手动调节以改变阻性负载上的电压,来达到调节输出功率的目的(相当于一个滑动变阻器)。输出端接加热回路,输入端接控温仪表。 10,SSR 固态继电器工作原理:固态继电器是一种无触点通断电子开关,为四端有源器件。其中两个端子为输入控制端,另外两端为输出受控端。在输入端加上直流或脉冲信号,输出端就能从关断状态转变成导通状态(无信号时呈阻断状态),从而控制较大负载。可实现相当于常用的机械式电磁继电器一样的功能
实验一典型环节的动态特性 一.实验目的 1.通过观察典型环节在单位阶跃信号作用下的相应曲线,熟悉它们的动态特性。 2.了解各典型环节中参数变化对其动态特性的影响。 二.实验内容 1.比例环节 G(S)= K 所选的几个不同参数值分别为K1= 33 ; K2= 34 ; K3= 35 ; 对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值): 2.积分环节
G(S)= S T i 1 所选的几个不同参数值分别为T i1= 33 ; T i2= 33 ; T i3= 35 : 对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值): 3.一阶惯性环节 G(S)= S T K c 1 令K不变(取K= 33 ),改变T c取值:T c1= 12 ;T c2= 14 ;T c3= 16 ;
对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值): 4. 实际微分环节 G(S)= S T S T K D D D 1 令K D 不变(取K D = 33 ),改变T D 取值:T D 1= 10 ;T D 2= 12 ;T D 3= 14 ;
对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值): 5.纯迟延环节 G(S)= S eτ- 所选的几个不同参数值分别为τ1= 2 ;τ2= 5 ;τ3= 8 ; 对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值):
6. 典型二阶环节 G(S)= 2 2 2n n n S S K ωξωω++ 令K 不变(取K = 33 ) ① 令ωn = 1 ,ξ取不同值:ξ1=0;ξ2= 0.2 ,ξ3= 0.4 (0<ξ<1);ξ4=1;ξ5= 3 (ξ≥1); 对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值): ②令ξ=0,ωn 取不同值:ωn 1= 1 ;ωn 2= 2 ; 对应的单位阶跃响应曲线(在输出曲线上标明对应的有关参数值):
测试装置动态特性仿真实验 班级:7391 学号:2009301828 姓名:张志鹏 一、实验目的 1、加深对一阶测量装置和二阶测量装置的幅频特性与相频特性的理解; 2、加深理解时间常数变化对一阶系统动态特性影响; 3、加深理解频率比和阻尼比变化对二阶系统动态特性影响; 4、使学生了解允许的测量误差与最优阻尼比的关系。 二、实验原理 1、 一阶测量装置动态特性 一阶测量装置是它的输入和输出关系可用一阶微分方程描述。一阶测量装置的频率响应函数为: 式中:S S 为测量装置的静态灵敏度;τ为测量装置的时间常数。 一阶测量装置的幅频特性和相频特性分别为: 可知,在规定S S =1的条件下,A (ω)就是测量装置的动态灵敏度。 当给定一个一阶测量装置,若时间常数τ确定,如果规定一个允许的幅值误差ε,则允许测量的信号最高频率ωH 也相应地确定。 为了恰当的选择一阶测量装置,必须首先对被测信号的幅值变化范围和频率成分有个初步了解。有根据地选择测量装置的时间常数τ,以保证A (ω)≥1-ε 能够满足。 2、二阶测量装置动态特性 二阶测量装置的幅频特性与相频特性如下: 幅频特性202220)/(4))/(1(/1)(ωωξωωω--=A 相频特性2200))/(1/()/(2()(ωωωωξφ--=arctg w Α(ω)是ξ和ω/0ω的函数,即具有不同的阻尼比ξ的测试装置当输入信??????ωτ+ωτ-ωτ+=ωτ+=ω22s s )(1j ) (11S j 11S )j (H ()()2 11 A ωτ+=ω()ωτ -=ωφarctan
号频率相同时,应具有不同的幅值响应,反之,当不同的频率的简谐信号送入同一测试装置时它们的幅值响应也不相同,同理具有不同的阻尼比ξ的测试装置当输入信号频率相同时,应有不同的相位差。 (1).当ω=0时,Α(ω)=1;(2).当ω→∞,A (ω)=0;(3).当ξ≥0.707时随着输入信号频率的加大,Α(ω)单调的下降, ξ<0.707时Α(ω)的特性曲线上出现峰值点;(4)如果ξ=0,))/(1/(1))/(1(/1)(202 20ωωωωω-=-=A ,显然,其峰值点出现在ω=0ω处。其值为“∞”,当ξ从0向0.707变化过程中随着的加大其峰值点逐渐左移,并不断减小。 对以上二阶环节的幅频特性的结论论证如下: (1).当ω=0时A(ω)=1 (2).当ω→∞时,A(ω)=0 (3).要想得到A(ω)的峰值就要使202220)/(4))/(1(/1)(A ωωξ-ωω-=ω 中的202220)/(4))/(1(ωωξωω--取最小值。 令:t=20)/(ωω t t t f 224)1()(ξ+-= 对其求导可得t=1-22ξ时,f(t)取最小值.由于t=20)/(ωω≥0,所以1-22ξ≥0, 2ξ必须小于1/2时,f(t)才有最小值,即ξ>2/2时,A(ω)不出现峰值点;当ξ<2/2时4244)(ξξ-=t f ,f(t)对ξ求导得)21(82ξξ-,可以看出f(t): ξ属于[0, 2/2]时单调递增,于是得A(ω)的峰值点A 为4244/1)(/1ξξ-=t f ; 在ξ属于[0,2/2]递减。 (4).当ξ=0时 A=∞,t=20)/(ωω,ω/0ω=1,即ξ=0时A(ω)的峰值为∞,且必出现在ω/0ω=1时,当ξ=2/2时,t=0→ω=0,A(ω)=1. 还可以看出,在ξ属于[0,2/2]增大时t=1-22ξ就减小,即f(t)的峰值左平移。 (二)阻尼比的优化 在测量系统中,无论是一阶还是二阶系统的幅频特性都不能满足将信号中的所有频率都成比例的放大。于是希望测量装置的幅频特性在一段尽可能宽的范围内最接近于1。根据给定的测量误差,来选择最优的阻尼比。
自动检测技术实验报告 实验一 金属箔式应变片性能实验 ——单臂、半桥、全桥电路性能比较 一、实验目的: 1. 观察了解箔式应变片的结构及粘贴方式。 2. 测试应变梁形变的应变输出。 3. 比较各种桥路的性能(灵敏度)。 二、实验原理: 应变片是最常用的测力传感元件,当用应变片测试时,应变片要牢固地粘贴在测试体表面,当测件受力发生形变, 应变片的敏感栅随同变形,其电阻值也随之发生相应的变化。通过测量电路,转换成电信号输出显示。 电桥电路是最常见的非电量电测电路中的一种,当电桥平衡时,桥路对臂电阻乘积相等,电桥输出为零,在桥臂四个电阻R 1、R 2、R 3、R 4中,电阻的相对变化率分别为44332211 R R R R R R R R ????、、、,当使用一个应变片时, ∑? = R R ;当二个应变片组成差动状态工作,则有 ∑?= R R R 2;用四个应变片组成二个差动对工作,且 ∑?= ====R R R R R R R R 4,4321。根据戴维南定理可以得出测试电桥的输出电压近似等于1/4 ? E ?ΣR ,电 桥灵敏度R R V K u //?=,于是对应于单臂、半桥、全桥的电压灵敏度分别为1/4E 、1/2E 和E 。由此可知,当E 和 电阻相对变化一定时,电桥及电压灵敏度与各桥臂阻值的大小无关,单臂、半桥、全桥电路的灵敏度依次增大。
U-X关系曲线图 三、实验所需部件: 直流稳压电源(V 4 档)、电桥、差动放大器、金属箔式应变片、测微头、电压表。 四、实验接线图: 图(1) 五、实验步骤: 1、调零。开启仪器电源,差动放大器增益置100倍(顺时针方向旋到底),“+,-”输入端用实验线对地短路。输出端接数字电压表,用“调零”电位器调整差动放大器输出电压为零,然后拔掉实验线。调零后电位器位置不要变化。 如需使用毫伏表,则将毫伏表输入端对地短路,调整“调零”电位器,使指针居“零”位。拔掉短路线,指针有偏转是有源指针式电压表输入端悬空时的正常情况。调零后关闭仪器电源。 2、按图(1)将实验部件用实验线连接成测试桥路,单臂桥路中R 2、R 3、R 4和W D 为电桥中的固定电阻和直流调平衡电位器,R 1为应变片(可任选上、下梁中的一片工作片)。直流激励电源为±4V ;半桥桥路中R 1和R 2为箔式应变片,R 3、R 4仍为固定电阻;全桥桥路中R 1、R 2、R 3、R 4全部使用箔式应变片。在接半桥、全桥桥路时应特别注意其应变片的受力方向,一定要接成差动形式。 3、调节测微头,使悬臂梁处于基本水平状态。 4、确认接线无误后开启仪器电源,并预热数分钟。 5、调整电桥电位器W D ,使测试系统输出为零。 6、旋动测微头,带动悬臂梁分别作向上和向下的运动,以水平状态下输出电压为零,向上和向下移动各5mm ,测微头每移动0.5mm 记录一个差动放大器输出电压值,并列表。根据表中所测数据计算灵敏度S ,S = △V /△X ,并在一个坐标图上做出V-X 关系曲线。比较三种桥路的灵敏度,并作出定性的结论。 六、实验数据分析: 实验所得数据如下表所示: 位移mm 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 电压V (单臂) -0.006 -0.011 -0.016 -0.030 -0.038 -0.043 -0.050 -0.060 -0.069 -0.076 电压V (半桥) -0.015 -0.030 -0.044 -0.060 -0.072 -0.090 -0.102 -0.118 -0.136 -0.152 电压V (全桥) -0.029 -0.063 -0.093 -0.118 -0.150 -0.182 -0.213 -0.247 -0.282 -0.310 位移mm -0.5 -1.0 -1.5 -2.0 -2.5 -3.0 -3.5 -4.0 -4.5 -5.0 电压V (单臂) 0.014 0.019 0.026 0.033 0.045 0.052 0.060 0.066 0.076 0.085 电压V (半臂) 0.019 0.034 0.050 0.065 0.080 0.102 0.120 0.138 0.155 0.175 电压V (全桥) 0.033 0.066 0.098 0.136 0.170 0.198 0.230 0.261 0.293 0.325 根据表中所测数据,在一个坐标图上做出V-X 关系曲线图,如下图: v W D +4V -4V R 3 R 2 R 1 R 4
EDA设计课程实验报告 实验题目:数码管动态显示实验 学院名称: 专业:电子信息工程 班级: 姓名:高胜学号 小组成员: 指导教师: 一、实验目的 学习动态扫描显示的原理;利用数码管动态扫描显示的原理编写程序,实现自己的学号的显示。 二、设计任务及要求
1、在SmartSOPC实验箱上完成数码管动态显示自己学号的后八个数字。 2、放慢扫描速度演示动态显示的原理过程。 三、系统设计 1、整体设计方案 数码管的八个段a,b,c,d,e,f,g,h(h是小数点)都分别连接到SEG0~SEG7,8个数码管分别由八个选通信号DIG0~DIG7来选择,被选通的数码管显示数据,其余关闭。如果希望8个数码管显示希望的数据,就必须使得8个选通信号DIG0~DIG7分别被单独选通,并在此同时,在段信号输入口SEG0~SEG7加上该对应数码管上显示的数据,于是随着选通信号的扫描就能实现动态扫描显示的目的。虽然每次只有1个数码管显示,但只要扫描显示速率足够快,利用人眼的视觉余辉效应,我们仍会感觉所有的数码管都在同时显示。 2、功能模块电路设 (1)输入输出模块框图(见图1) 图1 (2)模块逻辑表达(见表1) 表1(数码管显示真值表) clk_1k dig seg ↑01111111 C0 ↑10111111 F9
注:数码管显示为01180121 (3)算法流程图(见图2) (4)Verilog源代码 module scan_led(clk_1k,d,dig,seg); //模块名scan_led input clk_1k; //输入时钟 input[31:0] d; //输入要显示的数据output[7:0] dig; //数码管选择输出引脚
大学物理仿真实验报告一一塞曼效应 一、实验简介 塞曼效应是物理学史上一个著名的实验。荷兰物理学家塞曼(Zeeman)在1896年发现把产生光谱的光源置于足够强的磁场中,磁场作用于发光体,使光谱发生变化,一条谱线即会分裂成几条偏振化的谱线,这种现象称为塞曼效应。 塞曼效应是法拉第磁致旋光效应之后发现的又一个磁光效应。这个现象的发现是对光的 电磁理论的有力支持,证实了原子具有磁矩和空间取向量子化,使人们对物质光谱、原子、分子有更多了解。 塞曼效应另一引人注目的发现是由谱线的变化来确定离子的荷质比的大小、符号。根据 洛仑兹(H.A?Lorentz)的电子论,测得光谱的波长,谱线的增宽及外加磁场强度,即可称得离子的荷质比。由塞曼效应和洛仑兹的电子论计算得到的这个结果极为重要,因为它发表在J、 J汤姆逊(J、J ThomSOn)宣布电子发现之前几个月,J、J汤姆逊正是借助于塞曼效应由洛仑 兹的理论算得的荷质比,与他自己所测得的阴极射线的荷质比进行比较具有相同的数量级,从而得到确实的证据,证明电子的存在。 塞曼效应被誉为继X射线之后物理学最重要的发现之一。 1902年,塞曼与洛仑兹因这一发现共同获得了诺贝尔物理学奖(以表彰他们研究磁场对光的效应所作的特殊贡献)。至今,塞曼效应依然是研究原子内部能级结构的重要方法。 本实验通过观察并拍摄Hg(546.1 nm)谱线在磁场中的分裂情况,研究塞曼分裂谱的特征,学习应用塞曼效应测量电子的荷质比和研究原子能级结构的方法。 二、实验目的 1?学习观察塞曼效应的方法观察汞灯发出谱线的塞曼分裂; 2?观察分裂谱线的偏振情况以及裂距与磁场强度的关系; 3?利用塞曼分裂的裂距,计算电子的荷质比 e m e数值。 三、实验原理 1、谱线在磁场中的能级分裂 设原子在无外磁场时的某个能级的能量为E0,相应的总角动量量子数、轨道量子数、 自旋量子数分别为J、L、S。当原子处于磁感应强度为B的外磁场中时,这一原子能级将 分裂为2J 1层。各层能量为 E = E o MgJ B B(1) 其中M为磁量子数,它的取值为J , J -1 ,…,-J共2J 1个;g为朗德因子;J B为 hc 玻尔磁矩(A B= );B为磁感应强度。 4兀m 对于L-S耦合
中北大学软件学院 实验报告 专业软件工程 课程名称人机交互 学号 姓名 辅导教师何志英成绩 实验日期2012/3/13实验时间19:00-22:00
1实验名称 试验一:最新人机交互技术 2、实验目的 了解最新人机交互的研究内容 3、实验内容 通过网络查询最新人机交互相关知识。 (1)在百度中找到“最新人机交互视频”的相关网页,查看视频。 (2)什么是Kinect技术。 (3)人机交互技术在各个领域的应用。 4、测试及结果 (1)已在百度中查看“最新人机交互视频”的相关网页。 (2)Kinect是微软在2010年6月14日对XBOX360体感周边外设正式发布的名字。 (3)人机交互技术已成为解决医疗、教育、科研、环保等各类重大社会问题不可或缺的重要工具 5、心得 通过此实验,我了解人机交互技术在社会各个行业的重大作用。辅导教师何志英成绩 实验日期2012/3/13实验时间19:00-22:00 1、实验名称 实验二:立体视觉 2、实验目的 掌握立体视觉的原理
3、实验要求 通过网络查询立体视觉相关知识。 (1)在虚拟环境是如何实现立体视觉? (2)3D和4D电影的工作原理。 4、测试及结果 (1)实物虚化的视觉跟踪技术使用从视频摄像机到x-y平面阵列,周围光或者跟踪光在图像投影平面不同时刻和不同位置上的投影,计算被跟踪对象的位置和方向。 视点感应必须与显示技术相结合,采用多种定位方法(眼罩定位、头盔显示、遥视技术和基于眼肌的感应技术)可确定用户在某一时刻的视线。例如将视点检测和感应技术集成到头盔显示系统中,飞行员仅靠“注视”就可在某些非常时期操纵虚拟开关或进行飞行控制 (2) 4D电影是在3D立体电影的基础上加环境特效模拟仿真而组成的新型影视产品。所谓4D电影,也叫四维电影;即三维的立体电影和周围环境模拟组成四维环境。观众在看立体电影时,顺着影视内容的变化,可实时感受到风暴、雷电、下雨、撞击、喷洒水雾、拍腿等身边所发生与立体影象对应的事件,4D的座椅是具有喷水、喷气、振动、扫腿等功能的,以气动为动力的。环境模拟仿真是指影院内安装有下雪、下雨、闪电、烟雾等特效设备,营造一种与影片内容相一致的环境。 5、心得 通过本次试验,我明白了立体视觉以及3D、4D电影的工作原理。
数控技术实验报告 学院 班级 学号 姓名 成绩 井冈山大学机械系 2010年03月
注意事项 数控操作实验是数控技术课程的组成部分之一,对于培养学生理论联系实际和实际动手能力具有极其重要的作用。因此,要求每个学生做到: 一、每次实验前要认真预习,并在实验报告上填写好实验目的和所用 实验设备; 二、实验前,每人必须配合实验指导老师在实验室记录本上做好相关 记录; 三、实验中要遵守实验规则,爱护实验设备,仔细观察实验现象,认 真记录实验数据; 四、在实验结束离开实验室前,必须认真仔细清点整理实验仪器和实 验设备,经实验指导教师检查后后方可离开实验室; 五、实验结束后,要及时对实验数据进行整理、计算和分析,填写好 实验报告,并上交授课教师批阅。
实验一数控车床的认识 实验日期2010 年04 月10 日 同组成员指导教师(签字) 一、实验目的 1.了解数控车削加工工件坐标的设定方法; 2.掌握数控车床操作面板上常用按键的功能; 3.掌握数控车床的基本操作方法。 二、实验设备(规格、型号) 1.CAK3675V数控车床; 2.CAK3275V数控车床; 3.Fanuc 0i-mate TC数控系统。 三、实验记录及数据处理 1. 熟悉Fanuc 0i前置刀架数控车床的操作面板,依次解释、、、、、、、、、、、、、、、、、、、、、、、、、、、等的功能。
2.数控车削加工工件坐标系设定方法有哪些?并作简述说明。 答:数控车床设置工件坐标系的方法有三种: (1)使用刀具偏执功能设置工件原点,即直接使用Txxxx指令建立工件原点; (2)使用G50指令建立工件原点,其格式为G50X_Z_; (3)使用G54~G59中的一个指令设定工件原点,其编程格式为:G54/G55/G56/G57/G58/G59。 3.数控车床为什么要回零?回零顺序是? 答:回零的原因: 目前,大多数数控机床均采用增量式位置检测装置来做位置环反馈元件,当机床在断电状态时NC系统会失去对机床坐标系值的记忆,因此每次机床重新通电之初,必须手动操作返回机床参考点一次,恢复记忆,以便进行自动加工。 对于前置刀架的数控车床来说,为了防止刀具与尾座套筒的碰撞,回零时应该注意先对X轴回零,再对Z轴回零。
微机原理与接口技术 实验报告 实验题目:动态数码显示设计 指导老师: 班级:计算机科学与技术系 姓名: 2014年 12月3日
实验十三动态数码显示设计 一、实验目的 1.掌握动态数码显示技术的设计方法。 2.掌握扫描在程序设计中的应用。 二、设计原理 如图13.1所示,在单片机的P1端口接动态数码管的字形码笔段,在单片机的P2端口接动态数码管的数位选择端。在单片机P3.0管脚处接一个开关,当开关连接高电平时,态数码管上显示“12345”字样;当开关连接低电平时,态数码管上显示“HELLO”字样。 三、参考电路 图13.1 动态数码显示电路原理图
四、电路硬件说明 (1)在“单片机系统”区域中,把单片机的P1.0-P1.7端口连接到“动态数码显示”区域中的a-h端口上。 (2)在“单片机系统”区域中,把单片机的P2.0-P2.7端口通过8联拨动拨码开关JP1连接到“动态数码显示”区域中的S1-S8端口上。 (3)在“单片机系统”区域中,把单片机的P3.0端口通过8联拨动拨码开关JP2连接到拨动开关区域中的SW1端口上。 五、程序设计内容 (1)动态扫描方法: 动态接口采用各数码管循环轮流显示的方法,当循环显示频率较高时,利用人眼的暂留特性,看不出显示的闪烁现象,这种显示需要一个接口完成字形码的输出(字形选择),另一接口完成各数码管的轮流点亮(数位选择)。 (2)在进行数码显示的时候,要对显示单元开辟8个显示缓冲区,在每个显示缓冲区装有显示的不同数据即可。 (3)对于显示不同字形码的数据采用查表方法来完成。 六、程序流程图 (如图13.2所示) 图13.2 动态数码显示程序流程图
《物流仿真实验》 实验报告书 实验报告题目: 物流仿真实验学院名称: 管理学院 专业: 物流管理 班级: 物流1303 姓名: 孟颖颖 学号: 2 成绩: 2016年7月 实验报告 一、实验名称 物流仿真实验 二、实验要求 ⑴根据模型描述与模型数据对配送中心进行建模;
⑵分析仿真实验结果,进行利润分析,找出利润最大化的策略。 三、实验目的 1、掌握仿真软件Flexsim的操作与应用,熟悉通过软件进行物流仿真建模。 2、记录Flexsim软件仿真模拟的过程,得出仿真的结果。 3、总结Flexsim仿真软件学习过程中的感受与收获。 三、实验设备 (1)硬件及其网络环境 服务器一台:PII400/10、3G/128M以上配置、客户机100台、局域网或广域网。 (2)软件及其运行环境 Flexsim,Windows 2000 Server、SQL Server 7、0以上版本、IIS 5、0、SQL Server 数据库自动配置、IIS 虚拟目录自动配置 四、实验步骤 1 概念模型 1个Sink到操作区,如图:
第二步:连接端口 根据配送流程,对模型进行适宜的连接,所有端口连接均用A连接,如图: 第三步:Source的参数设置 为使Source产生实体不影响后面Processor的生产,尽可能的将时间间隔设置尽可能的小,并对三个Source做出同样的设定。 打开Source参数设置窗口,将时间到达间隔设置为常数1,同时为对三个实体进行区别,进行设置产品颜色,点击触发器,打开离开触发的下拉菜单,点击设置临时实体类型,设置不同实体类型,颜色自然发生变化。并对另外两个Source 进行同样的设置,如图:
动态法测量杨氏模量 一、 实验目的 1. 理解动态法测量杨氏模量的基本原理。 2. 掌握动态法测量杨氏模量的基本方法,学会用动态法测量杨氏模量。 3. 了解压电陶瓷换能器的功能,熟悉信号源和示波器的使用。学会用示波器观察判断样品共振的方法。 4. 培养综合运用知识和使用常用实验仪器的能力。 二、 实验原理: 在一定条件下,试样振动的固有频率取决于它的几何形状、尺寸、质量以及它的杨氏模量。如果在实验中测出试样在不同温度下的固有频率,就可以计算出试样在不同温度下的杨氏模量。 根据杆的横振动方程式 02 244=??+??t y EJ S x y ρ (1) 式中ρ为杆的密度,S 为杆的截面积,?= s dS y J 2 称为惯量矩(取决于截面的形状),E 即为杨氏模量。 如图1所示,长度L 远远大于直径d (L >>d )的一细长棒,作微小横振动(弯曲振动)时满足的动力学方程(横振动方程)为 02244=??+??t EJ y S x y ρ (1) 棒的轴线沿x 方向,式中y 为棒上距左端x 处截面的y 方向位 移,E 为杨氏模量,单位为Pa 或N/m 2;ρ为材料密度;S 为 截面积;J 为某一截面的转动惯量,??=s ds y J 2。 横振动方程的边界条件为:棒的两端(x =0、L )是自由端,端点既不受正应力也不受切向力。用分离变量法求解方程(1),令)()(),(t T x X t x y =,则有 2 24411dt T d T EJ S dx X d X ?-=ρ (2) 由于等式两边分别是两个变量x 和t 的函数,所以只有当等式两边都等于同一个常数时等式才成立。假设此常数为K 4,则可得到下列两个方程 044 4=-X K dx X d (3) 0422=+T S EJ K dt T d ρ (4) 如果棒中每点都作简谐振动,则上述两方程的通解分别为 图1 细长棒的弯曲振动
XXXXX 实验报告 学院(部)XX学院 课程名称生产系统仿真实验 学生姓名 学号 专业 2012年9月10日
《生产系统仿真》实验报告 年月日 学院年级、专业、班实验时间9月10日成绩 课程名称生产系统仿真 实训项目 名称 系统仿真软件的基础应 用 指导 教师 一、实验目的 通过对Flesim软件进一步的学习,建立模型,运用Flesim软件仿真该系统,观察并分析运行结果,找出所建模型的问题并进行改进,再次运行循环往复,直到找出构建该系统更为合理的模型。 二、实验内容 1、建立生产模型。 该模型生产三种产品,产品到达速率服从均值为20、方差为2的正态分布;暂存器的最大容量为25个;检测器的检测时间服从均值为30的指数分布,预制时间为10s;传送带的传送速率为1m/s,带上可容纳的最大货件数为10个。 2、运行生产模型。 3、对运行结果进行分析,提出改进方案在运行,直到找到更为合理的模型。 三、实验报告主要内容 1、根据已有数据建立生产模型。 将生产系统中所需实体按组装流程进行有序的排列,并进行连接如图1所示
图1 2、分别对发生器、暂存器、检验台和传送带进行参数设置。 (1)发生器的产品到达速率服从均值为20、方差为2的正态分布。如图2所示。 (2)暂存器的最大容量设置为25件。如图3所示。 (3)设置检验台的检测时间服从均值为30s的指数分布,预制时间为10s.如图4所示。 (4)传送带的传送速率为1m/s,最大容量为10件。如图5所示 图2 图3 图4 图5 3、对发生器及暂存器进一步设置。 (1)发生器在生成产品时设置三种不同类型的产品,通过颜色区分。如图6所示。 (2)暂存器在输出端口通过设置特定函数以使不同颜色的产品在不同的检验台检验。如图7所示。
综合实验报告 实验名称自动控制系统综合实验 题目 指导教师 设计起止日期2013年1月7日~1月18日 系别自动化学院控制工程系 专业自动化 学生姓名 班级 学号 成绩
前言 自动控制系统综合实验是在完成了自控理论,检测技术与仪表,过程控制系统等课程后的一次综合训练。要求同学在给定的时间内利用前期学过的知识和技术在过程控制实验室的现有设备上,基于mcgs组态软件或step7、wincc组态软件设计一个监控系统,完成相应参数的控制。在设计工作中,学会查阅资料、设计、调试、分析、撰写报告等,达到综合能力培养的目的。
目录 前言 (2) 第一章、设计题目 (4) 第二章、系统概述 (5) 第一节、实验装置的组成 (5) 第二节、MCGS组态软件 (11) 第三章、系统软件设计 (14) 实时数据库 (14) 设备窗口 (16) 运行策略 (19) 用户窗口 (21) 主控窗口 (30) 第四章、系统在线仿真调试 (32) 第五章、课程设计总结 (38) 第六章、附录 (39) 附录一、宇光智能仪表通讯规则 (39)
第一章、设计题目 题目1 单容水箱液位定值控制系统 选择上小水箱、上大水箱或下水箱作为被测对象,实现对其液位的定值控制。 实验所需设备:THPCA T-2型现场总线控制系统实验装置(常规仪表侧),水箱装置,AT-1挂件,智能仪表,485通信线缆一根(或者如果用数据采集卡做,AT-4 挂件,AT-1挂件、PCL通讯线一根)。 实验所需软件:MCGS组态软件 要求: 1.用MCGS软件设计开发,包括用户界面组态、设备组态、数据库组态、策略组态等,连接电路, 实现单容水箱的液位定值控制; 2.施加扰动后,经过一段调节时间,液位应仍稳定在原设定值; 3.改变设定值,经过一段调节时间,液位应稳定在新的设定值。
实验三 LCD1602液晶显示实验 姓名专业学号成绩 一、实验目的 1.掌握Keil C51软件与proteus软件联合仿真调试的方法; 2.掌握LCD1602液晶模块显示西文的原理及使用方法; 3.掌握用8位数据模式驱动LCM1602液晶的C语言编程方法; 4.掌握用LCM1602液晶模块显示数字的C语言编程方法。 二、实验仪器与设备 1.微机一台 C51集成开发环境仿真软件 三、实验内容 1.用Proteus设计一LCD1602液晶显示接口电路。要求利用P0口接LCD1602 液晶的数据端,~做LCD1602液晶的控制信号输入端。~口扩展3个功能键 K1~K3。参考电路见后面。 2.编写程序,实现字符的静态和动态显示。显示字符为 第一行:“1.姓名全拼”,第二行:“2.专业全拼+学号”。 3.编写程序,利用功能键实现字符的垂直滚动和水平滚动等效果显示。显示字 符为:
“1.姓名全拼 2.专业全拼+学号 EXP8 DISPLAY ” 主程序静态显示“My information!” 四、实验原理 液晶显示的原理:采用的LCD显示屏都是由不同部分组成的分层结构,位于最后面的一层是由荧光物质组成的可以发射光线的背光层,背光层发出的光线在穿过第一层偏振过滤层之后进入包含成千上万水晶液滴的液晶层,液晶层中的水晶液滴都被包含在细小的单元格结构中,一个或多个单元格构成屏幕上的一个像素。当LCD中的电极产生电场时,液晶分子就会产生扭曲,从而将穿越其中的光线进行有规则的折射,然后经过第二层过滤层的过滤在屏幕上显示出来。 1.LCD1602采用标准的14引脚(无背光)或16引脚(带背光)接口,各引脚 接口说明如表:
《计算机仿真》上机实验报告 姓名: 学号: 2012104021 专业:测控 班级: 12级
实验一常微分方程的求解及系统数学模型的转换一.实验目的 通过实验熟悉计算机仿真中常用到的Matlab指令的使用方法,掌握常微分方程求解指令和模型表示及转换指令,为进一步从事有关仿真设计和研究工作打下基础。 二. 实验设备 个人计算机,Matlab软件。 三. 实验准备 预习本实验有关内容(如教材第2、3、5章中的相应指令说明和例题),编写本次仿真练习题的相应程序。 四. 实验内容 1. Matlab中常微分方程求解指令的使用 题目一:请用MATLAB的ODE45算法分别求解下列二个方程。要求:1.编写出Matlab 仿真程序;2.画出方程解的图形并对图形进行简要分析;3.分析下列二个方程的关系。 1.2. 1.function fun=funl(t,x) fun=-x^2;
[t,x]=ode45('fun1',[0,20],[1]); figure(1);plot(t,x); grid 2.function fun=fun2(t,x) fun=x^2; [t,x]=ode45('fun2',[0,20],[-1]); figure(2);plot(t,x); grid
题目二:下面方程组用在人口动力学中,可以表达为单一化的捕食者-被捕食者模式(例如,狐狸和兔子)。其中1x 表示被捕食者, 2x 表示捕食者。如果被捕食者有无限的食物,并且不会出现捕食者。于是有1'1x x ,则这个式子是以指数形式增长的。大量的被捕食者将会使捕食者的数量增长;同样,越来越少的捕食者会使被捕食者的数量增长。而且,人口数量也会增长。请分别调用ODE45、ODE23算法求解下面方程组。要求编写出Matlab 仿真程序、画出方程组解的图形并对图形进行分析和比较。 1.ODE45
电子技术实验报告 一、元器件认识 (一)、电阻 电阻元件的的标称阻值,一般按规定的系列值制造。电阻元件的误差有六级,对应的标称值系列有E192、E96、E12和E6。电阻在电路中的主要作用为分流、限流、分压、偏置等。 电阻器的标称值和误差等级一般都用数字标印在电阻器的保护漆上。但体积很小的和一些合成的电阻器其标称值和误差等级常以色环的方便之处,能清楚地看清阻值,便于装配和维修。 电阻色码图 颜色黑棕红橙黄绿蓝紫灰白金银本色对应0 1 2 3 4 5 6 7 8 9 / / / 数值 4 567890123对应/ / / 10 10 10 10 10 10 10 10 10 10 n10 方 次 表示/ +1% +2% / / +0.5% +0.25% +0.1% / / +5% +10& +20% 误差-1% -2% -0.5% -0.25% -0.1% -5% -10% -20% 值 色环表示方法有两种形式,一种是四道环表示法,另外一种是五道环表示法。 四道色环:第1,2色环表示阻值的第一、第二位有效数字,第3色环表示两位n数字再乘以10 的方次,第4色环表示阻值的误差。五道色环:第1,2,3色环
n表示阻值的3位数字,第4色环表示3位数字再乘以10的方次,第5色环表示阻值的误差。 ,二,电容值识别 电容在电路中一般用“C”加数字表示(如C13表示编号为13的电容).电容是由两片金属膜紧靠,中间用绝缘材料隔开而组成的元件.电容的特性主要是隔直流通交流. 电容容量的单位为皮法(pf)或(uf),大多数电容的容量值都印其外封装上,主要有两种识别方法,一种是直接识别方法,例如220UF就是220uF,4n7就是 4.7nF;另一种是指数标识,一般以数值乘以倍率表示,倍率值一般用最后 3一位数字表示,单位为pf。比如103,表示容量为10*10pf,即0.01uf;而224表示容量为22*10000pf,即0.22uf;331,表示容量为33*10pf,即330pf。误差用字母表示。“k”表示误差额为10%,“j”表示误差额为5%。而字母“R”可用于表示小数点,例如3R3=3.3 1 (三)用万用表测试半导体二极管 将一个PN结加上正负电极引线,再用外壳封装就构成半导体二极管。由P区引出的电极为正(或称阳极),由N区引出的电极为负极(或称阴极)。 (1) 鉴别二极管的正,负极电极 用万用表表测量二极管的极性电路图,黑表棒接内部电池正极,红表棒接内部电池负极。测量二极管正向极性时按“A”连接,万用表的欧姆档量程选在R*10档。若读数在几百到几百千欧以下,表明黑表棒所接的一段为二极管的正极,二极管正向导通,电阻值较小;若读数很大,则红表棒所接的一端是二极管的正极,此时二极管反向截止。二极管的基本特性是单向导电性。 (四)用万用表测试小功率晶体三极管