线性系统的可控性和可观测性
可控性和可观测性的概念
第三节介绍了系统的稳定性,本节接着介绍系统另外两个重要特性,即系统的可控性和可观测性,这两个特性是经典控制理论所没有的。在用传递函数描述的经典控制系统中,输出量一般是可控的和可以被测量的,因而不需要特别地提及可控性及可观测性的概念。现
代控制理论用状态方程和输出方程描述系统,输出和输入构成系统的外部变量,而状态为系
统的内部变量,系统就好比是一块集成电路芯片,内部结构可能十分复杂,物理量很多,而
外部只有少数几个引脚,对电路内部物理量的控制和观测都只能通过这为数不多的几个引脚进行。这就存在着系统内的所有状态是否都受输入控制和所有状态是否都可以从输出反映出来的问题,这就是可控性和可观测性问题。如果系统所有状态变量的运动都可以通过有限的控制点的输入来使其由任意的初态达到任意设定的终态,则称系统是可控的,更确切的说是
状态可控的;否则,就称系统是不完全可控的,简称为系统不可控。相应地,如果系统所有的状态变量任意形式的运动均可由有限测量点的输出完全确定出来,则称系统是可观测的,简称为系统可观测;反之,则称系统是不完全可观测的,简称为系统不可观测。
可控性与可观测性的概念,是用状态空间描述系统引伸出来的新概念,在现代控制理论
中起着重要的作用。可控性、可观测性与稳定性是现代控制系统的三大基本特性。
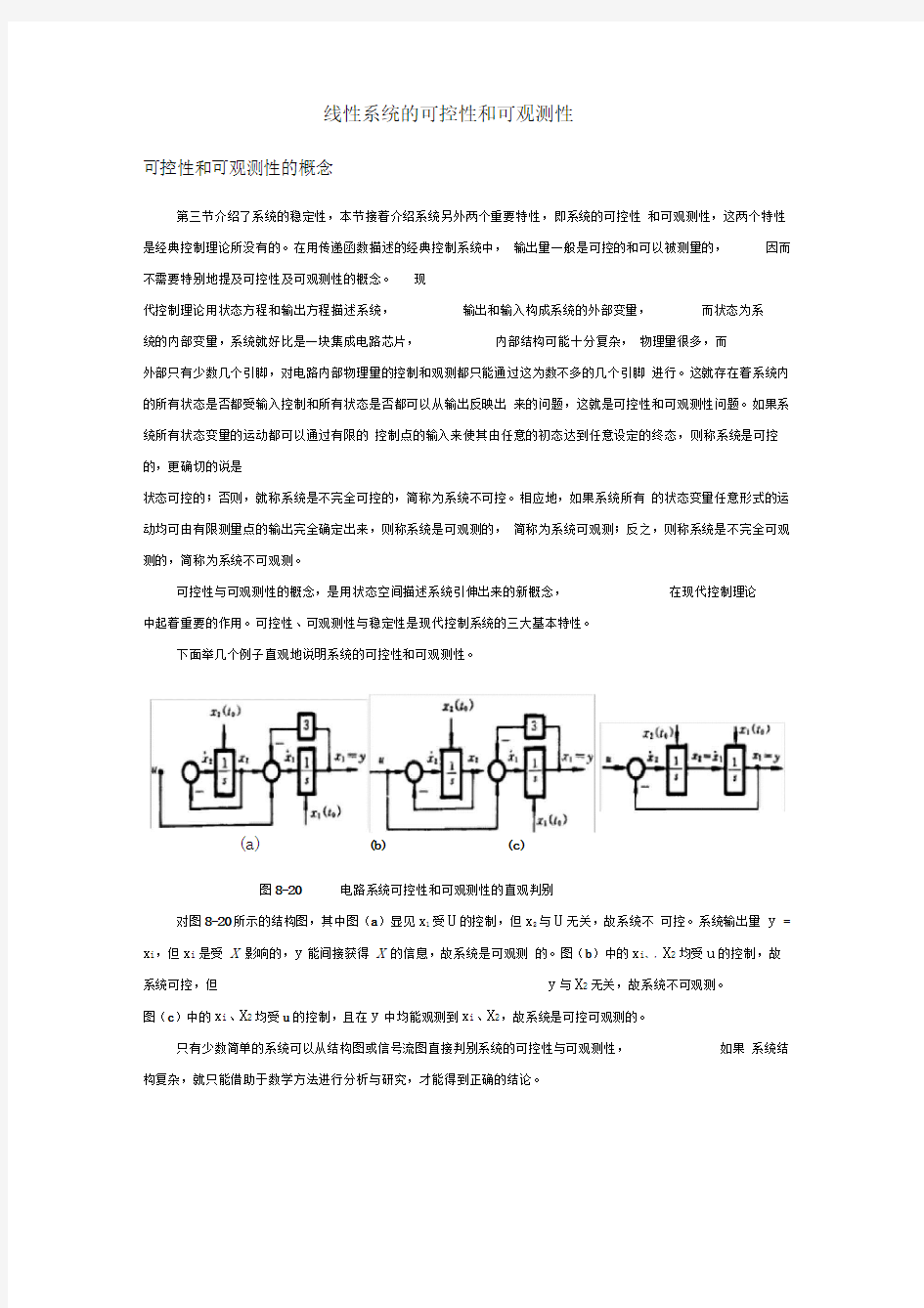
下面举几个例子直观地说明系统的可控性和可观测性。
(a) (b) (c)
图8-20 电路系统可控性和可观测性的直观判别
对图8-20所示的结构图,其中图(a)显见x1受U的控制,但x2与U无关,故系统不可控。系统输出量y = x i,但x i是受x影响的,y能间接获得x的信息,故系统是可观测的。图(b)中的x i、,X2均受u的控制,故系统可控,但y与X2无关,故系统不可观测。
图(c)中的x i、X2均受u的控制,且在y中均能观测到x i、X2,故系统是可控可观测的。
只有少数简单的系统可以从结构图或信号流图直接判别系统的可控性与可观测性,如果系统结构复杂,就只能借助于数学方法进行分析与研究,才能得到正确的结论。
8.4.2 线性定常系统的可控性
可控性分为状态可控性和输出可控性, 若不特别指明, 一般指状态可控性。 状态可控性 只与状态方程有关,与输出方程无关。下面分别对离散、连续定常系统的可控性加以研究, 先从单输入离散系统入手。
1. 离散系统的可控性
( 1)单输入离散系统的状态可控性
n 阶单输入线性定常离散系统状态可控性定义为:
在有限时间间隔内 t [0, nT],存在无约束的阶梯控制序列 u ( 0),…,u (n -1 ),能使系
统从任意初态x (0)转移至任意终态 x (n ),则称该系统状态完全可控,简称可控。
下面导出系统可控性的条件,设单输入系统状态方程为
称(n n)方阵色为单输入离散系统的可控性矩阵。式(
8-90)是一个非齐次线性方程组,
n 个方程中有n 个未知数u (o), ,u(n 1),由线性方程组解的存在定理可知,
当矩阵S i 的
秩与增广矩阵 S 1Mx(0) 的秩相等时,方程组有解(在此尚有惟一解)
,否则无解。注意到在
x 为任意的情况下,要使方程组有解的充分必要条件是:矩阵
S i 满秩,即
rank S 1 n
(8-92 )
或矩阵S i 的行列式不为零,或矩阵
S i 是非奇异的,即
detS 1 0
( 8-93 )
式( 8-92 )和式( 8-93)都称为可控性判据。
当rank S i V n 时,系统不可控,表示不存在能使任意 x(0)转移至任意 x(n)的控制。 从以上推导看出,状态可控性取决于
和g,当u(k)不受约束时,可控系统的状态转
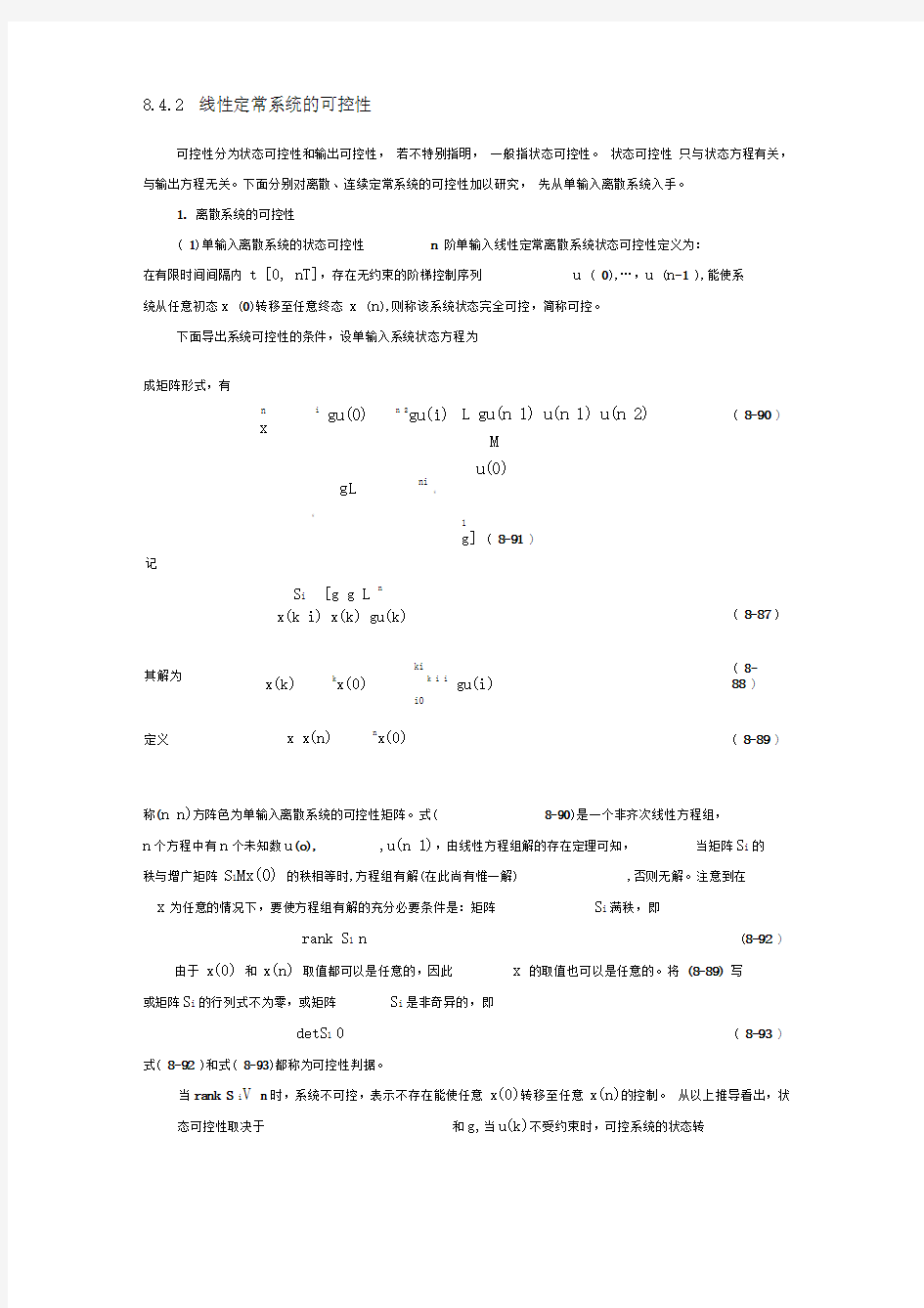
x(k i) x(k) gu(k)
( 8-87 )
其解为
ki
x(k)
k
x(0)
k i i
gu(i)
i0
( 8-88 )
定义
x x(n) n
x(0)
( 8-89 )
由于 x(0) 和 x(n) 取值都可以是任意的,因此 x 的取值也可以是任意的。将 (8-89) 写
n
x
i
gu(0)
n 2
gu(i)
g
gL
ni
g
记
S i [g g L n
L gu(n 1) u(n 1) u(n 2)
( 8-90 )
M u(0)
1
g] ( 8-91 )
成矩阵形式,有
n个采样周期。
移过程至多以n个采样周期便可以完成,有时状态转移过程还可能少于
上述过程不仅导出了单输入离散系统可控性条件,而且式(8-90 )还给出了求取控制输
入的具体方法。
(2)多输入离散系统的状态可控性
单输入离散系统可控性的方法可推广到多输入系统,设系统状态方程为
x(k 1) x(k) Gu(k) (8-94)可控性矩阵为
G G L n 1G (8-95)
u(n 1)
x G G L n 1G M (8-96)
u(0)
该阵为n np矩阵,由于列向量u(0), ,u( n 1)构成的控制列向量是np维的。式(8-96
含有n个方程和np个待求的控制量。由于x是任意的,根据解存在定理,矩阵S2的秩为n 时,方程组才有解。于是多输入线性定常散离系统状态可控的充分必要条件是
rank S2 rank[G G n 1G] n (8-97)或
detS2S:0 (8-98)S2的行数总小于列数,在列写S2时,若能知道S2的秩为n,便不必把S2的其余列都
计算和列写出来。另外,用(8-98 )计算一次n阶行列式便可确定可控性了,这比可能需要多次计算S2的n阶行列式要简单些。
多输入线性定常离散系统的状态转移过程一般可少于n个采样周期(例8-31 )。
例8-20设单输入线性定常散离系统状态方程为
1 0 0 1
x(k 1) 0 2 2 x(k) 0 u(k)
1 1 0 1
试判断可控性;若初始状态x
2 1 0T,确定使x(3)0的控制序列u(0),u(1)(0)
u(2);研究使x(2)0的可能性。
解由题意知
1 0 0 1
0 2 2 ,g 0
1 1 0 1
2
rank
rank[ g g g] = rank 0
1
故该系统可控。
按式(8-96 )求出u(0), u(1), u(2)。下面则用递推法来求控制。令 k=0, 1, 2,可得
状态
序
列
2
1 x(1)
x(0) gu(0)
2 0 u(0)
1 1
2
1 1
x(2)
x(1) gu(1) 6
2 u(0) 0 u(1)
1
1
2
1
1
1 x(3)
x(2) gu(2)
12 2 u(0)
2 u(1) 0 u(2)
4
3
1
1
1
1 1 u(0)
2
令x(3)
0,即解下列方程组
2 2 0 u(1) 12
3
1 1 u(2)
4
其系数矩阵即可控性矩阵
S ,它的非奇异性可给出如下的解 组无解,意为不能在第二个采样周期内使给定初态转移至原点。 若该两个秩相等时, 便意味
着可用两步完成状态转移。
例8-21多输入线性定常离散系统的状态方程为
x(k 1) x(k) Gu(k)
1
u(0) 1 1 1 2 u(1) 2 2 0 12 u(2)
3 1 1
4
2 1 1 2
12 4
5 11 8
若令x(2)
0,即解下列方程组
1 0 u(0) 彳 u(1) 1
容易看出其系数矩阵的秩为
2,但增广矩阵
1
1 2
2 0
6 的秩为3,两个秩不等,方程 1 1 0
2 2
1
0 0
0 2 0 ,G
0 1 14
1 0
试判断可控性,设初始状态为
[-1 , 0 ,2]
只是U 1
(0) 0,
U 2(0) 1
。但本例不能一步内使任意初态转移到原点。
2.连续系统的可控性
0 0 1 2 2
4 解
S 2 [G G 2
G]= 0 1 0 2 0 4
1 0
0 4 1
10
由前三列组成的矩阵的行列式不为零, 故该系统可控, T
,研究使x(1) 0的可能性。
定能求得控制使系统从任意初态 在三步内转移到原点。由
x(1)
x(0) Gu(0)
0,给出
x(0)
1
Gu(0)
2 1 2 3
6(0)
氏(0) 2
1 2 3
U 1(0) U 2(0) 设初始状态为
,由于 rank
2
1 2 3
=rank =2,可求得
5(0)
1此(0)
0, 在一步内使该初态转移到原点。 当初始状态为
12
3
T
亦然,
(1)单输入连续系统的状态可控性 单输入线性连续定常系统状态可控性定义为:
有限时间间隔内
t [t °,t f ],如果存在无约束的分段连续控制函数 u(t),能使系统从任意
初态x(t 0)转移至任意终态x(t f ),
设状态方程为 则称该系统是状态完全可控的,简称是可控的。
Ax bu
(8-99)
终态解为
x(t f )=e
A(t f
t o ) 〃 \
t
f
A(t f )
x(t 。) t e bu( )d
(8-100)
定义
x x(t f )
e A(t f
t 0
)
x(t o )
显然,x 的取值也是任意的。
于是有 f
e A(t
f t 0
)bu( )d (8-101)
利用凯莱-哈密顿定理的推论
m ( )A m
At f
x e t f
t
m
( )A m
bu( )d
n 1
At
f
m. e A b
t f
0 m ( )u( )d
3、最小实现 定义4.9(最小实现定义): 传递函数矩阵)(s G 的一个实现(没有相同的零、极点或相同零、极点已经对消) Cx y Bu Ax x =+= 称为最小实现。如果)(s G 中不存在其它实现 x C y u B x A x =+= 使x 的维数小于x 的维数。 定理4.11: 传递函数矩阵)(s G 的一个实现∑),,(C B A Cx y Bu Ax x =+= 为最小实现的充分必要条件是∑),,(C B A 既是可控的又是可观测的。 【例4.9.4】试求如下传递函数矩阵的最小实现。 ?? ???? ++++=)3)(2(1 ) 2)(1(1 )(s s s s s G 解:(1) ?? ? ? ?? ++++++++=?)3)(2)(1(1 ) 3)(2)(1(3 )(21s s s s s s s s s G 说 明: 设传递函数矩阵为r m s G ?)(,在求其最小实现时,先初选一种实现(可控标准型实现或可观测标准型实现)。r 为输入变量的维数,m 为输出变量的维数。 初选规则是: (1)m r >时,先初选可观测标准型实现。 (2)m r <时,先初选可控标准型实现。
[]13) 3)(2)(1(1 +++++= s s s s s [][]{}13116 1161 2 3 ++++=s s s s 即 60=a ,111=a ,62=a []13 0=β,[]111=β,[]00 2=β 由21)()(??=s G s G r m ,2=r ,1=m ,m r >,故先选可观测标准型。 12100000=???????? ??---=m m m m m m m m m m o I a I I a I I a A ???? ? ?? ? ??---=61 01101 600 ??? ? ???? ??=??????????=00 11 13 210βββo B ,[][]10 001===m m m m o I C (2)检验可观测标准型实现∑),,(o o o C B A 是否可控。 [] ???? ? ?????------==53 1 1 11111311660013 2 o o o o o c B A B A B Q n rankQ c ==3,故∑),,(o o o C B A 可控可观测,∑),,(o o o C B A 为最小实现。 四、可控性、可观测性与传递函数矩阵的关系 定理4.12 : SISO 系统可控且可观测的充分必要条件是:由动态方程导出的传递函数不存在零极点对消(即传递函数不可约)。 SISO 系统可控的充分必要条件是:b A sI 1 )(--不存在零极点对消。 SISO 系统可观测的充分必要条件是:1 )(--A sI c 不存在零极点对消。 【例4.9.5】试分析下列系统的可控性、可观测性与传递函数的关系。 (1)u x x ?? ????+???? ??-=105.15 .210 ,[]x y 15.2=
第四章 线性系统的可控性和可观性 §4-1 问题的提出 经典控制理论中用传递函数描述系统的输入—输出特性,输出量即被控量,只要系统是因果系统并且是稳定的,输出量便可以受控,且输出量总是可以被测量的,因而不需要提出可控性和可观性的概念。 现代控制理论是建立在用状态空间法描述系统的基础上的。状态方程描述输入)(t u 引起状态)(t x 的变化过程;输出方程描述由状态变化所引起的输出)(t y 的变化。可控性和可观性正是定性地分别描述输入)(t u 对状态)(t x 的控制能力,输出)(t y 对状态)(t x 的反映能力。它们分别回答: “输入能否控制状态的变化”——可控性 “状态的变化能否由输出反映出来”——可观性 可控性和可观性是卡尔曼(Kalman )在1960年首先提出来的。可控性和可观性的概念在现代控制理论中无论是理论上还是实践上都是非常重要的。例如:在最优控制问题中,其任务是寻找输入)(t u ,使状态达到预期的轨线。就定常系统而言,如果系统的状态不受控于输入)(t u ,当然就无法实现最优控制。另外,为了改善系统的品质,在工程上常用状态变量作为反馈信息。可是状态)(t x 的值通常是难以测取的,往往需要从测量到的)(t y 中估计出状态)(t x ;如果输出)(t y 不能完全反映系统的状态)(t x ,那么就无法实现对状态的估计。 状态空间表达式是对系统的一种完全的描述。判别系统的可控性和可观性的主要依据就是状态空间表达式。 【例如】 (1)u x x ?? ? ???+??????=202001 []x y 01= 分析:上述动态方程写成方程组形式:?? ? ??=+==1221122x y u x x x x 从状态方程来看,输入u 不能控制状态变量1x ,所以状态变量1x 是不可控的;从输出方程看,输出y 不能反映状态变量2x ,所以状态变量2x 是不能观测的。 即状态变量1x 不可控、可观测;状态变量2x 可控、不可观测。
实验十 系统能控性与能观性分析 一、实验目的 1. 通过本实验加深对系统状态的能控性和能观性的理解; 2. 验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。 二、实验设备 同实验一。 三、实验内容 1. 线性系统能控性实验; 2. 线性系统能观性实验。 四、实验原理 系统的能控性是指输入信号u 对各状态变量x 的控制能力。如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。则称系统是能控的。 系统的能观性是指由系统的输出量确定系统所有初始状态的能力。如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。 对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中 4 32 1R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量 i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。即系统能观的。 反之,当 4 32 1R R = R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制, u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。 1.1 当 4 32 1R R R R ≠时 u L u i R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L u i C L C L ? ??? ? ??+? ??? ???????? ??+++-+- +- ? ?+- +- +++- =???? ??01)11(1)( 1 ) ( 1)( 14321434 3212 14 342 124 3432 121 (10-1) y=u c =[0 1] ??? ? ? ??c L u i (10-2) 由上式可简写为 bu Ax x += cx y = 式中???? ??=C L u i x ???? ?? ? +++- +-+- ? ?+-+-++ +-=)11( 1)( 1 )( 1)( 1 432 1434 3212 14 342 124 343212 1R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A
第五章 MIMO 非线性系统的反馈线性化初步理论 引言: 对于多输入多输出系统仍可以用下列紧缩的形式的方程来描述: )()()(x h y u x g x f x =+=& (*) n R x ∈ 若输入的个数与输出的个数的数目相同时,可令 ) 1( )](),...,([)()1()](),...,([)()()](),...,([)() 1() ,...,() 1(),...,(11111?=?=?=?=?=m x h x h Col x h n x f x f Col x f m n x g x g x g m y y Col y m u u Col u m n m m m )(),...,(),(1x g x g x f m 均是光滑的向量场,)(),...,(1x h x h m 是光滑的函数,均定义在n R 的某个开集上。 5.1 向量相对阶和总相对阶: 一个多变量非线性系统(*),在οx 处有向量相对阶},...,{1m r r 是指: (i) 0)(=x h L L i k f g j 对所有:111-<≤≤≤≤i r k m i m j οx x ∈?的邻域 (ii) m m ?矩阵 ?? ?? ? ? ?????? ??=------)(.. ) (. ...)(..)() (.. )()(11212111 11 12211 1 1x h L L x h L L x h L L x h L L x h L L x h L L x A m r f g m r f g r f g r f g r f g r f g m m m m m 在οx x =处是非奇异的。 注意: (1)该定义涵盖了SISO 系统。 (2)整数m r r ,...,1中的某个i r 是与系统第i 个输出)(x h i 有关的。行向量: )](),...,([111x h L L x h L L i r f g i r f g i m i --,至少有一个元素是非零的,
第三章 线性系统的可控性与可观性
§1 可控、可观测性的概念 §2 线性系统的可控性 §3 线性系统的可观测性
c
e a e a
§4 线性系统的可控与可观测标准型
t
y c
第三章 线性系统的可控性与可观性
§1 可控、可观测性的概念 §2 线性系统的可控性 §3 线性系统的可观测性
c
§4 线性系统的可控与可观测标准型
t
y c
1
c
u1 u2 up
e a
M
系 统
M
x1 , x2 ,L, xn
y1 y2 yq
可控 ——系统所有状态变量都可以由
输入来影响和控制?
可观 ——系统所有状态变量都可以由
输出完全反映?
t
y c
1960年,美籍匈牙利人 R.E.Kalman 发表 “On the General Theory of Control Systems”等 论文,引入状态空间法分析系统,提出可控性、 可观测性、最佳调节器和 kalman 滤波等概念, 奠定了现代控制理论的基础。
c
e a
t
y c
2
例:已知系统的动态方程:
& ? x1 ? ? 4 0 ? ? x1 ? ?1 ? ? x ? = ? 0 ? 5? ? x ? + ? 2 ? u ?? 2 ? ? ? ? &2 ? ? ?x ? y = [0 ? 6]? 1 ? ? x2 ?
c
L
& x1 = 4 x1 + u
& x2 = ?5 x2 + 2u
e a e a
iL
R
u 可以控制 x1、x2 , 系统完全可控! y 无法反映 x1,
y = ?6 x2
系统不完全可观!
系统可控、不可观测!
t
y c
例:已知桥式电路
选取 x1 = iL , x2 = uC
R R
u
c
C
y = x2 = uC
若 x2 (t0 ) = uC (t0 ) = 0 则 x2 (t ) ≡ 0, t ≥ t0
R
uC
u 只能控制 x1,不能控制 x2
x2 不可控!
y = x2 ≡ 0 不能由 y 反映 x1的变化
系统不可控、不可观测!
t
x1 不可观测!
y c
3
信号与线性系统题解 阎鸿森 第二章 习题答案 2.1 (1) 已知连续时间信号()x t 如图P2.1(a)所示。试画出下列各信号的波形图,并加以标 注。 (a) (2)x t - (b) (1)x t - (c) (22)x t + (2) 根据图P2.1(b)所示的信号()h t ,试画出下列各信号的波形图,并加以标注。 (a) (3)h t + (b) (2)2 t h - (c) (12)h t - (3) 根据图P2.1(a)和(b)所示的()x t 和()h t ,画出下列各信号的波形图,并加以标注。 (a) ()()x t h t - (b) (1)(1)x t h t -- (c) (2)(4)2 t x h t -+ 图P2.1 解:(1) 各信号波形如下图所示:
(a) (b)(c) 1 2 (2)x t -(1)x t -(22)x t +t t t 22 22111 11210 01 -1-1 -2 -2 -3 5 (2) 各信号波形如下图所示: (a) (b)(c) 12 12 -32 (3)h t +(2)2t h -(12) h t -t t t 00 1 1 1 12468 1-2-3-4-5- (3) 各信号波形如下图所示: ()()x t h t -(1)(1)x t h t --(2)2 t x -(a) (b) (c) t t t ∴(2/2)(4)0 x t h t -+=00 111112 2222 2 1-1-4 6 2 - 2.2 已知信号(52)x t -的波形图如图P2.2所示,试画出()x t 的波形图,并加以标注。 (52) x t -t 3252 1123 图P2.2 解:波形如下图所示:
第五章 线性定常系统的状态反馈和状态观测器设计 闭环系统性能与闭环极点(特征值)密切相关,经典控制理论用输出反馈或引入校正装置的方法来配置极点,以改善系统性能。而现代控制理论由于采用了状态空间来描述系统,除了利用输出反馈以外,主要利用状态反馈来配置极点。采用状态反馈不但可以实现闭环系统极点的任意配置,而且还可以实现系统解耦和形成最优控制规律。然而系统的状态变量在工程实际中并不都是可测量的,于是提出了根据已知的输入和输出来估计系统状态的问题,即状态观测器的设计。 §5-1 状态反馈与闭环系统极点的配置 一、状态反馈 1、状态反馈的概念 状态反馈就是将系统的每一个状态变量乘以相应的反馈系数反馈到输入端与参考输入相加,其和作为受控系统的输入。 设SISO 系统的状态空间表达式为: bu Ax x += cx y = 状态反馈矩阵为k ,则状态反馈系统动态方程为: )(kx v b Ax x -+= bv x bk A +-=)( cx y = 式中: k 为n ?1矩阵,即[]11 -=n o k k k k ,称为状态反馈增益矩阵。 )(bk A -称为闭环系统矩阵。 闭环特征多项式为 ) (bk A I --λ。 可见,引入状态反馈后,只改变了系统矩阵及其特征值,c b 、阵均无变化。 状态反馈系统结构图
【例5.1.1】已知系统如下,试画出状态反馈系统结构图。 u x x ?? ? ? ? ?????+??????? ???--=10020 110010 , []x y 00 4= 解:[]x k k k v kx v u 21 -=-= 其中[]21 k k k k =称为状态反馈系数矩阵或状态反馈增益矩阵。 ??? ?? ??=+-=+-==1333222142x y u x x x x x x x 说 明:如果系统为r 维输入、m 维输出的MIMO 系统,则反馈增益矩阵k 是一个m r ?维矩阵。即 m r rm r r m m k k k k k k k k k k ???? ??? ??????= 2 1 2222111211 2、状态反馈增益矩阵k 的计算 控制系统的品质很大程度上取决于该系统的极点在s 平面上的位置。因此,对系统进行综合设计时,往往是给出一组期望的极点,或者根据时域指标提出一组期望的极点。所谓极点配置问题就是通过对反馈增益矩阵k 的设计,使闭环系统的极点恰好处于s 平面上所期望的位置,以便获得期望的动态特性。 本节只讨论SISO 系统的极点配置问题,因为SISO 系统根据指定极点所设计的状态反馈增益矩阵是唯一的。
X 第二章 连续系统的时域分析习题解答 2-1 图题2-1所示各电路中,激励为f (t ),响应为i 0(t )和u 0(t )。试列写各响应关于激励微分算子方程。 解: . 1)p ( ; )1(1)p ( , 111 , 1 111)( )b (; 105.7)625(3 102 ; )(375)()6253(4) ()()61002.041( )a (0202200 204006000f i p f p u p f p p p u i f p p p p p f t u pf i p pu i t f t u p t f t u p =+++=++?++=+=+++= ++= ?=+??==+?=++-- 2-2 求图题2-1各电路中响应i 0(t )和u 0(t )对激励f (t )的传输算子H (p )。 解:. 1 )()()( ; 11)()()( )b (; 625 3105.7)()()( ; 6253375)()()( )a (22 0 20 40 0 +++==+++== +?==+== -p p p p t f t i p H p p p t f t u p H p p t f t i p H p t f t u p H f i f u f i f u 2-3 给定如下传输算子H (p ),试写出它们对应的微分方程。 . ) 2)(1() 3()( )4( ; 323)( )3(; 3 3)( )2( ; 3)( )1( +++=++=++=+= p p p p p H p p p H p p p H p p p H 解:; 3d d 3d d )2( ; d d 3d d )1( f t f y t y t f y t y +=+=+ . d d 3d d 2d d 3d d )4( ; 3d d 3d d 2 )3( 2222t f t f y t y t y f t f y t y +=+++=+ 2-4 已知连续系统的输入输出算子方程及0– 初始条件为: . 4)(0y ,0)(0y )y(0 ),()2(1 3)( )3(; 0)(0y ,1)(0y ,0)y(0 ),()84() 12()( )2(; 1)(0y ,2)y(0 ),()3)(1(4 2)( )1(---2 ---2 --=''='=++==''='=+++-=='=+++= t f p p p t y t f p p p p t y t f p p p t y f (u 0(t ) (b) u 0(t ) (a) 图题2-1
实 验 报 告 课程 自动控制原理 实验日期 12 月26 日 专业班级 姓名 学号 实验名称 系统的能控性与能观性分析及状态反馈极点配置 评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念,掌握状态反馈极点配置方法,掌握如何使用MATLAB 进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的最小实现; 3、进行状态反馈系统的极点配置; 4、研究不同配置对系统动态特性的影响。 二、实验内容 1.能控性、能观测性及系统实现 (a )了解以下命令的功能;自选对象模型,进行运算,并写出结果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, mineral ; (b )已知连续系统的传递函数模型,18 2710)(23++++= s s s a s s G , 当a 分别取-1,0,1时,判别系统的能控性与能观测性;
(c )已知系统矩阵为??????????--=2101013333.06667.10666.6A ,?? ??? ?????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101 )(2 3++++=s s s s s G 的最小实现。 2.实验内容 原系统如图1-2所示。图中,X 1和X 2是可以测量的状态变量。 图1-2 系统结构图 试设计状态反馈矩阵
,使系统加入状态反馈后其动态性能指标满足给定的要求: (1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为: σ%≤20%,ts≤1秒。 (2) 已知:K=1,T=0.05秒,要求加入状态反馈后系统的动态性能指标为: σ%≤5%,ts≤0.5秒。 状态反馈后的系统,如图1-3所示:
线性系统理论中状态反馈综述 学号:1402028 姓名:王家林 现代控制理论源于20世纪60年代,以极大值等原理为形成标志,经典理论中以单一输入变量为研究对象,主要通过频率进行控制,现在控制理论以线性空间理论为基础,在时域中研究系统,能够定量的进行系统的分析和设计,随着计算机运算能力的发展,现代控制也在更多领域得到应用。控制系统是有受控对象和反馈控制器两部分组成的闭环系统,经典控制理论通常采用输出反馈,而现代控制理论多采用状态反馈。闭环系统极点的分布情况决定于系统的稳定性和动态品质,因此,可以根据对系统动态品质的要求,规定闭环系统的极点所具备的分布情况,把极点的配置作为系统的动态品质指标。这种把极点配置在某位置的过程称为极点配置。在空间状态法中,一般采用反馈系统状态变量或输出变量的方法,来实现系统的极点配置。 20世纪50年代以后,随着航天等技术发展和控制理论应用范围的扩大,经典线性控制理论的局限性日趋明显,它既不能满足实际需要,也不能解决理论本身提出的问题,这就推动了线性系统的研究,于是在1960年以后从经典阶段发展到现阶段。美国学者R.E.卡尔曼首先把状态空间法应用于多变量线性系统的研究,提出了能控性和能观性两个基本概念。其研究问题的方法主要有时域状态空间分析法,线性二次型最优状态调节器法,状态观测器控制法,李雅普诺夫稳定性分析法以及极点配置法等。近年来,计算机技术的迅速发展给需要大计算量的现代控制提供了更好的发展空间,同事工业生产的告诉发
展,是的工程界对控制的要求也日益提高,由此也极大地推动了现代控制理论的发展和完善。 在控制理论与实践中的一个基本要求是设计反馈控制率,将闭环系统的极点配置在制定的位置上,从而保证闭环系统具有所要求的动态和稳态特性。由于模型的不确定因素和各种扰动的存在,使得精确极点配置的控制方式不可能得到真正的实现。世纪设计中只能将闭环系统的极点配置在指定的区域内,就可以使系统获得满意的性能。近年来,对D稳定理论的研究十分活跃,利用这一理论研究区域极点配置问题已取得一些成果,包括最优控制、鲁棒性等方面。 在对系统的分析和设计中,首先要考虑的是系统的稳定性问题,而线性系统的稳定性与其极点的位置紧密相关,因此极点配置问题在系统设计中是很重要的。为此,需要根据分析和设计的目的,将系统极点配置在指定区域内或指定某个位置。 所谓极点配置问题,就是通过反馈矩阵的选择,使闭环系统的极点,即闭环特征方程的特征值恰好处于所希望的一组极点位置上或者是某个区内。由于希望的极点具有一定的任意性,因此极点的配置也具有一定的任意性。 对于线性系统而言,其稳定性取决于状态的零输入响应,因而取决于系统极点的分布,当极点的实部小于零时,系统是稳定的;当极点分布在虚轴上时,系统是临界稳定的;当极点的实部大于零时,系统是不稳定的。同事,系统动态响应的基本特性也依赖于极点的分布,若系统极点是负实数,则系统动态响应时非周期的,按指数规律
§4-5 线性定常连续系统的可观测性 一、可观测性的定义 定义4.4(可观测性定义): 设线性定常连续系统的状态方程和输出方程为Bu Ax x += ,cx y =,如果对于任 一给定的输入)(t u ,存在一有限观测时间0t t f >,使得在],[0f t t 期间测量到的)(t y ,能唯一地确定系统的初始状态)(0t x ,则称此状态是可观测的。若系统的每一个状态都是可观测的,则称系统是状态完全可观测的,简称系统是可观测的。 二、线性定常连续系统可观测性的判别准则 定理4.6:(可观测性判别准则Ⅰ) 线性定常连续系统Bu Ax x += ,cx y =,其状态完全可观测的充分必要条件是: 由A 、C 构成的可观测性判别矩阵 ????? ? ??? ???=-1n o cA cA c Q 满秩,即 n r a n k Q o = 【例4.5.1】判别可观测性 (1)u x x ?? ? ???+??????-=110154 ,[]x y 11-= (2)u x x ??????-+??????--=1131 12 ,x y ?? ? ???-=0101 (3)u x x ?? ????+???? ??=1110 01 ,[]x y 11= 说明: 在定义中之所以把可观测性规定为对初始状态的确定,这是因为一旦确定了初始状态,便可根据给定输入,利用状态方程的解 ? -+-=t t d Bu t t x t t t x 0 )()()()()(00τττφφ 就可以求出各个瞬间状态。
解:(1)?? ? ???--=???? ??=5511 cA c Q o ,21<=o rankQ ,故系统是不可观测的。 (2)????? ???? ???---=??? ???=1212 101cA c Q o ,22==o rankQ ,故系统是可观测的。 (3)?? ? ???=??????=1111 cA c Q o ,21<=o rankQ ,故系统是不可观测的。 定理4.7:(可观测性判别准则Ⅱ) 设线性定常连续系统Bu Ax x += ,cx y =,A 阵具有互不相同的特征值,则其状态完全可观测的充分必要条件是系统经非奇异变换后的对角标准型 u B x x n +??? ? ? ?? ???=λλ0 01 , x c y = 中的矩阵c 中不含元素全为零的列。 【例4.5.2】判别可观测性 (1)u x x ?? ? ? ? ?????+??????????=10030 020001 ,[]x y 23 5= 解:系统可观测。 (2)u x x ?? ? ? ? ?????+??????????=10030 020001 ,[]x y 03 5= 解:系统不可观测。 定理4.8:(可观测性判别准则 Ⅲ) 设线性定常连续系统Bu Ax x += ,cx y =,A 阵具有重特征值,且每一个特征值只对
8.4线性系统的可控性和可观测性 8.4.1可控性和可观测性的概念 第三节介绍了系统的稳定性,本节接着介绍系统另外两个重要特性,即系统的可控性和可观测性,这两个特性是经典控制理论所没有的。在用传递函数描述的经典控制系统中,输出量一般是可控的和可以被测量的,因而不需要特别地提及可控性及可观测性的概念。现 代控制理论用状态方程和输出方程描述系统,输出和输入构成系统的外部变量,而状态为系 统的内部变量,系统就好比是一块集成电路芯片,内部结构可能十分复杂,物理量很多,而 外部只有少数几个引脚,对电路内部物理量的控制和观测都只能通过这为数不多的几个引脚进行。这就存在着系统内的所有状态是否都受输入控制和所有状态是否都可以从输出反映出来的问题,这就是可控性和可观测性问题。如果系统所有状态变量的运动都可以通过有限的控制点的输入来使其由任意的初态达到任意设定的终态,则称系统是可控的,更确切的说是 状态可控的;否则,就称系统是不完全可控的,简称为系统不可控。相应地,如果系统所有的状态变量任意形式的运动均可由有限测量点的输出完全确定出来,则称系统是可观测的,简称为系统可观测;反之,则称系统是不完全可观测的,简称为系统不可观测。 可控性与可观测性的概念,是用状态空间描述系统引伸出来的新概念,在现代控制理论 中起着重要的作用。可控性、可观测性与稳定性是现代控制系统的三大基本特性。 下面举几个例子直观地说明系统的可控性和可观测性。 (a) (b) (c) 图8-20 电路系统可控性和可观测性的直观判别 对图8-20所示的结构图,其中图(a)显见洛受U的控制,但X2与U无关,故系统不可控。系统输出量丫=捲,但X!是受X2影响的,y能间接获得X2的信息,故系统是可观测的。图(b)中的,X2均受u的控制,故系统可控,但y与X2无关,故系统不可观测。图 (c)中的X i、X2均受u的控制,且在y中均能观测到X i、X2,故系统是可控可观测的。 只有少数简单的系统可以从结构图或信号流图直接判别系统的可控性与可观测性,如果系统结构复杂,就只能借助于数学方法进行分析与研究,才能得到正确的结论。
线性控制系统(0600004) 一、课程编码:0600004 课内学时: 48 学分: 3 二、适用学科专业:控制科学与工程、控制工程 三、先修课程:自动控制原理,现代控制理论,矩阵分析 四、教学目标 通过本课程的学习, 使学生了解线性系统理论基础,掌握时变、时不变多变量系统的状态空间描述;掌握系统稳定性理论、系统可控性与系统可观测性理论;掌握线性系统反馈理论,实现系统状态反馈极点配置、状态反馈解耦、镇定等;掌握状态观测器的设计方法,掌握具有观测器的状态反馈系统设计,提升学生对控制系统分析和系统设计的能力。 五、教学方式 课堂讲授 六、主要内容及学时分配 1.系统的数学描述 6学时 1.1 输入-输出描述 1.2 状态空间描述 1.3 输入-输出描述和状态变量描述的比较 2.线性系统运动分析 4学时 2.1 线性系统的运动分析 2.2 等价动态方程 2.3 脉冲响应矩阵及其实现 3.线性动态方程的可控性和可观测性 8学时 3.1 线性动态方程的可控性 3.2 线性动态方程的可观测性 3.3 线性时不变动态方程的规范性分解 3.4 约当形动态方程的可控性和可观测性 3.5 输出可控性和输出函数可控性 4.标准型和不可简约实现 3学时 4.1 正则有理矩阵的特征多项式和次数 4.2 动态方程的可控和可观测标准型 4.3 不可简约矩阵分式描述的最小实现 5.状态反馈和状态观测器 8学时 5.1 状态反馈和输出反馈 5.2 状态反馈极点配置 5.3 状态观测器及状态观测器的设计 5.4 基于观测器的状态反馈控制系统特性 6.线性系统的镇定、解耦及最优控制 3 学时
6.1 状态反馈镇定 6.2 状态反馈解耦 6.3 线性二次型最优控制 7.系统的运动稳定性 8学时 7.1 李亚普诺夫意义下的运动稳定性 7.2 线性系统的稳定性 7.3 李亚普诺夫第二方法 8.离散时间线性系统 4学时 8.1 连续时间系统的离散化 8.2 离散时间线性系统的数学描述 8.3 离散时间线性系统的运动分析 8.4 离散时间线性系统的可控性与可观测性 8.5 离散时间线性系统的李亚普诺夫稳定性分析 8.6 离散时间线性系统状态反馈 9.组合系统 4学时 9.1 组合系统的状态空间描述和传递函数描述 9.2 组合系统的可控性和可观测性 9.3 组合系统的稳定性 9.4 单位反馈系统设计 9.5 渐进跟踪和干扰抑制 9.6 输入输出反馈系统 七、考核与成绩评定 成绩以百分制衡量。成绩评定依据:平时成绩占20%,期末笔试成绩占80%。 八、参考书及学生必读参考资料 1. 姚小兰,李保奎,耿庆波.线性系统理论[M].北京:高等教育出版社 2. 郑大钟. 线性系统理论(第2版)[M].北京:清华大学出版社,2002 3. 陈啟宗. 线性系统理论与设计[M]. 北京:科学出版社,1988 4. 段广仁.线性系统理论[M].哈尔滨:哈尔滨工业大学出版社,200 九、大纲撰写人:姚小兰、李保奎
§4-5 线性定常连续系统的可观测性 一、可观测性的定义 定义4.4(可观测性定义): 设线性定常连续系统的状态方程和输出方程为Bu Ax x += ,cx y =,如果对于任 一给定的输入)(t u ,存在一有限观测时间0t t f >,使得在],[0f t t 期间测量到的)(t y ,能唯一地确定系统的初始状态)(0t x ,则称此状态是可观测的。若系统的每一个状态都是可观测的,则称系统是状态完全可观测的,简称系统是可观测的。 二、线性定常连续系统可观测性的判别准则 定理4.6:(可观测性判别准则Ⅰ) 线性定常连续系统Bu Ax x += ,cx y =,其状态完全可观测的充分必要条件是: 由A 、C 构成的可观测性判别矩阵 ????? ? ??? ???=-1n o cA cA c Q 满秩,即 n r a n k Q o = 【例4.5.1】判别可观测性 (1)u x x ?? ? ???+??????-=1101 54 ,[]x y 11-= (2)u x x ??????-+???? ??--=113112 ,x y ?? ? ???-=0101 说明: 在定义中之所以把可观测性规定为对初始状态的确定,这是因为一旦确定了初始状态,便可根据给定输入,利用状态方程的解 ? -+-=t t d Bu t t x t t t x 0 )()()()()(00τττφφ 就可以求出各个瞬间状态。
(3)u x x ?? ? ???+??????=1110 01 ,[]x y 11= 解:(1)?? ? ? ??--=??????=55 11 cA c Q o ,21<=o rankQ ,故系统是不可观测的。 (2)????? ???? ???---=??? ???=12 12 101cA c Q o ,22==o rankQ ,故系统是可观测的。 (3)?? ? ? ??=??????=11 11 cA c Q o ,21<=o rankQ ,故系统是不可观测的。 定理4.7:(可观测性判别准则Ⅱ) 设线性定常连续系统Bu Ax x += ,cx y =,A 阵具有互不相同的特征值,则其状态完全可观测的充分必要条件是系统经非奇异变换后的对角标准型 u B x x n +??? ? ? ?? ???=λλ0 01 , x c y = 中的矩阵c 中不含元素全为零的列。 【例4.5.2】判别可观测性 (1)u x x ?? ? ? ? ?????+??????????=10030 020001 ,[]x y 23 5= 解:系统可观测。 (2)u x x ?? ? ? ? ?????+??????????=10030 020001 ,[]x y 03 5= 解:系统不可观测。
万方数据
万方数据
LQR控制的仿真曲线 参考文献: 【1】翁正新,王广雄,姚一新.鲁棒H一状态反馈控制【J].[2]张姝,朱善安.环形单级倒立摆起摆控制研究[J】江南控制理论与应用,1994,11(4):456—459.大学学报(自然科学版),2004,3(5):482—485. 枣木牛枣木木幸木术木木}木堆术}枣木宰木水牛术木木水木术木木水木木木枣半水幸车木丰水木木半半水率术水木木木水木术丰木木术木术半丰串水牛丰木木木术丰木冰术术水木半木木球串牢木木木毕木半半禾半半水水术水水车枣木术术木术丰木术水木木(土接劳50黄)确定各通讯数据的cANID编码规3协议编制与仿真 则。数据ID编码决定cAN通讯协议的优劣和CAN 总线能否正常工作。CAN通讯系统既有全局和局部 广播数据或点对点发送数据。各数据有不同优先级。故好的通讯协议应具备:①各数据以不同优先级 发送;②通过对屏蔽码设置,各接点只接收所需 信息;③ID值要充分表示数据各种信息(含源地 址、目的地址、数据内容和格式等);④系统应具有可扩展性。, 例如:制定10个节点CAN通信系统的通讯协 议,采用cAN2.0B标准11位ID,如表1。将ID0~ IDl0中标志符的高7位ID4~IDl0定义为地址段,标记CAN总线中不同的通讯站点;标识符的低4位IDO~ID3为指令段,标记各站点的不同数据后, 后4位用0填充,采用16进制4位描述数据标识,如0x0000;每个接点可用后4位标记不同数据。如以广播。O方式发数据的编码有GB0.1(0X0000)、GB0.2(0x0020)…GB0.16(0x01E0)。按此编码,各接点通过屏蔽码前7位的设置,使接点可接收广 播0数据。接点1、6不仅可接发按自己接点编码的 数据还可接收所有广播数据。接点2、5只接收按自己接点编码数据和广播0数据;接点3、7、10可接 收按自己接点编码数据和广播0、广播2数据;接 点4、8、9可接收按自己接点编码数据和广播0及l数据。也可通过系统的不同要求做相应改动。 表1制定10个节点cAN通信系统的通讯协议 嚣隧蹲|蘩@j馥谗莲嘲“瀑瀚j“蕊暖警曝??j|酶舔。;瓷蕊强蕊÷÷0OO0O0O0XO000GBO广播O0OO0O010X0200GBl广播1 OOO0Ol0OX0400GB2广播20OOOOl1OX0600GB3广播3OO011l1OXlEOOJDl接点1OO101OO0X2800JD2接点2O01lO1O0X3400JD3接点3O1OOlO1OX4A00JD4接点40lOlO0OOX5000JD5接点50l1OO11OX6600JD6接点61OOOl10OX8COOJD7接点71001O01OX9200JD8接点8lO1OO01OXA200JD9接点9l1OO0lOOXC400JDl0接点10?58? 确定以上通讯约束条件和编码规则后,制定通讯协议变得简单,只需按上述约束条件和编码规则对需传输的数据编码即可。协议制定后应仔细检查,在对系统进行通讯实验与仿真后,可发布到各通讯接点的研制单位进行通讯系统的设计与调试。 4结语 CAN—Bus已被广泛应用到各自动化控制系统中,好的CAN通讯协议有利提高系统通讯的速率与可靠性,充分发挥cAN—Bus自身的特点。 参考文献: [1]杨宪惠.现场总线技术及其应用[M】.北京:清华大学出版社,2001. [2】邬宽明.总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1995. 对电子信息系统尽快形成作战能力的思考 徐忠杰1,李洪峰2 (1.炮兵学院,安徽合肥23003l;2.73111部队,福建厦门36lOOO)摘要:电子信息系统能否尽快形成作战能力,对做好军事斗争准备具有重要影响。我军电子信息系统存在的问题延缓了系统形成作战能力的步伐,必须从确立正确观念、加强系统需求分析、运用系统集成手段整合现役系统以及创建系统运用理论,加强系统训练等方面加以解决。 ThinkingofHowtoMakeElectronic InformationSVstemCombatCapabilitVSoon xuzhong_jiel,LIHong—fen92 (1.ArtilleryAcademyofPLA,Hefei230031,China; 2.Unit73111ofPLA,Xiamen361000,China) Abstract:Whethertheelectronicinformationsystemcanformcombatcapabilityquicklywill greatly innuencethemilitaryconflictpreparation.Theproblemsofourafmyelectronicinformationsystemdelayestablishingthecombatcapability.Theproblemscanberesolvedbyestablishingtherightidea,strengtheningthesystemrequirements,makinguseoftheintegrationmeanto confomthecurrentsystem,establishingthesystemusagetheoryandstrengtheningsystem training. 万方数据
第三章 线性控制系统的能控性和能观性 注明:*为选做题 3-1 判别下列系统的能控性与能观性。系统中a,b,c,d 的取值对能控性与能观性是否有关,若有关其取值条件如何? (1)系统如图所示。 题3-1(1)图 系统模拟结构图 (2)系统如图所示。 题3-1(2)图 系统模拟结构图 (3)系统如下式: 1122331122311021010000200000x x x a u x x b x x y c d x y x ?????-?????? ? ??? ? ?=-+ ??? ? ? ??? ? ?-?????? ??? ?????? ?= ? ? ????? ??? 3-2* 时不变系统:
311113111111x x u y x ? -????=+ ? ?-??????= ?-?? 试用两种方法判别其能控性与能观性。 3-3 确定使下列系统为状态完全能控和状态完全能观的待定常数,i i αβ。 (1)0∑()1201,,1101A b C αα????===- ? ????? (2) ()230021103,,001014A b C ββ???? ? ?=-== ? ? ? ?-???? 3-4* 线形系统的传递函数为: ()()32102718 y s s a u s s s s +=+++ (1)试确定a 的取值,使系统为不能控或不能观的。 (2)在上述a 的取值下,求使系统为能控状态空间表达式。 (3)在上述a 的取值下,求使系统为能观的状态空间表达式。 3-5* 试证明对于单输入的离散时间定常系统(,)T G h =∑,只要它是完全能控 的,那么对于任意给定的非零初始状态0x ,都可以在不超过n 个采样周期的时间内,转移到状态空间的原点。 3-6 已知系统的微分方程为: 61166y y y y u ?????? +++= 试写出其对偶系统的状态空间表达式及其传递函数。 3-7 已知能控系统的状态方程A,b 阵为: 121,341A b -????== ? ????? 试将该状态方程变换为能控标准型。 3-8已知能观系统的状态方程A,b ,C 阵为: ()112,,11111A b C -????===- ? ????? 试将该状态空间表达式变换为能观标准型。 3-9 已知系统的传递函数为: 2268()43 s s W s s s ++=++