《机器人技术及其应用》课程教学大纲
课程编号:0806433208
课程名称:机器人技术及其应用
英文名称:Robot Technique and Application
课程类型:专业任选课
总学时:32 讲课学时:22 实验学时:10
学分:2
适用对象:自动化(系统集成)专业
先修课程:高等数学、线性代数、理论力学、自控原理
一、课程性质、目的和任务
本课程是自动化(系统集成)专业的专业必修课。本课程是一门融运动、力学分析、机械结构及控制为一体的综合性课程。自动化(系统集成)专业的学生可以通过本课程的学习,对已学的如机械、自控等课程具备感性认识,并学会如何将理论与实践结合,用理论为工程服务。同时,掌握机器人的基本原理、基本结构、基本控制方式及基本研究方法,为自动化(系统集成)专业的学生今后从事机电技术工作打下一定的基础。
二、教学基本要求
教学分为课堂教学与实验训练两部分。
课堂教学要求:
1、了解机器人发展历史,研究进展、机器人的应用情况。
2、熟悉机器人控制理论,机器人的感知和智能理论和机器人系统设计方法。
3、掌握机器人的基本结构原理、定义、特点、结构、分类、机器人自由度,坐标系统的定义;掌握拉格朗日方程建立机械臂的动力学方程。
4、重点掌握齐次坐标连续变换、连杆坐标系,运动学方程求解,机器人雅克比公式和直流伺服电机进行机器人手腕位置控制。
三、教学内容及要求
1、绪论:了解机器人的发展与定义、分类与组成,以及机器人学的相关理论与技术。
2、机器人学的基础理论:掌握刚体的位姿描述方法和用拉格朗日方程建立机械臂的动力学方程,重点掌握齐次坐标连续变换、连杆坐标系,运动学方程求解。
3、机器人控制理论与技术:掌握了解机器人的轨迹控制、力控制的方式方法。
4、机器人传感器技术及驱动技术:掌握常用传感器分类和各种传感器的特点,掌握各种机器人各种驱动技术的特点。
5、机器人系统设计:掌握一般工业机器人的系统设计方法。
四、实践环节
实验:
1、4自由度串联关节型机器人结构设计实验
2、4自由度串联关节型机器人结构设计实验
3、机器人虚拟装配实验
4、机器人运动学仿真实验
5、机器人动力学控制仿真实验
五、课外习题及课程讨论
为达到本课程的教学基本要求,课外习题(包括自测题)不应少于20题。
六、教学方法与手段
本课程采用多媒体课件和板书相结合方式进行课堂教学。
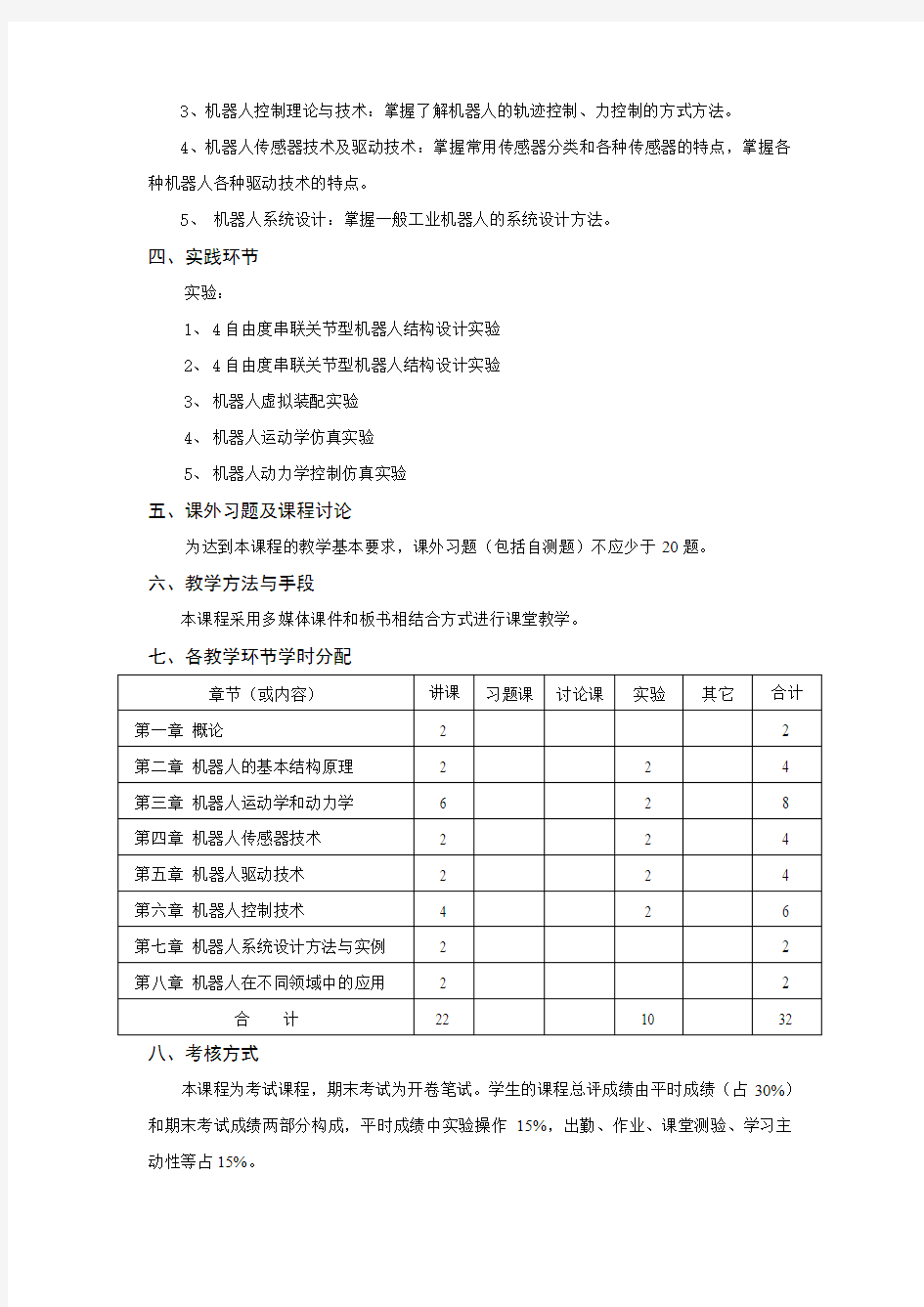
七、各教学环节学时分配
八、考核方式
本课程为考试课程,期末考试为开卷笔试。学生的课程总评成绩由平时成绩(占30%)和期末考试成绩两部分构成,平时成绩中实验操作15%,出勤、作业、课堂测验、学习主动性等占15%。
九、推荐教材和教学参考书
教材:《机器人技术与应用》,芮延年主编,化学工业出版社,2008.7。
参考书:《机器人探索—工程实践指南》Fred G.Martin主编,电子工业出版社,2004年8月。
十、说明
无
《机器人技术与应用》课程实验教学大纲
一、实验教学目标与基本要求
《机器人技术与应用》课程是自动化(系统集成)专业的一门专业基础课。实验是课程重要的实践教学环节,通过老师的相关演示和同学对特定实例的操作,培养对机器人结构三维设计软件及机器人运动控制仿真软件的初步认识,掌握基本的机器人三维结构设计方法与运动学仿真方法,为后续的相关的机器人课程设计与毕业设计打下良好基础。
二、本实验课程的基本理论与实验技术知识
本上机实验要求初步掌握PROE的基本命令和操作方法,掌握一般机械臂结构的设计方法,学会利用ADAMS运动学仿真软件进行机器人的运动学动力学仿真分析,熟悉利用其仿真机器人动作轨迹的仿真和控制的方法。
三、实验方法、特点与基本要求
1、4自由度串联关节型机器人结构设计实验1
内容有:学会三维结构设计软件CAXA的基本命令操作,包括实体的拉伸命令,旋转命令等,为后续设计机器人三维结构打下基础。
2、4自由度串联关节型机器人结构设计实验2
熟悉三维基本命令操作,构建一个4自由度串联关节型机器人的各主要零件的结构模型,并且要求在课内完成并发送到指定的电子邮箱,老师进行检查,作为平时成绩。
3、机器人虚拟装配实验
把前面做的零件模型进行三维虚拟装配,最终得到4自由度串联关节型机器人的整体模型。要求在课内完成并发送到指定的电子邮箱,老师进行检查,作为平时成绩。
4、机器人运动学仿真实验
利用ADAMS软件进行机器人机械臂的运动学仿真并验证MA TLAB的运动学计算结果是否正确,要求在课内完成并发送到指定的电子邮箱,老师进行检查,作为平时成绩。
5、机器人动力学控制仿真实验
利用ADAMS软件进行机器人机械臂的动力学仿真实验,得出相应的仿真数据,并利用轨迹点跟踪的命令,得到机器人动作的连续轨迹。要求在课内完成并发送到指定的电子邮箱,老师进行检查,作为平时成绩。
四、实验主要仪器设备
1、计算机
2、相应软件
五、实验项目的设置与内容提要
六、上机实验报告要求
每次上机操作的实验结果要求学生保留,并将其发送到任课老师的电子邮件信箱里,作为平时成绩的一部份,教师将学生作业存盘保留。
七、考核方式与成绩评定标准
1、对每个学生每次所做的上机操作,要求保存,并检查作业的认真情况,如有抄袭别人的作业,则按抄袭次数扣分。
2、上机实验成绩:全部上机操作分3次交,每次成绩各占1/3
八、教材及主要参考资料
教材:《机器人技术与应用》,芮延年主编,化学工业出版社,2008.7。
参考书:《机器人探索—工程实践指南》Fred G.Martin主编,电子工业出版社,2004年8月。
九、其他说明
机器人技术与应用实验的主要先修课程是《机械设计》,《机械工程基础》,学生通过有关内容的学习后,方可进行教学大纲设置的实验内容。