
永磁无刷直流电动机的基本工作原理
无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
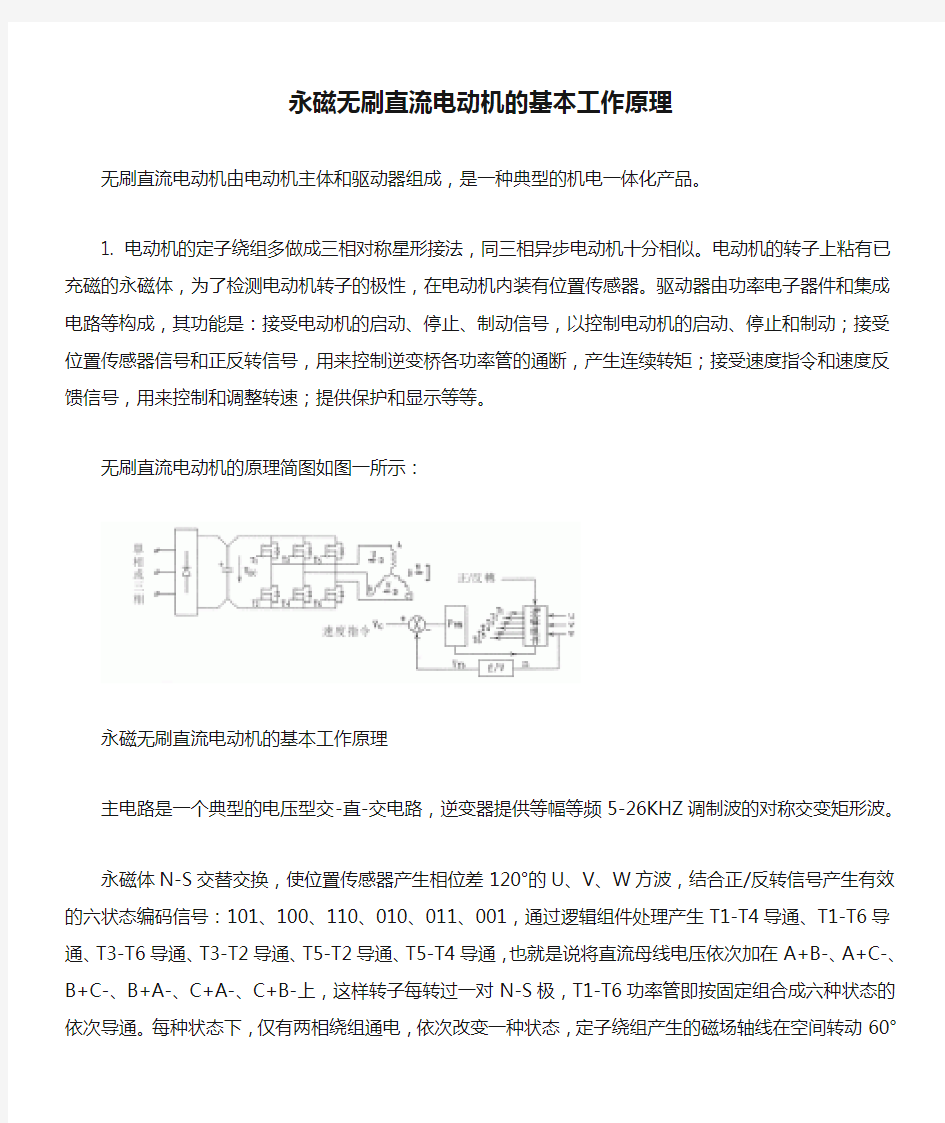
无刷直流电动机的原理简图如图一所示:
永磁无刷直流电动机的基本工作原理
主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。
永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。
2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。
由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。
电动机的转矩正比于绕组平均电流:
Tm=KtIav (N·m)
电动机两相绕组反电势的差正比于电动机的角速度:
ELL=Keω (V)
所以电动机绕组中的平均电流为:
Iav=(Vm-ELL)/2Ra (A)
其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩:
Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra)
Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
无刷直流电动机的转速设定,取决于速度指令Vc的高低,如果速度指令最大值为+5V对应的最高转速:Vc(max)ón max,那么,+5V以下任何电平即对应相当的转速n,这就实现了变速设定。
当Vc设定以后,无论是负载变化、电源电压变化,还是环境温度变化,当转速低于指令转速时,反馈电压Vfb变小,调制波的占空比δ就会变大,电枢电流变大,使电动机产生的电磁转矩增大而产生加速度,直到电动机的实际转速与指令转速相等为止;反之,如果电动机实际转速比指令转速高时,δ减小,Tm减小,发生减速度,直至实际转速与指令转速相等为止。可以说,无刷直流电动机在允许的电网波动范围内,在允许的过载能力以下,其稳态转速与指令转速相差在1%左右,并可以实现在调速范围内恒转矩运行。
由于无刷直流电动机的励磁来源于永磁体,所以不象异步机那样需要从电网吸取励磁电流;由于转子中无交变磁通,其转子上既无铜耗又无铁耗,所以效率比同容量异步电动机高10%左右,一般来说,无刷直流电动机的力能指针(ηcosθ)比同容量三相异步电动机高12%-20%。
3. 由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电动机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
中小容量的无刷直流电动机的永磁体,现在多采用高磁能积的稀土钕铁硼(Nd-Fe-B)材料。因此,稀土永磁无刷电动机的体积比同容量三相异步电动机缩小了一个机座号。
近三十年来针对异步电动机变频调速的研究,归根到底是在寻找控制异步电动机转矩的方法,而无刷直流电动机的电流或电枢的端电压,就是直接控制电动机转矩的物理量。过去,由于稀土永磁体价格比较高等因素,限制了稀土永磁无刷直流电动机的应用领域,但是随着技术的不断创新,其价格已迅速下降,例如,我公司推出得BS系列无刷直流电动机的售价已与异步电动机和普通变频器售价之和相差无几。稀土永磁无刷直流电动机必将以其宽调速、小体积、高效率和稳态转速误差小等特点在调速领域显现优势。
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 4. 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降, 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行,分别称为摪胧 只瘮或摶旌鲜綌、撊只瘮的永磁交流伺服系统。 到目前为止,高性能的电伺服系统大多采用永磁同步型交流伺服电动机,控制驱动器多采用快速、准确定位的全数字位置伺服系统。典型生产厂家如德国西门子、美国科尔摩根和日本松下及安川等公司。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000 r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦波驱动、80C、154CPU和门阵列芯片控制,力矩波动由24%降低到7%,并提高了可靠性。这样,只用了几年时间形成了八个系列(功率范围为0.05~6kW)较完整的体系,满足
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
直流电动机的工作原理:在电枢线圈中通入直流电流,电枢在磁场中旋转,换向器和电枢一起旋转。电枢一经转动,由于换向器配合电刷对电流的换向作用,直流电流交替地由线圈边ab,cd流入,使线圈边只要处于N极下,其中通过电流的方向总是从电刷A流入的方向,在S极下,电流总是从电刷B流出的方向。由此保证了每个磁极线圈边中的电流始终是一个方向,使电动机连续旋转。 直流发电机的工作原理:把电枢线圈感应产生的交变电动势,靠换向器配合电刷的换向作用, 使之从电刷端引出时为直流电动势。 直流电机的结构:定子(主磁极,换向极,机座,端盖,电刷装置)作用:产生磁场 转子(电枢铁心,电枢绕组,换向器,轴,风扇) 主要是电枢,作用:产生电磁转矩和感应电动势 可逆原理:同一台电机,既能做电动机运行,又能做发电机运行的原理,称为可逆原理。 直流电机的励磁方式:4种,串励,并励,他励,复励。 直流电机的空载磁场:直流电机不带负载时运行的状态称为空载运行。空载运行时电枢电流为零或近似为零,所以空载磁场是指主磁极励磁磁动势单独产生的励磁磁场。电枢磁动势:由电枢电流所建立的磁动势. 电枢反应:电枢磁动势对励磁磁动势所产生的气隙磁场的影响,称为电枢反应。 电枢反应影响电动机转速,发电机端电压。 电枢反应的作用:1负载时气隙磁场发生了畸变。2呈去磁作用。 改变电动机转向的方法:1改变电枢两端电压极性。2互换励磁绕组极性。 电机圆周在几何上分成360度,这个角度成为机械角度或空间角度。 导体切割磁场,经过N,S一对磁极,因而一对磁极占有的空间是360度 直流电机的3种调速方法:1改变电枢电压调速,2电枢回路串电阻调速,3改变励磁调速。 并励直流发电机的自励条件:1电机磁路中有剩磁 2励磁绕组并联到电枢两端 3励磁回路的总电阻小于临界点组 换向:元件内电流方向改变的过程。 变压器的分类:电力变压器,特种变压器. 变压器的主要部件:铁心,绕组,油箱。铁心和绕组装配组成器身。 变压器的特性指标:变压器二次侧的电压变化,变压器的效率 三相异步电动机的工作原理:就是通过一种旋转磁场与由这种旋转磁场借助于感应作用在转 子绕组内所感生的电流互相作用,以产生电磁转矩来实现拖动作用。 旋转磁场:一种极性不和大小不变,以一定转速旋转的磁场。 三相异步电动机的结构:定子(定子铁心,定子绕组,机座,端盖,风扇) 转子(转子铁心,转子绕组,转轴,气隙) 机械角度:电机圆周在几何上分成360度,机械角度总是360度。 电角度=P×机械角度=p×360 p:极对数
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
完美格式整理版 第一章永磁同步电机的原理及结构 1.1永磁同步电机的基本工作原理 永磁同步电机的原理如下在电动机的定子绕组中通入三相电流,在通入电流后就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会带动转子进行旋转,最终达到转子的旋转速度与定子中产生的旋转磁极的转速相等,所以可以把永磁同步电机的起动过程看成是由异步启动阶段和牵入同步阶段组成的。在异步启动的研究阶段中,电动机的转速是从零开始逐渐增大的,造成上诉的主要原因是 其在异步转矩、永磁发电制动转矩、 矩起的磁阻转矩和单轴转由转子磁路不对称而引等一系列的因素共同作用下而引起的,所以在这个过程中转速是振荡着上升的。在起 动过程中,质的转矩,只有异步转矩是驱动性电动机就是以这转矩来得以加速的,其 他的转矩大部分以制动性质为主。在电动机的速度由零增加到接近定子的磁场旋转转速时,在永磁体脉振转矩的影响下永磁同步电机的转速有可能会超过同步转速,而出现转速的超调现象。但经过一段时间的转速振荡后,最终在同步转矩的作用下而被牵入同步。 1.2永磁同步电机的结构 永磁同步电机主要是由转子、端盖、及定子等各部件组成的。一般来说,永磁 同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常非常的相似,主要是区别于转子的独特的结构与其它电机形成了差别。和常用的异步电机的最大不同则是转子的独特的结构,在转子上放有高质量的永磁体磁极。由于在转子上安放永磁体的位置有很多选择,所以永磁同步电机通常会被分为三大类:内嵌式、面贴式以及插入式,如图1.1所示。永磁同步电机的运行性能是最受关注的,影响其性能的因素有很多,但是最主要的则是永磁同步电机的结构。就面贴式、插入式和嵌入式而言,各种结构都各有其各自的优点。
交流电动机的工作原理 目前较常用的交流电动机有两种:1、三相异步电动机。2、单相交流电动机。第一种多用在工业上,而第二种多用在民用电器上。 一、三相异步电动机的旋转原理 三相异步电动机要旋转起来的先决条件是具有一个旋转磁场,三相异步电动机的定子绕组就是用来产生旋转磁场的。我们知道,但相电源相与相之间的电压在相位上是相差120度的,三相异步电动机定子中的三个绕组在空间方位上也互差120度,这样,当在定子绕组中通入三相电源时,定子绕组就会产生一个旋转磁场,其产生的过程如图1所示。图中分四个时刻来描述旋转磁场的产生过程。电流每变化一个周期,旋转磁场在空间旋转一周,即旋转磁场的旋转速度与电流的变化是同步的。旋转磁场的转速为:n=60f/P 式中f为电源频率、P是磁场的磁极对数、n的单位是:每分钟转数。根据此式我们知道,电动机的转速与磁极数和使用电源的频率有关,为此,控制交流电动机的转速有两种方法:1、改变磁极法;2、变频法。以往多用第一种方法,现在则利用变频技术实现对交流电动机的无级变速控制。 观察图1还可发现,旋转磁场的旋转方向与绕组中电流的相序有关。相序A、B、C顺时针排列,磁场顺时针方向旋转,若把三根电源线中的任意两根对调,例如将B相电流通入C 相绕组中,C相电流通入B相绕组中,则相序变为:C、B、A,则磁场必然逆时针方向旋转。利用这一特性我们可很方便地改变三相电动机的旋转方向。??? 定子绕组产生旋转磁场后,转子导条(鼠笼条)将切割旋转磁场的磁力线而产生感应电流,转子导条中的电流又与旋转磁场相互作用产生电磁力,电磁力产生的电磁转矩驱动转子沿旋转磁场方向以n1的转速旋转起来。一般情况下,电动机的实际转速n1低于旋转磁场的转速n。因为假设n=n1,则转子导条与旋转磁场就没有相对运动,就不会切割磁力线,也就不会产生电磁转矩,所以转子的转速n1必然小于n。为此我们称三相电动机为异步电动机。 二、单相交流电动机的旋转原理 单相交流电动机只有一个绕组,转子是鼠笼式的。当单相正弦电流通过定子绕组时,电动机就会产生一个交变磁场,这个磁场的强弱和方向随时间作正弦规律变化,但在空间方位上是固定的,所以又称这个磁场是交变脉动磁场。这个交变脉动磁场可分解为两个以相同转速、旋转方向互为相反的旋转磁场,当转子静止时,这两个旋转磁场在转子中产生两个大小相等、方向相反的转矩,使得合成转矩为零,所以电动机无法旋转。当我们用外力使电动机向某一方向旋转时(如顺时针方向旋转),这时转子与顺时针旋转方向的旋转磁场间的切割磁力线运动变小;转子与逆时针旋转方向的旋转磁场间的切割磁力线运动变大。这样平衡就打破了,转子所产生的总的电磁转矩将不再是零,转子将顺着推动方向旋转起来。 三.同步电动机的原理 同步电动机是属于交流电机,定子绕组与异步电动机相同。它的转子旋转速度与定子绕组所产生的旋转磁场的速度是一样的,所以称为同步电动机。正由于这样,同步电动机的电流在相位上是超前于电压的,即同步电动机是一个容性负载。为此,在很多时候,同步电动机是用以改进供电系统的功率因素的。 同步电动机在结构上大致有两种: 1、转子用直流电进行励磁。这种电动机的转子如图1所示,从图中可看出来,它的转子做成显极式的,安装在磁极铁芯上面的磁场线圈是相互串联的,接成具有交替相反的极性,并
三江学院 本科毕业设计(论文) 题目基于TI2812 DSP的无刷直流电动机 控制软件设计 电气与自动化工程学院院电气工程及其自动化专业学号B05071006 学生姓名邢小强 指导教师熊田忠 起讫日期2009年2月23日至2009年5月25日设计地点L422
摘要 无刷直流电机既具有直流电机结构简单、运行可靠、维护方便等一系列优点,还具备交流电机运行效率高、无励磁损耗及调速性能好等诸多优点,现已广泛应用于工业控制的各个领域。 本文在对无刷直流电动机调速系统的发展及应用综述的基础上,介绍了采用DSP芯片对无刷直流电动机进行换向与转速控制的微机控制系统。文中给出了系统的总体设计方案,分析了无刷直流电机的工作原理、控制电路、驱动电路,提出了软件控制无刷电机的策略。阐述了软件框架的基本结构以及各个模块的具体设计方法。文中还对DSP芯片(TMS320F2812)进行了一些介绍。 最后运用实际的硬件平台以及上位机软件(LabVIEW)对无刷直流电动机进行监控,证明了该系统工作良好,达到了预期目标。 关键词:无刷直流电动机,DSP芯片,软件控制
Abstract Brushless DC motor with a DC motor is simple in structure, reliable operation, easy maintenance, such as a series of advantages, also has high efficiency AC motor run, no excitation loss and good speed, and many other advantages, has been widely used in various industrial control field. This article in the brushless DC motor speed control system overview of the development and application on the basis of the paper introduces the DSP chip on the exchange of brushless DC motor and speed control to the Microcomputer Control System. In this paper, the overall design of the system program, analysis of the brushless DC motor working principle, control circuit, driver circuit, a software strategy for brushless motor control. Framework set out the basic structure of software modules, as well as the specific design methods. The article also DSP Core (TMS320F2812) to introduce a number. Finally, the use of the actual hardware platform, as well as PC software (LabVIEW) for brushless DC motor control, show that the system is good, reaching the target. Keywords: brushless DC motor, DSP chips, Control Software
第一章永磁同步电机的原理及结构 1.1永磁同步电机的基本工作原理 永磁同步电机的原理如下在电动机的定子绕组中通入三相电流,在通入电流后 就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会带动转子进行旋转,最终达到转子的旋转速度与定子中产生的旋转磁极的转速相等,所以可以把永磁同步电机的起动过程看成是由异步启动阶段和牵入同步阶段组成的。在异步启动的研究阶段中,电动机的转速是从零开始逐渐增大的,造成上诉的主要原因是 其在异步转矩、永磁发电制动转矩、 矩起的磁阻转矩和单轴转由转子磁路不对称而引等一系列的因素共同作用下而引起的,所以在这个过程中转速是振荡着上升的。在起 动过程中,质的转矩,只有异步转矩是驱动性电动机就是以这转矩来得以加速的,其 他的转矩大部分以制动性质为主。在电动机的速度由零增加到接近定子的磁场旋转转速时,在永磁体脉振转矩的影响下永磁同步电机的转速有可能会超过同步转速,而出现转速的超调现象。但经过一段时间的转速振荡后,最终在同步转矩的作用下而被牵入同步。 1.2永磁同步电机的结构 永磁同步电机主要是由转子、端盖、及定子等各部件组成的。一般来说,永磁同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常非常的相似,主要是区别于转子的独特的结构与其它电机形成了差别。和常用的异步电机的最大不同则是转子的独特的结构,在转子上放有高质量的永磁体磁极。由于在转子上安放永磁体的位置有很多选择,所以永磁同步电机通常会被分为三大类:内嵌式、面贴式以及插入式,如图1.1所示。永磁同步电机的运行性能是最受关注的,影响其性能的因素有很多,但是最主要的则是永磁同步电机的结构。就面贴式、插入式和嵌入式而言,各种结构都各有其各自的优点。
7.2.2 直流电动机工作原理与结构 图7-4 直流电动机模型 图7-4是一个最简单的直流电动机模型。在一对静止的磁极N和S之间,装设一个可以绕Z-Z'轴而转动的圆柱形铁芯,在它上面装有矩形的线圈abcd。这个转动的部分通常叫做电枢。线圈的两端a和d分别接到叫做换向片的两个半圆形铜环1和2上。换向片1和2之间是彼此绝缘的,它们和电枢装在同一根轴上,可随电枢一起转动。A和B是两个固定不动的碳质电刷,它们和换向片之间是滑动接触的。来自直流电源的电流就是通过电刷和换向片流到电枢的线圈里。
图7-5 换向器在直流电机中的作用 当电刷A和B分别与直流电源的正极和负极接通时,电流从电刷A流入,而从电刷B流出。这时线圈中的电流方向是从a流向b,再从c流向d。我们知道,载流导体在磁场中要受到电磁力,其方向由左手定则来决定。当电枢在图7-5(a)所示的位置时,线圈ab边的电流从a流向b,用表示,cd边的电流从c流向d,用⊙表示。根据左手定则可以判断出,ab边受力的方向是从右向左,而cd边受力的方向是从左向右。这样,在电枢上就产生了反时针方向的转矩,因此电枢就将沿着反时针方向转动起来。 当电枢转到使线圈的ab边从N极下面进入S极,而cd边从S极下面进入N极时,与线圈a端联接的换向片1跟电刷B接触,而与线圈d端联接的换向片2跟电刷A接触,如图7-5(b)所示。这样,线圈内的电流方向变为从d流向c,再从b流向a,从而保持在N极下面的导体中的电流方向不变。因此转矩的方向也不改变,电枢仍然按照原来的反时针方向继续旋转。由此可以看出,换向片和电刷在直流电机中起着改换电枢线圈中电流方向的作用。
二相三相轮流导通星形三相十二状态 无刷直流永磁电动机工作原理 模型仍然采用星形连接的ABC三组线圈进行励磁,图1是星形接法线圈与电子换向器的连接图,由换向器中六个开关晶体管BG1至BG6组成的桥式电路切换通过ABC三个线圈的电流。例如BG1与BG5导通时电流从A线圈流进B线圈流出;如果BG2与BG4与BG6导通时电流从B线圈流进从A线圈与C线圈并联流出。 新的模型由一个六凸极结构的内定子与两极永磁外转子组成,我们将通过这个模型来展示三个线圈电流的切换顺序,图2是六凸极结构的内定子。
图3是凸极上绕上励磁线圈的定子,线圈的绕向见图5 在定子外周有外转子,外转子有一对永磁体磁极,粘贴在外转子磁軛上,外转子可在定子外周自由旋转,见图4
图5是该模型的正视图,用来表演线圈磁场的切换与转子跟随转动的过程,在六个凸极上绕有线圈,由径向相对的凸极线圈组成一个线圈组,图中黄色的是A组线圈、绿色的是B组线圈、红色的是C组线圈,三个线圈组按星形连接,标有ABC三个字母的是三个线圈的输入端。在外转子磁軛内贴有圆弧状永磁体磁极,蓝色的是N极朝轴心、红色的是S极朝轴心。图5右边是内定子磁场方向箭头,在下面的磁场随开关切换流程图中将附在内定子上旋转,代表定子产生的磁场方向。以此图作动画来演示线圈磁场的切换与转子跟随转动的过程。 根据图1的星形接法线圈与电子换向器的连接图与下面动画的截图来说明开关晶体管是如何控制产生旋转的磁场,图中标注的“红色A+、B+、C+”表示相应线圈与电源正极接通,“蓝色A-、B-、C-”表示相应线圈与电源负极接通。 当开关管BG1、BG5、BG6导通时,电流由A组线圈进B组、C组线圈出,形成的磁场方向向下,规定此时的磁场方向为0度、转子旋转角度为0,见图6左。 当开关管BG1与BG5导通时,电流由A组线圈进B组线圈出,形成的磁场方向顺时针转到30度,转子也随之转到30度,见图6中。 当转子转到30度时,开关管BG1、BG3、BG5导通时,电流由A组与C组线圈进B组线圈出,形成的磁场方向顺时针转到60度,转子也随之转到60度,见图6右。
电动机的基本结构及工作原理 交流电机分异步电机和同步电机两大类。异步电机一般作电动机使用,拖动各种生产机械作功。同步电机分分为同步发电机和同步电动机两类。根据使用电源不同,异步电机可分为三相和单相两种型式。 一、异步电动机的基本结构 三相异步电动机由定子和转子两部分组成。因转子结构不同又可分为三相笼型和绕线式电机。 1、三相异步电动机的定子: 定子主要由定子铁心、定子绕组和机座三部分组成。定子的作用是通入三相对称交流电后产生旋转磁场以驱动转子旋转。定子铁心是电动机磁路的一部分,为减少铁心损耗,一般由0.35~0.5mm厚的导磁性能较好的硅钢片叠成圆筒形状,安装在机座内。定子绕组是电动机的电路部分,安嵌安在定子铁心的内圆槽内。定子绕组分单层和双层两种。一般小型异步电机采用单层绕组。大中型异步电动机采用双层绕组。机座是电动机的外壳和支架,用来固定和支撑定子铁心和端盖。 电机的定子绕组一般采用漆包线绕制而成,分三组分布在定子铁心槽内(每组间隔120O),构成对称的三相绕组。三相绕组有6个出线端,其首尾分别用U1、U2;V1、V2;W1、W2表示,连接在电机机壳上的接线盒中,一般3KW以下的电机采用星形接法(Y接),3KW以上的电机采用三角形接法(△接)。当通入电机定子的三相交流电相序改变后,因定子的旋转磁场方向改变,所以电机的转子旋转方向也改变。 2、三相异步电动机的转子:
转子主要由转子铁心、转子绕组和转轴三部分组成。转子的作用是产生感应电动势和感应电流,形成电磁转矩,实现机电能量的转换,从而带动负载机械转动。转子铁心和定子、气隙一起构成电动机的磁路部分。转子铁心也用硅钢片叠压而成,压装在转轴上。气隙是电动机磁路的一部分,它是决定电动机运行质量的一个重要因素。气隙过大将会使励磁电流增大,功率因数降低,电动机的性能变坏;气隙过小,则会使运行时转子铁心和定子铁心发生碰撞。一般中小型三相异步电动机的气隙为0.2~1.0mm,大型三相异步电动机的气隙为1.0~1.5mm。 三相异步电动机的转子绕组结构型式不同,可分为笼型转子和绕线转子两种。笼型转子绕组由嵌在转子铁心槽内的裸导条(铜条或铝条)组成。导条两端分别焊接在两个短接的端环上,形成一个整体。如去掉转子铁心,整个绕组的外形就像一个笼子,由此而得名。中小型电动机的笼型转子一般都采用铸铝转子,即把熔化了的铝浇铸在转子槽内而形成笼型。大型电动机采用铜导条;绕线转子绕组与定子绕组相似,由嵌放在转子铁心槽内的三相对称绕组构成,绕组作星形形联结,三个绕组的尾端连结在一起,三个首端分别接在固定在转轴上且彼此绝缘的三个铜制集电环上,通过电刷与外电路的可变电阻相连,用于起动或调速。 3、三相异步电动机的铭牌: 每台电动机上都有一块铭牌,上面标注了电动机的额定值和基本技术数据。铭牌上的额定值与有关技术数据是正确选择、使用和检修电动机的依据。下面对铭牌中和各数据加以说明: 型号异步电动机的型号主要包括产品代号、设计序号、规格代号和特殊环境代号等。产品代号表示电动机的类型,用汉语拼音大写字母表示;设
. 无刷直流永磁电动机设计实例 一.主要技术指标 1.额定功率:P N30W 2.额定电压:U N 48,直流 V 3.额定电流:I N1A 3.额定转速:n N10000r/min 4.工作状态:短期运行 5.设计方式:按方波设计 6.外形尺寸:0.0360.065m 二.主要尺寸的确定 1.预取效率0.63、 2.计算功率P i 直流电动机 ' K m P N0.8530 P i40.48W,按陈世坤书。 N 0.63 长期运行 1 2 PN Pi 3 短期运行 1 3 PN Pi 4 3.预取线负荷A s'11000A/m 4.预取气隙磁感应强度B'0.55T 5. 预取计算极弧系数i0.8 6.预取长径比(L/D)λ′=2
Word资料
. 7.计算电枢内径 6.1P i 6.1 40.48 10 2 m D i13 3 1.37 i A s B n N 0.811000 0.55 210000 根据计算电枢内径取电枢内径值D i1 1.4 102 m 8. 气隙长度 0.7 103 m 9. 电枢外径D 1 2.95 102m 10. 极对数p=1 11.计算电枢铁芯长 L D i1 2 1.4 102 2.8 102 m 根据计算电枢铁芯长取电枢铁芯长 L= 2.8102 m 12. 极距 Di13.14 1.410 2 2 m 2p 2 2.2 10 13. 输入永磁体轴向长L m L 2.8102 m 三.定子结构 1. 齿数 Z=6 2. 齿距 D i1 3.141.410 2 10 2 m t 6 0.733 z 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: b t tB 0.733 102 0.55 0.294 10 2 m ,B t 可由 B t K Fe 1.430.96 设计者经验得 1.43T ,b t 由工艺取0.295102 m 5. 预估轭高: h j1 a i B 2.2 0.8 0.55 0.32310 2 m 2lB j1K Fe 2KFeBj1 2 0.96 1.56
第一章永磁同步电机的原理及结构 永磁同步电机的基本工作原理 永磁同步电机的原理如下在电动机的定子绕组中通入三相电流,在通入电流后就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会带动转子进行旋转,最终达到转子的旋转速度与定子中产生的旋转磁极的转速相等,所以可以把永磁同步电机的起动过程看成是由异步启动阶段和牵入同步阶段组成的。在异步启动的研究阶段中,电动机的转速是从零开始逐渐增大的,造成上诉的主要原因是其在异步转矩、永磁发电制动转矩、由转子磁路不对称而引起的磁阻转矩和单轴转矩等一系列的因素共同作用下而引起的,所以在这个过程中转速是振荡着上升的。在起动过程中,只有异步转矩是驱动性质的转矩,电动机就是以这转矩来得以加速的,其他的转矩大部分以制动性质为主。在电动机的速度由零增加到接近定子的磁场旋转转速时,在永磁体脉振转矩的影响下永磁同步电机的转速有可能会超过同步转速,而出现转速的超调现象。但经过一段时间的转速振荡后,最终在同步转矩的作用下而被牵入同步。 永磁同步电机的结构 永磁同步电机主要是由转子、端盖、及定子等各部件组成的。一般来说,永磁同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常非常的相似,主要是区别于转子的独特的结构与其它电机形成了差别。和常用的异步电机的最大不同则是转子的独特的结构,在转子上放有高质量的永磁体磁极。由于在转子上安放永磁体的位置有很多选择,所以永磁同步电机通常会被分为三大类:内嵌式、面贴式以及插入式,如图所示。永磁同步电机的运行性能是最受关注的,影响其性能的因素有很多,但是最主要的则是永磁同步电机的结构。就面贴式、插入式和嵌入式而言,各种结构都各有其各自的优点。
┉┉ ! 专题讲座"#$%&"’()*"#+,-$’*+# 2006年第4期┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉┉ """""" " """"""" " "" """ """ "" """ """ " "" """ """ """ 无刷直流电动机的设计( """ """" "" """" "" " """ "" """"")42 无刷直流电动机的设计() 叶金虎(中国电子科技集团公司第二十一研究所,上海200233)The Design of Brushless DC Motor ()YE Jin -hu (No.21Research Institute under CETC ,Shanghai 200233,China ) 中图分类号: TM381 文献标识码:A 文章编号:1004-7018(2006)04-0042-018.2.4永磁体的稳定方法 由永磁体本身的特性可知,永磁体的去磁曲线仅表明当外部的去磁磁场强度单方向从零变化到 H c 值时, 永磁体内部磁场强度H m 和磁通密度B m 之间的关系。一旦在去磁曲线上某一点去掉外部的强迫去磁磁场强度后, 永磁体内部的磁状态就不会沿着去磁曲线向上移动,而只能沿回复直线向上移动。一台新装配好的永磁电动机,充磁以后的原始磁状态处在图39中的A 点上。在电动机运行时,转图39 去磁磁场变化时的磁铁工作图子永磁体将会受到电枢反应 磁场的去磁作用,使电动机的磁状态发生变化, 永磁体的工作点将随着电枢反应的增磁或去磁作用在某一回复直线 K 1A 1上移动。如果电动机在另一次运行时, 经受了比上次大的去磁作用,这时永磁体的 工作点将在另一条回复直线K 2A 2上移动。由此可 见,电动机的运行特性将会随着负载的变化而变化,表现为性能不稳定,这是我们所不希望的。为此,在电动机正式投入运行以前,必须让电动机经受它在 按照技术条件运行的整个过程中, 可能遇到的最大去磁作用,从而保证它的运行性能不会再随着负载的变化而变化。我们把所采取的这种措施称为“稳定”,通常采用的方法有下面几种: (1)空气稳定 永磁体转子在装入定子以前,图40 空气稳定时 的磁铁工作图预先给以充磁,并使永磁体达到饱和状态。然后,不要给充好磁的转子永磁体加保护性 的磁短路环, 而让其自由地处于空气中。这时,永磁体本身的磁状态 (Φ0,AW 0)由直线OC 与去磁曲线的交点C 来决定,如图40所示。直线OC 是永磁体转子自由地处于空气中时,其永磁体的外磁路的等效磁导线。有时亦称它为自由状态时的漏磁导线。C 点是回复直线的起始点。我们把这种稳磁方法叫做空气稳定,或者称之谓自由状态的稳定。在设计采用空气稳定的电动机时,当磁路系统的尺寸决定之后,必须求出转子永磁体在空气中的等效磁导∧c ,从而决定回复直线的起始点。用这种方法稳定的电动机,制造和维修方便,但永磁体利用差,电动机的重量较重和体积较大。(2)起动稳定 永磁体转子在装入定子以后得图41 起动稳定时的磁铁工作图 进行充磁,并使永磁体达到饱和状态,此时永磁体的磁状态由图41中的A 点来确定。然后,电动机在额定工作电压和额定负载条件下起动,永磁体的工作点将沿去磁曲线下降到K 点。随着起动过程的结束,电动机将在 额定状态下运行,永磁体的工作点移到负载工作点H ,其磁状态由H 点确定。在设计采用起动稳定的永磁电动机时,当主要尺寸确定之后,必须选定磁路系统和电路系统,对应某一电枢绕组和电子换向线路,就可以计算出起动电流I st 和起动时电枢反应直轴去磁磁势AW adK 的数值,从而决定回复直线起始点K 的位置,以及负载工作点H 和空载工作点P 的位置。据此可校验所选磁路和电路是否合适,并在此基础上进行适当调整,以便尽量使永磁体能工作在最佳工作点上。(3)突然反转稳定 当技术指标中对电动机有正反转要求时,永磁体的稳定要采用突然反转的方法。对于无刷直流电动机,由于电路系统中电子换向线路导通顺序的不同,它在突然反转时情况较为复杂。现在以星形三相电枢绕组与非桥式电子换向线路的组合为例进行分析。电动机正向旋转时(顺时针方向),定子绕组导通顺序为U #V #W ;反向旋转时(逆时针方向),定子绕组导通顺序为U #W #V 。(下转第46页)
无刷直流电动机简介和基本工作原理 无刷直流电动机简介和基本工作原理 无刷直流电动机简介 直流无刷电机 :又称“无换向器电机交一直一交系统”或“直交系统” 。是将交流电源整流后变成直流, 再由逆变器转换成 频率可调的交流电,但是,注意此处逆变器是工作在直流斩波方式。 无刷直流电动机Brushless Direct Current Motor ,BLDC,采用方波自控式永磁同步电机,以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料;产品性能超越传统直流电机的所有优点,同时又解决了直流电机碳刷滑环的缺点,数字式控 制,是当今最理想的调速电机。 无刷直流电动机具有上述的三高特性,非常适合使用在24小时连续运转的产业机械及空调冷冻主机、风机水泵、空气压缩机负载;低速高转矩及高频繁正反转不发热的特性,更适合应用于机床工作母机及牵引电机的驱动;其稳速运转精度比直流有刷电机更高,比矢量控制或直接转矩控制速度闭环的变频驱动还要高,性能价格比更好,是现代化调速驱动的最佳 选择。 基本工作原理 无刷直流电动机由同步电动机和驱动器组成,是一种典型的机电一体化产品。同步电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。而转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速 度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始
无刷直流电动机硬件设计 3.1 逆变主电路设计 3.1.1 功率开关主电路 图3-1 功率开关主电路原理图 逆变器将直流电转换成交流电向电机供电。与一般逆变器不同,它的输出频率不是独立调节的,而是受控于转子位置信号,是一个“自控式逆变器”。由于采用自控式逆变器,无刷直流电动机输入电流的频率和电机转速始终保持同步,电机和逆变器不会产生振荡和失步,这也是无刷直流电动机的重要优点之一。 3.1.2 逆变开关元件选择和计算 MOSFET在1960年由贝尔实验室(Bell Lab.)的D. Kahng和 Martin Atalla 首次实验成功,这种元件的操作原理和1947年萧克莱(William Shockley)等人发明的双载子晶体管(Bipolar Junction Transistor, BJT)截然不同,且因为制造成本低廉与使用面积较小、高整合度的优势,在大型积体电路(Large-Scale Integrated Circuits, LSI)或是超大型积体电路(Very Large-Scale Integrated Circuits, VLSI)的领域里,重要性远超过BJT。 近年来由于MOSFET元件的性能逐渐提升,除了传统上应用于诸如微处理器、微控制器等数位讯号处理的场合上,也有越来越多类比讯号处理的积体电路可以用MOSFET来实现。 表3-1对IGBT、GTR、GTO 和电力MOSFET的优缺点的比较 器件优点缺点
IGBT 开关速度高,开关损耗小,具有耐脉冲电流冲击的能力,通态压降较低,输入阻抗高,为电压驱 动,驱动功率小 开关速度低于电力MOSFET,电压,电流容量 不及GTO GTR 耐压高,电流大,开关特性好,通流能力强,饱和压降低 开关速度低,为电流驱动,所需驱动功率大,驱 动电路复杂,存在二次击 穿问题 GTO 电压、电流容量大,适用 于大功率场合,具有电导 调制效应,其通流能力很 强 电流关断增益很小,关断时门极负脉冲电流大,开关速度低,驱动功率大,驱动电路复杂,开关频率 低 电 力 MOSFET 开关速度快,输入阻抗高,热稳定性好,所需驱动功率小且驱动电路简单,工作频率高,不存在 二次击穿问题 电流容量小,耐压低,一般只适用于功率不超过 10kW 的电力电子装置 通过上述的比较,我选择MOSFET 。 电枢额定电流I aH =8.5A ,因为每个控制元件导通120o ,所以控制元件的峰值电 流可以由以下方程算出。 2/3018.52Idt ππ =?,通过计算可得I=25.5A , 额定电压U H =36V ,峰值电压应有一个百分之40的余量所以 U M =U H *1.4=36*1.4=50.4V 通过以上计算,可得出选择的MOSFET 峰值电流为25A,峰值电压为50V 。 3.2 逆变开关管驱动电路设计 3.2.1 IR2110功能介绍 (1) IR2110的特点有:输出驱动隔离电压可达500V ;芯片自身的门输入驱动范围为10~20V ;输入端带施密特触发电器;可实现两路分立的驱动输出,可驱 动高压高频器件,如IGBT 、功率MOSFET 等,且工作频率高可达500KHz ,开通、关断延迟小,分别为120ns 和94ns ;逻辑电源的输入范围(脚9)5~15V ,可方便的与TTL ,CMOS 电平相匹配。 (2) IR2110 主要功能及技术参数