
四倍频细分电路(含波形图)
时间:2010-06-12 05:00:19 来源:作者:
1.光电编码器原理
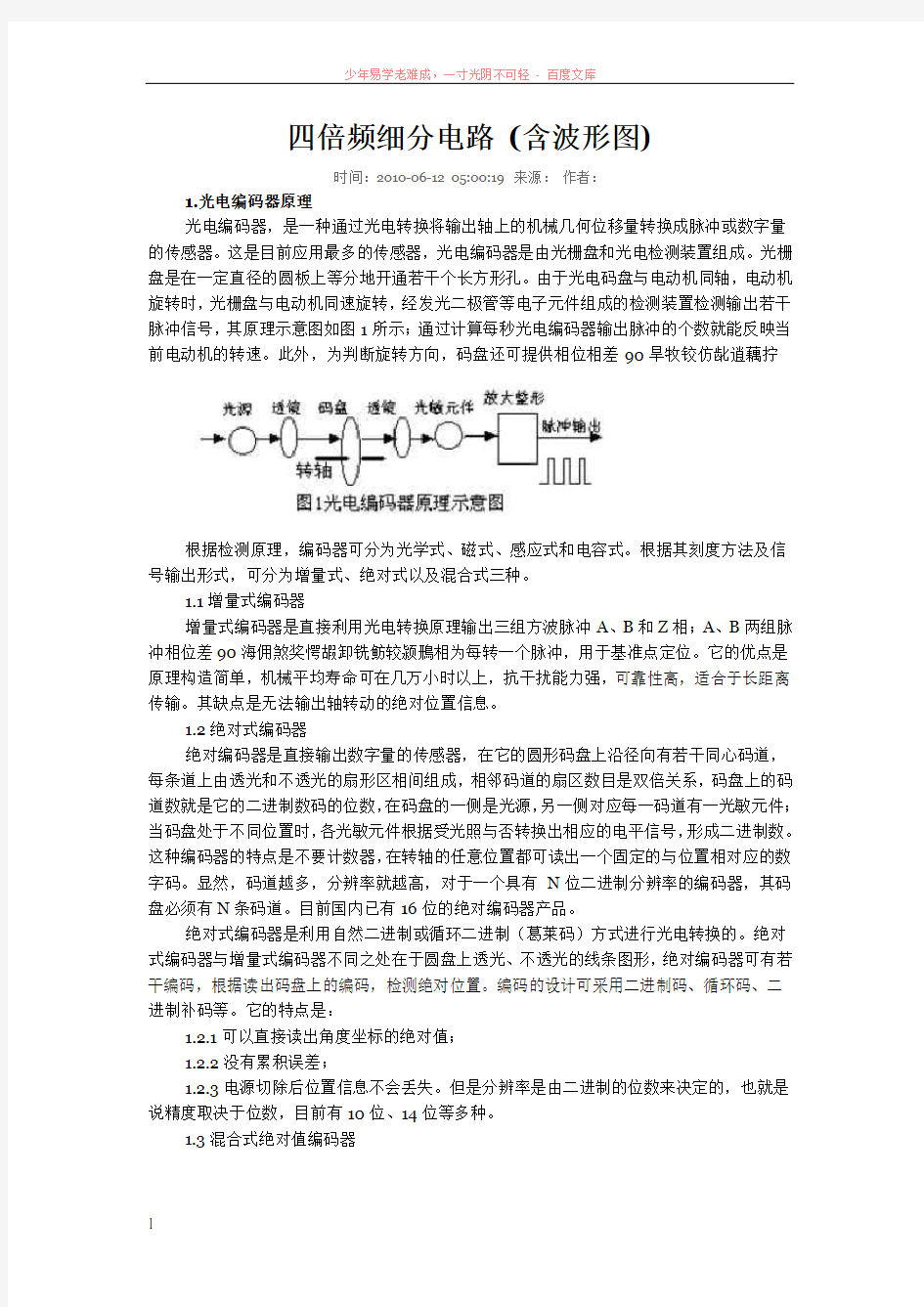
光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器
绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:
1.2.1可以直接读出角度坐标的绝对值;
1.2.2没有累积误差;
1.2.3电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。
1.3混合式绝对值编码器
混合式绝对值编码器,它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
光电编码器是一种角度(角速度)检测装置,它将输入给轴的角度量,利用光电转换原理转换成相应的电脉冲或数字量,具有体积小,精度高,工作可靠,接口数字化等优点。它广泛应用于数控机床、回转台、伺服传动、机器人、雷达、军事目标测定等需要检测角度的装置和设备中。
2. 光电编码器的应用电路
2.1 EPC-755A光电编码器的应用
EPC-755A光电编码器具备良好的使用性能,在角度测量、位移测量时抗干扰能力很强,并具有稳定可靠的输出脉冲信号,且该脉冲信号经计数后可得到被测量的数字信号。因此,我们在研制汽车驾驶模拟器时,对方向盘旋转角度的测量选用EPC-755A光电编码器作为传感器,其输出电路选用集电极开路型,输出分辨率选用360个脉冲/圈,考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号鉴相后才能计数。图2给出了光电编码器实际使用的鉴相与双向计数电路,鉴相电路用1个D触发器和2个与非门组成,计数电路用3片74LS193组成。
当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90埃珼触发器输出Q(波形W1)为高电平,Q(波形W2)为低电平,上面与非门打开,计数脉冲通过(波形W3),送至双向计数器74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门关闭,其输出为高电平(波形W4)。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形
延迟90埃珼触发器输出Q(波形W1)为低电平,Q(波形W2)为高电平,上面与非门关闭,其输出为高电平(波形W3);此时,下面与非门打开,计数脉冲通过(波形W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数。
汽车方向盘顺时针和逆时针旋转时,其最大旋转角度均为两圈半,选用分辨率为360个脉冲/圈的编码器,其最大输出脉冲数为900个;实际使用的计数电路用3片74LS193
组成,在系统上电初始化时,先对其进行复位(CLR信号),再将其初值设为800H,即2048(LD信号);如此,当方向盘顺时针旋转时,计数电路的输出范围为2048~2948,当方向盘逆时针旋转时,计数电路的输出范围为2048~1148;计数电路的数据输出D0~D11送至数据处理电路。
实际使用时,方向盘频繁地进行顺时针和逆时针转动,由于存在量化误差,工作较长一段时间后,方向盘回中时计数电路输出可能不是2048,而是有几个字的偏差;为解决这一问题,我们增加了一个方向盘回中检测电路,系统工作后,数据处理电路在模拟器处于非操作状态时,系统检测回中检测电路,若方向盘处于回中状态,而计数电路的数据输出不是2048,可对计数电路进行复位,并重新设置初值。
2.2 光电编码器在重力测量仪中的应用
采用旋转式光电编码器,把它的转轴与重力测量仪中补偿旋钮轴相连。重力测量仪中补偿旋钮的角位移量转化为某种电信号量;旋转式光电编码器分两种,绝对编码器和增量编码器。
增量编码器是以脉冲形式输出的传感器,其码盘比绝对编码器码盘要简单得多且分辨率更高。一般只需要三条码道,这里的码道实际上已不具有绝对编码器码道的意义,而是产生计数脉冲。它的码盘的外道和中间道有数目相同均匀分布的透光和不透光的扇形区(光栅),但是两道扇区相互错开半个区。当码盘转动时,它的输出信号是相位差为90暗腁相和B相脉冲信号以及只有一条透光狭缝的第三码道所产生的脉冲信号(它作为码盘的基准位置,给计数系统提供一个初始的零位信号)。从A,B两个输出信号的相位关系(超前或滞后)可判断旋转的方向。由图3(a)可见,当码盘正转时,A道脉冲波形比B道超前π/2,而反转时,A道脉冲比B道滞后π/2。图3(b)是一实际电路,用A道整形波的下沿触发单稳态产生的正脉冲与B道整形波相‘与’,当码盘正转时只有正向口脉冲输出,反之,只有逆向口脉冲输出。因此,增量编码器是根据输出脉冲源和脉冲计数来确定码盘的转动方向和相对角位移量。通常,若编码器有N个(码道)输出信号,其相位差为π/ N,可计数脉冲为2N倍光栅数,现在N=2。图3电路的缺点是有时会产生误记脉冲造成误差,这种情况出现在当某一道信号处于‘高’或‘低’电平状态,而另一道信号正处于‘高’和‘低’之间的往返变化状态,此时码盘虽然未产生位移,但是会产生单方向的输出脉冲。例如,码盘发生抖动或手动对准位置时(下面可以看到,在重力仪测量时就会有这种情况)。
图4是一个既能防止误脉冲又能提高分辨率的四倍频细分电路。在这里,采用了有记忆功能的D型触发器和时钟发生电路。由图4可见,每一道有两个D触发器串接,这样,在时钟脉冲的间隔中,两个Q端(如对应B道的74LS175的第2、7引脚)保持前两个时钟期的输入状态,若两者相同,则表示时钟间隔中无变化;否则,可以根据两者关系判断出它的变化方向,从而产生‘正向’或‘反向’输出脉冲。当某道由于振动在‘高’、‘低’间往复变化时,将交替产生‘正向’和‘反向’脉冲,这在对两个计数器取代数和时就可消除它们的影响(下面仪器的读数也将涉及这点)。由此可见,时钟发生器的频率应大于振动频率的可能最大值。由图4还可看出,在原一个脉冲信号的周期内,得到了四个计数脉冲。
电机正反转电路图
三相异步电动机接触器联锁的正反转控制的电气电子原理图如图3-4所示。线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB2和反转按钮SB3控制。这两个接触器的主触头所接通的电源相序不同,KM1按L1—L2—L3相序接线,KM2则对调了两相的相序。控制电路有两条,一条由按钮SB2和KM1线圈等组成的正转控制电路;另一条由按钮SB3和KM2线圈等组成的反转控制电路。
220v单相电机正反原理 单相电机不同于三相电机,三相电进入电机后,由于存在120°电角度,所以产生N S N S旋转磁场,推动转子旋转。而单相电进入电机后,产生不了N S N S磁场,所以加了一个启动绕组,启动绕组在定子内与工作绕组错开90°电角度排列,外接离心开关和启动电容后与工作绕组并联接入电源,又因为电容有阻直通交的作用,交流电通过电容时又滞后一个电角度,这样就人为地把进入电机的单相电又分出来一相,产生旋转磁场,推动转子旋转。反转时,只要把工作绕组或者启动绕组的两个接线对调一下就行,产生S N S N的磁场,电机就反转了。 网友完善的答案好评率:75% 单相电机的接线方法,是在副绕组中串联(不是并联)电容,再与主绕组并联接入电源;只要调换一下主绕组与副绕组的头尾并联接线,电机即反转 如果电机是3条出线的,其中一条是公共点!(分别与另外2条线的测电阻其值较小)接电源零线!然后把剩下的两条线并联电容,在电容的一端接220V电源相(火)线,就可以了!若要改变电机转向只要把220V电源相(火)线接在电容的另一端就可以了!
笼型电动机正反转的控制线路(电路图) 发布: | 作者: | 来源: jiasonghu | 查看:775次 | 用户关注: 接通电源让KMF--线圈通电其主触点闭合三相电源ABC分别通入电机三相绕组UVW,电动机正转。KMF线圈断电,主触点打开,电机停。让KMR线圈通电----其主触点闭合三相电源ABC通入电机三相绕组变为A—U未变,但B—W,C—V。电动→笼型电动机正反转的控制线路要使电动机给够实现反转,只要把接到电源的任意两根联线对调一头即可。为此用两个接触器来实现这一要求。设KMF为实现电机正转的接触器,KMR为实现电机反转的接触器。合上--S 笼型电动机正反转的控制线路 要使电动机给够实现反转,只要把接到电源的任意两根联线对调一头即可。为此用两个接触器来实现这一要求。 设 KMF 为实现电机正转的接触器, KMR 为实现电机反转的接触器。 接通电源→合上--S 让 KMF--线圈通电其主触点闭合 三相电源 ABC 分别通入电机三相绕组 UVW ,电动机正转。 KMF 线圈断电,主触点打开,电机停。 让 KMR 线圈通电----其主触点闭合 三相电源 ABC 通入电机三相绕组变 为 A — U 未变,但 B — W ,C — V。电动机将反转
实验一四位串行进位加法器的设计 一、实验目的 1.理解一位全加器的工作原理 2.掌握串行进位加法器的逻辑原理 3.进一步熟悉Quartus软件的使用,了解设计的全过程, 二、实验内容 1.采用VHDL语言设计四位串行进位的加法器 2.采用画原理图的方法设计四位串行进位加法器 三、实验步骤 1、使用VHDL语言设计 1.打开File—>New Project Wizard输入文件名adder4保存在D盘内,打开File—>New—>VHDL File,从模版中选择库的说明,use语句的说明,实体的说明,结构体的说明,编写VHDL代码,然后保存、编译。打开File—>New—>Other File—>Vector Waveform File,查找引脚,从Edit中选择End Time 输入40、ns 保存。从Assignments—>Settings—>Simulator Settings —>Functional 然后Processing—>Generate Functional Simnlation Netlist —>确定。选择Start Simulation保存最后的波形图,打开File —>close关闭工程。 底层文件: LIBRARY ieee;
USE fadder IS PORT ( a, b,cin : IN STD_LOGIC; s, co : OUT STD_LOGIC ); END fadder; ARCHITECTURE arc1 OF fadder IS BEGIN s<=a xor b xor cin; co<=((a xor b)and cin)or(a and b); END arc1; 顶层文件: LIBRARY ieee; USE adder4 IS PORT ( c0: IN STD_LOGIC; a,b : IN STD_LOGIC_VECTOR(3 DOWNTO 0); s : OUT STD_LOGIC_VECTOR(3 DOWNTO 0); c4 : OUT STD_LOGIC );
四倍频细分电路(含波形图) 时间:2010-06-12 05:00:19 来源:作者: 1.光电编码器原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 1.1增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 1.2绝对式编码器 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。 绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是: 1.2.1可以直接读出角度坐标的绝对值; 1.2.2没有累积误差; 1.2.3电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。 1.3混合式绝对值编码器
几种简单的函数信号发生器电路图分析 时间:2012-01-10 15:30 作者:赛微编辑来源:赛微电子网 引言 随着模拟电路技术和电力电子技术发展,电路设计中对信号的精度、稳定性、抗干扰能力等要求进一步提高,电子行业中将一些功能进行集成到IC芯片供其他的厂家来使用。在电路设计中,我们除了正常的电源输入之外,还需要提供三角波、方波、正弦波、脉冲波、单次脉冲等特殊的波形来给某个电路提供输入。 这种可以提供三角波、方波、正弦波、脉冲波、单次脉冲等特殊的波形的电路或者仪器(函数信号发生器的种类),我们可以称之为函数信号发生器,它对电子工程师设计的整个系统来说,发挥着重要的作用,它具有各种内置信号、自定义的任意波形和脉冲能力,能帮助您验证设计,检验新的构想,从而让整个设计更具有可靠性。 本文结合几种简单的函数信号发生器电路图,并对其工作原理(函数信号发生器原理)、可以实现的功能和性能、电路特点等方面做了详细的分析,供电子发烧友参考。 程控函数信号发生器电路图 它主要由主控制器LPC2114、MAX038、D/A转换器以及八选一模拟开关CD4051LED显示、键盘、波段切换,波形处理和峰值检波等部分组成,研究了LPC2114通过D/A转换器实现对MAX038频就绪和占空比的调控方法,并给出
了在0.1Hz~20MHz内产生精确的正弦波、方波和三角波的方法。此外,它还具有可调范围大、精度高、信号稳定等特点,可以应用于各种电子测量和控制场合。 LPC2114主要通过D/A转换器TLC5618、DAC0832和八选一模拟开关CD4051对MAX038输出的波形、频率以及占空比进行控制。通过对A1和A0端的不同设置来选择不同的波形。当A1为高电平、A0为任意时,输出波形为正弦波;当A1、A0同时为低电平时,输出波形为方波;当A1为低电平、A0为高电平时,输出波形为三角波。 MAX038输出波形的幅值为2 V(P-P),最大输出电流为+20 mA,输出阻抗的典型值为0.1 Ω。可直接驱动100 Ω的负载。为了得到更大的输出幅度和驱动能力,就需要对波形信号作进一步处理,下图为一个波形输出与驱动电路。
一、信号发生器电路安装与调试考核评分表 准考证号姓名规定时间分钟 开始时间结束时间实用时间得分 考核内容及要求配分评分标准扣分 1 元器件清点检查:在10分钟内对所有元 器件进行检测,并将不合格元器件筛选出来进 行更换,缺少的要求补发。 10 超时更换或要求补发按损坏 元件扣分,扣3分/个。 2 安装电路:按装配图进行装接,要求不装 错,不损坏元器件,无虚焊,漏焊和搭锡,元 器件排列整齐并符合工艺要求。 30 漏装,错装或虚焊、漏焊、 搭锡,扣2分/个,安装不整 齐和不符合工艺要求的扣1 分/处,损坏元件扣3分/个。 3 电源电路:接通交流电源,测量交流电压 和各直流电压+12V、-12V、V CC 、-5V。 信号发生器电路:接通+12V、-12V、V CC 、 -5V电源。测量函数信号波形:方波、正弦波、 三角波形。 20 电压测试方法不正确扣10 分,测量值有误差扣5分。 4 选择C=10uf,调节RW13、RW14、RW15, 记录方波的占空比: 1、 2、 3、 10 不会用示波观察输出信号波 形扣10分, 调节不正确扣5分, 波形记录不正确扣5分。 5 改变电容:100nf——100uf,并调节RW11, 记录正弦波输出频率f: 1、 2、 3、 10 最大不失真电压测试方法不 正确扣5分,测量值不准确 扣5分,不会计算最大不失 真功率扣5分。 6 调节RW21、RW22, 记录正弦波输出Vpp: 1、 2、 3、 10 不会测试功放电路的灵敏度 扣5分,不会计算电压放大 倍数扣5分。 7 调节电位器RW16、RW17, 记录正弦波形的失真: 1、 2、 3、 10 测量方法不正确扣5分, 测量数据每处2分,不会绘 制频响曲线扣5分 开始时间:结束时间:实用时间:
超前进位加法器原理 74283为4位超前进位加法器,不同于普通串行进位加法器由低到高逐级进位,超前进位加法器所有位数的进位大多数情况下同时产生,运算速度快,电路结构复杂。其管脚如图1所示: 图1 74283管脚图 其真值表如下所示: 表1 4位超前进位加法器真值表
由全加器的真值表可得S i 和C i 的逻辑表达式: 定义两个中间变量G i 和P i : 当A i =B i =1时,G i =1,由C i 的表达式可得C i =1,即产生进位,所以G i 称为产生量变。若P i =1,则A i ·B i =0,C i =C i-1 ,即P i =1时,低位的进位能传 送到高位的进位输出端,故P i 称为传输变量,这两个变量都与进位信号无关。 将G i 和P i 代入S i 和C i 得: 进而可得各位进位信号的逻辑表达如下:
根据逻辑表达式做出电路图如下: 逻辑功能图中有2输入异或门,2输入与门,3输入与门,4输入与门,2输入或门,3输入或门,4输入或门,其转化成CMOS晶体管图如下:
电路网表如下: *xor 2 .subckt xor2 a b c d f mxorpa 1 a vdd vdd pmos l=2 w=8 mxorpb f d 1 vdd pmos l=2 w=8 mxorpc 2 b vdd vdd pmos l=2 w=8 mxorpd f c 2 vdd pmos l=2 w=8 mxorna f a 3 0 nmos l=2 w=4 mxornb 3 b 0 0 nmos l=2 w=4 mxornc f c 4 0 nmos l=2 w=4 mxornd 4 d 0 0 nmos l=2 w=4 .ends xor2 *and2 .subckt and2 a b f mandpa f a vdd vdd pmos l=2 w=4 mandpb f b vdd vdd pmos l=2 w=4 mandna f a 1 0 nmos l=2 w=4 mandnb 1 b 0 0 nmos l=2 w=4 .ends and2 *and3 .subckt and3 a b c f mandpa f a vdd vdd pmos l=2 w=4 mandpb f b vdd vdd pmos l=2 w=4 mandpc f c vdd vdd pmos l=2 w=4 mandna f a 1 0 nmos l=2 w=6 mandnb 1 b 2 0 nmos l=2 w=6 mandnc 2 c 0 0 nmos l=2 w=6 .ends and3 *and4 .subckt and4 a b c d f mandpa f a vdd vdd pmos l=2 w=4 mandpb f b vdd vdd pmos l=2 w=4 mandpc f c vdd vdd pmos l=2 w=4 mandpd f d vdd vdd pmos l=2 w=4 mandna f a 1 0 nmos l=2 w=8 mandnb 1 b 2 0 nmos l=2 w=8 mandnc 2 c 3 0 nmos l=2 w=8 mandnd 3 d 0 0 nmos l=2 w=8 .ends and4
光电编码器原理课件
光电编码器 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90&or dm;的两路脉冲信号。 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。(REP) 1.1增量式编码器
增量式编码器是直接利用光电转换原理 输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90º,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 1.2绝对式编码器 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
光电编码器原理及应用电路 1、光电编码器原理 光电编码譌就星一种通过光电转换将输出轴上得机械几何位移量转换成脉冲或数字■得传感器?这就蹇目 前应用最多得传感器,光电编码器就是由光栅盘与光电检测装迓组成?光栅盘就是在一走臺径得?板上等 分地开通若干个长方形孔.由于光电码盘与电动机同轴,电动机旋转时「光栅盘与电动机同速旋车专,经发光二 极■等电子元件组成得检测装迓检测输出若干脉冲信号,其原理示总S 如ffi 1所示;通过计算每秒光电编码 器输出脉冲得个数就能反映当前电动机得转速.此外为判断旋转方向,码盘还可提供相位相差90度得脉 冲碍 图1光电编码S 原理示S 图 ffi 1光电缩码?原理示意? 根垢检测原理编码器可分为光学貳、磁式、感应式与电容式?根揣其刻度方法及信号输出形式,可分为增量 式、绝对式以及混合式三种. 1、1增量式编码器 ? ■式编码器就是妣利用光电转换原理输出三组方波脉冲A 、B 与Z 相;A 、B 两组脉冲相位差90度得 脉冲信号忆相为每转一个脉冲,用于墓准点走位.它得优点就是原理构适简单,机械平均寿命可在几万小时 以上抗干扰能力强「可靠性画适合于长距离传输?其缺点就麻法输出轴转动得绝对位琶信息? 1、2绝対式编码器 绝对竊码器就是厦接输出数字■得传感器,在它得圆形码盘上沿径向有若干同心码匾每条通上由透光与不 透光得扇形区相间组成,相邻码iS 得扇区数目就墨双倍关嬴码盘上得码通数就就墨它得二进制数码得位埶 在码盘得一侧就是光鴻另TW 对应每Fis 有Tess 元件;当码盘处于不同位迓时各光敏元件根据受光照 与否转换岀相应得电平信号■形成二进制数?这种扁码器得持原就超不耍计数器,在转轴得任倉位迓都可读 岀一个a 走得与位迓相対应得数字码?显然「码通越多■分辨率就越画对于一个典有N 位二进制分辨率得竊 码器,其码盘必须有N 条码通?目前国内已有16位得绝对编码?产品? 绝对式竊码器就是利用目然二进制或循环二逬制(葛莱码)方式进行光电转换^專?绝对式编码器与1?量式编 码器不同之处在于圆盘上透光.不透光得线条a 形,绝对編码器可有若干编码,根JB 读出码盘上得編码,检测 绝对位编码得设计可采用二iS 制码.循环码?二进制补码等?它得特原就是: 1、2、1可以車接读出角度坐标得绝対值; 1、2、2没有累积题 1、2、3电源切除后位迓信息不会丢失.但就垂分辨率就是由二进制得位数来决走得,也就就墨说精度取决 于位K 启前育10位、14位等多种? 1、3混合式绝对值媾码S 混合式绝対值编码器,它输出两组信息:一组信息用于检测磁极位迓滞有绝对信息功能;另一组则完全同堆量JUUI 丸溝迓饿?盘 先敏元作 转轴
1. 信号产生部分 1.1 频率控制字输入模块 library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; use ieee.std_logic_arith.all; entity ddsinput is port(a,b,c,clk,clr:in std_logic; q1,q2,q3,q4,q5:buffer unsigned(3 downto 0)); end ddsinput; architecture a of ddsinput is signal q:std_logic_vector(2 downto 0); begin q<=c&b&a; process(cp,q,clr) begin if clr='1'then q1<="0000";q2<="0000";q3<="0000";q4<="0000";q5<="0000"; elsif clk 'event and clk='1'then
DDS信号信号发生器电路设计 case q is when"001"=>q1<=q1+1; when"010"=>q2<=q2+1; when"011"=>q3<=q3+1; when"100"=>q4<=q4+1; when"101"=>q5<=q5+1; when others=>NULL; end case; end if; end process; end a; 1.2 相位累加器模块 library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; use ieee.std_logic_arith.all; entity xiangwei is port(m:in std_logic_vector(19 downto 0); clk,clr:in std_logic; data:out std_logic_vector(23 downto 0)); end xiangwei; architecture a of xiangwei is signal q:std_logic_vector(23 downto 0); begin process(clr,clk,m,q) begin if clr='1'then q<="000000000000000000000000"; elsif (clk'event and clk='1')then q<=q+m; end if; data<=q; end process; end a;
三相异步电动机正反转控制实物接线图导学案科目:电工技术班级:13高职机电课时:2 备课人:宋庆波备课时间:学生姓名: 学习目标: 1、知识目标:理解三相异步电动机正反转控制电路的工作过程,能绘制实物接线图。 2、能力目标:了解三相异步电动机正反转控制电路的类型,能按照控制要求自行设计或补画电动机正反转控制电路实物接线图,并会实物接线。 3、情感目标:通过复习及练习,培养学生对电气控制电路的学习兴趣。 重点: 难点: 知识复习: 补画三相异步电动机接触器联锁正反转控制电路原理图。 自主学习: 一、依据以上原理图将以下三相异步电动机接触器联锁正反转控制电路实物接线图补画完整。
二、某同学进行三相异步电动机双重联锁正反转控制电路的实训操作。 (1)试将图示的原理图补画完整。 (2)根据原理图,是将图示的控制电路实物接线图补画完整。 作业: 1、(1)画出单向异步电动机单向连续运转的电气原理图及实物接线图,要求:起 动按钮SB1,停止按钮SB2。 (2)说明按下SB1,电动机起动运转,按下SB2电动机不能停转的主要原因。 2.关于安装接线图绘制原则及安装工艺说法正确的是() A、所有电气设备和电气元件都按其所在的实际绘画位置绘制在图纸上。 B、控制电路的外部连接应使用接线端子板,也可不用端子板 C、一个电气元件接线端子上的连接导线只能一根 D、每节接线端子板上的连接导线不得多于两根 3.在电动机的正反转控制线路中,为了防止主触头熔焊而发生短路事故,应采用() A、接触器联锁 B、接触器自锁 C、按钮联锁 D、按钮自锁 4.具有过载保护的接触器联锁控制线路中,实现短路保护的电器是(),实现过载保护的电器是(),实现失、欠压保护的电器是() A、热继电器 B、接触器 C、熔断器 D、电源开关
实验一4位全加器的设计 一、实验目的: 1 熟悉QuartusⅡ与ModelSim的使用; 2 学会使用文本输入方式和原理图输入方式进行工程设计; 3 分别使用数据流、行为和结构化描述方法进行四位全加器的设计; 4 理解RTL视图和Technology Map视图的区别; 5 掌握简单的testbench文件的编写。 二、实验原理: 一个4位全加器可以由4个一位全加器构成,加法器间的进位可以串行方式实现,即将低位加法器的进位输出cout与相邻的高位加法器的进位输入信号cin相接。 三、实验内容: 1.QuartusII软件的熟悉 熟悉QuartusⅡ环境下原理图的设计方法和流程,可参考课本第4章的内容,重点掌握层次化的设计方法。 2.设计1位全加器原理图 设计的原理图如下所示:
VHDL源程序如下(行为描述):-- Quartus II VHDL Template -- Unsigned Adder library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity f_add is port ( a : in std_logic; b : in std_logic; ci : in std_logic; y : out std_logic; co : out std_logic ); end entity; architecture rtl of f_add is begin (co,y)<=('0',a)+('0',b)+('0',ci); end rtl;
绝对式光电编码器基本构造及特点 用增量式光电编码器有可能由于外界的干扰产生计数错误,并且在停电或故障停车后无 法找到事故前执行部件的正确位置。采用绝对式光电编码器可以避免上述缺点。绝对式光电编码器的基本原理及组成部件与增量式光电编码器基本相同,也是由光源、码盘、检测光栅、光电检测器件和转换电路组成。与增量式光电编码器不同的是,绝对式光电编码器用不同的数码来分别指示每个不同的增量位置,它是一种直接输出数字量的传感器。在它的圆形码盘上沿径向有若干同心码道,每条上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N 位 二进制分辨率的编码器,其码盘必须有N 条码道。绝对式光电编码器原理如图1-8 所示。 绝对式光电编码器是利用自然二进制、循环二进制(格雷码)、二-十进制等方式进行光 电转换的。绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。 图1-8 绝对式光电编码器原理 1.3.2 码制与码盘 绝对式光电编码器的码盘按照其所用的码制可以分为:二进制码、循环码(格雷码)、 十进制码、六十进制码(度、分、秒进制)码盘等。四位二元码盘(二进制、格雷码)如图1-9 所示。图中黑、白色分别表示透光、不透光区域。
一.课程设计的目的: 1、学习并了解MATLAB软件。 2、尝试用Simulink建模。 3、实现对数字电路的防真设计。 4、利用全加器电路创建四位二进制加法器。 二.课程设计题目描述及要求: 利用所学的数字电路的基本知识和MUTLAB软件中Simulink的应用学习,完成对数字电路的仿真设计。用各种各样的组合逻辑电路设计全加器,输出曲线,再利用全加器设计电路创建四位二进制加法器电路图,给出输出。 三.MATLAB软件简介: MATLAB是MathWorks公司于1984年推出的一套高性能的数值计算可视化软件,集数值分析、矩阵运算、信号处理和图形显示于一体。MATLAB是由Matrix 和Laboratory单词的前三个字母组合而成的,其含义是矩阵实验室。 Simulink是MATLAB最重要的组件之一,是实现动态系统建模、仿真的一个集成环境。它支持线性和非线性系统,连续时间、离散时间,或者两者的相结合的仿真,而且系统是多进程的。Simulink是从底层开发的一个完整的仿真环境和图形界面,它把MATLAB的许多功能都设计成一个个直观的功能模块,把需要的功能模块连接起来就可以实现所需要的仿真功能。Simulink仿真应用于数字电路、数字信号处理、通信仿真、电力系统仿真、宇航仿真等领域。由于数字系统中高低电平分别用0和1表示,因此数字电路问题往往可以转化为一个数字上的逻辑问题。MATLAB提供了逻辑运算模块和各种触发器模块,可以方便的进行数字电路的设计和仿真。借助于组合电路仿真常用模块Logic and Bit Operations子库中的Local Operator模块,将其拖到所建的untitled窗口中,然后鼠标左键双击该模块弹出的Block Parameters/Logical Operator对话框,按Operator栏后的黑三角来选择所需要的门电路标识符,如:AND、OR、NAND、NOR、XOR、NOT中的一个,并依次设置所需的输入、输出端子个数,之后按OK 键确定。利用这些基本门电路组成加法器逻辑电路。 四.课程设计的内容: 1、1位全加器的设计。 所谓全加器,就是带进位输入和进位输出的加法器。1位全加器有3个输入,分别是加
光电编码器 速度位置的数据在电机控制中起着非常重要的作用,其检测到的精确性能够直接影响电机控制的精度。速度的测量方法有多种,如感应式转速传感器、测速发电机、光电式转速传感器、霍尔转速传感器以及旋转变压器式转速传感器等。但目前调速系统速度以及位置反馈控制中应用较多的为光电编码器。 光电编码器是一种高精度的数字化检测仪器,是现代伺服系统广泛应用的角位移或者角速度的测量装置,它可以通过光电原理,将一个机械装置的角度或者位移量转化为电信号(数据串或者脉冲信号)。光电编码器可分为绝对式和增量式两种,其中,绝对式光电编码器具有输出信号与旋转信号对应的特点,但是精度欠缺,成本高;增量式光电编码器输出信号为脉冲信号,脉冲个数和相对旋转位移相关,与旋转的绝对位置无关,成本相对于绝对式更低,并且精度高、体积小、响应快、性能稳定等特点。如果预先设置一个基准位置,则可以利用增量式编码器完成绝对式编码器的功能,即也可以测出旋转的绝对位置。 实现绝对式编码器的功能,也即可以测出旋转的绝对位置。增量式光电编码器在高分辨率、大量程角速率、位移的测量中,它更具有优势。因而,在这个手指康复机器人系统中采用增量式光电编码器。 增量式光电编码器主要是由机械系统、数据扫描系统和电气系统三个部分组成。其中机械系统主要负责外壳和转动的支撑作用。电气系统的作用主要是保护、放大、抗干扰以及数据传输等等。 增量式光电脉冲编码器由光源、聚光镜、挡光板、码盘、检测光栅、光电检测器件和转换电路组成。 在光电码盘上刻度盘上均匀分布一定数量的光栅,光挡板(检测光栅)上刻有A、B相两组与光电码盘上光栅相对应的透光缝隙。增量式光电脉冲编码器工作时,光电码盘随着工作轴旋转,但是光挡板(检测光栅)保持不动。有光同时透过光电码盘和检测光栅时,电路中产生逻辑“1”信号,没有透光时产生逻辑“0”信号,从而产生了A、B两相的脉冲信号。由于检测光栅上的A、B相两个透光缝隙的节距与光电码盘上光栅的节距是一致的,并且这两组透光缝隙错开四分之一的节距,从而使得最终信号处理输出的信号存在90°的相位差。在大多数情况下,如若直接由编码器的光电检测器件获取信号,信号的电平较低,波形也不规则,不能适应于信号处理、控制和远距离传输的要求。所以,在编码器内还必须将此信号放大、整形。经过处理的输出信号近似于正弦波或者矩形波。由于矩形波输出信号易于进行数字处理,所以矩形信号输出在定位控制中得到广泛的应用。 正因为增量式光电编码器输出A、B 两相互差90°电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。
信号发生器的基本原理- 信号发生器使用攻略 信号发生器的基本原理 现代信号发生器的结构非常复杂,与早期的简易信号发生器天差地别,但总体基本结构功能单元还是类似的。信号发生器的主要部件有频率产生单元、调制单元、缓冲放大单元、衰减输出单元、显示单元、控制单元。早期的信号发生器都采用模拟电路,现代信号发生器越来越多地使用数字电路或单片机控制,内部电路结构上有了很大的变化。 频率产生单元是信号发生器的基础和核心。早期的高频信号发生器采用模拟电路LC振荡器,低频信号发生器则较多采用文氏电桥振荡器和RC移相振荡器。由于早期没有频率合成技术,所以上述LC、RC振荡器优点是结构简单,可以产生连续变化的频率,缺点是频率 稳定度不够高。早期产品为了提高信号发生器频率稳定度,在可变电容的精密调节方面下了很多功夫,不少产品都设计了精密的传动机构和指示机构,所以很多早期的高级信号发生器体积大、重量重。后来,人们发现采用石英晶体构成振荡电路,产生的频率稳定,但是石英晶体的频率是固定的,在没有频率合成的技术条件下,只能做成固定频率信号发生器。之后 也出现过压控振荡器,虽然频率稳定度比LC振荡器好些,但依然不够理想,不过压控振荡 器摆脱了LC振荡器的机械结构,可以大大缩减仪器的体积,同时电路不太复杂,成本也不高。现在一些低端的函数信号发生器依然采用这种方式。 随着PLL锁相环频率合成器电路的兴起,高档信号发生器纷纷采用频率合成技术,其 优点是频率输出稳定(频率合成器的参考基准频率由石英晶体产生),频率可以步进调节,频率显示机构可以用数字化显示或者直接设置。早期的高精度信号发生器为了得到较小的频率步进,将锁相环做得非常复杂,成本很高,体积和重量都很大。目前的中高端信号发生器 采用了更先进的DDS频率直接合成技术,具有频率输出稳定度高、频率合成范围宽、信号频谱纯净度高等优点。由于DDS芯片高度集成化,所以信号发生器的体积很小。 信号发生器的工作频率范围、频率稳定度、频率设置精度、相位噪声、信号频谱纯度都与频率产生单元有关,也是信号发生器性能的重要指标。 信号发生器的一大特性就是可以操控仪器输出信号的幅度,信号通过特定组合衰减量的衰减器达到预定的输出幅度。早期的衰减器是机械式的,通过刻度来读取衰减量或输出幅度。现代中高档信号发生器的衰减器单元由单片机控制继电器来切换,向电子芯片化过渡,衰减单元的衰减步进量不断缩小,精度相应提高。大频率范围的高精度衰减器和高精度信号输出属于高科技技术,这也是国内很少有企业能制造高端信号发生器的原因之一。信号发生器的信号输出范围和输出电平的精度和准确度也是标志信号发生器性能的重要指标。
双重联锁(按钮、接触器)正反转控制电路原理图 电机双重联锁正反转控制 一、线路的运用场合Array正反转控制运用生产机械要求运动部件 能向正反两个方向运动的场合。如机床工作 台电机的前进及后退控制;万能铣床主轴的 正反转控制;圈板机的辊子的正反转;电梯、 起重机的上升及下降控制等场所。 二、控制原理分析 (1)、控制功能分析: 怎样才能实现正反转控制?为什么要 实现联锁? 电机要实现正反转控制:将其电源的相 序中任意两相对调即可(简称换相),通常是 V相不变,将U相及W相对调,为了保证两 个接触器动作时能够可靠调换电动机的相 序,接线时应使接触器的上口接线保持一致, 在接触器的下口调相。。由于将两相相序对 调,故须确保2个KM线圈不能同时得电, 否则会发生严重的相间短路故障,因此必须 采取联锁。为安全起见,常采用按钮联锁(机 械)和接触器联锁(电气)的双重联锁正反 转控制线路(如原理图所示);使用了(机械) 按钮联锁,即使同时按下正反转按钮,调相 用的两接触器也不可能同时得电,机械上避 1 / 111 / 11
2 / 112 / 11 免了相间短路。另外,由于应用的(电气)接触器间的联锁,所以只要其中一个接触器得电,其长闭触点(串接在对方线圈的控制线路中)就不会闭合,这样在机械、电气双重联锁的应用下,电机的供电系统不可能相间短路,有效地保护的电机,同时也避免在调相时相间短路造成事故,烧坏接触器。 (2)、工作原理分析: A 、正转控制: 按下 SB1常闭触头先断开(对KM2实现联锁) SB1常开触头闭合 KM1线圈得电 KM1电机M 启动连续正转工作 KM1KM1联锁触头断开(对KM2实现联锁) B 、反转控制: M 失电,停止正转 SB2 按下 线圈得电 SB2 KM2 电机M 启动连续反转工作 KM2主触头闭合KM2联锁触头断开(对KM1实现联锁) C 、停止控制: 按下SB3,整个控制电路失电,接触器各触头复位,电机M 失电停转;
增量式光电编码器原理及其结构 增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。一般来说,增量式光电编码器输出A、B 两相互差90°电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的Z 相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。标志脉冲通常用来指示机械位置或对积累量清零。增量式光电编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成,如图1-1 所示。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期;检测光栅上刻有A、B 两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4 节距,使得光电检测器件输出的信号在相位上相差90°电度角。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差90°电度角的近似于正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测轴的转角或速度信息。增量式光电编码器输出信号波形如图1-2 所示。增量式光电编码器的优点是:原理构造简单、易于实现;机械平均寿命长,可达到几万小时以上;分辨率高;抗干扰能力较强,信号传输距离较长,可靠性较高。其缺点是它无法直接读出转动轴的绝对位置信息。 图 1-2 增量式光电编码器的输出信号波形 1.2.2 基本技术规格 在增量式光电编码器的使用过程中,对于其技术规格通常会提出不同的要求,其中最关 键的就是它的分辨率、精度、输出信号的稳定性、响应频率、信号输出形式。 (1)分辨率 光电编码器的分辨率是以编码器轴转动一周所产生的输出脉冲数来表示的,即脉冲数/转(PPR)。码盘上的透光缝隙的数目就等于编码器的分辨率,码盘上刻的缝隙越多, 编码器的分辨率就越高。在工业电气传动中,根据不同的应用对象,可选择分辨率通常在
实验8 序列信号发生器电路设计 一、实验目的: 1.熟悉序列信号发生器的工作原理。 2.学会序列信号发生器的设计方法。 3.熟悉掌握EDA软件工具Proteus 的设计仿真测试应用。 二、实验仪器设备: 仿真计算机及软件Proteus 。 74LS161、74LS194、74LS151 三、实验原理: 1、反馈移位型序列信号发生器 反馈移位型序列信号发生器的结构框图如右图 所示,它由移位寄存器和组合反馈网络组成, 从寄存器的某一输出端可以得到周期性的序列 码。设计按一下步骤进行: (1)确定位移寄存器位数n ,并确定移位 寄存器的M 个独立状态。 CP 将给定的序列码按照移位规律每 n 位一组,划分为M 个状态。 若M 个状态中出现重复现象,则应增加移位寄存器的位数。用n+1位再重复上述过程,直到划分为M 个独立状态为止。 (2)根据M 各不同状态列出寄存器的态序表和反馈函数表,求出反馈函数F 的表达式。 (3)检查自启动性能。 (4)画逻辑图。 2、计数型序列信号发生器 计数型序列信号发生器和组合的结构框图 如图 所示。它由计数器和组合输出网络两部分 组成,序列码从组合输出网络输出。设计 过程分为以下两步: (1)根据序列码的长度M 设计模M (2)按计数器的状态转移关系和序列码的要求组合输出网络。由于计数器的状态设置和输出序列没有直接关系,因此这种结构对于输出序列的更改比较方便,而且还能产生多组序列码。 四、计算机仿真实验内容及步骤、结果: 1、设计一个产生100111序列的反馈移位型序列信号发生器。 1、根据电路图在protuse 中搭建电路图
光电编码器的原理及应用 2008-09-02 22:51 一、光电编码器的工作原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90o的两路脉冲信号。 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 (一)增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 (二)绝对式编码器 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。 绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是: 1.可以直接读出角度坐标的绝对值; 2.没有累积误差; 3.电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,