1、现象、问题描述
对外开局或调试过程中经常会碰到EC无法控制云台的问题,软件界面下发命令,云台没有丝毫响应,或者响应不灵敏,每次都要花费大量时间定位。下面就此类问题定位方法作个小结。
2、云台问题定位方法
方法一:检查接线,云台控制线AB线是否接反,波特率、地址码、云台协议是否设置正确。波特率、地址码、云台协议(通常是Pelco_D或Pelco_P)通过云台内部控制电路板上的拨码开关设置,一般需要拆开云台,云台用户手册有详细图示说明。还有一个简单的方法云台上电自检时会通过视频显示自身的这些参数。我司软件界面上需要与其配置一致。
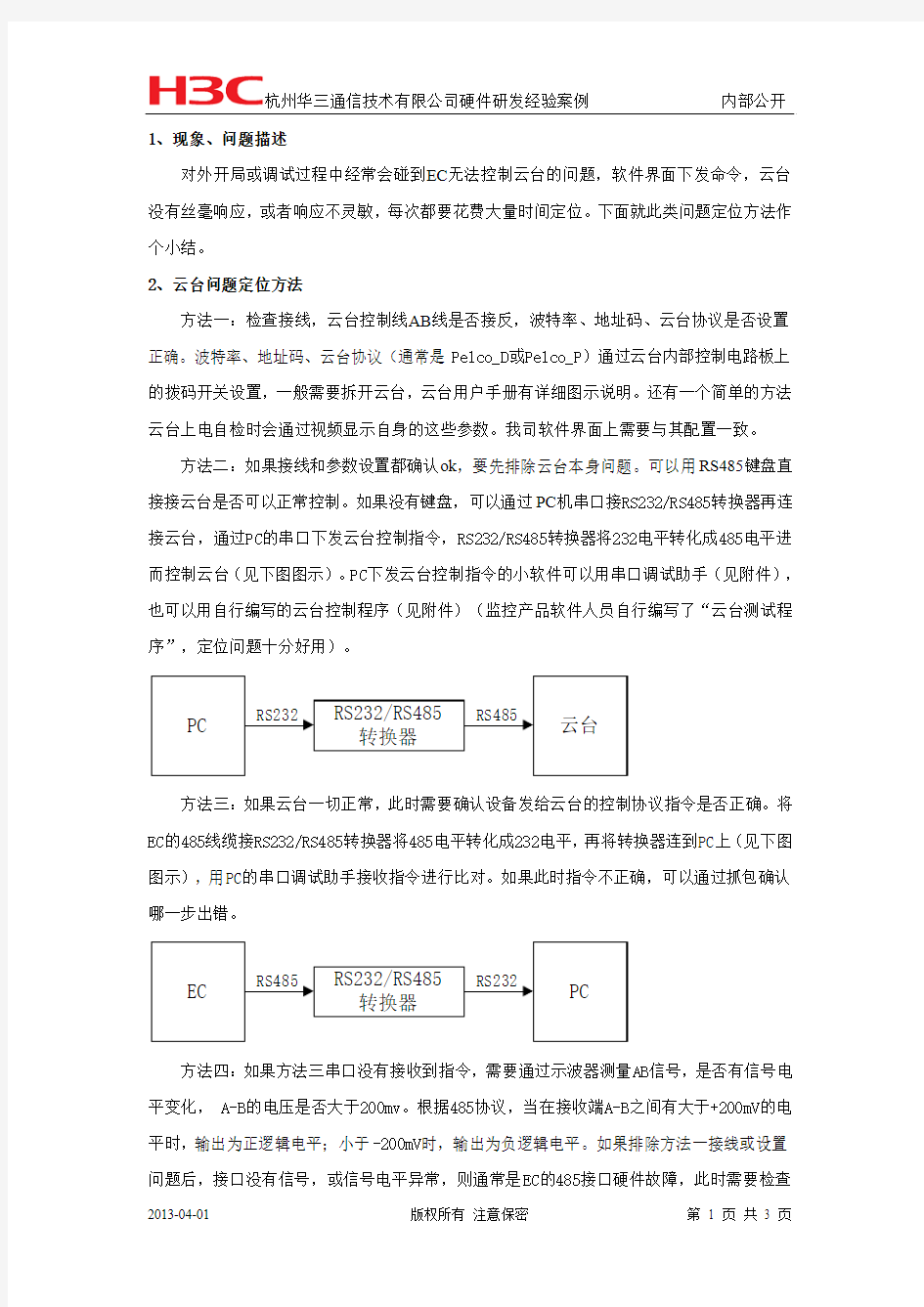
方法二:如果接线和参数设置都确认ok,要先排除云台本身问题。可以用RS485键盘直接接云台是否可以正常控制。如果没有键盘,可以通过PC机串口接RS232/RS485转换器再连接云台,通过PC的串口下发云台控制指令,RS232/RS485转换器将232电平转化成485电平进而控制云台(见下图图示)。PC下发云台控制指令的小软件可以用串口调试助手(见附件),也可以用自行编写的云台控制程序(见附件)(监控产品软件人员自行编写了“云台测试程序”,定位问题十分好用)。
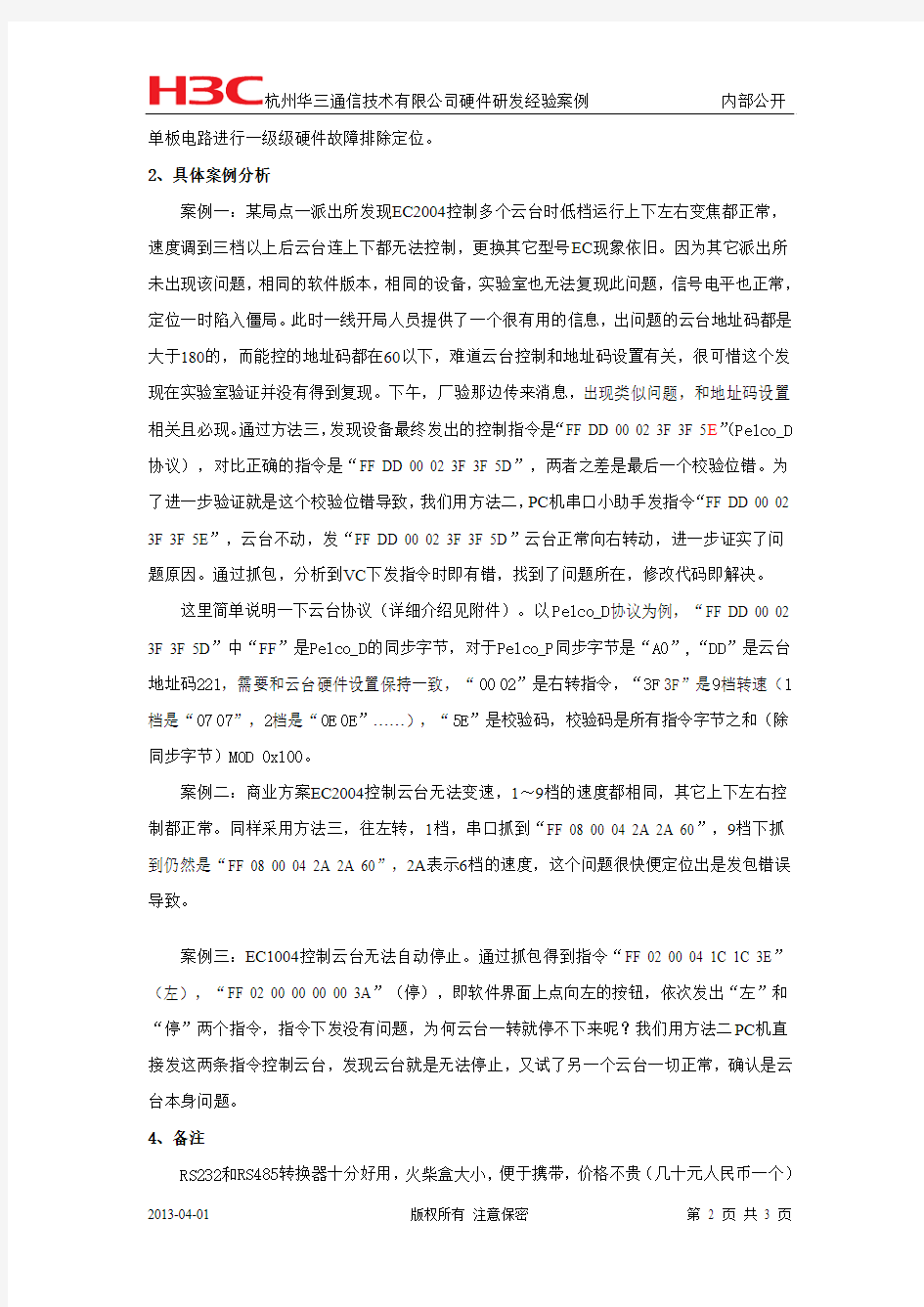
方法三:如果云台一切正常,此时需要确认设备发给云台的控制协议指令是否正确。将EC的485线缆接RS232/RS485转换器将485电平转化成232电平,再将转换器连到PC上(见下图图示),用PC的串口调试助手接收指令进行比对。如果此时指令不正确,可以通过抓包确认哪一步出错。
方法四:如果方法三串口没有接收到指令,需要通过示波器测量AB信号,是否有信号电平变化, A-B的电压是否大于200mv。根据485协议,当在接收端A-B之间有大于+200mV的电平时,输出为正逻辑电平;小于-200mV时,输出为负逻辑电平。如果排除方法一接线或设置问题后,接口没有信号,或信号电平异常,则通常是EC的485接口硬件故障,此时需要检查
单板电路进行一级级硬件故障排除定位。
2、具体案例分析
案例一:某局点一派出所发现EC2004控制多个云台时低档运行上下左右变焦都正常,速度调到三档以上后云台连上下都无法控制,更换其它型号EC现象依旧。因为其它派出所未出现该问题,相同的软件版本,相同的设备,实验室也无法复现此问题,信号电平也正常,定位一时陷入僵局。此时一线开局人员提供了一个很有用的信息,出问题的云台地址码都是大于180的,而能控的地址码都在60以下,难道云台控制和地址码设置有关,很可惜这个发现在实验室验证并没有得到复现。下午,厂验那边传来消息,出现类似问题,和地址码设置相关且必现。通过方法三,发现设备最终发出的控制指令是“FF DD 00 02 3F 3F 5E”(Pelco_D 协议),对比正确的指令是“FF DD 00 02 3F 3F 5D”,两者之差是最后一个校验位错。为了进一步验证就是这个校验位错导致,我们用方法二,PC机串口小助手发指令“FF DD 00 02 3F 3F 5E”,云台不动,发“FF DD 00 02 3F 3F 5D”云台正常向右转动,进一步证实了问题原因。通过抓包,分析到VC下发指令时即有错,找到了问题所在,修改代码即解决。
这里简单说明一下云台协议(详细介绍见附件)。以Pelco_D协议为例,“FF DD 00 02 3F 3F 5D”中“FF”是Pelco_D的同步字节,对于Pelco_P同步字节是“A0”,“DD”是云台地址码221,需要和云台硬件设置保持一致,“00 02”是右转指令,“3F 3F”是9档转速(1档是“07 07”,2档是“0E 0E”……),“5E”是校验码,校验码是所有指令字节之和(除同步字节)MOD 0x100。
案例二:商业方案EC2004控制云台无法变速,1~9档的速度都相同,其它上下左右控制都正常。同样采用方法三,往左转,1档,串口抓到“FF 08 00 04 2A 2A 60”,9档下抓到仍然是“FF 08 00 04 2A 2A 60”,2A表示6档的速度,这个问题很快便定位出是发包错误导致。
案例三:EC1004控制云台无法自动停止。通过抓包得到指令“FF 02 00 04 1C 1C 3E”(左),“FF 02 00 00 00 00 3A”(停),即软件界面上点向左的按钮,依次发出“左”和“停”两个指令,指令下发没有问题,为何云台一转就停不下来呢?我们用方法二PC机直接发这两条指令控制云台,发现云台就是无法停止,又试了另一个云台一切正常,确认是云台本身问题。
4、备注
RS232和RS485转换器十分好用,火柴盒大小,便于携带,价格不贵(几十元人民币一个)
建议对外维护人员配一个,对定位云台或键盘控制等RS485问题十分方便。
5、附录
IPA V CK101摄像机控制键盘说明书 一、产品介绍 本产品是专门为ONY EVI-D70/D70P. EVI_D300/P BRC-H700等摄像机设计的控制键盘。它具有33个控制按钮(键)2行24字符的液晶显示器,三维快速摇杆控控制。I按1.产品特点 A.本产品可以控制多达7台SONY各种型号的摄像机,具有自识别型号功能。 B.本产品提供RS232和RS422两种通信接口,在摄像机与本控制键盘之间距离较近时(15米以内),可采用Rs 32通信电缆连接,大于15米时可采用RS422连接。 C.在要快速使摄像机镜头对准某一预先设定好的位置时,可以采用快捷键(F1)。 D.在要对某一号机进行快速操作时可以采用快捷键(F2)。 E.除了使用键盘按钮以外,本机还采用菜单式(Menu)管理,使用时有英文提示。 F.为满足视频会议的需要,CK一101被设计具有控制摄像机在一定范围内自动循环扫描的功能,在这范围内可以任意设置多达8个轨迹点,在轨迹点上停留时间可以根据需要在1-99秒之间任意设定,在轨迹点之间扫描速度可以1-9的范围内选择。 2、前面板 0-9 数字键 CLEAR 清除键 ENTER 确认键 F-ON 功能(Function)开 F-OFF 功能关 F1 快速调用设置位 F2 快速调用某号摄像机 ON/OFF 打开或关闭摄像机电源 CAM 调用摄像机 A.IRIS 调用自动光圈 A.FOCUS 调用自动聚焦 FREEZE 冻结画面图像 AUTO 摄像机左右自动扫描 SHOT 摄像机左右自动扫描设定 +ZOOM- 焦距调整 +FOUCS- 手动聚焦调整 +IRIS- 手动光圈调整
摄像机云台控制说明书 摄像机云台控制说明书 1:接好摄像机电源,确定摄像机启动正常。 2:接好视频连接线,并连接到电脑的采集卡,确定摄像机视频正常显示。 3:接好控制线,控制线一端连接到电脑的串口(COM),一端连接接到摄像机的RS232 控制接口,以下是各个摄像机的RS232接口图(红色框部分表示RS232接口): 麦德(TAC20P) 威克(MCC-D80) 05、SW1 地址拨码开关 06、VIDEO 视频插孔 07、RS232插孔 08、SW2协议、波特率、图像翻转拨码 09、DC IN 12V 电源插孔 10、RS485/RS422插孔 4:设置摄像机的ID: A:为什么要设置摄像机ID? 一条控制线是可以控制多个摄像机的,而唯一区别摄像机的就是摄像机的ID,所以在控制多个同一个协议的摄像机的时候,摄像机ID就起作用了,若不控制多个,建议就用 默认的ID为0; B:怎样设置摄像机ID? 首先查看摄像机的说明书,看摄像机上有没有设置摄像机ID的开关,比如:麦德的 摄像机就没有ID设置,默认就为0,威克的ID开关是SW1,如上面的图中05 拨码开关设置 摄像机拨码开关位图如下表。 LSB MSB SW1 SW2 可以通过设置8位拨码开关SW1来设定地址的编码。 地址码设定采用二进制方式,共可以设置256个不同的摄像机地址。 设置好摄像机上的ID后,在软件里面打开“设置”菜单的“视频设置”对摄像机设 置相应的ID,如下图: 5:设置串口协议、波特率:
首先查看摄像机说明书或向购买厂商咨询此摄像机支持那些控制协议,目前我们支持 的有麦德的TAC20P,SONYD70/D100摄像机协议,还有比较通用的PELCO-P、PELCO-D协议,威克的MCC-D80就支持这2种协议。知道摄像机的协议后,看摄像机上面有没有设置协 议的开关,因为有的摄像机支持多种协议,一定有开关来设置的,比如威克的摄像机: 如上面设置ID一样,8位拨码开关SW2为模式选择开关,可设置波特率、通讯协议、图像正向/翻转。拨码开关第1位到第4位是设定控制协议,第5位到第7位设定波特率,第8位设定图像正向/翻转。具体设置如图六所示: 威克的摄像机SW2开关设置: 1:使用PELCO-P协议,波特率为9600(BPS): 2:使用PELCO-D协议,波特率为2400(BPS): 设置好摄像机上的协议、波特率后,在软件里面打开“设置”菜单的“视频设置”设 置相应的属性,如下图: 6:软件上的设置: 在软件里面打开“设置”菜单的“视频设置”对话框,云台类型、设备ID、波特率在上面都介绍完了,剩下的控制接口、旋转速度、变焦速度。 控制接口:设置串口,默认就是COM1口,现在的PC机器只有一个串口,所以这个选 项就用默认就可以了; 旋转速度:可以设置云台转动的角度,从5到100,数值越大转动的角度越大;变焦速度:可以设置摄像机变焦的速度,从5到100,数值越大变焦就越快。 7:总结 若想成功的控制摄像机转动变焦,要保证硬件和软件设置正常: A:硬件就是检查控 制线连接接触是否正常,摄像机的ID、协议、波特率开关是否设置正确。 B:软件设置是根据硬件来的,要和硬件设置对应一样,错一个都不行。 C:不要把摄像机的视频和控制 搞混了,要知道视频是通过视频线、采集卡输入到计算机,而控制是通过的控制线,他们 是2个独立的功能,没有视频一样能控制,没有控制也一样能出视频。 D:若装有多个视 频设备时,软件设置一定要先选择好对应的视频设备,否则你对这个视频进行控制,转动 的却是另一个视频。 E:目前支持的协议以及相应的波特率:
云台控制系统开题报告 篇一:开题报告-网络摄像机云台高 毕业设计(论文)开题报告 题目网络摄像机云台高精度控制算法与实现学院通信工程学院 专业通信工程 姓名 班级 学号 指导教师 一、综述本课题国内外研究动态,说明选题的依据和意义 1、国内云台研究动态: 随着社会的发展,视频监控行业在IT行业中逐渐占据一角,同样作为视频监控中摄像机的一部分——云台,也扮演着重要的角色。云台是一种主要由两个高精度步进电机组成的用于承载镜头的支架,其中一个步进电机负责控制云台水平转动,另一个步进电机用于控制云台的垂直方向转动,从而使摄像机镜头能够在水平360°范围内,垂直180°范围内转动。带云台的摄像机已占据了视频监控行业的半壁江山,很多厂家都有专门负责云台方面研究的团队。云台质量的好坏,主要在于预置位的精准度,预置位即是预先设定好
一个位置,当需要摄像机镜头重新回到某个位置时候,只要调用预置位。回到预置位的偏差越小,说明云台的精度越高,做的好的厂家像大华、海康等视频监控厂家云台转动精度能达到0.2°以内,即设定一个预置的位置,云台转动到该位置的偏差不会超过0.2°。而精度差点的产品精度可能就大于这个值了,现在很多厂家都在致力于云台转动精度问题,主要是预置位的精度,以及如何自动矫正预置位的偏差,目前大部分云台都不带转动偏差校正功能,而市场上有转动偏差校正的云台虽然能在云台出现较大偏差时候进行校正,但是其每次转动的误差会比没有偏差校正的云台误差大,因为校正的过程会引入偏差。因此,拥有转动偏差校正而且能够将校正误差减小的云台是许多公司的追求。 2、选题依据和意义: 云台在球型摄像机中扮演的角色非常重要。在一些大型场合,比如说大型超市,一般都安装球型摄像机,因为球型摄像机转动灵活,可以快速地转动到某个角度,也可以全场监控,当发现画面中的某个区域有异常情况时候,操作人员可以手动快速移动到那个区域,再利用摄像机镜头变倍功能可进一步查看异常区域。在一些大些场合,球型摄像机也可以设定几个预置位,然后启动自动巡航,每隔一段时间球型摄像机可以依据云台自动地切换另一个场景或画面,使用非常灵活。然而在一些大型场合若使用不带云台的摄像机,比
操作说明 程序版本:V2.66 1 准备工作 正确安装网络视频监控软件iVMS-4200客户端及流媒体服务器等,并连接视频服务器(视频服务器默认用户名为admin,默认密码为12345),给F100-300C连监控设备连上电源,创建超级用户后输入自定义的用户名和密码点击登录进入客户端软件(图1.1),进入控制面板,各项功能如图1.2所示。 图1.1 图1.2
导入监控点对应所连接的设备输入点1(或2、3、4)(图1.3),通过主预览 打开监控视频(图1.4),双击camera 01视频画面可由1/4屏幕变为整个屏幕显示(图1.5)。 通过点击控制面板中进行设备的管理,显示在线设备、添加、修改或删除设备(图1.6),可通过点击控制面板中进入系统配置界面修改保存文件目录(图1.7)。 图1.3 图1.4
图1.5 图1.6 图1.7
2 PTZ云台控制菜单 2.1 调出PTZ云台控制菜单 连接上视频服务器后,通过右键点击监控视频(图2.1)或者点击在视频右下方的云台图标(图2.2)调出云台控制的界面PTZ(图2.3)。 图2.1 图2.2 图2.3 2.2 配置PTZ云台参数 通过控制面板->监控点配置->云台控制来配置监控点对应的云台参数,参数配置如图2.4所示,然后保存。再点击视图菜单或控制面板中的主预览回到监控点视频。 图2.4 3 菜单的操作 设置预置点:选择要设置的预置点,点击,输入预置点的别名(比如可以设置成预
置点126或yzd移动侦测126),点击确定就完成了对预置点的设置。可设置的预置点范围:01-255. 3.1 移动侦测和打坏点的操作 通过设置预置点126、127来调用移动侦测和打坏点菜单,通过来改变菜 单项的值,通过来切换到不同的菜单项,如图3.1所示。 移动侦测菜单:移动侦测Y/N是否开启移动侦测。 报警模式可以设置自动报警持续的时间,如10s,或者手动关闭报警。 目标指示Y/N是否指示移动的物体(在移动侦测开启状态下才有用)。 灵敏度表示灵敏度的调节,随着值的增大灵敏度也增大。 地址和预地址配合使用,将预地址设置为想要设置的地址,在地址处改 变菜单项的值,就可以把地址设置成预地址的值。(注:监控点配置对 应的地址需要与移动侦测的地址一致,PTZ菜单才能有效操作。)打坏点菜单:x和y配合使用更改光标坐标定位坏点位置。总:坏点总数。T:坏点阈值。菜显:菜单显示在视频的上部还是下部。坏显:(Y/N),坏点是 否显示,标记为白色。对准:(Y/N),光标是否对准坏点。替换:(Y/N), 是否替换当前坏点。撤销:(Y/N),是否撤销倒数第一个坏点。存:(Y/N), 是否保存。清空:(Y/N),是否清空所有坏点。自动:(Y/N),是否自 动查找坏点。菜显:选择菜单在上/下部显示。 注:1.坏点处理时请用均匀的物体遮挡住探测器或镜头;2.灵敏度不宜设置得过高,会导致设备受外界因素如刮风干扰较大。可通过PTZ云台控制菜单修改移动侦测的灵敏度。 图3.1 3.2 屏蔽区域的选择 调用预置点:通过双击预置点1、2进行画/消除屏蔽区域和显示/不显示屏蔽区域。 调用预置点1:画屏蔽区域,或者消除屏蔽区域。 调用预置点2:显示屏蔽区域,或者不显示屏蔽区域。 当要画或者消除屏蔽区域时,首先调用预置点2让屏蔽区域显示,画面会出现一个十字
1、现象、问题描述 对外开局或调试过程中经常会碰到EC无法控制云台的问题,软件界面下发命令,云台没有丝毫响应,或者响应不灵敏,每次都要花费大量时间定位。下面就此类问题定位方法作个小结。 2、云台问题定位方法 方法一:检查接线,云台控制线AB线是否接反,波特率、地址码、云台协议是否设置正确。波特率、地址码、云台协议(通常是Pelco_D或Pelco_P)通过云台内部控制电路板上的拨码开关设置,一般需要拆开云台,云台用户手册有详细图示说明。还有一个简单的方法云台上电自检时会通过视频显示自身的这些参数。我司软件界面上需要与其配置一致。 方法二:如果接线和参数设置都确认ok,要先排除云台本身问题。可以用RS485键盘直接接云台是否可以正常控制。如果没有键盘,可以通过PC机串口接RS232/RS485转换器再连接云台,通过PC的串口下发云台控制指令,RS232/RS485转换器将232电平转化成485电平进而控制云台(见下图图示)。PC下发云台控制指令的小软件可以用串口调试助手(见附件),也可以用自行编写的云台控制程序(见附件)(监控产品软件人员自行编写了“云台测试程序”,定位问题十分好用)。 方法三:如果云台一切正常,此时需要确认设备发给云台的控制协议指令是否正确。将EC的485线缆接RS232/RS485转换器将485电平转化成232电平,再将转换器连到PC上(见下图图示),用PC的串口调试助手接收指令进行比对。如果此时指令不正确,可以通过抓包确认哪一步出错。 方法四:如果方法三串口没有接收到指令,需要通过示波器测量AB信号,是否有信号电平变化, A-B的电压是否大于200mv。根据485协议,当在接收端A-B之间有大于+200mV的电平时,输出为正逻辑电平;小于-200mV时,输出为负逻辑电平。如果排除方法一接线或设置问题后,接口没有信号,或信号电平异常,则通常是EC的485接口硬件故障,此时需要检查
控制协议 1、通令参数: 标准速率为4800bps,无校验,8位数据位,1位停止位 2、命令串格式: 同步字节为。 地址字节为受控制的PG解码器的十六进制地址,从1开始编号 校验字节为Word2到Word 6的检验和(Checksum 校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H] Comma nd 1 and Comma nd 2 女口下: 注:云台自动由Comma nd 的Bit 7 和Bit 控制:为时云台自动开。 Data1(Word5)数据码1控制水平方向速度00-3FH Data2(Word6)数据码2控制垂直方向速度00-3FH。 注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。 控制线连接方式:A 485+ B 485- TX+ 485+
解码器控制代码示例 若非特意注明,控制1号解码器为例 、镜头控制命令 光圈:开(按下) FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下) FF 01 04 00 00 00 05 (弹起) FF 01 00 00 00 00 01 变倍:小(按下) FF 01 00 20 00 00 21 (弹起) FF 01 00 00 00 00 01 大(按下) FF 01 00 40 00 00 41 (弹起) FF 01 00 00 00 00 01 聚焦:近(按下) FF 01 01 00 00 00 02 (弹起) FF 01 00 00 00 00 01 远(按下) FF 01 00 80 00 00 81 (弹起) FF 01 00 00 00 00 01 三、辅助继电器控制命令 AU X 1 : (断开) FF 01 00 0B 00 01 0D (闭合) FF 01 00 09 00 01 0B AU X 2: (断开) FF 01 00 0B 00 02 0E (闭合) FF 01 00 09 00 02 0C AU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0D AU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E 说明: 1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。 2、 要求软件可设置镜头及辅助继电器控制按钮的标题。 3、 辅助继电器的控制有两种方式,要求软件可由用户选择控制方式: 按钮式:按钮按下时发出继电器闭合控制命令 ,反之弹起时发出继电器断开控制命令。 开关式:按一下按钮发出继电器闭合控制命令,再按一下则发出断开命令。 TX- 485- 上: (按下)FF 2号上: (按下) F F 下: (按下) F F 左: (按下) F F 右: (按下) F F 自动: (开) FF 0 01 00 08 00 2F 38 02 00 08 00 2F 39 01 00 10 00 2F 40 01 00 04 2F 00 34 01 00 02 2F 00 32 90 00 00 00 91 (弹起)FF 01 00 00 00 00 01 (弹起)FF 02 00 00 00 00 02 (弹起)FF 01 00 00 00 00 01 (弹起)FF 01 00 00 00 00 01 (弹起)FF 01 00 00 00 00 01 (关) FF 01 00 00 00 00 01 、云台动作命令
安防监控使用说明书公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
目录
第1章概述 集中监控管理系统主要应用于监控中心、值班室等场合,具备实时视频监控、摄像机云台控制、录像检索回放、录像备份下载等基础功能,其中客户端还具备接收和处理报警、辅屏预览、控制解码器上电视墙等应用。 第2章运行和使用 1.用户登录 第一步:双击桌面客户端图标,显示如下登录框。 第二步:输入用户名、密码、中心服务器IP地址与端口等相关信息。默认情况下:用户名:密码端口为 . 第三步:点击《确定》。勾选《记住密码》,保存本次输入的用户名和密码。2.软件界面及菜单介绍 软件主界面分7个部分,如下图所示: 系统功能键:键入监控视图、录像回放 监控组织树:组织资源机构管理。显示整个系统的组织,区域和通道,通过搜索框可以进行通道摄像机的搜索。
控制面板:提供视频播放时的图像控制,包括云台控制,预置点设置和调用,巡航设置和调用、轨迹记录和调用,视频参数调节等。 报警信息菜单:显示客户端接收到的报警信息,对报警信息确认处理等操作。 系统信息:显示CPU占用率,内存占用率信息。 播放面板: 第3章实时监控 点击标签栏《监控视图》,进入监控软件播放界面。初次启动时,播放面板以2*2播放窗口显示,也通过画面分割按键进行窗口分割的选择。 云台控制:在播放界面,可对正处于播放状态的通道进行云台控制操作。通过方向键控制云台 8 个方向的转动,通过乌龟显示图标可控制云台转动的速度。 软件还提供了另外一种云台控制方式——屏幕云台控制。用户可以通过在播放窗口中点击图像上点击鼠标右键选择云台控制选项进行云台控制。云台界面显示如下图: 第4章录像回放 软件支持常规回放、分段回放和事件回放。 常规回放:监控软件根据录像存放位置查找回放录像文件。每个窗口回放一个通道。 分段回放:将同一通道的录像资料按窗口数分割成相等的时间段,每个窗口
云台摄像机常见故障处理办法 常见问题: 1.无法控制云台 2.无法控制解码器 3.部份功能无法实现 4.码转换器的信号指示灯不工作 处理办法: 1.码转灯不闪 软件设置(灯不闪,主要是码转换器未进行工作,先从软件设置着手解决这个问题) 1.软件中的解码器设置(解码器协议、COM口、波特率、校验位、数据位、停止位) 2.更换一个COM口(检查COM口是否损坏), 3.硬件,如上述设置后,还是无法正常使用,打开九针转25针转换器接口。检查接线是否为2-2,3-3,5-7,如果正确,检查码转换器电源是否正常(可用万用表进行电压和和电流测试(9V,500MA)),没有问题可判定码转换器己经损坏 2.无法控制解码器 解码器中无继电器响声。 1.检查解码器是否供电。 2.检查码转换器是否拔到了输出485信号。 3.检查解码器协议是否设置正确 4.检查波特率设置是否与解码器符合(检查地址码设置与所选的摄像机是否一致(详细的地址码拔码表见解码器说明书) 5.检查解码器与码转换器的接线是否接错(1-485A,2-B;有的解码器是1-485B,2-A) 6.检查解码器工作是否正常(老解码器断电一分钟后通电,是否有自检声;软件控制云台时,解码器的UP,DOWN,AUTO等端口与PTCOM口之间会有电压变化,变化情况根据解码器而定24VOR220V,有些解码器的这些端口会有开关量信号变化),如有则解码器工作正常,否则为解码器故障 7.检查解码器的保险管是否己烧坏。 3.无法控制云台 1.检查上面第六项是否正常
2.解码器的24V或220V供电端口电压是否输出正常 3.直接给云台的UP、DOWN、与PTCOM线进行供电,检查云台是否能正常工作。 4.检查供电接口是否接错 5.检查电路是否接错(老解码器为UP、DOWN等线与PTCOM直接给云台供电,各线与摄像机及云台各线直接连接就可以了;有的解码器为独立供电接。
云台控制键盘说明书一、键盘示意图: 图一(正面) 图二(侧面) 二、按键说明:
三、简单操作说明: 把DVR云台控制键盘接通电源及相关设备连接好后,如下图: 图三 确认连接无误后请安如下步骤进行相关参数设置:
1、长按键盘上的“设置”键5-6秒,输入密码(出厂密码8888)确定 后,同过遥控杆上、下操作选择相关设置模式,包括PTZ SETUP、DVR SETUP、SYSTEM SETUP;通过“确认”键进入下级设置菜单。 Ⅰ、PTZ SETUP: 在“ADDRESS”菜单中输入任意三位以内数字,确认后进入下级菜单“PROTOCOL”,通过遥控杆左右选择与云台设备对应的协议,确定后进入下级菜单“BAUD RATE”选择相应的波特率确认后按“退出”键返回第一级菜单。 Ⅱ、DVR SETUP: 进入DVR SETUP菜单后,在“BAUD RATE”选项中选择与被控制DVR设备相对应的波特率(“串口设置”菜单内),确认后按“退出”键返回第一级菜单。 Ⅲ、SYSTEM SETUP: 进入SYSTEM SETUP菜单后,可进行SET PASSWORD(密码设置)、LOAD DEFAULT(恢复默认值)、SOUND SET(按键声音开/关)操作。 2、设置好相关参数后按键盘上的“设备号”键,输入需要控制的设备号 (此设备号须与DVR“串口设置”中的设备号相同),确认后即可进行键盘云台控制或键盘DVR控制,通过长按键盘上的“F3/云台”键约2-3秒进行两种控制模式之间的切换。 3、在键盘DVR控制模式下,可进行操作的按键有: 录像、播放、多画面、静音、单帧/暂停、停止、云台/按键切换、设备号切换、数字键(0-9)、确认、清除、菜单/取消、上、下、左(快退)、右(快进)。 4、在键盘云台控制模式下(屏幕右上角有“∧”这个符号),可进行操 作的按键有: 云台/按键切换、设备号切换、数字键(0-9)、确认、清除、焦距+、焦距-、变倍+、变倍-、光圈+、光圈-、通道号(选择已接入并设置好的通道进行云台控制操作)、上、下、左、右、左旋(变倍减小)、右旋(变倍增加)。
二自由度简易云台增稳控制系统设计 项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。 项目方案: 本课题分以下步骤展开研究: 2014年4月~ 2014年10月 收集有单片机接口程序设计方面的资料,学习相关理论知识; 2014年11月~2014年12月 学习MWC飞行控制板的程序设计技术; 2015年1月~2015年4月 设计板载姿态传感器数据读取; 2015年5月~ 2015年8月 设计舵机控制程序和平台机械结构,测试平台增稳性能; 2015年9月~2015年10月 撰写研究报告、结题,项目鉴定。 本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制 预期成果: 本项目要求完成如下成果: 设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。完成研究报告一份。 二自由度云台概述: 云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。 根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。 增稳的意义: 比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
大华录像机云台控制操作 可对云台的“方向、步长、变倍、聚焦、光圈”等做控制,设置时与方向键配合使用。 ●可对云台的“方向、步长、变倍、聚焦、光圈、预置点、点间巡航、巡 迹、线扫边界、辅助开关调用、灯光开关、水平旋转”等做控制,设置 时与方向键配合使用。 ●“步长”主要用于控制“速度”操作,例如步长为8的转动速度远大于步 长为1的转动速度。(其数值可通过鼠标单击数字软面板或前面板直接按 键获得1~8步长,8为最大步长)。 ●直接单击“变倍、聚焦、光圈“的、键键。对放大缩小、清晰度、 亮度进行调节。 ●“云台转动“可支持8个方向(使用前面板时只能用方向键控制上,下, 左,右4个方向)。 ●设备前面板按键对应云台设置界面按钮: 慢放 快进 上一段
快速定位 在方向的中间是快速定位键,只有支持该功能的协议才可以使用,而且只能用鼠标控制。 步骤1单击进入快速定位页面。 步骤2在界面上单击一点,云台会转至该点且将该点移至屏幕中央。 步骤3支持变倍功能。在快速定位页面用鼠标进行拖动,拖动的方框支持4~16倍变倍功能,如果变大,则按住鼠标由上往下拖动,如果变小,则按 住鼠标由下往上拖动。拖动的方框越小变倍数越大,反之越小。 单击“云台控制主界面”中的展开菜单,可设置和调用“预置点”、“点间巡航”、“巡迹”、“线扫边界”等。 云台控制菜单示意图
单击,进入“云台设置”界面,设置“预置点、点间巡航、巡迹和线扫边界”,如下图所示。 1、云台功能设置 “预置点”的设置: 步骤1进入“云台设置”界面,单击“预置点”页签。 步骤2通过方向按钮转动摄像头至需要的位置。 步骤3在预置点输入框中输入预置点值。 步骤4单击“设置”保存。
网络高清智能高速云台摄像机 中文使用手册 在使用本产品之前,敬请您仔细阅读使用手册! 安全提示: 注意 防止触电危险. 请不要打开!注意:为了减少触电危险,请勿自行拆卸。里面没有用户自己可修理的零件。应由有资格的人员进行维修工作。 ! 在正三角形中闪烁的箭头符号,用以提醒用户在本产 品中附近出现较大的“非绝缘危险点电压”,足以对人体产生危险。 在正三角形中的注意号,用以提醒用户参考有关该机的重要操作与维护的文字说明。 本产品的制造号标示于底部或侧面。请在下面空 白处填上本机的制造号码,并将此说明书妥善保 存,以便需要时查核。 型号: 制造号码: V2.0 ,用以提醒用户参考有关该机的重要操作与维护的文字说明。!
目录 注意事项 (1 第一章功能特点 (3 1.1 云台规格 (3 1.2 云台基本参数 (3 1.3 云台报警 (3 1.4 网络参数 (4 1.5 云台功能 (6 第二章网络设臵 (7 2.1 系统连接图 (7 2.2 登录网络 (8 2.3 预览视频 (10 2.4 设备参数 (15 2.5 语音对讲 (29 2.6 文件管理 (29 2.7 远程回放 (32 2.8 本地设臵 (36 2.9 设备录像 (37 3.0 注销重启 (37
第三章云台设定 (38 3.1 系统连接 (38 3.2 云台拨码设定 (38 3.3 协议和默认波特率选设定 (40 3.4 通信波特率的设定 (41 第四章安装说明 (43 4.1 安全措施 (43 4.2 警告 (43 4.3 环境要求 (44 4.4 布线安全 (44 4.5 安装准备 (44 4.6 安装方式简介 (46 4.7 安装说明 (46 4.8 云台的出线说明 (50 附录Ⅰ:系统参数表 (52 附录Ⅱ:常见故障分析 (58 附录Ⅲ:24VAC 线径和传输距离关系表 (59 附录Ⅳ:防雷击、浪涌 (61 附录Ⅴ:维修服务条款 (62
云台控制键盘说明书键盘示意图: 图一(正面) 图二(侧面) 按键说明:
三、简单操作说明: 把DVR 云台控制键盘接通电源及相关设备连接好后,如下图: 图三 确认连接无误后请安如下步骤进行相关参数设置: Q 16 AUDfO IN ^ir-riy dN
1、长按键盘上的“设置”键5-6 秒,输入密码(出厂密码8888)确定后,同过遥控杆 上、下操作选择相关设置模式,包括PTZ SETUP、DVR SETUP、SYSTEM SETUP;通过“确认”键进入下级设置菜单。 1、PTZ SETUP: 在“ ADDRESS ”菜单中输入任意三位以内数字,确认后进入下级菜单 “PROTOCOL通过遥控杆左右选择与云台设备对应的协议,确定后进入下级菜单 “BAUD RATE选择相应的波特率确认后按“退出”键返回第一级菜单。 n> DVR SETUP: 进入DVR SETUP菜单后,在“ BAUD RATE选项中选择与被控制DVR设备相对应的波特率(“串口设置”菜单内),确认后按“退出”键返回第一级菜单。 川、SYSTEM SETUP: 进入SYSTEM SETUP菜单后,可进行SET PASSWORD (密码设置)、LOAD DEFAULT (恢复默认值)、SOUND SET (按键声音开/关)操作。 2、设置好相关参数后按键盘上的“设备号”键,输入需要控制的设备 号(此设备号须与DVR“串口设置”中的设备号相同),确认后即可进行键盘云台控制或键盘DVF控制,通过长按键盘上的“ F3/云台” 键约2-3 秒进行两种控制模式之间的切换。 3、在键盘DVR空制模式下,可进行操作的按键有: 录像、播放、多画面、静音、单帧/暂停、停止、云台/按键切换、设备号切换、数字键(0-9)、确认、清除、菜单/取消、上、下、左(快退)、右(快进)。 4、在键盘云台控制模式下(屏幕右上角有“A”这个符号),可进行操作的按键有: 云台/按键切换、设备号切换、数字键(0-9)、确认、清除、焦距 +、焦距-、变倍+、变倍-、光圈+、光圈- 、通道号(选择已接入并设置好 的通道进行云台控制操作、)上、下、左、右、左旋(变倍减小、)右旋
李建:基于单片机的云台控制系统设计 ABSTRACT This paper design a Yuntai control system using AT89C52 MCU based on analysis of the Yuntai of the structure and it's control requirements. And the same time realize communication of computer through serial communication of RS-485 bus. MCU control module, keyboard module, motor driver module and remote control module comprise the control system. And complete the corresponding software design, testing and simulation. Key word: A T89C52; Yuntai control; Stepper motor; Simulation ;Serial communication 目录 摘要........................................................................................... 错误!未定义书签。ABSTRACT ................................................................................................................... I 第1章引言 (1) 1.1 云台 (1) 1.2 单片机 (1) 1.3 本设计完成的任务 (2) 第2章云台 (3) 2.1 云台概述 (3) 2.1.1 云台内部结构 (3) 2.1.2云台的性能指标 (3) 2.1.3云台电机 (5) 2.2 步进电机 (6) 2.2.1步进电机的工作原理 (6) 2.2.2 步进电机主要技术指标 (8) 第3章总体方案 (10) 3.1云台控制系统简析 (10) 3.2控制系统实现 (10)
竭诚为您提供优质文档/双击可除 云台通讯协议 篇一:几种云台控制协议 pelco产品协议解析 pelco(派尔高)的监控器材在我国有很广泛的应用。pelco有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制pelco的矩阵或镜头,这就要求充分了解pelco的传输协议。诶诺基数码科技有限公司的视频解码软件可完全兼容pelco协议,可通过pc机控制pelco的各种设备。 本文为你详细解析pelco常用协议之一:pelco-d协议pelco-d协议 pelco-d协议一般用于矩阵和其它设备之间的通信。它的格式如下: 所有的值都是用的16进制表示。同步字通常都是$FF。 地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。命令字1和命令字2设置如下: sence码与bit4和bit3有关。在bit4和bit3为1的
情况下,如果sence码为1,则命令就是自动扫描和和摄像机打开;如果sence码为0,则命令就是手动扫描和摄像机关闭。当然如果bit4或bit3为0的话那命令就无效了。 数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。 校验码是指byte2到byte6这5个数的和(若超过255 则除以256然后取余数)。 pelco-d&pelco-p协议格式 高速球的设置主要包括协议的选择和消息的发送。高速球的型号是:tmd-scs18dn使用的协议有:bo1,alec,pelco -9600,pelco-4800,pelco-2400,ao1, santach1650,peaRmain,kony19.2kbkony20.832,hd600,lil in,kalatel,Vcl,tota,wj-Fs616,philips,ad.厂家设置的 是pelco-2400.该协议的具体内容如下: pelco-d协议一般用于矩阵和其它设备之间的通信。它的格式如下: 同步字通常都是$FF。 地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。 是自动扫描和和摄像机打开;如果sence码为0,则命
PELCO产品协议解析 PELCO (派尔高)的监控器材在我国有很广泛的应用。PELCO有自己的传输控制协议, 当它的产品配套使用时,可以互相兼容。但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控 制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。诶诺基数码科技有限公司的视频解码软件可 完全兼容PELCO协议,可通过PC机控制PELCO的各种设备。 本文为你详细解析PELCO常用协议之一:PELCO-D协议 PELCO-D 协议 所有的值都是用的16进制表示。 同步字通常都是$FF。 地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。 Sence码与Bit4和Bit3有关。在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。当然如果Bit4或Bit3为0的话那命令就无效了。 数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。 校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。 PELCO-D & PELCO-P 协议格式 高速球的设置主要包括协议的选择和消息的发送。高速球的型号是:TMD —SCS18DN 使用的协议 有:BO1,ALEC,PELCO —9600,PELCO —4800,PELCO —2400,AO1, SANTACH1650,PEARMAIN,KONY19.2KB K0NY20.832,HD600,LILIN,KALATEL, VCL,TOTA,WJ-FS616,PHILIPS,AD. 厂家设置的是PELCO-2400. 该协议的具体内容如下: PELCO-D协议一般用于矩阵和其它设备之间的通信。它的格式如下:
HS-8801重型云台 使 用 说 明 书 在使用本产品之前,敬请您仔细阅读使用手册。 出厂配置:PELCO-D协议、波特率2400、供电AC12V
安全注意事项 1.操作使用前请详阅说明书及快捷安装指南。 2.所有操作请参阅说明书指示。 3.请勿尝试临时将机器置于不稳定的桌面或支架上。进行测试,在操作前请确保机器摆放、装配牢固。 4.机器在户外安装时,用户必须确保购买的机器型号符合户外环境使用,并严格参照安装说明书,避 免因安装不当造成渗水而导致机器损坏。 5接线时必须遵守各项电气安全标准,使用本机自带的专用电源。本产品RS-485及视频信号采用TVS级防雷击技术,可以有效防止500W以下功率的雷击、浪涌等各类脉冲信号对设备造成的损坏。RS-485及视频信号在传输过程中应与高压设备或电缆保持足够的距离,必要时还要做好防雷击、防浪涌等防护措施。 6.无论是使用中或非使用中,绝不可以使球型云台瞄准太阳或其它光亮物体。否则可能造成球型摄像 机CCD永久受损。 7.当机器有故障时,请勿轻易对机器进行任何修理操作,应先参照说明书查出故障,查不出原因则请 专业人员维修。有关维修工作,必须由我公司授权的维修人员进行。 声明 此版权属于本公司所有,未经本公司许可,任何单位或个人均不得以任何形式或任何手段复制或抄袭本书的部分或全部内容。 本公司遵循持续发展的策略。因此,公司保留在不预先通知的情况下,对本说明书中描述的任何产品进行修改和改进的权利。 本说明书的内容按“现状”提供。除非适用的法律另有规定,否则,本公司不对说明书的准确性、可靠性和内容做出任何类型的、明确或默许的保证。本公司保留在不预先通知的情况下随时修订或收回本说明书的权利。
大华硬盘录像机云台设置使用说明书 一、云台的操作(设置) 在DVR的用户界面上依次选择“系统设置”和“云台 控制”就进入了云台设置窗口。如下: ①通道:选择通道号 ②协议:选择云台协议 ③地址:对应通道球机的地址 ④后四项需根据实际情况进行设置(参考协议文档或说明书)二、云台的操作(控制)
DVR多画面时,将鼠标移到某通道上,右键菜单中选择“云台控制”,即可激活该通道的云台控制窗口或当DVR处于单画面时,右键菜单中选择“云台控制”,即可激活当前通道的云台控制窗口. 通过“页面切换”按钮一共可以切换出3个页面云台的操作(控制)◆菜单控制页面。对球机菜单进行操作的页面 基本控制页面。 包括方向和镜头的控制,并可通过“设置”按钮激活预置点,模式,线扫,点间巡航设置窗口。
◆扩展控制页面 包括预置点,模式,线扫,水平旋转,点间巡航,辅助开关以及灯光的控制功能。 云台的操作(控制)如下图所示:
◆变倍可将拍摄到的画面放大或者缩小 ◆聚焦可调整焦距,调节被拍摄画面的清晰度 ◆光圈可调节光圈的打开程度,避免光线太强或太暗导致画面 不清楚 云台的操作(控制) 在所拍摄的画面上用鼠标画一个矩形,则云台(球机) 将以所画矩形的中心点作为整个屏幕的中心点进行方 向调整,并且根据所画矩形的大小,进行变倍聚焦的 操作。所画矩形越小,则放大倍数越高 点击“SIT”后进入全屏模式, 便可用鼠标在画面上随意绘制矩形绘制矩形时,鼠标从上到下得拖动是放大,鼠标从下到上得拖动是缩小. 云台的操作(预置点设置)
预置点可以记录下某一个时刻云台(球机)的姿态,并为其赋予一个编号,并且在需要的时候根据这个编号让球机恢复对应的姿态。 云台的操作(预置点清除) 云台的操作(预置点调用)
云台控制及常见故障 关于云台控制及常见故障 1、硬件连接 1.1 嵌入式视频服务器接云台,应该接视频服务器哪个硬件接口及该接口定义? 嵌入式视频服务器接云台解码器,一般都是接视频服务器后面板的RS-485口接口定义如下: RJ45头管脚说明(把柄朝下,从左往右依次为1-8) 对于RJ45头的这一端1、2线为发送的正、负线3、4为接收的正、负线,7为公用接地线; 1.2 怎样使RS-485接口跟云台解码器连接? 首先保证数据线的连通性。设备端的定义是一正、二负,通常是接解码器端的A 正、B负(不排除解码器端的实际正、负标注有误,这样反接即可),或者球机端的R+、R-(不排除接T+、T-,测试过的一款三星球机就是如此,建议仔细查看球机的使用说明书,特别是数据收发这一块的定义)。 1.3 RS-485口除了接云台解码器,能不能作其它用途? RS-485口除了接云台解码器外,也可以作为透明通道使用,不过在设备菜单里不能进行设置,但提供函数接口,在客户端中已有开发。 1.4怎样判断RS-485口是否正常? 用万用表测量设备后RS-485口,一、二两根数据线的电压,如有电压(通常1 -5v),则正常;反之则不正常。 1.5为什么云台不受控制?
可能原因: 1、RS-485接口电缆线连接不正确,RJ45水晶头的把柄朝下,从左向右数第一根线为正(D+、A),第二根线为负(D-、B); 2、云台解码器类型不对; 3、云台解码器波特率设置不正确; 4、云台解码器地址位设置不正确; 5、主板的RS-485接口坏。 1.6云台控制信号接避雷器有什么要求? 嵌入式视频服务器中,无音频设备一直是有485保护器的,而设备在2006年后出厂的产品中,也已装有485保护器,这种保护器保护级别较高,可以防止静电烧坏485口,也可以防止因高电压而烧坏485口。如果需要接避雷保护器,接上去的保护器的并联电阻不能太小。 2、解码器参数 2.1需要设置哪些参数? 一般情况下,在设置解码器参数时,主要是设置通道号、解码器类型、波特率和地址位。这四个参数只要有一个设置不正确,就会导致云台不受控。其它参数一般位默认,具体看解码器参数说明。 2.2怎么控制云台? 当正确设置好解码器参数后,按面板上的云台控制就进入控制界面,按数字键选择需要控制的通道号,根据面板上的方向导航键来控制云台的上下左右,按相应的功能键来控制变倍、聚焦等动作。 2.3怎么控制云台的速度?