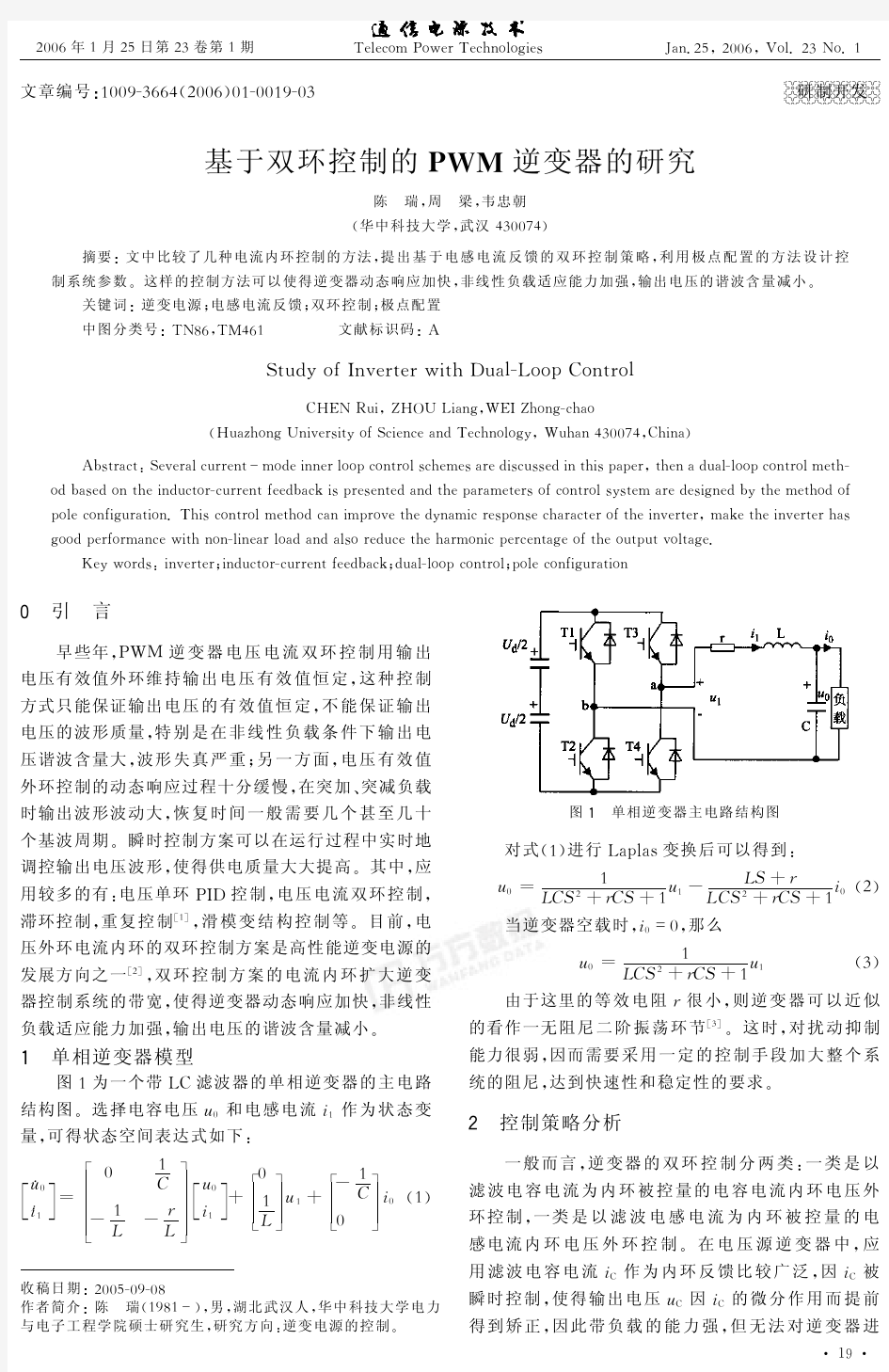
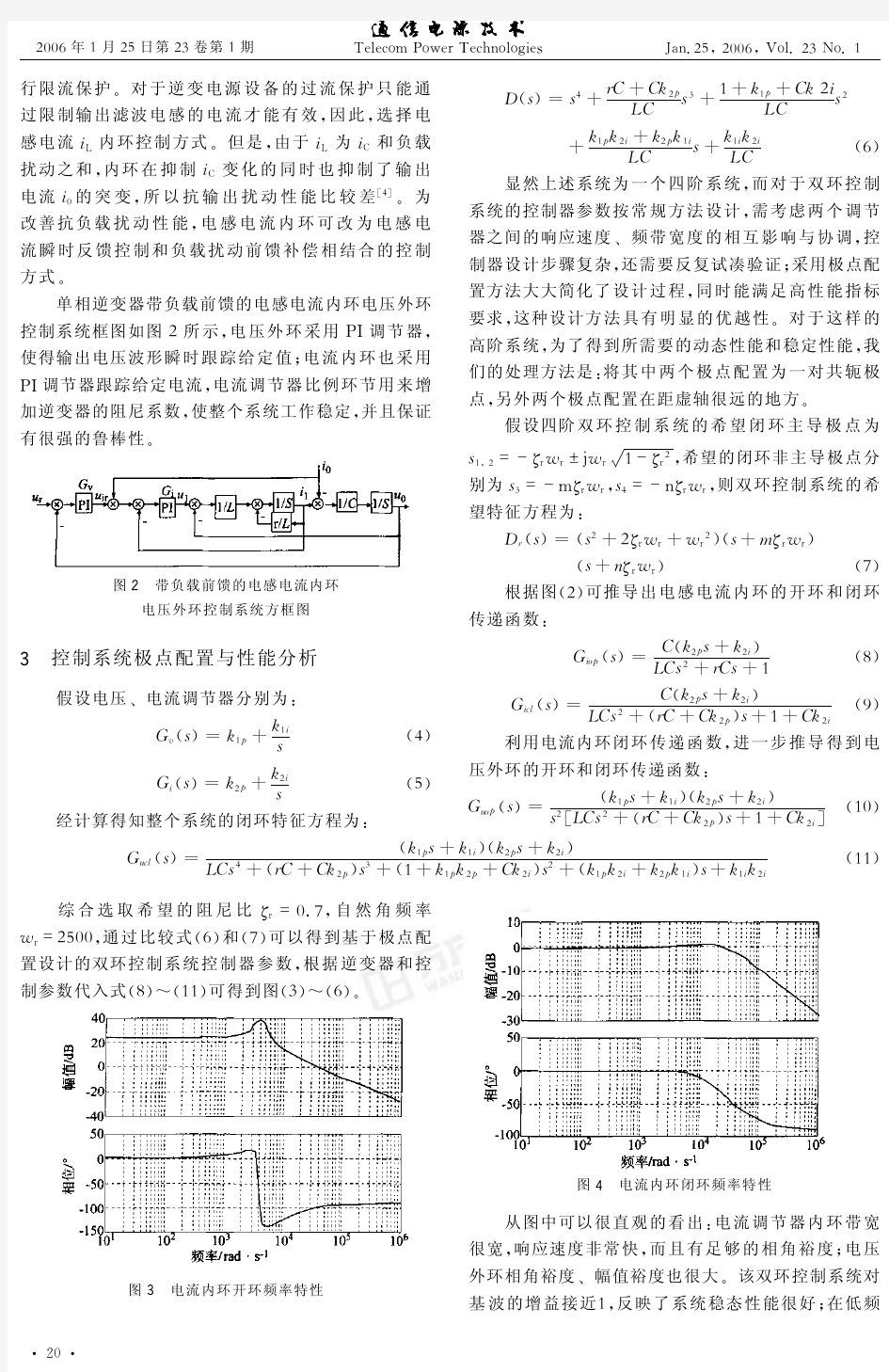
基于DSP的三相SPWM变频电源的设计 变频电源作为电源系统的重要组成部分,其性能的优劣直接关系到整个系统的安全和可靠性指标。现代变频电源以低功耗、高效率、电路简洁等显著优点而备受青睐。变频电源的整个电路由交流-直流-交流-滤波等部分构成,输出电压和电流波形均为纯正的正弦波,且频率和幅度在一定范围内可调。 本文实现了基于TMS320F28335的变频电源数字控制系统的设计,通过有效利用TMS320F28335丰富的片上硬件资源,实现了SPWM的不规则采样,并采用PID算法使系统产生高品质的正弦波,具有运算速度快、精度高、灵活性好、 系统扩展能力强等优点。 系统总体介绍 根据结构不同,变频电源可分为直接变频电源与间接变频电源两大类。本文所研究的变频电源采用间接变频结构即交-直-交变换过程。首先通过单相全桥整流电路完成交-直变换,然后在DSP控制下把直流电源转换成三相SPWM波形供给后级滤波电路,形成标准的正弦波。变频系统控制器采用TI公司推出的业界首款浮点数字信号控制器TMS320F28 335,它具有150MHz高速处理能力,具备32位浮点处理单元,单指令周期32位累加运算,可满足应用对于更快代码开发与集成高级控制器的浮点处理器性能的要求。与上一代领先的数字信号处理器相比,最新的F2833x浮点控制器不仅可将性能平均提升50%,还具有精度更高、简化软件开发、兼容定点C28x TM控制器软件的特点。系统总体框图如 图1所示。 图1 系统总体框图 (1)整流滤波模块:对电网输入的交流电进行整流滤波,为变换器提供波纹较小的直流电压。 (2)三相桥式逆变器模块:把直流电压变换成交流电。其中功率级采用智能型IPM功率模块,具有电路简单、可 靠性高等特点。 (3)LC滤波模块:滤除干扰和无用信号,使输出信号为标准正弦波。 (4)控制电路模块:检测输出电压、电流信号后,按照一定的控制算法和控制策略产生SPWM控制信号,去控制IPM开关管的通断从而保持输出电压稳定,同时通过SPI接口完成对输入电压信号、电流信号的程控调理。捕获单元完 成对输出信号的测频。 (5)电压、电流检测模块:根据要求,需要实时检测线电压及相电流的变化,所以需要三路电压检测和三路电流检测电路。所有的检测信号都经过电压跟随器隔离后由TMS320F28335的A/D通道输入。
第4卷 中国舰船研究第4卷第5期2009年10月中国舰船研究Chinese Journal of Ship Research Vol .4No.5 Oct.2009收稿日期:2008-09-03 作者简介:朱承邦(1963-,男,高级工程师。研究方向:雷达应用 1引言 现代科技发展日新月异,各类电气设备对电源的品质要求也越来越高。逆变供电作为一种有效的电力供应形式,已广泛应用于生产生活的各个领域。 为了不断改善逆变器输出性能,人们发展出了多种逆变器控制方法,常见的有:电压瞬时值控 制、电流滞环控制、电流预测控制、鲁棒控制[1]、重复控制[2,3]、滑模控制[4]及SPWM 电流控制等。就各种逆变器控制策略的特点来看,基于SPWM 的电压电 流双环逆变器控制是一种较好的控制方法[5,6]。 本文针对电压电流双环逆变器控制模型,设计了电流内环和电压外环的控制参数,对设计的双环控制逆变器模型进行了仿真分析,分析结果 基于SPWM 控制的电压、电流双环 逆变器建模及其仿真 朱承邦1 李 乐2 王晓鹏2
1大连船舶重工集团有限公司军事代表室,辽宁大连1160052中国舰船研究设计中心,湖北武汉430064 摘 要:基于SPWM 的电压电流双环逆变器控制相对其他逆变器控制策略具有一定优越性,但其控制器参数设 计却是一个重点和难点。针对逆变器的SPWM 电压电流双环控制策略,建立了系统的控制模型,设计了电流内环和电压外环的控制器参数,并根据经典控制理论的判据,分别对控制器电流内环和电压外环参数进行了理论验证。最后根据设计的控制器参数,对SPWM 电压电流双环控制系统模型进行了仿真分析,结果表明,系统设计合理,效果满意。 关键词:SPWM ;逆变器;电压电流双环;仿真中图分类号:TM743 文献标志码:A 文章编号:1673-3185(200905-54-05 Modeling and Si mulation of Voltage and Current Double Loop Control Based on SPWM Inverters Zhu Cheng-bang 1Li Le 2Wang Xiao -p eng 2 1The Naval Representative Office ,Dalian Shipbuilding Heavy Industry Co.,Dalian 116005,China 2China Ship Development and Design Cent er ,Wuhan 430064,China Abstract :Comparing with other inverters control strategy ,voltage and current double loop control based on SPWM inverters are superior in capabilities though the controller parameters design is significant and difficult.In this paper ,the system control
逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,鲁棒性好,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点: PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。 重复控制
PWM控制技术 主要内容:PWM控制的基本原理、控制方式与PWM波形的生成方法,PWM逆变电路的谐波分析,PWM整流电路。 重点:PWM控制的基本原理、控制方式与PWM波形的生成方法。 难点:PWM波形的生成方法,PWM逆变电路的谐波分析。 基本要求:掌握PWM控制的基本原理、控制方式与PWM波形的生成方法,了解PWM 逆变电路的谐波分析,了解跟踪型PWM逆变电路,了解PWM整流电路。 PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。第3、4章已涉及这方面内容: 第3章:直流斩波电路采用,第4章有两处:4.1节斩控式交流调压电路,4.4节矩阵式变频电路。 本章内容 PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM 控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。 本章主要以逆变电路为控制对象来介绍PWM控制技术,也介绍PWM整流电路 1 PWM控制的基本原理 理论基础: 冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。冲量指窄脉冲的面积。效果基本相同,是指环节的输出响应波形基本相同。低频段非常接近,仅在高频段略有差异。 图6-1 形状不同而冲量相同的各种窄脉冲 面积等效原理: 分别将如图6-1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图6-2a所示。其输出电流i(t)对不同窄脉冲时的响应波形如图6-2b所示。从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。脉冲越窄,各i(t)响应波形的差异
https://www.doczj.com/doc/4115408528.html,/ 逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点:
https://www.doczj.com/doc/4115408528.html,/ PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。
电流滞环跟踪PWM(CHBPWM)控制技术的仿真 桂寒 120100068 摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink 工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。 关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2. 应用PWM 控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都是以输出电压近似正弦波为目标的。但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 2. 电流滞环跟踪控制原理 2.1 单相电流滞环控制原理 常用的一种电流闭环控制方法是电流滞环跟踪 PWM (Current Hysteresis Band PWM ——CHBPWM )控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。 图1 电流滞环跟踪控制的A 相原理图 图中,电流控制器是带滞环的比较器,环宽为2h 。将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ? a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。B 、C 二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
? 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功 率开关器件V1导通,变压变频器输出正电压,使a i 增大。当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ? 直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。 但此时未必能够导通,由于电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时ia=ia*-h ,到达滞环偏差的下限值,使HBC 再翻转,又重复使V1导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。 图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。 2.2 三相电流滞环控制原理 图3 三相电流跟踪型PWM 逆变电路
实训二典型电动机控制实操 一、实训目的 1.掌握PLC外围直流控制及交流负载线路的接法及注意事项 2.掌握用PLC控制电机运行状态的方法 二、实训设备 序号名称型号与规格数量备注 1可编程控制器实训装置THPFSM-1/2 1 2电机实操单元B20 1 3实训导线3号转4号若干 4PC/PPI通讯电缆 1 西门子 5计算机 1 自备 三、面板图 四、控制要求 1.点动控制 每按动启动按钮SB1一次,电动机作星形连接运转一次。 2.自锁控制 按启动按钮SB1,电动机作星形连接启动,只有按下停止按钮SB2时电机才停止运转。 3.联锁正反转控制 按启动按钮SB1,电动机作星形连接启动,电机正转;按启动按钮SB2,电动机作星形连接启动,电机反转;在电机正转时,反转按钮SB2被屏蔽,在电机反转时,反转按钮SB1被屏蔽;如需正反转切换,应首先按下停止按钮SB3,使电机处于停止工作状态,方可对其做旋转方向切换。 4.延时正反转控制 按启动按钮SB1,电动机作星形连接启动,电机正转,延时10S后,电机反转;按启动
按钮SB2,电动机作星形连接启动,电机反转,延时10S 后,电机正转;电机正转期间,反转启动按钮无效,电机反转期间,正转启动按钮无效;按停止按钮SB3,电机停止运转。 5. 星/三角换接启动控制 按启动按钮SB1,电动机作星形连接启动;6S 后电机转为三角形方式运行;按下停止按钮SB3,电机停止运行。 五、 功能指令使用及程序流程图 1. 定时器指令使用 S7-200 CPU 提供了256个定时器,共分为三种类型: TON (接通延时定时器):输入端通电后,定时器延时接通; TONR (有记忆接通延时定时器):输入端通电时定时器计时,断开时计时停止;除非复位端接通,计时值累计; TOF (断开延时定时器):输入端通电时输出端接通,输入端断开时定时器延时关断。 定时器对时间间隔进行计数,时间间隔又称分辨率(或时基),S7-200 CPU 提供三种定时器分辨率:1ms 、10ms 、100ms 。 定时器类型 分辨率/ms 最长定时值/s 定时器号 TONR 1 32.767 T0,T64 10 327.67 T1~T4,T65~T68 100 3276.7 T5~T31,T69~T95 TON 、TOF 1 32.767 T32,T96 10 327.67 T33~T36,T97~T100 100 3276.7 T37~T63,T101~T255 2. 程序流程图 六、 端口分配及接线图 1. I/O 端口分配功能表 序号 PLC 地址(PLC 端子) 电气符号 (面板端子) 功能说明 1. I0.0 SB1 正转启动 2. I0.1 SB2 反转启动 3. I0.2 SB3 停止
光伏并网逆变器控制与仿真设计 为了达到提高光伏逆变器的容量和性能目的,采用并联型注入变换技术。根据逆变器结构以及光伏发电阵电流源输出的特点,选用工频隔离型光伏并网逆变器结构,并在仿真软件PSCAD中搭建光伏电池和逆变器模型,最后通过仿真与实验验证了理论的正确性和控制策略的可行性。 ?近年来,应用于可再生能源的并网变换技术在电力电子技术领域形成研究热点。并网变换器在太阳能光伏、风力发电等可再生能源分布式能源系统中具有广阔发展前景。太阳能、风能发电的重要应用模式是并网发电,并网逆变技术是太阳能光伏并网发电的关键技术。在光伏并网发电系统中所用到的逆变器主要基于以下技术特点:具有宽的直流输入范围;具有最大功率跟踪(MPPT)功能;并网逆变器输出电流的相位、频率与电网电压同步,波形畸变小,满足电网质量要求;具有孤岛检测保护功能;逆变效率高达92%以上,可并机运行。逆变器的主电路拓扑直接决定其整体性能。因此,开发出简洁、高效、高性价比的电路拓扑至关重要。 ?1 逆变器原理 ?该设计为大型光伏并网发电系统,据文献所述,一般选用工频隔离型光伏并网逆变器结构,如图1所示。光伏阵列输出的直流电由逆变器逆变为交流电,经过变压器升压和隔离后并入电网。光伏并网发电系统的核心是逆变器,而电力电子器件是逆变器的基础,虽然电力电子器件的工艺水平已经得到很大的发展,但是要生产能够满足尽量高频、高压和低EMI的大功率逆变器时仍有很大困难。所以对大容量逆变器拓扑进行研究是一种具有代表性的解决方案。作为太阳能光伏阵列和交流电网系统之间的能量变换器,其安全性,可靠性,逆变效率,制造成本等因素对于光伏逆变器的发展有着举足轻
PWM控制电路设计 CYBERNET 应用系统事业部 LED照明作为新一代照明受到了广泛的关注。仅仅依靠LED封装并不能制作出好的照明灯具。本文主要从电子电路、热分析、光学方面阐述了如何运用LED特性进行设计。 在上一期的“LED驱动电路设计-基础篇”中,介绍了LED的电子特性和基本的驱动电路。遗憾的是,阻抗型驱动电路和恒电流源型驱动电路,大围输入电压和大电流中性能并不强,有时并不能发挥出LED的性能。相反,用脉冲调制方法驱动LED电路,能够发挥LED的多个优点。这次主要针对运用脉冲调制的驱动电路进行说明。 PWM是什么? 脉冲调制英文表示是Pulse Width Modulation,简称PWM。PWM是调节脉冲波占空比的一种方式。如图1所示,脉冲的占空比可以用脉冲周期、On-time、Off-time表示,如下公式:占空比=On-time(脉冲的High时间)/ 脉冲的一个周期(On-time + Off-time) Tsw(一周期)可以是开关周期,也可以是Fsw=1/Tsw的开关频率。
图1 Pulse Width Modulation (PWM) 在运用PWM的驱动电路中,可以通过增减占空比,控制脉冲一个周期的平均值。运用该原理,如果能控制电路上的开关设计(半导体管、MOSFET、IGBT等)的打开时间(关闭时间),就能够调节LED电流的效率。这就是接下来要介绍的PWM控制。PWM信号的应用 PWM控制电路的一个特征是只要改变脉冲幅度就能控制各种输出。图2的降压电路帮助理解PWM的控制原理。在这个电路中,将24V的输入电压转换成12V,需要增加负载。负载就是单纯的阻抗。电压转换电路的方法有很多,运用PWM信号的效果如何呢?
SPWM波控制单相逆变器双闭环PID调节器的Simulink 建模与仿真 随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏 会直接影响整个系统的逆变性能和带载能力。逆变器的控制目标是提高逆变器 输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带 不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。在这些指标中对输出电压的THD 要 求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外 环和电压瞬时值内环进行控制。针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。通过仿真,验证了控制思路的正确性以及存该控制策略 下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。并以仿真为先导,将其思想移植到具体开发中,达到预期效果。 1 三电平逆变器单相控制模型的建立 带LC 滤波器的单相逆变器的主电路结构如图1 所示。图1 中L 为输出 滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。在建立控制系统的仿真模型时,需要 采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所 需要调节的值。在此仿真模型中,驱动波形采用的是三电平的SPWM 波形, 具体的产生原理在这不做详细描述。在Matlah 的Simlink 库中SPWM 波的产 生如图2 所示,这里调制比设为0.8.
目录 摘要 (1) 关键词 (1) 一、电流滞环跟踪控制原理 (2) 二、三相电流滞环跟踪控制系统的仿真 (5) 1、建立系统仿真模型 (5) 2、模块参数设置 (6) 3、电路封装 (8) 4、作图程序设计 (10) 三、仿真波形及频谱分析 (12) 四、仿真结果分析与总结 (18) 1、仿真波形比较 (18) 2、电流频谱分析比较 (19) 3、相电压、线电压频谱分析比较 (19) 4、总结 (19) 五、课设心得体会 (20) 六、参考文献 (21)
摘要: 滞环控制是一种应用很广的闭环电流跟踪控制方法,通常以响应速度快和结构简单而著称。在各种变流器控制系统中,滞环控制单元一般同时兼有两种职能,一则作为闭环电流调节器,二则起着PWM调制器的作用,将电流参考信号转换为相应的开关指令信号。然而,滞环控制的开关频率一般具有很大的不定性,高低频率悬殊,其开关频率范围往往是人们在进行滞环控制系统设计师比较关心的重要方面,只有明确开关频率的计算方法,才便于进行开关器件、滤波参数及滞环控制参数的选择。 电流跟踪型逆变器输出电流跟随给定的电流波形变化,这也是一种PWM控制方式。电流跟踪一般都采用滞环控制,即当逆变器输出电流与给定电流的偏差超过一定值时,改变逆变器的开关状态,使逆变器输出电流增加或减小,将输出电流与给定电流的偏差控制在一定范围内。 关键词:电流滞环跟踪PWM、闭环控制、滞环控制器HBC、环宽、电流偏差、开关频率、响应波形、频谱图
一、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。 图1 电流滞环跟踪控制的A相原理图 图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流i*a 与输出电流i a进行比较,电流偏差?i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。B、C二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图4。 ?如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增 大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持 导通,使继续增大 ?直到达到i a= i*a+ h,?i a = –h,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而
UM0289 User manual eMotion: a motion control kit based on ST10F276 Introduction This user manual describes the features of the eMotion Kit, and explains how use the kit to perform generic speed control of DC and BLDC motors. Figure 1.eMotion kit Key features ■GUI software (Windows XP OS-compatible) ■Control board MDK-ST10 (ST10F276 core, 16-bit DSP @ 64 MHz) ■Shielded interface board (for encoder feedback) ■powerSPIN boards (L6205 / L6235 eval) ■Configurable PID closed speed loop for up three motors DC or BLDC ■RS232 communication November 2006 Rev 11/29 https://www.doczj.com/doc/4115408528.html,
Contents UM0289 Contents 1Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.1Getting started . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.1MDK-ST10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.2PowerSPIN boards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.2.1L6205 Eval board (DC Motor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.2.2L6235 Eval board (BLDC Motor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.3Feedback board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 3PC software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 3.1eMotion GUI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 3.1.1EVAL 6235 window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 3.1.2EVAL 6205 window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 3.1.3Log window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 4ST10 firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.1Communication protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.2Control algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 5Using eMotion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 5.1Evaluate eMotion kit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 5.1.1Installing eMotion GUI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 5.1.2Board configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 5.1.3Control operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 6Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 6.1Hardware issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 7Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 Appendix A Bibliography. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 2/29
PWM控制电路的基本构成及工作原理 于开关器件的高频通断和输出整流二极管反向恢复。很强的电磁骚扰信号通过空间辐射和电源线的传导而干扰邻近的敏感设备。除了功率开关管和高频整流二极管外,产生辐射干扰的主要元器件还有脉冲变压器及滤波电感等。 虽然,功率开关管的快速通断给开关电源带来了更高的效益,但是,也带来了更强的高频辐射。要降低辐射干扰,可应用电压缓冲电路,如在开关管两端并联RCD缓冲电路,或电流缓冲电路,如在开关管的集电极上串联 20~80μH的电感。电感在功率开关管导通时能避免集电极电流突然增大,同时也可以减少整流电路中冲击电流的影响。 功率开关管的集电极是一个强干扰源,开关管的散热片应接到开关管的发射极上,以确保集电极与散热片之间由于分布电容而产生的电流流入主电路中。为减少散热片和机壳的分布电容,散热片应尽量远离机壳,如有条件的话,可采用有屏蔽措施的开关管散热片。 整流二极管应采用恢复电荷小,且反向恢复时间短的,如肖特基管,最好是选用反向恢复呈软特性的。另外在肖特基管两端套磁珠和并联RC吸收网络均可减少干扰,电阻、电容的取值可为几Ω和数千pF,电容引线应尽可能短,以减少引线电感。实际使用中一般采用具有软恢复特性的整流二极管,并在二极管两端并接小电容来消除电路的寄生振荡。 负载电流越大,续流结束时流经整流二极管的电流也越大,二极管反向恢复的时间也越长,则尖峰电流的影响也越大。采用多个整流二极管并联来分担负载电流,可以降低短路尖峰电流的影响。 开关电源必须屏蔽,采用模块式全密封结构,建议用1mm以上厚度的 镀锌钢板,屏蔽层必须良好接地。在高频脉冲变压器初、次级之间加一屏蔽层
太阳能光伏并网控制逆变器工作原理及控制方法摘要:太阳能光伏发电是21世纪最为热门的能源技术领域之一,是解决人类能源危机的重要手段之一,引起人们的广泛关注。本文介绍了太阳能光伏并网控制逆变器的工作过程,分析了太阳能控制器最大功率跟踪原理,太阳能光伏逆变器的并网原理及主要控制方式。 1 引言: 随着工业文明的不断发展,我们对于能源的需求越来越多。传统的化石能源已经不可能满足要求,为了避免面对能源枯竭的困境,寻找优质的替代能源成为人们关注的热点问题。可再生能源如水能、风能、太阳能、潮汐能以及生物质能等能源形式不断映入人们的眼帘。水利发电作为最早应用的可再生能源发电形式得到了广泛使用,但也有人就其的环境问题、安全问题提出过质疑,况且目前的水能开发程度较高,继续开发存在一定的困难。风能的利用近些年来也是热点问题,但风力发电存在稳定性不高、噪音大等缺点,大规模并网对电网会形成一定冲击,如何有效控制风能的开发和利用仍是学术界关注的热点。在剩下的可再生能源形式当中,太阳能发电技术是最有利用价值的能源形式之一。太阳能储量丰富,每秒钟太阳要向地球输送相当于210亿桶石油的能量,相当于全球一天消耗的能量。我国的太阳能资源也十分丰富,除了贵州高原部分地区外,中国大部分地域都是太阳能资源丰富地区,目前的太阳能利用率还不到1/1000。因此在我国大力开发太阳能潜力巨大。 太阳能的利用分为“光热”和“光伏”两种,其中光热式热水器在我
国应用广泛。光伏是将光能转化为电能的发电形式,起源于100多年前的“光生伏打现象”。太阳能的利用目前更多的是指光伏发电技术。光伏发电技术根据负载的不同分为离网型和并网型两种,早期的光伏发电技术受制于太阳能电池组件成本因素,主要以小功率离网型为主,满足边远地区无电网居民用电问题。随着光伏组件成本的下降,光伏发电的成本不断下降,预计到2013年安装成本可降至1.5美元/Wp,电价成本为6美分/(kWh),光伏并网已经成为可能。并网型光伏系统逐步成为主流。本文主要介绍并网型光伏发电系统的系统组成和主要部件的工作原理。 2 并网型光伏系统结构 图1所示为并网型光伏系统的结构。并网型光伏系统包括两大主要部分:其一,太阳能电池组件。将太阳传送到地球上的光能转化成直流电能;其二,太阳能控制逆变器及并网成套设备,负责将电池板输出直流电能转为电网可接受的交流能量。根据功率的不同太阳能逆变器的输出形式可为单相或者三相;可带隔离变压器,也可不配隔离变压器。
PWM是什么? 脉冲调制英文表示是Pulse Width Modulation,简称PWM。PWM是调节脉冲波占空比的一种方式。如图1所示,脉冲的占空比可以用脉冲周期、On-time、Off-time 表示,如下公式: 占空比=On-time(脉冲的High时间)/ 脉冲的一个周期(On-time + Off-time) Tsw(一周期)可以是开关周期,也可以是Fsw=1/Tsw的开关频率。 图1 Pulse Width Modulation (PWM) 在运用PWM的驱动电路中,可以通过增减占空比,控制脉冲一个周期的平均值。运用该原理,如果能控制电路上的开关设计(半导体管、MOSFET、IGBT等)的打开时间(关闭时间),就能够调节LED电流的效率。这就是接下来要介绍的PWM控制。PWM信号的应用 PWM控制电路的一个特征是只要改变脉冲幅度就能控制各种输出。图2的降压电路帮助理解PWM的控制原理。在这个电路中,将24V的输入电压转换成12V,需要增加负载。负载就是单纯的阻抗。电压转换电路的方法有很多,运用PWM信号的效果如何呢?
图2 降压电路 在图2的降压电路中取PWM控制电路,如图3所示。MOSFEL作为开关设计使用。当PWM信号的转换频率数为20kHz时,转换周期为50μs。PWM信号为High的时候,开关为On,电流从输入端流经负载。当PWM信号处于Low状态时,开关Off,没有输入和输出,电流也断掉。 这里尝试将PWM信号的占空比固定在50%,施加在开关中。 开关开着的时候电流和电压施加到负载上。开关关着的时候因为没有电流,所以负载的供给电压为零。如图4绿色的波形、V(OUT)可在负载中看到输出电压。 图3 运用PWM信号的降压电路
双环反馈控制的 SPWM 逆变电源中电流环的设计 陈元娣,朱忠尼,林 洁 (空军雷达学院电子对抗系, 武汉 430019 摘要:针对目前电流环的设计方法不明确的问题, 通过建立 DC/AC系统的动态模型并对该模型进行理 论上的推导和分析得出了电流环的设计方法. 该方法在系统参数不完全明确的情况下, 电流内环尽量采取 PI 调节器, 将使系统的稳定性更好, 参数调整比较方便, 能满足一定的带宽和动态特性. 通过仿真实验验证了理论推导的正确性. 关键词:逆变器 ; 双环反馈 ; 电流环中图分类号:TM464 文献标识码:A 近年来, SPWM 正弦波逆变器的反馈控制技术发生 2个较大变化, ①单环控制变为多环控制, ②有效值恒定反馈变为“瞬时” 值反馈, 目的是为了提高系统的动态响应速度和改善并控制在任意负载, 特别是非线性负载下的输出波形 . 对于双环 系统, 一般采取电压外环, 电流内环的设计. 电压环的作用是跟踪和稳定输出电压,它的设计大多采取 PI 调节器模式. 电流环的作用是使逆变器的动态响应加快, 负载适应能力加强, 并具有输出电流限制能力, 可提高系统的可靠性, 因此, 电流环的设计是双环反馈控制的关键技术之一.对于电流环的设计, 常见有 P 和 PI 2种设计方法 , 在实际应用中到底选哪种方法合适,目前还没有成熟的结论. 本文通过建立 DC/AC系统的动态模型, 对该模型进行理论上的简化和特性分析.理论分析表
明:在系统参数不完全明确的情况下, 电流内环尽量采取 PI 调节器; 当系统参数基本明确或系统的惯性较小 (如大功率逆变器情况下, 可以考虑采取 P 调节器, 可以降低系统的调节难度, 提高系统的响应速度.通过对实际系统的仿真验证了本文结论的正确性. 1系统动态模型的简化设计原则 图 1是 SPWM 正弦波逆变器的功率电路原理 框图. 图 2是其等效模型, 图中 T 1=L /r 为滤波器电感的时间常数, r 为滤波电感直流电阻, T 为电压检测电路 的延迟时间常数, LT 为电流环, SPWM 控制器加逆 变器的等效模型为 G 1= K PWM U ab s Ls +r s s
题目七电流滞环跟踪PWM(CHBPWM)控制技术 的仿真 摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。 关键词:电流滞环控制脉宽控制滞环宽度控制法 一、前言 应用PWM控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM控制技术都是以输出电压近似正弦波为目标的。但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 二、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。 图1 电流滞环跟踪控制的A相原理图
图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流i*a 与输出电流i a进行比较,电流偏差?i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。B、C二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。 ?如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增 大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持 导通,使继续增大 ?直到达到i a= i*a+ h,?i a = –h,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时,,到达滞环偏差的下限值,使HBC 再翻转,又重复使导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图2 中可以看到,输出电流是十分接近正弦波的。 图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和