速度方向可控步进电机说明书
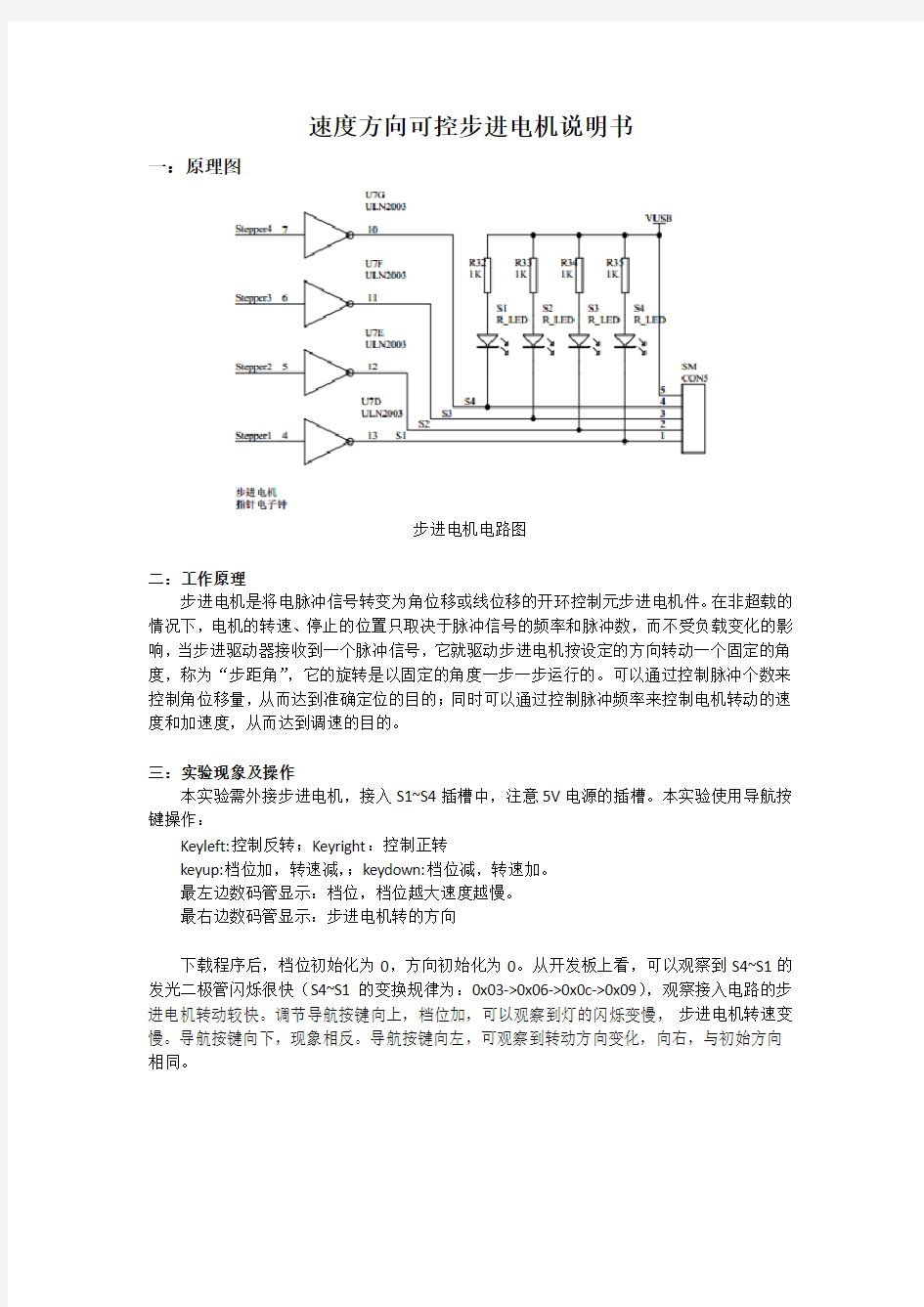
一:原理图
步进电机电路图
二:工作原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
三:实验现象及操作
本实验需外接步进电机,接入S1~S4插槽中,注意5V电源的插槽。本实验使用导航按键操作:
Keyleft:控制反转;Keyright:控制正转
keyup:档位加,转速减,;keydown:档位减,转速加。
最左边数码管显示:档位,档位越大速度越慢。
最右边数码管显示:步进电机转的方向
下载程序后,档位初始化为0,方向初始化为0。从开发板上看,可以观察到S4~S1的发光二极管闪烁很快(S4~S1的变换规律为:0x03->0x06->0x0c->0x09),观察接入电路的步进电机转动较快。调节导航按键向上,档位加,可以观察到灯的闪烁变慢,步进电机转速变慢。导航按键向下,现象相反。导航按键向左,可观察到转动方向变化,向右,与初始方向相同。
步进电机的速度控制 步进电机区别于其他控制用途电机的最大特点是,它可接受数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,因而本身就是一个完成数字模拟转化的执行元件。而且它能进行开环位置控制,输入一个脉冲信号就得到一个规定的位置增量。这样的增量位置控制系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。因此,步进电机广泛应用于数控机床、机器人、遥控、航天等领域,特别是微型计算机和微电子技术的发展,使步进电机获得更为广泛的应用。 步进电机的速度特性 步进电机的转速取决于脉冲频率、转子齿数和拍数。其角速度与脉冲频率成正比,而且在时间上与脉冲同步。因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。由于步进电机是借助它的同步转矩而启动的,为了不发生失步,启动频率是不高的。特别是随着功率的增加,转子直径增大,惯量增大,启动频率和最高运行频率可能相差10倍之多。 为了充分发挥电机的快速性能,通常使电机在低于启动频率下启动,然后逐步增加脉冲频率直到所希望的速度,所选择的变化速率要保证电机不发生失步,并尽量缩短启动加速时间。为了保证电机的定位精度,在停止以前必须使电机从最高速度逐步减小脉冲率降到能够停止的速度(等于或稍大于启动速度)。因此,步进电机拖动负载高速移动一定距离并精确定位时,一般来说都应包括“启动-加速-高速运行(匀速)-减速-停止”五个阶段,速度特性通常为梯形,如果移动的距离很短则为三角形速度特性,如图1所示。 图1 步进电机的速度曲线 步进电机控制系统结构 PC机在适当的时刻通过对硬件控制电路上的8253计数器0赋初值,设置好加减速过程的频率变化(即速度、加速度变化),以防止失步。例如,在点位控制中设置好速度曲线图,在起动和升速时,使步进电机产生足够的转矩驱动负载,跟上规定的速度和加速度;在减速时,下降特性使负载不产生过冲,停止在规定的位置。硬件控制电路板上的8253产生脉冲方波作为中断信号源,启动细分驱动电路中的固化程序以产生一定频率的脉冲,经功率放大后驱动步进电机运动。步进电机运动方向的改变及启动和停止均由计算机控制硬件控制电路实现。 图2 步进电机控制系统 软件和硬件结合起来一起进行控制,具有电路简单、控制方便等优点。在这种控制中,微机软件占用的存储单元少,程序开发不受定时限制。只要外部中断允许,微机就能在电机的每一步之间自由地执行其他任务,以实现多台步进电机的运动控制。 定时器初值的确定 步进电机的实时控制运用PC机,脉冲方波的产生采用8253定时器,其计数器0工作于方式0以产生脉冲方波,计数器 1工作于方式1起记数作用,8253计数器0的钟频由2MHz晶振提供。设计算机赋给8253计数器0的初值为D1,则产生的脉冲方波频率为f1=f0/D1,周期为T1=1/f1=D1/f0,D1=f0T1=f0/f1。其中,f1为启动频率,f0为晶振频率。步进电机升降速数学模型为使步进电机在运行中不出现失步现象,一般要求其最高运行频率应小于(或等于)步进响应频率fs。在该频率下,步进电机可以任意启动、停止或反转而不发生失步现象。步进电机升降速有两种驱动方式,即三角形与梯形驱动方式(见图1),而三角形驱动方式是梯形驱动的特例,因而我们只要研究梯形方式。电机的加速和减速是通过计算机不断地修改定时器初值来实现的。在电机加速阶段,从启动瞬时开始,每产生一个脉冲,定时器初值减小某一定值,则相应的脉冲周期减小,即脉冲频率增加;在减速阶段,定时器初值不断增加,
步进电机,伺服电机可编程控制器KH-01使用说明 一、系统特点 ●控制轴数:单轴; ●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制); ●最高输出频率:40KHz(特别适合控制细分驱动器); ●输出频率分辨率:1Hz; ●编程条数:99条; ●输入点:6个(光电隔离); ●输出点:3个(光电隔离); ●一次连续位移范围:—7999999~7999999; ●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态; ●升降速曲线:2条(最优化); ●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示; ●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止; ●手动运行功能:可调整位置(手动的点动速度和点动步数可设定); ●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度; ●程序编辑功能:可任意插入、删除可修改程序。具有跳转行号、数据判零、语句条数超长和超短的判断功能; ●回零点功能:可双向自动回到零点; ●编程指令:共14条指令; ●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作; ●电源:AC220V(电源误差不大于±15%)。
一、前面板图 前面板图包括: 1、八位数码管显示 2、六路输入状态指示灯 3、三路输出状态指示灯 4、 CP脉冲信号指示灯
5、 CW方向电平指示灯 6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。 后面板图及信号说明: 后面板图为接线端子,包括: 1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中: 脉冲————步进脉冲信号 方向————电机转向电平信号 +5V————前两路信号的公共阳端 CP、CW的状态分别对应面板上的指示灯 2、启动:启动程序自动运行,相当于面板上的启动键。 3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。 4、 (限位A)A操作和(限位B)B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。再例如要求步进电机在两个行程开关之间往复运行n次,等等。在这些操作中,我们事先并不知道步进电机的位移量的具体值,又应当如何编程呢?本控制器利用:“中断操作”,我们称之为“(限位A)A操作”和“(限位B)B操作”。以“(限位A)A操作”为例,工作流程为:当程序在运行时,如果“(限位A)A 操作”又信号输入,电机作降速停止,程序在此中断,程序记住了中断处的座标,程序跳转到“(限位A)A操作”入口地址所指定的程序处运行程序。 5、输入1和输入2通过开关量输入端。 6、输出1、输出2和输出3通过开关量输出端。 7、+24V、地—输入输出开关量外部电源,本电源为DC24V/0.2A,此电源由控制器内部隔离提供。 8、 ~220V控制器电源输入端。 输入信号和输出信号接口电路: 本控制器的“启动”、“停止”、“(限位A)A操作”、“(限位B)B操作”、“输入1”、“输入2”为输入信号,他们具有相同的输入接口电路。“输出1”、“输出2”、“输出3”称为输出信号。他们具有相同的输出接口电路。输入和输出电路都有光电隔离,以保证控制器的内部没有相互干扰,控制器内部工作电源(+5V)和外部工作电源(+24V)相互独立,并没有联系,这两组电源由控制器内部变压器的两个独立绕组提供。 开关量输入信号输出信号的状态,分别对应面板上的指示灯。对于输入量,输入低电平(开关闭合时)灯亮,反之灯灭;对于输出量,输出0时为低电平,指示灯灭,反之灯亮。 开关量输入电路:
文件编号:TP-AR-L2541 In Terms Of Organization Management, It Is Necessary To Form A Certain Guiding And Planning Executable Plan, So As To Help Decision-Makers To Carry Out Better Production And Management From Multiple Perspectives. (示范文本) 编订:_______________ 审核:_______________ 单位:_______________ 基于单片机步进电机速 度控制研究(正式版)
基于单片机步进电机速度控制研究 (正式版) 使用注意:该安全管理资料可用在组织/机构/单位管理上,形成一定的具有指导性,规划性的可执行计划,从而实现多角度地帮助决策人员进行更好的生产与管理。材料内容可根据实际情况作相应修改,请在使用时认真阅读。 本文对步进机一个全面的介绍,再基于单片机对 步进电机的控制。本文采用硬件控制系统,通过单片 机MC9S12XS128与光电编码器对步进电机进行速度的 控制。最后对步进电机的速度曲线进行研究。 步进电机又称为脉冲电动机或者阶跃电动 机,作为执行元件,是机电一体化的关键产品之一, 广泛应用于各种自动化控制系统之中,比如当今电子 钟表、工业机械手、包装机械和汽车制动元件的测试 中等。步进电机在未来应用前景会往更加小型化、从 圆形电动机往方形电动机和四相、五相往三相电动机
发展。而这便需要对步进电机的控制提出了更高的要求。 1.步进电机综合介绍 1.1.步进电机分类 步进电动机的种类很多,从广义上讲,步进电机的类型分为机械式、电磁式和组合式三大类型。按结构特点电磁式步进电机可分为反应式(VR)、永磁式(PM)和混合式(HB)三大类;按相数分则可分为单相、两相和多相三种。目前使用最为广泛的为反应式和混合式步进电机。 1.1.1.反应式步进电机 反应式步进电机的转子是由软磁材料制成的,转子中没有绕组。一般为三相,可实现大扭矩的输出,步进角一般为1.5度。它的结构简单,成本低,但噪音大。
目录 1 总体方案的确定 (1) 1.1 对步进电机的分析 (1) 1.2 电机的控制方案 (2) 1.3 控制算法的方案 (3) 1.4 串口通讯的模拟 (3) 2 硬件的设计与实现 (4) 2.1 微处理器的选择 (4) 2.2 控制电路的实现 (4) 2.3 键盘和显示电路 (6) 3 软件的设计与实现 (6) 3.1 控制信号输入程序 (7) 3.2 步进电机控制程序设计 (8) 3.3 程序分析及说明 (9) 4 系统的仿真与调试 (10) 4.1 程序的调试 (11) 4.2 串口通信的调试 (11) 4.3 调试结果及分析 (11) 5 设计总结 (13) 参考文献 (14) 附录 (15)
步进电机速度控制系统设计报告 1 总体方案的确定 系统以单片机为核心,接收并分析来自键盘或串口的控制指令,经过CPU 的逻辑计算输出控制信息,让步进电机按要求转动。由于步进电机是开环元件,系统不需反馈环节,但也同时要求控制信号足够精确。此外,为实现单片机与电机之间信号对接,需要加入步进电机驱动单元。 1.1 对步进电机的分析 步进电机又叫脉冲电机,它是一种将电脉冲信号转化为角位移的机电式数模转换器。在开环数字程序控制系统中,输出控制部分常采用步进电机作为驱动元件。步进电机控制线路接收计算机发来的指令脉冲,控制步进电机做相应的转动,步进电机驱动数控系统的工作台或刀具。很明显,指令脉冲的总数就决定了数控系统的工作台或刀具的总位移量,指令脉冲的频率决定了移动的速度。因此,指令脉冲能否被可靠地执行,基本上取决于步进电机的性能。 步进电机的工作就是步进转动。在一般的步进电机工作中,其电源都是采用单极性的直流电源。要是步进电机转动,就必须对步进电机定子的各相绕组以适当的时序进行通电。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,即可达到调速的目的。本设计是用单片机输出可调脉冲作为单片机的控制信号,通过改写脉冲频率调节单片机转速。 常见的步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB),永磁式步进一般为两相,转矩和体积较小;反应式步进一般为三相,可实现大转矩输出,但噪声和振动都很大。混合式步进是指混合了永磁式和反应式的优点,它又分为两相和五相,应用最为广泛。单片机管脚输出电压一般不足以驱动步进电机转动,所以需要在单片机和步进电机之间加入驱动电路。
基于单片机步进电机速度控制研究参考文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
基于单片机步进电机速度控制研究参考 文本 使用指引:此安全管理资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 本文对步进机一个全面的介绍,再基于单片机对步进 电机的控制。本文采用硬件控制系统,通过单片机 MC9S12XS128与光电编码器对步进电机进行速度的控 制。最后对步进电机的速度曲线进行研究。 步进电机又称为脉冲电动机或者阶跃电动机,作为 执行元件,是机电一体化的关键产品之一,广泛应用于各 种自动化控制系统之中,比如当今电子钟表、工业机械 手、包装机械和汽车制动元件的测试中等。步进电机在未 来应用前景会往更加小型化、从圆形电动机往方形电动机 和四相、五相往三相电动机发展。而这便需要对步进电机 的控制提出了更高的要求。
1.步进电机综合介绍 1.1.步进电机分类 步进电动机的种类很多,从广义上讲,步进电机的类型分为机械式、电磁式和组合式三大类型。按结构特点电磁式步进电机可分为反应式(VR)、永磁式(PM)和混合式(HB)三大类;按相数分则可分为单相、两相和多相三种。目前使用最为广泛的为反应式和混合式步进电机。 1.1.1.反应式步进电机 反应式步进电机的转子是由软磁材料制成的,转子中没有绕组。一般为三相,可实现大扭矩的输出,步进角一般为1.5度。它的结构简单,成本低,但噪音大。 1.1. 2.永磁式步进电机 永磁式步进电机的转子是用永磁材料制成,转子本身就是一个磁源。转子的极数和定子的极数相同,所以一般步距角比较大,步进角一般为7.5度或15度。它输出转
大连理工大学本科设计报告题目:步进电机转速控制系统设计 课程名称:单片机综合设计 学院(系):电子信息与电气工程学部 专业: 班级: 学号: 学生姓名: 成绩: 2013 年7 月20 日
题目:步进电机转速控制系统设计 1 设计要求 1)利用ZLG7290的键盘控制直流电机(或步进电机的转速、转向); 2)也可以利用ADC模块(与电位器配合),利用电位器控制转速; 3)利用ZLG7290的8位LED数码管显示电机转向、转速参数显示。 2 设计分析及系统方案设计 实验要求使用步进电机作为被控制对象,由ZLG7290做人机对话平台,利用单片机的P1(8位)和P3(部分口线)构造系统。实验最终实现功能、设计思路以及方案设计如以下几个小节所述。 2.1 系统设计实现功能 根据设计要求、现有设备以及知识储备,完成功能如下: ①由按键S1~S8实现转速切换,其中S1~S4正转,S5~S8反转 ②按键S16作为停止键,按下S10后步进电机停止转动,再按S1~S16步进电机按 照按键对应转速以及转向转动 ③按键S10作为复位键,当按下S10后,无论当前处于何种状态,系统恢复至初 始态 ④8为LED数码管显示当前步进电机转速(speed=0/1 1~4),转速前0表示正转, 1表示反转 ⑤若按下停止键,数码管显示当前转速;若按下复位键,数码管显示初始态speed=00 2.2 设计思路 本次的设计是LED显示与步进电机相结合以及若干功能键的组合的一种设计。根据之前学习的按键中断显示实验和定时器实验,使用INT0和INT1,INT0作为按键中断,INT1作为定时器。在主程序中实现LED初始显示、定时器计时初始、按键中断初始。INT0中断调用中断服务子程序实现对按键键值的判断,并根据相应的按键值实现对应步进电机的变化,并显示该按键对应的转速。INT1定时器中断根据INT0的按键键值,对定时器设定相应的初值,实现步进电机按规定的转速转动。对于按键停止,则是利用中断优先级,当INT0的中断优先级高时,系统进入中断,此时INT1停止计时,也就实现了步进电机的停止,当改变定时器与按键中断的优先级时,即把INT0设为低优先级,INT1设为高优先级,步进电机重新开始转动。此时添加一个对INT0位地址的查询,若有按键即正/反转的4档转速所对应的按键,步进电机开始重新转动。对于复位功能,则同样是利用按键键值的判断,在对应键值下控制电机初始化。
步进电机的速度控制 步进电机是一种能将脉冲信号转换成角位移或线位移的执行器件,广泛应用于各种工业设备中。步进电机的角位移或线位移与控制脉冲数成正比。通过改变脉冲频率就可以调节电机的转速,实现电机的加减速,转向等。 在实际步进电机应用中,尤其在要求快速响应的控制系统中,其关键问题是如何保证步进电机在运行过程中不发生失步。 调速电动机控制系统按其功能分为以下几个部分:中央处理器首选8051系列单片机;测速电路;A/D转换电路;供电电路;过零脉冲的形成电路;可控硅的触发电路;通信串行接口电路;显示接口电路以及时钟复位电路。 步进脉冲的调频方法 1、软件延时:通过调用标准的延时子程序来实现。优点是程序简单,不占硬件资源,缺点是浪费CPU的宝贵时间,在控制过程中,CPU不能做其他的事。 2、硬件定时:假设控制器为AT89S52单片机,晶振频率为12MHZ,将T0作为定时器使用,设定T0工作在模式1(16为定时/计数器)。只需要改变T0的定时常数,就可以实现步进电机的调速。 步进电机的速度控制规律: 1、按梯形规律升降,即步进电机的转速每跃进一个台阶后,恒速行驶一段时间。这种方法的缺点是在恒速阶段没有加速,为充分利用步进电机的加速性能,而且高频阶段加速台阶高,步进电机在速度阶跃时会发生失步。 2、按直线规律升降速方式,由于这种升速方法的及速度是恒定的,其缺点是未充分考虑步进电机输出力矩随速度变化的特性,步进电机高速时会发生失步。 3、第三种是按指数规律升降速,在以微处理器为核心的驱动器中,常用定时常数递减(递加)的方法实现升降速,升速曲线成上凹形,低频时升速太慢,高速时升速太快。 (注:素材和资料部分来自网络,供参考。请预览后才下载,期待你的好评与关注!)
步进电机只能够由数字信号控制运行的,当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机堵转。要解决这个问题,必须采用加减速的办法。就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐减低。这就是我们常说的“加减速”方法。 步进电机转速度是根据输入的脉冲信号的变化来改变的,从理论上讲,给驱动器一个脉冲,步进电机就旋转一个步距角(细分时为一个细分步距角)。实际上,如果脉冲信号变化太快,步进电机由于内部的反向电动势的阻尼作用,转子与定子之间的磁反应将跟随不上电信号的变化,将导致堵转和丢步。 所以步进电机在高速启动时,需要采用脉冲频率升速的方法,在停止时也要有降速过程,以保证实现步进电机精密定位控制。加速和减速的原理是一样的。以加速实例加以说明:加速过程是由基础频率(低于步进电机的直接起动最高频率)与跳变频率(逐渐加快的频率)组成加速曲线(降速过程反之)。跳变频率是指步进电机在基础频率上逐渐提高的频率,此频率不能太大,否则会产生堵转和丢步。 步电机系统解决方案
加减速曲线一般为指数曲线或经过修调的指数曲线,当然也可采用直线或正弦曲线等。使用单片机或者PLC,都能够实现加减速控制。对于不同负载、不同转速,需要选择合适的基础频率与跳变频率,才能够达到最佳控制效果。指数曲线,在软件编程中,先算好时间常数存贮在计算机存贮器内,工作时指向选取。通常,完成步进电机的加减速时间为300ms以上。如果使用过于短的加减速时间,对绝大多数步进电机来说,就会难以实现步进电机的高速旋转。 深圳市维科特机电有限公司成立于2005年,是步进电机产品的销售、系统集成和应用方案提供商。我们和全球产品性价比高的生产厂家合作,结合本公司专家团队多年的客户服务经验,给客户提供有市场竞争力的步进电机系统解决方案。我们的主要产品有信浓(SHINANO KENSHI)混合式步进电机、日本脉冲(NPM)永磁式步进电机、减速步进电机、带刹车步进电机、直线步进电机、空心轴步进电机、防水步进电机以及步进驱动器、减振垫、制振环、电机引线、拖链线、齿轮、同步轮、手轮等专业配套产品。我们还供应德国TRINAMIC驱动芯片和日本NPM运动控制芯片。根据客户配套需要,我们还可以 步电机系统解决方案
1 引言 在工业控制系统里步进电动机是主要的控制元件之一。步进电机具有快速启动停止,精确定位和能够使用数字信号进行控制,能够实现脉冲-角度转换的特点,因此得到广泛的应用。在使用步进电机的控制系统里,脉冲分配器产生周期的控制脉冲序列,步进电机驱动器每接收一个脉冲就控制步进电机沿给定方向步进一步。 本实验旨在通过控制AT89S52芯片,实现对四相步进电机的转动控制。具体功能主要是控制电机正转、反转、加速与减速。 具体工作过程是:给试验箱上电后,拨动启动开关,步进电机按照预先设置的转速和转动方式转动。调整正反转按钮,步进电机实现正反转切换;拨动加速开关,步进电机转速加快,速度达到最大值,不再加速;拨动减速开关时,电机减速转动,速度减到最小速度,停止减速。 2 四相步进机 2.I 步进电机 步进电机是一种将电脉冲转化为角位移的执行机构。电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。 2.2 步进电机的控制
1.换相顺序控制:通电换相这一过程称为脉冲分配。例如:混合式步进电机 的工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。 2.控制步进电机的转向控制:如果给定工作方式正序换相通电,步进电机正 转,如果按反序通电换相,则电机就反转。 3.控制步进电机的速度控制:如果给步进电机发一个控制脉冲,它就转一步, 再发一个脉冲,它会再转一步。两个脉冲的间隔越短,步进电机就转得越快。 2.3 步进电机的工作过程 图2.1步进电机设计图 开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。 而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。 依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。 四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。 八拍工作方式的电源通电时序与波形如图所示:
可编辑 步进电机的速度控制 步进电机是一种能将脉冲信号转换成角位移或线位移的执行器件,广泛应用于各种工业设备中。步进电机的角位移或线位移与控制脉冲数成正比。通过改变脉冲频率就可以调节电机的转速,实现电机的加减速,转向等。 在实际步进电机应用中,尤其在要求快速响应的控制系统中,其关键问题是如何保证步进电机在运行过程中不发生失步。 调速电动机控制系统按其功能分为以下几个部分:中央处理器首选8051系列单片机;测速电路;A/D转换电路;供电电路;过零脉冲的形成电路;可控硅的触发电路;通信串行接口电路;显示接口电路以及时钟复位电路。 步进脉冲的调频方法 1、软件延时:通过调用标准的延时子程序来实现。优点是程序简单,不占硬件资源,缺点是浪费CPU的宝贵时间,在控制过程中,CPU不能做其他的事。 2、硬件定时:假设控制器为AT89S52单片机,晶振频率为12MHZ,将T0作为定时器使用,设定T0工作在模式1(16为定时/计数器)。只需要改变T0的定时常数,就可以实现步进电机的调速。 步进电机的速度控制规律: 1、按梯形规律升降,即步进电机的转速每跃进一个台阶后,恒速行驶一段时间。这种方法的缺点是在恒速阶段没有加速,为充分利用步进电机的加速性能,而且高频阶段加速台阶高,步进电机在速度阶跃时会发生失步。 2、按直线规律升降速方式,由于这种升速方法的及速度是恒定的,其缺点是未充分考虑步进电机输出力矩随速度变化的特性,步进电机高速时会发生失步。 3、第三种是按指数规律升降速,在以微处理器为核心的驱动器中,常用定时常数递减(递加)的方法实现升降速,升速曲线成上凹形,低频时升速太慢,高速时升速太快。 . . 精品
课程设计报告 题 目: 步进电机转速控制显示系统 学生姓名: 陶宁 学生学号: 0908020132 1该设计要求通过程序实现单片机对电动机进行控制。共包含五个键盘,分别操控正转、反转、停止、加速、减速。并且讲电动机的转动状态反映在LCD 上。 1.3 课程设计的研究基础 2步进电机转速控制显示系统方案制定 2.1 方案提出 方案一:使用开关直接控制电动机的正反转以及转速控制,此种设计非常简便易操作,共两个开关控制。
方案一:本方案十分简单,除了实现正常的正转反转,只能实现步进电机的正转加速,还有反转减速,并不能实现正转减速或者反转加速等功能。程序设计上比较简单,实用性不大。 方案二:本方案较方案一复杂些,并且成功的实现了电机的正转加速和减速,反转的加速和减速,简单明了,控制范围更大,实用性更强。但是由于复杂性增加,程序的编写难度上就增加了。 2.3 方案论证
对于以上两个方案比较分析得出:方案二成功的实现了方案一所有的功能,而且其他功能上更加全面。使用上也更加易操作。方案一对于简单的应用可以适用,但局限性很大,有时无法实现必要的功能。 2.4 方案选择 根据以上的比较论证,选择方案二。 3 步进电机转速控制显示系统方案设计 3.1各单元模块功能介绍及电路设计 该设计分为控制模块,驱动模块,显示模块。 ,从而 —Falsh AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。 1)主要特性 a.与MCS-51 兼容 b.4K字节可编程闪烁存储器 c.寿命:1000写/擦循环 d.数据保留时间:10年 e.全静态工作:0Hz-24Hz f.三级程序存储器锁定
步进电机的速度控制及运动规律
步进电机的速度控制及运动规律 步进电机区别于其他控制用途电机的最大特点是,它可接受数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,因而本身就是一个完成数字模拟转化的执行元件。 而且它能进行开环位置控制,输入一个脉冲信号就得到一个规定的位置增量。这样的增量位置控制系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。因此,步进电机广泛应用于数控机床、机器人、遥控、航天等领域,特别是微型计算机和微电子技术的发展,使步进电机获得 更为广泛的应用。 步进电机的速度特性 步进电机的转速取决于脉冲频率、转子齿数和拍数。其角速度与脉冲频率成正比,而且在时间上与脉冲同步。因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。由于步进电机是借助它的同步转矩而启动的,为了不发生失步,启动频率是不高的。特别是随着功率的增加,转子直径增大,惯量增大,启动频率和最高运行频率可能相差10倍之多。 为了充分发挥电机的快速性能,通常使电机在低于启动频率下启动,然后逐步增加脉冲频率直到所希望的速度,所选择的变化速率要保证电机不发生失步,并尽量缩短启动加速时间。为了保证电机的定位精度,在停止以前必须使电机从最高速度逐步减小脉冲率降到能够停止的速度(等于或稍大于启动速度)。因此,步进电机拖动负载高速移动一定距离并精确定位时,一般来说都应包括“启动-加速-高速运行(匀速)-减速-停止”五个阶段,速度特性通常为梯形,如果移动的距离很短则为三角形速度特性,如 图1所示。 图1 步进电机的速度曲线 步进电机控制系统结构 PC机在适当的时刻通过对硬件控制电路上的8253计数器0赋初值,设置好加减速过程的频率变化(即速度、加速度变化),以防止失步。例如,在点位控制中设置好速度曲线图,在起动和升速时,使步进电机产生足够的转矩驱动负载,跟上规定的速度和加速度;在减速时,下降特性使负载不产生过冲,停止在规定的位置。硬件控制电路板上的8253产生脉冲方波作为中断信号源,启动细分驱动电路中的固
学校代码:10128 学号: 课程设计题目:步进电机速度控制器设计学生姓名: 学院:机械学院 系别:测控系 专业:测控技术与仪器 班级: 指导教师: 2011年01月20日
摘要 步进电动机是一种将电脉冲信号转换成角位移或线位移的精密执行元件,具有快速起动和停止的特点。其驱动速度和指令脉冲能严格同步,具有较高的重复定位精度, 并能实现正反转和平滑速度调节。它的运行速度和步距不受电源电压波动及负载的影响, 因而被广泛应用于数模转换、速度控制和位置控制系统。本文在分析了步进电机的驱动特性、斩波恒流细分驱动原理和混合式步进电机驱动芯片L297/L298的性能、结构的基础上,结合AT89C52单片机,设计出了混合式步进电机驱动电路。 关键词:步进电机;AT89C52单片机;L297/L298驱动。
Abstract Stepping motors is a kind of will convert angular displacement or electrical impulses signal line displacement of precision actuator, have fast start and stop characteristics. The driving speed and instructions pulse can strictly synchronization, which has high repositioning precision, and can realize the positive &negative and smooth adjustable speed. Its operation speed and step distance from supply voltage fluctuation and load effect, which have been widely applied in analog-to-digital conversion, speed control and the position control system. Based on the analysis of the stepper motor driving characteristics, a chopper constant-current subdivided driving principle and hybrid stepping motor drive chip L297 / L298 the performance, structure in the foundation, the union AT89C52 single chip computer, designed a hybrid stepping motor driver circuit. Key words:Stepping motor; AT89C52 single chip computer; L297 / L298 driver. 目录 第一章绪论 (1) 1.1课题背景 (1)
步进电机运动规律及速度控制方法 姓名:吴良辰班级:10机设(2)学号:201010310206 学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。了解最新控制技术在机械设备中的应用。在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。机电系统一般可分为图一所示的三个部分。 图1机电传动控制 在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。上完这门让我更详细了解他们内部的结构和工作原理。还说明知识是慢慢积累的过程。见的多学的多。我明白了很多以前的疑惑。看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。尤其是日本的机器人。它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。我觉的两者都有。 很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。所以步进电机是个好东西。我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。很遗憾的是它是国外人发明的。 开始写正题了,上完这门课,那个步进电机是让我很痴迷的。步进电机在位置控制,速度,控制方面有着卓越的作用,是其他电机无法比拟的。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
如何实现步进电机中的速度调节控制设计 引言 对步进电机的控制是经济型数控系统开发时的一项重要内容,其中对步进电机运动过程中的升降速控制是重点。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 1 步进电机动态特性分析 由于步进电机的输出转矩随步进频率的增加而减少,根据步进电机的动态特性,可以通过其动力模型(二阶微分)描述:式中:J—系统的总转动惯量θ—转子的转角β—阻尼系数k—与θ成某种函数关系的比例因子Tz—摩擦阻力矩及其它与β无关的阻力矩之和Td—步进电机所产生的电磁驱动转矩式中,—惯性扭矩—角加速度显然,惯性扭矩应小于最大电磁转矩Td,在升速阶段角加速度越大越好,使得到达匀速的时间越短,但在加速阶段为了减小对系统的冲击不应该突变,故在不失步的前提之下,在加速阶段
实训名称步进电机控制 一、实训目的 1.掌握步进电机控制系统的接线、调试、操作 二、实训设备 序号名称型号与规格数量备注 1实训装置THHAJS-1 1 2实训挂箱B10 1 3导线3号若干 4 5通讯编程电缆SC-90 1 三菱 6实训指导书THHAJS-1 1 7计算机(带编程软件) 1 自备 三、面板图 + 四、控制要求 1.总体控制要求:如面板图所示,利用可编程控制器输出信号控制步进电机运行。 2.按下“SD”启动开关,系统准备运行。 3.打开“MA”手动开关,系统进入手动控制模式,选择电机旋转方向,再按动“SE”单步按钮,步进电机运行一步。 4.关闭“MA”手动开关,系统进入自动控制模式,此时步进电机开始自动运行。 5.分别按动速度选择开关“V1”、“V2”、“V3”,步进电机运行在不同的速度段上。 6.步进电机开始运行时为正转,按动“MF”开关,步进电机反方向运行。再按动“MZ”
开关,步进电机正方向运行。 五、 功能指令使用及程序流程图 六、 端口分配及接线图 1.端口分配及功能表 序号 PLC 地址(PLC 端子) 电气符号(面板端 子) 功能说明 1 X00 SD 启动开关 2 X01 MA 手动 3 X02 V1 速度1 4 X03 V2 速度2 5 X04 V3 速度3 6 X05 MZ 正转 7 X06 MF 反转 8 X07 SE 单步 9 Y00 A A 相 10 Y01 B B 相 11 Y02 C C 相 12 Y03 D D 相 13 面板V+ 接电源+24V 电源正端 14 主机COM 、COM0、COM1、COM2接电源GND 电源负端 2.PLC 外部接线图
脉冲频率为: l/fn=Tn=Tl-(n-l)A/fO (3) 上式分别显示了脉冲数n与脉冲频率fn和时间tn的关系。令△/?)=■即加速阶段相邻两脉冲周 期的减量,则上述公式简化为: tn=(n-l)Tl-(n-2)(n-l)6/2 (4) l/fn=Tl-(n-l)6 (5) 联立(4)、(5),并简化fn与tn的关系,得出加速阶段的数学模型为: /= --- ,2B-C F A+\IB-Ct2 (6) 其中,是常数,其值与定时器初值及定时器变化量有关,A=-6, B=(2Tl+6)2,C=86o 加速阶段脉冲频率的变化为: 山(A*B — CFy/B-CF ⑺ 从(6)、(7)式可以看出,在加速阶段,脉冲频率不断升高,且加速度以二次函数增加。这种加速方法对步进电机运行十分有利,因为启动时,加速度平缓,一旦步进电机具有一定的速度,加速度增加很快。这样一方面使加速度平稳过渡,有利于提高机器的定位精度,另一方面可以缩短加速过程,提高快速性能。 对于减速阶段,按照与上述类似的分析方法,可以得出脉冲频率特性的表达方式为: ?4+jB 十Cf
# __________ — 4Cr _______ dt QA + Vfi + cr2)2 x+ Ct2 (9) 其中,A=-6, B=(2T1-6)2,C=86, T1为减速开始时脉冲周期,6为减速阶段相邻两个脉冲周期的增童。由于Tl?8,则B=4T12,由(8). (9)式可以看出,脉冲频率在减速阶段不断下降, 且加速度为负,绝对值以二次函数减小。这种减速性能对步进电机同样有利,它使步进电机在减速时能够平稳地停止而没有冲击,提髙了机器的定位精度。 综上所述,可以得出本设计的脉冲频率特性(见图3)。 图3脉冲频率特性 实验及总结 该方法己经成功的应用于本人设计的智能运动控制单元,通过开发Windows环境下的控制软件,利用VC卄设计良好的控制接口界面,方便地实现了运动方式.速度.加减速的选择和位置控制,具有一定程度的智能。该控制单元减少了PC机被占用时间,以便于在电机运行的同时去完成别的工作,从而实现了三台步进电机的加减速和速度及位置控制。并且利用了细分驱动电源,提高了步进精度和定位精度。
PLC脉冲控制步进电机技术 一、步进电机、脉冲与方向信号 步进电机作为一种常用的电气执行元件,广泛应用于自动化控制领域。步进电机的运转需要配备一个专门的驱动电源,驱动电源的输出受外部的脉冲信号和方向信号控制。每一个脉冲信号可使步进电机旋转一个固定的角度,这个角度称为步距角。脉冲的数量决定了旋转的总角度,脉冲的频率决定了旋转的速度。方向信号决定了旋转的方向。就一个传动速比确定的具体设备而言,无需距离、速度信号反馈环,只需控制脉冲的数量和频率即可控制设备移动部件的移动距离和速度;而方向信号可控制移动的方向。因此,对于那些控制精度要求不是很高的应用场合,用开环方式控制是一种较为简单而又经济的电气控制技术方案。 另外,步进电机的细分运转方式非常实用,尽管其步距角受到机械制造的限制,不能制作得很小,但可以通过电气控制的方式使步进电机的运转由原来的每个整步分成m个小步来完成,以提高设备运行的精度和平稳性。控制步进电机电源的脉冲与方向信号源常用数控系统,但对于一些在运行过程中移动距离和速度均确定的具体设备,采用PLC(可编程控制器)是一种理想的技术方案。 二、控制方案 图1 PLC脉冲控制步进电机系统示意图 在操作面板上设定移动距离、速度和方向,通过PLC的运算产生脉冲、方向信号,控制步进电机的驱动电源,达到对距离、速度、方向控制的目的,见图1。操作面板上的位置旋钮控制移动的距离,速度旋钮控制移动的速度,方向按钮控制移动的方向,启/停按钮控制电机的启动与停止。 在实际系统中,位置与速度往往需要分成几挡,故位置、速度旋钮可选用波段开关,通过对波段开关的不同跳线进行编码,可减少操作面板与PLC的连线数量,同时也减少了PLC的输入点数,节省了成本。一个n刀波段开关的最多挡位可达到2n。在对PLC选型前,应根据下式计算系统的脉冲当量、脉冲频率上限和最大脉冲数量。 根据脉冲频率可以确定PLC高速脉冲输出时需要的频率,根据脉冲数量可以确定PLC的位宽。同时,考虑到系统响应的及时性、可靠性和使用寿命,PLC应选择晶体管输出型。 步进电机细分数的选择以避开电机的共振频率为原则,一般可选择2、5、10、25细分。 编制PLC控制程序时应将传动系统的脉冲当量、反向间隙、步进电机的细分数定义为参数变量,以便现场调整。 三、应用实例