
实验五步进电机控制
一、实验目的与要求
1、了解步进电机的基本原理,掌握步进电机的转动编程方法
2、了解影响电机转速的因素有那些
二、实验设备
STAR系列实验仪一套、PC机一台。
三、实验内容
编写程序:使用G5区的键盘控制步进电机的正反转、调节转速,连续转动或转动指定步数;将相应的数据显示在G5区的数码管上。
四、控制原理
步进电机的驱动原理是通过它每相线圈的电流的顺序切换来使电机作步进式旋转,驱动电路由脉冲来控制,所以调节脉冲的频率便可改变步进电机的转速,微控制器最适合控制步进电机。另外,由于电机的转动惯量的存在,其转动速度还受驱动功率的影响,当脉冲的频率大于某一值(本实验为f.>100hz)时,电机便不再转动。
实验电机共有四个相位(A,B,C,D),按转动步骤可分单4拍(A->B->C->D->A),双4拍(AB->BC->CD->DA->AB)和单双8拍(A->AB->B->BC->C->CD->D->DA->A).
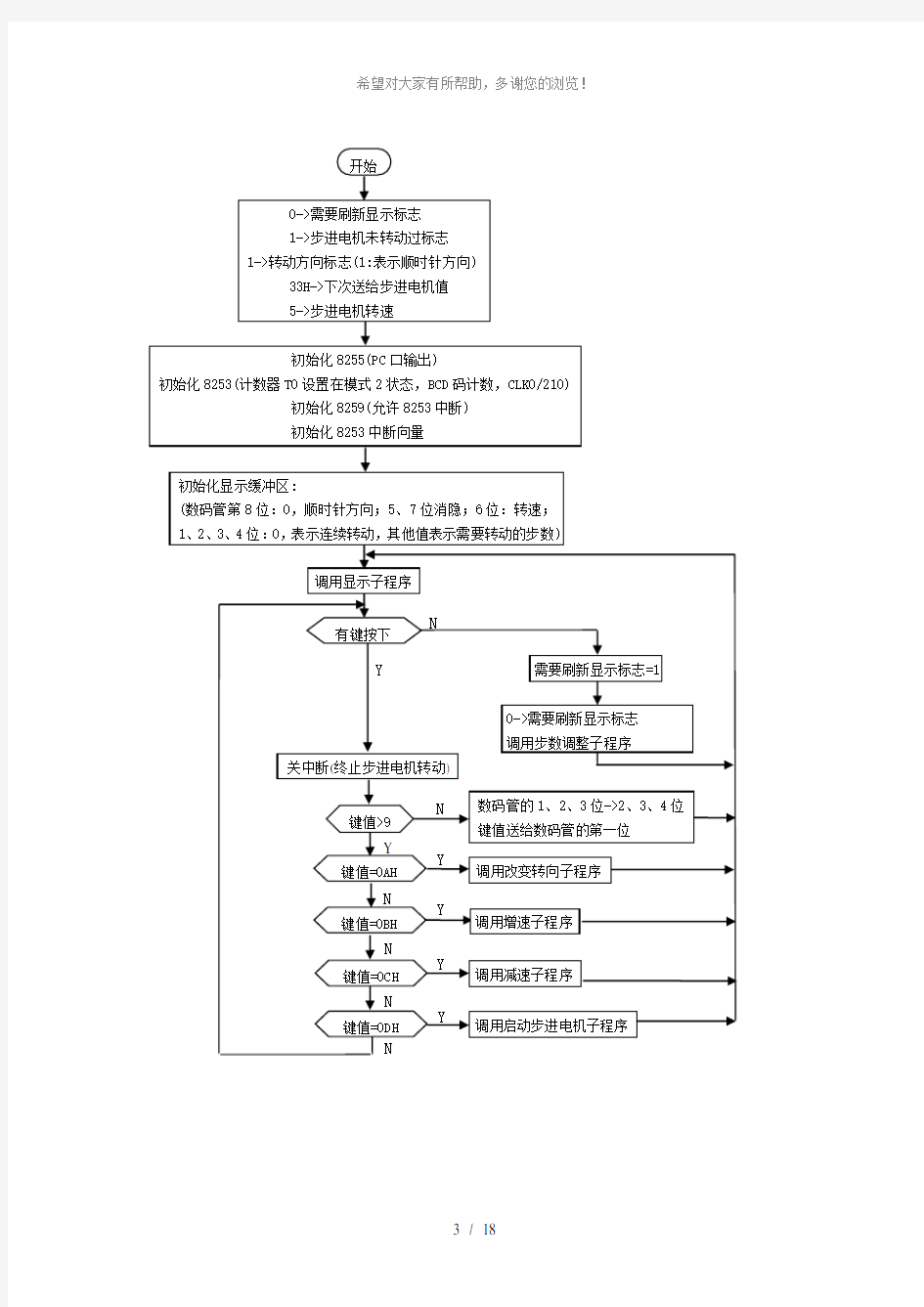
五、程序框图
改变方向子程序:
启动步进电机子程序:
增速子程序:
减速子程序:
定时中断程序:
八、演示程序
.MODEL TINY
EXTRN Display8:NEAR, SCAN_KEY:NEAR
IO8259_0 EQU 0F000H
IO8259_1 EQU 0F001H
Con_8253 EQU 0E003H
T0_8253 EQU 0E000H
IO8255_Con EQU 0D003H ;CS3
IO8255_PC EQU 0D002H
.STACK 100
.DATA
StepControl DB 0 ;下一次送给步进电机的值
buffer DB 8 DUP(0) ;显示缓冲区,8个字节
buffer1 DB 8 DUP(0) ;显示缓冲区,8个字节
SpeedNo DB 0 ;选择哪一级速度
StepDelay DB 0 ;转动一步后,延时常数StartStepDelay DB 0;若选择速度过快,延时由长到短,最终使用对应延时常数StartStepDelay1 DB 0 ;StartStepDelay
bFirst DB 0 ;有没有转动过步进电机bClockwise DB 0 ; =1 顺时针方向 =0 逆时针方向转动bNeedDisplay DB 0 ;已转动一步,需要显示新步数StepCount DW 0 ;需要转动的步数StepDelayTab: DB 250,125,83,62,50,42,36,32,28,25,22,21
.CODE
START: MOV AX,@DATA
MOV DS,AX
MOV ES,AX
NOP
MOV bFirst,1 ;有没有转动过步进电机
MOV bClockwise,1 ;顺时针方向
MOV StepControl,33H ;下一次送给步进电机的值
MOV SpeedNo,5 ;第五级速度
CALL Init8255
CALL Init8253
CALL Init8259
CALL WriIntver
MOV buffer,0 ;显示缓冲器初始化
MOV buffer+1,0
MOV buffer+2,0
MOV buffer+3,0
MOV buffer+4,10H
MOV AL,SpeedNo
MOV buffer+5,AL
MOV buffer+6,10H
MOV buffer+7,0
STAR2: LEA SI,buffer
LEA DI,buffer1
MOV CX,8
REP MOVSB
LEA SI,buffer1
CALL Display8
STAR3: CALL Scan_Key
JB STAR5
CMP bNeedDisplay,0
JZ STAR3
MOV bNeedDisplay,0
CALL Step_SUB_1
JMP STAR2
STAR5: CLI ;终止步进电机转动
CMP AL,10
JNB STAR1
MOV AH,buffer+2
MOV buffer+3,AH
MOV AH,buffer+1
MOV buffer+2,AH
MOV AH,buffer
MOV buffer+1,AH
MOV buffer,AL
JMP STAR2
STAR1: CMP AL,14
JNB STAR3
LEA SI,DriverTab
SUB AL,10
SHL AL,1
XOR AH,AH
MOV BX,AX
JMP CS:[SI+BX]
DriverTab: DW Direction ;转动方向
DW Speed_up ;提高转速
DW Speed_Down ;降低转速
DW Exec ;步进电机根据方向、转速、步数开始转动Direction: CMP bClockwise,0
JZ Clockwise
MOV bClockwise,0
MOV buffer+7,1
AntiClockwise: CMP bFirst,0
JZ AntiClockwise1
MOV StepControl,91H
JMP Direction1
AntiClockwise1: MOV AL,StepControl
ROR AL,2
MOV StepControl,AL
JMP Direction1
Clockwise: MOV bClockwise,1
MOV buffer+7,0
CMP bFirst,0
JZ Clockwise1
MOV StepControl,33H
JMP Direction1
Clockwise1: MOV AL,StepControl
ROL AL,2
MOV StepControl,AL
Direction1: JMP STAR2
Speed_up: MOV AL,SpeedNo
CMP AL,11
JZ Speed_up2
Speed_up1: INC AL
MOV SpeedNo,AL
MOV buffer+5,AL
Speed_up2: JMP STAR2
Speed_Down: MOV AL,SpeedNo
CMP AL,0
JZ Speed_Down1
DEC AL
MOV SpeedNo,AL
MOV buffer+5,AL
Speed_Down1: JMP STAR2
Exec: MOV bFirst,0
CALL TakeStepCount
LEA BX,StepDelayTab
MOV AL,SpeedNo
XLAT
MOV StepDelay,AL
CMP AL,50
JNB Exec1
MOV AL,50
Exec1: MOV StartStepDelay,AL
MOV StartStepDelay1,AL
STI
JMP STAR2
TIMER0: PUSH AX
PUSH DX
DEC StartStepDelay
JNZ TIMER0_1
MOV AL,StartStepDelay1
CMP AL,StepDelay
JZ TIMER0_2
DEC AL
MOV StartStepDelay1,AL
TIMER0_2: MOV StartStepDelay,AL
MOV AL,StepControl
MOV DX,IO8255_PC
OUT DX,AL
CMP bClockwise,0
JNZ TIMER0_3
ROR AL,1
JMP TIMER0_4
TIMER0_3: ROL AL,1
TIMER0_4: MOV StepControl,AL
CMP StepCount,0
JZ TIMER0_1
MOV bNeedDisplay,1
DEC StepCount
JNZ TIMER0_1
add sp,8 ;小写部分不允许使用单步、单步进入命令
popf
cli
pushf
sub sp,8
nop
TIMER0_1: MOV DX,IO8259_0
MOV AL,20H
POP DX
POP AX
IRET
Step_SUB_1 PROC NEAR
MOV CX,4
LEA BX,buffer
Step_SUB_1_1: DEC BYTE PTR [BX]
CMP BYTE PTR [BX],0FFH
JNZ Step_SUB_1_2
MOV BYTE PTR [BX],9
INC BX
LOOP Step_SUB_1_1
Step_SUB_1_2: RET
Step_SUB_1 ENDP
TakeStepCount PROC NEAR
MOV AL,buffer+3 ;转动步数送入StepCount
MOV BX,10
MUL BL
ADD AL,buffer+2
MUL BL
ADD AL,buffer+1
ADC AH,0
MUL BX
ADD AL,buffer
ADC AH,0
MOV StepCount,AX
RET
TakeStepCount ENDP
Init8255 PROC NEAR
MOV DX,IO8255_Con
MOV AL,80H
OUT DX,AL ;8255 PC输出
DEC DX
MOV AL,0FFH
OUT DX,AL ;0FFH->8255 PC
RET
Init8255 ENDP
Init8253 PROC NEAR
MOV DX,Con_8253
MOV AL,35H
OUT DX,AL ;计数器T0设置在模式2状态,BCD码计数
MOV DX,T0_8253
MOV AL,10H
MOV AL,02H
OUT DX,AL ;CLK0/210
RET
Init8253 ENDP
Init8259 PROC NEAR
MOV DX,IO8259_0
MOV AL,13H
OUT DX,AL
MOV DX,IO8259_1
MOV AL,08H
OUT DX,AL
MOV AL,09H
OUT DX,AL
MOV AL,0FEH
OUT DX,AL
RET
Init8259 ENDP
WriIntver PROC NEAR
PUSH ES
MOV AX,0
MOV ES,AX
MOV DI,20H
LEA AX,TIMER0
STOSW
MOV AX,CS
STOSW
POP ES
RET
WriIntver ENDP
END START
九、实验扩展及思考
1、怎样改变电机的转速?
2、通过实验找出电机转速的上限,如何能进一步提高最大转速?
3、怎样能使电机反转?
附录一 8279命令功能一览表
附录二 8279键值显示程序;8279 键盘显示器接口芯片
;1.查询控制方式 2.输入时钟2MHZ 3.8279内部20分频(100KHZ);4.扫描计数器采用编码工作方式(通过外部138译码)
;5.显示按键值,第九次按键,清除显示
; 8279 查询工作方式
.MODEL TINY
CMD_8279 EQU 0BF01H ;8279命令字、状态字地址DATA_8279 EQU 0BF00H ;8279读写数据口的地址PUBLIC GetKey, GetKeyA, GetKeyB, GetBCDKey, DisPlay8, SCAN_KEY PUBLIC F1
.STACK 100
.DATA
F1 DB ?
LED_TAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H
DB 080H,90H,88H,83H,0C6H,0A1H,86H,8EH
DB 0FFH,0BFH
.CODE
GetKey PROC NEAR
CMP CX,0
JZ GetKey5
CMP CX,9
JNB GetKey5
PUSH AX
PUSH BX
PUSH DX
PUSHF
MOV AX,CX
CLC
RCR AX,1
DEC AX
ADD DI,AX
STD
MOV AH,0
CMP F1,0
JZ GetKey1
CALL KeyScan
GetKey1: PUSH AX
MOV AL,8
CLC
SUB AL,CL
CALL INIT8279_1 ;8279初始化
POP AX
CMP F1,0
JNZ GetKey3
GetKey2: CALL KeyScan ;扫描GetKey3: NOT AH
PUSH AX
CMP AH,0
JZ GetKey4
ROR AL,4
MOV ES:[DI],AL
JMP GetKey6
GetKey4: OR AL,ES:[DI]
STOSB
GetKey6: POP AX
LEA BX,LED_TAB
XLAT
CALL WRITE_DATA ;显示输入值
LOOP GetKey2
POPF
POP DX
POP BX
POP AX
GetKey5: RET
GetKey ENDP
;键值在AL中
KeyScan PROC NEAR
CALL SCAN_KEY
JNB KeyScan
RET
KeyScan ENDP
;CY =1,有键,键值在AL中;CY=0,没有按键GetKeyA PROC NEAR
CALL SCAN_KEY
RET
GetKeyA ENDP
;键值在AL中
GetKeyB PROC NEAR
CALL SCAN_KEY
JNB GetKeyB
RET
GetKeyB ENDP
;BCD码;F1是否需要先清除显示GetBCDKey PROC NEAR
CMP CX,0
JZ GetBCDKey5
CMP CX,9
JNB GetBCDKey5
PUSH AX
PUSH BX
PUSH DX
PUSHF
MOV AX,CX
CLC
RCR AX,1
DEC AX
ADD DI,AX
STD
MOV AH,0
CMP F1,0
JZ GetBCDKey1
CALL KeyScan
GetBCDKey1: PUSH AX
MOV AL,8
CLC
SUB AL,CL
CALL INIT8279_1 ;8279初始化
POP AX
CMP F1,0
JNZ GetBCDKey3
GetBCDKey2: CALL KeyScan ;扫描GetBCDKey3: CMP AL,10
JNB GetBCDKey2
NOT AH
PUSH AX
CMP AH,0
JZ GetBCDKey4
ROR AL,4
MOV ES:[DI],AL
JMP GetBCDKey6
GetBCDKey4: OR AL,ES:[DI]
STOSB
GetBCDKey6: POP AX
LEA BX,LED_TAB
XLAT
CALL WRITE_DATA ;显示输入值
LOOP GetBCDKey2
POPF
POP DX
POP BX
POP AX
GetBCDKey5: RET
GetBCDKey ENDP
;显示以SI开始的8个数字(0~F) DisPlay8 PROC NEAR
PUSH AX
PUSH BX
PUSH CX
PUSH DX
MOV CX,8 ;计数用
LEA BX,LED_TAB
DisPlay81: MOV AL,[SI] ;不用显示的位调整
AND AL,7FH
CMP AL,11H
JZ DisPlay82 ;负号
Display84: CMP AL,16
JB DisPlay82
MOV AL,10H ;显示段码中10H位对应的是暗码
DisPlay82: XLAT
XCHG AL,[SI]
TEST AL,80H
JZ Display83
XCHG AL,[SI]
AND AL,7FH
MOV [SI],AL
Display83: INC SI
LOOP DisPlay81
MOV AL,0
CALL INIT8279_1
MOV CX,8
Display85: DEC SI
MOV AL,[SI]
CALL WRITE_DATA
LOOP Display85
POP DX
POP CX
POP BX
POP AX
RET
DisPlay8 ENDP
;8279初始化
INIT8279 PROC NEAR
MOV DX,CMD_8279 ;CMD_8279为写命令地址、读状地址
MOV AL,34H ;可编程时钟设置,设置分频系数(20分频)
几种典型的步进电机闭环控制系统 工业大学 【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。 【叙词】步进电机闭环系统/高精度定位 l概述 步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。 2步进电动机闭环系统与开环系统比较[1- 步进电机的主要优点之一是适于开环控制。在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。 但是,步进电机的开环控制无法避免步进电动机本身所固有的缺点,即共振、振荡、失步和难以实现高速。另一方面,开环控制的步进电动机系统的精度要高于分级是很困难的,其定位精度比较低。因此,在精度和稳定性标准要求比较高的系统中,就必须果用闭环控制系统。 步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。 在闭环控制的步进电机系统中,或可在具有给定精确度下跟踪和反馈时,扩大工作速度围,或可在给定速度下提高跟踪和定位精度,或可得到极限速度指标和极限精度指标。步进电动机的闭环控制性能与开环控制性能相比,具有如下优点: a.随着输出转矩的增加,二者的速度均以非线性形式下降,但是,闭环控制提高了矩频特性。 b.闭环控制下,输出功率/转矩曲线得以提高,原因是,闭环下,电机励磁转换是以转子位置信息为基础的,电流值决定于电机负载,因此,即使在低速度围,电流也能够充分转换成转矩。 c.闭环控制下,效率一转矩曲线提高。 d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。 e.利用闭环控制,步进电动机可自动地、有效地被加速和减速。 f.闭环控制相对开环控制在快速性方面提高的定量评价,可借助比较Ⅳ步通过某个路径间隔的时间得出: 式中n-步进电动机转换拍数(N>n) g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。 闭环驱动的步进电机的性能在所有方面均优于开环驱动的步进电动机。步进电机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控
步进电动机的工作原理及特点随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。 1 步进电机概述 步进电动机又称脉冲电动机或阶跃电动机,国外一般称为Steppingmotor、Pulse motor或Stepper servo,其应用发展已有约80年的历史。步进电机是一种把电脉冲信号变成直线位移或角位移的控制电机,其位移速度与脉冲频率成正比,位移量与脉冲数成正比。步进电机在结构上也是由定子和转子组成,可以对旋转角度和转动速度进行高精度控制。当电流流过定子绕组时,定子绕组产生一矢量磁场,该矢量场会带动转子旋转一角度,使得转子的一对磁极磁场方向与定子的磁场方向一着该磁场旋转一个角度。因此,控制电机转子旋转实际上就是以一定的规律控制定子绕组的电流来产生旋转的磁场。每来一个脉冲电压,转子就旋转一个步距角,称为一步。根据电压脉冲的分配方式,步进电机各相绕组的电流轮流切换,在供给连续脉冲时,就能一步一步地连续转动,从而使电机旋转。步进电机每转一周的步数相同,在不丢步的情况下运行,其步距误差不会长期积累。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,同时步进电机只有周期性的误差而无累积误差,精度高,步进电动机可以在宽广的频率围通过改变脉冲频率来实现调速、快速起停、正反转控制等,这是步进电动机最突出的优点[1]。 正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。由于步进电动机能直接接收数字量的输入,所以特别适合于微机控制。 2国外的研究概况 步进电机是国外发明的。中国在文化大革命中已经生产和应用,例如、、、、都生产,而且都在各行业使用,驱动电路所有半导体器件都是完全国产化的,当时是全分立元器件构成的逻辑运算电路,还有电容耦合输入的计数器,触发器,环形分配器。国外在大功率的工业设备驱动上,目前基本不使用大扭矩步进电动机,因为从驱动电路的成本,效率,噪音,加速度,绝对速度,系统惯量与最大扭矩比来比较,比较不划算,还是用直流电动机,加电动机编码器整体技术和经济指标高。一些少数高级的应用,就用空心转杯电机,交流电机。国外在小功率的场合,还使用步进电机,例如一些工业器材,工业生产装备,打印机,复印件,速印机,银行自动柜员机。国外用许多现代的手段将步进电机排挤出驱动应用,除了前面提到的旋转编码器,打印机还使用光电编码带或感应编码带配合直流电动机,实现闭环直线位移控制。国过去是用大力矩步进电动机实现机床数控,有实力的公司现在也采用交流电动机驱动数控机床,在驱动设备的主要差距,是国外对交流电动机的控制理论与工程分析和应用能力强,先进的控制理论作为软件,写在控制器部。 总的来说,步进电机是一种简易的开环控制,对运用者的要求低,不适合在大功率的场合使用。 在卫星、雷达等应用场合,中国在文化大革命后期,就生产了力矩电机,就生产了环形
《嵌入式系统设计与实例开发》(2011-2012学年第2学期) 实 验 报 告 实验五电机转动控制实验----c语言实现方法
电机转动控制实验—C语言实现方法 一、实验目的 1.熟悉ARM本身自带的六路即三对PWM,掌握相应寄存器的配置。 2.编程实现ARM系统的PWM输出和I/O输出,前者用于控制直流电机,后者用于控制步进电机。 3.了解直流电机和步进电机的工作原理,学会用软件的方法实现步进电机的脉冲分配,即用软件的方法代替硬件的脉冲分配器。 4.掌握带有PWM和I/O的CPU编程实现其相应功能的主要方法。 二、实验内容 学习步进电机和直流电机的工作原理,了解实现两个电机转动对于系统的软件和硬件要求。学习ARM知识,掌握PWM的生成方法,同时也要掌握I/O的控制方法。 1.编程实现ARM芯片的一对PWM输出用于控制直流电机的转动,通过A/D旋钮控制其正反转及转速。 2.编程实现ARM的四路I/O通道实现环形脉冲分配用于控制步进电机的转动,通过A/D 旋钮转角控制步进电机的转角。 3.通过超级终端来控制直流电机与步进电机的切换。 三、预备知识 1、用ARM SDT 2.5或ADS1.2集成开发环境,编写和调试程序的基本过程。 2、ARM应用程序的框架结构。 3、会使用Source Insight 3 编辑C语言源程序。 4、掌握通过ARM自带的A/D转换器的使用。 5、了解直流电机的基本原理。 6、了解步进电机的基本原理,掌握环形脉冲分配的方法。 四、实验设备及工具 硬件:ARM嵌入式开发平台、用于ARM7TDMI的JTAG仿真器、PC机Pentium100以上。 软件:PC机操作系统win98、Win2000或WinXP、ARM SDT 2.51或ADS1.2集成开发环境、仿真器驱动程序、超级终端通讯程序。 五、实验原理 1.直流电机 1)直流电动机的PWM电路原理 晶体管的导通时间也被称为导通角а,若改变调制晶体管的开与关的时间,也就是说通过改变导通角а的大小,如图2-22所示,来改变加在负载上的平均电压的大小,以实现对电动机的变速控制,称为脉宽调制 (PWM)变速控制。在PWM变速控制中,系统采用直流电源,放大器的频率是固定,变速控制通过调节脉宽来实现。 构成PWM的功率转换电路或者采用"H"桥式驱动,或者采用 "T"式驱动。由于"T"式电路要求双电源供电,而且功率晶体管承受的反向电压为电源电压的两倍。因此只适用于小功率低电压的电动机系统。而"H"桥式驱动电路只需一个电源,功率晶体管的耐压相对要求也低些,所以应用得较广泛,尤其用在耐高压的电动机系统中。
机电工程学院 课程设计说明书设计题目: 三相六拍步进电动机控制程序的设计与调试 学生姓名: *** 专业班级:机制***** 学号:************ 指导教师: *** 2012年12 月08 日
内容摘要 步进电动机具有快速起停、精确步进和定位等特点,所以常用作工业过程控制及仪器仪表的控制元件。目前,比较典型的控制方法是用单片机产生脉冲序列来控制步进电机。但采用单片机控制, 不仅要设计复杂的控制程序和I /O 接口电路, 实现比较麻烦, 而且对工业现场的恶劣环境适应性差, 可靠性不高。 使用PLC可编程控制器实现三相六拍步进电动机驱动,可使步进电动机东芝的抗干扰能力强,可靠性高,同时,由于实现了模块化结构,是系统结构十分灵活,而且编程语言简短易学,便于掌握,可以进行在线修改,柔性好,体积小,维修方便。 本设计是利用PLC做三相六拍步进电动机的控制核心,用按钮开关的通断来实现对步进电机正,反转控制,而且正,反转切换无须经过停车步骤。其次可以通过对按钮的控制来实现对高,低速度的控制。充分发挥PLC的功能,最大限度地满足被控对象的控制要求,是设计PLC控制系统的首要前提,这也是设计最重要的一条原则。本设计更加便于实现对步进电机的制动化控制。 关键词:PLC控制;三相六拍;步进电动机;电机正反转
目录 引言 (1) 第1章步进电动机和PLC简介 (2) 1.1步进电动机 (2) 1.1.1三相六拍步进电动机 (2) 1.2PLC简介 (3) 1.2.1可编程控器概述 (3) 1.2.2 可编程控制器的定义 (3) 1.2.3 PLC的特点 (3) 第2章三相六拍步进电动机控制程序的设计 (5) 2.1控制程序流程图及软件模块 (5) 2.2梯形图程序设计 (7) 2.2.1 CPU的选择 (7) 2.2.2输入输出编址 (7) 2.2.3状态真值表 (7) 2.3梯形图程序 (8) 2.4三相六拍步进电机控制语句表 (12) 2.5程序的运行及调试 (14) 2.6I/O接线图 (16) 结论 (17) 设计总结 (18) 谢辞 .................................................. 错误!未定义书签。参考文献............................................... 错误!未定义书签。
步进电机自动控制系统 设计内容 设计用P C机对四相步进电机,方向,步数及自动化控制系统,并编写汇编程序实现相应轻能。 设计要求 (1)设计控制系统硬件电机。 (2)由8255键盘控制电机的方向,走的步数,并由数码管显示相应的参数。 (3)在命令执行结束后,由PC内部扬声器发出信号提示。 设备与器材 PC机一台,TPC-1实验台一个,并行接口8255一片,步进电机一个,LED数码管4个,74ls164按键11个,GAL芯片一个,74LS245一片。 硬件方案 硬件共分成5个模块:①译码驱动电路,②8255控制键盘模块③8255LED显示模块,④步电机驱动模块,⑤步进电机模块 a) 译码驱动电路 方案一使用适当的门电路来实现不同地址的,用74LS245做数据驱动,缺点: 由于只使用门电路,电路连线非常复杂 方案二使用76LS138和适当门电路实现译码,相对于方案一电路复杂度有一定的改观,在TPC实验箱上使用这种译码方案 方案三使用可编程逻辑器件GAL16V8实现译码功能,用GAL优点:成本低,电路连线少。本设计选择这个方案来实现译码功能。 a)键盘模块 方案一用8255 12个口直接接按键,此方法成本高,不使用行列法,浪费端口,如用行列法只用7个端口。 方案二使用2个74LS273或74LS373控制键盘,其中一个控制行,273反向从键盘中读数据,另一个控制列选,273正向向键盘发数据。 方案三使用7281芯片同时控制键盘和数码,7281通过串行口和总线通信,端口使用少,且操作方便。 方案四PC0~4,PB0~4分别控制16个按键。由于本模块技术已经成熟,在应用中广泛使用,所以本设计选择此方案来实现。 c) LED数码管显示模块 方案一74LS138一片,ULN2803A一片和74HC573一片,来实现显示,74LS138译 码送UNL2083A通过UNL2083A控制位,通过74HC573控制数据,本方案,成本较高,要单片机中有使用比较多。 方案二使用一片8255A控制两个74HC573和一个正相驱动器74LS07和一个反相驱 动器74LS06分别控制4个LED位选和编码数据传输。此方案用到了8255A由于模块②中用到的8255A3个口都以使用,再用一个8255A成本比较高。 方案三通过一个片信号,两个74HC373和一个正相驱动器74LS06和一个反相驱动 器74LS07分别控制3个LED位选和编码数据传输。此方案成本低,但是软件实现的点复杂。 方案四使用4个74HC373和控制4个LED编码数据,用8255A PC高位和总线片选信号控制数据输入位选,由于是静态显示,一般用于1个或2个数码管的显示。 方案五使用4个74LS164,通过串行移位来实现LED显示。成本不高,使用端口少,可以直接通过8255PC7和PB7口,一个做为移位控制,一个送数据。本设计使用此方案 d) 步进电机驱动模块
毕业设计(论文) 学院 专业 姓名
XX大学 毕业设计(论文)任务书
前言 随着现代工业自动化的日益发展,电动机作为重要的电器元件,被广泛的应用在各种自动化控制系统中。步进电动机由于其具有易于电脑操作、步数误差小、精度高、使用系统时间长和成本低等优点,被广泛应用于工业控制中。其中五相混合式步进电机总体性能优于其它种类的步进电动机,是工业上应用最为广泛的步进电动机品种,被广泛的应用在各个领域中。所以对五相步进电动机实现自动化是工业自动化的必然趋势。打印机作为计算机的输出设备之一,运用步进电动机作为打印机的字车动力源和走纸机构,通过牵引机构将步进电动机的转动转变为走纸移动,可以实现打印纸的纵向移动,因其要求精度比较高,所以,打印机的走纸结构能够使用五相步进电动机来控制。对五相步进电动机的使用,工业中应用比较广泛,但大都应用于高精度的机床控制系统中,整个系统比较庞大,所以,本文以步进电动机在的打印机中的精密控制为背景介绍使用PLC控制五相步进电动机按照给定频率自动运行和自由调速的模拟控制方法。
摘要 主要阐述了以五相步进电动机在针式打印机走纸结构中的应用为背景,介绍了一种用三菱FX-2N系列PLC实现对规格型号90BYG550A-0301的五相步进电动机控制的方法,利用PLC产生脉冲信号对五相步进电动机进行模拟控制,实现对五相步进电动机五个绕组的通电状态,达到五相步进电动机按照固定速度的循环自动运行的目的,并实现步进电动机正反转和调速控制。用PLC控制五相步进电动机驱动针式打印机的走纸结构控制纸张的进退,实现打印机的打印工作。基于PLC控制的步进电动机具有设计简单,实现方便,定位精度搞,参数设置灵活等有点,在工业过程控制中使用可靠性高,监控方便。本设计还包括步进电动机的工作原理和特点,PLC的主要功能和应用,各硬件软件元件的介绍选择以及控制程序的编程方法。 关键字:五相步进电动机,PLC控制
实验6:步进电机实验 一、实验目的 了解直流电机和步进电机的工作原理 学会Linux下用软件的方法实现步进电机的脉冲分配,用软件 的方法代替硬件的脉冲分配器 二、实验内容 学习步进电机的工作原理,了解实现电机转动对于系统的软件和硬件要求。学习ARM知识,要掌握I/O的控制方法。Linux下编程实现ARM的四路I/O通道实现环形脉冲分配用于控制步进电机的转动。 三、预备知识 C语言的基础知识、程序调试的基础知识和方法,Linux的基本操作。Linux关于module的必要知识。 四、实验设备及工具 硬件:UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上,硬盘10G以上 软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境 五、实验原理 1、步进电机概述 步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步电动机。单相步进电动机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。多相步进电动机有多相方波脉冲驱动,用途很广。使用多相步进电动机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电动机各相绕组。每输入一个脉冲到脉冲分配器,电动机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受
电压波动和负载变化的影响。由于步进电动机能直接接收数字量的输入,所以特别适合于微机控制。 2、步进电机的种类 目前常用的步进电机有三类: 1、反应式步进电动机(VR)。它的结构简单,生产成本低,步距角可以做的相当小,但动态性能相对较差。 2、永磁式步进电动机(PM)。它的出力大,动态性能好;但步距角一般比较大。 3、混合步进电动机(HB)。它综合了反应式和永磁式两者的优点,步距角小,出力大,动态性能好,是性能较好的一类步进电动机。 3、步进电机的工作原理 现以反应式三相步进电机为例说明其工作原理。定子铁心上有六个形状相同的大齿,相邻两个大齿之间的夹角为60度。每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为一相绕组。各个大齿的内表面上又有若干个均匀分布的小齿。转子是一个圆柱形铁心,外表面上圆周方向均匀的布满了小齿。转子小齿的齿距是和定子相同的。设计时应使转子齿数能被二整除。但某一相绕组通电,而转子可自由旋转时,该相两个大齿下的各个小齿将吸引相近的转子小齿,使电动机转动到转子小齿与该相定子小齿对齐的位置,而其它两相的各个大齿下的小齿必定和转子的小齿分别错开正负1/3的齿距,形成“齿错位”,从而形成电磁引力使电动机连续的转动下去。 和反应式步进电动机不同,永磁式步进电动机的绕组电流要求正,反向流动,故驱动电路一般要做成双极性驱动。混合式步进电动机的绕组电流也要求正,反向流动,故驱动电路通常也要做成双极性。 4、开发板中步进电机控制的实现 本开发板中使用的步进电机为四相步进电机。转子小齿数为64。 系统中采用四路I/O进行并行控制,ARM控制器直接发出多相脉冲信号,在通过功率放大后,进入步进电机的各相绕组。这样就不再需要脉冲分配器。脉冲分配器的功能可以由纯软件的方法实现。
目录 1 概述 (1) 1.1 PLC控制步进电机研究的意义 (1) 2 基于PLC的步进电机控制系统设计 (9) 2.1 系统的组成及功能 (9) 2.2 步进电机特性 (9) 2.3 PLC介绍 (12) 2.4 步进电机控制系统程序设计 (13) 3 磁头定位 (20) 3.1 硬盘工作原理 (20) 3.2 磁头及定位系统 (23) 4 难题及解决过程 (24) 5 结论 (25) 结束语 (28) 致谢 (29) 参考文献 (30) 附录A (31)
1 概述 1.1 PLC控制步进电机研究的意义 基于步进电动机良好的控制和准确定位特性,被广泛应用在精确定位方面,诸如数控机床、绘图机、扎钢机、自动控制计算装置、自动记录仪表等自动控制领域。 PLC作为简单化了的计算机,功能完备、灵活、通用、控制系统简单易懂,价格便宜,可现场修改程序,体积小、硬件维护方便,价格便宜等优点,在全世界广泛应用,为生产生活带来巨大效益方便。因此,通过研究用PLC来控制步进电动机的,既可实现精确定位控制,又能降低控制成本,还有利于维护。以往的步进电动机需要靠驱动器来控制,随着技术的不断发展完善,PLC具有了通过自身输出脉冲直接步进电动机的功能,这样就有利于步进电动机的精确控制。本课题《基于PLC的步进电机磁头定位系统设计》就是利用PLC控制步进电机在硬盘工作时磁头定位的研究。 1.2 国内外关于步进电机和PLC的应用状况 1.2.1 步进电机方面 步进电机是一种将电脉冲转化为角位移的执行元件。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机、交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。控制涉及到机械、电机、电子及计算机等许多专业知识。 目前,国内生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只有一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,选用步进电机时应该十分注意以下一些指标。 (1)步进电机的静态指标术语 相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。 拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,
步进电动机概念及其工作原理 步进电动机是一种将脉冲信号变换成相应的角位移(或线位移)的电磁装置,是一种特殊的电动机。一般电动机都是连续转动的,而步进电动机则有定位和运转两种基本状态,当有脉冲输入肘步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。步进电动机的角位移量和输入脉冲的个数严格成正比,在时间上与输入脉冲同步,因此只要控制输入脉冲的数量、频率及电动机绕组通电的相序,便可获得所需的转角、转速及转动方向。在没有脉冲输入时,在绕组电源的激励下气隙磁场能使转子保持原有位置处于定位状态。步进电动机按其输出转矩的大小来分,可以分为快速步进电动机和功率步进电动机。快速步进电动机连续工作频率高而输出转矩较小,一般在N·cm级,可以作为控制小型精密机床的工作台(例线切割机床)也可以和液压转矩放大器组成电液脉冲马达去驱动数控机床的工作台,而功率步进电动机的输出转矩就比较大是N·m级的,可以直接去驱动机床的移动部件。步进电动机按其励磁相数,可以分为三相、四相、五相、六相甚至八相。一般来说随着相数的增加,在相同频率的情况下,每相导通电流的时间增加,各相平均电流会高些,仍而使电动机的转速—转矩特性会好些,步距角亦小。但是随着相数的增加,电动机的尺寸就增加,结构亦复杂,目前多用3~6相的步进电动机。由于步进电动机的转速随着输入脉冲频率变化而变化,调速范围很广,灵敏度高,输出转角能够控制,而且输出精度较高,又能实现同步控制,所以广泛地使用在开环系统中,也还可用在一般通用机床上,提高进给机构的自动化水平。步进电动机按其工作原理来分,主要
有磁电式和反应式两大类,这里只介绍常用的反应式步进电动机的工作原理,现用下图的步进电动机的简化图来加以说明。 在电动机定子上有A、B、C三对磁极,磁极上绕有线圈,分别称之为A相、B 相和C相,而转子则是一个带齿的铁心,这种步进电动机称之为三相步进电动机。如果在线圈中通以直流电,就会产生磁场,当A、B、C三个磁极的线圈依次轮流通电,则A、B、C三对磁极就依次轮流产生磁场吸引转子转动。首先有一相线圈(设为A相)通电,则转子1、3两齿被磁极A吸住,转子就停留在图5—5a的位置上。然后,A相断电,6相通电,则磁极A的磁场消失磁极B产生了磁场,磁极召的磁场把离它最近的2、4两齿吸引过去,停止在图b的位置上,这时转子逆时针转了30°。再接下去B相断电,C相通电。根据同样道理,转子又逆时针转了30°,停止在图c的位置上。若再A相通电,C相断开,那么转子再逆转30°,使磁极A的磁场把2、4两个齿吸住。定子各相轮流通电一次转子转过一个齿。这样按A→B→C→A→B→C→A→…次序轮流通电,步进电动机就一步一步地按逆时针方向旋转。通电线圈每转换一次,步进电动机旋转30°,我们把步进电动机每步转过的角度称之为步距角。如果把步进电动机通电线圈转换的次序倒过来换成A→C→B→A→C→B→…的顺序,则步进电动机将按顺时针方向旋转,所以要改变步进电动机的旋转方向可以在仸何一相通电时进行。 步进电动机
实验一步进电机基本原理实验 一、实验目的 1、了解步进电动机的基本结构和工作原理。 2、掌握步进电机驱动程序的设计方法。 二、实验原理 步进电动机又称为脉冲电机,是工业过程控制和仪表中一种能够快速启动、反转和 制动的执行元件。其功能是将电脉冲转换为相应的角位移或直线位移。步进电动机的运 转是由电脉冲信号控制的,步进电动机的角位移量或线位移量与脉冲数成正比,每给一 个脉冲,步进电机就转动一个角度(步距角)或前进/倒退一步。步进电机旋转的角度由 输入的电脉冲数确定,所以,也有人称步进电动机为一个数字/角度转换器。 当某一相绕阻通电时,对应的磁极产生磁场,并与转子形成磁路,这时,如果定子 和转子的小齿没有对齐,在磁场的作用下,由于磁通具有力图走磁阻最小路径的特点, 转子将转动一定的角度,使转子与定子的齿相互对齐,由此可见,错齿是促使电机旋转 的原因。 四相步进电动机以四相单四拍、四相双四拍、四相八拍方式工作时的脉冲分配表如 表1,表2和表3 表1 四相单四拍脉冲分配表表2 四相双四拍脉冲分配表 表3 四相八拍脉冲分配表 如步进电动机每一相均停止通电,则电机处于自由状态;若某一相一直通直流电时,
则电机可以保持在固定的位置上,即停在最后一个脉冲控制的角位移的终点位置上,这样,步进电动机可以实现停车时转子定位。这就是步进电动机的自锁功能。当步进电机处于自锁时,若用手旋转它,感觉很难转动。 三、实验步骤: 1.将DRYDC-A型运动控制台的电源线和串行通信接口线连接好。 2.打开DRMU-ME-B综合实验台的电源总开关,开关电源的开关,采集仪开关。 启动硬件设备。 3.打开计算机,从桌面或程序组运行DRLink主程序,然后点击DRLink快捷 工具条上的“联机注册”图标,选择“DRLink采集主卡检测”进行注册。 没有使用信号采集主卡的用户可选择:“局域网服务器”进行注册,此时,必需在对话框中填入DRLink服务器的主机IP地址。 4.点击DRLink快捷工具条上“文件夹”图标,出现文件选择对话框,在实验 目录中选择“步进电机基本原理”实验,并启动该实验。 5.点击该实验脚本中的“开关”按钮,向运动控制卡下载实验程序。 6.本实验中先做步进电机的驱动实验:选择运行方式为“连续驱动”,依次选 择步进电机的工作方式为:四相单四拍、四相双四拍、四相八拍;方向可以是任意的;脉冲间隔参数可用5~10ms。点“电机驱动”按钮,驱动电机工作。观察电机的工作情况。(对于四相八拍的工作方式,脉冲间隔最小可以到2ms)终止电机运行请在运行方式中选择“停止保持”或“停止不保持”。 7.步进电机的自锁实验:运行方式选择“停止保持”,其它参数不变,点“电 机驱动”按钮。可以使步进电机某相通电,处于“自锁”状态。此时,用手转动电机的皮带轮,可以感到转动比较困难。 8.步进电机的步距角演示:运行方式选择“单步驱动”,点“电机驱动”按钮。 每点击一次“电机驱动”按钮,步进电机旋转一个角度,这个角度就是步距角。对于本实验台步距角为1.8o。 除了可以使用DRLink平台下的实验脚本进行本实验外,还可以使用C-51的C语言程序进行本实验。本运动控制平台在内部使用了DRMC-A型运动控制卡,其CPU是ADUC842,关于ADUC842的硬件的详细信息,请参考我们提供的pdf 文档。在DRMC-A型运动控制台,步进电机的端口地址:0x8000,用低4位表示电机的4相,1表示发送脉冲,0表示空。根据步进电机的工作方式的脉冲分配表(表1~3),逐步向端口的低4位写入0和1就可以了。具体的程序请参考StepMotor1.c~StepMotor5.c。在生成执行代码后,按运动控制台的“PRG”+“RST”按钮后,使用Windows Serial Downloader将执行程序下载到单片机内。
方向信号 (a) 脉冲+方向 (b) 正脉冲+负脉冲 实验五 步进电机单轴定位控制实验 一、实验目的 1. 学习和掌握步进电机及其驱动器的操作和使用方法; 2. 学习和掌握步进电机单轴定位控制方法; 3.学习和掌握PLC 单轴定位模块的基本使用方法。 二、实验原理 步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移量的机电执行元件,即步进电动机输入的是电脉冲信号,输出的是角位移或直线位置。每给一个脉冲,步进电动机转动一个角度,这个角度称为步距角。运动速度正比于脉冲频率,角位移正比于脉冲个数。 步进电动机典型控制系统框图如图1-2-9所示。 图1-2-9 步进电动机典型控制系统框图 位置控制单元可根据需要的频率和个数以及设定的加减时间控制步进电动机运动。 由于步进电动机需要正反转运动,因此定位单元的输出脉冲形式有“脉冲+方向”和“正脉冲+负脉冲”两种,它们均可控制步进电动机正反转运动。输出脉冲形式通过参数设定来选择。其脉冲形式如图1-2-10所示。 图1-2-10 定位模块的两种输出脉冲形式
PLS ) 由于步进电动机的电磁惯性和所驱动负载的机械惯性,速度不能突变,因此定位模块要控制升降频过程。步进电机升、降频过程如图1-2-11。一般情况下,S 2=S 3。 图 1-2-11 步进电机升、降频示意图 其中:f 1——设定的运行频率,应小于步进电动机的最高频率; S 1——设定的总脉冲个数; S 2——升频过程中脉冲个数,由加速时间和运行频率确定; S 3——降频过程中脉冲个数,由减速时间和运行频率确定。 步进电动机驱动器将位置定位模块的输出脉冲信号进行分配并放大后驱动步进电动机的各相绕组,依次通电而旋转。驱动器也可接受两种不同形式的脉冲信号,通过开关来选择,定位模块和驱动器的脉冲形式要相同。另外,为了提高步进电动机的低频性能,驱动器一般具有细分功能,多个脉冲步进电动机转动一步,细分系数一般为1、2、4、8、16、32等几种,通过拨码开关来设定。 步进电动机驱动生产机械的运动部件。 图1-2-12 实验系统结构框图 位置定位模块、步进电动机及驱动器种类很多,本实验中采用的是三菱FX2N 系列PLC 中的双轴定位模块FX2N-20GM ,该模块与PLC 相连,可以单独或同时控制两个步进电动机,
步进电机闭环控制系统
几种典型的步进电机闭环控制系统 哈尔滨工业大学 【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。【叙词】步进电机闭环系统/高精度定位 l概述 步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。 2步进电动机闭环系统与开环系统比较[1- 步进电机的主要优点之一是适于开环控制。在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。
c.闭环控制下,效率一转矩曲线提高。 d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。 e.利用闭环控制,步进电动机可自动地、有效地被加速和减速。 f.闭环控制相对开环控制在快速性方面提高的定量评价,可借助比较Ⅳ步内通过某个路径间隔的时间得出: 式中n-步进电动机转换拍数(N>n) g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。 闭环驱动的步进电机的性能在所有方面均优于开环驱动的步进电动机。步进电机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控制系统中,闭环控制的步进电动机将获得广泛应用。3编码器形式的步进电动机阕环控制系统步进电机的闭环控制最早是采用编码器的形式,图1是其原理示意图。初始状态,系统受一相或几相激磁而静止。开始工作后,先把目标位置送入减法计数器;然后,“起动”脉冲信号加到
基于51系列单片机控制步进电机调速实验 实验指导书 仇国庆编写 重庆邮电大学自动化学院 自动化专业实验中心 2009年2月
基于51系列单片机控制步进电机调速实验 实验目的及要求: 1、熟悉步进电机的工作原理 2、熟悉51系列单片机的工作原理及调试方法 3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量) 4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。速度设定由键盘设定,步进电机的反馈速度由LED 数码管显示。 实验原理: 步进电机控制原理 一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。由于输入的是脉冲信号,输出的角位移是断续的,所 以又称为脉冲电动机。随着数字控制系统的发展,步进电动机的应用将 逐渐扩大。 步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来 进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由 脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号 可以由单片机产生。 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几 何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻 两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐, B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)
实验六五相步进电动机控制的模拟 在五相步进电机的模拟控制实验区完成本实验。 一、实验目的 了解并掌握移位指令在控制中的应用及其编程方法。 二、控制要求 要求对五相步进电动机五个绕组依次自动实现如下方式的循环通电控制: 第一步:A~B~C~D~E 第二步:A~AB~BC~CD~DE~EA 第三步:AB~ABC~BC~BCD~CD~CDE~DE~DEA 第四步:EA~ABC~BCD~CDE~DEA 三、五相步进电动机的模拟控制的实验面板图: 上图中,下框中的A、B、C、D、E分别接主机的输出点Y1、Y2、Y3、Y4、Y5;SD接主 机的输入点X0。上框中发光二极管的点亮与熄灭用以模拟步进电机五个绕组的导电状态。四、编制梯形图并写出程序,实验梯形图参考图6 实验参考程序 步序指令器件号说明步序指令器件号说明 0 LD X000 输入 3 K20 1 ANI M0 4 LD T0 2 OUT T0 延时2秒 5 OUT M0 步序指令器件号说明步序指令器件号说明 6 LD X000 34 OR M106 7 OUT T2 延时3秒35 OR M107 8 K30 36 OR M111 9 ANI T2 37 OR M112 10 OUT M10 38 OR M113 11 LD M10 39 OR M204 12 OR M2 40 OR M205 13 OUT M100 41 OR M206 14 LD M115 42 OR M209
15 OUT M200 43 OUT Y001 A相电机运转 16 LD M209 44 LD M102 17 OUT T1 延时2秒45 OR M107 18 K20 46 OR M108 19 ANI T1 47 OR M112 20 OUT M2 48 OR M113 21 LD M0 移位输入49 OR M114 22 FNC 35 左移位50 OR M115 23 M100 数据输入51 OR M206 24 M101 移位52 OR M207 25 K15 移位段数:15 53 OUT Y002 B相电机运转 26 K1 1位移位54 LD M103 27 LD M0 移位输入55 OR M108 28 FNC 35 左移位56 OR M109 29 M200 数据输入57 OR M113 30 M201 移位58 OR M114 31 K9 移位段数:9 59 OR M115 32 K1 1位移位60 OR M201 33 LD M101 61 OR M202 步序指令器件号说明步序指令器件号说明 62 OR M206 76 OR M209 63 OR M207 77 OUT Y004 D相电机运转 64 OR M208 78 LD M05 65 OUT Y003 C相电机运转79 OR M110 66 LD M104 80 OR M111 67 OR M109 81 OR M202 68 OR M110 82 OR M203 69 OR M115 83 OR M204 70 OR M201 84 OR M205 71 OR M202 85 OR M208 72 OR M203 86 OR M209 73 OR M204 87 OUT Y005 E相电机运转 74 OR M207 88 END 程序结束 75 OR M208 五、练习题: 1、试编制三相步进电机单三拍反转的PLC控制程序。 2、试编制三相步进电机三相六拍正转的PLC控制程序。 3、试编制三相步进电机双三相正转的PLC控制程序。 4、试编制五相十拍运行方式的PLC控制程序。
文献综述 电气工程及其自动化 步进电动机的微机控制 前言:进电动机属于DC驱动的同步电动机,它是纯粹的数字控制电动机。它是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。近30年来,数字技术、计算机技术和永磁材料的迅速发展推动了步进电动机的发展,为步进电动机的应用开辟了广阔的前景。 步进电动机系统是由步进电动机及其驱动控制电路构成的。近二十年来,电力电子技术、微电子技术和微处理器技术的飞速发展,极大地推动了步进电动机驱动控制技术的进步,并使之在不断完善中趋于成熟。步进电动机驱动控制技术的发展,在使得步进电动机系统获得更加广泛应用的同时,也使得步进电动机与其驱动电路装置日益成为不可分割的一个整体。步进电动机驱动电路的合理设计与改进,需要对步进电动机运行机理和具体结构设计的透彻了解与深入分析。同时,步进电动机系统的性能和运行品质在很大程度上取决于其驱动电路的结构与性能,同一台电动机配以不同类型的驱动电路,其性能会有较大差异。抛开驱动电路来谈步进电动机的性能是不完全的。 步进电动机主要用于数字控制系统中,精度高,运行可靠。如采用位置检测和速度反馈,亦可实现闭环控制。步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表、和磁盘等等之中,另外在工业自动化生产线、印刷设备如打印机、绘图机等中亦有应用。 正文:国内外关于步进电动机的研究主要在它本身的性能提高,应用领域的不断拓广,电动机外形的改变和不同的更先进的控制方式。 1、步进电动机的发展历史与概要。 步进电动机的发展过程 步进电动机的机理是基于最基本的电磁铁作用、其原始模型起源于1830年至1860年间。1870午前后开始以控制为目的的尝试、应用于氮弧灯的电极输送机构中。这被认为是最初的步进电动机。 此后,在电话自动交换机中广泛使用了步进电动机。不久又在缺乏交流电源的船舶和飞
<<技能大赛自动线的安装与调试>>项目二等奖 心得二 心得二:步进电机的控制方法 我带队参加《2008年全国职业院校技能大赛自动线的安装与调试》项目,我院选手和其他院校的三位选手组成了天津代表队,我院选手所在队获得了《2008年全国职业院校技能大赛自动线的安装与调试》项目二等奖,为天津市代表队争得了荣誉,也为我院争得了荣誉。以下是我这个作为教练参加大赛的心得二:步进电机的控制方法 《2008年全国职业院校技能大赛自动线的安装与调试》项目的主要内容包括如气动控制技术、机械技术(机械传动、机械连接等)、传感器应用技术、PLC控制和组网、步进电机位置控制和变频器技术等。但其中最为重要的就是PLC方面的知识,而PLC中最重要就是组网和步进电机的位置控制。 一、 S7-200 PLC 的脉冲输出功能 1、概述 S7-200 有两个置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。 当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电 机的速度和位置的开环控制。置PTO 功能提供了脉冲串输出,脉冲周期和数量可由用户控制。但应用程序必须通过PLC内置I/O 提供方向和限位控制。 为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO 或位控模块的组态。向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。 2、开环位控用于步进电机或伺服电机的基本信息 借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下: ⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED) 图1是这2 个概念的示意图。 MAX_SPEED 是允许的操作速度的最大值,它应在电机力矩能力的范围。驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。
单片机原理与应用课程设计说明书 题目:步进电动机控制系统设计 系部: 专业: 班级:2013级1班 学生姓名: 学号: 指导教师: 2013年 6 月22 日
目录 1.项目设计任务与要求 (1) 2.项目设计方案 (1) 2.1设计思路 (1) 2.2器件选择方案 (1) 2.2.1 单片机的选择 (1) 2.2.2 AT80C51的主要性能 (1) 2.2.3 AT80C51引脚图 (2) 2.2.4 管脚作用: (2) 2.2.5 四相步进电动机工作原理 (3) 3 .硬件电路设计 (5) 3.1步进电动机介绍 (5) 3.2 步进电动机控制系统电路设计 (5) 3.3步进电动机驱动电路 (5) 3.4按键与指示电路 (6) 3.5晶振电路和复位电路 (8) 4.项目软件设计 (9) 5.项目仿真与调试 (12) 5.1程序的调试 (12) 5.2步进电动机控制系统仿真 (13) 5.2.1步进电动机正转仿真 (13) 5.2.2步进电动机反转仿真 (14) 5.2.3步进电动机停止仿真 (14) 6.结论 (15) 7.附录 (16) 参考文献 (18)
1.项目设计任务与要求 使用80C51单片机对四相步进电动机进行控制,使其能够顺时针或逆时针旋转。 1)电动机运行平稳,正反转控制自如; 2)根据要求改变运行圈数和运行速度; 3)写出详细的电路工作原理、参数计算; 4)画出仿真电路图; 5)仿真测试并记录结果。 2.项目设计方案 2.1设计思路 步进电动机驱动原理如下:单片机发出脉冲信号,控制步进电动机定子的各相绕组以适当的时序通、断电,使其作步进式旋转。四相步进电动机各相绕组的通电顺勋可以单四拍(A→B→C→D)、双四拍(AB→BC→CD→DA)和单双八拍(A→AB→B→BC →C→CD→D→DA)的方式进行。按上述顺序切换,步进电动机转子按顺时针方向旋转。若通电顺序相反,则电动机转子按逆时针方向旋转。 2.2器件选择方案 2.2.1 单片机的选择 本设计采用AT80C51单片机,80C51单片机算术运算功能强,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制,并且其功耗低、体积小、价格便宜、耗电低、技术成熟和成本低等优点。许多功能部件集成在芯片内部,其信号通道受外接影响小,可靠性高,控制能力强,运行速度快等特点。 2.2.2 AT80C51的主要性能 1.与STC89C52 单片机产品系列兼容; 2.片内有4KB可在线重复编程的快闪擦写存储器; 3.存储数据保存时间为10年; 4.宽工作电压范围:VCC可为2.7V到6V; 5.全静态工作:可从0Hz至16MHz ; 6.程序存储器具有3级加密保护; 7.128*8位内部RAM; 8.32条可编程I/O线; 9.两个16位定时器/计数器; 10.中断结构具有5个中断源和2个优先级; 11.可编程全双工串行通道;