同步电机数学模型的建立和仿真 :包邻淋 专业:控制工程 学号:1402094
摘要 (3) 1同步电机数学模型的建立 (4) 1.1模型的导出思路 (4) 1.2变量置换用的表达式 (5) 1.4电机实用模型 (6) 1.5电机实用模型的状态空间表达式 (8) 1.6电机模型参数的确定 (10) 2 同步电机数学模型的仿真 (13) 2.1同步发电机仿真模型 (13) 2.2不同阶次模型的仿真分析 (14) 参考文献 (17)
摘要 一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。 常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。同步发电机电路方程又分为基本方程和导出模型两类[4]。对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。如果转子绕组数减少,则发电机方程组的阶数也相应减少。 本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
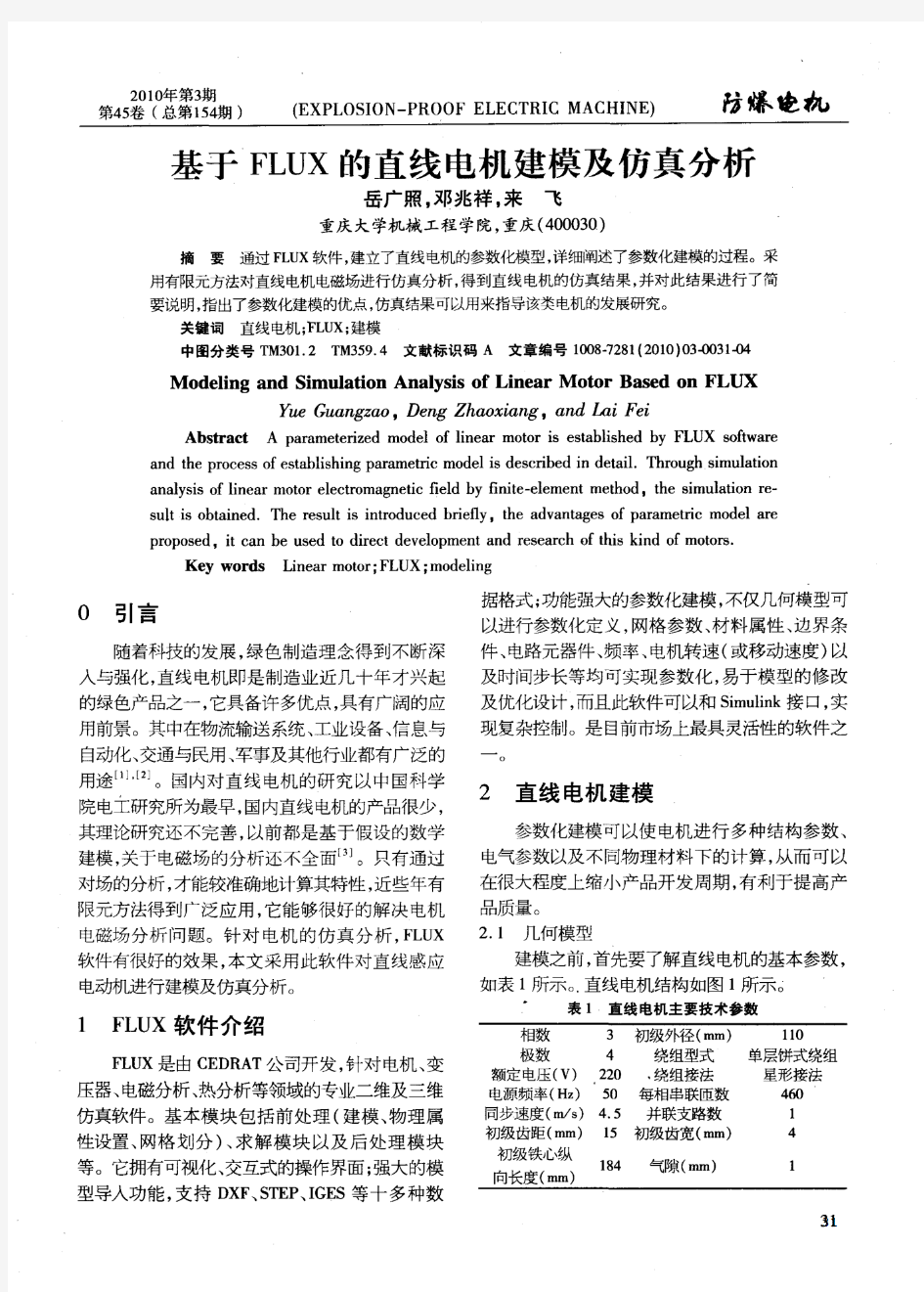
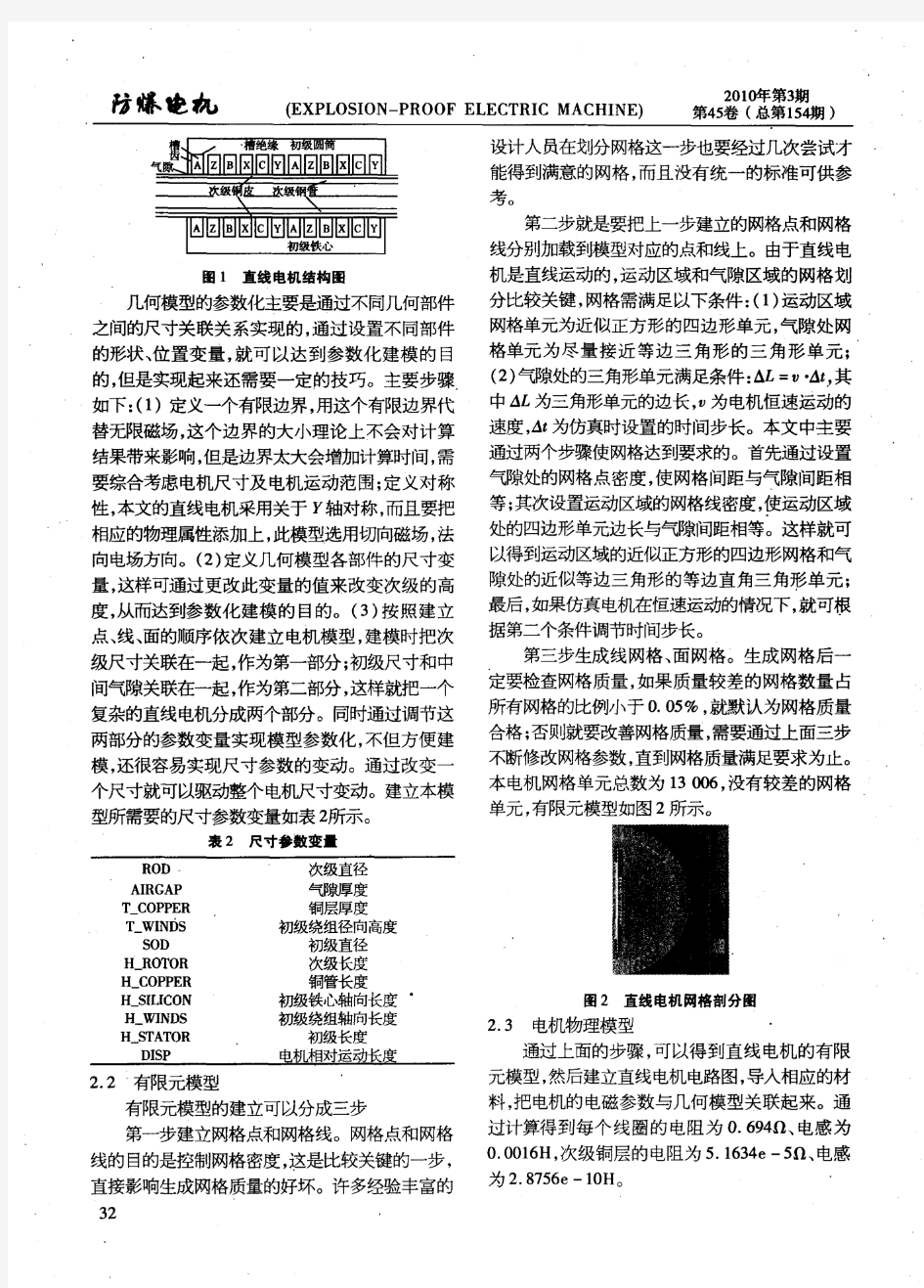
1同步电机数学模型的建立 1.1模型的导出思路 由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。 基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。。在化为实用模型时 和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而 则用实用变量代替。 经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
小型载货电梯直线电机设计 黑龙江省松花江林业管理局锅炉压力容器检验所刘琪芸摘要:为满足人们生活、生产需要,电梯已成为多层建筑中不可缺少的运输工具。本文所研究的直线电机适用于小型载货电梯,在节省空间和控制噪音方面有很大的优势。 关键词载货电梯直线电机 1.直线电机的发展 直线电机也称线性电机,相比于曳引与强制驱动电梯先将电能转回为转动的机械能后利用曳引轮和曳引绳或卷筒与钢丝绳产生的摩擦力驱动电梯,直线电机驱动电梯利用直线电机可以直接将电能转化为直线运动的机械能,无需中间转换机构的传动装置。这样既可以减少如异物掉入曳引轮引发跳绳,曳引绳老化等风险,还省去机房,对重所占用的空间。而且由于传统电梯运动方向受钢丝绳控制只能沿垂直方向运动,直线电机驱动电梯更有噪声小,可水平运动灵活选择层站,同一井道可存在多部电梯等优势。 早在十九世纪至二十世纪初期,直线电机就经历了一个从想法到实验再到实验性应用的坎坷历程。一些发达国家研究人员在实验的基础上,试图将直线电机应用于导弹发射装置,电磁运动装置等。但由于当时社会生产水平牵制,直线电动机电气控制系统成本高;相对于传统旋转电机,直线电机电磁缝隙与极距比值过大导致激磁电流较大,由于铁芯两端断开,存在其特有结构导致的边缘效应。这些弊端都一度使人们对直线电机的发展应用失去信心。 二十世纪中期以来,随着控制技术提高,直线电机又被应用于如磁头定位驱动装置、空气压缩机、传送装置等。后期各国有出现了许多直线电机产品,如吊车、传送车、电动门、窗帘机、车辆运输系统等。同时线性电机不断发展,广泛应用于扫描式记录设备,自动绘图设备等新的领域。 近年来,微型直线电机,利用当代微型计算机和自动控制体系控制微型直线电机,具有反应灵敏、体积小、结构简单等特点。在直线电机基础上研制的超导直线电机,微步距直线电机,直线当量电机等。更有日本研制的压电驱动式直线电机及超声波直线电机等先进水平直线电机相继问世。 我国自二十世纪七十年代开始在直线电机应用也取得了可喜的成绩,例如直线电机冲床、窗帘机,直线电机驱动的自动门,西南交大的磁悬浮列车;但和国外相比应用推广还存在很大差距,例如德国研制的超导吸浮型磁悬浮列车和日本研制的超导斥浮型磁悬浮列车。 2 直线电机的结构与性能 直线电机是将传统的旋转型电机定转子沿轴向剖开拉直,就形成了平板式直线电机结构,再将初级次级卷绕在一根与磁场运动方向平行的轴上,结构演变过程如下图1所示: 图1 2.1直线电机的基础分类
直线电机的应用 直线电机凭借高速度、高加速、高精度及行程不受限制等特性在物流系统、工业加工与装配、信息及自动化系统、交通与民用以及军事等领域发挥着十分重要的作用。 直线电机主要应用场合:一是应用于自动控制系统,这类应用场合比较多;其次是作为长期连续运行的驱动电机;三是应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 直线电机可以在几秒钟内把一架几千公斤重的直升飞机拉到每 小时几百公里的速度,它在真空中运行时,其时速可达几千上万公里。在军事上,人们利用它制成各种电磁炮,并试图将它用于导弹、火箭的发射;在工业领域,直线电机被用于生产输送线,以及各种横向或垂直运动的一些机械设备中;直线电机除具有高速、大推力的特点以外还具有低速、精细的另一特点,例如,步进直线电机,它可以做到步距为1μm的精度,因此,直线电机又被应用到许多精密的仪器设备中,例如计算机的磁头驱动装置、照相机的快门、自动绘图仪、医疗仪器、航天航空仪器、各种自动化仪器设备等。除此之外,直线电机还被用于各种各样的民用装置中,如电动门、电动窗、电动桌、椅的移动,门锁、电动窗帘的开、闭等等,尤其在交通运输业中,人们利用直线电机制成了时速达500km以上的磁浮列车。
直线电机可以认为是旋转电机在结构方面的一种变形,它可以看作是一台旋转电机沿其径向剖开,然后拉平演变而成。近年来,随着自动控制技术和微型计算机的高速发展,对各类自动控制系统的定位精度提出了更高的要求,在这种情况下,传统的旋转电机再加上一套变换机构组成的直线运动驱动装置,已经远不能满足现代控制系统的要求,为此,近年来世界许多国家都在研究、发展和应用直线电机,使得直线电机技术发展速度加快,应用领域越来越广。 直线电机的优点是:结构简单、反应速度快、灵敏度高、随动性好、密封性好、不怕污染、适应性强(由于直线电机本身结构简单,又可做到无接触运行,因此容易密封,各部件用尼龙浸渍后,采用环氧树脂加以涂封,这样它就不怕风吹雨打,或有毒气体和化学药品的侵蚀,在核辐射和液体物质中也能应用)、工作稳定可靠、寿命长(直线电机是一种直接传动的特种电机,可实现无接触传递,故障少,几乎不需要维修,又不怕振动和冲击)、额定值高(直线电机冷却条件好,特别是长次级接近常温状态,因此线负荷和电流密度可以取得很高)、有精密定位和自锁的能力(和控制系统相配合,可做到0.001mm的位移精度和自锁能力)。 直线电机能直接产生直线运动,这一点对直线运动机械设计者和使用者有很大的吸引力。不少直线运动的机械是由旋转电机传动的,必须配置由旋转运动变为直线运动的机械传动装置,使得整个装置机构庞大,成本较高和效率较低。采用直线感应电机,不但省去了机械
Infolytica软件与同类软件的区别 Infolytica与Ansys、Ansoft、Flux软件对比如下:
●这里主要介绍下Infolytica与Ansoft、Flux对比中的优势: ?建模方面:Infolytica应用于任何二维、三维结构建模,可导入、导出其他格 式,如SA T、Pro/E、Catia、STEP、IGES、Investor等,模型识别能力较强。 Ansoft Maxwell、Flux模型识别能力方面不好,导出的cad模型dxf图纸不能直接标注。 ?剖分功能:Infolytica具有网格自适应剖分功能和求解阶次自适应功能,具备 市场唯一的二维1~4阶和三维1~3阶求解能力,可以在保证精度的情况下,快速求解2D/3D问题。而Ansoft网格剖分技术只适合于低端或二维领域,也只有在二维领域才能跟Infolytica相提并论,在处理三维大型复杂问题时则明显不足。 ?3D电磁分析中:速度和精度上Infolytica软件高于Ansoft和Flux软件。 ?二次开发方面:Infolytica具有丰富的脚本和操作过程详细而简洁的函数记 录,非常方便使用者二次开发。而Ansoft、Flux 操作记录非常复杂, 给二次开发带来困难。Ansoft通过宏来实现,对用户的编程能力要求太高。 ?不同之处:Infolytica具有市场上唯一支持六自由度和多运动部件瞬态运动求 解器,而Ansoft、Flux不具备这两种功能。 ?多参数和多目标优化:Infolytica强大的参数化功能,结合优化模块OptiNet 可以进行多参数和多目标的优化,Flux这个功能较好,Ansoft有这个功能,但没有温度功能,更不能对磁热耦合结果进行优化。 ?全球5大领先优势:磁场MagNet和电场ElecNet的耦合,应用粒子加速、 CRT电子轨迹和电弧研究;磁场MagNet和温度场ThermNet双向耦合分析; 电场ElecNet和温度场ThermNet双向耦合分析;优化模块OptiNet可以优化磁场MagNet 和温度场ThermNet耦合结果、电场ElecNet和温度场ThermNet 耦合结果;电磁场的六自由度、多运动体的独家分析能力。
直线电机基础 编辑本段直线电机也称线性电机,线性马达,直线马达 在实际工业应用中的稳定增长,证明直线电机可以放心的使用。下面简单介绍直线电机类型和他们与旋转电机的不同. 最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换相.图示直线电机用HALL换相的相序和相电流. 该图直线电机明确显示动子(forcer, rotor)的内部绕组.磁鉄和磁轨.动子是用环氧材料把线圈压成的。而且,磁轨是把磁铁固定在钢上。 直线电机在过去的10年,经实践上引人注目的增长和工业应用的显著受益才真正成熟。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer, rotor) 是用环氧材料把线圈压缩在一起制成的.而且,磁轨是把磁铁(通常是高能量的稀土磁铁)固定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度)和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙(air gap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 直线电机的控制和旋转电机一样。象无刷旋转电机,动子和定子无机械连接(无刷),不象旋转电机的方面,动子旋转和定子位置保持固定,直线电机系统可以是磁轨动或推力线圈动(大部分定位系统应用是磁轨固定,推力线圈动)。用推力线圈运动的电机,推力线圈的重量和负载比很小。然而,需要高柔性线缆及其管理系统。用磁轨运动的电机,不仅要承受负载,还要承受磁轨质量,但无需线缆管理系统。 相似的机电原理用在直线和旋转电机上。相同的电磁力在旋转电机上产生力矩在直线电机产生直线推力作用。因此,直线电机使用和旋转电机相同的控制和可编程配置。直线电机的形状可以是平板式和U 型槽式,和管式.哪种构造最适合要看实际应用的规格要求和工作环境。 编辑本段圆柱形动磁体直线电机 圆柱形动磁体直线电机动子是圆柱形结构。沿固定着磁场的圆柱体运动。这种电机是最初发现的商业应用但是不能使用于要求节省空间的平板式和U 型槽式直线电机的场合。圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以增加行程。典型的线圈绕组是三相组成
重庆大学 学生实验报告 实验课程名称物流系统建模与仿真 开课实验室物流工程实验室 学院自动化年级12 专业班物流工程2班学生姓名段竞男学号20124912 开课时间2014 至2015 学年第二学期 自动化学院制
《物流系统建模与仿真》实验报告
(2)属性窗口(Properties Window) 右键单击对象,在弹出菜单中选择 Properties;用于编辑和查看所有对象都拥有的一般性信息。 (3)模型树视图(Model Tree View) 模型中的所有对象都在层级式树结构中列出;包含对象的底层数据结构;所有的信息都包含在此树结构中。 4)重置运行 (1)重置模型并运行 (2)控制仿真速度(不会影响仿真结果) (3)设置仿真结束时间 5)观察结果 (1)使用“Statistics”(统计)菜单中的Reports and Statistics(报告和统计)生成所需的 各项数据统计报告。 (2)其他报告功能包括:对象属性窗口的统计项;记录器对象;可视化工具对象;通过触发器 记录数据到全局表。
五、实验过程原始记录(数据、图表、计算等) 1、运行结果的平面视图: 2、运行结果的立体视图 3、运行结果的暂存区数据分析结果图:
第一个暂存区 第二个暂存区 由报表分析可知5次实验中,第一个暂存区的平均等待时间为11.46,而第二个暂存区的平均等待时间为13.02,略大于第一个暂存区,由此可见,第二个暂存区的工作效率基本上由第一个暂存区决定。 4、运行结果三个检测台的数据分析结果图,三个检测台的state饼图: (1)处理器一:
第44卷 2011年 第4期 4月 M ICR OM OTOR S V ol 44.N o 4 A pr 2011 收稿日期:2010-04-07 基金项目:西北工业大学研究生创业种子基金项目 作者简介:李延升(1983),男,博士研究生,研究方向为电机与电器。E-m a i:l liyanchao mm@yahoo .co https://www.doczj.com/doc/5f11016700.html, 窦满峰(1967),男,教授,博导,研究方向为电机与电器。 对转式永磁无刷直流电机的建模与仿真 李延升,窦满峰,雷金莉 (西北工业大学,西安 710072) 摘 要:该文根据对转式与普通永磁无刷直流电机区别,建立了对转永磁无刷直流电机的数学模型,采用M atlab /S i m u li nk 仿真软件建立了电机的仿真模型,并对电机带螺旋桨负载进行仿真分析。仿真结果表明:仿真波形与理论分析基本一致,验证该模型的有效性,为对转式永磁无刷直流电机的控制算法研究提供了工具。关键词:对转式;无刷直流电机;建模;仿真 中图分类号:TM 36+1 文献标志码:A 文章编号:1001-6848(2011)04-0019-04 M odeli ng and Si m ul ati on of the Contra -rotati ng BLDC M otor Control Syste m LI Yansheng ,DOU M anfeng ,LE I Jinli (N ort h w estern P oly technical University ,X i an 710072,China ) Abst ract :Contra -rotati n g per m anentm agnet br ush less DC m otor uses per m anentm agnet as the ou ter rotor , the ar m ature w inding as the i n ner rotor ,both inner and outer rotor i n teracts on the reverse ro tation by m eans of t h e m agne tic force .Based on the ana l y sis of the m athe m atica lm odel o f contra -rotating BLCDM,the mode l of BLDC M w as estab lished by the m odu lar design in M atlab /S i m ulink ,and the si m ulati o n experi m ent w as acco m p li s hed w ith a pr ope ller loads .The si m ulati o n resu lts are consistentw ith t h e theory analysis ,and the m ethod is va li d .The para m eter of th ism ethod is suitable for verif y ing the reasonability o f other contr o l algo -rit h m s and provides a ne w w ay fo r further research o f the con tra -rotati n g BLDC M.K ey w ords :contra -rotati n g ;BLCDM;m odeli n g ;si m u lati o n 0 引 言 对转式无刷直流电机直接驱动对转螺旋桨,在水下航行器中广泛应用 [1] 。它与普通永磁无刷直流 电机比较,除永磁体部分可以旋转,电枢部分也相对静止部分旋转,即电磁转矩驱动两个转子朝相反的方向旋转。以电枢部分为参照系来观察永磁体部分的旋转行为,可以发现对转式永磁无刷直流电机与普通的永磁无刷直流电动机的电流方程、电压平衡方程一致,数学模型中仅仅多了一个运动方程 [2] 。 根据这一思路,本文根据对转永磁无刷直流电机的数学模型,在S i m u li n k 软件中建立仿真模型,并对其进行仿真分析。 1 对转式BLDC M 数学模型 无刷直流电机的基本物理量有电磁转矩、电枢电流、反电动势和转速等 [3] ,这些物理量的计算与 电机的气隙磁场分布、绕组形式有十分密切的关系。 对于稀土永磁无刷直流电动机,其气隙磁场波形可以为方波也可以为正弦波或梯形波,这与选用电机的磁路结构和永磁体的形状有关。本文研究的对转式永磁无刷直流电机,其气隙磁场波形为方波,绕组中感应电动势为梯形波,采用方波电流驱动。在分析和仿真控制系统时,可直接利用电机原有的相变量来建立数学模型,既方便,又能获得准确结果。 假定永磁无刷直流电机工作在二相导通星形三相六状态下,工作过程中磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称,那么三相绕组的电压平衡方程式为:U a U b U c =R 000R 000R i a i b i c +L -M 000L -M 00 L -M d i a d t d i b d t d i c d t +e a e b e c (1)
基于proteus的步进电机电机仿真 摘要:步进电机广泛应用在生产实践的各个领域。它最大的应用是在数控机床的制造中,因为步进电机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以被认为是理想的数控机床的执行元件。本设计利用proteus仿真软件进行电路仿真,系统通过设置四个按键分别控制不进电机的起止、圈数、方向、不进速度,使用1602液晶显示以上参数。整个系统具有稳定性好,实用性强,操作界面友好等优点。 关键词:proteus 仿真不进电机拍数 一、Proteus简介 Proteus ISIS是英国Labcenter公司开发的电路分析与实物仿真软件。它运行于Windows操作系统上,可以仿真、分析(SPICE)各种模拟器件和集成电路,该软件的特点是: ①实现了单片机仿真和SPICE电路仿真相结合。具有模拟电路仿真、数字电路仿真、单片机及其外围电路组成的系统的仿真、RS232动态仿真、I2C调试器、SPI调试器、键盘和LCD系统仿真的功能;有各种虚拟仪器,如示波器、逻辑分析仪、信号发生器等。 ②支持主流单片机系统的仿真。目前支持的单片机类型有:68000系列、8051系列、AVR系列、PIC12系列、PIC16系列、PIC18系列、Z80系列、HC11系列以及各种外围芯片。 ③提供软件调试功能。在硬件仿真系统中具有全速、单步、设置断点等调试功能,同时可以观察各个变量、寄存器等的当前状态,因此在该软件仿真系统中,也必须具有这些功能;同时支持第三方的软件编译和调试环境,如Keil C51uVision2等软件。 ④具有强大的原理图绘制功能。总之,该软件是一款集单片机和SPICE分析于一身的仿真软件,功能极其强大。 二、整体电路分析 如下图,整个设计以STC89C51单片机为中心,由复位电路,时钟电路,电机驱动,步进电机,显示电路等组成,硬件模块如图2-1所示: 图1 硬件模块图
直线电机位置控制算法及仿真 1 绪论 1.1 研究背景及意义 随着工业机械自动化程度的不断升级,有力的带动了上游直线电机在中国的快速成长,国外品牌纷纷加大对中国市场的投入力度,永磁同步直线电机是一种将电能直接转化是动能的转化装置,省去了中间的转换机构,消除了机械转动链的影响,具有速度快,推力大,精度高等诸多优点,因此,广泛应用于精密和高速运行等领域。但是永磁同步直线电机是一个典型的非线性多变量系统,许多非线性因素的存在都会影响到永磁同步直线电机系统的控制性能,如没有知的负载和摩擦等。传统的PID控制方法已经不能满足于永磁机电动机的高精度场合,因此如何设计高性能的直线电机位置控制算法一直以来都是控制领域的热点问题之一。 因此,在传统PID控制方式下,针对多变量、非线性、强耦合的永磁同步直线电机系统设计了一种滑模位置控制器,弥补了常规PID控制跟踪精度不高的缺点。滑模控制具有控制精度高、抗干扰能力强、适用范围广的等优点,因此滑模控制方法已经成是永磁同步直线电机领域重点关注问题,相关研究人员对此进行了深入研究。 1.2 国内外研究现状 直线电机的研究现状 1840年Wheatsone开始提出与制作了略具雏形的直线电机。从那时至今,在160多年的历史记载中,直线电机经历了三个时期。 1840-1955年是探索实验时期: 从1840年到1955年的116年期间,直线电机从设想到实验到部分实验性应用,经历了一个不断探索,屡遭失败的过程。自从Wheatsone提出和试制了直线电机以后,最早明确的提到直线电机文章的是1890年美国匹兹堡市的市长,在
他写的一篇文章中,首先明确的提到了直线电机以及它的专利。然而,由于当时的制造技术、工程材料以及控制技术的水平,在经过断断续续20多年的顽强努力后,最终却没有能获得成功。 至1905年,曾有两人分别建议将直线电动机作为火车的推进机构,一种建议是将初级放在轨道上,另一种建议是将初级放在车辆底部。这些建议无疑是给当时直线电机研究领域的科研人员的一剂兴奋剂,以致许多国家的科研人员都投入了这些研究工作。1917年出现了第一台圆筒形直线电动机,事实上那是一种具有换接初级线圈的直流磁阻电动机,人们试图把它作是导弹发射装置,但其发展并没有超出模型阶段。 至此,从1930-1940年期间,直线电机进入了实验研究阶段,在这个阶段中,科研人员获驭了大量的实验数据,从而对已有理论有了更深一层的认识,奠定了直线电机在今后的应用基础。 从1940-1955年期间世界一些发达国家科研人员,在实验的基础上,又进行了一些实验应用工作。1945年,美国西屋电气公司首先研制成功的电力牵引飞机弹射器,它以7400kW的直线电动机是动力,成功的用4.1s的时间将一架重4535kg的喷气式飞机在165m的行程内由静止加速的188km/h的速度,它的试验成功,使直线电动机可靠性好等的优点受到了应有的重视,随后,美国利用直线电机制成的、用作抽汲钾、钠等液态金属的电磁泵,是的是核动力中的需要。1954年,英国皇家飞机制造公司利用双边扁平型直流直线电机制成了发射导弹的装置,其速度可达1600km/h。在这个阶段中,尤需值得一提的是,直线电机作是高速列车的驱动装置得到了各国的高度重视并计划予以实施。 在1840-1955年期间,是直线电机探索实验和部分实验应用时期,在直线电机与旋转电机的相互竞争中,由于直线电机的成本和效率方面没有能够战胜旋转电机,或者说,直线电机还没能找到它的专属领域,以及直线电机在设计方面也没有突破性的成功,所以直线电机在这一时期始终没有能得到有效的推广。 1956-1970年是开发应用时期: 自1955年以来,直线电机进入了全面的开发阶段,特别是该时期的控制技术和材料的惊人发展,更加助长了这种势头。在这段时期,申请直线机的专利件数也开始急速增加,该时期直线电机专利的增长率超过了所有其他技术领域的平
电磁场仿真软件教程 随着电磁场和微波电路领域数值计算方法的发展,在最近几年出现了大量的电磁场和微波电路仿真软件。在这些软件中,多数软件都属于准3维或称为2.5维电磁仿真软件。例如,Agilent 公司的ADS(Advanced Design System)、AWR公司的Microwave Office、Ansoft公司的Esemble、Serenade和CST公司的CST Design Studio等。目前,真正意义上的三维电磁场仿真软件只有Ansoft公司的HFSS、CST公司的Mafia、CST Microwave Studio、Zeland公司的Fidelity和IMST GmbH公司的EMPIRE。从理论上讲,这些软件都能仿真任意三维结构的电磁性能。其中,HFSS (HFSS是英文高频结构仿真器(High Frequency Structure Simulator)的缩写)是一种最早出现在商业市场的电磁场三维仿真软件。因此,这一软件在全世界有比较大的用户群体。由于HFSS进入中国市场较早,所以目前国内的电磁场仿真方面HFSS的使用者众多,特别是在各大通信技术研究单位、公司、高校非常普及。 德国CST公司的MicroWave Studio(微波工作室)是最近几年该公司在Mafia软件基础上推出的三维高频电磁场仿真软件。它吸收了Mafia软件计算速度快的优点,同时又对软件的人机界面和前、后处理做了根本性的改变。就目前发行的版本而言,CST的MWS的前后处理界面及操作界面比HFSS好。Ansoft也意识到了自己的缺点,在刚刚推出的新版本HFSS (定名为Ansoft HFSS V9.0)中,人机界面及操作都得到了极大的改善。在这方面完全可以和CST媲美。在性能方面,两个软件各有所长。在速度和计算的精度方面CST和ANSOFT 成绩相差不多。值得注意的是,MWS采用的理论基础是FIT(有限积分技术)。与FDTD(时域有限差分法)类似,它是直接从Maxwell方程导出解。因此,MWS可以计算时域解。对于诸如滤波器,耦合器等主要关心带内参数的问题设计就非常适合;而HFSS采用的理论基础是有限元方法(FEM),这是一种微分方程法,其解是频域的。所以,HFSS如果想获得频域的解,它必须通过频域转换到时域。由于,HFSS是用的是微分方法,所以它对复杂结构的计算具有一定的优势。 另外,在高频微波波段的电磁场仿真方面也应当提及另一个软件:ANSYS 。ANSYS是一个基于有限元法(FEM)的多功能软件。该软件可以计算工程力学、材料力学、热力学和电磁场等方面的问题。它也可以用于高频电磁场分析(应用例如:微波辐射和散射分析、电磁兼容、电磁场干扰仿真等)。其功能与HFSS和CST MWS类似。但由于该软件在建模和网格划分过程中需要对该软件的使用规则有详细的了解,因此,对一般的工程技术人员来讲使用该软件有一定困难。对于高频微波波段通信、天线、器件封装、电磁干扰及光电子设计中涉
基于MATLAB的直线电机PID控制器设计 摘要 随着现代工业的飞快发展,控制对象日益复杂,对其的性能控制要求也不断提高,致使人们寻找更好的控制方法,其中以改进PID控制最为典型。PID控制器具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是目前最稳定的控制方法之一。它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。 直线电机是近年来国内外积极研究发展的新型电机之一,凭借自身的特性在以直线运动的工业控制中,有比旋转电机巨大的优越性。可广泛应用于交通运输、起重搬运、物流传输装置、国防及煤矿运输、车床进给等方面,发展前景十分广阔。 传统的比例积分微分( PID) 控制器参数往往因整定不良、性能欠佳,对运行状况的适应性很差。简单的控制又不能很好地适应对象系统特性变化时的最佳控制要求。因此,鉴于控制方法目前仍有广泛应用,对参数整定方法的研究将具有很好的应用价值。本文根据稳定边界法则及Ziegler-Nichol算法,以直线电机控制模型为例介绍如何在MATLAB 工具帮助下整定并验证PID 控制器参数,使参数的整定变得简单、易行,使整定效果更优化。 关键词:直线电机PID控制 MATLAB 控制系统参数整定系统仿真
Abstract: With the fast development of modern industry, more complicated control object, its performance control requirements improve continuously, cause people looking for better control method, which to improve PID control is the most typical example. The PID (Proportional-Integral-Derivative) control is one of the most common control methods at present. Its structure is simple and easy to implement, however, the control effect is perfect and it has a strong robust characteristics. The physical parameters is, meaning of ,theoretical analysis of system is integrity, and it is familiar by the engineering sector, which in the industrial process control has been widely used. Linear motor is one of the studied new motor. Because of its peculiarity, the linear motor performed better than rotary motor in the control systems when the moving route is linear. Its application range extends widely and widely. And it has been applied in many fields. However, the traditional parameter adaptability of proportion-integral-differential (PID) controller to the operating situation is very bad sometimes because the reduction and performance isn't good. Simple control and can't well adapt to changes in the system characteristics of the object of optimal control requirements. Therefore, in view of the control method is currently there are still widely used, to the study of the method of parameter setting will have a good application value. According to the stable boundary principle and Ziegler-Nichol algorithm, this paper introduces how to reduce and validate the PID controller parameter with the help of MATLAB tool taking the linear motor control model as an example. Making the parameters set becomes simple, easy to operate, and make the setting effect more optimization. Key words:Linear motor,PID control, Matlab, Control system, Parameters setting, System simulation
电气与电子信息工程学院 《计算机仿真及应用B》题目 学号: 姓名: 班级: 任课老师:
三相异步电动机的建模与仿真 一.实验题目三相异步电动机的建模与仿真 二.实验原理 三相异步电动机也被称作感应电机,当其定子侧通入电流后,部分磁通将穿过短路环,并在短路环内产生感应电流。短路环内的电流阻碍磁通的变化,致使有短路环部分和没有短路环部分产生的磁通有相位差,从而形成旋转磁场。转子绕组因与磁场间存在着相对运动而产生感应电动势和感应电流,即旋转磁场与转子存在相对转速,并与磁场相互作用产生电磁转矩,使转子转起来,从而实现能量转换。 三相异步电动机具有结构简单,成本较低,制造,使用和维护方便,运行可靠以及质量 较小等优点,从而被广泛应用于家用电器,电动缝纫机,食品加工机以及各种电动工具,小型电机设备中,因此,研究三相异步电动机的建模与仿真。 三.实验步骤 1. 选择模块 首先建立一个新的simulink 模型窗口,然后根据系统的描述选择合适的模块添加至模型窗口中。建立模型所需模块如下: 1) 选择simPowerSystems 模块库的Machines 子模块库下的Asynchronous Machine SI Units 模块作为交流异步电机。 2) 选择simPowerSystems 模块库的Electrical Sources 子模块库下的Three-Phase Programmable Voltage Source 模块作为三相交流电源。 3) 选择simPowerSystems 模块库的Three-Phase Library 子模块库下的Three-Phase Series RLC Load 模块作为串联RLC 负载。 4) 选择simPowerSystems 模块库的Elements 子模块库下的Three-Phase Breaker 模块作为 三相断路器,Ground 模块作为接地。 5) 选择SimPowerSystems 模块库的Measurements 子模块库下的Voltage Measurement 模块 作为电压测量。 6) 选择Sources 模块库下的Constant 模块作为负载输入。 7) 选择Signals Rounting 模块库下的Bus Selector 模块作为直流电动机输出信号选择器。 8) 选择Sinks 模块库下的Scope 模块。 9) 选择SimPowerSystems 模块库的Measurements 子模块库下的Three-phase V-I Measurements 用于创建子系统。 2. 搭建模块将所需模块放置合适位置,再将模块从输入端至输出端进行相连,搭建完的串电阻起 动simulink 模型如图 1 所示
直线电机的结构及工作原理 来源:本站整理作者:佚名2010年02月25日 17:43 分享 订阅 [导读]直线电机的结构直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相 关键词:直线电机 直线电机的结构 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理 设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动. 通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设引起涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将按费来明法则产生连续的推力F。 直线电机的特点 高速响应由于系统中直接取消了一些响应时间常数较大的如丝杠等机械传动件,使整个闭环控制系统动态响应性能大大提高,反应异常灵敏快捷。 位精度高线驱动系统取消了由于丝杠等机械机构引起的传动误差减少了插补时因传动系统滞后带来跟踪误差。通过直线位置检测反馈控制,即可大大提高机床的定位精度。传动环节的弹性变形、摩擦磨损和反向间隙造成的运动滞后现象,同时提高了其传动刚度。 速度快、加减速过程短 行程长度不受限制在导轨上通过串联直线电机,就可以无限延长其行程长度。 动安静、噪音低由于取消了传动丝杠等部件的机械摩擦,且导轨又可采用滚动导轨或磁垫悬浮导轨(无机械接触),其运动时噪音将大大降低。 效率高由于无中间传动环节,消除了机械摩擦时的能量损耗。 直线电机的应用 直线电机主要应用于三个方面: 应用于自动控制系统,这类应用场合比较多; 作为长期连续运行的驱动电机; 应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 U槽无刷直线电机可以直接驱动,无需将转动转为线性运动,机械结构简单可靠。电机运行超平稳,无齿槽效应,动态响应速度极快,惯量小,加速度可达20G,速度达到10-30m/s,低速1μm/s时运动平滑,刚性高,结构紧凑,可选配直线编码器做高精度位置控制,其位置精度取决于所选编码器。
安徽工业大学工商学院课程设计(论文)同步电机模型的MATLAB仿真 学生姓名:李春笋 学号:111842161 专业班级:气1142 指导教师:范国伟 2013年12月20日
摘要 采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。再使用MATLAB中用于仿真模拟系统的SIMULINK 对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。 The Simulation Platform of Synchronous Machine by MATLAB Abstract: The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance. Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK