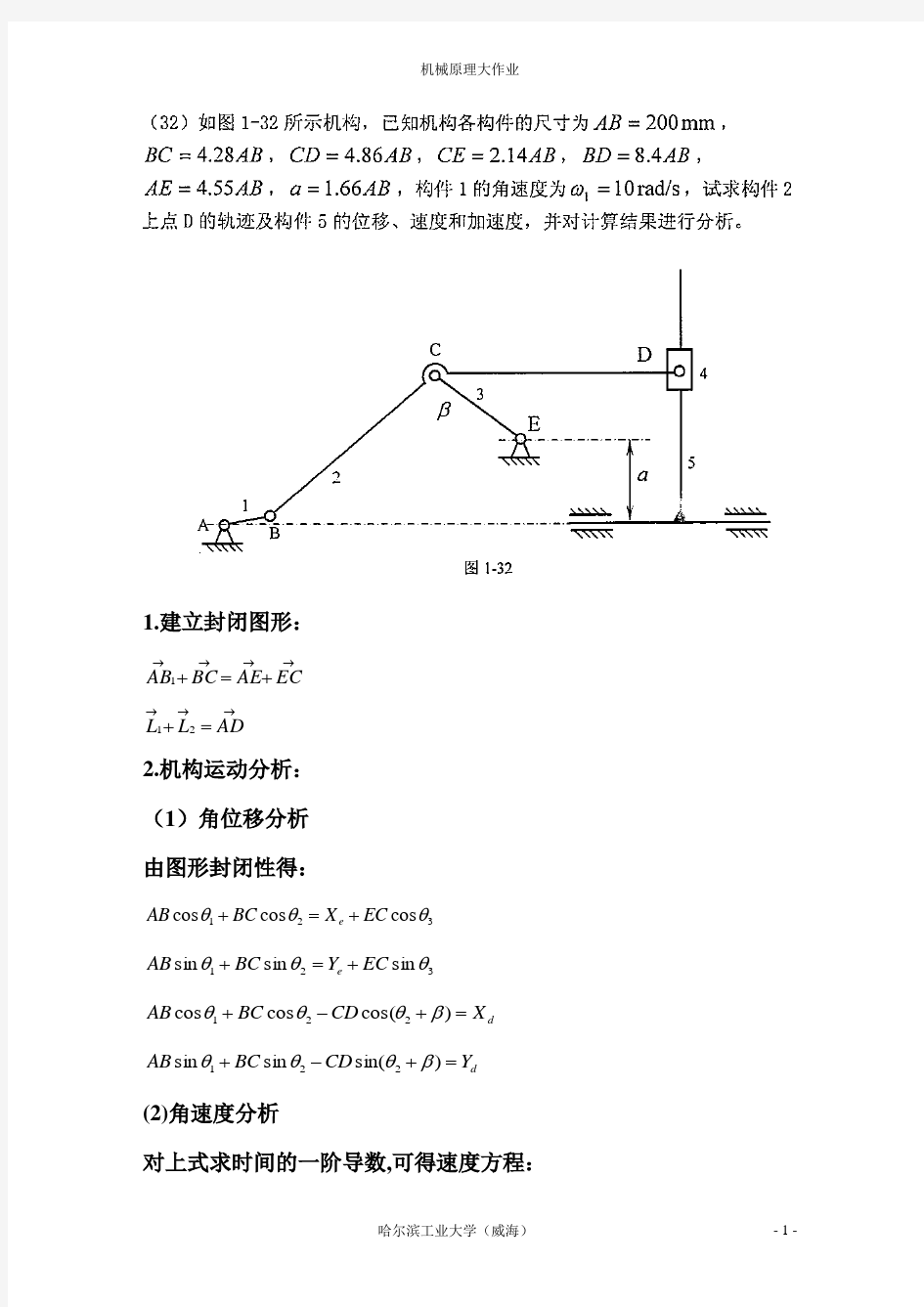
1.建立封闭图形:
→
→
→
→
+=+EC AE BC AB 1
→
→→=+AD L L 21
2.机构运动分析: (1)角位移分析 由图形封闭性得:
321cos cos cos θθθEC X BC AB e +=+ 321sin sin sin θθθEC Y BC AB e +=+ d X CD BC AB =+-+)cos(cos cos 221βθθθ d Y CD BC AB =+-+)sin(sin sin 221βθθθ
(2)角速度分析
对上式求时间的一阶导数,可得速度方程:
113322sin sin sin ωθωθωθAB EC BC =+- 113322cos cos cos ωθωθωθAB EC BC -=- 112222sin )sin(sin ωθωβθωθAB V CD BC dx =-++-
112222cos )cos(cos ωθωβθωθAB V CD BC dy -=-+-
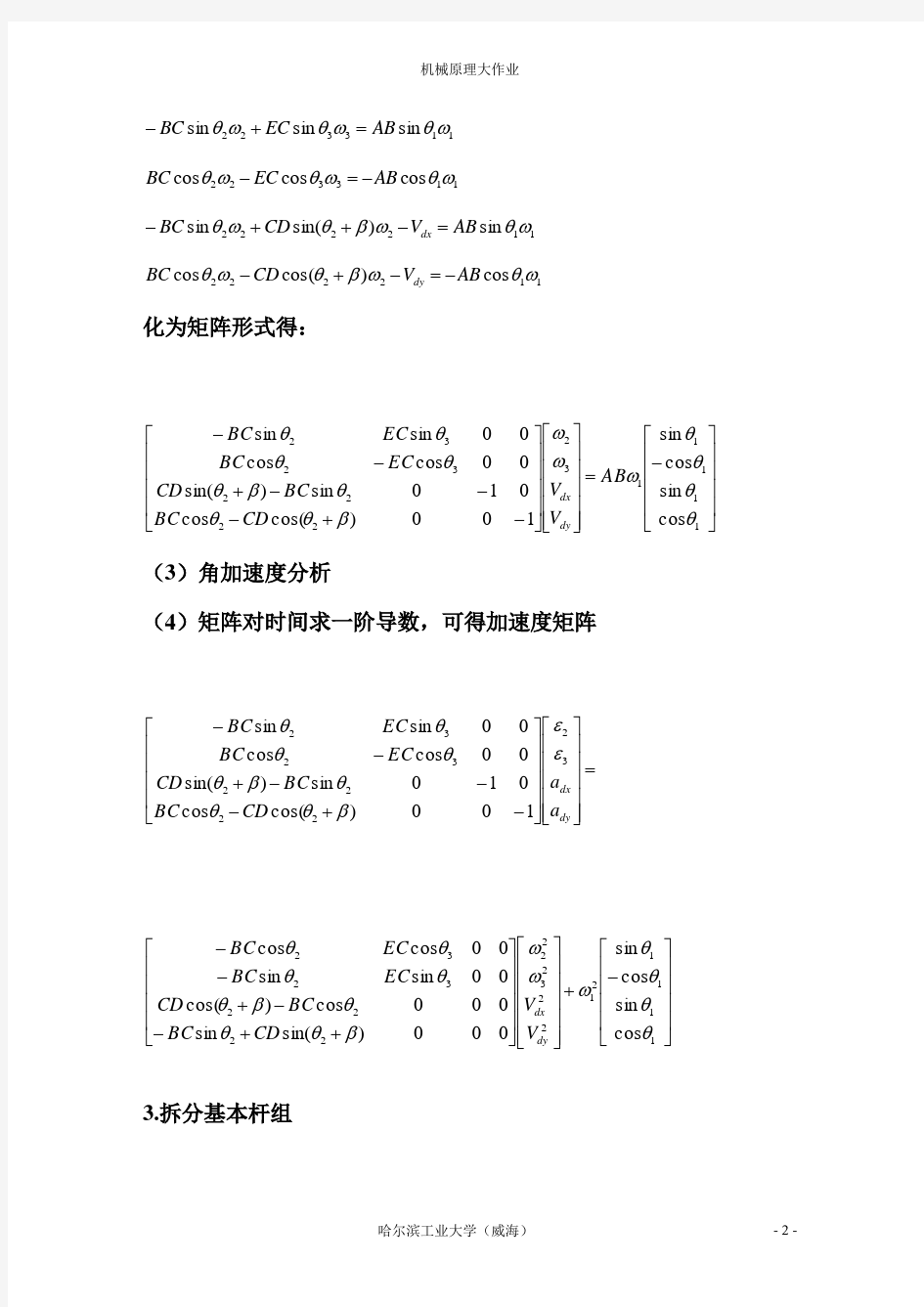
化为矩阵形式得:
??????
???
???-=???
??????????????????
??
???
-+---+--11111
3222223232cos sin cos sin 100)
cos(cos 010sin )sin(00
cos cos 00
sin sin θθθθωωωβθθθβθθθθθAB V V CD BC BC CD EC BC EC BC dy dx
(3)角加速度分析
(4)矩阵对时间求一阶导数,可得加速度矩阵
=
???
??
??
??????????????
??
???
-+---+--dy dx a a CD BC BC CD EC BC EC BC 3222223232100)cos(cos 010sin )sin(00cos cos 00
sin sin εεβθθθβθθθθθ ?
?????
???
???-+??????
???????????????
??
???
++--+--111121
2
2
2
3
2
2
22223232cos sin cos sin 000)
sin(sin 000cos )cos(00sin sin 00cos cos θθθθωωωβθθθβθθθθθdy dx
V V CD BC BC CD EC BC EC BC
3.拆分基本杆组
机构由2个II级杆组和1个I级杆组构成,所以机构为II级机构。
4.编制机构运动分析运动程序
(1)D点的轨迹程序:
l1=200;
l2=4.28*l1;
l21=4.86*l1;
l3=2.14*l1;
xe=4.24*l1;
ye=1.66*l1;
p=0.7615*pi;
t=0:.0984:2*pi;
xb=200*cos(20*pi*t);
yb=200*sin(20*pi*t);
c=(ye-yb).^2+(xe-xb).^2;
w2=acos((l2^2+c-l3^2)/(2*l2*sqrt(c)))+atan((ye-yb)/(xe-xb)); xc=xb+l2*cos(w2);
yc=yb+l2*sin(w2);
xd=xc-l21*cos(w2+p);
yd=yc-l21*sin(w2+p);
plot(xd,yd),grid on
title('点D的轨迹图像')
xlabel('xd'),ylabel('yd')
得D点得轨迹图像如下:
(2)构件5的位移程序:
l1=200;
l2=4.28*l1;
l21=4.86*l1;
l3=2.14*l1;
xe=4.24*l1;
ye=1.66*l1;
p=0.7615*pi;
t=0:.0984:2*pi;
xb=200*cos(20*pi*t);
yb=200*sin(20*pi*t);
c=(ye-yb).^2+(xe-xb).^2;
w2=acos((l2^2+c-l3^2)/(2*l2*sqrt(c)))+atan((ye-yb)/(xe-xb)); xc=xb+l2*cos(w2);
yc=yb+l2*sin(w2);
xd=xc-l21*cos(w2+p);
yd=yc-l21*sin(w2+p);
plot(t ,xd),grid on
title('构件5的位移图像')
xlabel('t'),ylabel('位移')
得构件5的位移图像如下:
(3)构件5的速度程序:l1=200;
l2=4.28*l1;
l21=4.86*l1;
l3=2.14*l1;
xe=4.24*l1;
ye=1.66*l1;
p=0.7615*pi;
t=0:.0984:2*pi;
xb=200*cos(20*pi*t);
yb=200*sin(20*pi*t);
c=(ye-yb).^2+(xe-xb).^2;
w2=acos((l2^2+c-l3^2)/(2*l2*sqrt(c)))+atan((ye-yb)/(xe-xb)); xc=xb+l2*cos(w2);
yc=yb+l2*sin(w2);
xd=xc-l21*cos(w2+p);
yd=yc-l21*sin(w2+p);
v=diff(xd);
plot(t(1:end-1),v),grid on
title('构件5的速度图像')
xlabel('t'),ylabel('速度')
得构件5的速度图像如下:
(4)构件5的加速度程序:
l1=200;
l2=4.28*l1;
l21=4.86*l1;
l3=2.14*l1;
xe=4.24*l1;
ye=1.66*l1;
p=0.7615*pi;
t=0:.0984:2*pi;
xb=200*cos(20*pi*t);
yb=200*sin(20*pi*t);
c=(ye-yb).^2+(xe-xb).^2;
w2=acos((l2^2+c-l3^2)/(2*l2*sqrt(c)))+atan((ye-yb)/(xe-xb)); xc=xb+l2*cos(w2);
yc=yb+l2*sin(w2);
xd=xc-l21*cos(w2+p);
yd=yc-l21*sin(w2+p);
v=diff(xd);
plot(t(1:end-1),v),grid on
title('构件5的速度图像')
xlabel('t'),ylabel('速度')
得构件5的加速度图像:
兰州2017年7月4日于家属院复习资料 第2章平面机构的结构分析 1.组成机构的要素是和;构件是机构中的单元体。 2.具有、、等三个特征的构件组合体称为机器。 3.从机构结构观点来看,任何机构是由三部分组成。 4.运动副元素是指。 5.构件的自由度是指;机构的自由度是指。 6.两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。 7.机构具有确定的相对运动条件是原动件数机构的自由度。 8.在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。 9.平面运动副的最大约束数为,最小约束数为。 10.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。 11.计算机机构自由度的目的是______。 12.在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。 13.计算平面机构自由度的公式为F= ,应用此公式时应注意判断:(A) 铰链,(B) 自由度,(C) 约束。 14.机构中的复合铰链是指;局部自由度是指;虚约束是指。 15.划分机构的杆组时应先按的杆组级别考虑,机构的级别按杆组中的级别确定。 16.图示为一机构的初拟设计方案。试: (1〕计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。 (2)如此初拟方案不合理,请修改并用简图表示。 题16图题17图 17.在图示机构中,若以构件1为主动件,试: (1)计算自由度,说明是否有确定运动。
(2)如要使构件6有确定运动,并作连续转动,则可如何修改?说明修改的要点,并用简图表示。18.计算图示机构的自由度,将高副用低副代替,并选择原动件。 19.试画出图示机构的运动简图,并计算其自由度。对图示机构作出仅含低副的替代机 构,进行结构分析并确定机构的级别。 题19图 题20图 20.画出图示机构的运动简图。 21. 画出图示机构简图,并计算该机构的自由 度。构件3为在机器的导轨中作滑移的整体构件,构件2在构件3的导轨中滑移,圆盘1的固定轴位于偏心处。 题21图 题22图 22.对图示机构进行高副低代,并作结构分析,确定机构级别。点21,P P 为在图示位置时,凸轮廓线在接触点处的曲率中心。 第3章 平面机构的运动分析 1.图示机构中尺寸已知(μL =mm ,机构1沿构件4作纯滚动,其上S 点的速度为v S (μV =S/mm)。 (1)在图上作出所有瞬心; (2)用瞬心法求出K 点的速度v K 。
机械原理大作业 This model paper was revised by the Standardization Office on December 10, 2020
机械原理大作业三 课程名称:机械原理 设计题目:齿轮传动设计 院系: 班级: 设计者: 学号: 指导教师: 设计时间: 1、设计题目 机构运动简图 机械传动系统原始参数
2、传动比的分配计算 电动机转速min /745r n =,输出转速m in /1201r n =,min /1702r n =, min /2303r n ,带传动的最大传动比5.2max =p i ,滑移齿轮传动的最大传动比4m ax =v i ,定轴齿轮传动的最大传动比4m ax =d i 。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为5.2max =p i ,滑移齿轮的传动比为321v v v i i i 、、,定轴齿轮传动的传动比为f i ,则总传动比 令 4max 1==v v i i 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数: 35,18,39,14,43,111098765======z z z z z z ;它们的齿顶高系数1=* a h ,径向间 隙系数25.0=*c ,分度圆压力角020=α,实际中心距mm a 51'=。
Harbin Institute of Technology 机械原理大作业一 课程名称: 机械原理 设计题目: 连杆机构运动分析 院 系: 机电工程学院 班 级: 设 计 者: 学 号: 指导教师: 设计时间: 1.运动分析题目 (11)在图所示的六杆机构中,已知: AB l =150mm, AC l =550mm, BD l =80mm, DE l =500mm,曲柄以等角速度1w =10rad/s 沿逆时针方向回转,求构件3的角速度、角加速度和构件5的位移、速度、加速度。 2.机构的结构分析 建立以点A 为原点的固定平面直角坐标系A-x, y,如下图: 机构结构分析 该机构由Ⅰ级杆组RR (原动件1)、Ⅱ级杆组RPR (杆2及滑块3)和Ⅱ级杆组RRP (杆4及滑块5)组成。 3.建立组成机构的各基本杆组的运动分析数学模型 原动件1(Ⅰ级杆组RR ) 由图所示,原动件杆1的转角a=0-360°,角速度1w =10rad/s ,角加速度1a =0,运动副A 的位置坐标A x =A y =0,速度
(A, A),加速度 (A
, A ), 原动件1的长度AB l =150mm 。 求出运动副B 的位置坐标(B x , B y )、速度 (B
,B)和加速度 (B , B)。
杆2、滑块3杆组(RPR Ⅱ级杆组) 已出运动副B 的位置(B x , B y )、速度 (B ,B ) 和加速度
(B , B ), 已知运动副C 的位置坐标C x =0, C y =550mm,速度,加速度,杆长AC l =550mm 。 求出构件2的转角b,角速度2w 和角加速度2a . 构件二上点D 的运动
1.如图所示传动系统,试计算: 1)轴A的转速(r/min); 2)轴A转1转时,轴B转过的转数; 3)轴B转1转时,螺母C移动的距离。 解: 1)轴A的转速: n A=1440×5/22×23/23×20/20×20/80=81.8(r/min) 2)轴A转1转时,轴B转过的转数: n B=1440×5/22×35/30×30/50×24/40×1/84=1.7(r/min)则轴B在轴A转1转时转过的转数为:N=81.8/1.7=48(r) 3)轴B转1转时,螺母C移动的距离为: Lc=1440×5/22×35/30×30/50×2/20×10×1/84=4.77(mm)
2.某传动系统如图所示要求: (1)写出此传动路线的表达式并说明有多少种转速; (2)计算主轴极限转速n max和n min。 解: (1)主运动的传动路线表达式:ⅠⅡⅢⅣⅤⅥ 27/43 39/39 电动机Ⅰ—27/49—Ⅱ— 35/35 —Ⅲ—26/52—24/54—Ⅳ—50/28—Ⅴ—30/67—Ⅵ(主轴) 31/39 (2)n max=1440×27/49×35/35×39/39×50/28×30/67=634.4(r/min) N min=1440×27/49×27/43×26/52×24/54×30/67=49.6(r/min)
3.按图所示传动系统作下列各题: 1、写出传动路线表达式; 2、分析主轴的转速级数; 3、计算主轴的最高最低转速。 (注:图中M1为齿轮式离合器) 解: 对于a): 传动路线表达式: 电动机—Ⅰ—Ⅱ—Ⅲ—Ⅳ—Ⅴ—Ⅵ(主轴) 主轴的转速级数:3×3×2=18级 =1430×90/150×36/22×42/26×178/200×27/63=865.08r/min 主轴的最高转速:n max 主轴的最低转速:n =1430×90/150×17/42×22/45×178/200×27/63× min 17/58=18.98r/min 对于b): 传动路线表达式: 电动机—Ⅰ—Ⅱ—Ⅲ(主轴) 主轴的转速级数:3×4=12级 =1440×100/325×40/58×61/37=503.8r/min 主轴的最高转速:n max 主轴的最低转速:n =1440×100/325×26/72×37/61×37/61×17/81=12.35r/min min
大作业1 连杆机构运动分析 1、运动分析题目 如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、建立坐标系 建立以点A 为原点的固定平面直角坐标系
图1 3、对机构进行结构分析 该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。 图2 图 3
图 4 4、各基本杆组运动分析的数学模型 (1)同一构件上点的运动分析: 图 5 如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长 i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
=cos =280cos B i x l ??; =sin =280sin B i y l ??; = =-sin =-B xB i B dx v l y dt ω?ω; ==cos =;B yB i B dy v l x dt ω?ω 222B 2==-cos =-B xB i d x a l x dt ω?ω; 2222==-sin =-B yB i B d y a l y dt ω?ω。 (2)RRRII 级杆组的运动分析: 图 6 如图6所示是由三个回转副和两个构件组成的II 级组。已知两杆 的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。求内运动副C 的位置(C C x 、y )、速度(xC yC v 、v )、加速度(xC yC a 、a )以及两杆
《机械系统设计》 课程大作业—I 棒料校直机功能原理设计 院(系) 专业 学生 学号 班号 2015年4月
棒料校直机功能原理设计 1 设置棒料校直机功能原理设计的目的 功能原理设计是机械系统设计的最初环节,主要是针对产品的主要功能提出一些原理性构思,也就是针对产品的功能进行原理性设计! 针对某一产品的主要功能,设计人员在进行了大量相关资料查阅之后,应设计出几种不同的功能原理方案来,以便从中选出较理想的一个为下一步总体设计奠定基础。针对产品主要功能而进行的功能原理设计这一步,在整个设计中是非常重要的一环。一个好的功能原理设计应既有创新构思,同时又能满足用户的需求。 因此,在培养学生的机械系统设计能力时,不仅要注重机构和结构设计的培养和训练,而且更应注重功能原理设计的培养和训练。由于功能原理设计有其自身的特点和工作内容,因此,本大作业将主要针对功能原理设计进行。 2棒料校直机功能原理设计目的 棒料校直是机械零件加工前的一道准备工序。若棒料弯曲,就要用大棒料才能加工出一个小零件,如图1所示,这种加工方式材料利用率不高,经济性差。故在加工零件前需将棒料校直。 图1 待校直的弯曲棒料
3 设计数据与要求 请根据以下设计数据,进行棒料校直机的功能原理设计。 1) 棒料材料:需校直的棒料材料为45钢 2) 工作环境及环保要求:室内工作,希望冲击振动小、噪声小; 3) 工作寿命:使用期限为10年,每年工作300天,每天工作16小时; 4) 设备保养维护要求:每半年作一次保养,大修期为3年。 5) 棒料校直机原始设计数据如表1所示。 表1 棒料校直机原始设计数据 4棒料校直机功能原理设计过程 功能原理方案设计的任务是:针对某一确定的功能要求,去寻求一些物理效应并借助某些作用原理来求得一些实现该功能目标的解法原理来;或者说,功能原理设计的主要工作内容是:构思能实现功能目标的新的解法原理。这一步设计工作的重点应放在尽可能多地提出创新构思上,从而使思维尽量“发散”,以力求提出较多的解法供比较和优选。此时,对构件的具体结构、材料和制造工艺等则不一定要有成熟的考虑,故只需用简图或示意图的形式 5 棒料校直机功能原理设计要求 1) 用黑箱法寻找总功能的转换关系,给出棒料校直机的黑箱图; 2) 对棒料校直机进行总功能分解,绘制“技术过程流程图”和“总功能分解图”; 3) 建立棒料校直机的“功能结构图” 4) 寻找原理解法和原理解组合。 6 设计参考资料 教材中第二章机械系统总体设计中“露天矿开采挖掘机的原理方案设计” 7 作业成绩及其与本门课程总成绩的关系 满分4分,记入100分的总课程成绩。 根据表1任选一组进行设计。
题1 一、填空题(10分) 1.在平面机构中,一个运动副引入的约束m 的变化范围是。 在空间机构中,一个运动副引入的约束数m的变化范围是。2.某机器的主轴平均角速度ωm= 100rad/s, 机器运转的速度不均匀系数δ= 0.05,则该机器的最大角速度ωmax = ,最小角速度ω = 。 min 3.六杆机构有个瞬心。 4.平衡技术中常把远低于机器的一阶固有频率的转子称为。常把接近或超过机器的一阶固有频率的转子称为。 5.齿条型刀具范成切齿时,齿轮的模数由决定。 6.相对瞬心的特点是,绝对瞬心的特点是。 二、选择题(10分) 1.下面说法正确的是:() A.机构的死点与自锁是一回事;B.机构处于死点α=0;C.机构处于死点γ=0;D.机构的死点与摩擦力有关。2.下面说法正确的是:() A.齿条型刀具范成切齿时,分度圆的半径由齿条模数决定; B.齿条型刀具范成切齿时,齿轮的模数由齿条移动速度和轮坯转动角速度的比值决定; C.齿条型刀具范成切齿时,齿轮是不是标准齿轮由加工终了时齿条与轮坯的相对位置决定;
D.齿轮传动中正传动与齿轮正变位是一回事,只是提法不同 3.下面说法正确的是() A.虚约束不是实实在在的约束,是没用的,所以等于不存在;B.虚约束是不存在的约束; C.计算机构的自由度时可以去掉虚约束,在实际机构中也可以拆除它; D.虚约束满足一定的条件,若不满足条件它将会变成实际约束。4.下面说法正确的是() A.矩形螺纹多用于连接;B.三角螺纹多用于连接; C.三角螺纹多用于传动;C.矩形螺纹、三角螺纹均多用于传动。 5.下列关于单万向联轴节叙述正确的是:() A.不可能等于1 ;B.可能等于1; C.可以传递成任意角度两轴的运动;D.不可以传递成任意角度两轴的运动。 三、判断题(5分) 1.运动链选择不同构件作机架,机构的级别不变。() 2.齿轮与齿条啮合传动分度面与节圆可能不重合。() 3.齿轮传动中ε=1.3,说明在齿轮转过一个基圆齿距时30% 的时间2对齿啮合。() 4.只要满足机构的自由度=机构的主动件数,机构就一定有有意义的确定的运动。()
五. 计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
无复合铰链和虚约束;有局部自由度;(3分) 自由度:F=3n-2P L-P h (2分)n=4 P L =4 P h=2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动(1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有 确定运动。 E处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =10 P h=0 (3分) =3*7-2*10=1 (1分) 机构具有确定运动(1分) 5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确 定运动。
机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电 动机的转速min /14451r n =,求带轮转速的大小和方向。 47.150 384248 4258''''53164261'16-≈????-='-== z z z z z z n n i min /98347 .11445 ''1616r i n n -≈-== 其运动方向与1相反
机械原理大作业 二、题目(平面机构的力分析) 在图示的正弦机构中,已知l AB =100 mm,h1=120 mm,h2 =80 mm,W1 =10 rad/s(常数),滑块2和构件3的重量分别为G2 =40 N和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。试用解析法求机构在Φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶M 。 b Array 二、受力分析图
三、算法 (1)运动分析 AB l l =1 滑块2 22112112/,/s m w l a s m w l v c c == 滑块3 21113113/cos ,sin s m l w v m l s ??== 212 113/sin s m w l a ?-= (2)确定惯性力 N w l g G a m F c 2 1122212)/(== N w l g G a m F 121133313sin )/(?-== (3)受力分析 i F F i F F x R D R x R C R 43434343,=-= j F j F F R R R 232323-==
j F i F j F i F F R x R y R x R R 2121121212--=+= j F F F y R x R R 414141+= 取移动副为首解副 ① 取构件3为分离体,并对C 点取矩 由0=∑y F 得 1323F F F r R -= 由0=∑x F 得 C R D R F F 4343= 由 ∑=0C M 得 2112343/cos h l F F R D R ?= ②取构件2为分离体 由0=∑x F 得 11212cos ?R x R F F = 由0 =∑y F 得 1123212sin ?F F F R y R -= ③取构件1为分离体,并对A 点取矩 由0=∑x F 得 x R x R F F 1241= 由0 =∑ y F 得 y R y R F F 1241= 由0=A M 得 1132cos ?l F M R b = 四、根据算法编写Matlab 程序如下: %--------------已知条件---------------------------------- G2=40; G3=100; g=9.8; fai=0; l1=0.1; w1=10; Fr=400; h2=0.8; %--------分布计算,也可将所有变量放在一个矩阵中求解------------------- for i=1:37 a2=l1*(w1^2); a3=-l1*(w1^2)*sin(fai); F12=(G2/g)*a2;
机械原理计算题
五. 计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 收集于网络,如有侵权请联系管理员删除
收集于网络,如有侵权请联系管理员删除 3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 无复合铰链和虚约束;有 局部自由度;(3分) 自由度:F=3n-2P L -P h (2分)n=4 P L =4 P h =2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动 (1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 E 处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=7 P L =10 P h =0 (3分) =3*7-2*10=1 (1 分) 机构具有确定运动 (1分)
收集于网络,如有侵权请联系管理员删除 5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为 48',50',42',38',58,42654321======z z z z z z ,电动机的转速m in /14451r n =,求带轮转速的大小和方向。 47.150 3842484258''''53164261'16-≈????-='-==z z z z z z n n i min /98347 .11445''1616r i n n -≈-==
机械原理大作业三 课程名称: 机械原理 级: 者: 号: 指导教师: 设计时间: 1.2机械传动系统原始参数 设计题目: 系: 齿轮传动设计 1、设计题 目 1.1机构运动简图 - 11 7/7777777^77 3 UtH TH7T 8 'T "r 9 7TTTT 10 12 - 77777" 13 ///// u 2
电动机转速n 745r/min ,输出转速n01 12r/mi n , n02 17r /mi n , n°323r/min,带传动的最大传动比i pmax 2.5 ,滑移齿轮传动的最大传动比 i vmax 4,定轴齿轮传动的最大传动比i d max 4。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实 现。设带传动的传动比为i pmax 2.5,滑移齿轮的传动比为9、心、「3,定轴齿轮传动的传动比为i f,则总传动比 i vi i vmax 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、 7、8 9和10为角度变位齿轮,其齿数: Z5 11,Z6 43,Z7 14,Z8 39,Z9 18,乙。35 ;它们的齿顶高系数0 1,径向间隙
系数c 0.25,分度圆压力角200,实际中心距a' 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:Z11 z13 13,乙 2 z14 24。它们的齿顶高系数d 1,径向间隙系数c 0.25,分度圆压力角200,实际中心距 a' 46mm。圆锥齿轮15和16选择为标准齿轮令13,乙 6 24,齿顶高系数 h a 1,径向间隙系数c 0.20,分度圆压力角为200(等于啮合角’)。 4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算 4.1滑移齿轮5和齿轮6
机械原理课程作业(一) 平面连杆机构的运动分析 (题号:1-A ) 班级 03021101 学号 姓名 成绩 同组者 完成日期 2014年1月1日
目录 一.题目及原始数据 (3) 二.平面连杆机构运动分析方程 (4) 三.计算程序框图 (6) 四.计算源程序 (7) 五.计算结果 (13) 六.运动线图分析 (17) 七.运动线图分析 (19) 八.体会及建议 (20) 九.参考书目 (20)
一. 题目及原始数据 1.如图1所示平面六杆机构,试用计算机完成其运动分析。 图1 设已知各构件的尺寸如表1所示,又已知原动件1以等角速度沿逆时针方向回转,试求各从动件的角位移、角速度、角加速度以及E 点的位移、速度、加速度的变化情况。已知其尺寸参数如下表所示: 表1 平面六杆机构尺寸参数 () mm 2、题目要求与成员组成及分工: (1)题目要求: 三人一组计算出原动件从0到360时(计算点数N=37)所要求的各运动变量的大小,并绘出运动曲线图及轨迹曲线,本组选取题号为:1—A ,1—B,1-C 组。 (2)分工比例: 学号 姓名 分工 2011300652 张正栋 报告书写,制图、程序 2011300620 肖川 制图 2011300622 尹志成 方程推导 组号 1l l 2 l 3 l 4 l 5 l 6 α A B C 2-A 2-B 3-C 26.5 67.5 87.5 52.4 43 600 l 2=116.6 l 2=111.6 l 2=126.6
二. 平面连杆机构运动分析方程 1. 位置方程 在图1的直角坐标系中,建立该六杆机构的封闭矢量方程: 将上式写成在两坐标轴上的投影式,并改写成方程左边尽含未知量的形式,即得 1122334112233' 1122226655'1122226655 cos cos cos sin sin sin cos cos cos()cos cos sin sin sin()sin sin G G L L L L L L L L L L x L L L L L y L L θθθθθθθθπαθθθθθπαθθθ??+?=?+? ?+?=?? ??+?-?-+=-?-????+?-?-+=-?-??将上式化简可得: 2233411223311' 222255664'22225566cos cos cos sin sin sin cos cos()cos cos sin sin()sin sin G G L L L L L L L L L L L x L L L L L y θθθθθθθθαθθθθαθθ??-?=-?? ?-?=-?? ??+?-+?+?=-???+?-+?+?=? 由以上各式即可得。 2. 速度方程 根据A ω=ω1B ,可得 222333111222333111'2222 22555666'222222555666sin sin sin cos cos cos sin sin()sin sin 0cos cos()cos cos 0L L L L L L L L L L L L L L θωθωθωθωθωθωθωθαωθωθωθωθαωθωθω?-??+??=??? ??-??=-??? ?-??-?-?-??-??=????+?-?+??+??=?化为矩阵形式为: 2233 22233 3'2 22255 665'2222 55 666111111111sin sin 00 cos cos 00sin()sin 0sin sin cos()cos 0 cos cos sin cos sin cos L L L L L L L L L L L L L L L L θθωθθωθαθ θθωθαθθθωθθωθθ?? ?? -??? ????-?? ????????-?--?-?-??????????-+????? ?????-??=????-????? ?? ??? 3. 加速度方程
五、计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 C处就是复合铰链;无局部自由度与虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 C处就是复合铰链;F就是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 3.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 无复合铰链与虚约束;有局部自由度;(3分) 自由度:F=3n-2P L-P h (2分)n=4 P L =4 P h=2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动 (1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 E处就是复合铰链;无局部自由度与虚约
束;(3分) 自由度:F=3n-2P L -P h (2分)n=7 P L =10 P h =0 (3分) =3*7-2*10=1 (1分) 机构具有确定运动 (1分) 5.计算图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’与4’啮合。又移动双联齿轮b 使齿轮5’与6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电动机的转速m in /14451r n =,求带轮转速的大小与方向。 47.1503842484258''''53164261'16-≈????-='-==z z z z z z n n i min /98347 .11445''1616r i n n -≈-== 其运动方向与1相反 7.如 图,已知 z 1=6, z 2=z 2, =25, z 3=57, z 4=56,求 i 14 ?
机械系统设计 课程作业 打孔机的设计) 一、设计任务书. (1) 二、确定总共能(黑箱) (3) 三、确定工艺原理 (3) (一)机构的工作原理: (3) (二)原动机的选择原理 (3)
(三)传动机构的选择和工作原理 (4) 四、工艺路线图 (5) 五、功能分解(功能树) (5) 六、确定每种功能方案,形态学矩阵 (6) 七、系统边界 (8) 八、方案评价 (8) 九、画出方案简图 (9) 十、总体布局图 (11) 十一、主要参数确定 (12) 十二、循环图 (17) 一、设计任务书
表1
、确定总共能(黑箱) ~220V 噪声 发热 图1 三、确定工艺原理 (一)机构的工作原理: 该系统由电机驱动,通过变速传动将电机的 1450r/min 降到 主轴的2r/min ,与传动轴相连的各机构控制送料,定位,和 进刀等工 艺动作,最后由凸轮机 通过齿轮传动带动齿条上下 平稳地运动,这样动力头也就能带动刀具平稳地上下移动从 而保证了较高的加工质量。 (二)原动机的选择原理 (1)原动机的分类 原动机的种类按其输入能量的不同可以分为两类: A. —次原动机 此类原动机是把自然界的能源直接转变为机械能,称为一 次原动机。 属于此类原动机的有柴油机,汽油机,汽轮机 和燃汽机等。 B.二次原动机 此类原动机是将发电机等能机所产生的各种形态的能量转 变为机械能,称为二次原动机。 属于此类原动机的有电动机, 液压马达,气压马达,汽缸和液压缸等。 (2) 选择原动机时需考虑的因素: 1:考虑现场能源的供应情况。 2:考虑原动机的机械特性和工作制度与工作相匹配。 3:考虑工作机对原动机提出的启动,过载,运转平稳等方 面的要求。 被加工工件 黑箱 有孔的工件
第1课(3课时) 课程基本介绍: ⑴与《机械设计》课程的基本区别: 研究对象的基本不同,研究方法的基本区别 ⑵课程的训练目的和方法: 因为同学们均为四年级,大家所从事的毕业设计研究方向不同,所以教学目的为尽可能对每个同学所从事的具体工作有所帮助。 训练方法包括较多的讨论课,讨论以每人的大作业为基础,要求采用书面作业结合多媒体(以PowerPoint形式)表现手段,每人分别介绍自己的作业,教师加以点评。 ⑶考核的基本办法: 以教学过程检查和期末考试相结合的方式:大作业4个,每个占10分,共40分,课堂点名10次,每次2分,共20分,考试占40分。 正式教学开始 1.绪论 教学重点:帮助同学建立系统论的观点,从《机械设计》课程的零部件设计的思路建立机械系统的设计理念,激发对机械系统设计的兴趣。 教学难点:机械系统的体系 1.1机械与机械系统 1.1.1系统的概念
举例说明: 例1:本人的硕士研究课题:一个液压回转系统的研究 重点说明:从机械零件的最佳设计角度能实现的效果与从系统的角度能完成的效果比较。 引申出系统设计思想与零件设计的很大区别。 例2:自动控制技术的发展历程: 从自动控制技术的发生、发展,以及从导弹、宇航一直到民用的发展历程,介绍系统化的设计思想和思路。 例3:系统论在经济学和人文科学领域的一些应用: 以房地产发展为例,尝试说明系统论在经济学上的一些应用。 1.1.2机械系统的基本组成 子系统:动力系统、传动系统、执行系统、操纵及控制系统 举例说明: 例1:汽车 例2:《机械设计》中所有人均完成的千斤顶 1.2机械系统设计的任务 1.2.1从系统的观点出发 重点:与外部环境的相互影响,以汽车设计为例 1.2.2合理确定系统功能
连杆的运动的分析 一.连杆运动分析题目 图1-13 连杆机构简图 二.机构的结构分析及基本杆组划分 1.。结构分析与自由度计算 机构各构件都在同一平面内活动,活动构件数n=5, PL=7,分布在A、B、C、E、F。没有高副,则机构的自由度为 F=3n-2PL-PH=3*5-2*7-0=1 2.基本杆组划分 图1-13中1为原动件,先移除,之后按拆杆组法进行拆分,即可得到由杆3和滑块2组成的RPR II级杆组,杆4和滑块5组成的RRP II级杆组。机构分解图如下:
图二 图一 图三 三.各基本杆组的运动分析数学模型 图一为一级杆组, ? c o s l A B x B =, ? sin lAB y B = 图二为RPR II 杆组, C B C B j j B E j B E y y B x x A A B S l C E y x S l C E x x -=-==-+=-+=0000 )/a r c t a n (s i n )(c o s )(?? ? 由此可求得E 点坐标,进而求得F 点坐标。 图三为RRP II 级杆组, B i i E F i E F y H H A l E F A l E F y y l E F x x --==+=+=111)/a r c s i n (s i n c o s ??? 对其求一阶导数为速度,求二阶导数为加速度。
lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0; yC=-350; A0=xB-xC; B0=yB-yC; S=sqrt(A0.^2+B0.^2); zj=atan(B0/A0); xE=xB+(lCE-S)*cos(zj); yE=yB+(lCE-S)*sin(zj); a=0:0.0001:20/255; Xe=subs(xE,t,a); Ye=subs(yE,t,a); A1=H-H1-yB; zi=asin(A1/lEF); xF=xE+lEF*cos(zi); vF=diff(xF,t); aF=diff(xF,t,2); m=0:0.001:120/255; xF=subs(xF,t,m); vF=subs(vF,t,m); aF=subs(aF,t,m); plot(m,xF) title('位移随时间变化图像') xlabel('t(s)'),ylabel(' x') lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0;
机械原理大作业一 课程名称:机械原理 设计题目:连杆机构及其分析 院系:机械设计制造及其自动化 班级:1208104 完成者:郑鹏伟 学号:1120810416 指导教师:林琳刘福利 设计时间:2014.6.3 哈尔滨工业大学
一.运动分析题目 如图 1-14 所示的矿石破碎机,已知各构件尺寸为: A B B C C D B E E F l 100m m ,l 460m m ,l 250m m , l 460m m ,l m,======D D G G x 300m m ,y 500m m ,x 430m m ,y 210m m ,3 δ== = ==试求构件5的角位移、角 速度、和角加速度。 二.机构结构分析、组成机构的基本杆组划分 1.计算机构的自由度 L H F 3n 2p p 35271=?-?-=?-?= 2.建立直角坐标系 以D 为原点建立直角坐标系 :D(0,0) ,A(-300,500),G(-730,210) 3.对机构进行结构分析: 该机构由一个RR 杆组(原动件AB )和三个RRR 杆组(BCD 、BEC 、EFG )组成,各基本杆组运动分析数学模型见下图:
三.计算编程(VB ): Private f1(3600) As Double '1杆的转角 Private xB(3600) As Double 'B 点的 x 位移 Private yB(3600) As Double 'B 点的 y 位移 Private vxB(3600) As Double 'B 点的 x 速度 Private vyB(3600) As Double 'B 点的 y 速度 Private axB(3600) As Double 'B 点的 x 加速度 Private ayB(3600) As Double 'B 点的 y 加速度 Private xC(3600) As Double 'C 点的 x 位移 Private yC(3600) As Double 'C 点的 y 位移 Private vxC(3600) As Double 'C 点的 x 速度 Private vyC(3600) As Double 'C 点的 y 速度 Private axC(3600) As Double 'C 点的 x 加速度 Private ayC(3600) As Double 'C 点的 y 加速度 Private xE(3600) As Double 'E 点的 x 位移
机械系统设计 课程作业(打孔机的设计)
一、设计任务书 (1) 二、确定总共能(黑箱) (2) 三、确定工艺原理 (3) (一)机构的工作原理: (3) (二)原动机的选择原理 (3) (三)传动机构的选择和工作原理 (3) 四、工艺路线图 (4) 五、功能分解(功能树) (4) 六、确定每种功能方案,形态学矩阵 (5) 七、系统边界 (6) 八、方案评价 (6) 九、画出方案简图 (7) 十、总体布局图 (9) 十一、主要参数确定 (10) 十二、循环图 (14)
一、设计任务书 表1
二、确定总共能(黑箱) (一)机构的工作原理: 该系统由电机驱动,通过变速传动将电机的1450r/min降到主轴的2r/min,与传动轴相连的各机构控制送料,定位,和进刀等工艺动作,最后由凸轮机通过齿轮传动带动齿条上下平稳地运动,这样动力头也就能带动刀具平稳地上下移动从而保证了较高的加工质量。 (二)原动机的选择原理 (1)原动机的分类 原动机的种类按其输入能量的不同可以分为两类: A.一次原动机 此类原动机是把自然界的能源直接转变为机械能,称为一次原动机。属于此类原动机的有柴油机,汽油机,汽轮机和燃汽机等。 B.二次原动机 此类原动机是将发电机等能机所产生的各种形态的能量转变为机械能,称为二次原动机。属于此类原动机的有电动机,液压马达,气压马达,汽缸和液压缸等。 (2)选择原动机时需考虑的因素: 1:考虑现场能源的供应情况。 2:考虑原动机的机械特性和工作制度与工作相匹配。 3:考虑工作机对原动机提出的启动,过载,运转平稳等方面的要求。 4:考虑工作环境的影响。
机械原理大作业 课程名称:机械原理 设计题目:连杆机构运动分析 院系:机械工程院 班级: xxxx 学号: xxxxx 设计者: xx 设计时间:2016年6月
一、题目 1-12:所示的六连杆机构中,各构件尺寸分别为:lAB =200mm,lBC=500mm,lCD=800mm,xF=400mm,xD=350mm,yD=350mm,w1=100rad/s,求构件5上的F点的位移、速度和加速度。 二、数学模型 1.建立直角坐标系 以F点为直角坐标系的原点建立直角坐标系X-Y,如下图所示。
2.机构结构分析 该机构由I级杆组RR(原动件AB)、II级杆组RRR(杆2、3)、II级杆组PRP (杆5、滑块4)组成。 3.各基本杆组运动分析 1.I级杆组RR(原动件AB) 已知原动件AB的转角
φ=0-2Π 原动件AB的角速度 w=10rad/s 原动件AB的角加速度 α=0 运动副A的位置 xA=-400,yA=0 运动副A的速度 vA=0,vA=0 运动副A的加速度 aA=0,aA=0 可得: xB=xA+lAB*cos(φ) yB=yA+lAB*sin(φ) 速度和加速度分析: vxB=vxA-wl*AB*sin(Φ) vyB=vyA+w*lAB*sin(φ) axB=axA-w2*lAB*cos(φ)-e*lAB*sin(φ) ayB=ayA-w2*lAB*sin(φ)+e*lAB*cos(φ)
2.II级杆组RRR(杆2、3) 杆2的角位置、角速度、角加速度 lBC=500mm,lCD=800mm,xD=350mm,yD=350mm, ψ2=arctan﹛[Bo+﹙Ao2+Bo2-Co2﹚?]/﹙Ao+Bo﹚﹜ ψ3=arctan[﹙yC-yD)/(xC-xD)] Ao=2*LBC(xD-xB) Bo=2*LBC(yD-yB) lBD2=(xD-xB)2+(yD-yB)2 Co=lBC2+lBD2-lCD2 xC=xB+lBC*cos(ψ2) yC=xB+lBC*sin(ψ2) 求导可得C点的角速度和角加速度。