单目视觉智能车路径识别及控制策略研究*
陈启迅 薛 静
(西北工业大学自动化学院 西安710072
)摘 要 研究了基于CMOS摄像头的图像采集方法,以及智能车赛道路径识别。提出了自适应差分边缘检测算法,采用取点求面积的方法提取指引线的相关参数。自适应差分边缘检测算法是在一般的边缘检测算法的基础上提出的,它能根据提取的左右边缘存在情况调整搜索范围、阈值,以及差值的求取方法。使用海伦公式求指引线上所取的三角形的面积,
据此提出了1种基于三角形面积的智能车速度控制方法,此方法以指引线上的三角形面积反映赛道的弯曲程度,并以此作为智能车速度控制的控制变量。
关键词 自适应差分边缘检测;智能车;图像采集;海伦公式
中图分类号:TP301.6 文献标志码:A doi:10.3963/j
.issn 1674-4861.2012.05.006收稿日期:2012-07-04 修回日期:2012-09-
07 *西北工业大学研究生创业种子基金项目(
批准号:Z2011047)资助第一作者简介:陈启迅(1984),硕士生.研究方向:控制工程、系统工程.E-mail:cq
x062014@126.com0 引 言
智能车辆系统是1个拥有感知环境能力,具备规划决策能力以实现自动行驶,并且可以实现多等
级辅助驾驶等功能于一体的综合系统[
1
]。与很多学科有着密切关系,如计算机、控制、通信、图像处
理、人工智能、信号处理等,同时也是多种传感器融
合的载体。因为它一般集中了摄像机、GPS、超声波雷达、激光雷达等多种传感器来感知周围环境,
并根据多传感器融合所获得的道路、车辆状态和障碍物信息进行控制车辆的转向和速度,从而使得车辆安全、可靠、稳定地在道路上行驶,因此智能车辆
是多学科综合于一体的高度智能化的产物[
2-
3]。文献[4]
中介绍了一般差分边缘检测算法。文献[5
]中描述了基于序列图像运动分割的车辆边界轮廓提取算法。文献[6]中提到了道路裂纹线检测中的脊波域图像增强算法。选用功耗低、前瞻性好的CMOS摄像头作为路径识别视觉传感器,采用自适应差分边缘检测算法有效地提取道路指引线,此算法具有很高的灵活性和适应能
力,
能够有效地降低干扰。进一步使用取点求面积的方法获取指引线参数。
1 视觉图像采集
1.1 硬件实现
CMOS视觉传感器图像采集电路[7]
见图1
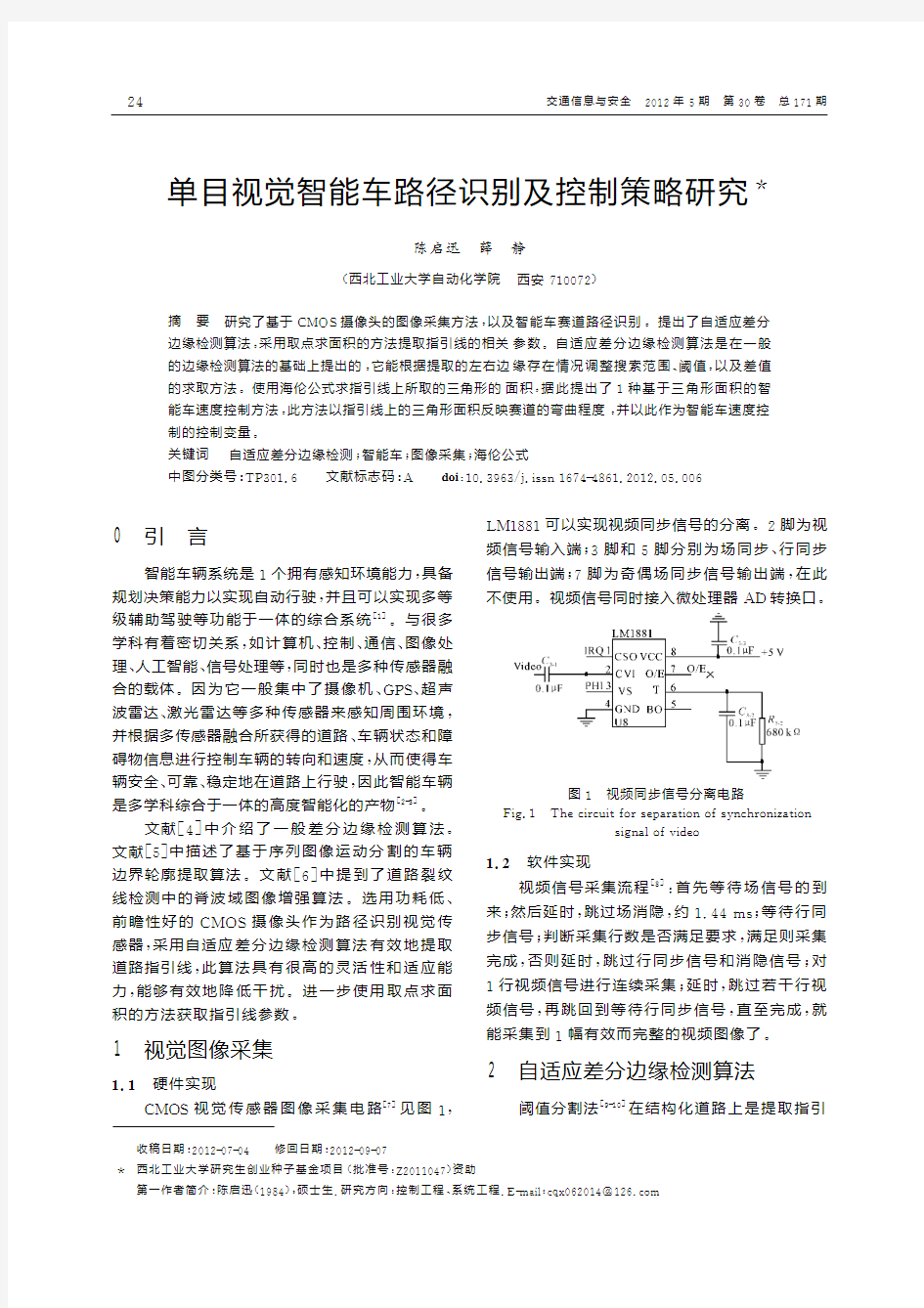
,LM1881可以实现视频同步信号的分离。2脚为视
频信号输入端;3脚和5脚分别为场同步、行同步信号输出端;7脚为奇偶场同步信号输出端,在此不使用。视频信号同时接入微处理器AD转换口
。
图1 视频同步信号分离电路
Fig.1 The circuit for separation of sy
nchronizationsig
nal of video1.2 软件实现
视频信号采集流程[8]
:首先等待场信号的到
来;然后延时,跳过场消隐,约1.44ms;等待行同步信号;判断采集行数是否满足要求,满足则采集完成,否则延时,跳过行同步信号和消隐信号;对1行视频信号进行连续采集;
延时,跳过若干行视频信号,再跳回到等待行同步信号,直至完成,就能采集到1幅有效而完整的视频图像了。
2 自适应差分边缘检测算法
阈值分割法[9-
10]在结构化道路上是提取指引
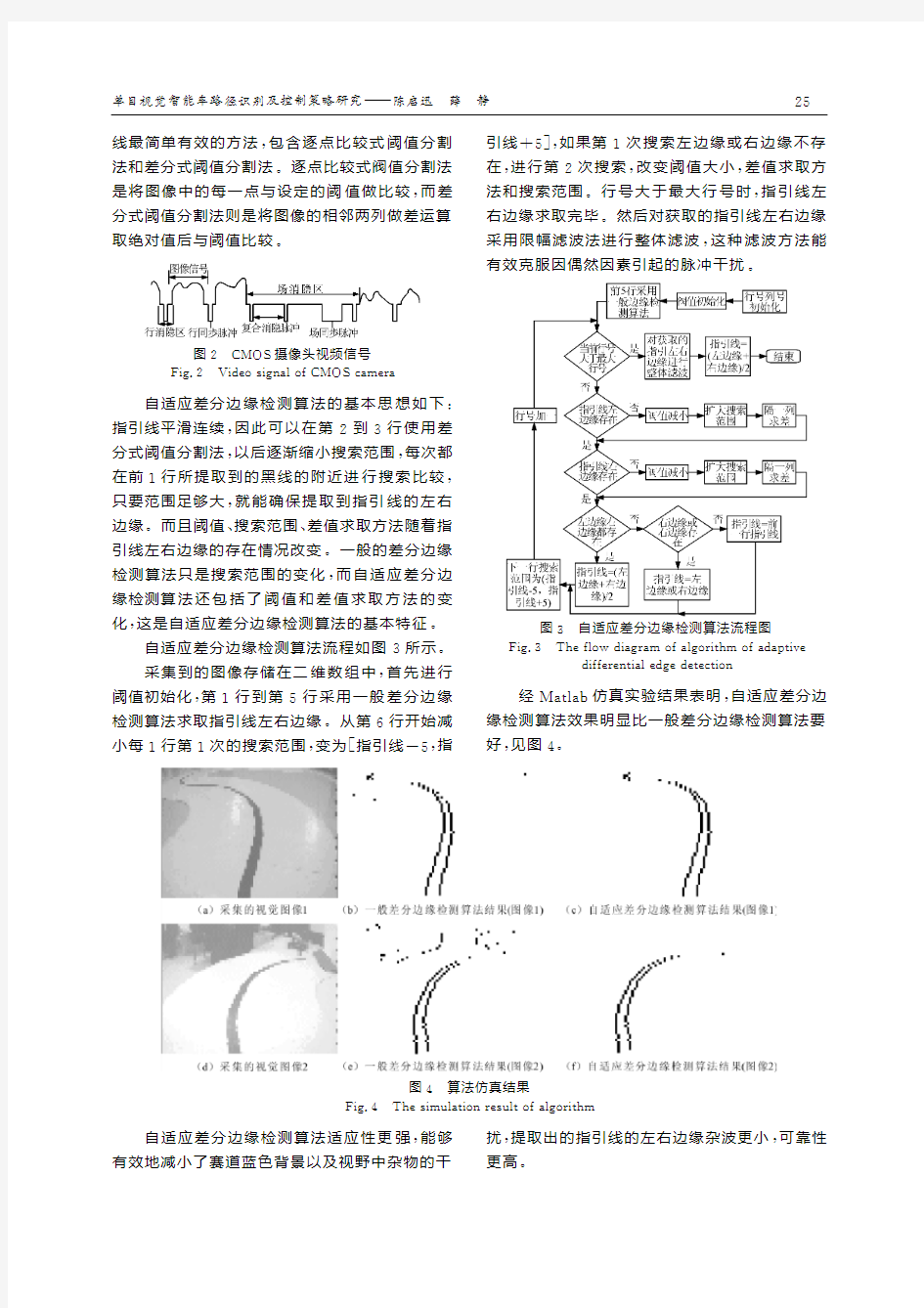
4
2交通信息与安全 2012年5期 第30卷 总171期
技术细节 本项目应用了嵌入式中央控制及工业级图像高速传输控制技术,基于CCD/CMOS与DSP/FPGA的图像识别与处理技术,成功建立了光电检测系统。应用模糊控制的精选参数自整定技术,使系统具有对精确检测的自适应调整,实现产品的自动分选功能。 图1 控制系统流程图 光电检测系统主要通过检测被检物的一些特征参数(灰度分布,RGB分值等),从而将缺陷信息从物体中准确地识别出来,通过后续的系统进行下一步操作,主要分为以下几部分 CCD/CMOS图像采集部分 系统图像数据采集处理板中光信号检测元件CCD/CMOS采用进口的适合于高精度检测的动态分析单路输出型、保证实际数据输出速率为320MB/s的面阵CCD/CMOS。像素分别为4000*3000和1600*1200,帧率达到10FPS。使用CCD/CMOS 作为输入图像传感器,从而实现了图像信息从空间域到时间域的变换。为了保证所需的检测精度,需要确定合理的分辨率。根据被检测产品的大小,初步确定系统设计分辨率为像素为0.2mm。将CCD/CMOS接收的光强信号转换成电压幅值,再经过A/D转换后由DSP/ FPGA芯片进行信号采集,即视频信号的量化处理过程,图像采集处理过程如图所示:
图2 图像采集处理过程 数据处理部分 在自动检测中,是利用基于分割的图像匹配算法来进行图像的配对为基础的。图像分割的任务是将图像分解成互不相交的一些区域,每一个区域都满足特定区域的一致性,且是连通的,不同的区域有某种显著的差异性。分割后根据每个区域的特征来进行图像匹配,基于特征的匹配方法一般分为四个步骤:特征检测、建立特征描述、特征匹配、利用匹配的“特征对”求取图像配准模型参数。 算法基本步骤如下: 1)利用图像的色彩、灰度、边缘、纹理等信息对异源图像分别进行分割,提取区域特征; 2)进行搜索匹配,在每一匹配位置将实时图与基准图的分割结果进行融合,得到综合分割结果; 3)利用分割相似度描述或最小新增边缘准则找出正确匹配位置。 设实时图像分割为m个区域,用符号{A1,A2,… Am}表示,其异源基准图像分割为n个区域,用符号{B1,B2,…Bn}表示。分割结果融合方法如下: 在每一个匹配位置,即假设的图像点对应关系成立时,图像点既位于实时图中,又位于其异源基准图像中,则融合后区域点的标识记为:(A1B1,A1B2,…,A2B1,A2B2,…)。标识AiBj表示该点在实时图中位于区域i,在基准图中位于区域j。算法匹配过程如下图所示:
智能小车的路径识别问题 摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。 关键词:智能小车;路径识别;面阵CCD摄像器件 Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool. Key words:smart car; Path recognition; Surface array CCD camera device 0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车 行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。实现该 功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动 模块组成。路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块 组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个 方面进行相应的分析和介绍。 1 光电传感器 1.1 反射式红外发射接收器 半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。不同颜色的物体对光的反射率不同,当发射出的红外光对准黑色物体时,反射的红外线很少,光电二极管不能导通,反之,当对准白色物体时,光电二极管导通[2]。系统的单片机接收到光电二极管的信息根据相应的算法分析出小车此时的位置及位置偏离度,进而控制小车的方向和速度。 光电式传感器是通过对光的测量通过光电元件转化为电信号,并输出有效的输出量,由于外界光电因素的原因导致空间分辨率低是每个红外传感器存在的缺点,因此必须对原始传感器信息进行预处理,取相对值是一种有效解决外界干扰的方法,即将传感器未发射红外线时的A/D转换值进行提取,再与红外线时的转换值取相对值。文献[2]同时也提出了如何根据每个传感器的相对值与传感器位置推断出车模相对于黑色引导线的横向偏移位置。而文献[3]中所描述的方法与文献[2]有异曲同工之妙,文献[4][5]也对光电传感器的路径算法有详细科学的介绍。 1.2光敏电阻阵列传感器 假设光敏电阻阵列布置如图1所示,在智能小车的正前方布置n个光敏电阻( n=1,2,…, 11 ) ,在其质心位置依次紧密排列m个光敏电阻(m=1,2…7),首先测出路径黑色区域和白色区域的光敏电阻值,以通过d点的中心线的交点为原点建立坐标系,两排光敏之间的距离为K,光敏n和n+1且n>6或者(n和n-1且n<6)所测的值分别为黑色区域值和白色区域值,光敏6中心为智能小车的中心线通过点,而光敏d也为其通过点,连接这两点即为智能小车的中心线,则通过小车中心线并与黑色区域光敏值对应的光敏n与光敏m的连线即为所求路径信息。理论上讲,只要有两点就可以确定唯一的直线。
视觉导航智能车辆的目标识别精确性与实时性研究 1)概述 2)视觉路径导航原理 3)识别精确性研究(提高精确性的意义和方法:滤波、自适应阈值等) 4)实时性研究(软硬件方面;软件方面:优化算法、其他处理方法(减小图像处理区域等)) 5)总结 1.概述 智能车辆技术 智能车辆(IntelligentVehicle)又称轮式移动机器人,是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。它致力于提高汽车的安全性、舒适性和提供优良的人车交互界面,是目前各国重点发展的智能交通系统一个重要组成部分,也是世界车辆工程领域研究的热点和汽车工业增长的新动力。 智能车辆概述 智能车辆的研究意义 随着经济和社会的迅速发展,交通基础设施的瓶颈制约作用越来越明显。这种制约不仅体现在交通堵塞问题日益突出上,同时还体现在由于交通不畅而造成的环境污染问题及相对落后的道路和先进的车辆对人们的生命、财产所形成的安全隐患。正因为如此,智能交通系统(IntelligentTransportationSystems,ITS)日益受到欧洲、日本、美国等发达国家的重视并成为研究热点。他们相继启动了各种以智能交通系统为目标的研究与开发项目。如欧洲的PROMETHEUS和DRIVE项目,日本的VICS和ARTS项目,美国的IVHS项目等。各国家各地区研究的项目内容,对智能交通系统的定义不尽相同,各项目的重点也有所不同,但目标都是综合利用新的信息技术、计算机技术、自动化技术、管理技术等,来提高道路和车辆的利用效率,提高安全性,减少污染及阻塞的发生。
ITS一般由两部分组成,即智能道路及交通控制系统和智能车辆系统IVS(IntelligentVehicleSystem)。目前智能道路系统的构筑还处于起步阶段,相应的基础设施建设周期长且投资大,所以发展智能车辆及车辆自主行驶系统,通过提高车辆自身智能的方案是目前实现安全、高效的自主行驶的最佳选择,同时它还可为开发将来在完备的自动高速网络环境中运行的智能车辆奠定基础。 智能车辆作为智能车辆系统的基本组成单元,可以集成如视觉技术、触觉技术、自主控制和决策技术、多智能体技术、智能控制技术、多传感器集成和融合技术等许多最新的智能技术,从而能够完成很多高智能工作。我国也已经把智能车辆列入国家高新技术计划,足以证明政府有关部门对发展智能车辆的高度重视。 智能车辆的应用范围 由于智能车辆具有环境感知、规划决策、自动驾驶等功能,目前已经在以下场合得到了广泛应用。 1.智能交通系统 为解决交通问题,各发达国家在ITS的研究上均投入了大量的人力、物力。自然而然,智能车辆就成为ITS的一个重要的组成部分,得到越来越多的重视。 2.柔性制造系统和柔性装配系统 在计算机集成制造系统中,智能车辆用来运输工件,能够极大的提高生产效率,降低生产成本。 3.军事领域 智能车辆的研究也受到了军方的关注。以智能车辆作为其它智能武器的安装平台,能够实现全天候的自动搜索、攻击动静态目标,能够极大的提高在高新技术战争中的攻击力,减少人员伤亡。 4.应用于其它特殊环境 智能车辆在有毒或放射性环境下运输,还可应用于野外探险、消防、救灾等。 智能车辆的研究状况 1.国外研究概况 国外对于智能车辆技术的研究始于20世纪70年代末,最初是军方用做特殊用途的,80年代得到了更深入的研究。进入90年代后,由于与智能交通系统的结合,
人工智能的模式识别与机器视觉 模式识别 “模式”(Panern)一词的本意是括完整天缺的供模仿的标本或标识。模式识别就是识别出给定物体所模仿的标本或标识。计算机模式识别系统使一个计算机系统具有模拟人类通过感官接受外界信息、识别和理解周围环境的感知能力。 模式识别是一个不断发展的学科分支,它的理论基础和研究范围也在不断发展。在二维的文字、图形和图像的识别方而,已取得许多成果。三维景物和活动目标的识别和分析是目前研究的热点。语音的识别和合成技术也有很大的发展。基于人工神经网络的模式识别技术在手写字符的识别、汽车牌照的识别、指纹识别、语音识别等方面已经有许多成功的应用。模式识别技术是智能计算机和智能机器人研究的十分重要的基础 机器视觉 实验表明,人类接受外界信息的80%以上来自视觉,10%左右来自听觉,其余来自嗅觉、味觉及触觉。在机器视觉方面,只要给计算机系统装上电视摄像输入装置就可以“看见”周围的东西。但是,视觉是一种感知,机器视觉的感知过程包含一系列的处理过程,例如,一个可见的景物由传感器编码输入,表示成一个灰度数值矩阵;图像的灰度数值由图像检测器进行处理,检测器检测出图像的主要成分,如组成景物的线段、简单曲线和角度等;这些成分又校处理,以便根据景物的表面特征和形状特征来推断有关景物的特征信息;最终目标是利用某个适当的模型来表示该景物。 视觉感知问题的要点是形成一个精练的表示来取代极其庞大的未经加工的输入情息,把庞大的视觉输人信息转化为一种易于处理和有感知意义的描述。 机器视觉可分为低层视觉和高后视觉两个层次,低层视觉主要是对视觉团像执行预处理,例如,边缘检测、运动目标检测、纹理分析等,另外还有立体造型、曲面色彩等,其目的是使对象凸现出来,这时还谈不上对它的理解。高层视觉主要是理解对象,显然,实现高层视觉需要掌捏与对象相关的知识。 机器视觉的前沿研究课题包括:实时图像的并行处理,实时图像的压缩、传输与复原,三绍景物的建模识别,动态和时变视觉等。 人娄的钉能活动过程主要是一个获得知识并运用知识的过程,知识是智能的基础。为了使计算机具有钉能,能模拟人类的智能行为,就必须使它具有知识。把人类拥有的知识采用适当的模式表示出来以便存储到计算机中,这就是知识表示要解决的问题。知识表示是对知识的一种描述,或者说是一组约定,是一种计算机可以接受的用于描述知识的数据结构,对知识进行表木就是把知识表示咸便于计算机存储和利用的菜种数据结构。知识表示方法给出的知识表示形式称为知识表示程式,知识表示模式分为外部表示模式和内部表示模式两个层次。知识外部表示模式是与软件开发的工具、运行的软件平台无关的知识表示的形式化描述。知
机器视觉检测 一、概念 视觉检测是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉检测的特点是提高生产的柔性和自动化程度。 2、典型结构 五大块:照明、镜头、相机、图像采集卡、软件 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。目前没有通用的照明设备,具体应用场景选择相应的照明装置。照射方法可分为: 分类具体说明优点 背向照明被测物放在光源和摄像机之 间能获得高对比度的图像 前向照明光源和摄像机位于被测物的 同侧 便于安装 结构光将光栅或线光源等投射到被 测物上,根据它们产生的畸 变,解调出被测物的三维信 息 频闪光照明将高频率的光脉冲照射到物
体上,摄像机拍摄要求与光 源同步 2.镜头 镜头的选择应注意以下几点:焦距、目标高度、影像高度、放大倍数、影响至目标的距离、中心点/节点、畸变。 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。 要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD 和面阵CCD;单色相机和彩色相机。 为优化捕捉到的图像,需要对光圈、对比度和快门速度进行调整。 4.图像采集卡 图像采集卡是图像采集部分和图像处理部分的接口。将图像信号采集到电脑中,以数据文件的形式保存在硬盘上。通过它,可以把摄像机拍摄的视频信号从摄像带上转存到计算机中。 5.软件 视觉检测系统使用软件处理图像。软件采用算法工具帮助分析图像。视觉检测解决方案使用此类工具组合来完成所需要的检测。是视觉检测的核心部分,最终形成缺陷的判断并能向后续执行机构发出指令。常用的包括,搜索工具,边界工具,特征分析工具,过程工具,视觉打印工具等。 3、关键——光源的选择 1.光源选型基本要素: 对比度机器视觉应用的照明的最重要的任务就是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易于特
图像处理在智能车路径识别中的应用 摘要 机器视觉技术在智能车中得到了广泛的应用,这项技术在智能车的路径识别、障碍物判断中起着重要作用。基于此,依据飞思卡尔小车的硬件架构,研究机器视觉技术应用于飞思卡尔小车。飞思卡尔智能车处理器采用了MC9S12XS128芯片,路况采集使用的是数字摄像头OV7620。 由于飞思卡尔智能车是是一款竞速小车,因此图像采集和处理要协调准确性和快速性,需要找到其中的最优控制。因此本设计主要需要完成的任务是:怎样用摄像头准确的采集每一场的图像,然后怎样进行二值化处理;以及怎样对图像进行去噪处理;最后也就是本设计的难点也是设计的核心,怎样对小车的轨迹进行补线。 本设计的先进性,在众多的图像处理技术中找到了适合飞思卡尔智能车的图像处理方法。充分发挥了摄像头的有点。经过小车的实际测试以及相关的MATLAB 仿真,最终相关设计内容都基本满足要求。小车的稳定性和快速性得到显著提高。 关键词:OV7620,视频采集,图像处理,二值化
The Application of Image Processing in the Recognition of Intelligent Vehicle Path ABSTRACT CameraMachine vision technology in the smart car in a wide range of applications, the technology identified in the path of the smart car, and plays an important role in the obstacles to judge. Based on this, based on the architecture of the Freescale car, machine vision technology used in the Freescale car. Freescale smart car the processor MC9S12XS128 chip traffic collected using a digital camera OV7620. Freescale's Smart car is a racing car, so the image acquisition and processing to coordinate the accuracy and fast, you need to find the optimal control. This design need to complete the task: how to use the camera to accurately capture every image, and then how to binarization processing; and how to image denoising; last is the difficulty of this design is the design of the core, how to fill line on the trajectory of the car. The advanced nature of the design found in many image processing techniques of image processing methods for Freescale Smart Car. Give full play to the camera a bit. The actual testing of the car and MATLAB simulation, the final design content can basically meet the requirements. The car's stability and fast to get improved significantly. KEY WORDS:OV7620,Video Capture,PictureProcessing,Binarization
基于摄像头的道路识别及赛车控制算法 杨运海周祺吕梁 摘要:本文探讨了摄像头在智能车道路识别中的应用,并提出了一种通用的控制算法。在准确采集图像的基础上,利用临近搜索法对有效道路信息进行快速提取,通过分析赛道信息,计算出赛道黑线的走向趋势及赛车当前位置。在充分考虑当前和过去的赛道信息的基础上,对赛道类型进行判断及分类。在综合考虑赛道类型,黑线走向及车当前位置,对舵机的转向和电机的速度进行精确控制。 关键词:图像采集;临近搜索;转向控制,速度控制 1.概述 在飞思卡尔智能车汽车比赛中,路径识别方法主要有两大类,一类是基于红外光电传感器,令一类是基于摄像头。通常,红外光电传感器安装灵活,原理简单,可靠性好,不易受环境光干扰,因而得到了广泛应用,但其对前方道路的预判距离非常有限,不适宜赛车高速行驶。另一类是基于摄像头,与光电传感器相比,其优点非常明显,能提前获取大量前方道路信息,有利于实现赛车的最优控制。但其缺点是图像采集要求有高的AD转换频率,图像处理算法复杂度高,且容易受环境光的干扰。考虑到摄像头的优点远大于其缺点,因此选择了摄像头。以下是摄像头的工作流程图: 图B-1 摄像头工作流程
摄像头控制赛车行驶方案有三大模块:图像采集、赛道信息提取、转向和速度控制。 2.图像采集 考虑到S12的运算能力,我们采用了黑白制式、320*240的CMOS单板摄像头。摄像头出来的是模拟信号,每秒有50场图像,场之间有场消隐信号,行之间有行消隐信号,经过lm1881分离后,可得到场同步信号和行同步信号,作为行中断信号。由于行中断中要采集该行的信号,对时间要求很严格,其中断优先级应比普通中断的优先级高,因此我们选择IRQ作为行同步信号输入口,PT0作为场信号输入口。此外,为保证图像不丢失,我们仅对场信号的下降沿进行捕捉。 图B-2 摄像头视频信号 按照目前车的刹车时的加速度,我们选定图像拍摄最远处为前方1米就足以对速度做出了控制。考虑到前轮到前方20cm为摄像头的盲区,故有效拍摄范围为0.8m,为了保证不丢失起跑线,每2.5cm至少拍摄一行,故一幅图像至少采集32行。为了稳妥起见,我们选择了ROW=45行。摄像头最前方拍摄的宽度为80cm,而黑线宽度为2.5cm,故一行至少采集32,为了稳妥起见,一行采集的点数定为COL=45个点。 正常情况下,S12的AD频率不能超过2M,转化一个点需要14个周期,如果不超频,一行将只能采集8个点(24M主频时)。将分频系数设为0,此时AD 频率为12M。在行采集过程中,我们通过查询方式来判断AD是否转换完成,并对AD转换时间进行了记录,发现记录到的时间恰是期间指令执行一次的时间,这表明,影响一行采集的点数已不是AD的频率,而是执行指令的时间,因此采集过程中不需要查询A TDSTA T0的标志位,只需要通过执行一定数量的NOP空操作指令延时即可。例如采集47个点需要时,每个点的时间间隔是53us/47=1.125us,对应的指令周期数为1.125*24=27。通过反编译知读写等指令本身有13个指令周期,故令加14个NOP指令即可实现。 由于摄像头的角度关系,拍摄是不均匀的,而是前方疏,近处密。为了保证采集的均匀,采集的行之间间隔的行数就不能相同。摄像头的有效行数为285行左右,具体关系如下表: 行采集计数器line 摄像头行计数器row 备注 0 0 每3行采集一行
机器视觉概念/研究现状/应用/检测 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 1、机器视觉 1.1机器视觉的概念 机器视觉被定义为用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。一个典型的工业机器视觉应用系统包括光源、光学系统、图像采集系统、数字图像处理与智能判断决策模块和机械控制执行模块。系统首先通过CCD相机或其它图像拍摄装置将目标转换成图像信号,然后转变成数字化信号传送给专用的图像处理系统,根据像素分布!亮度和颜色等信息,进行各种运算来抽取目标的特征,根据预设的容许度和其他条件输出判断结果。 值得一提的是,广义的机器视觉的概念与计算机视觉没有多大区别,泛指使用计算机和数字图像处理技术达到对客观事物图像的识别、理解。而工业应用中的机器视觉概念与普通计算机视觉、模式识别、数字图像处理有着明显区别,其特点是: 1、机器视觉是一项综合技术,其中包括数字图像处理技术、机械工程技术、控制技术、电光源照明技术,光学成像技术、传感器技术、模拟与数字视频技术、计算机软硬件技术、人机接口技术等。这些技术在机器视觉中是并列关系。相互协调应用才能构成一个成功的工业机器视觉应用系统。 2、机器视觉更强调实用性,要求能够适应工业生产中恶劣的环境,要有合理的性价比,
要有通用的工业接口,能够由普通工作者来操作,有较高的容错能力和安全性,不会破坏工业产品,必须有较强的通用性和可移植性。 3、对机器视觉工程师来说,不仅要具有研究数学理论和编制计算机软件的能力,更需要光、机、电一体化的综合能力。 4、机器视觉更强调实时性,要求高速度和高精度,因而计算机视觉和数字图像处理中的许多技术目前还难以应用于机器视觉,它们的发展速度远远超过其在工业生产中的实际应用速度。 1.2机器视觉的研究范畴 从应用的层面看,机器视觉研究包括工件的自动检测与识别、产品质量的自动检测、食品的自动分类、智能车的自主导航与辅助驾驶、签字的自动验证、目标跟踪与制导、交通流的监测、关键地域的保安监视等等。从处理过程看,机器视觉分为低层视觉和高层视觉两阶段。低层视觉包括边缘检测、特征提取、图像分割等,高层视觉包括特征匹配、三维建模、形状分析与识别、景物分析与理解等。从方法层面看,有被动视觉与主动视觉之,又有基于特征的方法与基于模型的方法之分。从总体上来看,也称作计算机视觉。可以说,计算机视觉侧重于学术研究方面,而机器视觉则侧重于应用方面。 机器人视觉是机器视觉研究的一个重要方向,它的任务是为机器人建立视觉系统,使得机器人能更灵活、更自主地适应所处的环境,以满足诸如航天、军事、工业生产中日益增长的需要(例如,在航天及军事领域对于局部自主性的需要,在柔性生产方式中对于自动定位与装配的需要,在微电子工业中对于显微结构的检测及精密加工的需要等)。机器视觉作为一门工程学科,正如其它工程学科一样,是建立在对基本过程的科学理解之上的。机器视觉系统的设计依赖于具体的问题,必须考虑一系列诸如噪声、照明、遮掩、背景等复杂因素,折中地处理信噪比、分辨率、精度、计算量等关键问题。
基于线性CCD图像识别智能小车的设计与开发 目前,具有自动驾驶功能的智能车越来越引起人们的重视。智能车装备了各种传感器来采集路况信息,通过计算机的控制可以实现自适应巡航,并且又快又稳、安全可靠。智能车不仅能在危险、有毒、有害的环境里工作,而且能通过计算机的控制实现安全驾驶,能大幅度降低车祸的发生率。智能车的设计关键是路况信息的采集,传统的方案多采用红外光电传感器,此方案不仅噪声较大,而且与主控CPU的连接电路复杂,传输速率慢。本文研究的智能小车系统选用了TSL1401CL线性CCD图像采集模块,该模块采用串行通信方式与主控CPU连接,不仅电路简单、性能稳定,而且采集速率快。通过实验测试,本文设计的智能车能根据采集到的图像分析前方路径及障碍而实现智能驾驶,具有极强的实用价值和市场前景。 1 系统设计思想 经过调研与分析,我们采用了MC9S12XS128单片机、TSL1401CL线性CCD图像采集模块、稳压芯片以及液晶OLED等外围器件设计与开发出这套智能小车系统。MC9S12XS128高速单片机为Freescale公司新推出的16位高性能高速单片机,其接口丰富、功耗低、信息处理能力强大,能对小车前方路径及障碍进行及时分析,处理迅速、性能稳定。为了提高路面图像采集的速度与质量,我们选用了TSL1401CL线性CCD图像传感器。TSL1401CL 具有功耗小、性能稳定、灵敏度高、响应速度快等优点,其工作过程是先将路况光学信号转换为模拟电流,模拟电流放大后再进行A/D转换变成数字信号,最后通过串口送至主控CPU。智能小车的CPU根据CCD采集到的信息进行分析和处理,从而实现系统的自动控制与障碍处理、路径探测。在软件设计中我们采用了先进的PID(比例、积分、微分)算法,其运算参数可以根据过程的动态特性及时整定。通过PID算法,模糊PID算法来实现智能车的转向、控速等精确自动控制,另外还有很好的避障功能,实现了全智能的安全控制。 2 系统硬件设计 本项目采用模块化设计与开发,主要有CCD采集模块、电源模块、电机驱动模块、车速
智能车黑线识别算法及控制策略研究 时间:2009-05-1811:23:07来源:电子技术作者:北京信息科技大学,机电工程学院张淑 谦王国权 0引言 “飞思卡尔”杯全国大学生智能车大赛是由摩托罗拉旗下飞思卡尔公司赞助由高等学校自动化专业教学指导委员会负责主办的全国性的赛事,旨在加强大学生的创新意识、团队合作精神和培养学生的创新能力。此项赛事专业知识涉及控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,对学生的知识融合和动手能力的培养,对高等学校控制及汽车电子学科学术水平的提高,具有良好的推动作用。 智能车竞赛所使用的车模是一款带有差速器的后轮驱动模型赛车,它由大赛组委会统一提供。自动控制器是以飞思卡尔16位微控制器MC9S12DGl28(S12)为核心控制单元,配合有传感器、电机、舵机、电池以及相应的驱动电路,它能够自主识别路径,控制车高速稳定运行在跑道上。比赛要求自己设计控制系统及自行确定控制策略,在规定的赛道上以比赛完成的时间短者为优胜者。赛道由白色底板和黑色的指引线组成。根据赛道的特点,比赛组委会确定了两种寻线方案:1.光电传感器。2.摄像头。 两种寻线方案的特点如下: (1)光电传感器方案。通过红外发射管发射红外线光照射跑道,跑道表面与中心指引线具有不同的反射强度,利用红外接收管可以检测到这些信息。此方案简单易行程序调试也简单且成本低廉,但是它受到竞赛规则的一些限制(组委会要求传感器数量不超过16个(红外传感器的每对发射与接收单元计为一个传感器,CCD传感器计为1个传感器)),传感器的数量不可能安放的太多,因而道路检测的精度较低,能得到指引线的信息量也较少。若采用此方案容易引起舵机的回摆走蛇形路线。 (2)摄像头方案。根据赛道的特点斯用黑白图像传感器即可满足要求。CCD摄像头有面阵和线阵两种类型,它们在接口电路、输出信号以及检测信息等方面有着较大的区别,面阵摄像头可以获取前方赛道的图像信息,而线阵CCD只能获取赛道一条直线上的图像信息。摄像头方案的所能探测的道路信息量远大于光电传感器方案,而且摄像头也可以探测足够远的距离以方便控制器对前方道路进行预判。虽然此方案对控制器的要求比较高,但组委会提供的MC9S12DGl28(S12)的运算能力以及自身AD口的采样速度完全能够满足摄像头的视频采样和大量图像数据的处理的要求。 本文就是在摄像头方案的前提下,在实时的图像数据获取的基础上对图像信息进行数据处理,从而提取赛道中心的黑色指引线,再以此来作为舵机和驱动电机的控制依据。 1摄像头采样数据的特点 采用的黑白摄像头的主要工作原理为:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出,见图1。摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该电压信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如O.3V),并保持一段时间。这样相当于紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉
单目视觉智能车路径识别及控制策略研究* 陈启迅 薛 静 (西北工业大学自动化学院 西安710072 )摘 要 研究了基于CMOS摄像头的图像采集方法,以及智能车赛道路径识别。提出了自适应差分边缘检测算法,采用取点求面积的方法提取指引线的相关参数。自适应差分边缘检测算法是在一般的边缘检测算法的基础上提出的,它能根据提取的左右边缘存在情况调整搜索范围、阈值,以及差值的求取方法。使用海伦公式求指引线上所取的三角形的面积, 据此提出了1种基于三角形面积的智能车速度控制方法,此方法以指引线上的三角形面积反映赛道的弯曲程度,并以此作为智能车速度控制的控制变量。 关键词 自适应差分边缘检测;智能车;图像采集;海伦公式 中图分类号:TP301.6 文献标志码:A doi:10.3963/j .issn 1674-4861.2012.05.006收稿日期:2012-07-04 修回日期:2012-09- 07 *西北工业大学研究生创业种子基金项目( 批准号:Z2011047)资助第一作者简介:陈启迅(1984),硕士生.研究方向:控制工程、系统工程.E-mail:cq x062014@126.com0 引 言 智能车辆系统是1个拥有感知环境能力,具备规划决策能力以实现自动行驶,并且可以实现多等 级辅助驾驶等功能于一体的综合系统[ 1 ]。与很多学科有着密切关系,如计算机、控制、通信、图像处 理、人工智能、信号处理等,同时也是多种传感器融 合的载体。因为它一般集中了摄像机、GPS、超声波雷达、激光雷达等多种传感器来感知周围环境, 并根据多传感器融合所获得的道路、车辆状态和障碍物信息进行控制车辆的转向和速度,从而使得车辆安全、可靠、稳定地在道路上行驶,因此智能车辆 是多学科综合于一体的高度智能化的产物[ 2- 3]。文献[4] 中介绍了一般差分边缘检测算法。文献[5 ]中描述了基于序列图像运动分割的车辆边界轮廓提取算法。文献[6]中提到了道路裂纹线检测中的脊波域图像增强算法。选用功耗低、前瞻性好的CMOS摄像头作为路径识别视觉传感器,采用自适应差分边缘检测算法有效地提取道路指引线,此算法具有很高的灵活性和适应能 力, 能够有效地降低干扰。进一步使用取点求面积的方法获取指引线参数。 1 视觉图像采集 1.1 硬件实现 CMOS视觉传感器图像采集电路[7] 见图1 ,LM1881可以实现视频同步信号的分离。2脚为视 频信号输入端;3脚和5脚分别为场同步、行同步信号输出端;7脚为奇偶场同步信号输出端,在此不使用。视频信号同时接入微处理器AD转换口 。 图1 视频同步信号分离电路 Fig.1 The circuit for separation of sy nchronizationsig nal of video1.2 软件实现 视频信号采集流程[8] :首先等待场信号的到 来;然后延时,跳过场消隐,约1.44ms;等待行同步信号;判断采集行数是否满足要求,满足则采集完成,否则延时,跳过行同步信号和消隐信号;对1行视频信号进行连续采集; 延时,跳过若干行视频信号,再跳回到等待行同步信号,直至完成,就能采集到1幅有效而完整的视频图像了。 2 自适应差分边缘检测算法 阈值分割法[9- 10]在结构化道路上是提取指引 4 2交通信息与安全 2012年5期 第30卷 总171期
智能视觉检测系统概述 随着视觉检测技术的不断发展,其应用面也越来越广,视觉检测系统从构成模式上主要分为两大类:基于X86架构的PC系统和基于ARM架构的嵌入式系统。PC系统是比较传统的方式,也是视觉检测系统最早的形式。然而随着视觉技术在不同行业的扩展应用越来越多,应用环境对视觉检测系统的结构模式要求也越来越高。那么在实际项目中到底该选择哪种模式呢?维视图像作为一家致力于视觉技术的高科技企业,在此谈一点自己的看法。 我们知道,一套完整的视觉系统是由三大核心模块构成:前端图像采集、图像处理模块、IO通讯模块。传统的PC系统是把这三部分分别集成,而嵌入式智能相机是把这三部分集成到一个模块中。从技术发展的角度来说,嵌入式智能相机是科技发展的最新成果,具有较好的前沿性。但是在实际应用中,并不一定是新的就能完全把传统的代替掉,我们需要综合考虑实际应用环境,同时还要深入的了解这两者各自的优势和劣势。下面分别从三个主要模块来详细说明。 一、前端图像采集模块 所有基于视觉技术的检测系统,图像采集部分是一切处理结果的基础,图像的质量和稳定性直接影响整套系统的结果。不管是基于PC系统还是嵌入式系统,图像采集部分无非都是由CCD机身、光学镜头、补光光源构成。 其实不管是基于ARM架构的还是基于X86架构的视觉系统,其图像采集部分都是依托于工业镜头、CCD机身、补光光源等。不过由于嵌入式视觉系统为了突出其便携性,整个装置要求设计的比较小巧,所以该系统一般配置的光学成像设备和补光设备都比较单一简单。有时候碰到一些比较特殊的检测需求时,很难依据现场实际环境去自由配置不同的成像装置。
二、图像处理模块 图像处理是整个系统的灵魂,图像处理模块是对采集到的图像的一种解读,把复杂的图像数据处理为机器可认知的数值信号。我们所谓的嵌入式系统和PC系统就是由于这部分程序的载体不同而区分的。我们知道基于ARM的嵌入式系统很难实现复杂的编程设计,那么在选择这两种模式时,首先要了解开发视觉检测程序的几种方式,然后根据实际情况选择合适的开发模式。 一般主要分三类:第一类是从底层开始写算法,以VC、VB等基础开发语言为主,这种方式的自由度非常大,可以根据不同需求分别定制,但是工作量非常大,对开发人员的编程能力和图像处理知识要求较高。
研究背景: 产品表面质量是产品质量的重要组成部分,也是产品商业价值的重要保障。产品表面缺陷检测技术从最初的依靠人工目视检测到现在以 CCD 和数字图像处理技术为代表的计算机视觉检测技术,大致经历了三个阶段,分别是传统检测技术阶段、无损检测技术阶段、计算机视觉检测技术阶段。[] 传统检测技术 (1)人工目视检测法 (2)频闪检测法 无损检测技术 (1)涡流检测法 (2)红外检测法 (3)漏磁检测法 计算机视觉检测技术 (1)激光扫描检测法 (2)CCD 检测法 采用荧光管等照明设备,以一定方向照射到物体表面上,使用CCD摄像机来扫描物体表面,并将获得的图像信号输入计算机,通过图像预处理、缺陷区域的边缘检测、缺陷图像二值化等图像处理后,提取图像中的表面缺陷的相关特征参数,再进行缺陷图像识别,从而判断出是否存在缺陷及缺陷的种类信息等。 优点:实时性好,精确度高,灵活性好,用途易于扩充,非接触式无损检测。 基于机器视觉的缺陷检测系统优点: 集成化生产缩短产品进入市场时间改进生产流程 100%质量保证实时过程监控提高产量精确检测 100%检测 由于经济和技术原因国内绝大多数图像处理技术公司都以代理国外产品为主,没有或者很少涉足拥有自主知识产权的机器视觉在线检测设备,对视觉技术的开发应用停留在比较低端的小系统集成上,对需要进行大数据量的实时在线检测的研究很少也很少有成功案例,但是随着国内经济发展和技术手段不断提高对产品质量检测要求就更高,对在线检测设备的需求也就更大具有巨大的市场潜力。 机器视觉图像处理技术是视觉检测的核心技术 铸件常见缺陷:砂眼气孔缩孔披缝粘砂冷隔掉砂毛刺浇不足缺陷变形 问题的提出: 1.水渍、污迹等不属于铸件缺陷,但由于其外观形貌与缺陷非常类似, 因此易被检测系统误识为缺陷。从目前发表的文献来看,对于伪缺陷的识别率较低。 2.不同种缺陷之间可能存在形状、纹理等方面的相似性,造成缺陷误判。 国外研究发展现状: 20 世纪 90 年代后,基于机器视觉检测系统的自动化功能和实用化水平得到了进一步的提高。 1990 年芬兰Rautaruukki New Technology公司研制了Smartivis表面检测系统[],该系统具有自学习分类功能,应用机器学习方法对决策树结构进行自动设计优化。 1996 年美国Cognex公司研发了一套iLearn自学习分类器软件系统并应用于其研制了iS-2000 自动检测系统。通过这两套系统的无缝衔接,极大地提高了检测系统实时的运算速度,有效的改进了传统自学习分类方法在算法执行速度、数据实时吞吐量、样本训练集规模及模式特征自动选择等方面的不足之处[]。 2004 年Parsytec公司发布了新一代表面质量检测产品Parsytec5i,该系统运用了自学习
红外热成像智能视觉监控系统 “红外热成像智能视觉监控系统”是我司采用国内国际先进厂商监控设备并进行二次开发的“智能监控管理系统”。包括“红外热成像防火图像监控系统”、“嵌入式智能视觉分析安保系统”及“防感应雷系统”三部分。 该系统具有热成像防火检测、防盗入侵检测、非法停车检测、遗弃物检测、物品搬移检测、自动PTZ跟踪、徘徊检测等功能模块,可以很好为场区周界防范提供各种监控管理需求。而且产品具有自学习自适应能力,即使是在各种极端恶劣的环境和照明条件下也可以保持极高的性能——在保持%超高检测率的同时,只有极低的误报率(少于1个/天)。 防火检测: 通过红外热成像防火图像监控系统,工作人员在监控中心可对监控点周边半径1公里至5公里或更大的区域(设置动态轮循状态)进行24小时实时动态系统监控,能在第一时间侦察到地表火情或烟雾,并及时触发联动报警。帮助尽早发现灾情或隐患,及时处理可能突发的火灾及其他异常事件,并且为灾情发生时现场指挥提供依据。 防盗检测: 基于嵌入式智能视觉分析技术的监控跟踪系统,具有入侵检测和自动PTZ跟踪功能模块。支持无人值守、自动检测、报警触发录像、短信自动外发报警等功能。 车辆监控: 支持车容车貌监控、场区路线、远程实时WEB监控、监控录像、视频
存储、回放查询等功能。满足中心或其他相关单位对车辆运输的监控管理。防雷系统: 考虑到野外环境下系统运行的稳定性,防止外界强电压、大电流浪涌串入系统,损坏系统的设备,造成系统不能正常运行,我们将从视频信号、RS485控制信号、网络信号、电源四个方面做好防雷保护措施,以保证系统较好的抗干扰性。 系统拓扑图: 技术说明详解: ◆前端热成像仪技术详述 1)红外成像原理 自然界中一切温度高于绝对零度(-273.16摄氏度)的物体都不断地辐射着红外线,这种现象称为热辐射。红外线是一种人眼不可见的光波,无论白天黑夜,物体都会辐射红外线,但红外线不论强弱,人们都看不到。红外热像仪就是利用红外探测器、光学成像物镜接收被测目标的红外辐射信号(一切物体,只要其温度高于绝对零度,就会有红外辐射),经过红外光学系统红外探测器的光敏源上利用电子扫描电路对被测物的红外热像进行扫描转换成电信号,经放大处理、转换或标准视频信号通过电视屏或监测器显示红外热图像。利用这种原理制成的仪器为红外热成像仪。下图为一个典型的红外热成像系统工作原理图: 红外热成像系统,产生的图像是热图像,这种热像图与物体表面的热分布场相对应,实质上是被测目标物体各部分红外辐射的热像分布图,由于信
第二届全国大学生智能汽车竞赛技术报告 基于CCD视频传感器的智能车路径识别控制系统(下) 4.2电源管理模块设计 电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。模型车系统中接受供电的部分包括:传感器模块、单片机模块、驱动电机模块、转动电机模块以及其它的外围辅助模块等。设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。可靠的电源方案是整个硬件电路稳定可靠运行的基础。 全部硬件电路的电源由7.2V,2A/h的可充电镍镉电池提供。由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。本系统主要用到了以下几个不同的电压,如表4.1所示。 电源模块由若干相互独立的稳压电源电路组成。在本系统中,除了电机驱动模块的电源是直接取自电池外,其余各模块的工作电压都需要经电源管理芯片来实现。 5V电源的实现是通过电源管理芯片TPS7350来实现的。TPS7350是一款低压稳压芯片,能提供5V的固定电压输出。TPS7350低压差稳压芯片克服了早期稳压芯片的缺点,而且还增加了如节电待机模式和供电管理等功能。与其它的稳压芯片一样,TPS7350需要外接一个输出电容来保持输出的稳定性。出于稳定性考虑,需要在稳压输出端和地之间接一个10uF低等效电阻的电容器。除非该等效电阻小于1.2欧姆,否则引入的陶瓷电容或薄膜电容器会使输出的电压不稳定。在很小或根本就没有旁路电容的情况下,输出电容可以减少到4.7uF,所提