
《驾驶行为表征指标及分析方法研究》(吉林大学博士论文)
目录:
1.国内外文献综述
2.驾驶行为信息采集方案
3.驾驶行为表征指标体系构建
4.安全性评估办法
5.驾驶人认知能力评估指标体系及办法
6.典型应用
1.国内外文献综述
研究背景:车越来越多、交通事故多、安全很重要、交通事故的预防亟待解决、国家重视、驾驶人员的错。
研究意义:1.驾驶行为安全性提升提供技术支持(改善驾驶培训质量和教育质量)2.车辆安全性……理论基础3.道路安全性……理论基础4.后续研究……理论基础。
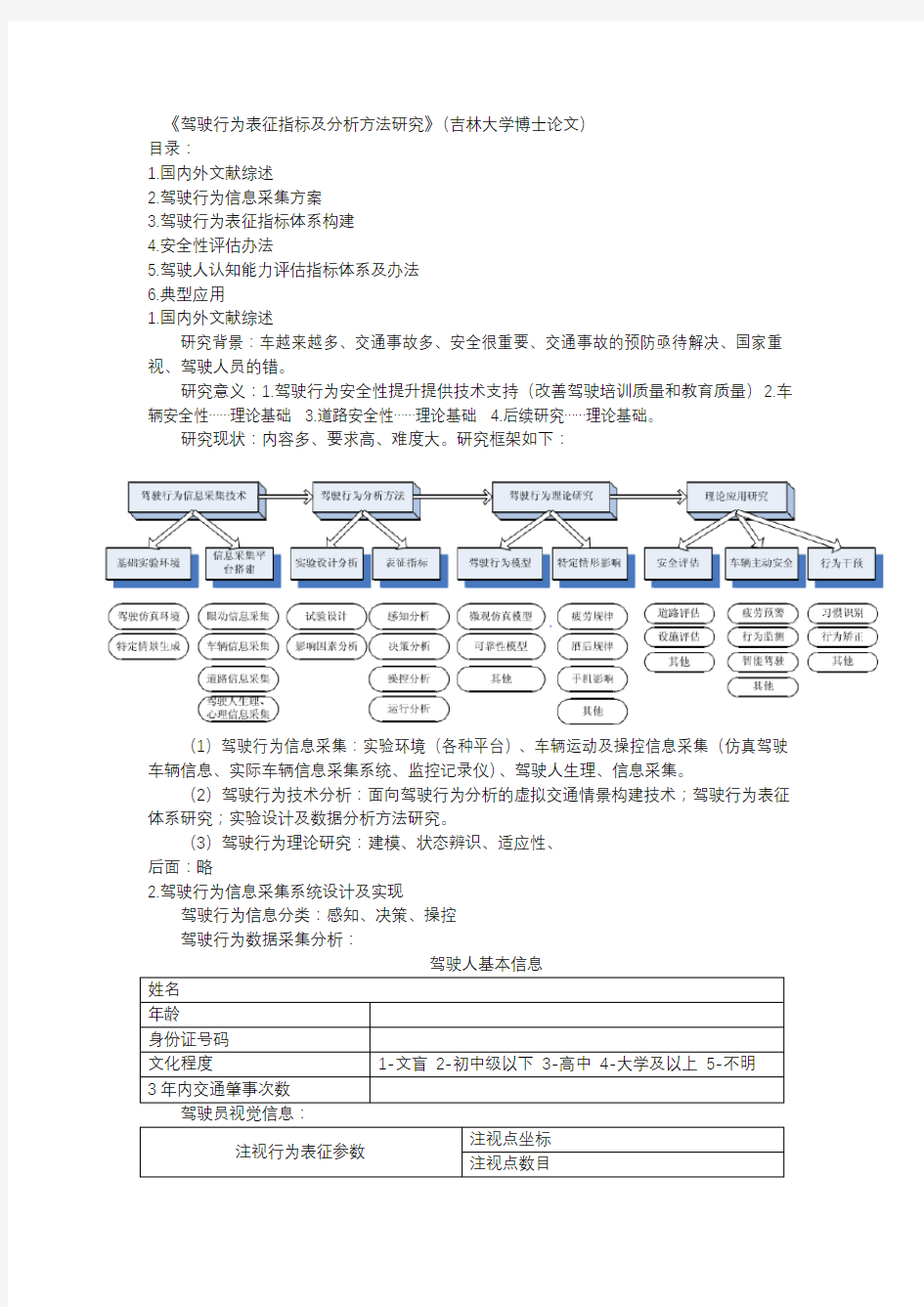
研究现状:内容多、要求高、难度大。研究框架如下:
(1)驾驶行为信息采集:实验环境(各种平台)、车辆运动及操控信息采集(仿真驾驶车辆信息、实际车辆信息采集系统、监控记录仪)、驾驶人生理、信息采集。
(2)驾驶行为技术分析:面向驾驶行为分析的虚拟交通情景构建技术;驾驶行为表征体系研究;实验设计及数据分析方法研究。
(3)驾驶行为理论研究:建模、状态辨识、适应性、
后面:略
2.驾驶行为信息采集系统设计及实现
驾驶行为信息分类:感知、决策、操控
驾驶行为数据采集分析:
姓名
年龄
身份证号码
文化程度1-文盲2-初中级以下3-高中4-大学及以上5-不明
3年内交通肇事次数
注视行为表征参数注视点坐标注视点数目
转向灯状态用于表征转向灯的状态
指标名称单位指标解释
速度公里/小时车辆运行实时测量速度值纵向加速度米/秒平方描述车辆纵向加减速行为横向加速度米/秒平方描述车辆的横向侧倾特征距离信息米描述车辆驶过的距离
2.2.1 驾驶人生理、心理信息采集
(详细介绍了各种仪器)
2.2.2 驾驶人操控及车辆运行信息采集方案及技术实现
软件实现
2.2.3 基于GPS的道路信息采集方案及技术实现
①数据坐标转换
②样本点的识别与分类
③计算模块设计及功能:
采样点坐标输入
↓
计算里程、曲率、删去异常点
↓
判断样本点所属曲线是直线还是曲线
↓
进行曲线(直、圆)拟合,求解相关参数
↓
计算缓和曲线相关参数
↓
计算平曲线一览表相关参数
↓
输出
(并附有详细的函数以及输入输出数据形式)2.3.1 驾驶行为信息同步需求:信息同步的必要性、信息同步需求
2.3.2 信息同步的实现:利用Observer
3.驾驶行为表征指标体系构造
3.1 驾驶人感知行为表征指标
3.1.1 视点分布范围指标
3.1.2 注视区域分布比例指标
(1)注视区域划分:
左前中前右前、左窗仪表右窗、左后中后右后;用矩阵表示(比例)
3.1.3 注视序列指标:注视链、利用Observer
3.2 驾驶决策行为表征指标
3.2.1 驾驶决策行为含义:以“环境信息、本车状态、交通情景”为输入,以“驾驶行为”为输出的一种映射关系
3.2.2 决策行为分析载体(5个场景)
3.2.3 驾驶决策行为表征指标:“决策规则”和“决策反应时间”两个方面
(1)驾驶决策类型及编码:
情景:E 横向:左转-L,右转-R,纵向:维持-N 加速-A,减速-D,维持-K
(2)驾驶决策反应时间
(3)指标采集方法:利用Observer
3.3 驾驶人操控行为表征指标
3.3.1 纵向操控行为表征指标
(1)换档频率:Rate Gear Change = N / T(单位时间内换档次数=指分析时段内换档次数/分析时段的时间长度)
(2)空档滑行比率:Gear Zero Rate = T zero / T(空档滑行时间比率=分析时段内空档时段所占时长/分析时段的时间长度)
3.3.2 横向操控行为表征指标
(1)转向灯使用频率:Light Change Rate=N l / T(单位时间内转向灯使用次数=分析时段内转向灯使用次数/分析时段长度)
(2)转向灯合理性指标:
设T = 转向灯使用次数/变更车道次数。则当转向灯使用次数多于变更车道或转弯次数时,即当T > 1时,则存在变道、转弯意图但未成功执行的情况;反之,说明驾驶人在变道、转弯时存在不使用转向灯的情况。通常情况下T 值会在1 附近波动,当T<1时,则会出现T越小,事故隐患越大的趋势。
3.4 车辆运行状态表征指标
3.4.1 车辆纵向运动状态表征指标:
(1)速度标准差、加速度标准差
(2)庞卡莱截面
车速变异性指标的求算
3.4.2 车辆横向运动状态表征指标:方向盘转角标准差
3.5 驾驶行为影响关键因素判别方法
3.5.1 驾驶行为实验设计方法
驾驶行为实验因素水平分析
实验方案确定方法(部分举例)
3.5.2 单指标正交实验层次模型
3.5.3 因素水平对结果影响程度分析方法:矩阵
4.基于模糊网络层次分析理论的驾驶行为安全性评估方法
(1)驾驶行为评估对象及关系分析:“感知安全性”、“决策安全性”、“操控安全性”
(2)评估思路及方法选择:模糊理论和ANP理论
确定指标等级
5.驾驶人认知能力评估指标体系及方法
专家评估占一定比重(置信权重)还有一部分数据挖掘
完成指之间对目标(安全性)的比重
以及具体的操作实施方法
6.典型应用
7.总结和展望:略
次任务驾驶安全性评价指标及评价模型研究
()德尔菲法:由美国着名的思想库—兰德公司首创,该方法是以专家的经验
知识知觉和判断为基础的评估方法德菲尔法针对专家采用问卷形式调查,保证每
名专家的独立性,且不受其他权威人士的干扰,而且能在相互反馈的基础上进行修正。()熵值法:根据某项指标的指标变异程度确定指标权重指标值的变异程度越
大,含有的信息量就越大,其信息熵越小,该指标的权重系数越大;反之,指标的变异程度越小,含有的信息量就越小,信息熵越大,该指标的权重系数就越小
()主成分分析法:皮尔逊()首先创用了主成分分析法,并由贺德临
(,)加以发展该方法主要通过求协方差和相关系数矩阵特征值和特征
根,并按照贡献率的不同确定出指标权重
()因子分析法:该方法由英国统计学家斯皮尔曼发明,它利用评价指标含有的
信息,将指标按照不同的类别进行分类,并建立因子模型,将原来的指标整合成少数不可观测且相互无关的因子
()层次分析法(,):年美国匹兹堡大学
提出了层次分析法,首次将定性分析与定量分析结合在一起该方法首先请专家
针对不同评价层次中的指标进行评价,并建立相应的判断矩阵,然后通过求矩阵特征值的办法确定出指标的权重
()网络分析法(,)网络分析法是年
再次提出的一种评价方法是在层次分析法()基础上延伸的一种
主观与客观相结合的决策方法构建网络式评价体系,层与层之间可以反馈,单
层内可以相互关联
()模糊网络分析法()该方法实现了模糊综合评判与网络分析法的有
机结合,年南京理工大学唐小丽在其博士论文中明确提出了模糊网络分析法,并
将网络分析法应用到模糊综合评判中,该方法针对具有依赖反馈的复杂问题进行赋权,
基于车辆运行监控系统的驾驶行为安全与节能
美国汽车工程协会(SAE)在1971 年以控制器局域网(CAN2.0B)作为网络核心协议制定了《车辆网络串行通信和控制协议》(SAE J1939)标准,参照国际标准化组织(ISO)的开放式数据互联模型定义了7 层基准参考模型,规定了汽车内部电子控制单元(ECU)的地址配置、命名、通讯方式以及报文发送优先级等,并对汽车内部各个具体的电控单元通讯作了详细的说明,这一标准成为车队管理技术发展的基础。它使得整车的ECU 形成一个控制局域网(CAN 总线),加之汽车零部件生产商与服务供应商运用信息技术与网络技术(IT&INTERNET),将自动车辆定位(AVL)控制器局域网系统与固定的车辆管理信息系统连接形成的车载通讯电脑,使得运输企业利用电脑管理运输活动的管理系统成为可能。
国内研究情况:
1.智能运营管理系统:苏州金龙―“G-BOS”智慧运营系统
权重:超速25%、发动机超转(非经济转速)5%、急加速15%、急减速15%、绿区驾驶(发动机最佳油耗区域)10%、长时间怠速10%、空挡滑行10%、怠速使用空调5%等九项评价指标
2.宇通客车―“安节通”智能运营系统
系统主要由车载终端设备、无线传播媒介、服务器平台三大部分组成
3.青年客车―“行车宝”系统
对车辆在运行过程中的经济转速区(绿区)停留平均时间、急加速、急减速、发动机超转、离合器使用、紧急制动等操作行为进行有效管理,通过燃油油量传感器监控、燃油流量传感器监控、怠速时间监控、怠速时间油量消耗监控及同辆车不同驾驶员的油量消耗数据对比分析等方式提高车辆运营的能效。
第二章驾驶行为安全与节能评价指标研究
2.1 驾驶行为安全评价指标研究(根据交通事故发生的原因)
指标确定:
2.2 驾驶行为节能评价指标研究
从行车前准备、驾驶操作(发动机起动、车辆预热、起步、换挡变速、加速、减速、车速控制、转向控制、特殊路段驾驶、行车温度控制、空调使用、发动机熄火、行车中检查、停车)、收车后检查等方面规范了驾驶员的驾驶操作。
(1) 车辆预热
推荐柴油机的最佳升温转速为1300r/min,柴油机的起步冷却液温度为40 ℃。因此,在气温不太低的情况下,发动机起动后在原地怠速运转不超过60s,无需专门预热即可起步。
(2) 起步操作
(3) 档位操作
(4) 加速操作
驾驶经验和试验结果均表明,缓加速比急加速要省油,就是强调了加速操作的柔和性。从而将加速操作的节能评价标准定为汽车的加速度。
(5) 减速操作
在同样的减速区间,采用急减速(Ja=0.69m/s2)将比平缓减速(Ja=0.3m/s2)多的百公里油耗大25.84%,减速距离短45.24m,油耗多0.21ml。不得空挡滑行。
(6)车速控制
当加速踏板位置不稳、车速上下波动时,汽车的百公里油耗会增加,而且速度波动越大,百公里油耗增加越大。此外,在速度波动范围相同的情况下,踩加速踏板越急比缓冲加速踏板的百公里油耗要高。
(7)车辆怠速
因此,当汽车停车后(尤其是长时间停车),要尽量减少发动机怠速空转时间,及时使发动机熄火。
(8)车辆技术状况
因此将用车辆信息技术监测车辆是否有故障信息作为评判车辆技术状况的方法之一。(9)车辆空调使用
评判空调使用合理性的较好方法是判断车厢内的温度是否过低。
综上
3.1 驾驶行为安全与节能评价指标理论模型
3.1.1 车辆预热
(1)评价模型及参数分析
(3)评价方法
对于车辆怠速预热操作的合理性,主要从三个方面来进行评价:(1)t≤ta1,即怠速时间不能过长;(2)T≤Ta1,即怠速时冷却液温度不应上升过高;(3)n≤na1,即怠速时不应使发动机高速空转。当t>ta1时,记录累计怠速预热时间及该不良驾驶行为的次数;当T >Ta1时,记录累计怠速预热时间及该不良驾驶行为的次数;当n>na1时,记录该不良驾驶行为的次数。
对于车辆底盘预热操作的合理性,主要从两个方面来进行评价:(1)Sa1≤S≤Sa2,即预热行驶距离应在合理范围;(2)n≤na2,即预热行驶时不应使发动机高速空转。当S>Sa2
或者S<Sa1时,记录底盘预热距离及该不良驾驶行为的次数;当n>na2时,记录该不良驾驶行为的次数。
g i = 60 * n /(V * K)
K = i* 1000 / ( 2 * 3.14 * r )
(3)评价方法
对于起步操作的合理性,主要是发动机转速n≤na3,即汽车起步时不应猛踩加速踏板使发动机转速过高。如果n>na3时,认为起步时存在猛踩加速踏板的操作,则记录该不良驾驶操作的次数。
3.1.3 挡位操作
3.1.4加速操作
J =(V2-V1)/(t2-t1)
3.1.5 减速操作
3.1.6 车速控制
ddv=(J2-J1)/(t2-t1)
3.1.7 转向操作
3.1.8 车辆怠速
3.1.9 灯光操作
车辆技术状况
驾驶员状态
软件完成
《驾驶行为表征指标及阐发办法研究》(吉林年夜学博士论文) 欧阳光明(2021.03.07) 目录: 1.国内外文献综述 2.驾驶行为信息收集计划 3.驾驶行为表征指标体系构建 4.平安性评估办法 5.驾驶人认知能力评估指标体系及办法 6.典范应用 1.国内外文献综述 研究布景:车越来越多、交通事故多、平安很重要、交通事故的预防亟待解决、国家重视、驾驶人员的错。 研究意义:1.驾驶行为平安性提升提供技术支持(改良驾驶培训质量和教育质量)2.车辆平安性……理论基础3.路途平安性……理论基础4.后续研究……理论基础。
研究现状:内容多、要求高、难度年夜。研究框架如下: (1)驾驶行为信息收集:实验环境(各种平台)、车辆运动及操控信息收集(仿真驾驶车辆信息、实际车辆信息收集系统、监控记录仪)、驾驶人生理、信息收集。 (2)驾驶行为技术阐发:面向驾驶行为阐发的虚拟交通情景构建技术;驾驶行为表征体系研究;实验设计及数据阐发办法研究。 (3)驾驶行为理论研究:建模、状态辨识、适应性、 后面:略 2.驾驶行为信息收集系统设计及实现 驾驶行为信息分类:感知、决策、操控 驾驶行为数据收集阐发: 驾驶人基本信息 姓名 年龄 身份证号码 文化水平1文盲2初中级以下3高中4年夜学及以上5不明 3年内交通肇事次数 驾驶员视觉信息: 注视行为表征参数注视点坐标
驾驶人生理特征信息 驾驶人心理特征指标 驾驶人把持行为信息
标的目的盘转角度驾驶人转动标的目的盘的角度 档位档位所处的状态 1 倒档、0 空档、15 档加速踏板开合度% 加速踏板踩踏水平占总行程的比例 制动踏板开合度% 制动踏板踩踏水平占总行程的比例 转向灯状态用于表征转向灯的状态 车辆运行状态信息 指标名称单位指标解释 速度公里/小时车辆运行实时丈量速度值 纵向加速度米/秒平方描述车辆纵向加减速行为 横向加速度米/秒平方描述车辆的横向侧倾特征 距离信息米描述车辆驶过的距离 路途基本信息 2.2.1 驾驶人生理、心理信息收集 (详细介绍了各种仪器) 2.2.2 驾驶人操控及车辆运行信息收集计划及技术实现 软件实现 2.2.3 基于GPS的路途信息收集计划及技术实现 ①数据坐标转换 ②样本点的识别与分类 ③计算模块设计及功能: 采样点坐标输入 ↓
如何运用大数据分析驾驶行为中风险所在? 我们知道,保险公司利用UBI,会构建两个分析模型,一个是驾驶风险模型,一个是基于驾驶风险和其他风险的保险定价模型。 1、驾驶风险模型是需要拥有车联网数据具备车联网运营经验,懂驾驶行为,懂车,能够进行数据分析,一般是主机厂、TSP或者数据平台公司。 2、保险精算模型是具备车险资质和精算经验,一般是保险公司,保险经纪公司,精算咨询服务公司 对大部分采用UBI计算的保险公司/车联网公司来说,驾驶风险模型会用到50个以上的变量,这些变量大部分是通过车联网采集,前装数据会多一点,质量好点,后装OBD的方式,有一些数据的噪音。 这些变量一般是:行驶里程(参配、图片、询价),平均出行的时长、平均出行距离、平均每天出行次数、平均每天出行时间、平均一天驾驶距离、平均一周驾驶距离、周一到周五平均驾驶次数、周末驾驶次数、平均速度、急加速/百公里、急刹车/百公里、路型、各地形的行驶里程、个地形的驾驶时间、各地形的停车时间、转弯次数、横向加速次数、滚动停止、变道次数、变速频率、变速级别、巡航控制、左转弯次数、速度偏差、假期驾驶、驾驶类型(速度VS时间)、驾驶类型偏差、出行半径、交叉口次数、转弯信号灯、安全带状态、安全气囊状态、灯/雨刷状态、车辆维修状态、出行间隔、拥堵指数、手机使用等。
因为各个变量之间也具备关联关系,这里我们会有基本算法的选择,是使用线性聚类,还是神经网络的决策树算法。 我们通过对车联网的一年,5千辆车的运行车联网数据进行了基本的算法建立,如下图。 首先通过log file建立初始数据,通过云端存储进行半结构化的数据,通过HIVE和HDInsight进行数据的清理,drivesession相当于进行驾驶风险的数列化,建立基本的数据表单,通过Dataset,AML(基于云端的机器学习)和数据训练模式,形成最后的驾驶风险打分,打分的结果会通过WebService进行展示。目前车联网数据收集来源,这里很多工作是进行了数据的清洗工作。同时根据保险公司提供的理赔名单和驾驶车主进行匹配,在训练模型中进行相关的训练。 要建立一个驾驶风险的基准,一般要经过下图的几个步骤: 第一步,数据准备: 1、了解管理层对UBI的期望和策略
南京三圣物流有限公司 https://www.doczj.com/doc/8d1263791.html, 编号:SS-CX-31-B01 驾驶员驾驶行为评估表 驾驶员:评估员:车号: 分数 地点:交通状况:日期: 1)保持车辆行驶在车道中央,能选择危险最小的车道[4] [3] [2] [1] 2)驾驶时能观察到远处的物体:在城市道路100米以外,高速公路400米以外[4] [3] [2] [1] 3)在驶入即将变红的路口时,能调整车速以免停车[4] [3] [2] [1] 4)避免突然变道、急刹车和急转弯[4] [3] [2] [1] 5)系好安全带,确认车内乘员就位,观察后视镜,确认车周围安全时才启动[4] [3] [2] [1] 6)在驶入无交通指挥的路口或可能发生碰撞的区域是,能仔细观众,减速慢行[4] [3] [2] [1] 7)在通过交叉路口前,能“左右左”观察并保持车周围有较宽阔的空间[4] [3] [2] [1] 8)能注意到路边的交通标志,并按要求行使[4] [3] [2] [1] 9)使用油门,合理控制车速,而不是频繁使用刹车[4] [3] [2] [1] 10)没有空挡滑行现象[4] [3] [2] [1] 11)和路人和其他车辆没有抢行[4] [3] [2] [1] 12)只在有足够空间、视野和距离,并确保安全是才驶入通过[4] [3] [2] [1] 13)每5--8秒看一次后视镜[4] [3] [2] [1] 14)能准确预见其他驾驶员和行人的动作,避免冲突和碰撞[4] [3] [2] [1] 15)当能见度较低或有其他必要时,能及时打开灯光以便他人能看到其车辆[4] [3] [2] [1] 16)保持每两秒转动一次眼睛,没有凝视[4] [3] [2] [1] 17)变道/转弯/刹车/停车前均提前开启转向灯,看后视镜,确认无危险时再动作[4] [3] [2] [1] 18)通常动能提前预测前方情况,准确判断和区分道路危险程度并合理动作[4] [3] [2] [1] 19)当遇到精力不集中的其他驾驶员、行人、骑车人时,能及时友好的使用喇叭 [4] [3] [2] [1] 或灯光提醒对方,并主动与之进行眼神接触,或沟通失败是及时避开 20)一旦出现可能引起注意力分散的情况,能迅速调整以便集中注意力[4] [3] [2] [1] 21)安全超车,没有三车一线、强行超车的想象[4] [3] [2] [1] 22)在交通堵塞且跟随的车辆很近时,能保持自己的跟车距离更大[4] [3] [2] [1] 23)如果可能,要至少保留一侧的车道,以便有足够的逃生空间[4] [3] [2] [1] 24)当前方车辆拥堵时,能尽量避免驶入凑堆[4] [3] [2] [1] 25)当周围的逃生空间丢失时,能迅速重新建立[4] [3] [2] [1] 26)不在左、右和前方的驾驶员的盲区内行驶[4] [3] [2] [1] 27)当后方有速度较快的车辆时,能让出车道,鼓励别人超过去[4] [3] [2] [1] 28)临时停车时能保持足够的距离。前车启动后,慢一拍起步[4] [3] [2] [1] 29)行驶时,即使在拥堵的情况下,避免并驾齐驱[4] [3] [2] [1] 30)始终保持安全的行程距离,必要时增大跟车距离[4] [3] [2] [1] 31) 32) 33) 总计得分
大数据环境下商用网联车驾驶行为评价系统的设计与实现 随着物流行业的迅速发展,商用车联网系统越来越受到国内外研究机构和学者的关注,驾驶人的驾驶行为习惯得到了越来越多关注。文章提出了一种大数据环境下,基于OBD技术的驾驶行为评价系统。利用行车过程中的行驶数据对驾驶行为进行量化评价。文章的数据源于由陕汽天行健集团提供的车载OBD设备读取的车辆信息。文章提出了数据清洗,数据转换的标准,并在此基础上开发了一系列驾驶行为识别算法。最后我们开发了Web端和App端的驾驶行为评价系统软件。 标签:OBD;大数据;驾驶行为 Abstract:With the rapid development of logistics industry,more and more domestic and foreign research institutions and scholars pay attention to the commercial vehicle networking system,and more and more attention has been paid to the driving behavior habits of drivers. This paper presents a driving behavior evaluation system based on OBD technology in the big data environment. The driving behavior is evaluated by driving data. The data of the article is derived from the vehicle information read by the vehicle OBD equipment provided by Shaanxi Auto Tianxingjian Group. In this paper,the standard of data cleaning and data conversion is put forward,and a series of driving behavior recognition algorithms are developed. Finally,we developed the driving behavior evaluation system software of Web and App. Keywords:OBD;big data;driving behavior 引言 随着智能交通系统在全球范围内的高速发展,商用车联网系统越来越受到国内外研究机构和学者的关注。例如福田戴姆勒开发的“iFOTON”超级车队管理系统,实现的功能包括车辆监控、油耗管理、驾驶员行为分析、金融服务、行车服务、售后服务、车货匹配,远程控制等一系列功能。这些帮助物流车队提高运营效率,真正实现超级车队,智能管理。国内车联网企业陕汽集团开发的天行健车联网系统,其相关功能:有位置服务、油耗/气耗管理、驾驶行为分析、远程故障诊断、偏线报警、重卡专用导航等功能。 以上的这些系统在车辆监控跟踪等方面有着卓越的表现,但随着商用网联车的普及,随之带来的驾驶数据量的骤增,物流企业对司机驾驶行为的关注,上面的平台无法满足要求。因此本文提出并建立了一种大数据环境下商用网联车驾驶行为评价系统,实现了对行车数据的存储,驾驶行为的识别,驾驶行为的评价等功能。 1 系统结构与原理
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910115450.8 (22)申请日 2019.02.15 (71)申请人 苏州工业园区职业技术学院 地址 215000 江苏省苏州市工业园区独墅 湖高等教育区若水路1号 (72)发明人 陈跃 (74)专利代理机构 苏州广正知识产权代理有限 公司 32234 代理人 孙茂义 (51)Int.Cl. B60W 40/09(2012.01) (54)发明名称 一种具有驾驶员行为分析监测功能的智能 辅助驾驶系统 (57)摘要 本发明公开了一种具有驾驶员行为分析监 测功能的智能辅助驾驶系统,包括:驾驶员动作 捕捉模块、汽车行驶状态采集模块、驾驶行为分 析控制模块、驾驶行为反馈模块。通过上述方式, 本发明一种具有驾驶员行为分析监测功能的智 能辅助驾驶系统,可以准确、快速的对驾驶员行 为和汽车行驶状态进行判断,及时的控制和提醒 驾驶员,防止出现意外, 提高安全性能。权利要求书1页 说明书3页 附图1页CN 109910901 A 2019.06.21 C N 109910901 A
权 利 要 求 书1/1页CN 109910901 A 1.一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,包括:驾驶员动作捕捉模块、汽车行驶状态采集模块、驾驶行为分析控制模块、驾驶行为反馈模块,所述驾驶员动作捕捉模块:用于捕捉和获取驾驶员在开车过程中的动作; 所述汽车行驶状态采集模块:用于获取在行驶过程中的汽车行驶状态信息和周边路况信息; 所述驾驶行为分析控制模块:根据获取到的驾驶员工作信息、在行驶过程中的汽车行驶状态信息和周边路况信息,判断对应时段内驾驶员行为是否存在异常,并根据判断结果对汽车进行干预控制; 所述驾驶行为反馈模块:根据用户提供的查询条件生成对应的驾驶行为反馈报告。 2.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述驾驶员动作捕捉模块包括动作获取模块、人脸识别模块、身体指数检测模块和空气检测模块。 3.根据权利要求2所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述动作采集模块包括手部动作获取模块、眼部动作获取模块、头部动作获取模块、脚部动作获取模块、嘴部动作获取模块。 4.根据权利要求2所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述身体指数检测模块包括脉搏监测模块、心率监测模块、呼吸监测模块。 5.根据权利要求2所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述空气检测模块包括酒精检测模块、毒气检测模块。 6.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述汽车行驶状态采集模块包括汽车运动监测模块、驾驶时长监测模块、驾驶速度监测模块。 7.根据权利要求6所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述汽车运动监测模块包括直线状态监测模块、转弯状态监测模块、超车状态监测模块、变道状态监测模。 8.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述驾驶行为分析控制模块包括判断信息设置模块、分析信息获取模块、行驶路况信息获取模块、驾驶员行为判断模块、驾驶干预控制模块,所述分析信息获取模块获取所述驾驶员动作捕捉模块、所述汽车行驶状态采集模块中的信息,并将信息传输至驾驶员行为判断模块,所述驾驶干预控制模块根据驾驶员行为判断模块的判断结果,对驾驶员进行提醒并对汽车进行制动控制。 9.根据权利要求8所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述行驶路况信息包括路面信息、位置信息、天气信息、路况信息。 10.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述驾驶行为反馈模块包括查询条件提取模块、查询信息检索模块、查询报告生成模块。 2
驾驶行为预研报告 人工智能-于海悦 2018年5月3日 1.驾驶行为分析: 驾驶行为的分析和研究,通常是作为其他车内应用的支撑技术而存在的。例如车道偏离预警(1ane departure warning,LDW)、车道保持(1ane keeping,LKS)、巡航控制系统(adaptive cruise control,ACC),都使用了相关的技术。 模型或理论: 1938年:安全行驶区域理论 1964年:紧张或焦虑状况下自调整驾驶模型 1974年:零危险模型 1977年:主被动安全模型 1980年:推理行为理论 1982年:危险自平衡理论 1983年:人行为能力模型 1984年:威胁规避模型 1985年:规划行为理论 1988年:阶梯型危险模型 1988年:激励建模方法 1989年:生成规则模型/基于规则模型 1992年:内模型 2000年:任务容量界面模型 1)驾驶员外部特性按照研究对象的不同,可以分为两类:针对特定信号的研究、以及针对特定场景的研究。针对特定信号的研究,主要是通过分析某一传感器所获得数据,进而研究与其相关联的特定驾驶行为。例如,通过分析方向盘夹角和刹车,判断驾驶员注意力是否集中、是否醉酒;通过分析眼睛注视位置,判断驾驶员的操作序列是否合理。针对特定场景的研究,则是考察最容易出事故的驾驶环节。通常会对这些场景、以及场景中的操作进行数学建模,进而描述和评定驾驶行为。常见的场景有停车、超车、变道等。 2)驾驶认知行为建模,这一类的研究,主要是将认知学的理论应用到驾驶行为研究领域。其研究目标是通过分析驾驶操作的内在机理,从本质上解释和理解驾驶行为,完成建模。由于人类对自我处理机制的理解还不够深刻,因此其建模结果很难用实验验证其准确性,更多的只能从定性的层面上对行为进行阐述。 3)驾驶心理研究,该类方法主要是通过调查问卷的方式,由驾驶员自己主观的进行自我评价,大致分为违规(violations)和失误(errors)两类。违规操作指的是驾驶员在明知危险的情况下故意执行的行为,通常用来评价驾驶风格;失误操作则是无意识中做出的危险操作,通常用来评定驾驶水平。 基于驾驶模拟器的数据采集和驾驶行为识别: 驾驶模拟器,通常指的是那些能够提供虚拟驾驶环境的机器。通过3D仿真软件,模拟汽车的真实行车环境;通过传感器,完成驾驶相关数据采集,并将这些信号的变动如实的反映到虚拟驾驶场景中。汽车的各项数据经由两种方式完成传递:传感器数据经由特殊的总线传输,并最终转换为数字信号为程序所使用:场景信息则以消息的形式在软件内部传递。这两种相异的传递方式为数据的采集带来了一定的困难。在驾驶模拟器内,数据的传输并不单单只在汽车总线内部,会在程序间,和网络间传输。在多驾驶模拟器的环境下,通常需要将数据发送到局域网内,供其他机器上的应用使用。 最重要的是:数据采集模块、驾驶行为模块、服务模块。数据采集模块主要是实现驾驶数据的收集和保存,构建模型训练的原始数据,同时为驾驶行为识别模块提供特征向量序列。驾驶行为模块提供了两个功能,
SooPAT 一种基于场景的驾驶行为评价方 法 申请号:201310151019.1 申请日:2013-04-26 申请(专利权)人广州通易科技有限公司 地址510630 广东省广州市天河区翰景路1号金星大厦14楼 发明(设计)人蔡文学 主分类号G07C5/08(2006.01)I 分类号G07C5/08(2006.01)I 公开(公告)号103247092A 公开(公告)日2013-08-14 专利代理机构广州市华学知识产权代理有限公司 44245 代理人黄磊
(10)申请公布号 (43)申请公布日 2013.08.14C N 103247092 A (21)申请号 201310151019.1 (22)申请日 2013.04.26 G07C 5/08(2006.01) (71)申请人广州通易科技有限公司 地址510630 广东省广州市天河区翰景路1 号金星大厦14楼 (72)发明人蔡文学 (74)专利代理机构广州市华学知识产权代理有 限公司 44245 代理人 黄磊 (54)发明名称 一种基于场景的驾驶行为评价方法 (57)摘要 本发明公开了一种基于场景的驾驶行为评价 方法,该评价方法的步骤为:S1、通过车辆ECU 数 据采集装置采集车辆工况数据和车辆性能数据, 并把采集到的数据通过无线网络实时同步到云端 智能平台;S2、云端智能平台利用大数据分析方 法,对与该行程路线相同的驾驶行程记录数据进 行分析;S3、云端智能平台接收移动智能终端发 送过来的数据,将这些数据存储在平台中,通过大 数据分析方法,利用历史行程数据,对本次驾驶行 程做出准确的分析。本发明准确性高,可准确地评 价司机在不同场景下驾驶动作的恰当程度,客观 地反应司机的驾驶技能水平,同时计算效率高,可 快速地对司机的驾驶行为做出评价,及时地反馈 评价结果。 (51)Int.Cl. 权利要求书2页 说明书4页 附图2页 (19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书2页 说明书4页 附图2页(10)申请公布号CN 103247092 A *CN103247092A*
目录 第一章绪论 (1) 1.1研究背景 (1) 1.1.1我国道路交通安全与能源形势分析 (1) 1.1.2研究驾驶行为安全与节能的必要性 (2) 1.2 国内外研究现状 (3) 1.2.1国外研究现状 (3) 1.2.2国内研究现状 (5) 1.3研究意义 (7) 1.4研究的主要内容 (8) 1.5 本章小结 (9) 第二章驾驶行为安全与节能评价指标研究 (10) 2.1 驾驶行为安全评价指标研究 (10) 2.1.1客车重特大交通事故原因分析 (10) 2.1.2货车重特大交通事故原因分析 (13) 2.1.3驾驶行为安全评价指标 (17) 2.2驾驶行为节能评价指标研究 (18) 2.2.1驾驶行为规范性对车辆节能的影响 (18) 2.2.2驾驶行为节能评价指标 (23) 2.3驾驶行为安全与节能评价指标体系 (24) 2.4本章小结 (25) 第三章驾驶行为安全与节能评价方法研究 (26) 3.1驾驶行为安全与节能评价指标理论模型 (26) 3.1.1 车辆预热 (26) 3.1.2 起步加速操作 (27) 3.1.3挡位操作 (28) 3.1.4 加速操作 (30) 3.1.5减速操作 (31) III
3.1.6车速控制 (32) 3.1.7转向操作 (33) 3.1.8 车辆怠速 (34) 3.1.9灯光操作 (35) 3.1.10 安全带使用 (35) 3.1.11 车辆技术状况 (35) 3.1.12 车辆内温度调节 (36) 3.1.13驾驶员状态 (37) 3.2驾驶行为安全与节能评价指标理论模型参数设定方法 (37) 3.2.1 评价模型参数需求 (37) 3.2.2车载CAN总线数据信息提取 (38) 3.3 驾驶行为综合评分方法 (40) 3.4 本章小结 (43) 第四章驾驶行为综合评价软件开发 (44) 4.1软件设计框架 (44) 4.2 软件的功能 (45) 4.3本章小结 (47) 第五章车辆运行监控下驾驶行为安全与节能评价的试验验证 (48) 5.1驾驶行为评价模型预设信息 (48) 5.2驾驶行为安全与节能评价方法的试验验证 (52) 5.2.1 城市道路驾驶模式下驾驶行为安全与节能评价方法的试验验证 (52) 5.2.2高速公路驾驶模式下驾驶行为安全与节能评价方法的试验验证 (57) 5.3本章小结 (61) 结论与展望 (62) 1 结论 (62) 2展望 (62) 参考文献 (63) 攻读学位期间取得的研究成果 (66) 致谢 (67) IV
公司机动车驾驶员安全行为评价办法 第一章总则 第一条为加强机动车驾驶员的动态管理,规范驾驶员安全行为评价,提高其安全意识和职业素质,保障企业运输生产安全,根据《**安全管理办法》、《**公司机动车驾驶员安全行为评价办法》等有关规定,结合公司道路运输安全实际,特制定本办法。 第二条本办法适用于公司各单位(简称“单位”)。 第三条本办法所称机动车驾驶员(简称“驾驶员”)是指已取得企业准驾证并驾驶企业机动车辆的专职驾驶员。 第四条本办法所称安全行为评价(简称“评价”)是指对驾驶员遵守道路交通法律法规、企业安全管理规章制度等行为的评价。 第五条单位对驾驶员评价工作应遵循公平、公正、公开的原则。 第六条驾驶员应当自觉遵守国家相关法律、法规及企业的安全管理制度,文明从业,履行职责,为企业提供安全、优质的运输服务。 第七条各单位应建立驾驶员评价信息管理平台,充分利用信息系统完善驾驶员管理的数据库。 第八条公司**部负责指导、监督和检查全市各单位驾驶员评价工作。 驾驶员所在单位(简称“用人单位”)的安全管理人员依照本办法有关规定负责组织、实施本单位驾驶员的评价工作,并将评价结果报告上一级安全管理部门。
第二章评价等级与计分 第九条驾驶员评价等级分为优良、合格、基本合格和不合格,分别用A级、B级、C级和D级表示。 第十条驾驶员评价内容包括: 一、遵守道路交通法律法规、企业安全管理规章制度; 二、机动车辆操作和日常维护; 三、责任事故。 第十一条评价以年度为周期,每年一次,实行百分制,满分为100分,实施倒扣计分法(扣分标准见附件1),每项扣分至该项基本分扣完为止。 第十二条扣分是以公安交通部门出具的事故责任认定书、违反道路交通安全法规通知书或单位安全检查人员检查发现的违章行为为依据,对照机动车驾驶员安全行为评价扣分标准进行扣分。 凡违反道路交通安全法规被公安交通管理部门记分的,本办法将相应按记分的3倍进行扣分。 第十三条一个评价周期届满,经签注评价等级后,该评价周期内的扣分予以清除,不转入下一个评价周期。 初次领取准驾证的驾驶员从开始独立驾驶企业机动车辆之日起 开始计分。 第十四条驾驶员违反道路交通安全法规和企业安全管理制度的行为,处罚与扣分同时执行。 驾驶员一次有两个及以上的违法、违章行为,扣分时应分别计算,扣分值累加。 第十五条驾驶员对违法、违章行为处罚不服,可向上级单位