1、USB启动
USB 启动时,i.MX283 第一级启动环境将其自身初始化为一个USB Device 设备,经过USB 通讯连接线缆连接到开发PC机,在开发PC上使用
sb_loader.exe软件将当前目录下的sb文件通过USB传输到 EasyARM-iMX283
的RAM上并且运行。具体步骤如下:
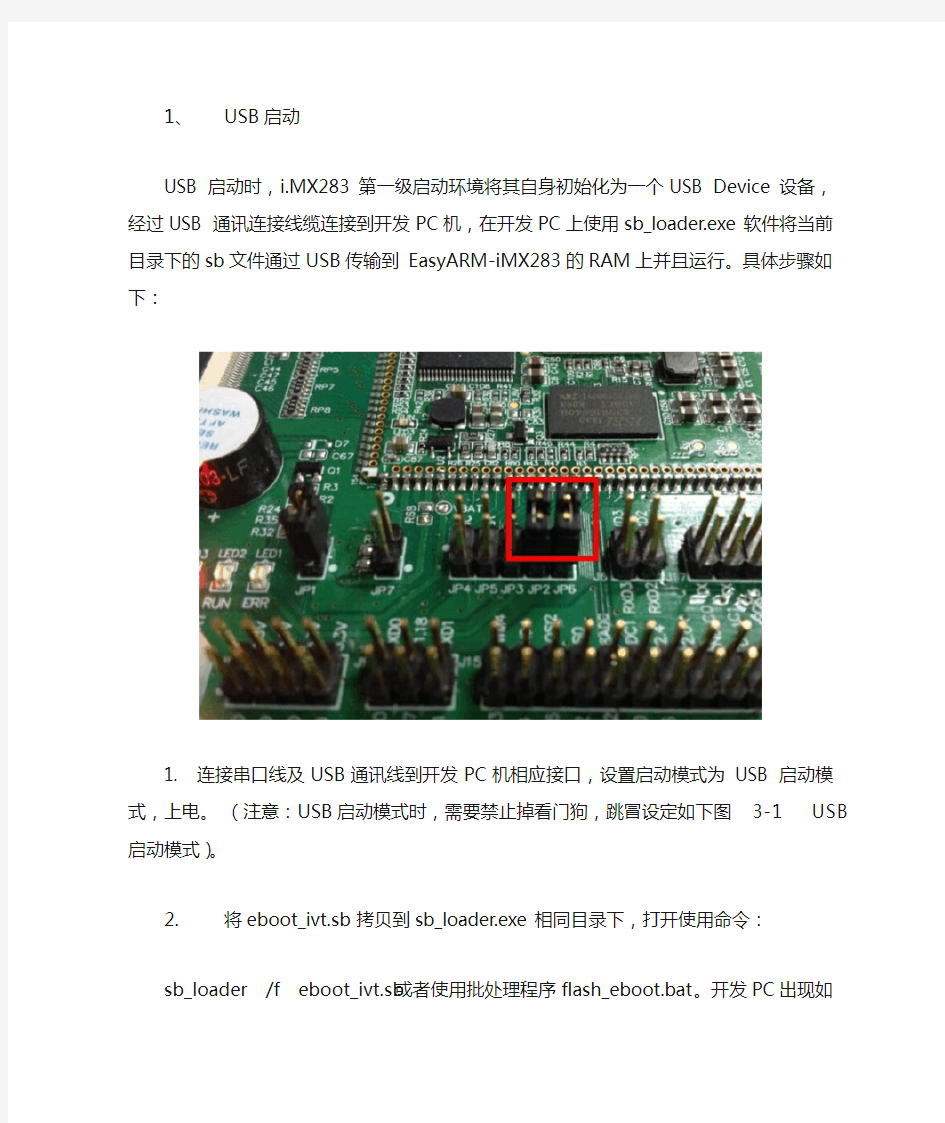
1. 连接串口线及USB通讯线到开发PC机相应接口,设置启动模式为 USB 启动模式,上电。(注意:USB启动模式时,需要禁止掉看门狗,跳冒设定如下图 3-1 USB启动模式)。
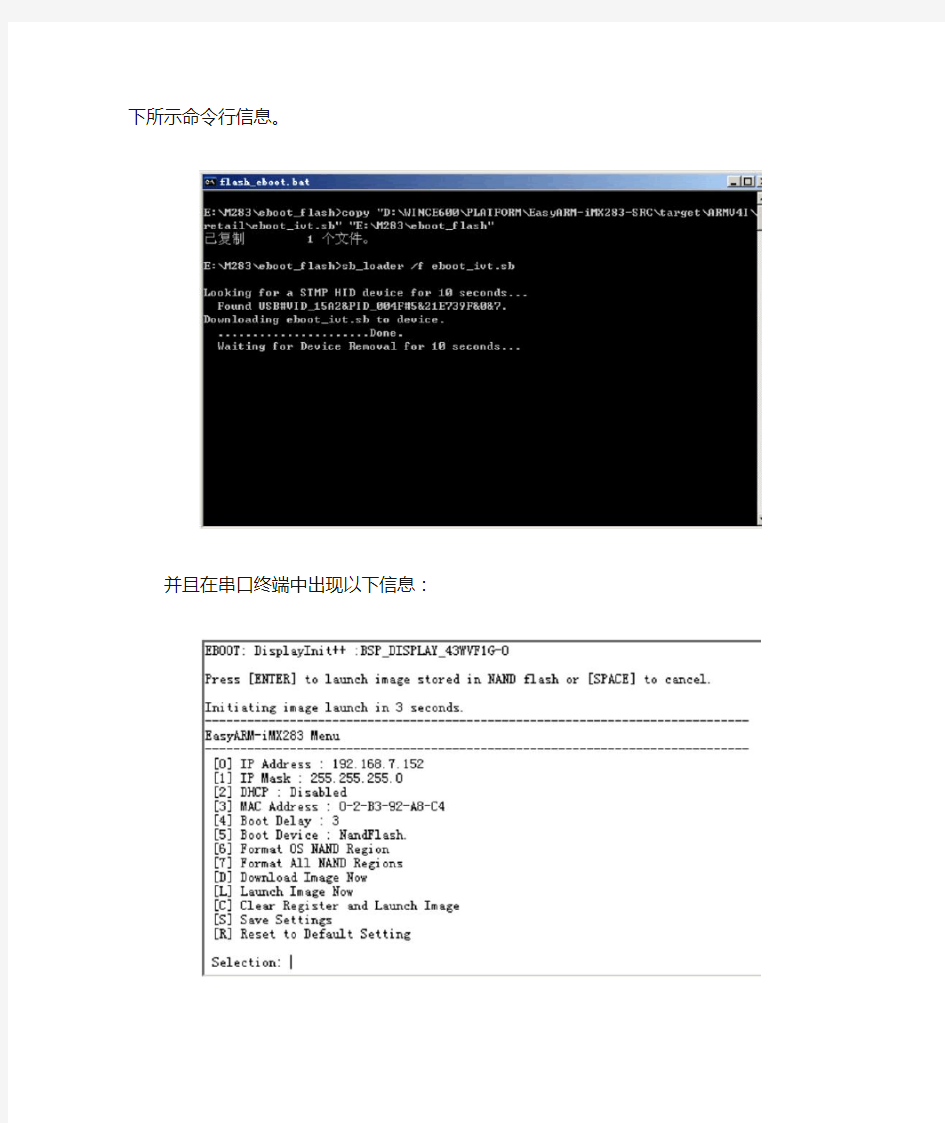
2.将eboot_ivt.sb 拷贝到sb_loader.exe 相同目录下,打开使用命令:
sb_loader /f eboot_ivt.sb或者使用批处理程序flash_eboot.bat。开发PC出现如下所示命令行信息。
并且在串口终端中出现以下信息:
2、加载U-Boot到Flash
实现NandFlash 的 Eboot烧写,需要用到Eboot对NandFlash的烧写功
能。向NandFlash进行Eboot烧写,可以由如下步骤完成。
1.使用USB启动模式启动Eboot,按住空格键进入 Eboot菜单选项。如下所
示。
2.打开出厂WinCE 工程,配置项目参数,选择其中下载对象
eboot_ivt.msb,然后配置VS2005下载参数。
依次打开VS2005菜单中的“项目”->“EasyARM-iMX283-SRC属性”,如下所示。
在“EasyARM-iMX283-SRC 属性页”中选择“配置属性”下的“General”,在此下面设置“Build Type”为“Release”,在“Target file name for debugger:”中手工填入“eboot_ivt.msb”。
如下所示。
3.连接网线到PC开发机。使用Eboot的选项“d”进行eboot下载。
4.修改主机IP
修改开发主机IP地址固定为 7 段(出厂内核中设定的IP地址段为 7 段)。修改的IP地址如下所示。
5.设置VS2005连接参数,连接EasyARM-iMX283进行内核下载
打开针对此平台的WinCE项目(比如1.3节中构建的工程项目),依次打开vs2005菜单中“Target” -> “Connetivity
Options…”选择其中的“Kernel Service Map”出现如下图 1.70 所示面板。
在上面的面板中,在“Target Device”中选择“CE Device”,在“Download”中选择“Ethernet”
然后点击后面的“Settings”按钮。则出现如下所示设置面板。
等待1-2S时间,在“Active target devices:”将会出现当前同一网段内所有发出“BOOTME”信息的WinCE设备标识。双击其中的“EasyARM-iM43204”,上面将会自动显示出当前WinCE设备的IP地址为“192.168.7.152”。点击“OK”按钮回到“Target Device Connetivity Options”设置面板中,此时,在选择的“Ethernet”下面将会是本次需要下载的设备标识“EasyARM-
iM43204”。下面的“Tansport:”也进行同样设置。然后点击“Apply”和“Close”完成本次设置。
点击VS2005菜单“Target”下面的“Attach Device”,如下所示。此时进行内核下载。
6.选择内核最终下载目的地。
在开发机上进行WinCE设备连接后,在进行内核下载之前还需要选择本次具体内核下载的目的设备:0-NandFlash、1-SD/TF卡、2-RAM。这里选择0内核下载到NandFlash中(定制WinCE内核过程中进行调试时,推荐NK下载到RAM,无需NandFlash烧写,加快调试速度)。选项如下图 1.73所示。
此时,开发机上将会通过以太网使用UDP协议向EasyARM-iMX283 传输生成的eboot_ivt.msb文件,如下图 1.74所示。
3、加载NK到Flash
加载NK镜像与加载U-Boot步骤,只是在步骤2中把在“Target file name for debugger:”填入的eboot_ivt.msb”更改为nk.bin,其余步骤不变。
4、烧写完后按把USB启动跳线帽拆掉,按复位键完成系统启动。
摄像头驱动的移植(ZC3XX) 一、普通设计 第一:首先确保所用的FS2410开发板上移植的是Linux-2.6.22.6内核,USB 及CS8900A均能工作 第二:移植驱动gspcav1-20071224.tar.gz: ( 1 ) 在linux-2.6.22.6/drivers/usb 目录下新建media 目录,将gspcav1-20071224.tar.gz copy 到 media 下并解压。为了使media 编译进内核,需修改linux-2.6.22.6/drivers/usb 目录下的Kconfig、Makefile 文件。具体操作: [linux@weijing usb]$ vi Kconfig 添加下面语句: source "drivers/usb/media/Kconfig" [linux@weijing usb]$ vi Makefile 添加下面语句: obj-$(CONFIG_USB_SPCA5XX) += media/ ( 2 )为添加 gspcav1-20071224 编译选项,在 media 下新建 Kconfig、Makefile 文件。 [linux@weijing media]$ vi Kconfig # # USB Multimedia device configuration # comment "USB Multimedia devices" depends on USB config USB_SPCA5XX tristate "USB SPCA5XX Sunplus/Vimicro/Sonix jpeg Cameras" depends on USB && VIDEO_DEV ---help--- Say Y or M here is you want to use one of these wedcams: The built-in microphone is enabled by selecting USB Audio support.
关于OV7725程序移植OV7670总结 用了三天的时间,终于搞定了程序的移植。也是第一次移植stm32程序。 最终的移植成功版本,改了SCCB通信、FIFO读写时序、寄存器配置、引脚修改的一些地方。 一、移植过程中SCCB通信遇到的问题 1.由于野火的OV7725摄像头内置上拉电阻,所以在配置时SDA和SDL都被设置成了Mode_OD (开漏模式),但是战舰带的OV7670摄像头并没有内置上拉电阻,所以不能用开漏模式,否则不能正常输出高电平,SDA线也不会被主机拉高。 于是参考了战舰的例程。战舰对SCL线设置为了PP(推挽输出模式),SDA线的输出则需要切换。如下: 在战舰的例程上进行修改时,由于需要修改一些IO口,所以需要把这句改掉。我尝试用这样的手法修改: 发现并不可行。查询网络,原因可能是在运行中途修改管脚模式时,由于32的LCKK:锁密钥,并不能直接修改管脚工作模式。我们选择对底层寄存器进行操作。。
于是乎这样改: *注:SDA为PC7口。 2. 还有需要修改的地方就是:在需要读取SDA电平状态的时候,要用SCCB_SDA_IN 这个语句把替换掉SDA_H,而不是先SDA_H 然后再SCCB_SDA_IN 。否则不能正确读取到SDA线的电平。 3.最后一步,器件ID: 在这一段代码用到: 二、FIFO读数据时序的修改 1.由于每个人选择的数据口可能不同,有的是0-7位,有的是8-15位,所以我这里给出了两种不同的读取时序。 H_MY_READ_FIFO_PIXEL(YUV)是当数据位选择的是8-15位时候用的; L_MY_READ_FIFO_PIXEL(YUV)是当数据位选择的是0-7位时候用的。 *注:因为我要的二值化的图像,所以只读取了YUV 分量中的Y分量。
监控摄像机安装的详 细流程
监控摄像机安装的详细流程与细节 监控摄像头的安装方法: 1) 在满足监视目标视场范围要求的条件下,其安装高度:室内离地不宜低于2.5m;室外离地不宜低于3.5m。 2) 监控摄像头及其配套装置,如镜头、防护罩、支架、雨刷等,安装应牢固,运转应灵活,应注意防破坏,并与周边环境相协调。 3) 在强电磁干扰环境下,监控摄像头安装应与地绝缘隔离。 4) 信号线和电源线应分别引入,外露部分用软管保护,并不影响云台的转动。 5) 电梯厢内的监控摄像头应安装在厢门上方的左或右侧,并能有效监视电梯厢内乘员面部特征。 云台、解码器安装: 1) 云台的安装应牢固,转动时无晃动。 2) 应根据产品技术条件和系统设计要求,检查云台的转动角度范围是否满足要求。 3) 解码器应安装在云台附近或吊顶内(但须留有检修孔)。 监控摄像头控制设备安装: 1) 控制台、机柜(架)安装位置应符合设计要求,安装应平稳牢固、便于操作维护。机柜架)背面、侧面离墙净距离应符合维修要求。 2)监控摄像头所有控制、显示、记录等终端设备的安装应平稳,便于操作。其中监视器(屏幕)应避免外来光直射,当不可避免时,应采取避
光措施。在控制台、机柜(架)内安装的设备应有通风散热措施,内部接插件与设备连接应牢*。 3) 控制室内所有线缆应根据设备安装位置设置电缆槽和进线孔,排列、捆扎整齐,编号,并有永久性标志。 监控工程施工常见问题 安防工程的专业施工及安装标准根据国家有关部门近年来颁发的安防设计、施工规范、规程和标准,在总结我公司几年来安防工程的设计和施工经验和基础上,结合安防科技发展的新技术、新产品的技术要求,本着服务社会、用户第一的宗旨,一、室内配线的技术室 安防工程的专业施工及安装标准 根据国家有关部门近年来颁发的安防设计、施工规范、规程和标准,在总结我公司几年来安防工程的设计和施工经验和基础上,结合安防科技发展的新技术、新产品的技术要求,本着服务社会、用户第一的宗旨, 一、室内配线的技术 室内配线不仅要求安全可*,而且要使线路布置合理、整齐,安装牢固。技术要求如下: 使用导线,其额定电压应大于线路的工作电压;导线的绝缘应符合线路的安装方式和敷设的环境条件。导线的截面积应能满足供电和机械强度的要求。 配线时应尽量避免导线有接头。除非用接头不可的,其接头必须采用压线或焊接。导线连接和分支处不应受机械力的作用。
看——摄像头是如何做出来的! 市场上一般主流的摄像头都在一百多元左右,基本上都归成外设耗材类产品。很多人去买摄像头的时候,都以为没有什么技术含量,没有什么工艺要求,买个鼠标键盘还要看看手感,买摄像头就不太在意了,所以造成很多生产摄像头的厂商大量制造品质低劣的产品,有无牌无厂的,有大品牌去找小厂OEM的,鱼龙混杂,这些摄像头“厂家”基本上有三个类型: 一、纯加工厂,这类厂家无开发能力,到市场上买一些外壳(俗称:模具),买已经设计好的公版PCB,就进行手工贴片和组装。专门接单,赚的是加工费,有时也随便贴个牌子,以低价或抛单的形式来渠道上出现。 二、品牌运营商和兼营商,这类商家具有很强的渠道推广的能力,品牌也有较好的知名度,摄像头产品主要是从纯加工厂里买来,也叫OEM。虽然有品牌,但外观长得都差不多一个样,产品同质化严重。 三、综合化厂家,拥有有从外观设计、电路开发、软件和驱动研发、生产、销售的综合企业,这类厂家在最所投入的精力最大,产品也较具特色,能较好的把握市场和消费者的需求,不断开发新的产品推向市场。 笔者近来就去一家综合化的摄像头开发生产厂家全程参观了J-CAM的全套生产过程。从外观设计,PCB电路板设计、精密模具设计制造、注塑成形、无尘车间喷油、电路板SMT高速贴片、插件、装配、检测、包装。
(接下来,介绍的就是此款摄像头的制造流程) 出色的摄像头不仅需要有出色的效果,同样,也要有吸引人的外观。成功的外观设计,需要出色的设计理念,但要把将这理念在具体实物体现出来,又需要精湛的工艺。 设计篇 一、外观设计 据天敏工业设计小组介绍,摄像头前期设计的工作也很复杂。 一个新的摄像头的诞生,最初由设计师的灵感而成,设计师首先用手画草图,将自己的的想法粗略地在纸上体现,画出简易的大体外观。 (天敏子弹头的设计草图) 在ID小组讨论后决定后,用Rhino犀牛工业造型软件先画几个三维的外观效果图,经讨论大致确认后,把这个粗略的外观图纸文件送去打版中心进行CNC三维雕刻打“手版”,然后对实体模型进行评审,然后会根据模型计师进行不断的修改,这个过程是要将摄像头的最后所要实现的外观确认。外观打样后,即进行结构论证和设计工作,一般使用“PRO-E”软件,结构设计。 在设计底座时,就打了很多个样版。设计师根据市场的调研,发现现大多数的摄像头的底座都
手机摄像头模组生产工艺的SMT流程及SMT应用分析 摘要 随着通信技术的不断扩延,手机已成为人们生活、工作、学习、娱乐不可或缺的工具。而手机摄像头模组是手机中非常重要的组件之一,其品质的好坏直接影响手机整体品质的高低。因此在手机摄像头模组生产的过程中每一步都是要严格把关的,不能有丝毫的懈怠。在手机摄像头模组中,FPC软电路板是决定手机照相生成图片的关键组件之一,因此它的生产工艺及质量好坏显得尤为重要。 基于此,首先简单介绍了手机摄像头模组原理以及SMT技术在手机摄像头模组生产工艺中的应用,着重阐述了手机摄像头模组FPC软电路板的改良设计和SMT生产工艺流程及产品质量分析。根据手机摄像头模组FPC软电路板的具体要求,合理进行SMT技术指标优化,分析研究了手机摄像头模组再流焊SMT焊接温度分布曲线。针对FPC软电路板产品设置了AIO(automatic optical inspection)检测及ICT在线测试方法。 关键字:手机摄像头模组 SMT AIO检测 ICT在线测试
Mobile phone camera module production technology of SMT processes and SMT application ABSTRACT Summary as communication technologies continues expansion, mobile phone has become the people's life, work, learn, play an indispensable tool. Mobile phone camera module is one of the very important components in the mobile phone, its quality directly affect the overall level of quality phones. In the mobile phone camera module production at every step in the process is to strictly, there can be no slack. Mobile phone camera module in the FPC flexible circuit board is to determine the key components of the camera phone picture, therefore its production process and the quality is particularly important. Based on this, the first simply introduced the mobile phone camera module principle and SMT technology and its application in mobile phone camera module production, focusing on mobile phone camera module is described FPC flexible circuit board design and analysis of SMT production process and product quality. According to mobile phone camera module FPC flexible circuit board requirements, reasonable SMT technical specifications, analysis of mobile phone camera module for reflow SMT soldering temperature distribution curves.FPC flexible circuit board set AIO products (automatic optical inspection) test online test methods and ICT. Keyword: mobile phone camera module;SMT;AIO ICT;on-line test
Kernel version :2.6.22.6 Crosstool :arm-softfloat-linux-gnu-gcc-3.4.5 Board :FS2410 System :ubuntu 8.10 Source :spcaview-20061208.tar.gz SDL-1.2.13.rar servfox-R1_1_3.rar gspcav1-20071224.tar.gz 整理:LXP 一、移植gspcav1-20071224 FS2410开发板上移植的是Linux-2.6.22.6内核,USB及CS8900A均能工作,由于linux-2.6.22.6/drivers/usb 目录下没有media 目录,故移植步骤如下: [linux@farsight usb]$ pwd /work/kernel/linux-2.6.22.6/drivers/usb [linux@farsight usb]$ vi Kconfig 添加 source "drivers/usb/media/Kconfig" [linux@weijing usb]$ vi Makefile 添加 obj-$(CONFIG_USB_SPCA5XX) += media/ [linux@weijing media]$ pwd /work/kernel/linux-2.6.22.6/drivers/usb/media [linux@weijing media]$ vi Kconfig # # USB Multimedia device configuration # comment "USB Multimedia devices" depends on USB config USB_SPCA5XX tristate "USB SPCA5XX Sunplus/Vimicro/Sonix jpeg Cameras" depends on USB && VIDEO_DEV [linux@weijing media]$ vi Makefile # # Makefile for USB Media drivers #
【usb摄像头驱动的移植】 常见的usb摄像头有两种格式:YUV,GSPCA 格式 YUV格式:不经压缩的视频GSPCA格式:视频经过了压缩 1.如果摄像头是YUV格式: 通用的移植步骤是: make menuconfig Device Drivers ---> <*> Multimedia support ---> [*] Cameras/video grabbers support [*] Media USB Adapters ---> < *> USB Video Class (UVC) (NEW) 2.视频通过一张一张图片连续播放得到视频信息,每秒播放24帧图像会得到视频信息 3.添加摄像头驱动(GSPCA) 1.将摄像头插入到pc电脑,让pc电脑去识别摄像头。 将得到的详细的硬件信息是: V(vendor)ID: 0AC8 PID:303B 2.在内核的源码中搜索VID或者PID. grep "303b" * ./* -nR 搜索结果:drivers/media/usb/gspca/zc3xx.c:6986: {USB_DEVICE(0x0ac8, 0x303b)}, 425 config USB_GSPCA_ZC3XX 426 tristate "ZC3XX USB Camera Driver" 427 depends on VIDEO_V4L2 && USB_GSPCA 说明要添加USB_GSPCA_ZC3XX VIDEO_V4L2 USB_GSPCA 3.在菜单中用/ 搜索USB_GSPCA 搜索结果:Symbol: USB_GSPCA [=n] │ │Type : tristate │Prompt: GSPCA based webcams │Location: │-> Device Drivers │(1) -> Multimedia support (MEDIA_SUPPORT [=n]) │-> Media USB Adapters (MEDIA_USB_SUPPORT [=n]) │Defined at drivers/media/usb/gspca/Kconfig:1 │Depends on: USB [=y] && MEDIA_SUPPORT [=n] && MEDIA_USB_SUPPORT [=n] 4.根据搜索结果找到对应的驱动在菜单中选中添加: make menuconfig -> Device Drivers │
制造流程-设计篇 外观设计: 据天敏工业设计小组介绍,摄像头前期设计的工作也很复杂。 一个新的摄像头的诞生,最初由设计师的灵感而成,设计师首先用手画草图,将自己的的想法粗略地在纸上体现,画出简易的大体外观。 (天敏子弹头的设计草图) 在 ID 小组讨论后决定后,用 Rhino 犀牛工业造型软件先画几个三维的外观效果图,经讨论大致确认后,把这个粗略的外观图纸文件送去打版中心进行 CNC 三维雕刻打“手版”,然后对实体模型进行评审,然后会根据模型计师进行不断的修改,这个过程是要将摄像头的最后所要实现的外观确认。外观打样后,即进行结构论证和设计工作,一般使用“ PRO-E ”软件,结构设计。 在设计底座时,就打了很多个样版。设计师根据市场的调研,发现现大多数的摄像头的底座都是“夹子”,这种夹子在夹笔记本就还可以,但在设计很个性的液晶显示器上很多是夹不着的,有太厚的原因,背板是不规则。设计师专门设计了一个万能的“挂座”,这是一个根据力学原理来设计的底座,不用夹子也可以很轻松的挂在笔记本和液晶显示器上,同样也可以放在桌面或 CRT 显示器上。这个“挂座”很费精力,材料、模具应如何设计、出模方式等,都跟模具设计师做了大量的讨论构通,也打了很多的样版来做试验。在结构设计阶段,需要丰富的模具知识,跟模具设计师的大量沟通
(天敏子弹头三维外观效果图) 具体的内部尺寸确定,那时设计师就可以将 PCB 板的尺寸给硬件工程师,在设计同时, PCB 的设计从现在开始也在同步地进行,相互之间也要做大量的沟通,有时为了争一点点空间,相互争个面红耳斥。 为了检查结构尺寸和 PCB 板的配合,还要做结构手板,经过检测,如果外观有问题或者内部结构与 PCB 板不合,再进行修改。修改外观其实是一个反复的过程,直到所有的设计达到最好的配合,最终确定模具,才正式开始交 PRO-E 图纸给专业的模具厂制造模具。从外观到结构,这个设计的时间最长,不确定的因素也很多,通常要两三个月,之后就快起来了。 外观设计的工序: ?灵感:手绘草图确认大体外观 ?实践:软件 pro-e 或犀牛等画出大致外观 ?初期颜色确定:用 3D MAX 进行渲染 ?用 pro-e 做出内部的结构,实现外观所需要的 ?做手版,目的:确认外观、检查结构与 PCB 配合 ?修改结构图 ?制造模具(大约 30 天)
摄像头移植过程详解 一、移植环境: 1、主机:Ubuntu 10.10发行版 2、目标机:FS_S5PC100平台 3、交叉编译工具:arm-none-linux-gnueabi.tar.bz2(解压后文件名为:arm-2010.09) 4、摄像头模块:OV9650 5、Linux文件系统:rootfs_nfs.tar.xz(解压后文件名为:rootfs) 6、内核:linux-3.0-fs4412_V3 参考资料: 基于2.6.35内核的OV9650摄像头驱动移植 位置: https://www.doczj.com/doc/a71749753.html,/link?url=06uZmL4CLYtqqihIObtg1lywmgflOb9SZ3BvsPJomIWi2qWJxtpldR pB8BE06SmGnBlABua_IqiZIdxVWKKa_q&wd=&eqid=9eef387c000029710000000355bf0a68 (调试过程中没有用到,主要看老师给的文档) 二、工具及内核配置 1、工具链的配置 将“工具” “Linux”目录中的“toolchain-4.4.6-farsight.tar”文件拷贝到工作目录中。如图: 注意:工作目录可以自行创建,这里以/home/linux/work/4412为例子: tar xvf toolchain-4.4.6-farsight.tar 环境变量的添加 sudo vi /etc/bash.bashrc 在最后面添加以下命令 export PATH=$PATH:/home/linux/work/4412/toolchain-4.4.6/bin/(注意改为你的目录地址)2、编译bootloader源码 将\Cortex-A9\镜像源码目录中的uboot-fs4412_v2.tar拷贝到工作目录中,如图: 执行命令: tar xvf uboot-fs4412_v2.tar.xz
uCOS-II移值过程实例讲解 我将uCOS-II 移植到了EPONS 的C33209的平台上,接下来我就基于我移植好的代码讲解如何将uCOS-II从一种MCU移植到另一种MCU。 首先介绍uCOS-II的文件,如下表: ucos_ii.h os_cfg.h os_cpu.h os_core.c os_dbg_r.c os_flag.c os_mbox.c os_mem.c os_mutex.c os_q.c os_sem.c os_task.c os_time.c ucos_ii.c os_cpu_c.c os_cpu_a.asm 其中我们和硬件平台相关的文件的文件名被加粗了,也就是说若要将uCOS-II移植到新的平台上只要关心以上四个文件就行了。当然你也可以根据需要再添加你自己的和平台相关的文件,事实上我也是这么做的。在我移植的例子中就添加了四个和平台相关的文件,文件如下表: crt0.c drv_rtc.c vector.c ext.s crt0.c是用来初始化系统的比如说MCU的一些特殊寄存器、设置外围的总线接口,等。drv_rtc.c是用来初始化系统中的一个RTC的,这个RTC可以为内核提供必要的基于时间片调度的时基。同时提供了对RTC开始和停止的操作函数。在我的例子中RTC会每秒产生32次中断。vector.c顾名思义,它是系统上电后为系统提供矢量入口表的文件,当然也包括中断向量表。ext.s是为uc/OS-II 提供OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()函数的具体实现以及在用户程序的中断函数出入时要调用的状态保护和状态恢复函数OS_SA VEALL ()和OS_RESTOREALL ()。前面两个函数的功能是:OS_ENTER_CRITICAL()屏蔽中断;OS_EXIT_CRITICAL()恢复原来的中断使能状态。 1. os_cpu_a.asm的说明 要想顺利的移植首先要了解uCOS-II的一些基本概念。 uCOS-II实质上是一个嵌入式操作系统内核,她只负责管理各个任务,为每个任务分配CPU时间,并且负责任务之间的通讯。内核提供的基本服务是任务切换。这是个很重要的概念,可以说你只要掌握了任务切换的本质,可以说你就
MTK移植camera说明 1、裁剪模块 修改文件:config/tf902/ProjectConfig.mk Eg\ config/tf902/ProjectConfig.mk ```````````````````````````````````````````` CUSTOM_HAL_EEPROM = dummy_eeprom CUSTOM_HAL_FLASHLIGHT = constant_flashlight CUSTOM_HAL_FMRADIO = mt6628 -CUSTOM_HAL_IMGSENSOR = ov8825_mipi_raw s5k8aayx_mipi_yuv +CUSTOM_HAL_IMGSENSOR = gc2235mipi_raw gc0313mipi_yuv#ov8825_mipi_raw s5k8aa yx_mipi_yuv#添加摄像头模块,定义hal层 CUSTOM_HAL_LENS = ov8825af dummy_lens CUSTOM_HAL_MAIN2_IMGSENSOR = CUSTOM_HAL_MAIN_BACKUP_IMGSENSOR = CUSTOM_HAL_MAIN_BACKUP_LENS = dummy_lens -CUSTOM_HAL_MAIN_IMGSENSOR = ov8825_mipi_raw +CUSTOM_HAL_MAIN_IMGSENSOR = gc2235mipi_raw #ov8825_mipi_raw#主摄像头在hal层的修改 CUSTOM_HAL_MAIN_LENS = ov8825af CUSTOM_HAL_MSENSORLIB = mmc328x akm8975 ami304 yamaha530 mag3110 akmd8963 b mm050 CUSTOM_HAL_SENSORS = sensor CUSTOM_HAL_SUB_BACKUP_IMGSENSOR = CUSTOM_HAL_SUB_BACKUP_LENS = dummy_lens -CUSTOM_HAL_SUB_IMGSENSOR = s5k8aayx_mipi_yuv +CUSTOM_HAL_SUB_IMGSENSOR = gc0313mipi_yuv #s5k8aayx_mipi_yuv #副摄像头在hal层的定义 CUSTOM_HAL_SUB_LENS = dummy_lens CUSTOM_KERNEL_ACCELEROMETER = bma050 CUSTOM_KERNEL_ALSPS = cm36283 @@ -79,7+79,7 @@ CUSTOM_KERNEL_FLASHLIGHT = constant_flashlight CUSTOM_KERNEL_FM = mt6628 CUSTOM_KERNEL_HDMI = CUSTOM_KERNEL_HEADSET = accdet -CUSTOM_KERNEL_IMGSENSOR = ov8825_mipi_raw s5k8aayx_mipi_yuv +CUSTOM_KERNEL_IMGSENSOR = gc2235mipi_raw gc0313mipi_yuv#ov8825_mipi_raw s5k 8aayx_mipi_yuv#添加摄像头在kernal模块 CUSTOM_KERNEL_KPD = kpd CUSTOM_KERNEL_LCM = bi097xn02_xga_dpi CUSTOM_KERNEL_LEDS = mt65xx +CUSTOM_KERNEL_MAIN_IMGSENSOR = gc2235mipi_raw #ov8825_mipi_raw#在底层定义主摄像头
监控摄像头怎么安装,详解安装步骤 现在许多的公共场所,随处可见的都是电子眼、摄像头,甚至许多人在自己家里也会安装摄像监控设备,那么监控摄像头怎么安装呢?许多人对次不是很了解,下面新浪装修抢工长就为大家讲解一下监控摄像头的安装步骤。 监控摄像头怎么安装?首先安装监控系统 第一,决定是现有电脑安装视频采集卡,还是直接采购凯威嵌入式硬盘录像机做您的监控主机; 使用电脑安装监控卡,整体投入比较低,适用于熟悉电脑安装、有专业人员值守、功能要求比较多的场所。电脑需要24小时开机;使用嵌入式硬盘录像机不需要专业知识、不需要值守、操作非常简单,像使用VCD一样方便; 第二, 决定需要几个摄像机,并确定每个监控摄像机的监视范围和影像品质 先决定监视用摄像机数目,再根据具体的情况确定摄像机的镜头监视范围:必须要明确摄像机到监控点的距离和需要监控的面积,大家可以根据摄像头镜头计算公式得出大致的镜头参数。至于清晰度,我们认为:420电视线的摄像机已经足够了,如果现场的要求比较高则可以采用凯威540线的高清红外摄像机
第三:是否要有夜视功能 在走廊、门厅、过道、库房等光线比较暗的地方,可以考虑红外夜视功能的摄像机,需要注意的是,红外摄像机除专业夜视或特别订制以外,红外摄像机也需要现场有灯光辅助五指的条件下,红外距离会成倍缩短。现场如果为花园草坪,红外效果更差。 第四:是布线还是采用无线 除了昂贵的价格以外,无线网络确实省去摄像机布线的麻烦与不美观,但需要注意距离与障碍的问题。原则上水泥建材会缩短无线的传送距离,,金属材料则会完全遮蔽无线讯号,发射器(在摄像机端)与凯威(在主机端)要远离其他的电器以避免干扰,如要采用无线网络,就要有负担2倍以上价格的准备。我们建议除非必要,尽量使用有线传输。 第五:现场监控与网络监控
监控摄像机安装的详细流程与细节 监控摄像头的安装方法: 1) 在满足监视目标视场范围要求的条件下,其安装高度:室内离地不宜低于2.5m;室外离地不宜低于3.5m。 2) 监控摄像头及其配套装置,如镜头、防护罩、支架、雨刷等,安装应牢固,运转应灵活,应注意防破坏,并与周边环境相协调。 3) 在强电磁干扰环境下,监控摄像头安装应与地绝缘隔离。 4) 信号线和电源线应分别引入,外露部分用软管保护,并不影响云台的转动。 5) 电梯厢内的监控摄像头应安装在厢门上方的左或右侧,并能有效监视电梯厢内乘员面部特征。 云台、解码器安装: 1) 云台的安装应牢固,转动时无晃动。 2) 应根据产品技术条件和系统设计要求,检查云台的转动角度范围是否满足要求。 3) 解码器应安装在云台附近或吊顶内(但须留有检修孔)。 监控摄像头控制设备安装: 1) 控制台、机柜(架)安装位置应符合设计要求,安装应平稳牢固、便于操作维护。机柜架)背面、侧面离墙净距离应符合维修要求。 2)监控摄像头所有控制、显示、记录等终端设备的安装应平稳,便于操作。其中监视器(屏幕)应避免外来光直射,当不可避免时,应采取避光措施。在控制台、机柜(架)内安装的设备应有通风散热措施,内部接插件与设备连接应牢*。 3) 控制室内所有线缆应根据设备安装位置设置电缆槽和进线孔,排列、捆扎整齐,编号,并有永久性标志。 监控工程施工常见问题 安防工程的专业施工及安装标准根据国家有关部门近年来颁发的安防设计、施工规范、规程和标准,在总结我公司几年来安防工程的设计和施工经验和基础上,结合安防科技发展的新技术、新产品的技术要求,本着服务社会、用户第一的宗旨,一、室内配线的技术室 安防工程的专业施工及安装标准 根据国家有关部门近年来颁发的安防设计、施工规范、规程和标准,在总结我公司几年来安防工程的设计和施工经验和基础上,结合安防科技发展的新技术、新产品的技术要求,本着服务社会、用户第一的宗旨, 一、室内配线的技术 室内配线不仅要求安全可*,而且要使线路布置合理、整齐,安装牢固。技术要求如下:使用导线,其额定电压应大于线路的工作电压;导线的绝缘应符合线路的安装方式和敷设的环境条件。导线的截面积应能满足供电和机械强度的要求。
#include
#define CLEAR(x) memset (&(x), 0, sizeof (x)) struct buffer { void * start; //记录缓冲帧地址 size_t length; //一帧的大小 }; //pic process--------------------------------------------------------------------------------------------------------- #pragma pack(1) typedef struct BITMAPFILEHEADER{ unsigned short bfType;//位图文件的类型, unsigned long bfSize;//位图文件的大小,以字节为单位 unsigned short bfReserved1;//位图文件保留字,必须为0 unsigned short bfReserved2;//同上 unsigned long bfOffBits;//位图阵列的起始位置,以相对于位图文件或者说是头的偏移量表示,以字节为单位} BITMAPFILEHEADER; #pragma pack() typedef struct BITMAPINFOHEADER{//位图信息头类型的数据结构,用于说明位图的尺寸 unsigned long biSize;//位图信息头的长度,以字节为单位 unsigned long biWidth;//位图的宽度,以像素为单位 unsigned long biHeight;//位图的高度,以像素为单位 unsigned short biPlanes;//目标设备的级别,必须为1
监控摄像头安装流程 监控安装指导与注意事项 A、线路安装与选材 1、电源线:要选“阻燃”电缆,皮结实,在省成本前提下,尽量用粗 点的,以减少电源的衰减。 2、视频线:SYV75-3线传输在300米内,75-5线传输500米内,75-7的线可传输800米;超过500米距离,就要考虑采用“光缆”。另外,要注意“同轴电缆”的质量。 3、控制线:一般选用“带屏蔽”2*1.0的线缆,RVVP2*1.0。 4、穿线管:一般用“PVC管”即可,要“埋地、防爆”的工程,要选“镀锌”钢管。 B、控制设备安装 1、控制台与机柜:安装应平稳牢固,高度适当,便于操作维护。 机柜架的背面、侧面,离墙距离,考虑到便于维修。 2、控制显示设备:安装应便于操作、牢靠,监视器应避免“外来光”直射,设备应有“通风散热”措施。 3、设置线槽线孔:机柜内所有线缆,依位置,设备电缆槽和进线 孔,捆扎整齐、编号、标志。
4、设备散热通风:控制设备的工作环境,要在空调室内,并要清 洁,设备间要留的空间,可加装风扇通风。 5、检测对地电压:监控室内,电源的火线、零线、地线,按照规 范连接。检测量各设备“外壳”和“视频电缆”对地电压,电压越高,越易 造成“摄像机”的损坏,避免“带电拔插”视频线。 C、摄像机的安装 1、监控安装高度:室内摄像机的安装高度以 2.5~5米,为宜,室外以3.5~10米为宜;电梯内安装在其顶部。 2. 防雷绝缘:强电磁干扰下,摄像机安装,应与地绝缘;室外安装,要采取防雷措施。 3、选好BNC:BNC头非常关键,差的BNC头,会让你生不如死,一点都不夸张。 4、红外高度:红外线灯安装高度,不超过4米,上下俯角20度为佳,太高或太过,会使反射率低。 5、红外注意:红外灯避免直射光源、避免照射“全黑物、空旷处、水”等,容易吸收红外光,使红外效果大大减弱。 6、云台安装:要牢固,转动时无晃动,检查“云台的转动范围”,是否正常,解码器安装在云台附近。 监控安装流程
一、移植环境: 【移植环境】 1、主机:Ubuntu 10.10发行版 2、目标机:FS_S5PC100平台 3、交叉编译工具:arm-none-linux-gnueabi-4.5.1 4、摄像头模块:OV9650 5、Linux文件系统:rootfs. cramfs. 6、内核:linux-2.6.35-farsigt 二、内核配置 1.修改vi drivers/i2c/busses/Kconfig (参考实验二十六I2C驱动编写及测试) 修改 config I2C_S3C2410 tristate "S3C2410 I2C Driver" depends on ARCH_S3C2410 || ARCH_S3C64XX help Say Y here to include support for I2C controller in the Samsung S3C2410 based System-on-Chip devices. 为: config I2C_S3C2410 tristate "S3C2410 I2C Driver" depends on ARCH_S3C2410 || ARCH_S3C64XX || ARCH_S5PC100 help Say Y here to include support for I2C controller in the Samsung S3C2410 based System-on-Chip devices. 2.内核配置并重新编译内核 $ make menuconfig Device Drivers ---> <*> I2C support ---> <*> I2C device interface I2C Hardware Bus support ---> <*> S3C2410 I2C Driver
1、USB启动 USB 启动时,i.MX283 第一级启动环境将其自身初始化为一个USB Device 设备,经过USB 通讯连接线缆连接到开发PC机,在开发PC上使用 sb_loader.exe软件将当前目录下的sb文件通过USB传输到 EasyARM-iMX283 的RAM上并且运行。具体步骤如下: 1. 连接串口线及USB通讯线到开发PC机相应接口,设置启动模式为 USB 启动模式,上电。(注意:USB启动模式时,需要禁止掉看门狗,跳冒设定如下图 3-1 USB启动模式)。 2.将eboot_ivt.sb 拷贝到sb_loader.exe 相同目录下,打开使用命令: sb_loader /f eboot_ivt.sb或者使用批处理程序flash_eboot.bat。开发PC出现如下所示命令行信息。
并且在串口终端中出现以下信息: 2、加载U-Boot到Flash 实现NandFlash 的 Eboot烧写,需要用到Eboot对NandFlash的烧写功 能。向NandFlash进行Eboot烧写,可以由如下步骤完成。
1.使用USB启动模式启动Eboot,按住空格键进入 Eboot菜单选项。如下所 示。 2.打开出厂WinCE 工程,配置项目参数,选择其中下载对象 eboot_ivt.msb,然后配置VS2005下载参数。 依次打开VS2005菜单中的“项目”->“EasyARM-iMX283-SRC属性”,如下所示。 在“EasyARM-iMX283-SRC 属性页”中选择“配置属性”下的“General”,在此下面设置“Build Type”为“Release”,在“Target file name for debugger:”中手工填入“eboot_ivt.msb”。 如下所示。
摄像头工作原理详解 摄像头的工作原理 摄像头的工作原理是:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出。具体而言(参见图5-1),摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,电压信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如0.3V),并保持一段时间。这相当于,紧接着每行图像信号之后会有一个电压“凹槽” ,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。然后,跳过一行后(因为摄像头是隔行扫描的),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着会出现一段场消隐区。该区中有若干个复合消隐脉冲,其中有个远宽于(即持续时间远长于)其它的消隐脉冲,称为场同步脉冲,它是扫描换场的标志。场同步脉冲标志着新的一场的到来,不过,场消隐区恰好跨在上一场的结尾和下一场的开始部分,得等场消隐区过去,下一场的视频信号才真正到来。摄像头每秒扫描25幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50 场图像。奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。 摄像头有两个重要的指标:分辨率和有效像素。分辨率实际上就是每场行同步脉冲数,这是因为行同步脉冲数越多,则对每场图像扫描的行数也越多。事实上,分辨率反映的是摄像头的纵向分辨能力。有效像素常写成两数相乘的形式,如“320x240” ,其中前一个数值表示单行视频信号的精细程度,即行分辨能力;后一个数值为分辨率,因而有效像素=行分辨能力×分辨率。 摄像头选择 因为S12单片机的AD转换时间在不超频的情况下最短为7us,所以如果选用一个分辨率为320线的摄像头,则单行视频信号持续的时间约为20ms/320=62.5us,AD对单行视频信号采样的点数将不超过 [62.5/7]+1=9个。若使用分辨率为640线的摄像头,则单行视频信号持续的时间约为20ms/640=31us,AD对单行视频信号采样的点数将不超过[31/7]+1=5个。这就是说,分辨率越高,单行视频信号持续的时间就越短,AD对单行视频信号所能采样的点数就越少。如前所述,摄像头的分辨率越高,尽管可提高纵向分辨能力,却会减少单片机AD采样单行信号的点数,削弱了横向分辨能力。现在市场上摄像头的分辨率通常都在300线以上,由此推得单行视频信号的持续时间至多为20ms/300=66us左右,AD采样每行视频信号的点数至多为 [66/7]+1=10个(不超频情况下),这对赛车定位来说是不够的。所以,在选择摄像头时,应当尽量选择分辨率低的摄像头,这样做会降低摄像头的纵向分辨能力(但降低后仍然远远够用),却可以增加单片机采样单行视频信号的点数,提高横向分辨能力。在本次设计过程中,在市场上所能找到的分辨率最低的摄像头是采