
1 简单控制系统
1.1控制系统组成和控制性能指标
1.1.1 控制系统的组
在生产过程中有各种控制系统,图1-1所示为几个简单控制系统的示例。在这些控制系统中都有一个需要控制的过程变量,例如图中的温度、压力、液位等,这些需要控制的变量称为被控变量(Controlled Variable)。为了使被控变量与希望的设定值(Set Point)保持一致.需要有一种控制手段,例如图中的蒸汽流量、回流流量和出料流量等,这些用于调节的变量称为操纵变量(Manipulated Variable)或操作变量。被控变量偏离设定值的原因是由于过程中存在干扰(Disturbance),例如蒸汽压力、泵的转速、进料量的变化等。设定值又称为参比变量(Reference Variable ) ,随动控制系统的参比变量是变化的。
a)温度控制系统b)压力控制系统c)液位控制系统
图1-1 简单控制系统示例
在这些控制系统中,检测元件和变送器将被控变量检测并转换为标准信号,当系统受到干扰影啊时,检测信号与设定值之间就有偏差,因此.检测变送信号在控制器中与设定值比较,其偏差值按一定的控制规律运算.并输出信号驱动执行机构改变操纵变量.使被控变量回复到设定值。
可见,简单控制系统由检测变送单元、控制器、执行器和被控对象组成。
检测元件和变送器(Sensor and Transmitter)用于检测被控变量.并将检测到的信号转换为标准信号输出。例如热电阻或热电偶和温度变送器、压力变送器和液位变送器等。
控制器(Controller)用于将检测变送单元的输出信号与设定值信号进行比较.按一定的控制规律对其偏差信号(Error Signal)进行运算,运算结果输出到执行器。控制器可以采用模拟仪表的控制器或由微处理器组成的数字控制器.例如用DCS中的控制功能模块等实现。
执行器(Actuator)又称最终环节(Final Element),它是控制系统环路中的最终元件,直接用于控制操纵变量变化。执行器接收控制器的输出信号.通过改变执行器节流件的流通面积来改变操纵变量。图1-1中用TT、PT和LT分别表示温度、压力和液位变送器,用TC、PC和LC表示相应的控制器,图中的执行器都用控制阀表示。它可以是气动薄膜控制阀、带电气阀门定位器的气动控制阀等。执行器也可用变频调速电机等实现。
被控对象(Object 或Process)是需要控制的设备,例如图1-1 中的换热器、
泵和液位储罐等。
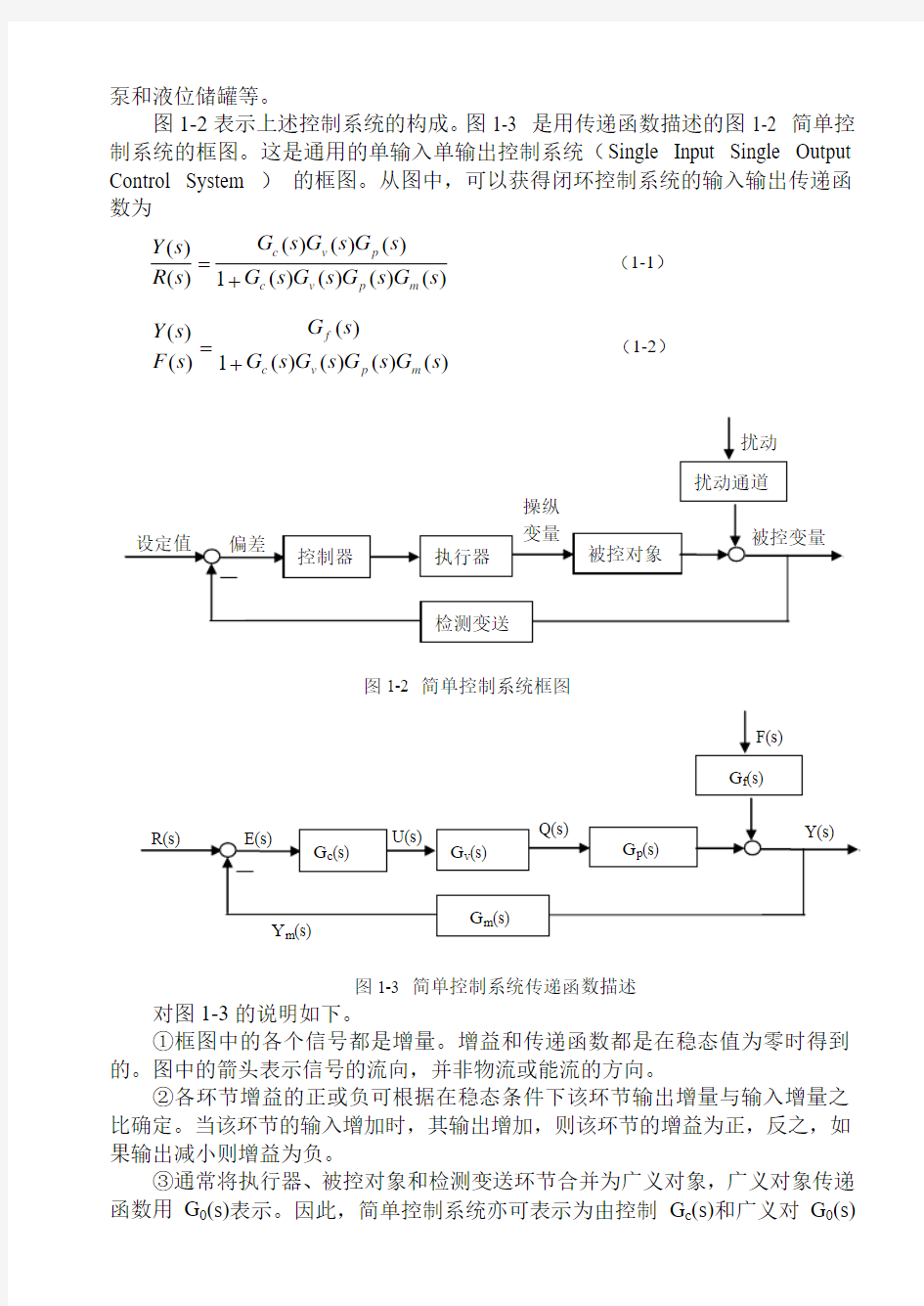
图1-2表示上述控制系统的构成。图1-3 是用传递函数描述的图1-2 简单控制系统的框图。这是通用的单输入单输出控制系统(Single Input Single Output Control System ) 的框图。从图中,可以获得闭环控制系统的输入输出传递函数为
)
()()()(1)()()()()(s G s G s G s G s G s G s G s R s Y m p v c p v c += (1-1) )
()()()(1)()()(s G s G s G s G s G s F s Y m p v c f += (1-2)
图1-2 简单控制系统框图
图1-3 简单控制系统传递函数描述
对图1-3的说明如下。
①框图中的各个信号都是增量。增益和传递函数都是在稳态值为零时得到的。图中的箭头表示信号的流向,并非物流或能流的方向。
②各环节增益的正或负可根据在稳态条件下该环节输出增量与输入增量之比确定。当该环节的输入增加时,其输出增加,则该环节的增益为正,反之,如
果输出减小则增益为负。
③通常将执行器、被控对象和检测变送环节合并为广义对象,广义对象传递函数用G 0(s)表示。因此,简单控制系统亦可表示为由控制G c (s)和广义对G 0(s)
组成的闭环。
④将各环节的增益除以该物理量的基准值可得到无量纲的描述。当控制器输人和输出信号采用统一标准信号时,广义对象的增益是无量纲的。
⑤简单控制系统有两个通道:控制通道和扰动通道。控制通道是操纵变量到被控变量的通道。扰动通道是干扰到被控变量的通道。当扰动影响被控变量时,简单控制系统通过控制通道的调节,改变操纵变量来克服扰动对被控变量的影响。这类控制系统称为定值控制系统(Fixed Set Point Control System)。当控制系统的设定值变化时,动控制系统同样通过控制通道的调节,改变操纵变量,使被控变量能跟随设定值的变化而变化。这类控制系统称为随动控制系统(Follow-up Control System)或伺服控制系统(Servo Control System)。
⑥控制系统中如果包含采样开关,则这类控制系统称为采样控制系统(Sampling Control System ),它可以由常规仪表加采样开关组成,也可以直接由计算机控制系统组成。根据采样开关的数量、设置的位置、采用保持器的类型和采样周期的不同,控制系统的控制效果会不同,应根据具体情况分析。
⑦通常将检测变送环节表示为l,其原因是被控变量能够迅速正确地被检测和变送,此外,为了简化,也常将G m(s)与被控对象G p(s)合并在一起考虑。但是,对于有非线性特性的检测和变送环节,例如采用孔板和差压变送器测时,应分别列出。
⑧被控变量分为直接被控变量和间接被控变量两大类。简单控制系统的设计主要是被控变量和操纵变量的选择。被控变量的选择原则是:尽可能选用直接被控变量;有足够的灵敏度;工艺合理等。操纵变量的选择原则是:静态合理;动态迅速;稳定性和经济性等。
1.1.2 控制系统的控制性能指标
控制系统的性能指标可用时域指标或积分指标描述。
稳定性是控制系统性能的首要指标。这表明组成控制系统的闭环极点应位于s左半平面。准确性是控制系统的重要性能指标。这表明控制系统的被控变量与参比变量(设定值)之间的偏差,即静态偏差应尽可能小。快速性也是控制系统的重要性能指标。当控制系统受到扰动影响时,控制系统应尽快地做出响应,改变操纵变量,使被控变量与参比变量之间有偏差的时间尽可能短。除了上述性能指标外,控制系统的偏离度也是极重要的控制系统性能指标。它表示在控制系统运行过程中被控变量偏离参比变量的离散程度。
控制系统的控制性能指标应根据工艺过程的控制要求确定。不同的工艺过程对控制的要求不同。例如,简单液位控制系统常常只需要保证液位不溢出或排空,而精密精馏塔温度控制的控制精度可能在正负零点几度。其次,不同类型的控制系统,其控制性能指标也不同,例如,通常随动控制系统的衰减比建议调整在10:1 以上,而定值控制系统的衰减比则建议调整在4:1 。
控制系统的控制性能指标可分为时域控制性能指标和积分控制性能指标。1.1.2.1 时域控制性能指标
用阶跃输入信号作用下控制系统输出响应曲线表示的控制系统性能指标称为时域控制性能指标。时域控制性能指标有衰减比、最大偏差(超调量)、振荡频率和回复时间、偏离度等。图1-4 所示为定值和随动控制系统的时域控制性能
指标。
a) 随动找制 b) 定值控制
图1-4 控制系统的时域控制性能指标 (l )衰减比n
衰减比(Subsidence Ratio )是控制系统的稳定性指标。它是相邻同方向两个波峰的幅值之比。即 n=2
1B B (1-3) 衰减比n=1 : 1表明控制系统的输出呈等幅振荡,系统处于临界稳定状态;衰减比小于 1 : l 表明控制系统输出发散,系统处于不稳定状态;衰减比越大,系统越稳定。通常,希望随动控制系统的衰减比为10 : 1 ,定值控制系统的衰减比为 4 : 1。
衰减率ψ也用于表示控制系统的稳定性。它是每经过一个周期后,波动幅度衰减的百分数,即 ψ=1
21B B B -×100% (1-4) 二阶系统常用衰减度m 表示衰减的程度。它与衰减比n 、阻尼比ξ的关系为
m e n π2=
21ξξ
-=m (1-5)
衰减比与衰减率、衰减度有一一对应关系,见表 l -1。
随动控制系统中,超调量(Overshoot )α定义为
α =C
B 1×100% (1-6 )
式中,C 是输出的最终稳态值; B 1是输出超过最终稳态值的最大瞬态偏差。
定值控制系统中,最终稳态值很小或趋于零,因此,采用最大动态偏差 A 表示超调程度。即
︱A ︱ =︱B 1+C ︱ (1-7)
超调量和最大动态偏差(Maximum Dynamic Error )表征在调节过程中被控变量偏离参比变量的超调程度。 它也反映了控制系统的稳定性。
(3) 余差
余差(Steady-state Error )是控制系统的最终稳态偏差e (∞) 差为。在阶跃输入作用下,余差为
e (∞)= r -y (∞)= r -C ( l-8 )
定值控制系统中 r=0 ,因此有e (∞)=-C 。余差是控制系统的稳态准确性指标。
(4)回复时间和振荡频率
过渡过程要绝对地达到新稳态值需要无限时间,因此.用被控变量从过渡过程开始到进入稳态值±5%或±2%范围内的时间作为过渡过程的回复时间 T , (Settling Time )。回复时间是控制系统的快速性指标。
过渡过程的振荡频率ω与振荡周期T 的关系是 ω=T
π2 ( l-9 ) 在相同衰减比n 下,振荡频率越高,回复时间越短;在相同振荡频率下,衰减比越大,回复时间越短,因此,振荡频率也是控制系统的快速性指标。
控制系统的闭环极点位置与控制系统的性能指标有关。图1-5 所示为二阶控制系统的等衰减比线、等振荡频率线和等回复时间线。等衰减比线是通过原点的径向线;等频率线是平行于实轴的水平线;等回复时间线是平行于虚轴的垂直线。
图1-5控制系统性能与零极点位置
例l-1 二阶系统的控制性能指标。
设控制系统闭环传递函数为二阶环节,即
)()(s R s Y =)
)((βαβαj s j s k ++-+ ( l-10 ) 则衰减比 n=21B B =e βα
π2=e m π2 (1-11 )
式中,m 为衰减度。
超调量 α=C
B 1=e βαπ- (1-12) 最大动态偏差 A=K(1+ e βα
π-) (1-13)
振荡频率 ωd =ωn 21ξ-=β (1-14)
式中,β是闭环特征根的虚部, ωn 是自然频率。
回复时间 T n ≈n ξω)
4~3( (1-15)
阶跃输入信号下的控制系统性能指标还有上升时间、峰值时间等。除采用阶跃输入信号外,也可采用脉冲输入信号下的控制系统性能指标,它们有脉冲响应的峰值和回复时间等。通常,采用阶跃信号作用下控制系统的输出作为时域响应性能指标。
(5)偏离度
控制系统偏离度是被控变量统计特性的描述。在控制系统运行过程中.被控变量的分布通常遵循正态分布。如果其均值a 位于设定值,则它的标准差α是控制系统偏离度的度量。图1-6 所示为被控变量的正态分布曲线。图中均值为0。曲线1的偏离度小,其标准差为0.5;曲线2的偏离度大,其标准差为1。根据正态分布曲线的特性,在 a±2.58α范围内时,被控变量落在该范围的概率为 99 % ;在a 士1.96α。范围内时,被控变量落在该范围的概率为95%。
图1-6 被控变量的正态分布曲线
下面以造纸工业中的纸张定量和水分控制为例说明偏离度的影响。纸张的定量用克(g )表示,例如,复印纸有70g 、80g 等,如果控制系统的偏离度小(例如标准差为0.5),为使纸张的定量控制在70g ,则可将设定值设置在70+1.96×0.5=70.98g 就能使95%的产品满足定量控制要求(实际为97.5%合格)。如果控制系统的偏离度大(例如标准差为1),则为了使95%的产品合格,应将定量控制系统的设定值设置在71.96g 。可见,由于控制系统的偏离度大,使纸浆原料的消耗增加。同样,为了控制纸张的含水量不大于5 % ,假设采用相同的标准差,当控制系统偏离度小时,水分控制系统的设定值可设置在4%,而偏离
度大的控制系统,其设定值就必须设置在3%。这说明,在同样的原料条件下,采用控制系统偏离度小的控制系统生产的产以更多。
通常,用2倍标准差(±2α)与均值之比表示控制系统的偏离度。这时,95.5%的产品将是合格品。当某一产品必须满足某一技术规格的下限时(如≥70g),应将该控制系统的设定值设置在该下限的上面2倍标准差的位置(如71.96g )。当某一产品必须满足某一技术规格的上限时(如含水量≤5 % ) ,则应将该控制系统的设定位设置在该上限的下面2倍标准差的位置(如4%)。减小控制系统的标准差,不仅能降低原料消耗和成本,同时能增加生产能力,获得更多产品。
在相同干扰作用下,定值控制系统输出的最大偏差越大,系统的偏离度越大;在相同的衰减比下,系统输出的周期越大,系统的偏离度越大。
1.1.
2.2积分性能指标
除了上述单项性能指标外,也常采用综合性能指标,即偏差的积分性能指标。积分性能指标常用于分析系统的动态响应性能。常用的积分鉴定指标如下。
(1)误差平方积分鉴定指标ISE (Integral of the Squared Error )
ISE=?∞
02)(dt t e (1-16) 该积分鉴定指标的缺点是会产生有振荡的响应,为此,可采用改进的ISE 指标[见式[( l-17)]。
ISE mod =[]
d t t
e t e t e ?∞++0232221)()()( ωωω (1-17) (2)绝对误差积分鉴定指标 IAE (Integral o
f the Absolute Value of Error ) IAE=?∞
0)(dt t e (1-18) 该积分鉴定指标的缺点是最小系统误差的确定有困难。
(3)时间乘绝对误差积分鉴定指标 ITAE ( Integral of the Time by Absolute Value of Error ) ITAE=?∞
0)(dt t e t (1-19) 该积分鉴定指标是最常用的积分鉴定指标。通常,该积分鉴定指标最小的系统具有较好的响应和性能指标。但该积分鉴定指标的解析解不易获得。
不同积分性能指标对控制系统优良程度的侧重点不同。例如,ISE 指标的重点是抑制输出中的大偏差,但系统的衰减比可能较大;ITAE 指标的重点是抑制回复时间过长,但系统的振荡可能较激烈等。
对存在余差的控制系统,由于余差不为零,因此,积分指标将趋于无穷大,这时,可用[])()()()(∞--=∞-y t y e t e 代替偏差项进行积分计算。
1.1.
2.3 控制系统正常运行的重要准则
控制系统正常运行的重要准则有负反馈准则和稳定运行准则。
①负反馈准则 控制系统成为负反馈的条件是该控制系统各开环增益之积为正。
② 稳定运行准则 在扰动或设定变化时,控制系统静态稳定运行条件是控
制系统各环节增益之积基本不变;控制系统动态稳定运行条件是控制系统总开环传递函数的模基本不变。
1. 2 过程动态特性和建立过程的动态模型
1. 2. 1 过程动态特性
1.2.1.1 典型过程动态特性
工业生产过程的数学模型有静态和动态之分。静态数学模型是过程输出变量和输入变量之间不随时间变化时的数学关系。动态数学模型是过程输出变量和输人变量之间随时间变化时动态关系的数学描述。过程控制中通常采用动态数学模型,也称为动态特性。建立控制系统中各组成环节和整个系统的数学模型不仅是分析和设计控制系统方案的需要,也是控制系统投运、控制器参数整定的需要,它在操作优化、故障检测和诊断、操作方案制定等方面也是极其重要的。对所建立数学模型的要求随实际应用的不同而不同。例如,用于先进控制、在线控制的数学模型要有较高的精确度,而简单控制系统中数学模型的精确度就要低得多。对所建模型的基本要求是力求简单实用、在满足控制精确度的条件下能正确可靠地反映过程输入和输出之间的动态关系。
按时间特性,过程动态数学模型可分为连续和离散两大类;按模型描述,可分为传递函数、状态空间、微分方程和差分方程等模型;按过程类型,可分为集中参数、分布参数和多级过程模型等;按建模的输入信号,可分为非周期函数、周期函数、非周期性随机函数和周期性随机函数建立的模型等。工业生产过程中常采用阶跃输入信号作用下过程的响应表示过程的动态特性。
以阶跃响应分类,典型的工业过程动态特性分属下列四类。
②自衡的非振荡过程
这是一大类在工业生产过程中最常见的过程。该类过程在阶跃输入信号作用下的输出响
应曲线没有振荡地从一个稳态趋向于另一个稳态。图1-7所示为该类过程典型的输出响应曲线。
图1-7 自衡非振荡过程的阶跃响应
过程能自发地趋于新稳态值的特性称为自衡性。在外部阶跃输人信号作用下,过程原有平衡状态被破坏,并在外部信号作用下自动地非振荡地稳定到一个新的稳态,这类工业过程称为具有自衡的非振荡过程。用自衡率P 表示过程的自衡能力,它等于自衡特性过程增益K 的倒数。
例如,液位储罐在进料阀开度增大时,原来的稳定液位会上升,由于出料阀
开度未变,随着液位的升高,静压增大,出料流量也增大,因此,液位上升逐渐变慢,直到液位达到一个新的稳定位置。
具有自衡非振荡过程的特性可用下列类型的传递函数描述。
具有时滞的一阶环节 τs e Ts K s G -+=1
)( (1-20) 具有时滞的二阶非振荡环节 τs e s T s T K s G -++=)
1)(1()(21 (1-21) 第一种形式是最常用的。其中,K 是过程的增益或放大系数;T 是过程的时间常数;τ是过程的时滞。
过程增益K 计算公式 r
y y K )0()(-∞= (1-22) 式中,y(∞)和y(0)分别是输出的新稳态值和原稳态值,r 是阶跃信号的幅值。 过程的时间常数T 和时滞τ可用多种方法获得。例如,直接从响应曲线的拐点作切线,如图1-8 所示读取,但因拐点的确定和切线的斜率不易正确确定,因此,常用两点法和曲线拟合法。
图1-8切线法与曲线拟合的结果
② 两点法 根据阶跃输入信号作用下输出响应曲线的计算公式(1-23 )。
)1()(T t r e K t y τ
---= (1-23)
在响应曲线上取两点 A (t 1, y 2)和 B (t 2, y 2) ,由于阶跃幅值 r 已知,联立求解得
2
112M M t t T --= 2
12112M M M t M t --=τ (1-24) 式中,)1ln(11r K y M -=;)1ln(22r
K y M -=。为了反映过程的动态特性,输出响应曲线上的两点通常可取表1-2中的配对点,并据此计算时间常数和时滞。
表1-2 具有时滞一阶环节常用的配对点和计算公式
② 曲线拟合法 曲线拟合法可采用计算机和相关的软件实现。例如,在 MATLAB 平台上采用非线性最小二乘法的lspcurvefit 函数实现。图1-8也显示了经曲线拟合法获得的拟合曲线。由于曲线拟合法的精确度高,加上计算机的普及、MATLAB 计算平台应用的熟练等,曲线拟合法正被广大过程技术人员接受并得到正确应用。
(2)无自衡的非振荡过程
该类过程没有自衡能力,它在阶跃输入信号作用下的输出响应曲线无振荡地从一个稳态一直上升或下降,不能达到新的稳态。
例如,某些液位储罐的出料采用定量泵排出,当进料阀开度阶跃变化时,液位会一直上升到溢出或下降到排空。
具有无自衡非振荡过程的特性可用下列类型的传递函数描述。
具有时滞的积分环节
τs e s
K s G -=)( (1-25) 具有时滞的一阶和积分串联环节 τs s e s
T K s G -+=
)1)( (1-26) 这类过程的响应如图 1-9 所示。
图1-9 无自衡的非振荡过程
该过程的增益K 由输出响应曲线的斜率确定。过程输出响应曲线的渐进线下时间轴交点处的时间是时间常数T 和时滞τ之和。其中,响应曲线在初始段没有发生变化的时间是时滞τ。
除了采用图解法确定传递函数的有关参数外,也可采用曲线拟合法,但由于输出变量y 的时域表达式与前述自衡非振荡过程的时域表达式不同,
因此,在使用MATLAB 的非线性最小二乘法进行曲线拟
合时,使用的拟合函数也不同。
虽然在阶跃信号作用下无自衡的非振荡过程会不稳定,但组成闭环后,控制系统可以稳定,在第2.2节将对此进行讨论。
(3)自衡的振荡过程
该类过程具有自衡能力,在阶跃输入信号作用下,输出响应呈现衰减振荡特性,最终过程会趋于新的稳态值。图1-10所示为这类过程的阶跃响应。
图1-10 自衡振荡过程的阶跃响应
工业生产过程中这类过程不多见。它具有位于s 左半平面的共扼复极点, 其传递函数形式如下。
τωξωs e s s K
s G -++=222)(,(0<ξ<1) (1-27)
根据响应曲线的衰减比和振荡频率可以确定过程的阻尼比ξ和频率ω,根据输出的新稳态值和原始稳态值及阶跃的幅值可以确定过程的增益 K ,过程的时滞τ可根据响应曲线初始段没有发生变化的时间确定。在光盘中提供了直接进行参数估计的曲线拟合法程序。
(4)具有反向特性的过程
该类过程在阶跃输入信号作用下开始与终止时出现反向的变化。 即有
K>0
或K<0
(1-28)
这类过程具有位于s 右半平面的零点。它有自衡和无自衡两种类型,可表示为两个环节的差,即G(s)=G 1(s)-G 2(s)。其中,1)(111+=
s T K s G ;G 2(s )根据类型确定如下。
自衡型 1
)(222+=s T K s G 无自衡型 s K s G 22)(=
因此,该类过程的传递函数为
自衡型 τs d e s T s T s T K s G -++-=)
1)(1()1()(21 (1-29) 无自衡型 τs d e s s T s T K s G -+-=
)1()1()(1 (1-30) 式中,T d >0。
该类过程的阶跃响应曲线如图1-11所示(图中 , K>0)。这类过程的典型例子是锅炉水位。当蒸汽用量阶跃增加时,引起蒸汽压力突然下降,汽包水位由于水的闪急汽化,造成虚假水位上升,但因用汽量的增加,最终,水位反而下降。这类过程由于控制器根据水位的上升会做出减少给水量的误操作,因此,控制这类过程最为困难。
图1-11 反向特性过程的阶跃响应
1.2.1.2 过程特性对控制性能指标的影响
下面讨论自衡的非振荡过程特性对控制性能指标的影响。其他类型的过程对控制性能指标的影响可作类似分析。
为使讨论具有广泛性,假设过程特性是广义对象的动态特性,从控制系统组成可以看到,控制系统有两个通道,即控制通道和扰动通道。因此,两个通道的过程特性在此分别讨论。 设各通道传递函数为
01)(000τs e s T K s G -+= ; f
s f f f e s T K s G τ-+=1)(
(1) 增益的影响
①控制通道增益的影响 简单控制系统如图1-12所示,以定值控制系统为例讨论。
图1-12过程特性对性能指标的影响
定值控制系统中,R(s)=0;设阶跃干扰幅值为F ,控制器增益K 。不变,根据终值定理,计算出新稳态值、余差和最大偏差分别如下。
稳态值 0
01)()(l i m )(K K F K s F s F s Y s y c f s +=?=∞→ (1-31) 余差 01)()(K K F
K y e c f +-=∞-=∞ (1-32)
最大偏差 )11(1)1exp(11020n K K F K K K F
K A c f c f ++=???
?????--++=ξξπ (1-33) 可见,随着过程增益K 。的增加,余差减小,最大偏差减小,控制作用增强,但稳定性变差。也可从图1-13所示的根轨迹图看到,随着增益的增加,根轨迹向虚轴移动,因此,振荡频率增大,回复时间增大,衰减比减小。图1-14所示为随动控制系统在设定值单位阶跃变化时,不同过程增益对控制系统的影响。
图1-13自衡非振荡过程的根轨迹 图1-14 设定阶跃时的输出响应
在其他因素相同的条件下,如果过程增益K 0越大,则控制作用就越大,克服扰动的能力也越强。
②扰动通道增益的影响 从式(1-31)和式(1-32)可见,在其他因素相同的条件下,K f F 越大,余差越大,最大偏差越大。
(2)时间常数的影响
①控制通道时间常数的影响 在时滞τ0与时间常数T 0之比不变的条件下进行讨论。
控制系统的闭环特征方程为
0)
1(1)()(10000=++
=+-τs c c e s T K K s G s G (1-34) 相位条件 πωωτπωωτ-=--?-=--)arctan()()arctan(0000
00T T T T (1-35)
若τ0/T 0固定,则相位条件T 0ω不变,对稳定性没有影响。
若τ0/T 0固定,时间常数 To 大,则为使稳定性不变,ω应减小,因此,时间常数大时,为保证系统的稳定性,振荡频率减小,回复时间变长,动态响应变慢。反之,若τ0/T 0固定,时间常数T 0小,则振荡频率增大,回复时间变短,动态响应变快。换言之,时间常数越大,过渡过程越慢,系统越易稳定。
②扰动通道时间常数的影响 扰动通道时间常数T f 大,扰动对系统输出的影响缓慢,有利于通过控制作用克服扰动的影响,因此,控制质量提高。T f 小,扰动作用快,对系统输出的影响也快,控制作用不能及时克服扰动。
如果不考虑时滞τ0和τf ,则有
s
T s T s T K K K s F s Y f c f ++?++=111)()(000 (1-36) 当10>f
T T 时,扰动对系统输出有微分作用,使控制品质变差;当10 (3)时滞的影响 ①控制通道时滞的影响 时滞τ0的存在使控制系统的频率特性变化,如图1-15所示。 图 1-15 控制通道时滞的影响 当检测变送环节存在时滞时,被控变量的变化不能及时传送到控制器;当被控对象存在时滞时,控制作用不能及时使被控变量变化;当执行器存在时滞时, 控制器的信号不能及时引起操纵变量的变化。因此,开环传递函数存在时滞,使控制不及时,超调增大,并引起系统不稳定。 用τ0/ T 0反映时滞的相对影响。通常,τ0/T 0≤0.3时,系统尚可用简单控制系统进行控制,当τ0/T 0>0.3时,应采用其他控制方案对该类过程进行控制。因此,在设计和应用时应尽量减小时滞,有时可增大时间常数以减小τ0/T 0。 ②扰动通道时滞的影响 时滞τf 的存在不影响系统闭环极点的分布.因此,不影响系统稳定性。它仅表示扰动进入系统的时间先后,即不影响控制系统控制品质。 (4)扰动进入系统位置的影响 进入系统的扰动位置远离被控变量,等效于扰动通道传递函数中的时间常数增大,因此,与扰动通道时间常数的影响相似。但如果等效增益K f 增大则应根据K f F 确定其影响。 (5)时间常数匹配的影响 当广义对象传递函数有多个时间常数时(T 01 > T 02 >T 03>…> T 0n ) ,各时间常数的匹配对控制系统有影响。例如,广义对象由执行器、对象和检测变送环节组成,三部分的时间常数对控制品质的影响常采用可控性指标衡量。可控性指标K m ωc 是控制系统临界增益K m 与临界振荡频率ωc 的乘积。可控性指标大表示系统的可控性好。 例1-2 三阶系统的可控性分析。 设广义对象由三阶环节组成,即 )1)(1)(1()(0302010+++= s T s T s T K s G ;控制器增益为K c 。则 临界增益 )2(102 03030201030301010202010T T T T T T T T T T T T K K K c m ++++++= (1-37) 临界振荡频率 03 020*******T T T T T T c ++=ω (1-38) 设 K 0K c =1;三组不同时间常数配对时的可控性指标见表1-3。 表1-3 不同时间常数配对时的可控性指标 可见,减小最大时间常数T 01,虽然提高了临界振荡频率,但降低了临界增益,因此,并不能提高系统的可控性指标;而减小次大的时间常数,或增大最大时间常数与次大时间常数之比则有利于提高系统的可控性指标。 (6)被控变量和操纵变量的选择 根据上述分析,得到被控变量的选择原则。 ①深人了解工艺过程,选择能够反映工艺过程的被控变量; ②尽量选用易于测量且关系简单的直接质量指标作为被控变量; ③控制通道的K0尽量大。即选择能超越设备能力和操作约束的过程输出变量作为被控变量; ④过程的τ0/T0应尽量小; ⑤过程的T0/T f应尽量小; ⑥被控过程的参数在运行过程中的变化应尽量小; ⑦扰动进入系统的位置应尽量远离被控变量。 操纵变量的选择原则: ①选择对被控变量影响较大的操纵变量,即K0尽量大; ②选择对被控变量有较快响应的操纵变量,即过程的τ0/T0应尽量小; ③选择对被控变量有直接影响的操纵变量,而不采用间接影响的操纵变量。例如,在精馏塔的控制中采用影响直接质量指标的操纵变量等; ④过程的T0/T f应尽量小; ⑤使过程的K f F尽量小; ⑥工艺的合理性与动态响应的快速性应有机结合。 控制方案的选择原则: ①在满足工艺控制要求的前提下,控制方案应尽量简单实用; ②应考虑扰动的变化频度和变化的幅度,例如,可选择前馈控制等; ③应考虑过程的动态特性、易控程度等,对反向特性或τ0/T0较大的过程应 采用特殊的控制规律或较复杂的控制结构; ④使各控制系统之间的关联尽量小。 例1-3变换炉操纵变量的选择。 合成氨生产中,一氧化碳变换过程在变换炉内进行。变换炉内进行煤气与蒸汽的变换反应,反应物有氢气和二氧化碳。一氧化碳的变换率是直接质量指标,但不易检测,因此,常采用变换炉温度作为被控变量,间接反映变换率。主要扰动有:煤气量、煤气压力、煤气温度、煤气成分、蒸汽量、蒸汽压力、变换炉中部的冷激水流量、触媒活性等。主要操纵变量可选冷激水流量、蒸汽量和煤气量。某变换炉实测结果为:冷激水流量对变换炉温度的增益为0.8;蒸汽量对变换炉温度的增益为0.48;煤气量对变换炉温度的增益为0.31 。因此,选择绝对值较大(K0=-0.8)的冷激水流量作为操纵变量。 1.2.2 过程动态模型的建立 1.2.2.1 对过程模型的要求 建立过程动态模型的目的是用于过程控制系统的设计、分析,用于新的控制系统的开发和研究。在现代控制理论得到广泛应用的今天,建立过程动态模型更显必要。 对过程模型的要求是正确、可靠和简单。模型应正确反映过程的主要特征,如果误差过大,则导致错误结论。模型应可靠,这表明模型具有复现性,能较长期地反映过程的主要特征。模型应简单,使模型能方便地被用于指导过程控制策略的计算,能容易地被用于实施和易于对模型参数的估计等。 1.2.2.2 过程模型建立的方法 建立过程动态模型的方法可分为三类,建立的模型分别称为黑箱模型、白箱模型和灰箱模型。 (1)系统辨识方法 根据过程输入输出数据确定过程模型的结构和参数的建模方法称为系统辨识方法,建立的模型称为黑箱模型。根据所建立模型的参数不同,系统辨识方法可分为非参数模型辨识和参数模型辨识两类方法。上面介绍的四类过程特性是用非参数模型辨识方法建立的模型,这类模型通常用非参数的形式表示,例如,用阶跃响应曲线表示过程特性,非参数模型的过程特性参数可用曲线拟合法估计。参数模型辨识方法根据输入输出数据用参数估计的方法确定参数模型中的有关参数值。参数模型指用有限参数描述的过程模型。常用的参数模型有自回归模型(AR 模型)、扩展自回归模型(ARX 模型)、扩展自回归滑动平均模型(ARMAX 模型)、BJ 模型和输出误差模型等。参数估计的方法有最小二乘法(LS)及其改进的方法,例如广义最小二乘法(GLS)、最大似然法(ML)和仪表变量法(IV)、两步法(CORLS)等。 系统辨识方法不需要过程的先验知识,但建立的模型不具有放大功能,即不能类推到不同型号的放大设备或过程中。 (2)机理建模方法 根据过程的内在机理,应用物料平衡、能量平衡和有关的化学、物理规律建立过程模型的方法是机理建模方法,又称为过程动态学方法。建立的模型称为白箱模型。建立机理模型的方法如下。 ①列写基本方程,如物料平衡和能量平衡方程等。 ②消去中间变量,建立状态变量x 、控制变量u和输出变量y 的关系。 ③增量化。在工作点处对方程进行增量化,获得增量方程。 ④线性化。在工作点处进行线性化处理,简化过程特性。 ⑤列写状态和输出方程 例1-4建立串接液位储罐过程机理模型。 图1-16 是串接液位储罐的示意图。 图1-16 串接液位储槽 其中,各储罐截面积分别为A1和A2;液位高度分别为h1和h2;阀门阻力为R1和R2;流入储罐1的流量为Q i;流出储罐1 的流量为Q12 ;流出储罐2 的流量为Q0。建立过程动态模型的步骤如下。 ①列写基本方程根据物料平衡关系,得到 dt dh A Q Q i 1112=- (1-39) df dh A Q Q 22012=- (1-40) ②消去中间变量 过程输入变量为流入储罐1的流量Q i 及两个阀门的开度,输出变量为两个液位高度h 1和h 2 ,中间变量是Q 12和Q 0 ,为此,应消去中间变量。假设流量12112R h h Q -= ,2 20R h Q =代入式(1-39)和式(1-40)得到 dt dh A R h h Q 11121=-- (1-41) dt dh A R h R h h 2222121=-- (1-42) ③增量化 假设所建过程动态模型的输入和输出分别是Q i 、R 2和h 1、h 2。则工作点处R 1和R 2分别用R 10和R 20表示稳态值,对上述方程进行增量化,获得增量方程如下。 dt h d A R h h Q 111021?=?-?-? (1-43) dt h d A R h R h h 22221021?=??? ? ???-?-? (1-44) ④线性化 由于R 2和h 2均为变量,因此,应在工作点处线性化,即有 22022022022R R h h R R h ?-?=??? ? ??? (1-45) 式(1-44)经线性化后成为 dt h d A R R h h R R h h 22220 2202201021?=?-?-?-? (1-46) ⑤列写状态和输出方程 经合并和整理,得到该串接液位储罐的状态方程为 BU AH H += (1-47) 式中 。;;;????????=????????????=???????????????? ??+--=??????=2220220120222210110 12100 11110111R Q U R A h A B R A R A R A R A R A A h h H i 也可列写传递函数。例如,操纵变量Q i 对被控变量h 2的传递函数为 1 )()()(2012021012201021202++++=s R A R A R A s R R A A R s Q s H 上式说明用流人量控制第2储罐液位的过程是二阶过程。其他通道的传递函数可类似地获得。 机理建模方法完全需要验前知识,一旦模型建立,它能适用于不同尺寸的设备,具有放大能力,并可在工艺过程设计前完成模型的建立。由于实际工业过程较复杂,故机理建模应用较少。 (3) 混合方法 介于上述两种方法之间的建模方法,称为混合方法。所得模型称为灰箱模型。 1 . 3 检测变送环节 1.3.1 检测变送环节的性能 检测变送环节的作用是将工业生产过程的参数(流量、压力、温度、物位、成分等)经检测、变送单元转换为标准信号。在模拟仪表中,标准信号通常采用 4~20mA 、1~5V 、 0~10mA 电流或电压信号,20~100kPa 气压信号;在现场总线仪表中,标准信号是数字信号。图1-17是检测变送环节的工作原理。 图1-17 检测变送环节工作原理 检测元件和变送器的类型繁多,现场总线仪表的出现使检测变送器呈现模拟和数字并存的状态。但它们都可用时滞的一阶环节近似。其传递函数为 m s m m m e s T K s G τ-+=1 )( (1-48) 式中, K m 、T m 和τm 分别是检测变送环节的增益、时间常数和时滞。 检测元件和变送器的基本要求是准确、迅速和可靠。准确指检测元件和变送器能正确反映被控或被测变量,误差应小;迅速指应能及时反映被控或被测变量的变化;可靠是检测元件和变送器的基本要求,它应能在环境工况下长期稳定运行。 由于检测元件直接与被测或被控介质接触,因此,在选择检测元件时应首先考虑该元件能否适应工业生产过程中的高低温、高压、腐蚀性、粉尘和爆炸性环境;能否长期稳定运行;其次,应考虑检测元件的精确度和响应的快速性等。除 了这些选择检测元件和变送器的要求外,还应考虑检测元件和变送器的线性特性等。 仪表的精确度影响检测变送环节的准确性。应合理选择仪表的精确度.以满足工艺检测和控制要求为原则。检测变送仪表的量程应满足读数误差的精确度要求,同时应尽量选用线性特性。由于K m在反馈通道,因此,在满足系统稳定性和读数误差的条件下,K m较小,有利于增大控制器的增益,使前向通道的增益增大,即有利于克服扰动的影响。 检测元件和变送器增益K m的线性度与整个闭环控制系统输人输出的线性度有关,当控制回路的前向增益足够大时,整个闭环控制系统输入输出的增益是K m的倒数。例如,采用孔板和差压变送器检测变送流体的流量时,由于差压与流量之间的非线性,造成流量控制回路呈现非线性,并使整个控制系统开环增益非线性。 绝大多数检测变送环节的增益是正值,但在采用如图1-18所示连接的不作迁移差压变送器检测变送液位时,该增益为负值。 图1-18液位检测变送(不作迁移) 选择合适的测量范围可改变检测变送环节的增益。 相对于过程的时间常数,大多数检测变送环节的时间常数是较小的。但成分检测变送环节的时间常数和时滞会很大;气动仪表的时间常数较电动仪表要大;采用保护套管温度计检测温度要比直接与被测介质接触检测温度有更大的时间常数。此外,应考虑时间常数随过程运行而变化的影响。例如,由于保护套管结垢,造成时间常数增大,保护套管磨损,造成时间常数减小等。对检测变送环节时间常数的考虑主要应根据检测变送、被控对象和执行器三者时间常数的匹配,即增大最大时间常数与次大时间常数之间的比值。 减小时间常数的措施包括检测点位置的合理选择;选用小惯性检测元件;缩短气动管线长度,减小管径;正确使用微分单元;选用继动器等放大元件等。为了增大最大时间常数与次大时间常数之间的比值,对于快速响应的被控对象,例如流量、压力等,有时需要增大检测变送环节的时间常数,常用的措施有合理选用微分单元(反微分);并联大容量的电容或气容;串联阻容滤波环节等。 检测变送环节中时滞产生的原因是检测点与检测变送仪表之间有一定的传输距离l,而传输速度ω也有制约,因此,产生时滞 τm=l/ω (1-49) 传输速度ω并非被测介质的流体流速。例如,孔板检测流量时,流体流速是流体在管道中的流动速度,而检测元件孔板检测的信号是孔板两端的差压。因此,检测变送环节的传输速度是差压信号的传输速度,对于不可压缩的流体,该信号的传输速度是极快的。但对于成分的检测变送,由于检测点与检测变送仪表之间 读国学经典心得体会 读国学经典心得体会(一) 在学习第三模块的过程中,我接触到了《孔子与儒家思想》《老子与道德经》《唐宋诗词》《红楼梦与红学》等七部国学经典,虽然学习时间不长、断断续续,但觉着收获很多。国学经典不仅是中国悠久传统文化的证明,也是每一个中国人 的立身处世之本,更是我们园长不可或缺的精神力量。现根据个人学习情况谈两 点体会: 一、学习国学可以提高自身素养 经典的力量能震撼人心,它能启迪思想,开阔文化视野。“修身、齐家、治国、平天下。”修身是一切的根本,欲修其身,先要获得完善的知识,只有用知 识武装自己,完善自己,提升自己的德行,才能再谈家国天下。正所谓千里之行 始于足下,再远大的理想,再美好的打算,在没有实现之前一定要先把眼前的做好。知识能够让自己知道自身的不足之处从而去完善。作为园长,我们除了在能力、知识方面外,还应注重自己的表率作用。一个园长的权威,说到底就是"权 力+人格"。尽管园长不是官,是教育家,是学者,但是园长要想管理好幼儿园, 就要真正地为教职工办实事,善于听取来自各方面的不同意见和建议,集思广益。 二、学习国学可以提升幼儿园的管理水平 “入则孝,出则弟”。孝敬父母,尊重兄长对幼儿园的孩子来说是首先应该 具备的品质。为此,我镇组织了对幼儿进行爱心、孝心教育的活动。包括听父母 的话,尊敬父母和其他长辈,关心体贴父母,做力所能及的劳动,珍惜父母的劳 动成果,热爱学习,与家人共同创造和谐快乐的生活。 首先制定了幼儿文明礼貌、爱心、孝心细则,并发放到家长手中,让孩子在 园在家对照执行。其次充分利用本土文化,营造“孝”的文化氛围。加强校园文 化建设,提供与教育相适应的,具有“孝”文化特色的、富有童趣的室内外环境,形成有利于幼儿身心健康和谐发展的教育氛围。三是围绕“孝心献给父母”进行 了一系列德育活动。 (1)利用重大节日、生日音乐会等举行各种形式的亲子活动,对幼儿进行感 恩教育。 (2)要求幼儿在一周内听一个“孝”的故事、“爱”的歌曲、“为父母做一 项洗刷家务”、“帮父母做一种农活”、“给父母做一回健康服务”等。使幼儿 学有榜样,爱有行动,真实的感受父母养育之恩,有效的培养孩子关爱家庭、孝 敬父母的优良品质。 (3)做小小“孝子”。组织幼儿开展“我自己进教室”、“我是妈妈的小乖乖”等幼儿活动,让幼儿通过演一演、做一做、说一说等形式,学会孝敬爸爸妈妈,养成良好的习惯。 (4)评“孝”星。通过一定阶段的活动后,组织幼儿及家长召开家园联谊会,由教师、家长、幼儿沟通参与为每个幼儿以打星的方式评出最佳“孝”星,进行 表彰奖励。让每个孩子都享受到成长的快乐。 学习国学的心得体会5篇心得体会,学习心得学习了国学经典后,我认为还 可以在我们的活动中加入经典诵读,如《弟子规》《唐宋诗词》《三字经》等适合幼儿诵读的经典;其次让我们的环境与经典对话,收集有关宣传资料、图片、布 置幼儿园的环境、氛围;三是利用传统节日对幼儿进行渗透教育。如春节、元宵节、清明节、端午节、中秋节、重阳节等,每个节日的由来、庆祝方式、各地风 俗习惯等内容,让幼儿在接受传统文化知识的同时形成良好的行为习惯及个性品质,促进幼儿园特色办园。 电气工程师的好东东 工程师应该掌握的20个模拟电路对模拟电路的掌握分为三个层次。 初级层次是熟练记住这二十个电路,清楚这二十个电路的作用。只要是电子爱好者,只要是学习自动化、电子等电控类专业的人士都应该且能够记住这二十个基本模拟电路。 中级层次是能分析这二十个电路中的关键元器件的作用,每个元器件出现故障时电路的功能受到什么影响,测量时参数的变化规律,掌握对故障元器件的处理方法;定性分析电路信号的流向,相位变化;定性分析信号波形的变化过程;定性了解电路输入输出阻抗的大小,信号与阻抗的关系。有了这些电路知识,您极有可能成长为电子产品和工业控制设备的出色的维修维护技师。 高级层次是能定量计算这二十个电路的输入输出阻抗、输出信号与输入信号的比值、电路中信号电流或电压与电路参数的关系、电路中信号的幅度与频率关系特性、相位与频率关系特性、电路中元器件参数的选择等。达到高级层次后,只要您愿意,受人尊敬的高薪职业--电子产品和工业控制设备的开发设计工程师将是您的首选职业。 一、桥式整流电路 1、二极管的单向导电性: 2、桥式整流电流流向过程: 输入输出波形: 3、计算:Vo, Io,二极管反向电压。 二、电源滤波器 1、电源滤波的过程分析: 波形形成过程: 2、计算:滤波电容的容量和耐压值选择。 三、信号滤波器 1、信号滤波器的作用: 与电源滤波器的区别和相同点: 2、LC串联和并联电路的阻抗计算,幅频关系和相频关系曲线。 3、画出通频带曲线。 计算谐振频率。 一、微分和积分电路 1、电路的作用,与滤波器的区别和相同点。 2、微分和积分电路电压变化过程分析,画出电压变化波形图。 3、计算:时间常数,电压变化方程,电阻和电容参数的选择。 二、共射极放大电路 1、三极管的结构、三极管各极电流关系、特性曲线、放大条件。 2、元器件的作用、电路的用途、电压放大倍数、输入和输出的信号电压相位关系、交流和直流等效电路图。 3、静态工作点的计算、电压放大倍数的计算。 三、分压偏置式共射极放大电路 摘要 随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的,主要解决有一定精度的位置跟随问题,如数控机床的刀具给进和工作台的定位控制,工业机器人的工作动作,导弹制导、火炮瞄准等。在现代计算机集成制造系统(CIMC)、柔性制造系统(FMS)等领域,位置随动系统得到越来越广泛的应用。 位置随动系统要求输出量准确跟随给定量的变化,输出响应的快速性、灵活性和准确性为位置随动系统的主要特征。 本次课程设计研究的是位置随动系统的超前校正,并对其进行分析。 关键词:随动系统超前校正相角裕度 目录 1 位置随动系统原理 (1) 1.1 位置随动系统原理图 (1) 1.2 各部分传递函数 (1) 1.3 位置随动系统结构框图 (4) 1.4 位置随动系统的信号流图 (4) 1.5 相关函数的计算 (4) 1.6 对系统进行MATLAB仿真 (5) 2 系统超前校正 (6) 2.1 校正网络设计 (6) 2.2 对校正后的系统进行Matlab仿真 (8) 3 对校正前后装置进行比较 (9) 3.1 频域分析 (9) 3.2 时域分析 (9) 4 总结及体会 (10) 参考文献 (12) 位置随动系统的超前校正 1 位置随动系统原理 1.1 位置随动系统原理图 图1-1 位置随动系统原理图 系统工作原理: 位置随动系统通常由测量元件、放大元件、伺服电动机、测速发电机、齿轮系及绳轮等组成,采用负反馈控制原理工作,其原理图如图1-1所示。 在图1-1中测量元件为由电位器Rr 和Rc 组成的桥式测量电路。负载固定在电位器Rc 的滑臂上,因此电位器Rc 的输出电压Uc 和输出位移成正比。当输入位移变化时,在电桥的两端得到偏差电压ΔU=Ur-Uc ,经放大器放大后驱动伺服电机,并通过齿轮系带动负载移动,使偏差减小。当偏差ΔU=0时,电动机停止转动,负载停止移动。此时δ=δL ,表明输出位移与输入位移相对应。测速发电机反馈与电动机速度成正比,用以增加阻尼,改善系统性能。 1.2 各部分传递函数 (1)自整角机: 作为常用的位置检测装置,将角位移或者直线位移转换成模拟电压信号的幅值或相位。自整角机作为角位移传感器,在位置随动系统中是成对使用的。与指令轴相连的是发送机,与系统输出轴相连的是接收机。 12()(()())()u t K t t K t εεθθθ=-=? (1-1) 零初始条件下,对上式求拉普拉斯变换,可求得电位器的传递函数为 国学经典诵读心得体会作文 《国学经典诵读》这本书,内容丰富,题材广泛,有名言,古诗词,经典故事,我觉 得这本书特别适合我们小学生阅读,因为每首古诗都有注释,文章还配有插图,所以它不 仅使繁冗的文句变得浅显易懂,而且生动有趣,更能让我们深刻的读懂文章的内涵,这不 正是我们所喜欢的愉快阅读吗? 一、国学让我学会自信 这本书中,我最喜欢的是“自信不疑”这一单元,它用许多的古代寓言和成语故事, 以及古诗来教育我们:人要树立起自信心,失败了不能气馁,从哪里跌倒就从哪里爬起。 读了之后,我受启发很大,我本身是一个胆小的人,处处都爱面子,竞选班干部时,我很 想当,但又怕落选,结果看到别人当选之后那开心的样子,我心里却很不是滋味,哎,都 怪我自信心不足,怕失败啊,从今以后,我一定要胆大起来,自己想做什么就大胆去做, 因为只有相信自己是最棒的,才敢去尝试,才能做得更好! 阅读时,我还积累了不少的名言、成语,如“天生我才必有用”,“见贤思齐焉,见 不贤而自省也”,“知人者智,自知者明”,“胸有成竹”、“果于自信”、“舍我其谁”、“集思广益”等,这些对我们拓宽知识,,提高写作都有很大帮助,同学们以后可 要多多积累哟! 二、国学让我学会感恩 子曰:“弟子,入则孝,出则悌,谨而信,泛爱众而亲仁。行有余力,则以学。”这 句话的意思是说:孔子说:“学生在家里孝顺父母,在外要敬爱兄长,做事谨慎而诚实,博 爱众人,而亲近仁德的人,躬行实践之后有剩余的力量,再去学习《诗》《书》等经典。” 通过学习国学,我明白了许多人生道理,如对自己的父母应该以感恩的心去对待;对有困难 的人,应该从乐于助人的心去对待;对犯错的人应该以宽容的心去对待……在一切日常生 活言语行为中,要小心谨慎,要讲信用。孩子从小就被教育要讲礼貌,尊敬长辈等。它在 教我如何做善良的人、做一个孝顺父母的人、做一个有礼貌的人。可以说,国学知识里面 对人生道理仿 佛是指明人生方向的一个指南针,在我看不清前方时,为我拨开眼前的迷雾,为我指 出正确的方向。 茫茫书海,好书难求,愿《国学经典诵读》这样的好书多起来,也愿读这样好书的读 者多起来,好处多多,同学们,快快行动吧! 教师评语:老师希望你多读这样的好书,拓宽知识,丰富视野,陶冶情操,提高写作。 谈到国学经典,我心十分澎湃,所谓国学,就是一国之所术也,这也必然与我们的古 圣先贤紧密相关。 控制系统典型环节性能分析 题目: 熟悉Matlab 软件Simulink 的基本使用方法,利用Simulink 建立各典型环节的仿真模型,并通过仿真得到各典型环节的单位阶跃响应曲线,给出各典型环节相关参数变化对典型环节动态性能的影响。 解答: 1.比例环节 1.1比例环节1)(1=s G 图1_1_1 比例环节simulink 仿真模型 图1_1_2 比例环节阶跃响应曲线 1.2比例环节2)(1=s G 图1_2_1 比例环节simulink 仿真模型 图1_2_2 比例环节阶跃响应曲线 分析:比例环节使得输出量与输入量成正比,比例系数越大,输出量越大。 2.积分环节 2.1积分环节s s G 1)(1= 图2_1_1 积分环节simulink 仿真模型 图2_1_2 积分环节阶跃响应曲线 2.2积分环节s s G 5.01 )(2= 图2_2_1 积分环节simulink 仿真模型 图2_2_2 积分环节阶跃响应曲线 分析:积分环节的输出量反映了输入量随时间的积累,时间常数越大,积累速度越快。 3.微分环节 微分环节s s G =)(1 图3_1_1 微分环节simulink 仿真模型 图3_1_2 微分环节阶跃响应曲线 4.惯性环节 4.1惯性环节1 1)(1+= s s G 图4_1_1 惯性环节simulink 仿真模型 图4_1_2 惯性环节阶跃响应曲线 4.2惯性环节1 5.01 )(2+= s s G 图4_2_1 惯性环节simulink 仿真模型 图4_2_2 惯性环节阶跃响应曲线 分析:惯性环节使得输出波形在开始时以指数曲线上升,上升速度与时间常数有关,时间常数越大,上升越快。 5.导前环节 导前环节1)(1+=s s G 图5_1_1 导前环节simulink 仿真模型 图5_1_2 导前环节阶跃响应曲线 分析:比例作用与微分作用一起构成导前环节,输出反映了输入信号的变化趋势,波形也与时间常数有关。 6.振荡环节 6.1振荡环节4 s s 4 )(2 1++= s G (ξ=0.25) 1 一、桥式整流电路2 二、 3 1、二极管的单向导电性: 4 伏安特性曲线: 5 理想开关模型和恒压降模型: 6 2、桥式整流电流流向过程: 7 输入输出波形: 8 3、计算:Vo, Io,二极管反向电压。 9 二、电源滤波器 10 11 1、电源滤波的过程分析: 12 波形形成过程: 13 2、计算:滤波电容的容量和耐压值选择。 14 15 三、信号滤波器 16 1、信号滤波器的作用: 17 与电源滤波器的区别和相同点: 18 2、LC 串联和并联电路的阻抗计算,幅频关系和相频关系曲线。 19 3、画出通频带曲线。 20 计算谐振频率。 21 22 23 24 25 四、微分和积分电路 26 五、 27 六、1、电路的作用,与滤波器的区别和相同点。 28 七、2、微分和积分电路电压变化过程分析,画出电压变化波形图。 29 八、3、计算:时间常数,电压变化方程,电阻和电容参数的选择。 30 九、五、共射极放大电路 31 十、 32 1、三极管的结构、三极管各极电流关系、特性曲线、放大条件。 33 2、元器件的作用、电路的用途、电压放大倍数、输入和输出的信号电34 压相位关系、交流和直流等效电路图。 35 3、静态工作点的计算、电压放大倍数的计算。 36 六、分压偏置式共射极放大电路 37 七、 38 八、1、元器件的作用、电路的用途、电压放大倍数、输入和输出的 39 信号电压相位关系、交流和直流等效电路图。 40 九、2、电流串联负反馈过程的分析,负反馈对电路参数的影响。 41 十、3、静态工作点的计算、电压放大倍数的计算。 42 十一、共集电极放大电路(射极跟随器) 43 十二、1、元器件的作用、电路的用途、电压放大倍数、输入和输出44 的信号电压相位关系、交流和直流等效电路图。电路的输入和输出阻抗 45 十三、特点。 46 十四、2、电流串联负反馈过程的分析,负反馈对电路参数的影响。 47 十五、3、静态工作点的计算、电压放大倍数的计算。 国学经典诵读心得500字作文 记一次《国学经典》诵读比赛为一步弘扬名族传统,传承国学经典引领我校学生,通过诵读国学经典诗词,感受祖国传统文化的博 大精深培养学生热爱祖国,孝敬父母,尊敬师长,勤奋学习,自强 不息的优良品质,学校定于这个星期五举行国学经典诵读比赛。 这天清晨,同学们早早来到教室,个个精神抖擞,背起了弟子规,老师还让我们演练几遍,并叮嘱我们比赛时不要紧张。叮铃铃,上 课铃响了,这也意味着诵读比赛开始了。我们排好队,慢慢走出去。来到阶梯教室门口,我们紧张的等着时间一分一秒的过去。终于, 我听到报号老师叫:“现在是五年级一号班级出场。”我们怀着忐 忑不安的心情进了场。等所有人入场后,只听见沈鹏拿起话筒说完 了总序,接着,全班一起背完了“入则孝”,沈鹏又背起“泛爱众”中的第一排,全班同学有起伏的背完了“泛爱众”,这一章。诵读 完后班长用口令整整队,并向评委敬礼,接着,我班便出场。紧接着,其他班级也进行了诵读比赛。这次比赛,让我知道了一些重要 道理。总序入则孝,出则弟,谨,信,泛爱众,亲仁,余力学文这 八章的内容,我基本能按要求做到,但少数部分仍欠缺,如,父母 讲道理时,嫌??拢?庋?兔蛔龅父母教,须敬听。感谢学校给了我这 好的机会,让我明白,发现了自己的缺点和优点。我一定会发扬优点,改正缺点,做一个品学兼优的好学生。 妈妈给我买了一本《宋词300首》。随手一翻,我发现我家墙上的字画《水调歌头·明月几时有》就在这本书上,一下子就爱不释 手了。天天读,天天背。 刚开始我背的很慢,妈妈见了,便和我一起背。妈妈不愧是大学生,指导背诵很有方法,她让我按词牌名去背。我先背《如梦令》,因为她节奏明快,短小精悍,非常好背。如吴潜的《如梦令·江上 绿杨芳草》:“江上绿杨芳草,想见故园春好。一束海棠花,昨夜 梦魂惊扰。惊晓,惊晓,窗外一声啼鸣。”这首词中“惊晓,惊晓...”的节奏令我大感兴趣。诸如此类的还有“休扫,休扫,管甚 实验一控制系统典型环节的模拟实验 一、实验目的 1.掌握控制系统中各典型环节的电路模拟及其参数的测定方法。 2.测量典型环节的阶跃响应曲线,了解参数变化对环节输出性能的影响。 二、实验内容 1.对表一所示各典型环节的传递函数设计相应的模拟电路(参见表二) 2.测试各典型环节在单位阶跃信号作用下的输出响应。 3.改变各典型环节的相关参数,观测对输出响应的影响。 三、实验内容及步骤 1.观测比例、积分、比例积分、比例微分和惯性环节的阶跃响应曲线。 ①准备:使运放处于工作状态。 将信号发生器单元U1的ST端与+5V端用“短路块”短接,使模拟电路中的场效应管(K30A)夹断,这时运放处于工作状态。 ②阶跃信号的产生: 电路可采用图1-1所示电路,它由“阶跃信号单元”(U3)及“给定单元”(U4)组成。 具体线路形成:在U3单元中,将H1与+5V端用1号实验导线连接,H2端用1号实验导线接至U4单元的X端;在U4单元中,将Z端和GND端用1号实验导线连接,最后由插座的Y端输出信号。 以后实验若再用阶跃信号时,方法同上,不再赘述。 实验步骤: ①按表二中的各典型环节的模拟电路图将线接好(先接比例)。(PID先不接) ②将模拟电路输入端(U i)与阶跃信号的输出端Y相连接;模拟电路的输出端(Uo)接至示波器。 ③按下按钮(或松开按钮)SP时,用示波器观测输出端的实际响应曲线Uo(t),且将结果记下。改变比例参数,重新观测结果。 ④同理得积分、比例积分、比例微分和惯性环节的实际响应曲线,它们的理想曲线和实际响应曲线参见表三。 2.观察PID环节的响应曲线。 实验步骤: 电子工程师应具备的电路设计常识及几十个经典电路解析一、接地技术 PCB设计—接地技术 1、接地设计的基本原理 好的接地系统是抑制电磁干扰的一种技术措施,其电路和设备地线任意两点之间的电压与线路中的任何功能部分相比较,都可以忽略不计;差的接地系统,可以通过地线产生寄生电压和电流偶合进电路,地线或接地平面总有一定的阻抗,该公共阻抗使两两接地点间形成一定的压降,引起接地干扰,使系统的功能受到影响。从而影响产品的可靠性。 2、接地目的 接地的目的主要有三个: ◆接地使整个电路系统中所有单元电路都有一个公共的参考零电位,保证电路系统能稳 定地工作。 ◆防止外界电磁场的干扰。机壳接地可以使得由于静电感应而积累在机壳上的大量电荷 通过大地泄放,否则这些电荷形成的高压可能引起设备内部的火花放电而造成干扰。 另外,对于电路的屏蔽体,若选择合适的接地,也可获得良好的屏蔽效果。 ◆保证安全作。当发生直接雷电的电磁感应时,可避免电子设备的毁坏;当工频交流 电源的输入电压因绝缘不良或其它原因直接与机壳相通时,可避免操作人员的触电事故发生。 3、接地分类 ◆ 防雷接地(LGND) 防雷接地是将可能受到雷击的物体与大地相连。当物体位置较高,距离雷云较近时,一定要将物体进行防雷接地。由于雷电的放电电流是脉冲性的,放电电流也较大,所以防雷接地时的接地电阻要小。为了避免由于雷击而造成机房里设备之间的高压差,特别是有电气连接或距离较近的设备之间要采用低电感和电阻搭接。 ★接地电阻:接地电阻不是普通的电阻而是一个阻值,是指电流由接地装置流向大地再由 大地流向无穷远处或是另一个接地装置所需克服的总电阻。接地电阻包括接 地线、接地装置本身电阻、接地装置与大地之间的接触电阻和两接地装置之 间的大地电阻或接地装置与无线远处的大地电阻。接地电阻越小,当有漏电 流或是雷电电流时,可以将其导入大地,不至于伤害人或损坏设备。如果接 地电阻变大,会造成应该导入大地的电流导不下去,因此,接地电阻越小越 安全。 ◆ 保护接地(PGND/PE/FG) 为了保护设备、装置和人身的安全。保护接地主要用于保护工频故障电压对人身造成的伤害。保护接地的工作原理:一是并联分流,当人体接触故障设备时,如果故障设备有保护接地,这时人体和保护接地线呈并联关系,保护接地线的电阻和人体相比是很小的,所以流过人体的电流很小,就会保护人身安全;二是当设备发生碰壳事件后,由于设备有保护接地,事故电流会使相线上得保护装置动作,从而切断电源,起到保障安全的作用。 ★相线:通常工业用电,三根正弦交流电。电流相位(反映电流的方向 大小)相互相差 读国学经典心得400字五篇 读书心得就是应用自己的话语,把读过的东西,浓缩成简略的文字,然后加以评价,最重要的是提出自己的看法或意见。以下是小编整理的读国学经典心得400字五篇,欢迎阅读参考! 读国学经典心得400字(一) 今天下午我读了《国学经典》这本书里的一篇文章叫《包拯辞官事双亲》。 讲的是包拯是个孝子,包拯考中进士,被授予大理评事,出任建康县知县。但是因为父母老了,走不动了,包拯想时时待在父母身边,便推辞不去。后来又得到监督和州赋税的职务,父母还是不想和他去赴任,于是包拯辞官回去奉养双亲。过了几年父母去世了,包拯在家乡守孝了三年。三年后,还犹豫不忍离去,乡里的人多次劝他,又过了好久他才去做官。 让我感受最深的是:父母在不远游,包拯为了侍奉在父母身边连续两年次拒绝做官,直到父母去世以后他还守孝了三年。 读了这篇文章使我想起了发生在我身边的故事,原来我们全家生活在深圳,由于爷爷奶奶年龄大了,想落叶归根,所以回到了老家。妈妈担心我们便向老板提出辞职,老板三翻五次的挽留,并加工资希望妈妈能留下来,妈妈想到我们依然决定辞掉不错的工作回家。这不正是孝敬父母的表现吗? 通过这两个故事便我明白了我们从小就要帮父母减少负担,做自己力所能及的事。比如:自己穿衣服、帮父母扫地、洗脚等这些小事做起,做个孝敬父母的孩子。 我以后一定要做一个帮父母做事,孝敬父母的好孩子。 读国学经典心得400字(二) 孔子是我国春秋时代的大教育家,他教过的学生不下三千,人们把他和学生上课时的交流记载了下来,这就是《论语》。 “温故而知新,可以为师矣。”这句话讲的是学习的方法,它让我们在学习后再温习一遍,好好温习了旧知识后,就会有新的发现,新的体会,就可以当老师了。我想起每到课间或回家后,我都会复习一下当天的内容,每次复习后,就 位置随动控制系统设计与实现 王桂霞, 李 媛 (中国船舶重工集团公司第704研究所,上海 200031) 摘 要:计算机控制系统是保证位置随动系统功能和性能的重要部分,文中结合船用仿真 转台阐述了多机集散控制结构形式的位置随动转台的计算机控制系统方案,并以某位置随动转台为背景,对系统工程实现中的接口电路设计、电机、伺服放大器以及采样频率选取、程序设计等一系列问题进行了讨论,设计结果在位置随动试验样机中应用取得了良好效果. 关键词:位置随动;控制系统;采样频率;设计 中图分类号:T M571,TP273 文献标识码:A 文章编号:100528354(2007)1220029204 Desi gn and reali zati on of control syste m of rando m positi on WANG Gui 2Xia,L I Yuan (No .704Research I nstitute,CSI C,Shanghai 20031,China ) Abstract :The co m puter control syste m is an i m portant part of guaranteeing perfor m ance of control syste m of rando m position .Co m bining the m arine si m ulation turntable,this paper set forth the co m puter control syste m sche m e on the rando m position turntable w ith m ulti 2co m puter distributes control structure .Then taking a certain turntable of rando m position as background,it respectively discussed such key proble m s of syste m engineering re 2alization as the interface circuit design,choice of m otor ,servo am plifier and sam ple frequency and the program design .The design sche m e is applied in a rando m position proto type and gets a good result . Key words :rando m position;control syste m;sam ple frequency;design 收稿日期:2007211219 作者简介:王桂霞(19772),女,工程师,主要从事自动控制的工作位置随动控制系统设计与实现 0 引言 位置随动转台系统由机械台体和计算机控制系统两个重要部分组成,前者是实现仿真功能的基础,而后者是保证转台系统功能和性能的核心部分.转台既要满足一定的动态、静态指标要求,也要为试验提供方便的操作界面和数据采集、处理手段,计算机控制系统不仅要具有实时控制功能,而且应具备监控管理功能,因此,计算机控制系统设计就成为仿真转台设计和工程实现的重要内容. 当前在各种控制系统中计算机已得到非常广泛的应用,根据不同的情况,控制系统的结构形式各不相同,一般分为操作指示系统、直接数字控制系统(DDC )和集散控制系统(DCS )等类型,在下文中将讨论集散控制结构形式的计算机控制系统的设计问题,其中主 要包括结构设计、系统工程实现中的接口线路设计、采样频率选择、程序设计等内容,并给出设计结果. 1 结构设计 本仿真转台采用多机集散控制形式,即采用上下位机的两级式结构.图1 为集散控制系统应用于本转 图1 原理框图 国学经典诵读心得体会 以下是关于国学经典诵读心得体会,希望内容对您有帮助,感谢您得阅读。 国学经典诵读心得体会(一) 谈到国学经典,我心十分澎湃,所谓国学,就是一国之所术也,这也必然与我们的古圣先贤紧密相关。 在五千年的历史长河中,中华民族形成了以爱国主义为核心的团结统一、爱好和平、勤劳勇敢、自强不息、厚德载物的伟大民族精神。这种民族精神深深植根于中华民族的优秀传统文化,吸收了人类文明的优秀成果。中华民族五千年的文明史创造了源远流长、博大精深的民族文化,有许多优秀的思想精华永远值得我们发扬。“自强不息”的开拓精神;“厚德载物”的博大胸怀;“富贵不能淫,贫贱不能移,威武不能屈”的浩然正气;“国家兴亡,匹夫有责”的爱国主义精神;“先天下之忧而忧,后天下之乐而乐”的无私奉献精神,“衙斋卧听萧萧竹,疑是民间疾苦声”的忧国忧民的情怀等等,这些凝结了中华民族精神的思想,对中华民族的形成和发展起到了极其重要的作用。 一个民族,一个国家,如果没有自己的精神支柱,就等于没有灵魂,就会失去凝聚力和生命力。中华民族精神是中华民 · 族生存、发展和繁荣的精神支柱和精神原动力,是中国人民精神风貌的集中体现。 中华民族传统文化的载体是国学经典,只有接续国学薪火,才能传承中华民族的文化精神。这是一件大好事。弘扬和培育民族精神,都要从做人开始。如果没有做人的基础,那就既不会有民族精神,更不会有革命精神。做人从哪里开始?从洒扫庭除,应对进退开始;从国学启蒙的“三百千”开始。这种学习不光是识字和道德思想知识的学习,更重要的是作为一种文化的传承来对待。 国学圣贤的精神和文化正是中华民族的精神和文化的主要组成部分,我们把它称之为“国学”。以国学启蒙的范本“三百千弟”为例。《三字经》最重要的特点是条理清楚、文理明畅、概括精辟地传授历史文化知识,伦理道德知识,团结友爱的重要性,以及学习应当刻苦等等,被誉为“袖里通鉴”。且反复劝勉学童勤学,敦促家长、老师认真对待对子弟、学生的教育。诵《百家姓》使我了解了中华民族姓氏的渊源。《千字文》是世界上流行年代最久远,使用人数最多的儿童国学启蒙读本,在中国教育史、文化史上占有非常重要的地位,是中国文化的小百科全书。《弟子规》是关于品德修养、行为规范的国学启蒙读本,将中华文化所倡导的忠、孝、仁、义、礼、智、信等理念用通俗的语言,浅近的历史典故讲述清楚。所以, · 关于我们控制理论教学制冷机仿真热工设备仿真论坛博客联系我们 主页 习题演练控制系统实验控制理论教程学生作业档案教师办公室典型作业展示常见问题 第一章自动控制的基本概念 第二章控制系统的数学描述 第三章控制系统的时域分析 第四章控制系统的频域分析 第五章过程控制 2.3 控制系统的典型环节 2.3 控制系统的典型环节 自动控制系统是由不同功能的元件构成的。从物理结构上看,控制系统的类型很多,相互之间差别很大,似乎没有共同之处。在对控制系统进行分析研究时,我们更强调系统的动态特性。具有相同动态特性或者说具有相同传递函数的所有不同物理结构,不同工作原理的元器件,我们都认为是同一环节。所以,环节是按动态特性对控制系统各部分进行分类的。应用环节的概念,从物理结构上千差万别的控制系统中,我们就发现,他们都是有为数不多的某些环节组成的。这些环节成为典型环节或基本环节。经典控制理论中,常见的典型环节有以下六种。 2.3.1 比例环节 比例环节是最常见、最简单的一种环节。 比例环节的输出变量y(t)与输入变量x(t)之间满足下列关系 (2.24) 比例环节的传递函数为 (2.25) 式中K为放大系数或增益。 杠杆、齿轮变速器、电子放大器等在一定条件下都可以看作比例环节。 例10 图2.10 是一个集成运算放大电路,输入电压为,输出电压为,为输入电阻, 为反馈电阻。我们现在求取这个电路的传递函数。 解从电子线路的知识我们知道这是一个比例环节,其输入电压与输出电压的关系是 (2.26) 按传递函数的定义,可以得到 (2.27) 式中,可见这是一个比例环节。如果我们给比例环节输入一个阶跃信号,他的输出同样也是一个阶跃信号。阶跃信号是这样一种函数 (2.28) 式中为常量。当时,称阶跃信号为单位阶跃信号。阶跃输入下比例环节的输出如图2.11 所示。比例环节将原信号放大了K倍。 国学经典诵读心得体会 [模版仅供参考,切勿通篇使用] 国学经典诵读心得体会(一) 谈到国学经典,我心十分澎湃,所谓国学,就是一国之所术也,这也必然与我们的古圣先贤紧密相关。 在五千年的历史长河中,中华民族形成了以爱国主义为核心的团结统一、爱好和平、勤劳勇敢、自强不息、厚德载物的伟大民族精神。这种民族精神深深植根于中华民族的优秀传统文化,吸收了人类文明的优秀成果。中华民族五千年的文明史创造了源远流长、博大精深的民族文化,有许多优秀的思想精华永远值得我们发扬。“自强不息”的开拓精神;“厚德载物”的博大胸怀;“富贵不能淫,贫贱不能移,威武不能屈”的浩然正气;“国家兴亡,匹夫有责”的爱国主义精神;“先天下之忧而忧,后天下之乐而乐”的无私奉献精神,“衙斋卧听萧萧竹,疑是民间疾苦声”的忧国忧民的情怀等等,这些凝结了中华民族精神的思想,对中华民族的形成和发展起到了极其重要的作用。 一个民族,一个国家,如果没有自己的精神支柱,就等于没有灵魂,就会失去凝聚力和生命力。中华民族精神是中华民族生存、发展和繁荣的精神支柱和精神原动力,是中国人民精神风貌 的集中体现。 中华民族传统文化的载体是国学经典,只有接续国学薪火,才能传承中华民族的文化精神。这是一件大好事。弘扬和培育民族精神,都要从做人开始。如果没有做人的基础,那就既不会有民族精神,更不会有革命精神。做人从哪里开始?从洒扫庭除,应对进退开始;从国学启蒙的“三百千”开始。这种学习不光是识字和道德思想知识的学习,更重要的是作为一种文化的传承来对待。 国学圣贤的精神和文化正是中华民族的精神和文化的主要 组成部分,我们把它称之为“国学”。以国学启蒙的范本“三百千弟”为例。《三字经》最重要的特点是条理清楚、文理明畅、概括精辟地传授历史文化知识,伦理道德知识,团结友爱的重要性,以及学习应当刻苦等等,被誉为“袖里通鉴”。且反复劝勉学童勤学,敦促家长、老师认真对待对子弟、学生的教育。诵《百家姓》使我了解了中华民族姓氏的渊源。《千字文》是世界上流行年代最久远,使用人数最多的儿童国学启蒙读本,在中国教育史、文化史上占有非常重要的地位,是中国文化的小百科全书。《弟子规》是关于品德修养、行为规范的国学启蒙读本,将中华文化所倡导的忠、孝、仁、义、礼、智、信等理念用通俗的语言,浅近的历史典故讲述清楚。所以,弘扬和培育民族精神,发扬和 诵读国学经典心得体会 经典是文化的精粹,是人类文明的积淀,诵读祖国优秀的传统文化,可以说是一份宝贵的精神财富,利用这份宝贵的精神财富,让 我们在读经诵典中养德行,学会了做人,它不仅丰富了我们知识, 提高了我们的学习成绩,更重要的是教会我们怎样做人,它像丝雨 一样润物细无声地泫润的我们的心灵,使我们良好的行为习惯和优 秀的道德育品质也自然形成,同时了增强民族自信心和自豪感。 因此,在老师的指导下,同学们直面经典,诵读经典,感受经典,仔细回味,接触经典的每一个人都受到了不同程度的影响,我们惊 喜的感受到开展经典诵读后带给我们的喜悦。 一.孩子的语文素养提高了 开展“经典诗文诵读”活动后,我欣喜地发现孩子的语言表达比以前更流畅、更风趣了。学生对经典一遍遍地诵读,每一遍都是一 个感知过程。在反复诵读中,诵读的水平在步步提高,学生的理解、体会也层层加深。“书读百遍,其义自见”就是这个道理。孩子在 朗读水平大面积提高的同时,形成了良好的语感,对语言的感知和 理解能力也大大提高。其次是知识面的扩大。俗语说得好:“读书 破万卷,下笔如有神”,“厚积薄发”。只有积累丰富的语言素材,才能“厚积薄发”,“下笔如有神”。我们可以看出孩子天天在进步。 二、道德修养得到完善经典诵读是进行青少年思想道德建设的有效途径。《弟子规》经典故事讲述了许多社会伦理、道德规范、人 生哲理等,在诵读期间,孩子逐渐改变着自己的生活、学习习惯。 儿童最善于模仿学习,久读经典,最易受到熏陶,他们会以古人为 榜样,学习古代圣贤的品质,更加自觉地规范自己的行为。随着诵 读活动的开展,逐渐培养了孩子良好的行为习惯,儿童心地善良, 性格温和,举止文雅,乐意与他人交流、合作。在家里,她们总对 爸爸妈妈、爷爷奶奶大声说话,和外人接触,却像只小绵羊,人家 控制系统的典型环节的 模拟实验报告修订版 IBMT standardization office【IBMT5AB-IBMT08-IBMT2C-ZZT18】 课程名称:控制理论乙指导老师:成绩:实验名称:控制系统典型环节的模拟实验类型:同组学生姓名: 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.熟悉超低频扫描示波器的使用方法 2.掌握用运放组成控制系统典型环节的电子电路 3.测量典型环节的阶跃响应曲线 4.铜鼓哦是暗夜男了解典型环节中参数的变化对输出动态性能的影响 二、实验内容和原理 以运算放大器为核心元件,由其不同的RC输入网络和反馈网络组成的各种典型环节,如下图所示。 右图中可以得到: 由上式可求得有下列模拟电路组成的典型环节的传递函数及其单位阶跃响应 1.积分环节 连接电路图如下图所示 和第一个实验相同,电源为峰峰值为30V 的阶跃函数电源,运放为LM358型号运放。在这次实验中,R2并不出现在电路中,所以我们可以同时调节R1的值和C 的值来改变该传递函数的其他参量值。具体表达式为: 式中:RC T = 由表达式可以画出在阶跃函数的激励下,电路所出现的阶跃响应图像 实验要求积分环节的传递函数需要达到(1)s s G 1)(1=(2)s s G 5.01)(2= 2.比例微分环节 连接电路图如下图所示 在该电路中,实验器材和第一次实验与第二次实验不变,R2仍然固定为1M 不改变。R1与C 并联之后与运算放大器的负端相连,R2接在运放的输出端和负输入端两端,起到了负反馈调节作用。具体表达式为: 式中,12R R K = ,C R T 1= 由表达式可以画出在阶跃函数的激励下,电路所出现的阶跃响应图像 经典的20个模拟电路原理及其电路图对模拟电路的掌握分为三个层次:初级层次:是熟练记住这二十个电路,清楚这二十个电路的作用。只要是电子爱好者,只要是学习自动化、电子等电控类专业的人士都应该且能够记住这二十个基本模拟电路。 中级层次:是能分析这二十个电路中的关键元器件的作用,每个元器件出现故障时电路的功能受到什么影响,测量时参数的变化规律,掌握对故障元器件的处理方法;定性分析电路信号的流向,相位变化;定性分析信号波形的变化过程;定性了解电路输入输出阻抗的大小,信号与阻抗的关系。有了这些电路知识,您极有可能成长为电子产品和工业控制设备的出色的维修维护技师。 高级层次:是能定量计算这二十个电路的输入输出阻抗、输出信号与输入信号的比值、电路中信号电流或电压与电路参数的关系、电路中信号的幅度与频率关系特性、相位与频率关系特性、电路中元器件参数的选择等。达到高级层次后,只要您愿意,受人尊敬的高薪职业--电子产品和工业控制设备的开发设计工程师将是您的首选职业。 一、桥式整流电路 1、二极管的单向导电性: 伏安特性曲线: 理想开关模型和恒压降模型: 2、桥式整流电流流向过程: 输入输出波形: 3、计算:Vo, Io,二极管反向电压。 二、电源滤波器 1、电源滤波的过程分析: 波形形成过程: 2、计算:滤波电容的容量和耐压值选择。 三、信号滤波器 1、信号滤波器的作用: 与电源滤波器的区别和相同点: 2、LC 串联和并联电路的阻抗计算,幅频关系和相频关系曲线。 3、画出通频带曲线。 计算谐振频率。 四、微分和积分电路 1、电路的作用,与滤波器的区别和相同点。 2、微分和积分电路电压变化过程分析,画出电压变化波形图。 3、计算:时间常数,电压变化方程,电阻和电容参数的选择。 国学经典诵读会心得 不记得什么时候与书结的缘,仿佛是一件很久远的事情,我不想问因果,也不想问年月,只愿在这条阅读之路上慢慢前行,直到永远…… 与书初相识 沿着记忆的绳索向回眺望,终于于漫无边际的迷蒙中觅得了点点的星光,那是一种微小但却闪亮的光芒。 首先闯入脑海的,是一个小孩捧着姐姐的教科书一边听姐姐讲述书上那些有趣的故事,一边凝视着书上简笔画的插图,有“乌鸦喝水”、“狼与山羊”、“狐狸与乌鸦”等等。第一次听说这些新奇的故事,那些小动物的形象便深深地刻入了脑海。对善恶、美丑、好坏的判断也在那不经意间萌生,并一直延伸到了今天。 小时候的我对读书并不十分感兴趣,那时候只是对书上画的那些精美图画倍感稀罕。直到有一天,随母亲去外公家,在外公家的窗台上看到了一本破旧的《三国演义》,随手一翻,竟被里面的精彩情节所吸引。走的时候偷偷地将书塞进自己的书包,回到家里抽空便坐在门槛上读那“破书”。也许是第一次读长篇小说的原因吧,竟然有一种很过瘾的感觉,恨不得一口气将它读完。如今书中的文字早已模糊,只是对那时读书的情景还记忆犹新。 自那以后,只要视野范围内有书可读,我便会贪婪地去攫取。尤其是《诗经》、《弟子规》、《三字经》那些国学经典,一律都不放过。 枯燥的书本 盼星星,盼月亮。终于盼到了渴望已久的课堂,也盼到了发书那美妙的时刻。将那些花花绿绿的书本捧在怀里,真有一种爱不释手的感觉。回到家中第一件事儿便是包书皮儿,那叫一个用心啊。 可是很快那股新鲜劲儿就过去了,课堂上听老师翻来覆去的讲语文,讲数学。久而久之,它们竟成了我最不愿看到的“朋友”。每天老师都会布置大量的抄写任务,就是从那书本上抄那些无聊的字词,一遍又一遍。有一次,我竟然抄着抄着就睡着了,醒来后,书上多了一道印痕。从此它在我的心中变得不再美丽,甚至有点反感呢。 小学,初中,高中。我无数次从噩梦中惊醒,都是因为这些枯燥而无聊的课本,那些曾经的美好哪儿去了啊?直到有一天,我走进了大学的校门,才感受到了自由的快乐。因为从那一刻起,我又重新拥抱了书的海洋,看到学校图书馆里那密密麻麻的图书,我方才认识到自己先前看过的那些书,不过是九牛之一毛。 《大学》、《中庸》、《儒林外史》……那些曾经熟悉而又遥远的朋友,又开始向我招手。我记不清那一天在图书馆呆了多长时间,也不记得到底看到了多少本可爱的书籍,只是那天晚上的梦不再是恶梦了,我像鸟儿飞向了蓝天,像鱼儿跃进了湖海。每到过礼拜的时候,同学们相继出去逛街,购物。而我却心甘情愿地泡在我的书海世界里。 从此,“枯燥”二字便越来越淡了;图书馆的阅览室里便又多了一个如饥似渴的身影。 经典的力量 时光荏苒,转眼角色就变了,从一个学生变成了老师。曾经的理想渐行渐远,书也离我越来越远,大学时期读的那些中外名著,也慢慢的在粗茶淡饭之中当咸菜就着吃光了。新家的书架上摆着几本崭新的经典名著,但也只是摆着而已,书成了纯粹的装饰品,成了被遗忘在角落里的风景。 其实一本书就是一种人生,经历了无数次的朝朝暮暮,繁华与凋落后,仍觉得读书才是人生最美的事情。 春日的午后,慵懒地坐在阳台上晒太阳,饮一杯茶茗,享受着人生,顺手从书架上抄出一本《道德经》。看着看着,竟然有了一种忘身世外的飘渺感,那些经典的文字竟深深的激荡着我的心灵: 控制工程基础考卷带答案复习资料 一、填空题:(每空1分,共20分) 1.对控制系统的基本要求一般可归结为_________稳定性,准确性,快速性____、____________、___________。 2.自动控制系统对输入信号的响应,一般都包含两个分量,即一个是瞬态响应分量,另一个是____________响应分量。 3.在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为_________________。 4.若前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则闭环传递函数为__________________ 。 5 函数f(t)=的拉氏变换式是 _________________ 。 6 开环对数频率特性的低频段﹑ 中频段﹑ 高频段分别表征了系统的 稳定性,动态特性,抗干扰能力 ﹑ ﹑ 。 7.Bode 图中对数相频特性图上的-180°线对应于奈奎斯特图中的___________。 8.已知单位反馈系统的开环传递函数为: 20 ()(0.51)(0.041) G s s s = ++求出系统在单位阶跃输入时的稳 态误差为 。 9.闭环系统稳定的充要条件是所有的闭环极点 t e 63- 均位于s 平面的______半平面。 10.设单位反馈控制系统的开环传递函数为 10()1 G s s = +,当系统作用有x i (t ) = 2cos(2t - 45?)输入 信号时,求系统的稳态输出为_____________________。 11.已知传递函数为2 ()k G s s =,则其对数幅频特性 L (ω)在零分贝点处的频率数值为_________ 。 12 在系统开环对数频率特性曲线上,低频段部分主要由 环节和 决定。 13.惯性环节的传递函数11+Ts ,它的幅频特性的数学式是__________,它的相频特性的数学式是____________________。 14.已知系统的单位阶跃响应为()1t t o x t te e --=+-,则 系统的脉冲脉冲响应为__________。 一、填空题 (每空1分,共20分): 1 稳定性,准确性,快速性;2 稳态;3 反馈; 4 ) ()(1) (s H s G s G ±;5 3 ()6 F s s = + 6 稳定性,动态特性,抗干扰能力; 7 负实轴; 8 1 21 9 右半平面; 10读国学经典心得体会
电气经典20个电路图
自动控制系统位置随动系统课程设计
国学经典诵读心得体会作文
控制系统典型环节性能分析
最新二十个经典电路
国学经典诵读心得500字作文
实验一 控制系统典型环节的模拟实验
电子工程师应具备的电路设计常识及几十个经典电路解析
读国学经典心得400字五篇
位置随动控制系统设计与实现
国学经典诵读心得体会
控制系统的典型环节
国学经典诵读心得体会
诵读国学经典心得体会
控制系统的典型环节的模拟实验报告修订版
经典的20个模拟电路原理及其电路图汇总
国学经典诵读会心得
控制工程基础考卷带答案复习资料
相关主题
文本预览