
推导zeta 电路的小信号模型
一、电力电子系统的非线性
由于DC/DC 变换器中包含功率开关器件或二极管等非线性元件,因此是一个非线性系统。但是当DC/DC 变换器运行在某一稳态工作点附近,电路状态变量的小信号扰动量之间的关系呈现线性的特性。
二、电力电子系统线性化的前提
Zeta 电路在稳态工作时,输出电压包含开关周期平均值分量和开关频率纹波分量,而后者远远小于前者。开关平率纹波分量是与生俱来的,无法彻底消除。
假设占空比在静态工作点D 附近存在一个低频、小扰动即:
()()sin m
d t D d t D D t (1.1)
则输出电压也被低频调制,即输出电压含有三个分量:直流分量、低频调制小信号分量
和开关频率分量。
若扰动量的幅值足够小,则可用静态工作点处的切线代替实际曲线。此时,输出电压的低频小信号分量与扰动量成正比,说明具有了线性电路的特征。忽略纹波,研究小信号扰动下的动态特性,电力电子系统方可近似为线性系统。
三、小信号线性模型的基本建立方法
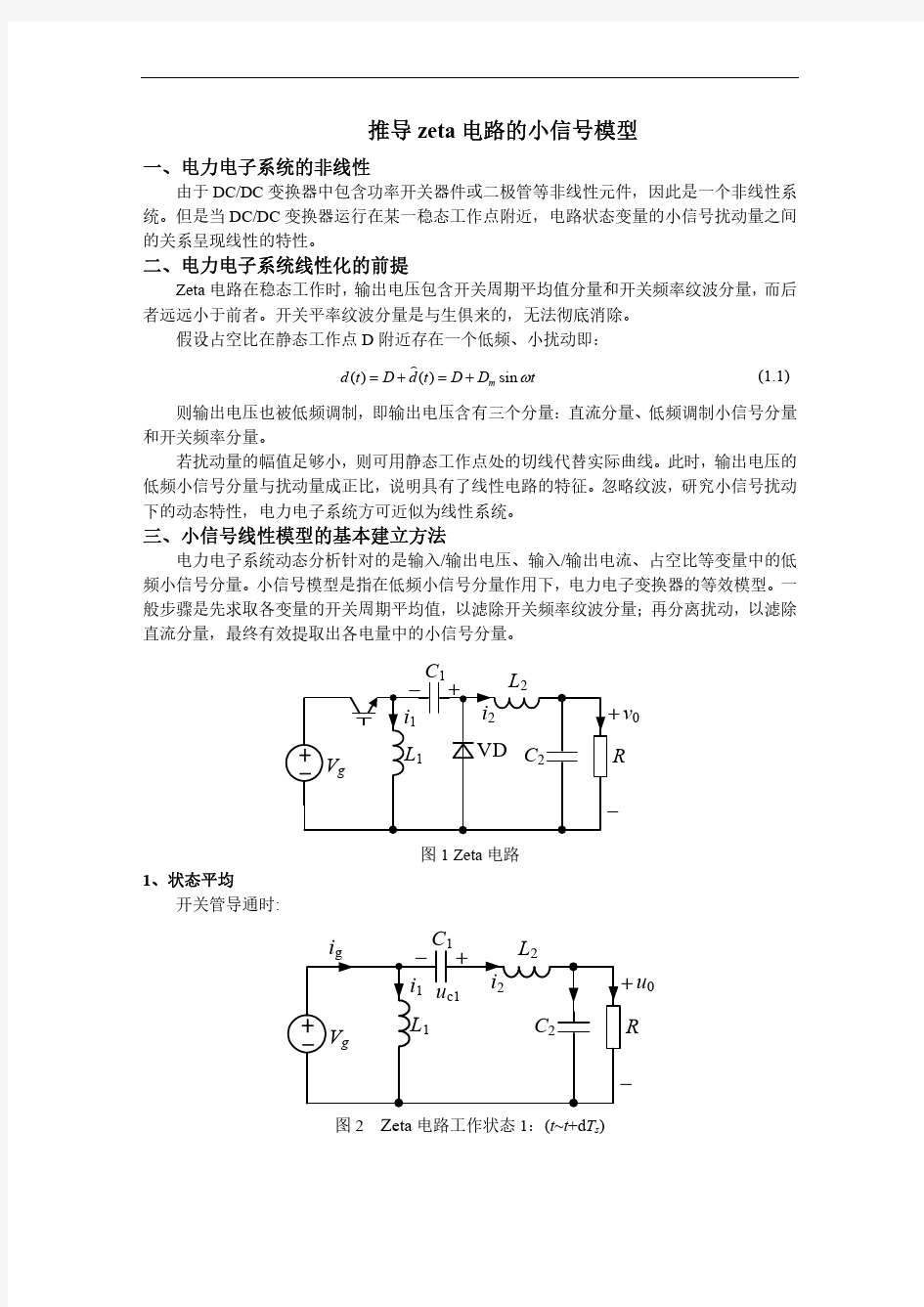
电力电子系统动态分析针对的是输入/输出电压、输入/输出电流、占空比等变量中的低频小信号分量。小信号模型是指在低频小信号分量作用下,电力电子变换器的等效模型。一般步骤是先求取各变量的开关周期平均值,以滤除开关频率纹波分量;再分离扰动,以滤除直流分量,最终有效提取出各电量中的小信号分量。
R v 0
图1 Zeta 电路
1、状态平均
开关管导通时
:
R u 0
图2 Z eta 电路工作状态1:(t ~t +d T s )
开关管关断时:
R u 0
图3 Zeta 电路工作状态2:(t +d T s ~t +T s )
根据Zeta 电路的两种不用的工作状态我们得到大信号模型:
s
s
s s
s s s
s s
s
s s
s
s
1'1
11
'1212'212
2d d d d d d d d T
g c T T c T T T
T g o c o
T T T T o o T T T i L d v d u t u C d i d i t
i L d v u u d u t u u C i t R
(1.2)
输入电流开关周期平均值:
s
s
s
1
2
g
T T T i d i i (1.3)
2、分离扰动线性化
如式(1.2)和式(1.3)所示的Zeta 电路平均变量的状态方程中各平均变量和控制量d 都包含了直流分量和低频小信号分量,称为大信号模型。若要得出低频小信号模型,需要将直流分量和低频小信号扰动进行分离。
S
111T ()()i t I i t (1.4) S
222T ()()i t I i t (1.5) S
111T ()()c c c t U u t (1.6) S
T ()
()o o o
u t U u t (1.7) ()d D d t (1.8) S
T ()
()g g g
V t V v t (1.9)
将(1.4)~(1.9)代入大信号模型,直流项为零,忽略非线性的二阶交流项,保留线性的一阶交流项得到Zeta 电路的线性化小信号交流模型(线性化):
'1111
'111221221122?d ???()d ?d ???()d ?d ????()()d ??d ?d g c g c c g c g c o o o
i L DV D u d V U t u C I I d Di D i t i L D V u d V U u t u u C i t R
(1.10)
1212????()g i D i i d I I (1.11)
四、等效电路模型
+-+
?
+?
+?
L 1
?g
DV '1?c D u
1
?()g c d V U 11?d d i L t
2?
a) b)
+-+
?
+
?
+?
L 2
1
?c DV 1?()g c d V U 22?d d i L t
+
?
?g
DV ?o u
R
c)
d)
?g
V
d)
图4 五个等效子电路
将五个等效子电路合并成Zeta 的小信号交流等效模型:
?g
V
1?()g c d V U
图5 Zeta 电路的小信号交流等效模型
基于matlab 的仿真(给定幅值为0.1V 的交流扰动,20V 直流输入,0.4占空比):
仿真结果:
实验一 基于Matlab 的控制系统模型 姓名 学号 班级 一、实验目的 1) 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和编程方法。 2) 学习使用Matlab 进行各类数学变换运算的方法。 3) 学习使用Matlab 建立控制系统模型的方法。 二、实验原理 1. 香农采样定理 对一个具有有限频谱的连续信号f (t )进行连续采样,当采样频率满足ωs ≥ωmax 时,采样信号f *(t )能无失真的复现原连续信号。 (1) 作信号f (t )=5e 10t 和f *(t ) =5e 10kT 的曲线,比较采样前后的差异。 0.05 0::0.5 5*(10*) subplot(2,1,1) plot(,) grid subplot(2,1,2) stem(,) grid T t T f exp t t f t f ===- 请改变采样周期T ,观察不同的采样周期下的采样效果。
(2) 频谱曲线 50:1:50 5./(100.^2) (,)w F sqrt w plot w F grid =-=+ 若|F (j ωmax ) |=0.1|F (0)|,选择合理的采样周期T 并验加以证。 400:20:400 200 2*/05/*(1./(100.^2)) 15/*(1./(100().^2)) 25/*(1./(100().^2)) (,0,,1,,2) w ws Ts pi ws F Ts sqrt w F Ts sqrt w ws F Ts sqrt w ws plot w F w F w F grid =-===+=+-=++ 请改变采样频率,观察何时出现频谱混叠? 2. 拉式变换和Z 变换 (1) 使用Matlab 求函数的拉氏变换 拉式变换: 反拉氏变换: ()()()()()()2 222 1exp -*123*exp -*4sin *5exp -*s 11/(1) 21/()31/4/() 51/(*(2)*(*c 3)o ) s *yms syms a w t f a t laplace f f t f t a t f s a f s ilaplace f f s a f s f w s w f s s s w t f a t w t ==+==+====++== (2) 使用Matlab 求函数的Z 变换 Z 变换: 反Z 变换:
开关电源的小信号模型及环路设计 文章作者:万山明吴芳 文章类型:设计应用文章加入时间:2004年8月31日22:9 文章出处:电源技术应用 摘要:建立了Buck电路在连续电流模式下的小信号数学模型,并根据稳定性原则分析了电压模式和电流模式控制下的环路设计问题。 关键词:开关电源;小信号模型;电压模式控制;电流模式控制 引言 设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。而环路的设计与主电路的拓扑和参数有极大关系。为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。采用其他拓扑的开关电源分析方法类似。 1 Buck电路电感电流连续时的小信号模型
图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。Re为滤波电容C的等效串联电阻,Ro为负载电阻。各状态变量的正方向定义如图1中所示。 S导通时,对电感列状态方程有 L(dil/dt)=Uin-Uo (1) S断开,D1续流导通时,状态方程变为 L(dil/dt)=-Uo (2) 占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DTs和(1-D)Ts的时间(Ts为开关周期),因此,一个周期内电感的平均状态方程为 L(dil/dt)=D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo (3) 稳态时,=0,则DUin=Uo。这说明稳态时输出电压是一个常数,其大小与占空比D和输入电压Uin成正比。 由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
第1 页共11 页 倒立摆系统的建模及Matlab仿真 1.系统的物理模型 考虑如图(1)所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。 图(1)倒立摆系统 假定倒立摆系统的参数如下。 摆杆的质量:m=0.1g l=1m小车的质量:摆杆的长度:2重力加速度:g=9.8m/M=1kg s摆杆的质量在摆杆的中心。 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量?≤10%,调节时间ts ≤4s ,通过小车的水平运动使倒立摆保持在垂直位置。 2.系统的数学模型 2.1建立倒置摆的运动方程并将其线性化。 为简化问题,在数学模型中首先假设:1)摆杆为刚体;2)忽略摆杆与支点之间的摩擦;3)忽略小车与接触面间的摩擦。 ?),在u设小车瞬时位置为z,摆心瞬时位置为(作用下,小车及摆均产生加速远 动,sin?lz根据牛顿第二定律,在水平直线远动方向的惯性力应与u平衡,于是有 22dzd?)?sinu?M?m(zl22dtdt???2????z(M?mml?)cos?mlusin? 即:??①
绕摆轴转动的惯性力矩与重力矩平衡,因而有. 第2 页共11 页 2??d??? sin??lcosm(z?lsinmgl)??2dt?????22???????即: nis?l?ocgcosincoszs?ls??② 以上两个方程都是非线性方程,为求得解析解,需作线性化处理。由于控制的目的是保持倒立摆直?2?????且可忽略则,立,在试驾合适的外力条件下,假定θ很小,接近于零时合理的,1sincos??,项。于是有 ???M?zm?u?ml??)(③ ????g?z?l??④联立求解可得1mg?u?z????MM 1)?m(M????u??MlMl 列写系统的状态空间表达式。2.2??T xx,x,x,,选取系统变量则 xx,x,xx?,42134123xx??211mgux???x?32MM x?x?431)(M?mu?x?x? 34MlMl 即00100????z??1mg??????000?z?????d MM??Bu?Ax?xux????????00001???dt????1gm?(M)????000??????? MlMl??????Cx?0?y?xx1001代入数据计算得到:0100????000?1??????T0D,?0??1BA?,?001,C100??1000??00011?? 11 页3 页共第 3.设计控制器3.1判断系统的能控性和稳定性 1100????0011????23BBAABAB?Q?故被控对象完全可控, rank()=4,Q kk??11?0?10??011?10???22???11?。出现大于零的特征值,故被,,0 解得特征值为 0由特征方程0??11I?A?)(控对象不稳定3.2确定希望的极点, 另一对为远极点,认为系统性能主要由主导,选其中一对为主导极点和希望的极点n=4ss21极点决定,远极点只有微小影响。根据二阶系统的关系式,先确定主导极点???42??1????10.?e??t1.67?有,闭环可得;取误差带,于是取,则6.?059?0.02.?0? pns??n2????1?js??=-10.8j,远极点选择使它和原点的距离大于主导极点与原点 距离主导极点为?n,21s??15倍,取的54,33.3采用状态反馈方法使系统稳定并配置极点 ??kkkk?k;状态反馈系统的状态方程,馈状态反的控制规律为为kxu??3102?,其
实验目录 实验一:Matlab环境熟悉与基本运算(设计型)实验二:Matlab语言程序设计(设计型) 实验三:控制系统模型的建立(设计型) 实验四:Simulink仿真入门(验证型) 实验五:控制系统时域仿真分析(设计型) 实验六:Simulink环境下时域仿真 实验七:控制系统根轨迹仿真分析 实验八:控制系统频域仿真分析(设计型)
1、矩阵运算(1)矩阵的乘法 A=[1 2;3 4]; B=[5 5;7 8]; y=A^2*B y = 105 115 229 251 (2)矩阵除法 A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; y1=A\B 警告: 矩阵接近奇异值,或者缩放错误。结果可能不准确。RCOND = 1.541976e-18。y1 = 1.0e+16 * -0.4504 1.8014 -1.3511 0.9007 -3.6029 2.7022 -0.4504 1.8014 -1.3511 y2=A/B y2 = 1.0000 1.0000 1.0000 4.0000 2.5000 2.0000 7.0000 4.0000 3.0000 (3)矩阵的转置及共轭转置 A=[5+i,2-i,1;6*i,4,9-i]; y1=A.' y1 = 5.0000 + 1.0000i 0.0000 + 6.0000i 2.0000 - 1.0000i 4.0000 + 0.0000i 1.0000 + 0.0000i 9.0000 - 1.0000i y2=A' y2 = 5.0000 - 1.0000i 0.0000 - 6.0000i 2.0000 + 1.0000i 4.0000 + 0.0000i 1.0000 + 0.0000i 9.0000 + 1.0000i 实验名称:Matlab环境熟悉与基本运算(设计型)
现代电源技术 基于BUCK电路的电源设计 学院: 专业: 姓名: 班级: 学号: 指导教师: 日期:
目录 摘要 (3) 一、设计意义及目的 (4) 二、Buck电路基本原理和设计指标 (4) 2.1 Buck电路基本原理 (4) 2.2 Buck电路设计指标 (6) 三、参数计算及交流小信号等效模型建立 (6) 3.1 电路参数计算 (6) 3.2 交流小信号等效模型建立 (10) 四、控制器设计 (11) 五、Matlab电路仿真 (17) 5.1 开环系统仿真 (17) 5.2 闭环系统仿真 (18) 六、设计总结 (21)
摘要 Buck电路是DC-DC电路中一种重要的基本电路,具有体积小、效率高的优点。本次设计采用Buck电路作为主电路进行开关电源设计,根据伏秒平衡、安秒平衡、小扰动近似等原理,通过交流小信号模型的建立和控制器的设计,成功地设计了Buck电路开关电源,通过MATLAB/Simulink进行仿真达到了预设的参数要求,并有效地缩短了调节时间和纹波。通过此次设计,对所学课程的有效复习与巩固,并初步掌握了开关电源的设计方法,为以后的学习奠定基础。 关键词:开关电源设计 Buck电路
一、设计意义及目的 通常所用电力分为直流和交流两种,从这些电源得到的电力往往不能直接满足要求,因此需要进行电力变换。常用的电力变换分为四大类,即:交流变直流(AC-DC),直流变交流(DC-AC),直流变直流(DC-DC),交流变交流(AC-AC)。其中DC-DC电路的功能是将直流电变为另一固定电压或可调电压的直流电,包过直接直流变流电路和间接直流变流电路。直接直流变流电路又称斩波电路,它的功能是将直流电变为另一固定电压或可调电压的直流电,主要包括六种基本斩波电路:Buck电路,Boost电路,Buck-Boost电路,Cuk电路,Sepic电路,Zeta 电路。其中最基本的一种电路就是Buck电路。 因此,本文选用Buck电路作为主电路进行电源设计,以达到熟悉开关电源基本原理,熟悉伏秒平衡、安秒平衡、小扰动近似等原理,熟练的运用开关电源直流变压器等效模型,熟悉开关电源的交流小信号模型及控制器设计原理的目的。这些知识均是《线代电源设计》课程中所学核心知识点,通过本次设计,将有效巩固课堂所学知识,并加深理解。 二、Buck电路基本原理和设计指标 2.1 Buck电路基本原理 Buck变换器也称降压式变换器,是一种输出电压小于输入电压的单管不隔离直流变换器,主要用于电力电路的供电电源,也可拖动直流电动机或带蓄电池负载等。其基本结构如图1所示:
详解:开关电源的小信号建模 开关电源的反馈环路设计是开关电源设计的一个非常重要的部分,它关系到一个电源性能的好坏。要设计一个好的环路,必须要知道主回路的数学模型,然后根据主回路的数学模型,设计反馈补偿环路。本文想重点介绍下主回路的数学建模方法。 首先来介绍下小信号的分析法。开关电源是一个非线性系统,但可以对其静态工作点附近进行局部线性化。这种方法称为小信号分析法。 以一个CCM模式的BOOST电路为例, 其增益为: 其增益曲线为: 其中M和D之间的关系是非线性的。但在其静态工作点M附近很小的一个区 域范围内,占空比的很小的扰动和增益变化量之间的关系是线性的。因此在这个很小的区域范围内,我们可以用线性分析的方法来对系统进行分析。这就是小信号分析的基本思路。因此要对一个电源进行小信号建模,其步骤也很简单,第一步就是求出其静态工作点,第二步就是叠加扰动,第三步就是分离扰动,
进行线性化,第四步就是拉氏变换,得到其频域特性方程,也就是我们说的传递函数。要对一个变换器进行小信号建模,必须满足三个条件。 首先要保证得到的工作点是“静”态的。因此有两个假设条件: 1,一个开关周期内,不含有低频扰动。因此叠加的交流扰动小信号的频率应该 远远小于开关频率。这个假设称为低频假设 2,电路中的状态变量不含有高频开关纹波分量。也就是系统的转折频率要远远 小于开关频率。这个假设称为小纹波假设。其次为了保证这个扰动是在静态工作 点附近,因此有第三个假设条件: 3,交流小信号的幅值必须远远小于直流分量的幅值。这个称为小信号假设。 对于PWM模式下的开关电源,通常都能满足以上三个假设条件,因此可以使用小 信号分析法进行建模。对于谐振变换器来说,由于谐振变换器含有一个谐振槽路。 在一个开关时区或多个开关时区内,谐振槽路中各电量为正弦量,或者其有效成 分是正弦量。正弦量的幅值是在大范围变化的,因此在研究PWM型变换器所使用 的“小纹波假设”在谐振槽路的小信号建模中不再适用。对于谐振变换器,通常 采用数据采样法或者扩展描述函数法进行建模。 以一个CCM模式下的BUCK电路为例,应用上面的四个步骤,来建立一个小信号 模型。 对于一个BUCK电路 当开关管开通时,也就是在(0-DTs)区间 其状态方程为
一、反激变换器小信号模型的推导 1.1 DCM 1.1.1 DCM buck-boost 小信号模型的推导 根据状态空间平均法推导DCM buck-boost 变换器小信号模型如下: +-v in (t)v o (t)一般开关网络 图1 1理想Buck-Boost 变换器开关网络 1231d d d ++= (1) 首先,定义开关网络的端口变量1122,,,v i v i ,建立开关周期平均值 1 1 2 2 ,,,s s s s T T T T v i v i 之间的关系: 11()s g T g pk s s v t v i d T d T L L <>= = (2) 根据工作模态:113()()()0s s s L T g T T v t d v t d v t d <>=<>+<>+ (3) []1 1 ()()()s s s t T t T L T L s t t s s s di L v t v d L d i t T i t T T d T τττ++<>= = =+-? ? (4) DCM 下,()()0s i t T i t +==,所以()0s L T v t <>=,结合(3)式: 11()()0s s g T T d v t d v t <>+<>= (5) 21()(t)=-(t)()s s g T T v t d d v t <><> (6) 根据工作模态:1123()()0()(()())()()s s s s T g T T g T v t d t d t v t v t d t v t <>=+<>-<>+<>(7) 消去上式的2d 和3d 得:1()()s s T g T v t v t <>=<> (8) 根据工作模态:2123()()(()())()0(()) s s s s T g T T g T v t d t v t v t d t d v t <>=<>-<>++-<>
实验一 用MATLAB 处理线性系统数学模型 [说明] 一个控制系统主要由被控对象、测量装置、控制器和执行器四大部分构成。MATLAB 软件的应用对提高控制系统的分析、设计和应用水平起着十分重要的作用。采用MATLAB 软件仿真的关键问题之一是在MATLAB 软件平台上怎样正确表示被控对象的数学模型。 [实验目的] 1.了解MATLAB 软件的基本特点和功能; 2.掌握线性系统被控对象传递函数数学模型在MATLAB 环境下的表示方法及转换; 3.掌握多环节串联、并联、反馈连接时整体传递函数的求取方法; 4. 掌握在SIMULINK 环境下系统结构图的形成方法及整体传递函数的求取方法; 5.了解在MATLAB 环境下求取系统的输出时域表达式的方法。 [实验指导] 一、被控对象模型的建立 在线性系统理论中,一般常用的描述系统的数学模型形式有: (1)传递函数模型——有理多项式分式表达式 (2)传递函数模型——零极点增益表达式 (3)状态空间模型(系统的内部模型) 这些模型之间都有着内在的联系,可以相互进行转换。 1、传递函数模型——有理多项式分式表达式 设系统的传递函数模型为 111011 1......)()()(a s a s a s a b s b s b s b s R s C s G n n n n m m m m ++++++++= =---- 对线性定常系统,式中s 的系数均为常数,且a n 不等于零。 这时系统在MATLAB 中可以方便地由分子和分母各项系数构成的两个向量唯一地确定,这两个向量常用num 和den 表示。 num=[b m ,b m-1,…,b 1,b 0] den=[a n ,a n-1,…,a 1,a 0]
过u逼题 ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------满y Do路釐r 满y Do路釐r 满y Do路釐r 恶描获 提得获 度00获 D点 度得获 得感获 感得获 描0获 补度言 综难量l釐y D釐s逼r难过难高g 环u高逼t难o高 补恶言 获s高获s高 离T点恶方度得补得言 电获难高模感方获如获o模恶实恶获如To高模0实得描μs实fs模得抑0题hz 离s模恶实度u电实点o模得型度抑0u环实 综逼o模是展得 mΩ实 ()*()()*(1)*()*()s f Ton L i f fs Vin Gic f e Vc f sf Lf s f ?= =? 度 *Vo sf Ri Lf = fs 补得言 ()2***s f j f π=如 系路量釐 ( )*2 2 ()*1()()11*11s f T o n s f T o n e s f s f Q ωω?=? ++ 得 2 1Q π = 1Ton π ω=
()*()*(1()**) ()*(1)**()*()1()*()*s f Ton Vo f fs Vin Rl s f Rco Co Gvc f e Vc f sf Lf s f s f Rl Rco Co ?+= =?++ 恶 22 11*(1()**) ()*()()1()*()*11*11Rl s f Rco Co Gvc f s f s f Ri s f Rl Rco Co Q ωω+= ++++ 感 得 1*1()* 2Ton Ri k f Ls = 1*2()*2Ton Ri k f Ls =? 题得(f噪如 22()(1()**)1 1()** 2()*2()()()()*(1****11*111()* *21Vo f Rl s f Rco Co Gvc f k f Rl k f s f s f Vc f Ri Rl Co Ro Rco Co Ri Ri Q s f Rl k Ri ωω+= =??++ +? 题得(f噪 ()1()**) 2()*()1()**Vo f Rl s f Rco Co Gvc f Vc f Ri s f Rl Co +==+ 抑
MATLAB及 控制系统仿真 实验 班级:智能0702
姓名:刘保卫 学号: 06074053(18) 实验四控制系统数学模型转换及MATLAB实现 一、实验目的 熟悉MATLAB 的实验环境。 掌握MATLAB 建立系统数学模型的方法。 二、实验内容 (注:实验报告只提交第2 题) 1、复习并验证相关示例。 (1)系统数学模型的建立 包括多项式模型(Transfer Function,TF),零极点增益模型(Zero-Pole,ZP),状态空间模型 (State-space,SS); (2)模型间的相互转换 系统多项式模型到零极点模型(tf2zp),零极点增益模型到多项式模型(zp2tf),状态空间模 型与多项式模型和零极点模型之间的转换(tf2ss,ss2tf,zp2ss…); (3)模型的连接 模型串联(series),模型并联(parallel),反馈连接(feedback) 2、用MATLAB 做如下练习。 (1)用2 种方法建立系统的多项式模型。 程序如下: %建立系统的多项式模型(传递函数) %方法一,直接写表达式 s=tf('s') Gs1=(s+2)/(s^2+5*s+10) %方法二,由分子分母构造 num=[1 2]; den=[1 5 10]; Gs2=tf(num,den) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果:
易知两种方法结果一样 Transfer function: s Transfer function: s + 2 -------------- s^2 + 5 s + 10 Transfer function: s + 2 -------------- s^2 + 5 s + 10 (2)用2 种方法建立系统的零极点模型和多项式模型。 程序如下: %方法一 s=tf('s') Gs1=10*(s+1)/((s+1)*(s+5)*(s+10)) % zpk模型 ZPK=zpk(Gs1) %方法二 % tf模型 num=[10 10]; den=conv([1 1],conv([1 5],[1 10])); Gs2=tf(num,den) % zpk模型 ZPK=zpk(Gs2) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s Transfer function:
开关电源(Buck电路)的小信号模型及环路 设计 华中科技大学电气与电子工程学院作者:万山明,吴芳 0 引言 设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。而环路的设计与主电路的拓扑和参数有极大关系。为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。采用其他拓扑的开关电源分析方法类似。 1 Buck电路电感电流连续时的小信号模型 图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。R e为滤波电容C的等效串联电阻,R o为负载电阻。各状态变量的正方向定义如图1中所示。 图1 典型Buck电路 S导通时,对电感列状态方程有 L=U in-U o (1) S断开,D1续流导通时,状态方程变为 L=-U o (2) 占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DT s和(1-D)T s的时间(T s为开关周期),因此,一个周期内电感的平均状态方程为 L=D(U in-U o)+(1-D)(-U o)=DU in-U o(3) 稳态时,=0,则DU in=U o。这说明稳态时输出电压是一个常数,其大小与占空比D 和输入电压U in成正比。 由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得 L=(D+d)(U in+)-(U o+) (4)
利用基本建模法建立理想Buck 电路的小信号模型: 一 求平均变量 模态1:电感电压和电容电流的表达式 L g d () ()=()()d i t v t L v t v t t =- d ()() ()=()d C v t v t i t C i t t R =- 当变换器满足低频假设和小纹波假设时, s s L g d () ()=()()d T T i t v t L v t v t t ≈??-?? s s ()d () ()=()d T C T v t v t i t C i t t R ??≈??- 模态2:电感电压和电容电流的表达式 L d () ()=()d i t v t L v t t =- d ()() ()=()d C v t v t i t C i t t R =- 当变换器满足低频假设和小纹波假设时, s L d () ()=()d T i t v t L v t t ≈-?? s s ()d () ()=()d T C T v t v t i t C i t t R ??≈??- 进一步得到电感电压与电容电流在一个开关周期内的平均值: s s s s L g ()=(t)(()())(1())(())T T T T v t d v t v t d t v t ????-??+--?? s s s s s ()()()=()(())(1())(())T T C T T T v t v t i t d t i t d t i t R R ????????- +-??- 整理后,得 s s s g d ()()()()d T T T i t L d t v t v t t ??=??-?? s s s d ()()()d T T T v t v t C i t t R ????=??-
MATLAB及控制系统 仿真实验 班级:智能0702 姓名:刘保卫 学号:06074053(18)
实验四控制系统数学模型转换及MATLAB实现 一、实验目的 熟悉MATLAB 的实验环境。 掌握MATLAB 建立系统数学模型的方法。 二、实验内容 (注:实验报告只提交第2 题) 1、复习并验证相关示例。 (1)系统数学模型的建立 包括多项式模型(Transfer Function,TF),零极点增益模型(Zero-Pole,ZP),状态空间模型 (State-space,SS); (2)模型间的相互转换 系统多项式模型到零极点模型(tf2zp),零极点增益模型到多项式模型(zp2tf),状态空间模 型与多项式模型和零极点模型之间的转换(tf2ss,ss2tf,zp2ss…); (3)模型的连接 模型串联(series),模型并联(parallel),反馈连接(feedback) 2、用MATLAB 做如下练习。 (1)用2 种方法建立系统的多项式模型。 程序如下: %建立系统的多项式模型(传递函数) %方法一,直接写表达式 s=tf('s') Gs1=(s+2)/(s^2+5*s+10) %方法二,由分子分母构造 num=[1 2]; den=[1 5 10]; Gs2=tf(num,den) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s
Transfer function: s + 2 -------------- s^2 + 5 s + 10 Transfer function: s + 2 -------------- s^2 + 5 s + 10 (2)用2 种方法建立系统的零极点模型和多项式模型。程序如下: %方法一 s=tf('s') Gs1=10*(s+1)/((s+1)*(s+5)*(s+10)) % zpk模型 ZPK=zpk(Gs1) %方法二 % tf模型 num=[10 10]; den=conv([1 1],conv([1 5],[1 10])); Gs2=tf(num,den) % zpk模型 ZPK=zpk(Gs2) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s Transfer function: 10 s + 10 ------------------------ s^3 + 16 s^2 + 65 s + 50
§4.3 放大电路的分析方法 ——小信号模型分析法
思路:在Q点附近,三极管特性曲线可近似看为线性的,把非线性问题转为 线性问题求解。条件:输入为交流小信号(微变信号) 式中各量均是全量,包 一、H参数等效电路: 含直流和交流两部分
1、H参数的导出:
v BE = VBE + vbe
iB = I B + ib iC = I C + ic
iC iB
+
vCE = VCE + vce
vBE=f1 (iB , vCE ) iC=f 2 (iB , vCE )
电气工程学院 苏士美
T
+
输入回路关系 输出回路关系
v BE 2016/3/7
PDF pdfFactory Pro
v CE -
1
https://www.doczj.com/doc/b07166445.html,
小信号模型分析法
考虑微变关系,对两式取全微分:
vBE=f1 (iB , vCE ) iC=f 2 (iB , vCE )
式中: dvBE = vbe , diB = ib , dvCE = vce , diC = ic
dvBE=
?vBE ?iB
? diB +
vCE
?vBE ?vCE
? dvCE
iB
vbe=hie ib + hre vce
在小信号情况下: H参数,具有不同的 量纲,混合参数
共e下BJT的输入 电阻rbe(欧姆) 电流放大系数β
输出对输入的反作 用μr(无量纲) 输出电导1/rce
?iC diC= ?iB
2016/3/7
PDF pdfFactory Pro
vCE
?iC ? diB + ?vCE
? dvCE
iB
电气工程学院 苏士美
ic=hfe ib + hoe vce
2
https://www.doczj.com/doc/b07166445.html,
倒立摆系统的建模及MATLAB仿真 通过建立倒立摆系统的数学模型,应用状态反馈控制配置系统极点设计倒立摆系统的控制器,实现其状态反馈,从而使倒立摆系统稳定工作。之后通过MA TLAB 软件中Simulink工具对倒立摆的运动进行计算机仿真,仿真结果表明,所设计方法可使系统稳定工作并具有良好的动静态性能。 倒立摆系统是1个经典的快速、多变量、非线性、绝对不稳定系统,是用来检验某种控制理论或方法的典型方案。倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。因此研究倒立摆系统具有重要的实践意义,一直受到国内外学者的广泛关注。本文就一级倒立摆系统进行分析和研究,建立倒立摆系统的数学模型,采用状态反馈极点配置的方法设计控制器,并应用MA TLAB 软件进行仿真。 1 一级倒立摆系统的建模 1. 1 系统的物理模型 如图1 所示,在惯性参考系下,设小车的质量为M ,摆杆的质量为m ,摆杆长度为l ,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用在小车上的水平控制力为f 。这样,整个倒立摆系统就受到重力,水平控制力和摩擦力的3 外力的共同作用。 图1 一级倒立摆物理模型 1. 2 系统的数学模型 在系统数学模型中,本文首先假设: (1) 摆杆为刚体。 (2)忽略摆杆与支点之间的摩擦。 (3)忽略小车与导轨之间的摩擦。 然后根据牛顿第二运动定律,求得系统的运动方程为:
方程(1) , (2) 是非线性方程,由于控制的目的是保持倒立摆直立,在施加合适的外力条件下,假定θ很小,接近于零是合理的。则sinθ≈θ,co sθ≈1 。在以上假设条件下,对方程线性化处理后,得倒立摆系统的数学模型: 1. 3 系统的状态方程 以摆角θ,角速度θ',小车的位移x ,速度x'为状态变量,输出为y 。即令: 则一级倒立摆系统的状态方程为: 2 控制器设计及MATLAB 仿真 2. 1 极点配置状态反馈的基本原理
1. Buck 电路小信号线性化交流模型为: ?????????+=- =+-=)(~)(~)(~)(~)(~)(~)(~)(~)(~)(~o o o t d I t i D t i R t u t i dt t u d C t d V t u t u D dt t i d L L L in L in in L (1-1) 2. Buck 电路小信号交流模型等效电路 图2-1 Buck 电路小信号交流模型等效电路 3. 传递函数 ()()()()()()????? ??????++=++===112020s R L LCs V s d s v s R L LCs D s v s v g s v o s d g o g (3-1) 谐振频率Hz LC f 3.50321 0==π --------徐德鸿.电力电子系统建模及控制.机械工业出版社,2005. 4. 主电路参数设计 (1)输入直流电压in V :100V (2)输出电压o V :50V , 纹波系数:00001≤δ (3)占空比:5.0o ==in V V D (4)负载:Ω=10R (5)功率:W R V P 2502 o ==
(6)开关频率:kHz f s 10= (7)开关管 由于是小功率DC-DC 变换器,所以选用功率MOSFET 作为开关器件,MOSFET 的型号选择IRF250(V U DS 200=,A I D 30=,()Ω=085.0on DS R )。 (8)电感 电感的大小决定了开关电源主回路处于CCM 还是DCM 模式,由Buck 电路工作于电感电流连续状态下的条件: 21D RT L S -≥ (4-1) 得: S RT D L 2 1-≥ (4-2) 所以mH L 25.0≥,取mH L 1= (9)电容 电容的作用是保持恒定的输出电压,可根据允许的输出电压纹波值来选择电 容的大小: ()D T V L V C S o o -?=182 所以F C μ5.62=,取F C μ100= --------[1] 裴云庆,杨旭,王兆安.开关稳压电源的设计和应用[M].机械工业出版社,2010. [2] 英飞凌公司.IRF250 数据手册. [3] 巩鲁洪, 曹文思. 基于BUCK 变换器的建模与设计[J]. 科学之友,2008. 5. 扰动信号 占空比扰动:)2sin()(~t f d t d sd π= 其中: 005.05.01001=?≤d kHz kHz f sd 11010 1=?≤ 输入电压扰动:)2sin()(~t f u t u su in π= 其中: V V u 5.0501001=?≤kHz kHz f sd 11010 1=?≤ 负载扰动:)2sin()(~t f i t i si o π= 其中: A A I 05.051001=?≤kHz kHz f sd 11010 1=?≤ 6. 仿真因素 电路与小信号模型对比 输入电压小扰动)(~t u in
Matlab控制系统的数学建模 传递函数模型 ?相关函数 ◆S=tf(num,den):返回变量为s的连续系统传递函数模型。 ●Num为一个行向量,为传递函数的零点部分即分子,例:num=[1 1]:代 表s+1;num=[1 2 2]:代表s^2+2*s+2. ●Den为一个行向量,为传递函数的极点部分即分母,表达方法童num。 ◆S=tf(num,den,ts):返回变量s为离散系统传递函数模型,ts为采样周期。 ◆S=tf(‘s’):定义laplace算子,定义之后可以用原型式输入传递函数。 ◆S=tf(‘z’,ts):定义z变换算子以及采样时间,以原型式输入传递函数。 ◆Printsys(num,den,’s’):将系统传递函数以分式的形式打印出来,’s’表示传递函数 变量 ◆Pritnsys(num,den,’z’):将系统传递函数以分式的形式打印出来,’z’表示传递函数 变量 ◆Get(sys):可获得传递函数模型对象sys的所有信息 ◆Set(sys,’preperty’,value..):为系统不同属性设定值 ●例:延迟函数的设定 ?Set(g,’ioDelay’,4):表示在传递函数中加了exp(-4*s) ◆[num den]=tfdata(sys,’s’):以行向量的形式返回传递函数分子分母多项式 ◆C=conv(a,b):多项式a,b一系数行向量表示,进行相乘,结果c以系数行向量表 示 控制系统的零极点模型的建立 ?相关函数 ◆sys=zpk(z,p,k):的连续系统的零极点增益模型 ●z为一个列向量,表示系统的各个零点 ●p为一个列向量,表示系统的各个极点 ●k为一个数值,表示系统的系统增益注:这个不是传递函数的增益。 ◆sys=zpk(z,p,k,ts):的离散系统的零极点增益模型,采样时间为ts ◆s=zpk(‘s’):得到laplace算子,按原形式输入系统 ◆s=zpk(‘z’,ts):得到z变换算子和采样时间ts ◆[z,p,k]=zpkdata(sys,’v’):得到系统的零极点和增益,参数‘v’表示以向量形式表 示 ◆[p,z]=pzmap(sys):返回系统零极点 ◆Pzmap(sys):得到系统零极点分布图 控制系统的状态空间函数模型 x’(t)=A*x(t)+B*u(t) y(t)=C*x(t)+D*u(t) ?其中状态向量x(t)是n维,输入向量u(t)是m维,输出向量y(t)是p维,状态矩阵 A是n*n维,输入矩阵B是n*m维,输出矩阵是p*n维,对于一个时不变系统A, B,C,D都是常数矩阵。 ?ss函数 ?sys=ss(A,B,C,D):有A,B,C,D矩阵直接得到连续系统状态空间模型