注:本文为2011年全国大学生电子设计竞赛作品技术论文
帆板控制系统
(王威;朱世军;陈军学 荆州理工职业学院 434000)
摘 要:本系统是由平衡调节模块、风扇驱动模块、风机构执行模块、声光报警模块四部分组成的帆板控制系统。调节机构是基于TI 公司的MSP430F169单片机,具备角度设定、追踪角度、停止运行等功能;控制驱动机构采用专门的电机驱动芯片L298N ,为风扇提供强大的驱动能力,保障直流风扇的调速转动;执行机构为自制帆板。执行机构和驱动机构由调节机构来衔接组成帆板控制系统。该系统调节是基于PID 算法,进过反复的验证与调试使各项的指标保持在要求的范围内。 关键词:PID 、MSP430F169、SCA60C 、PWM
1. 系统方案论证
1.1 系统总体方案
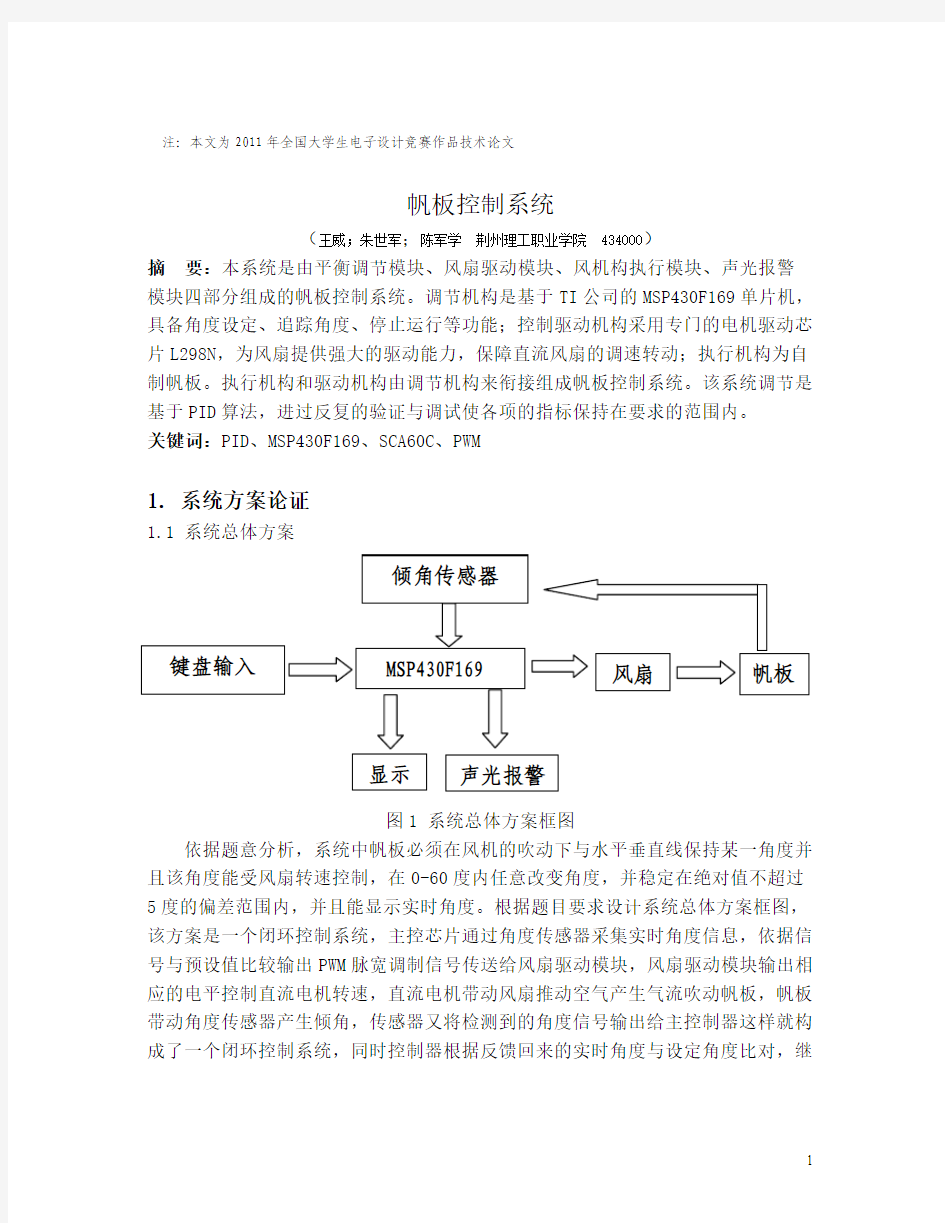
图1 系统总体方案框图
依据题意分析,系统中帆板必须在风机的吹动下与水平垂直线保持某一角度并且该角度能受风扇转速控制,在0-60度内任意改变角度,并稳定在绝对值不超过5度的偏差范围内,并且能显示实时角度。根据题目要求设计系统总体方案框图,该方案是一个闭环控制系统,主控芯片通过角度传感器采集实时角度信息,依据信号与预设值比较输出PWM 脉宽调制信号传送给风扇驱动模块,风扇驱动模块输出相应的电平控制直流电机转速,直流电机带动风扇推动空气产生气流吹动帆板,帆板带动角度传感器产生倾角,传感器又将检测到的角度信号输出给主控制器这样就构成了一个闭环控制系统,同时控制器根据反馈回来的实时角度与设定角度比对,继
MSP430F169
显示 倾角传感器
键盘输入
帆板
风扇
声光报警
续调整使帆板摆动至要求范围内。同时可通过键盘设定帆板倾角预置值,并通过LCD12864显示出实时角度值和设定角度值。
1.1.1主控芯片选择
方案一:采用TI公司的MSP430F449单片机。该款单片机特点是驱动能力强,能直接驱动段式液晶输出数据,功能齐全,性能稳定,但是运算速度一般,内部集成AD资源较少
方案二:采用TI公司的另一款芯片MSP430F169单片机,该芯片运算速度快,内部集成多个高精度时钟电路,内部集成12位A/D资源丰富,数据传输速率高,I/O口资源丰富、内部集成中断源丰富,并且能直接输出PWM脉宽调制信号、采用3.3V供电功耗极低,该芯片是一款性能绝佳的控制芯片,是我们在该项目中的首选。
1.1.2角度测量模块选择
方案一:采用Angtron-RE-25-V旋转编码器作为系统中的角度传感器,该款角度传感器灵敏度高、测量误差小、使用环境范围广、输出为数字信号不需A/D转换,但该型传感器价格较高、且易损坏;
方案二:线性角度电位器传感器“SAKAE”测量偏差5% 阻值100-50K 功率
2W,该款传感器测量偏差大、功耗大、并且相对运动产生摩擦影响帆板转动对系统精度产生极大影响;
方案三:采用SCA60C倾角传感器,该款传感器构造简单,外围电路极简,测量原理是内置绝缘介质随芯片倾角变化而与上下极板距离改变的电容,该变化引起电容上电压的变化,该电压信号经内部放大器放大输出,输出的电压值与角度的关系式为:sinθ=(2.5-v)/2,该款传感器具有功耗低、测量灵敏度高的特点,是首选器件。
1.2模型搭建
1.2.1电机与驱动模块的选择
依据题目要求可选用电脑机箱内的散热风扇,根据实际测试情况该风扇风速小,且气流方向与扇叶正面相反、不易控制、达不到赛题指标,故放弃该型风扇。经反复试验选用12V直流电机作为风机的动力,该直流电机功率强劲、可控性好、电压电流线性度好,成本较低、来源广。风叶选用质轻、直径小、气动性较好的玩具风扇转叶。驱动模块选用基于L298N的PCB板模块,制作PCB板焊接制成的,经实验对比,选用PCB板比用万用板手工焊接的性能要稳定可靠,因此选用该模块。
1.2.2帆板选择
选用质轻、厚度均一的KT板作为帆板,经试验该板比其他的板的气动性、稳定性要好。此前也选用过类似文件夹的塑料片但易变形,故选用KT板。
1.2.3声光报警电路
本系统还设计了一个角度调整声光提示,当帆板达到设定值±5%范围内时绿灯亮,当帆板还处于调整状态时红灯亮,并伴随蜂鸣器报警。
1.3 方案的实现
本方案采用TI公司MSP430F169作为主控芯片,选择SCA60C作为角度传感器,角度传感器与帆板同轴转动的方式与水平线保持平行并留有校正的余量,角度传感器电源线与信号线采用直径极细的漆包线与控制电路连接,防止导线的重量影响转轴自由转动。帆板选取轻薄的KT板材制作,帆板转轴与支架接触面选用滚动轴承作为支撑,以此减轻因转轴与支架间的摩擦带来的测量误差。风机选用12V直流电机带动风叶为系统提供合适的风力,风机驱动电路选取L298N为直流电机,提供驱动电能和PWM调速信号保证风机提供持续稳定的风力,同时单片机根据设定的角度值或经角度传感器采集的实时角度值,使用PID算法调整输出PWM脉宽调制信号,控制电机转速从而控制风速,使帆板稳定在设定角度的±5%范围内。声光报警模块根据角度传感器的实时信号提供角度调整提醒。
2. 单元电路实现与算法分析
2.1 风扇控制电路分析
系统中风扇控制电路主要由电机驱动电路和直流风扇构成,直流风扇为普通的直流风扇。电机驱动电路采用专门的电机驱动芯片L298N做的电机驱动电路。L298N 其输出电流为2A最大可达4A,最高工作电压为50V,完全能够满足系统中直流风扇的要求。
图2 L298N驱动模块电路
2.2 角度测量原理分析
角度的测量我们是根据垂直帆板与水平角度传感器相交于帆板的轴,故帆板绕轴旋转的角度度就等于角度传感器的倾斜角,从而监测帆板的θ角。角度测量采用SCA60C-N1000060型角度传感器,它有非常好的线性度,和非常高的精准度,当其在水平的位置时,输出电压为基准电压2.5V,每沿所能识别的角度的方向移动一个角度时就会产生一个与之对应的电压值,并成线性关系。采用MSP430F169单片机的内置12位ADC在角度传感器采集的每一个电压值都对应这一个角度值并在LCD12864上做相应的显示。θ=arcsin(2.5-v)/2,要注意的是,调用math.h中的arcsin函数进行计算时,得出是弧度,还应转换为角度,角度与弧度之间的关系为:角度=弧度*180/π,即θ=arc(sin(2.5-v)/2)*180/π。
2.3 声光报警模块
利用三极管的开关特性配合单片机制作的声光报警电路,对于测试稳定所用时间有很好的效果,当设定好确认角度后,LED红灯亮,蜂鸣器报警,当调整至设定范围内LED绿灯亮,蜂鸣器停止报警。
3. 软件设计与实现
3.1 软件设计流程图
图3 系统主程序流程图
3.2 软件算法及流程
3.2.1 MSP430F169内部A/D 转换
MSP430F169内部集成12位ADC ,能够直接进行A/D 转换,在内部程序进行时进行相应的误差处理,即进行多次采样,然后去掉最大值最小值之后再求平均值能够提高A/D 转换的稳定性与精度。 3.2.2 显示键盘接口模块
系统使用LCD12864作为显示器件,将采集到的角度传感器产生的线性电压,经过数据处理转换成角度进行实时角度显示,同时使用4个功能按键实现角度设定,分别接入单片机的4个外部中断接口,功能依次为 “+”、“-”、“45度”、“确认”,当有键按下后,进入中断服务子程序,通过判断标志位确定哪个键按下,执行相应功能。
3.2.3 PWM 控制的PID 算法
系统采用增量式PID 算法来实现帆板转角的稳定。将偏差的比例(P )/积分(D )通过线性组合构成控制量,用这一控制量对被控对象风帆进行控制从而达到控制角度的目的。这里使用增量式算法,并定义个参量如下
p
K 比例系数、i T 积分
常数、D T 微分常数、0u 常量、输出由于角度变化的所产生的电压控制增量k u ?
以下是计算公式:
01)()()()]}1()([)()({)(u n u n u n u u n e n e T
T
i e T T n e K n u D I p D n i P +++=+--++∑=
本执行机构使用其增量(直流电机),由上式得增量式控制算法公式:
)}
2()1(2)]([)1()({)1()()(-+--+--=--=?n e n e n e T T
n e n e K n u n u n u D P 此式适合用于本系统结构用直流电机作为执行机构的积分原件情况,它能自动
累加微处理器的每次输出角度增量)(n u ?,使角度能按控制量的逐步增大或减小。
T T K a T T K a T T T T K a D P D p D P -=+-=++
=2110),21(),1(
4. 调试方案与测试结果
4.1 测试步骤
4.1.1 测试电机的线性度
使用函数型号发生器输出一个已知频率和占空比,幅值为3.5V 的驱动信号,输出给电机驱动模块使其驱动电机扇动帆板,测试其PWM 脉宽频率与帆板转角的线性
关系。经实验测试数据列表绘图得出函数公式,试验电机PWM脉宽调制占空比与帆板角度的关系为Y=0.17X ,(Y:占空比的CCR0,X=帆板的夹角θ)
4.1.2 程序PID算法调试
调试按照先比例,后积分,再微分的步骤进行整定。本作品使用的是试凑法,通过实际运行观察系统对典型输入作用的响应曲线,然后根据各控制参数的系统的影响,反复调节试凑,直到达到满意的响应,从而确定PID各参数。最后调试确定P 值为0.25,I值为1.2,D值为0.2。
4.2 测试方案及结果
测试的手动帆板旋转角度的方法:将电子量角器固在作品具有具有码盘指针的方向。在实际测试时,为了得到更好的数据分析,每一度都做了反复的测量,限于论文版面的篇幅,摘取主要具有代表性的测量值。并记录与下表。
表1 设定角度与测量角度表
设定角度测量值码盘值偏差设定角度测量值码盘值偏差
0 0 0 0 35 35~36 35 1
5 5~
6 5 1 40 19~41 40 2
15 15~16 15 1 45 36~48 45 3
20 19~20 20 1 50 45~55 50 4
15 25~26 25 1 55 48~60 55 5
30 30~31 30 1 60 50~60 55 6
表2 任意间距测量角度及稳定时间表
角度显示实际偏差调整时间角度显示实际偏差调整时间
0 0 0 35 35 36 1 5
5 5 5 0 2 40 40 40 0 5
15 16 15 1 2 45 45 44 1 5
20 21 22 1 2 50 50 49 1 5
25 25~26 27 2 3 55 55 54 1 5
30 30 30 0 2 60 60 58 2 5
0 0 0 0 0 35 36 35 1 5 4.3 测试结果分析
从数据上看,系统总体达到较好的性能。调整时间主要取决于程序算法PID的比例、微分、积分值的调试。
5. 结论
本设计采用MSP430F169最小系统为控制核心,经过全面测试基本指标全部达到,这是一款具有特色的帆板控制系统,赛题的发挥部分我们的作品也基本达到要求。在比赛的过程当中我们也遇到了很多问题,比如直流电机的线性度测量,经过测量发现电机的脉宽调制电压与转速并非是一条直线,而是一条中间有许多转折点类试与直线的分段函数,其中还有程序算法涉及到PID算法等。这些问题我们都一一加以解决,我们的作品模型是经过队员们精心手工制做经过一个昼夜奋战终于打造出了一个符合测试要求、做工精细、美观的测试模型,该模型质量轻便、成本低廉、环保的产品。经过四天三夜奋战队员间相互默契配合、不断改进工艺和测试方法圆满的完成作品,通过这次比赛使我们深刻理解了团队精神、团队协作的重要性,同时对即将走向工作岗位的我们提供了较好的实践机会。
参考文献:
[1] 沈建华等.《MSP430系列16位超低功耗单片机实践与系统设计》[M].北京航空航天大学出版社,2008.
[2] 黄智伟.《全国大学生电子设计竞赛-电路设计》[M].北京航空航天大学出版社,2006.
[3] 张金.《电子系统设计实战》[M].电子工业出版社,2011.
[4] 黄友锐.《PID控制器参数整定与实现PID控制器参数整定与实现》[M].科学出版社,2010.
[5] 金发庆.《传感器技术与应用》[M].机械工业出版社,2009.
[6] 黄纪军. 《电子测量技术》[M].电子工业出版社,2009.
【喜讯】四川大学游泳队在第十九届全国大学生游泳锦标赛中再创佳绩 第十九届全国大学生游泳锦标赛于2019年8月24日-8月27日在中国·兰州举行。本届赛事由中国大学生体育协会主办,中国大学生体育协会游泳分会执行,兰州大学承办。共有有来自北京大学、清华大学、上海交通大学、复旦大学、同济大学、四川大学等50所高校近450名队员进行为期四天的比赛。 (领队、教练、裁判员与全体队员合影) 本次比赛我校游泳队由体育学院夏泽友书记担任领队,王晓均、曾宏广老师担任教练,共选派17名运动员参赛。 比赛中我校游泳健儿克服海拔1700-1800米高原反应的压力,努力拼搏,获得了甲组团体第五名优异成绩,创造我校游泳队参加全国大学生游泳比赛历史最好成绩。
(女子甲组) (男子甲组) 在本次比赛中,我校游泳健儿共获得了1枚银牌,3枚铜牌,6项第四名,3项第五名,4项第六名,1项第七名,5项第八名的优异成绩。四川大学游泳队还荣获本届比赛体育道德风尚奖。
(男子乙组) 为了在本次比赛中能获得优异的成绩,教练组带领全体运动员从2018年11月开始上课期间坚持每周6次训练,暑假坚持每周10次训练。队员们在训练中投入、坚韧,在赛场上拼搏、超越,展现出高水平运动员卓越的品质。 (队员们在比赛中) 获奖统计(单项): 名次获奖队员参赛项目 第二名黄超(公共管理学院)男子乙组200米蛙泳 第三名董嘉文(国际关系学院)男子甲组50米蛙泳
第三名林泽汉(华西药学院)男子乙组1500米自由泳第四名于浩(华西药学院)男子甲组200米自由泳第四名朱星睿(公共管理学院)女子甲组50米蛙泳第五名朱星睿(公共管理学院)女子甲组100米蛙泳第五名王欣妍(商学院)女子甲组100米自由泳第六名王欣妍(商学院)女子甲组200米自由泳第六名张潇潇(文学与新闻学院)女子甲组100米自由泳第六名林熙哲(文学与新闻学院)男子甲组200米仰泳第七名程嘉兴(网络空间安全学院)男子乙组200米仰泳第八名黄超(公共管理学院)男子乙组200米混合泳第八名王甲河(华西口腔医学院)男子甲组400米混合泳第八名陈钧涵(华西公共卫生学院)女子甲组200米仰泳第八名吴佳阳(华西公共卫生学院)女子甲组50米蝶泳获奖统计(接力赛): 名次获奖队员参赛项目 第三名王欣妍(商学院) 崔茜南(华西临床医学院) 朱星睿(公共管理学院) 张潇潇(文学与新闻学院) 女子甲组4*100米自由泳接力 第四名王欣妍(商学院) 张潇潇(文学与新闻学院) 陈钧涵(华西公共卫生学院) 朱星睿(公共管理学院) 女子甲组4*200米自由泳接力 第四名陈钧涵(华西公共卫生学院) 朱星睿(公共管理学院) 吴佳阳(华西公共卫生学院) 王欣妍(商学院) 女子甲组4*100米混合泳接力 第四名林熙哲(文学与新闻学院) 马思远(公共管理学院) 于浩(华西药学院) 邵伟恒(历史文化学院) 男子甲组4*100米自由泳接力
2016年中国技能大赛——第44届世界技能大赛全国选拔赛电气装置项目技术工作文件 2016年3月
说明:本文件为预发文件,操作技能竞赛模块及基本要求基本可确定,设备型号、图纸等待场地与器材供应商确定后再根据具体情况做相应部分调整。 2016年中国技能大赛——第44届世界技能大赛全国选拔赛 电气装置项目技术工作文件 1.电气装置项目技术描述 1.1 工作内容 本项目要求选手具有安装电工的操作技能。能够按照国家相关电气施工标准,根据施工图纸在模拟工作间内完成管路布局安装,电气线路安装,系统编程与调试。并能完成电气设备的检查与维护。 1.2 工作标准 电气装置项目竞赛中主要参照现行《电气设备安装工国家职业标准》二级,结合《维修电工国家职业标准》三级、《第43届世界技能大赛电气装置项目技术说明》以及企业生产实际和院校教学实际规范要求完成工作。 1.3 能力要求 1.3.1 商业、住宅及工业现场不同线路系统的安装 (1)在物体表面稳固的安装电缆、电缆有均匀的弯曲半径且不变形、电缆接入线槽及设备箱、盒时使用正确的终端配件等。 (2)在线槽、导管及柔性导管内安装绝缘导线或绝缘电缆。 (3)在电缆桥架(网孔式电缆桥架、或槽式电缆桥架)上安装并固定绝缘电缆。 (4)安装金属和塑料线槽。准确测量并制作指定长度和角度的线槽;正确装配多段线槽,连接处不变形,且尺寸误差、间隙控制在允许范围内;装配不同的终端配件,如在线槽上安装端盖;在物体表面上正确安装不同型号的线槽。 (5)安装金属和PVC导管。在物体表面稳固的安装导管;弯管半径均匀,且不小于4R,导管接入箱、板、槽时不变形,正确使用终端配件。 (6)安装金属和塑料柔性导管。在物体表面上稳固的安装柔性导管;弯管半径均匀,不使柔性导管变形;柔性导管接入箱、板、槽时,使用正确的终端配件。
毕业设计论文 水温自动控制系统 钟野 院系:电子信息工程学系 专业:电气自动化技术 班级: 学号: 指导教师: 职称(或学位): 2011年5 月
目录 1 引言 (2) 2 方案设计 (2) 2.1 总体系统的设计思路 (2) 2.2 部分外围系统的设计思路 (3) 3 硬件电路设计 (3) 3.1 单片机最小系统的设计 (3) 3.2 温度检测电路的设计与论证 (4) 3.3 显示功能电路的设计与论证 (5) 3.4 温度报警提示功能电路的设计与论证 (5) 3.5 外围电路控制设计 (6) 3.6 扩展部分方案设计 (7) 4 软件设计 (7) 4.1 控制主程序设计 (7) 4.2 温度设置程序设计 (8) 4.3 上下限报警程序设计 (8) 5 结论 (9) 结束语 (9) 致谢 (10) 参考文献 (10) 附录............................................................................................................... 错误!未定义书签。
水温自动控制系统 钟野 (XXXX电子信息工程学系指导教师:CXJ) 摘要:本文设计主要是采用A T89C51单片机为控制核心、以温度传感器(DS18B20)为温度采集元件, 外加温度设置电路、温度采集电路、显示电路、报警电路和加热电路来实现对水温的显示同时自动检测及线性化处理,其误差小于±0.5℃。本文重点介绍硬件设计方案的论证和选择,以及各部分功能控制的软件的设计。本次设计的目标在于:由单片机来实现水温的自动检测及自动控制,实现设备的智能化。 关键词:单片机;温度传感器;自动控制 Abstract: This paper is designed AT89C51 microcontroller as control core and temperature sensor DS18B20) for (temperature gathering element, plus the temperature setting circuit, temperature gathering electriccircuit, display circuit, alarm circuit and heating circuit to achieve water temperature display while automatically detecting and linearization, its error is less than 0.5 + ℃. This paper mainly introduces the hardware design argumentation and choice, and some functional control software design. This design goal is: by single-chip microcomputer to realize the automatic detection and automatic temperature control, realize the intellectualized equipment. Keywords: Microcontroller; Temperature sensors; Automatic control
毕业设计(论文) 帆板控制系统 姓名:xxxxxx 系别: 年级: 专业:电子信息工程 指导老师: 帆板控制系统
【摘要】本设计采用STC89C52RC为中心控制器,利用角度传感器来的采集、处理实现对风扇转速的控制,调节风力大小,进而改变帆板转角大小;帆板的角度检测,通过ADXL345模块,实现控制帆板角度的大小;通过充分比较、论证,最终选用小型直流电机作为风扇的制动源,小型直流电机力矩大、操作简单、价格低且能满足设计需求;系统显示采用LCD12864液晶,用于实时显示帆板的角度大小;控制电机是以NPN三极管BU406为驱动,再利用PWM算法算出合理的脉冲占空比;最后经过多次测试表明,系统完全达到了设计要求,不但完成了所有基本和发挥部分的要求,并增加实现了实时显示占空比全程变化的功能。 【关键词】自动控制、帆板、角度测量、小型直流电机、液晶显示、脉宽调制 Panel Control System 【Abstrct】According to the panel control system design requirements, to design the whole system was studied, established the optimal design scheme, using STC89C52RC as the center controller, using the angle sensor to the acquisition, processing of the fan speed control. The power adjustment, and then change the windsurfer windsurfing angle; angle detection. Through the ADXL345 module realization of control panel, in terms of size; by comparison, the final selection of full proof, small DC motor as the braking source fan, small DC motor torque, simple operation, low price and can satisfy the design requirement; display system using LCD12864, used for real-time display panel angle; control motor is NPN three. BU406 drive, then the use of PWM algorithm calculates the reasonable pulse duty ratio; finally after many tests show that.The system meets the design requirements, not only finished all the basic and the requirements to play a part, and to increase the real-time display of the whole function of the variation of duty ratio. 【Keywords】A utomatic Control, Windsurfing, Angle Measurement, Small DC Motor, Liquid Crystal Display, Pulse Width Modulation
2015年全国大学生游泳锦标赛 乙组成绩册 2015.11
新创纪录表 ============================================================================================================== 性别组别 项目 赛别 新纪录 类别 创造者 单位 日期 原纪录 -------------------------------------------------------------------------------------------------------------- 男子乙组A 200米 蛙泳 决赛 02:16.26 NUYA 毛飞廉 上海交大 2015-11-02 02:17.55 男子乙组A 200米 蛙泳 决赛 02:15.64 NUYA 张志豪 同济斐尼斯 2015-11-02 02:17.55 男子乙组A 200米 蛙泳 决赛 02:15.17 NUYA 闫子贝 中国地质 2015-11-02 02:17.55 男子乙组A 4X100米 自由泳接力 决赛 03:24.52 NUYA 胡以勇 上海交大 2015-11-02 03:24.76 钱智勇 汪顺 毛飞廉 女子乙组A 400米 自由泳 决赛 04:19.13 NUYA 崔卜丹 东南大学 2015-11-02 04:19.86 女子乙组A 400米 自由泳 决赛 04:15.35 NUYA 辛鑫 同济斐尼斯 2015-11-02 04:19.86 女子乙组A 400米 自由泳 决赛 04:14.80 NUYA 曹玥 山西大学 2015-11-02 04:19.86 女子乙组A 100米 仰泳 预赛 01:02.13 NUYA 程海花 首都经贸 2015-11-02 01:02.20 女子乙组A 100米 仰泳 决赛 01:01.22 NUYA 程海花 首都经贸 2015-11-02 01:02.13 女子乙组A 200米 蝶泳 决赛 02:10.44 NUYA 周羿霖 东南大学 2015-11-03 02:11.86 女子乙组A 200米 蝶泳 决赛 02:10.19 NUYA 张雨涵 中国地质 2015-11-03 02:11.86 ============================================================================================================== 汇总 人 队 次 项 -------------------------------------------------------------------------------------------------------------- 新创纪录 总计 9 1 11 5 男子 3 1 4 2 女子 6 7 3 超乙组A 男子 3 1 4 2 超乙组A 女子 6 7 3 ==============================================================================================================
北方民族大学学士学位论文论文题目:温度自动控制系统的设计 北方民族大学教务处制
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
帆板控制系统 摘要:本设计给出了以MSP430F149为核心的帆板控制系统的基本原理与实现方案。由倾角测量模块、电机驱动模块、显示模块、调节模块等模块组成。采用SCA103T倾角传感器,可实现倾角精确测量。采用直流电机驱动风扇。系统功能由按键控制,可对测量结果进行实时显示,人机交互界面友好,经测试,达到了较好的性能指标。 关键词:MSP430F149,倾角传感器,电机驱动 The Panels Control System Abstract: The basic principle and implements solutions of the control system of the panels are given using MSP430F149 as the core. It is composed by inclination measurement modules, motor driver module, display module and adjust module. It can realize precision measurement using the SCA103T tilt sensor. Fan is driver by the dc motor, The system function is controlled by keys and the measurement result can be real-time displayed, the system has good man-machine interface and achieved better performance indicators by test,. Keywords: MSP430F149,Inclination sensor,motor driver
【温馨提示】以下所有内容只是个人的理解,不具权威性,仅供参考。 1、电子电路的几类典型电路 个人认为:现在常规的电子电路常用的领域就是信号检测,因此我以传感器调理电路为例,将整个电子电路分成以下几个大类电路去学习和研究。 (1)信号产生电路; (2)检波电路; (3)放大电路(包括功放电路); (4)滤波电路; (5)转换电路; (6)电源电路。 然后对每类电路中不同的具体电路再进行细分,分别搭建后注意两个问题:第1,电路的输出与电路中的哪些参数有关,如果调节这些参数使输出满足要求;第2,功能相同的但实现方法不同的电路,区别在哪,也就是说它们的适用条件是什么? 2、参考书 (1)刘树棠译《基于运算放大器和模拟集成电路的电路设计》(第3版)西安交通大学出版社 (2)姚剑清译《运算放大器权威指南》(第3版)人民邮电出版社 (3)彭军译《测量电子电路设计——模拟篇》科学出版社 (4)彭军译《测量电子电路设计——滤波器篇》科学出版社 (5)何希才译《振荡电路的设计与应用》科学出版社 (6)陈梓城编《实用电子电路设计与调试》中国电力出版社 (7)邓学译《OP放大器应用技巧》科学出版社 3、
3、2011年全国电子大赛综合测评题仿真 可以对照搭建电路,我只是仿真了,实物没有弄。 3.1.1 题目 使用一片通用四运放芯片LM324 组成电路框图见图1(a ),实现下述功能:使用低频信号源产生的正弦波信号,加至加法器的输入端,加法器的另一输入端加入由自制振荡器产生的信号 ,如图1(b )所示, =0.5ms ,允许有±5%的误差。 图中要求加法器的输出电压11210o i i u u u += 。2i u 经选频滤波器滤除1o u 频率分量,选出0f 信号为2o u ,2o u 为峰峰值等于9V 的正弦信号,用示波器观察无明显失真。2o u 信号再经比较器后在1k Ω 负载上得到峰峰值为2V 的输出电压3o u 。 电源只能选用+12V 和+5V 两种单电源,由稳压电源供给。不得使用额外电源和其它型号运算放大器。
论文题目:温度自动控制系统的设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
摘要 随着网络技术的发展,Internet已成为最具市场潜力的技术领域,使用Web技术设计的数据库应用软件,是目前Internet市场的技术中坚,各种Web应用如电子商务,网上购物等都采用这种方式实现。 网上购书在国外已经是一个比较常见的购书方式了,而在我国,网上购书才是刚刚起步,但发展的速度却十分的惊人。本系统主要实现了用户的管理、书籍的查找与购买、购物车的实现、订单的管理以及用户留言等功能,为用户提供了迅速、便利的网上购书环境。 本系统采用JSP、Servlet、JavaBean和JDBC等一些JA V A Web相关技术实现了一个简单的网上购书系统,MVC开发模式可以分离数据访问和数据表现,让开发人员可以开发一个可伸缩性强的、便于扩展的控制器,来维护整个流程。本系统通用性强,经过简单的修改就可以应用于更广泛的网上购物系统,具有一定的推广价值。 关键词:书店;数据库;JSP;Servlet;JavaBean
Abstract With the development of network technology, Internet has become the most market potential of technology, the use of Web technology, designed for database application software, is the Internet market, the technical backbone of a variety of Web applications such as e-commerce, online shopping and so using this ways. Online textbook abroad is a relatively common textbook approach, while in China, online textbook is just started, but the pace of development was very amazing. This system mainly achieves the user's management, the search and the sale of books, shopping cart implementation, order management, and user comments and other functions, provides users with fast and convenient online friendly environment. In this system, JSP, Servlet, JavaBean, and JDBC and some other JA V A Web-related technology to achieve a simple online textbook system that versatility, MVC development model can be separated from data access and data performance, so developers can develop a strong scalability, scalable controller, to maintain the entire process. Through a simple modification can be applied to a wider range of online shopping system, with a certain extension purchase. Keywords: bookstore; database;JSP;Servlet;JavaBean
帆板控制系统 题目:帆板与控制系统组员: 指导老师: 时间:2014. 8. 11
摘要 随着社会的发展,智能化已经成为现代化产品发展的新趋势,帆板角度控制系统成为测量风力大小的产品,即可以节约电能,又可以把测量风力大小的设备向智能化产品方向过渡。 本系统采用SCT89C51单片机作为控制核心,利用角度传感器ADXL335、电机驱动L298N、液晶显示、键盘控制、声光报警等多个模块实现帆板控制系统。安置在帆板上的角度传感器将检测信号通过AD转换后传送给单片机控制系统,计算出帆板旋转角度,并由单片机控制液晶进行信息显示。帆板旋转角度可通过键盘设置风力等级,由单片机通过PWM方式驱动直流电机运转进行调速。配合角度传感器可以实时调节电机转速,进而带动风扇调整帆板转角。 测试结果证明,帆板控制系统运行稳定可靠,可以准确快速地调整帆板角度,液晶显示内容直观。
目录 第一章前言 (1) 第二章系统整体分析 (2) 2.1方案的论证 (2) 2.1.1输入模块的选择 (2) 2.2 系统的整体 (4) 第三章硬件电路 (6) 3.1 按键电路 (6) 3.2 主控电路 (6) 3.2.1振荡电路 (6) 3.2.2复位电路 (7) 3.3 风扇控制电路 (7) 3.4 显示电路 (8) 3.7 硬件系统 (9) 第四章软件系统 (10) 4.1 控制算法 (10) 4.2 角度测量原理 (10) 4.3.1 KEIL简介 (10) 4.3.2 Proteus简介 (10) 4.4 软件设计 (11) 第五章仿真与调试 (12) 5.1仿真 (12) 5.2测量 (13) 第六章总结 (18) 附录 (19)
2014年中国技能大赛——第43届世界技能大赛 全国选拔赛电气装置项目技术工作文件 1.电气装置项目技术描述 1.1 工作内容 本项目要求选手具有安装电工的操作技能。能够按照国家相关电气施工标准,根据施工图纸在模拟工作间内完成管路布局安装,电气线路安装,系统编程与调试。并能完成电气设备的检查与维护。 1.2 能力要求 1.2.1 商业、住宅及工业现场不同线路系统的安装 (1)在物体表面稳固的安装电缆、电缆有均匀的弯曲半径且不变形、电缆接入线槽及设备箱、盒时使用正确的终端配件等。 (2)在线槽、导管及柔性导管内安装绝缘导线或绝缘电缆。 (3)在电缆桥架(网孔式电缆桥架、或槽式电缆桥架)上安装并固定绝缘电缆。 (4)安装金属和塑料线槽。准确测量并制作指定长度和角度的线槽;正确装配多段线槽,连接处不变形,且尺寸误差、间隙控制在允许范围内;装配不同的终端配件,如在线槽上安装端盖;在物体表面上正确安装不同型号的线槽。 (5)安装金属和塑料导管。在物体表面稳固的安装导管;弯管半径均匀,且不小于4R,导管接入箱、板、槽时不变形,正确使用终端配件。 (6)安装金属和塑料柔性导管。在物体表面上稳固的安装柔性导管;弯管半径均匀,不使柔性导管变形;柔性导管接入箱、板、槽时,使用正确的终端配件。 (7)安装电缆桥架(槽式、网孔式)。在物体表面稳固的安装不同类型的电缆桥架(槽式、网孔式)。 (8)根据所给的施工说明(如布局图等),装配电气控制箱,该控制箱包含主开关、漏电保护器、小型断路器、控制设备(继电器、计时器等)、熔断器等。 (9)根据电路图,完成配电箱制作及内部端子接线,接线时要求不露铜,且安全牢固。 1.2.2 完成商业、住宅和工业中使用的不同控制装置和插座的安装。 (1)控制装置,如光电池、动作检测器、温度调节器和开关等。 (2)插座,如单相、三相等。 (3)根据提供的说明,安装和连接其它电器设备。
目录 摘要…………………………………………………………………第1章任务要求和方案设计…………………………………… 1.1 任务要求……………………………………………………… 2.1 总体方案确定及元件选择…………………………………….. 2.1.1 总体设计框图……………………………………………… 2.1.2 控制方案确定………………………………...…………… 2.1.3 系统组成……………………………………………… 2.1.4 单片机系统……………………………………….. 2.1.15 D/A转换........................................................................... 2.1.5 晶闸管控制………………………………………... 2.1.6 传感器……………………………………………… 2.1.7 信号放大电路………………………………………. 2.1.8 A/D转换……………………………………………. 2.1.9 设定温度及显示……………………………………. 第2章系统硬件设计……………………….…………………2.1 系统硬件框图……………………………………………2.2 系统组成部分之间接线分析…………………………… 第3章系统软件设计…………………………………………. 3.1程序流程图..…………………………………..…………… 第4章参数计算……………………………..………………... 4.1 系统各模块设计及参数计算 4.1.1、温度采集部分及转换部分
4.1.2、传感器输出信号放大电路部分:........................... 4.1.3、模数转换电路部分:............................ 4.1.4、ADC0804芯片外围电路的设计:....................... 4.1.5、数值处理部分及显示部分:............................. 4.1.6、PID算法的介绍....................................: 4.1.7、A/D转换模块.......................................... 4.1.7、A/D转换模块................................... 4.1.8 单片机基本系统调试............................... 4 .1. 9 注意事项:................................................................ 第5章测试方法和测试结果 5.1 系统测试仪器及设备 5.2 测试方法 5.3 测试结果 结束语........................................... 参考文献.…………………………………….……….……………
毕业设计论文 作者学号 系部 专业 题目 指导教师 评阅教师 完成时间:
毕业设计(论文)中文摘要
毕业设计(论文)外文摘要
目录 1 绪论 (1) 1.1J AVA语言的特点 (1) 1.2开发工具E CLIPSE介绍 (2) 1.3开发工具JDK介绍 (2) 1.4应用环境 (3) 2 系统需求分析 (3) 2.1需求分析 (3) 2.2可行性分析 (3) 3 系统概要设计 (4) 3.1游戏流程图 (4) 3.2设计目标 (5) 3.3系统功能模块 (5) 3.4系统数据结构设计 (7) 4 系统详细设计 (10) 4.1程序设计 (10) 4.2贪吃蛇游戏各功能界面截图 (13) 5 系统测试 (16) 5.1测试的意义 (16) 5.2测试过程 (16) 5.3测试结果 (17) 结论 (18) 致谢 (19) 参考文献 (19)
1 绪论 贪吃蛇是世界知名的益智类小游戏,选择这个题目一方面是为了将我们自己的所学知识加以运用;另一方面,我希望通过自己的所学知识把它剖析开来,通过自己的动手实践,真正的了解它的本质和精髓。希望通过这次实践,能从中提高自己的编程能力。并从中学会从零开始分析设计程序,达到学以致用,活学活用的目的。另外,通过本游戏的开发,达到学习Java技术和熟悉软件开发流程的目的。 本游戏的开发语言为Java,开发工具选用Eclipse。 Java是一种简单的,面向对象的,分布式的,解释型的,健壮安全的,结构中立的,可移植的,性能优异、多线程的动态语言。这里采用Java作为开发语言主要是基于Java的面向对象和可移植性。 Eclipse 是一个开放源代码的、基于 Java 的可扩展开发平台。就其本身而言,它只是一个框架和一组服务,用于通过插件组件构建开发环境。 1.1 Java语言的特点 1.1.1 简单性 Java与C++语言非常相近,但Java比C++简单,它抛弃了C++中的一些不是绝对必要的功能,如头文件、预处理文件、指针、结构、运算符重载、多重继承以及自动强迫同型。Java 实现了自动的垃圾收集,简化了内存管理的工作。 1.1.2 平台无关性 Java引进虚拟机原理,并运行于虚拟机,实现不同平台之间的Java接口。Java的数据类型与机器无关。 1.1.3 安全性 Java的编程类似C++,但舍弃了C++的指针对存储器地址的直接操作,程序运行时,内存由操作系统分配,这样可以避免病毒通过指针入侵系统。它提供了安全管理器,防止程序的非法访问。 1.1.4 面向对象 Java吸收了C++面向对象的概念,将数据封装于类中,实现了程序的简洁性和便于维护性,使程序代码可以只需一次编译就可反复利用。
第十三届全国运动会游泳竞赛规程 (修订版) 一、竞赛项目 (一)2017年全国游泳冠军赛暨全运会预选赛 50米、100米、200米、400米、800米、1500米自由泳;50米、100米、200米仰泳;50米、100米、200米蛙泳;50米、100米、200米蝶泳;200米、400米个人混合泳;4×100米、4×200米自由泳接力;4×100米混合泳接力;男女混合编组4×100米自由泳接力;男女混合编组4×100米混合泳接力。 (二)2017年全国夏季游泳锦标赛暨全运会预选赛 50米、100米、200米、400米、800米(限女子)、1500米自由泳(限男子); 100米、200米仰泳、100米、200米蛙泳; 100米、200米蝶泳;200米、400米个人混合泳。 (三)全运会决赛 50米、100米、200米、400米、800米自由泳(限女子)、1500米自由泳(限男子);100米、200米仰泳、100米、200米蛙泳;100米、200米蝶泳;200米、400米个人混合泳;4×100米、4×200米自由泳接力;4×100米混合泳接力。 二、运动员资格 (一)符合《第十三届全国运动会运动员注册和代表资格确定
办法》(体竞字[2014]11号)的有关规定。 (二)符合《第十三届全国运动会竞赛规程总则(草案)》(体竞字[2015]57号)的有关规定。 (三)符合《关于取消全运会、冬运会解放军两次计分政策和奥运会联合培养运动员奥运会成绩计入全运会政策后续问题处理意见的通知》(体竞字[2015]116号)的有关规定。 (四)业余运动员须符合以下条件: 1、中华人民共和国公民; 2、2017年度经县级以上医务部门检查证明身体健康; 3、未在中国游泳协会进行专业注册的游泳运动员,年龄14岁至35岁(1982年1月1日至2003年12月31日出生);在中国游泳协会注册的专业游泳运动员退役5年以上。 三、参加办法 (一)2017年全国游泳冠军赛暨全运会预选赛 1、在2016年全国游泳锦标赛、全国冬季游泳锦标赛中达到本次比赛报名标准(另行通知)的运动员可报名参赛。 2、在2017年全国春季游泳锦标赛中达到本次比赛达标标准(另行通知)的运动员可报名参赛。 3、在2016年国际泳联马拉松游泳世界杯赛国内运动员排名获得前20名的运动员。 4、凡参加了第31届奥运会的运动员(替补除外)可直接报名
2013年全国大学生电子设计竞赛四旋翼自主飞行器(B题) 【本科组】 2013年9月7日
摘要:本系统由数据采集、数据信号处理和飞行姿态和航向控制部分组成。 系统选用瑞萨R5F100LEA单片机作为主控芯片,对从MPU-6050芯片读取到的一系列数据进行PID算法处理并给飞行器的电调给出相应指令从而达到对飞行器的飞行姿态的控制。采用MPU-6050芯片采集四旋翼飞行器的三轴角速度和三轴角加速度数据。用红外传感器来检测出黑色指示线,以保证飞行器不脱离指定飞行区域及达到指定圆形区域。利用超声波传感器来检测飞行器与地面的距离,以保证飞行器能越过一米示高线。利用电磁铁来吸取和投放铁片。 关键词:瑞萨R5F100LEA单片机 MPU-6050模块红外传感器循迹电磁铁拾取铁片超声波测距 PID算法 1
目录 1系统方案 (3) 1.1控制系统的选择 (3) 1.2飞行姿态控制的论证与选择 (3) 1.3高度测量模块的论证与选择 (3) 1.4电机调速模块的选择 (3) 1.5循迹模块的方案选择 (3) 1.6薄铁片拾取的方案的论证与选择 (3) 1.7角速度与角加速度测量模块选择 (4) 2设计与论证 (4) 2.1控制方法设计 (4) 2.1.1降落及飞行轨迹控制设计 (4) 2.1.2飞行高度控制设计 (4) 2.1.3飞行姿态控制设计 (5) 2.1.4铁片拾取与投放控制设计 (5) 2.2参数计算 (5) 3电路与程序设计 (6) 3.1系统组成 (6) 3.2 原理框图与各部分电路图 (6) 3.2.1原理框图 (6) 3.3系统软件与流程图 (6) 4测试方案与测试结果 (7) 4.1测试方案 (7) 4.2测试条件与仪器 (7) 4.3测试结果分析 (7) 5结论 (8) 附录 (8) 附一:元器件明细表 (8) 附二:仪器设备清单 (8) 附三:源程序 (8) 2
自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院
2013年11月
目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28)
自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)(
①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s