路径规划的分类:
一、按路径维数
根据医学影像设备的不同,穿刺手术可以分二维和三维影像导航手术。所以根据应用场合的不同,路径规划也可分为二维路径规划和三维路径规划。
二维路径规划主要应用在超声、CT、X 射线等设备的导航手术中,三维路径规划则主要应用在三维超声、MRI 等设备的导航手术中。
二、按路径形式
根据穿刺路径特点,路径规划又可按照路径形式的不同分为: R 型、S 型、H 型和混合型,即整个路径包含两种以上不同路径形式组合。
三、按规划方向
由路径形式可以看出路径是可逆的,即理论上针可以从目标靶点沿原路返回穿刺至入针点。所以根据路径规划方向可分为正向规划和逆向规划。正向规划即从入针点到目标靶点的穿刺规划,逆向规划是利用针路的可逆性,从目标靶点出发穿刺可以选择的入针区域,来优化入针位姿和整个路径。
四、按规划算法
路径规划按算法大体可分为数值法、搜索法和反解法三大类。
五、算法概述
(一)数值法是通过数值计算的方法来优化路径,通常是利用目标函数的最大或最小值来得到最优路径的方
法。
1)概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。
2)目标函数法是考虑一些优化的指标(如路径最短,绕开障碍物等),建立目标函数,通过计算目
标函数得到最优解。
(二)搜索法是根据路径形式特点,利用计算机的人工智能搜索算法来搜索可行性路径。
1)路线图法主要思想是将自由空间转换成为一维线段所组成的网络,所要找的路径被局限在这个
网络之中,即将路径规划问题转化成图的搜索问题。
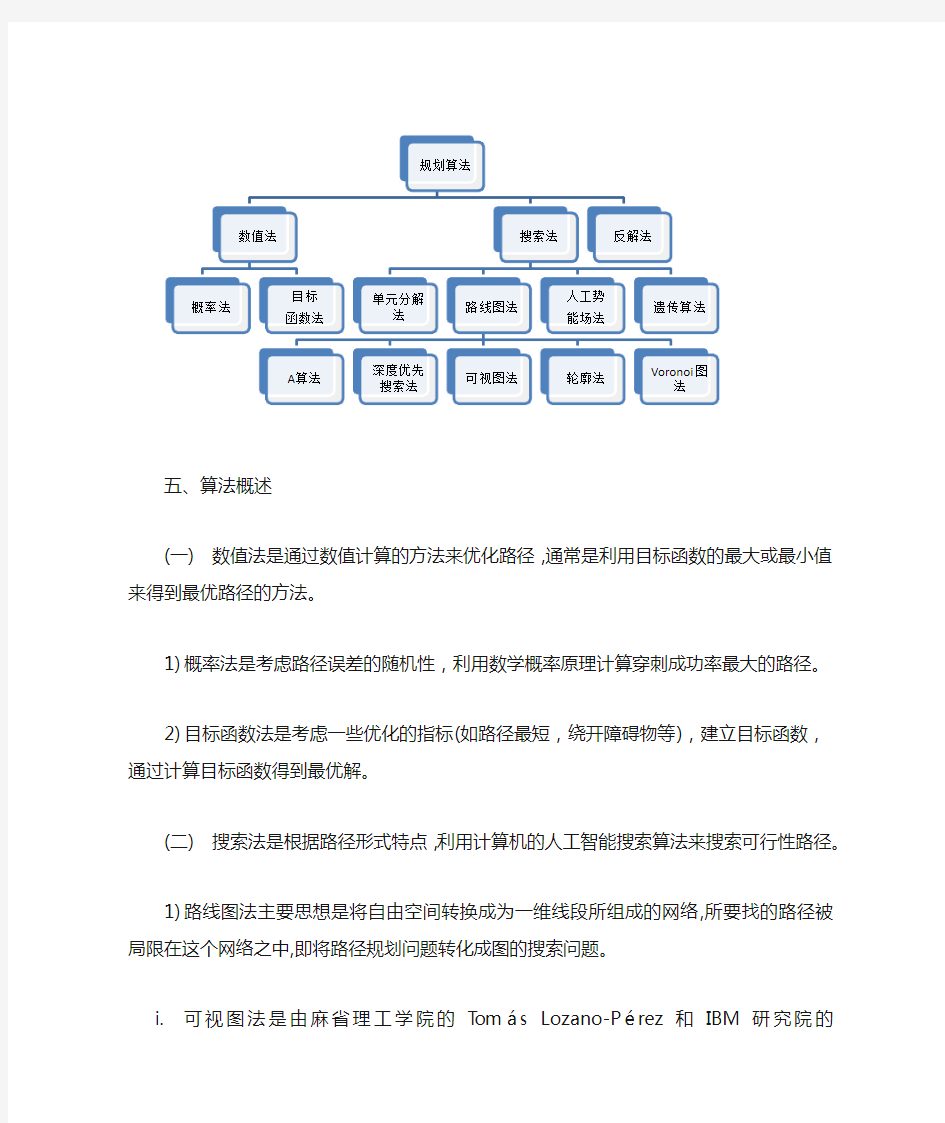
i.可视图法是由麻省理工学院的Tomás Lozano-Pérez和IBM研究院的MichaelA.Wesley
于1979年提出的。其最大特点是将障碍物用多边形包围盒来表达。图1表示某一环境
空间,s、g分别称为起始点和目标点。O1和O2表示两个障碍物。图2是构造出的对
应图1的可视图。利用搜索算法规划出从起始点至目标点的最优路径。
图1. 带两个障碍物环境图图2. 图1对应的可视图
2)单元分解法是把安全空间切分成不同大小的细格,用切割出的格子组成一条安全的路径,而格子
的大小是决定结果的关键。
3)人工势能场的的主要思想是创建一个综合势能场,其中目标对被规划物体产生吸引力,障碍物
对被规划物体产生排斥力,最后搜索势能最小方向即为最优路径方向。
4)遗传算法是一种高度并行的全局优化搜索算法,它的搜索不依赖于梯度信息,它将问题的求解表
示成染色体的适者生存的过程,通过染色体群的一代代不断进化,包括复制、交叉和变异等操作,
最终收敛到最适应环境的个体,从而求得问题的最优解或满意解。
(三)反解法是在给定入针和穿刺靶点( 及过渡点) 的状态的情况下,利用运动学反解来计算从入针点到靶
点的可行路径。
六、优缺点分析
(一)数值法计算较精确,可以得到最优路径;但相对来说数值法适应性较低,只适应单一的路径形式,或
者采用弧线,或者采用螺旋线,很少规划采用混合型路径,所以路径规划出的最优解还只是在某种特定路径形式下的最优解,并不是真正意义上的最优解,而且绝大多数没有考虑入针位态的优化。
(二)搜索法采用计算机人工智能搜索算法,但是不能保证最优。
1)单元分解法格子的大小是决定结果的关键,因此其算法的复杂性随精确度的增加成指数规律上
升。
2)人工势场法的缺点是存在局部最小点,导致机器人在最小点附近抖动,无法到达目标。
3)遗传算法具有简单通用、鲁棒性强、适于并行处理等显著特点。该方法的不足之处在于容易陷
入U型的障碍物空间,因此在实际应用中,如果环境中存在非突障碍物,还需要进一步结合其它全
局规划方法。
(三)反解法不能保证有解,更不能保证最优。
电子科技大学计算机学院标准实验报告 (实验)课程名称最短路径规划 电子科技大学教务处制表
实验报告 学生姓名:李彦博学号:2902107035 指导教师:陈昆 一、实验项目名称:最短路径规划 二、实验学时:32学时 三、实验原理:Dijkstra算法思想。 四、实验目的:实现最短路径的寻找。 五、实验内容: 1、图的基本概念及实现。 一、图的定义和术语 图是一种数据结构。 ADT Graph{ 数据对象V :V是据有相同特性的数据元素的集合,称为顶点集。 数据关系R : R={VR} VR={
机器人轨迹规划算法的分析 摘要: 本文根据机器人最优轨迹规划的约束与要求,采用了一种新的基于最小耗能的轨迹规划方法。该方法在传统的差分进化算法的基础上,采用样条插值法来获得机器人连续型的最优轨迹。通过MA TLAB软件建立机器人模型,并且编写了其轨迹规划的程序进行仿真。仿真结果表明,差分进化算法是一种性能优良的,具有高效性、并行性、鲁棒性等优点的轨迹规划方法。 1.引言 机器人技术是综合了力学、机械学、电子学、生物学、控制论、计算机、人工智能、系统工程等多种学科领域知识的高新技术,是当代研究十分活跃、应用日益广泛的一门学科。机器人的应用情况,也是一个国家工业自动化水平的重要标志。 机器人的轨迹规划属于底层规划,是在机器人手部运动学的基础上,讨论机器人运动过程中的轨迹和轨迹生成方法。在实际机器人运动规划过程中,机器人的一次作业任务可能要经过多个作业点,这就可能导致产生多个可能的结果。这时,就需要采用一种策略从这些结果中选出一个最优的路径。同时还需要意识到,机器人运动过程中各关节运动轨迹函数必须是连续和平滑的。此外,操作臂的运动也应该平稳,不平稳的运动会加速机器部件磨损,并且导致对操作臂的振动和冲击。这就要求寻找到一条最优的轨迹规划,使其满足多种约束条件和性能指标。通常研究中以最短时间、最小耗能或者机械臂扫过的扇形面积最小作为优化目标。本文所要研究内容是基于最小耗能性能指标的机器人轨迹规划。 2.机器人轨迹规划算法的介绍 1、A*搜索算法 A*算法是一种启发式的图搜索算法,可以在有限的条件中得到一个最优解,并可以在理论上保证全局最优解的收敛性,可以较好地满足轨迹规划问题中的各种约束条件。 A*算法的核心思想是建立启发函数: f(n)=g(n)+h(n)(2.1)式中,g(n)是从起始节点到当前节点n的实际代价值;h(n)是从当前节点n到目标节点的估计值。两者相加得到的就是当前节点的估计价值f(n),然后再对f(n)
城市规划分类 我国城市规划编制的完整过程由两个阶段、六个层次组成,即总体规划阶段和详细规划阶段;城市总体规划纲要、城市总体规划(含市域城镇体系规划和中心区域规划)、城市建设规划、分区规划、控制性详细规划和修建性详细规划。 城市的规模 按城市聚居人口大小可以区分城市规模大小,各国的具体分级标准不尽一致。联合国将2万人作为定义城市的人口下限,10万人作为划定大城市的下限,100万人作为划定特大城市的下限。这种分类反映了部分国家的惯例。中国在城市统计中对城市规模的分类标准如下:按市区非农业人口,20万人以下为小城市,20万人~50万人为中等城市,50万~100万人为大城市,100万人以上为特大城市 城市的发展目标 在城市发展战略和城市规划中所拟定的一定时期内城市经济、社会、环境的发展所应达到的目的和指标。 总体规划 一定年限内对城市市区、郊区及与城市发展有关的地区各项发展建设的综合部署。 城市总体规划是指城市人民政府依据国民经济和社会发展规划以及当地的自然环境、资源条件、历史情况、现状特点,统筹兼顾、综合
部署,为确定城市的规模和发展方向,实现城市的经济和社会发展目标,合理利用城市土地,协调城市空间布局等所作的一定期限内的综合部署和具体安排。城市总体规划是城市规划编制工作的第一阶段,也是城市建设和管理的依据。 任务 根据国家对城市发展和建设方针、经济技术政策、国民经济和社会发展的长远规划,在区域规划和合理组织区城城镇体系的基础上,按城市自身建设条件和现状特点,合理制定城市经济和社会发展目标,确定城市的发展性质、规模和建设标准,安排城市用地的功能分区和各项建设的总体布局,布置城市道路和交通运输系统,选定规划定额指标,制定规划实施步骤和措施。最终使城市工业、居住、交通和游憇四大功能活动相互协调发展。总体规划期限一般为20年。近期建设规划是总体规划的组成部分,是实施总体规划的阶段性规划。具体内容 ⑴确定城市性质和发展方向,估算城市人口发展规模,确定有关城市总体规划的各项技术经济指标。 ⑵选定城市用地,确定规划范围,划分城市用地功能分区,综合安排工业、对外交通运输、仓库、生活居住、大专院校、科研单位及绿化等用地。 ⑶布置域市道路、交通运输系统以及车站、港口、机场等主要交通运输枢纽的位置。
XXX幼儿园三年发展规划 一、情况分析 (一)幼儿园概况 1.本园创建于20XX年,是一所环境清幽,面积较小的幼儿园。占地面积560平方米,建筑面积共为460平方米。共设五个班级,大班两个,中班两个,小班一个,在园幼儿130多人。各项基础设施基本到位,具备整套安全监控安保装置及幼儿大型户外活动场地、玩具、器具等。 2. 教职工队伍。专任教师12人,其中学前教育专业教师4人,其余教师均为小学教师,学历为大专以上。 3.幼儿情况。我园招生对象为乡镇及周边乡村子女,其中留守儿童占80%,家长中的学历层次普遍较低。 (二)发展分析 1. 现有经验和成绩: (1)办园理念方面。我园有明确的办园理念、办园目标和培养目标,以“促进幼儿全面健康发展”为宗旨,以幼儿体智德美全面发展为目标,充分尊重、关注幼儿的个体差异,加强留守儿童的关注关爱,努力营造宽松、和谐、信任的人际环境,促进每一个幼儿富有个性、健康的人格形成,这为幼儿园的发展指明了前进的方向。 (2)条件设施方面。办园条件较好,现代化教育设施设备齐全,为幼儿园的发展提供了比较完备的物质保障。
(3)管理方面。制定各种制度,加强了目标管理、计划管理,各种计划已初步形成体系,不断完善园长负责制。为增强内部活力,制定了工资绩效分配方案,调动了教职工的工作积极性。 (4)教师人员方面。保教人员有较强的工作责任心,爱岗敬业、乐于奉献。近年来我园教师的思想、业务素质有不同程度的提高,她们能勤奋学习,积极进取,不断增强目标意识,教师之间能互相交流互相帮助,通过参观xx县机关幼儿园、xx中心幼儿园提升自己实践操作能力、遇到问题应变能力,同时参与网络研修,提升自己的知识储备量。教师在根据教育目标设计教育活动的基础发展到了更注重对幼儿的观察、评估上,教师有了初步的从幼儿中生成课程的意识。 2.存在问题和不足 (1)管理工作中需要进一步建全管理网络,增强目标意识和责任意识,使目标管理更规范、科学,并形成体系。要进一步强化园班子成员大局意识和协作意识,着力构建和谐的工作氛围。 (2)在保教工作方面,还存在重上课轻游戏倾向。课改精神学习不够,新的教育理念还没在教师身上内化,实际教育教学工作中存在着穿新鞋走老路的问题,小学化教育倾向严重。要进一步加强专题研究,认真梳理课程目标,使之更清晰。教师重视学习活动,但对主题活动主体框架中的有效活动还没有形成一定的经验积累。 (3)幼儿园文化环境创设方面,环境创设单一,没有特色。 (4)与自身规模相比较,人员的配置存在不足。
MATLAB实现基于蚁群算法的机器人路径规划 1、问题描述 移动机器人路径规划是机器人学的一个重要研究领域。它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。 2 算法理论 蚁群算法(Ant Colony Algorithm,ACA),最初是由意大利学者Dorigo M. 博士于1991 年首次提出,其本质是一个复杂的智能系统,且具有较强的鲁棒性,优良的分布式计算机制等优点。该算法经过十多年的发展,已被广大的科学研究人员应用于各种问题的研究,如旅行商问题,二次规划问题,生产调度问题等。但是算法本身性能的评价等算法理论研究方面进展较慢。 Dorigo 提出了精英蚁群模型(EAS),在这一模型中信息素更新按照得到当前最优解的蚂蚁所构造的解来进行,但这样的策略往往使进化变得缓慢,并不能取得较好的效果。次年Dorigo 博士给出改进模型(ACS),文中改进了转移概率模型,并且应用了全局搜索与局部搜索策略,来得进行深度搜索。Stützle 与Hoos给出了最大-最小蚂蚁系统(MAX-MINAS),所谓最大-最小即是为信息素设定上限与下限,设定上限避免搜索陷入局部最优,设定下限鼓励深度搜索。蚂蚁作为一个生物个体其自身的能力是十分有限的,比如蚂蚁个体是没有视觉的,蚂蚁自身体积又是那么渺小,但是由这些能力有限的蚂蚁组成的蚁群却可以做出超越个体蚂蚁能力的超常行为。蚂蚁没有视觉却可以寻觅食物,蚂蚁体积渺小而蚁群却可以搬运比它们个体大十倍甚至百倍的昆虫。这些都说明蚂蚁群体内部的某种机制使得它们具有了群体智能,可以做到蚂蚁个体无法实现的事情。经过生物学家的长时间观察发现,蚂蚁是通过分泌于空间中的信息素进行信息交流,进而实现群体行为的。 下面简要介绍蚁群通过信息素的交流找到最短路径的简化实例。如图2-1 所示,AE 之间有两条路ABCDE 与ABHDE,其中AB,DE,HD,HB 的长度为1,BC,CD 长度为0.5,并且,假设路上信息素浓度为0,且各个蚂蚁行进速度相同,单位时间所走的长度为1,每个单位时间内在走过路径上留下的信息素的量也相同。当t=0时,从A 点,E 点同时各有30 只蚂蚁从该点出发。当t=1,从A 点出发的蚂蚁走到B 点时,由于两条路BH 与BC 上的信息素浓度相同,所以蚂蚁以相同的概率选择BH 与BC,这样就有15 只蚂蚁选择走BH,有15 只蚂蚁选择走BC。同样的从E 点出发的蚂蚁走到D 点,分别有15 只蚂蚁选择DH 和DC。当t=2 时,选择BC 与DC的蚂蚁分别走过了BCD 和DCB,而选择BH 与DH 的蚂蚁都走到了H 点。所有的蚂蚁都在所走过的路上留下了相同浓度的信息素,那么路径BCD 上的信息素的浓度是路径BHD 上信息素浓度的两倍,这样若再次有蚂蚁选择走BC 和BH 时,或选择走DC 与DH 时,都会以较大的概率选择信息素浓度高的一边。这样的过程反复进行下去,最短的路径上走过的蚂蚁较多,留下的信息素也越多,蚁群这样就可以找到一条较短的路。这就是它们群体智能的体现。 蚁群算法就是模拟蚂蚁觅食过程中可以找到最短的路的行为过程设计的一种仿生算法。在用蚁群算法求解组合优化问题时,首先要将组合优化问题表达成与信息素相关的规范形式,然后各个蚂蚁独立地根据局部的信息素进行决策构造解,并根据解的优劣更新周围的信息素,这样的过程反复的进行即可求出组合优化问题的优化解。 归结蚁群算法有如下特点: (1)分布式计算:各个蚂蚁独立地构造解,当有蚂蚁个体构造的解较差时,并不会影响整体的求解结果。这使得算法具有较强的适应性; (2)自组织性:系统学中自组织性就是系统的组织指令是来自系统的内部。同样的蚁
一、为什么要学交通规划 二、交通规划定义、分类与层次划分 三、交通规划的主体内容与一般程序 四、我国城市交通规划发展回顾与展望 五、《交通规划》课程特点与学习要求
二、交通规划定义、分类与层次划分 1、什么是交通规划? 规划: (1)比较全面的长远的发展计划。(2)做规划。 ——《现代汉语词典》
1、什么是交通规划? 所谓交通规划,是指根据特定交通系统的现状与特征,用科学的方法预测交通系统交通需求的发展趋势及交通需求发展对交通系统交通供给的要求,确定特定时期交通供给的建设任务、建设规模及交通系统的管理模式、控制方法,以达到交通系统交通需求与交通供给之间的平衡,实现交通系统的安全、畅通与节能、环保的目的。 基础、任务、目的
2、交通规划分类与层次划分 法定规划——专业规划——专项规划——专题规划 根据交通规划涉及的对象和范围,通常分为两大类型: ◆区域交通系统规划(或称区域综合运输规划) ◆城市交通系统规划(或称城市综合交通规划)
◆区域交通系统规划 主要是指五大运输方式的发展规划,包括: ◆公路交通系统规划 ◆铁路运输系统规划 ◆航空运输系统规划 ◆水路运输系统规划 ◆管道运输系统规划
区域交通系统规划综合运输体系构建 ?区域运输系统规划是国土规划在交通运输领域的深化(即专业规划) ?国土规划是指对国土资源的开发、利用、整治和保护所指对国进行的综合性战略部署,也是对国土重大建设活动的综合空间布局,是以法律形式执行的强制性规划,国土规划必须经过所在地(省、市、县等)的人民代表大会通过,县级以上国土规划必须报请国务院批准才能实施。
文章编号 2 2 2 一种快速神经网络路径规划算法α 禹建丽? ∏ √ 孙增圻成久洋之 洛阳工学院应用数学系日本冈山理科大学工学部电子工学科 2 清华大学计算机系国家智能技术与系统重点实验室日本冈山理科大学工学部信息工学科 2 摘要本文研究已知障碍物形状和位置环境下的全局路径规划问题给出了一个路径规划算法其能量函数 利用神经网络结构定义根据路径点位于障碍物内外的不同位置选取不同的动态运动方程并针对障碍物的形状设 定各条边的模拟退火初始温度仿真研究表明本文提出的算法计算简单收敛速度快能够避免某些局部极值情 况规划的无碰路径达到了最短无碰路径 关键词全局路径规划能量函数神经网络模拟退火 中图分类号 ×°文献标识码 ΦΑΣΤΑΛΓΟΡΙΤΗΜΦΟΡΠΑΤΗΠΛΑΝΝΙΝΓ ΒΑΣΕΔΟΝΝΕΥΡΑΛΝΕΤ? ΟΡΚ ≠ 2 ? ? ≥ 2 ≥ ∏ ΔεπαρτμεντοφΜατηεματιχσ ΛυοψανγΙνστιτυτεοφΤεχηνολογψ Λυοψανγ
ΔεπαρτμεντοφΕλεχτρονιχΕνγινεερινγ ΦαχυλτψοφΕνγινεερινγ ΟκαψαμαΥνι?ερσιτψοφΣχιενχε 2 Ριδαι2χηο 2 ?απαν ΔεπαρτμεντοφΧομπυτερΣχιενχε Τεχηνολογψ ΣτατεΚεψΛαβοφΙντελλιγεντΤεχηνολογψ Σψστεμσ ΤσινγηυαΥνι?ερσιτψ Βει?ινγ ΔεπαρτμεντοφΙνφορματιον ΧομπυτερΕνγινεερινγ ΦαχυλτψοφΕνγινεερινγ ΟκαψαμαΥνι?ερσιτψοφΣχιενχε 2 Ριδαι2χηο 2 ?απαν Αβστραχτ ∏ √ √ √ × ∏ ∏ ∏ ∏ ∏ ∏ 2 ∏ √ × ∏ ∏ ∏ ∏ √ ∏ Κεψωορδσ ∏ ∏ ∏ 1引言Ιντροδυχτιον 机器人路径规划问题可以分为两种一种是基于环境先验完全信息的全局路径规划≈ 另一种是基于传感器信息的局部路径规划≈ ?后者环境是未知或者部分未知的全局路径规划已提出的典型方法有可视图法 ! 图搜索法≈ ! 人工势场法等可视图法的优点是可以求得最短路径但缺乏灵活性并且存在组合爆炸问题图搜索法比较灵活机器人的起始点和目标点的改变不会造成连通图的重新构造但不是任何时候都可以获得最短路径可视图法和图搜索法适用于多边形障碍物的避障路径规划问题但不适用解决圆形障碍物的避障路径规划问题人工势场法的基本思想是通过寻找路径点的能量函数的极小值点而使路径避开障碍物但存在局部极小值问题且不适于寻求最短路径≈ 文献≈ 给出的神经网络路径规划算法我们称为原算法引入网络结构和模拟退火等方法计算简单能避免某些局部极值情况且具有并行性及易于从二维空间推广到三维空间等优点对人工势场法给予了较大的改进但在此算法中由于路径点的总能量函数是由碰撞罚函数和距离函数两部分的和构成的而路径点 第卷第期年月机器人ΡΟΒΟΤ? α收稿日期
路径轨迹规划 (1)加减速控制简述 加减速控制算法的目标是建立加减速过程中速度相对于时间的函数关系式f=V(t)。 按照加减速控制算法与插补算法的先后位置关系,加减速控制方式可分为前加减速控制和后加减速控制。前加减速控制即插补计算前进行加减速运算,其优点在于对合成速度进行控制,不影响位置精度,但是需要预测减速点;后加减速控制即插补计算后进行加减速运算,它是对各插补轴分别进行加减速控制,由于各轴没有协调关系,因此合成位置可能不准确。后加减速控制只适用线性插补,在应用上有很大的局限性。 (2)几种速度控制模型 1)直线加减速速度控制模型 直线加减速是当机床启动、停止或者运动速速改变时,速度将按照一定斜率的直线上升或下降。 数学表达式为:at t +=0)(νν 直线加减速控制算法的主要优点是算法简单,机器人响应快,效率高,适合进行实时运算,但是机器人运动存在柔性冲击,速度的过渡不够平滑。 2)指数加减速速度控制模型 指数加减速是启动或停止时的速度发生突变,并且速度变化随时间按指数规律上升或下降。 速度数学表达式为: 加速时:)1()(τ t c e v t v --= 减速时:τ t c e v t v -=)( 加速度数学表达式为: 加速时:ττ t c e v t a -=)()( 减速时:ττ t c e v t a --=)()( 指数型加减速曲线的优点是数学表达式相对简单,可以实时计算,加减速结 束时加速度变小冲击变小;缺点是启动过程仍存在较大冲击。 2)S 曲线加减速速度控制模型 通过对启动阶段即高速阶段的加速度衰减,来保证电机性能的充分发挥和减小启动冲击。 正常情况下S 曲线加减速的运行过程分为7段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段、减减速段,如下图所示:
控规 控规是指控制性详细规划。 《城市规划编制办法》 第四节详细规划 第四十一条控制性详细规划应当包括下列内容: (一)确定规划范围内不同性质用地的界线,确定各类用地内适建,不适建或者有条件地允许建设的建筑类型。 (二)确定各地块建筑高度、建筑密度、容积率、绿地率等控制指标;确定公共设施配套要求、交通出入口方位、停车泊位、建筑后退红线距离等要求。 (三)提出各地块的建筑体量、体型、色彩等城市设计指导原则; (四)根据交通需求分析,确定地块出入口位置、停车泊位、公共交通场站用地范围和站点位置、步行交通以及其它交通设施。规定各级道路的红线、断面、交叉口形式及渠化措施、控制点坐标和标高。 (五)根据规划建设容量,确定市政工程管线位置、管径和工程设施的用地界线,进行管线综合。确定地下空间开发利用具体要求。 (六)制定相应的土地使用与建筑管理规定。 第四十二条控制性详细规划确定的各地块的主要用途、建筑密度、建筑高度、容积率、绿地率、基础设施和公共服务设施配套规定应当作为强制性内容。 控规在城市建设中的作用: 直接影响城市形态的规划层面。城市道路的线型、地块性质的调整都会直接影响这一街区的形态。而往往通过技术手段或者是从技术层面上说的最佳方往往又是最容易被城市规划执法者改变,或者说是各种利益体相互博弈的过程中不得不让步。 立法上控规是城市人民政府审批,也就是说修改不要通过人大。规划局代表市政府履行职责,那么也就是说控规的修改只要通过规划局就可以。 控制性详细规划是以城市总全规划或分区规划为依据,确定建设地区的土地使用性质和使用强度的控制指标、道路和工程管线控制性位置以及空间环境控制的规划要求。 控制性详细规划的主要任务是:以城市总体规划或分区规划为依据,确定建设地区的土地使用性质和使用强度的控制指标、道路和工程管线控制性位置以及空间环境控制的规划要求。 一、控制性详细规划 (一)现状资料与分析 调查了解上层次规划对本地区的规划要求及其现状基础资料,分析研究现状存在的主要问题及影响未来发展的主要因素,并作出评价。须收集以下基础资料: 1、总体规划或分区规划及各类专项规划对本地区的规划要求,相邻地段已批准的规划资料。 2、土地利用现状,用地分类至小类。
GIS 环境下的最短路径规划算法 ―――此处最短路理解为路径长度最小的路径 02计算机1班刘继忠 学号:2002374117 1.整体算法说明: 将图的信息用一个邻接矩阵来表达,通过对邻接矩阵的操作来查找最短路进,最短路径的查找采用迪杰斯特拉算法,根据用户给出的必经结点序列、起点、终点进行分段查找。 2.各函数功能及函数调用说明。 1).void Welcome() 程序初始化界面,介绍程序的功能、特点及相关提示 2) void CreatGraph(MGraph *G,char buf[]) 把图用邻接矩阵的形式表示,并进行 初始化。 3).int ShortestPath(MGraph *G,int jump,int end,int avoid[],int P[MAXSIZE][MAXSIZE],int Dist[],int ShPath[])根据用户给出的起点、终点、必经结点、避开结点进行最短路径的分段查找。 4).void Print(int jump,int end,int Dist[],int ShPath[]) 输出找到的最短路径所经的 结点和路径长度。 函数调用图: 3.各函数传入参数及返回值说明: 1).void Welcome() 无传入和返回值 2) void CreatGraph(MGraph *G,char buf[ ]) MGraph *G为主函数中定义的指向存放图的信息的指针变量。 char buf[ ]为主函数中定义的用来存放在图的相关信息录入时的界面信息的数组,以便以后调用查看各结点的信息。
无返回值。 3).int ShortestPath(MGraph *G,int jump,int end,int avoid[],int P[MAXSIZE][MAXSIZE],int Dist[ ],int ShPath[ ]) MGraph *G指向存放图的信息的指针变量。 int jump起点,int end终点,int avoid[ ] 避开结点序列。 int P[MAXSIZE][MAXSIZE]用来记录各点当前找到的最短路径所经过 的结点。 int Dist[ ] 记录各结点的当前找到的最短路径的长度。 int ShPath[ ]用来存放用户需要的最短路径所经的各结点。 返回最短路径查找是否成功的信息。(return SUCCEED;return ERROR)4).void Print(int jump,int end,int Dist[],int ShPath[]) int jump起点,int end终点。 int Dist[ ] 记录各结点的当前找到的最短路径的长度。 int ShPath[ ]用来存放用户需要的最短路径所经的各结点。 无返回值。 4.用户说明: ①源程序经编译连接后运行,出现程序的初始化界面,其内容为介绍程序的 功能、特点及相关提示。如下: Welcome to shortest path searching system. Instructions Function: 1. Personal travelling route choosing. 2. Assistan helper in city's traffic design. 3. Shortes path choose in the comlicated traffic net of the city. Characteristic: It is convient,you could set vital point you must travel,and the point you must avoid. Prompt: If the condition is too secret ,maybe there will have no path available. Designer: Liu jizhong. Complate-data: 2004. 3. 21 CopyRight: Shared program,welcome to improve it. Press anykey to enter the program... ②按任意键进入图的信息录入界面根据提示即可完成图的信息的录入。
XXX幼儿园三年发展规戈【」 一、情况分析 一)幼儿园概况 1.本园创建于20XX年,是一所环境清幽,面积较小的幼儿园。 占地面积560 平方米,建筑面积共为460平方米。共设五个班级,大 班两个,中班两个,小班一个,在园幼儿130 多人。各项基础设施基本到位,具备整套安全监控安保装置及幼儿大型户外活动场地、玩具、器具等。 2.教职工队伍。专任教师12人,其中学前教育专业教师4 人,其余教师均为小学教师,学历为大专以上。 3.幼儿情况。我园招生对象为乡镇及周边乡村子女,其中留守儿童占80%,家长中的学历层次普遍较低。 二)发展分析 1.现有经验和成绩: 1)办园理念方面。我园有明确的办园理念、办园目标和培养 目标,以“促进幼儿全面健康发展”为宗旨,以幼儿体智德美全面发展为目标,充分尊重、关注幼儿的个体差异,加强留守儿童的关注关爱,努力营造宽松、和谐、信任的人际环境,促进每一个幼儿富有个性、健康的人格形成,这为幼儿园的发展指明了前进的方向。 2)条件设施方面。办园条件较好,现代化教育设施设备齐全, 为幼儿园的发展提供了比较完备的物质保障。 3)管理方面。制定各种制度,加强了目标管理、计划管理, 各种计划已初步形成体系,不断完善园长负责制。为增强内部活力,制定了工资绩效分配方案,调动了教职工的工作积极性。
4)教师人员方面。保教人员有较强的工作责任心,爱岗敬业、 乐于奉献。近年来我园教师的思想、业务素质有不同程度的提高,她们能勤奋学习,积极进取,不断增强目标意识,教师之间能互相交流互相帮助,通过参观xx 县机关幼儿园、xx 中心幼儿园提升自己实践操作能力、遇到问题应变能力,同时参与网络研修,提升自己的知识储备量。教师在根据教育目标设计教育活动的基础发展到了更注重对幼儿的观察、评估上,教师有了初步的从幼儿中生成课程的意识。 2.存在问题和不足 1)管理工作中需要进一步建全管理网络,增强目标意识和责 任意识,使目标管理更规范、科学,并形成体系。要进一步强化园班子成员大局意识和协作意识,着力构建和谐的工作氛围。 2)在保教工作方面,还存在重上课轻游戏倾向。课改精神学 习不够,新的教育理念还没在教师身上内化,实际教育教学工作中存在着穿新鞋走老路的问题,小学化教育倾向严重。要进一步加强专题研究,认真梳理课程目标,使之更清晰。教师重视学习活动,但对主题活动主体框架中的有效活动还没有形成一定的经验积累。 3)幼儿园文化环境创设方面,环境创设单一,没有特色。 4)与自身规模相比较,人员的配置存在不足。
个人职业生涯规划三大类型 很多人都是在工作了一段时间后,才意识到职业生涯规划的重要性。其实 在你还没有意识到的时候,你的不少决定与行为就已经对你的职业生涯产生了 影响。不妨想想你是如何面对以下情况: 文理科分班时,高考填写入学志愿时,大学时代学业、社会活动的安排, 你是听信于父母、朋友、老师,凭自己的兴趣,或者随心所欲? 选择工作时,你是挑热门的行业,薪资高的工作,还是只图轻松? 工作中,你是“做一天和尚撞一天钟”,还是在为自己的未来做准备? 在处理职业问题时,每个人采用的方法不尽相同。有学者将职业生涯规划 类型分为三类:依赖型、直觉型、理性型。 A依赖型:依赖父母、朋友、老师,或遵从书本与社会舆论。 大部分中国学生从小只知道不断学习课本上的知识,在就业之前很少关注 与职业有关的事情。加之学校、社会也缺乏相关的教育与资讯,导致很多人都 不能正确处理可能影响到以后职业发展的问题:在很多地方的高中,都会认为读文科的人比较笨,于是文理分科时,不少人明明喜欢文科,屈从于社会舆论 会选择理科。填写大学志愿,听从父母、老师的安排,尽挑当时最热门的专业。我在帮客户做职业方向定位服务时,都会询问他们选择大学专业的原因,最常 见的回答就是“当初什么都不懂,父母帮我选的”,“觉得这个职业以后收入 不错”,迄今为止没有一个人是根据自己的兴趣能力自主选择的。考研、留学也不知道为了什么,只是因为身边的大部分人都这么做。 工作后很多人也想过,可无从下手。父母、朋友、书本说的都有道理,该听谁的呢?该作何决定呢?面对众多不尽相同的意见,当事人自己反而没了主意。 想起了一则杜撰的短文:联合国向全球青少年征文“对其它国家缺乏粮食 的主见”,结果美国人不知道什么叫“其它国家”,欧洲人不知道什么叫“缺乏”,非洲人不知道什么叫“粮食”,中国人不知道什么叫“主见”。 如果你不假思索地执行别人的建议,最终也要由你承担结果,毕竟只有你 才可以对自己的职业生涯负责。 所以说,在参考别人意见的同时,我们要有自己的主见。我们要学会解决 问题的思路方法,这比现成的答案更重要,正所谓“授人以鱼,不如授人以渔也。” B直觉型:凭自己的直觉、一时的喜好做出决定。
最短路径算法及其路径规划中的应用 摘要: 这篇文章把徒步运动的路径规划问题转化为求解图中任意两点间的最短路径问题,进而针对此问题介绍了Floyd算法,对该算法的时间花费进行分析,并介绍了在实际问题中如何灵活运用该算法解决路径决策中遇到的问题。 关键词:路径规划、最短路径、决策、Floyd算法 将实际地图的转化为有向图 在策划一次徒步旅行时,设计正确的旅行的线路特别重要,首先我们必须先要得到那个地区的地图,以便进行后续的线路规划。当我们拿到某一地区的地图时,我们可以把地图上的每一条线路用线段表示,用顶点表示地图上的岔路口,即多条线段的交点,这样就形成了一个由点和线段组成的图。我们可以在每条线段上标上数字,表示两点之间的实际距离,或者表示通过这条路径所需的时间。当然,如果两点之间没有线段相连,我们可以认为距离为无穷大,用∞表示。有时候某些线路是单向的,即只能从一个方向到另一个方向,不能逆行。这种情况在具体的路径设计中非常常见,比如,在繁华的都市内会有一些单行道,在山区景点中,常会出现一些上山索道,这些都是单向线路的常见例子。有时候,沿某条线路的两个方向所需的时间不同,这种例子更为常见,比如上山与下山,顺风与逆风等等。对于这两种情况,我们可以在表示路径的线段上加上箭头表示该路径的方向,形成有向图。 到达v2的距离为8,而从v2到v1的距离为3。 从点v1到v0的距离为5,而从v0到v1的距离 为∞。这种带有箭头的有向图,比不带箭头的无 向图能够表示更一般的情形,可以说无向图只是 有向图的一种特殊情况。 如果我们知道任意两点间的最短路径,这对 我们进行路径规划将会有很大的帮助,但当地图 较为复杂时,凭直觉估计最短路径的方法往往不 可靠,这时就必须借助计算机的强大计算能力,寻找最短路径。下面,我们就以 这种有向图为工具,来探究寻找最短路径的方法。
第4章机器人轨迹规划 本章在操作臂运动学和动力学的基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法。所谓轨迹,是指操作臂在运动过程中的位移、速度和加速度。而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹。首先对机器人的任务,运动路径和轨迹进行描述,轨迹规划器可使编程手续简化,只要求用户输入有关路径和轨迹的若干约束和简单描述,而复杂的细节问题则由规划器解决。例如,用户只需给出手部的目标位姿,让规划器确定到达该目标的路径点、持续时间、运动速度等轨迹参数。并且,在计算机内部描述所要求的轨迹,即选择习惯规定及合理的软件数据结构。最后,对内部描述的轨迹、实时计算机器人运动的位移、速度和加速度,生成运动轨迹。 4.1 机器人轨迹规划概述 一、机器人轨迹的概念 机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。 机器人在作业空间要完成给定的任务,其手部运动必须按一定的轨迹(trajectory)进行。轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。工业机器人轨迹规划属于机器人低层规划,基本上不涉及人工智能的问题,本章仅讨论在关节空间或笛卡尔空间中工业机器人运动的轨迹规划和轨迹生成方法。 机器人运动轨迹的描述一般是对其手部位姿的描述,此位姿值可与关节变量相互转换。控制轨迹也就是按时间控制手部或工具中心走过的空间路径。 二、轨迹规划的一般性问题 通常将操作臂的运动看作是工具坐标系{T}相对于工件坐标系{S}的一系列运动。这种描述方法既适用于各种操作臂,也适用于同一操作臂上装夹的各种工具。对于移动工作台(例如传送带),这种方法同样适用。这时,工作坐标{ S }位姿随时间而变化。 例如,图 4.1所示将销插入工件孔中的作业可以借助工具坐标系的一系列位姿
城市综合体发展规划分类 城市综合体作为城市的时尚客厅、潮流舞台,整合了深厚的城市 文化、多样的建筑空间、复杂的交通体系、丰富的商业业态,这种城 市商业地产开发建设的新模式越来越受到欢迎。本文以益阳市为例, 分析城市综合体不同功能需求下的类别。 一、研究思路 益阳市地处湖南省中北部,处于长株潭“3+5”城市圈和洞庭湖 生态经济圈交汇处,在“长沙1小时交通圈”内。城市形象为和谐宜 居的山水新城。人口规模2015年中心城区约63万,全市总人口约490万。益阳产业结构表现“二三一”格局,处于工业城市发展快速增长 阶段。经过对益阳中心城区土地利用的分析,城市土地存有以下问题:土地利用以居住、工业用地为主,公共管理与公共服务设施用地占城 市建设用地比例相对低,工业沿主要道路布置,工业用地与居住用地 混杂,居住环境品质不高,资江两岸大量土地被城中村、工业占用, 滨水土地未得到有效利用,未重视一江两岸的空间特色塑造,梓山湖 周边地区用地布局分散,以居住用地为主,缺乏旅游休闲用地,土地 利用率不高,老城区用地未延续传统空间肌理,缺少绿地、广场,环 境品质较差。
经过研究用地权属,梳理出现状可开发用地类型和分布情况:现状可开发利用类型为中心区、沿江及会龙山地区工业用地、棚户区、弃置地,现状可开发发展用地布局在会龙山地区、资江沿岸、益阳大道和金山路交叉口、益阳大道和桃花仑路交叉口、益阳大道和罗溪路交叉口,沿道路可开发用地布局在益阳大道、金山北路、桃花仑路、罗溪路、银城大道。现状道路交通网表现“两环两快、三纵四横”的网格状结构,路网体系不完善,缺少城市支路和跨河桥梁,新老城区联系不便;尚未形成丘陵城市特色的道路网格局;现状主干道较宽,缺少城市生活性主干道。城市公共设施主要由酒店、文化、教育、医疗、公园绿地构成,缺少城市、社区级设施,公共设施配套不健全,缺少市民休闲配套设施和生活服务设施。商业配套设施沿城市交通性主干道线性分布,未形成中心化的购物商圈,商业网点遍布,但缺乏规模集中、业态丰富的城市级商业综合体。现状已建、在建综合体共有15个,主要包括华天城市广场、雄森国际广场、银城大市场等,现有综合体类型以分散的超市、百货商场、大型商贸为主,类型模式单一,缺乏规模集中、业态丰富的城市级商业综合体。旅游资源丰富,但缺乏对旅游资源的整合和文化内涵的挖掘,缺少城区型、近郊型市民文化休闲旅游项目。城市拥有丘陵型山水资源,但不重视对梓山湖和资江两岸土地资源的综合利用。居住用地与工业用地混杂,缺乏山水城市的环境品质和风貌特色。总体来说,城市建设框架已拉开,易于彰显山水格局,地形地貌丰富,生态环境良好,经济发展迅速,可拉动城市建设,滨江资源丰富,利于塑造特色。 二、城市综合体的理解
路径规划的分类: 一、按路径维数 根据医学影像设备的不同,穿刺手术可以分二维和三维影像导航手术。所以根据应用场合的不同,路径规划也可分为二维路径规划和三维路径规划。 二维路径规划主要应用在超声、CT、X 射线等设备的导航手术中,三维路径规划则主要应用在三维超声、MRI 等设备的导航手术中。 二、按路径形式 根据穿刺路径特点,路径规划又可按照路径形式的不同分为: R 型、S 型、H 型和混合型,即整个路径包含两种以上不同路径形式组合。 三、按规划方向 由路径形式可以看出路径是可逆的,即理论上针可以从目标靶点沿原路返回穿刺至入针点。所以根据路径规划方向可分为正向规划和逆向规划。正向规划即从入针点到目标靶点的穿刺规划,逆向规划是利用针路的可逆性,从目标靶点出发穿刺可以选择的入针区域,来优化入针位姿和整个路径。 四、按规划算法 路径规划按算法大体可分为数值法、搜索法和反解法三大类。 五、算法概述 (一)数值法是通过数值计算的方法来优化路径,通常是利用目标函数的最大或最小值来得到最优路径的方 法。 1)概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。 2)目标函数法是考虑一些优化的指标(如路径最短,绕开障碍物等),建立目标函数,通过计算目 标函数得到最优解。 (二)搜索法是根据路径形式特点,利用计算机的人工智能搜索算法来搜索可行性路径。 1)路线图法主要思想是将自由空间转换成为一维线段所组成的网络,所要找的路径被局限在这个 网络之中,即将路径规划问题转化成图的搜索问题。 i.可视图法是由麻省理工学院的Tomás Lozano-Pérez和IBM研究院的MichaelA.Wesley 于1979年提出的。其最大特点是将障碍物用多边形包围盒来表达。图1表示某一环境 空间,s、g分别称为起始点和目标点。O1和O2表示两个障碍物。图2是构造出的对 应图1的可视图。利用搜索算法规划出从起始点至目标点的最优路径。
城乡规划的种类:城镇体系规划,城市规划,镇规划,乡规划,村庄规划 制定和实施城乡规划时应遵守的原则; 1.遵循城乡统筹,先规划后建设的原则; 2.防止污染和其它公害的原则; 3.保护生态环境,历史文化遗产和地方民族特色的原则; 4.符合区域人口发展,国防建设,防灾减灾的原则; 5.合理布局,节约用地,集约发展的原则; 历史文化名城保护规划编制的原则; 1,全面分析,因地制宜的原则; 2.保护与建设相协调的原则; 3.突出保护重点的原则; 城市新区开发的原则:量力而行的原则;统一规划,统一组织的原则;方便宜行的原则. 新区的开发类型:新市区的开发建设;经济开发区的建设;卫星城镇的开发建设;新工矿区的开发建设。 城市旧区改建原则:加强维护,逐步改建的原则;旧区改建与城市产业结构调整和工业企业技术改造的原则;旧区 改建与保护历史文物,名胜古迹相结合的原则。 城市绿地分类:公园绿地;生产绿地;防护绿地;附属绿地,其他绿地。 城市绿化规划的原则:城市绿化规划必须纳入城市总体规划;从实际出发,合理确定城市绿化规划指标。 绿化指标:人均公园绿地面积,城市绿化覆盖率,城市绿地率。 创建园林城市的法规有:国家园林城市标准和园林城市申报和审批办法。 城市绿化建设标准:(1)指标管理(2)道路绿化(3)居住区绿化(4)单位绿化(5)苗圃建设(6)城市全民义 务植树(7)立体绿化。 城市绿地的管理责任分工:城市公共绿地,风景林地,防护绿地,行道树及干道绿化带的绿化,由城市人民政府城 市绿化行政主管部门管理;各单位管界内的防护绿地的绿化,由该单位按照国家有关规定管理;单位自建的公园和 单位附属绿地的绿化,由该单位管理;居住区绿地的绿化,由城市人民政府城市绿化行政主管部门根据实际情况确 定的单位管理;城市苗圃,草圃和花圃等,由经营单位管理。 古树名木保护管理的原则:专业养护部门保护管理和单位,个人保护管理相结合的原则。 古树名木保护管理措施: (1)建立古树名木的确认,备案和档案制度。 (2)设立古树名木价值说明和保护标志。 (3)制定养护管理方案,落实养护管理责任制 (4)实行建设工程对古树名木的避让,保护措施。新建,改建,扩建的建设工程影响古树名木的生长的, 建设单位必须提出避让和保护措施。 (5)严禁砍伐和擅自移植古树名木,严格特殊情况下的移植批准程序。 风景名胜区的划分:国家级风景名胜区;省级风景名胜区。 风景名胜区总体规划的内容: (1)风景名胜区的评价。包括景源调查,景源筛选与分类,景源评分与分级,评价结论四部分。 (2)生态资源保护措施,重大建设项目布局,开发利用强度。 (3)风景名胜区的功能结构和空间布局。根据功能分区,确定土地利用规划,进行风景游赏组织。 (4)禁止开发和限制开发的范围。我国在“十一五”规划中明确提出了优化开发,重点开发, 限制开发和禁止开发的概念。生态薄弱和自然保护区域分别只是限制开发和禁止开发。 (5)风景名胜区的游客容量。风景区游人容量应随规划期限的不同而有变化,对一定规划范围的游人容量, 应综合分析并满足该地区的生态允许标准,游览心理标准,功能技术标准等因素而确定。 (6)有关专项规划。包括保护培育规划,风景游赏规划,典型景观规划,游览设施规划,基础工程规划, 居民社会调控规划,经济发展引导规划,土地利用协调规划,分期发展规划。 风景资源评价:景源调查,景源筛选与分类,景源评分与分级,评价结论四部分。风景名胜区的分区:生态保护区, 自然景观保护区,史迹保护区,风景恢复区,风景游览区,发展控制区。风景名胜区的分级:特级一级二级三级 保护区。风景名胜区建设是服从于风景资源保护这一首要任务的。风景名胜区的建设所追求的首先是社会效益和环境 效益,同时又要考虑经济效益。 风景名胜区建设的管理:可行性论证,建设用地管理,严格控制建设项目;建设项目的 审批程序;设计施工管理。城乡规划是指人民政府为了实现一定时期内本地区的经济和社会发展目标,事先依法制定 的用以确定城乡的性质规模和发展方向,城乡土地的合理利用,城乡的空间布局和城乡设施的科学配置的综合部署和 统一规划。城市是指国家按行政建制设立的,以非农产业和非农人口集聚为主要特征的居民点。公园绿地是指向公众 开放,以游憩为主要功能,兼具生态美化,防灾等作用的绿地。古树是指树龄在一百年以上的树木。名木是指国内外 稀有的以及具有历史价值和纪念意义,重要科研价值的树木。风景名胜区是指具有观赏,文化或者科学价值,自然景观,人文景观比较集中,环境优美,可供人们游览或者进行科学,文化活动的区域。风景资源指能引起审美及欣赏活动,可作为风景游览对象和风景开发利用的事物与因素的总称。游人容量是指单位时间,一定规划单元内所能容纳的游人数