
计算方法与实习实验报告
4.编写用追赶法解三对角线性方程组的程序,并解下列方程组:(1)
2X1-X2=5
-X1+2X2-X3=-12
-X2+2X3-X4=11
-X3+2X4=-1
#include
#include
void main(void)
{
doublei=0,j=0,k=0,x1,x2,x3,x4;
double a[4][5];
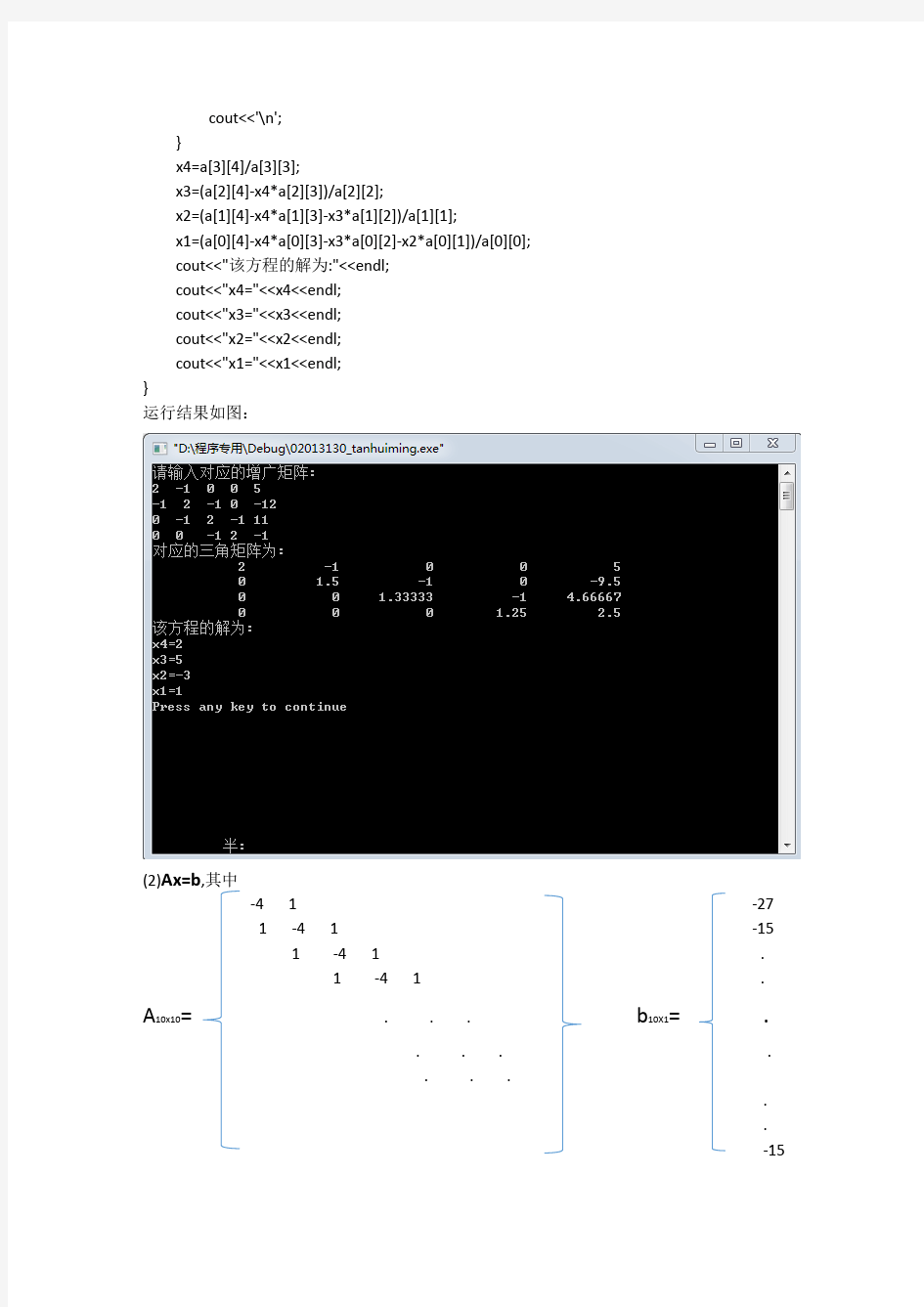
cout<<"请输入对应的增广矩阵:"< for(int z=0;z<4;z++) { for(int w=0;w<5;w++) { cin>>setw(12)>>a[z][w]; } } i=a[1][0]/a[0][0]; a[1][0]=a[1][0]-i*a[0][0]; a[1][1]=a[1][1]-i*a[0][1]; a[1][2]=a[1][2]-i*a[0][2]; a[1][3]=a[1][3]-i*a[0][3]; a[1][4]=a[1][4]-i*a[0][4]; j=a[2][1]/a[1][1]; a[2][1]=a[2][1]-j*a[1][1]; a[2][2]=a[2][2]-j*a[1][2]; a[2][3]=a[2][3]-j*a[1][3]; a[2][4]=a[2][4]-j*a[1][4]; k=a[3][2]/a[2][2]; a[3][2]=a[3][2]-k*a[2][2]; a[3][3]=a[3][3]-k*a[2][3]; a[3][4]=a[3][4]-k*a[2][4]; cout<<"对应的三角矩阵为:"< for( z=0;z<4;z++) { for(int w=0;w<5;w++) { cout< } cout<<'\n'; } x4=a[3][4]/a[3][3]; x3=(a[2][4]-x4*a[2][3])/a[2][2]; x2=(a[1][4]-x4*a[1][3]-x3*a[1][2])/a[1][1]; x1=(a[0][4]-x4*a[0][3]-x3*a[0][2]-x2*a[0][1])/a[0][0]; cout<<"该方程的解为:"< cout<<"x4="< cout<<"x3="< cout<<"x2="< cout<<"x1="< } 运行结果如图: (2)Ax=b,其中 -4 1 -27 1 -4 1 -15 1 -4 1 . 1 -4 1 . A10x10= . . .b10X1= . . . . . . . . . . -15 #include #include void main(void) { double i1,i2,i3,i4,i5,i6,i7,i8,i9,x1,x2,x3,x4,x5,x6,x7,x8,x9,x10; double a[10][11]; cout<<"请输入对应的增广矩阵:"< for(int z=0;z<10;z++) { for(int w=0;w<11;w++) { cin>>setw(12)>>a[z][w]; } } i1=a[1][0]/a[0][0]; a[1][0]=a[1][0]-i1*a[0][0]; a[1][1]=a[1][1]-i1*a[0][1]; a[1][2]=a[1][2]-i1*a[0][2]; a[1][10]=a[1][10]-i1*a[0][10]; i2=a[2][1]/a[1][1]; a[2][1]=0; a[2][2]=a[2][2]-i2*a[1][2]; a[2][3]=a[2][3]-i2*a[1][3]; a[2][10]=a[2][10]-i2*a[1][10]; i3=a[3][2]/a[2][2]; a[3][2]=0; a[3][3]=a[3][3]-i3*a[2][3]; a[3][4]=a[3][4]-i3*a[2][4]; a[3][10]=a[3][10]-i3*a[3][10]; i4=a[4][3]/a[3][3]; a[4][3]=0; a[4][4]=a[4][4]-i4*a[3][4]; a[4][5]=a[4][5]-i4*a[3][5]; a[4][10]=a[4][10]-i4*a[3][10]; i5=a[5][4]/a[4][4]; a[5][4]=0; a[5][5]=a[5][5]-i5*a[4][5]; a[5][6]=a[5][6]-i5*a[4][6]; a[5][10]=a[5][10]-i5*a[4][10]; i6=a[6][5]/a[5][5]; a[6][5]=0; a[6][6]=a[6][6]-i6*a[5][6]; a[6][7]=a[6][7]-i6*a[5][7]; a[6][10]=a[6][10]-i6*a[5][10]; i7=a[7][6]/a[6][6]; a[7][6]=0; a[7][7]=a[7][7]-i7*a[6][7]; a[7][8]=a[7][8]-i7*a[6][8]; a[7][10]=a[7][10]-i7*a[6][10]; i8=a[8][7]/a[7][7]; a[8][7]=0; a[8][8]=a[8][8]-i8*a[7][8]; a[8][9]=a[8][9]-i8*a[7][9]; a[8][10]=a[8][10]-i8*a[7][10]; i9=a[9][8]/a[8][8]; a[9][8]=0; a[9][9]=a[9][9]-i9*a[8][9]; a[9][10]=a[9][10]-i9*a[8][10]; for( z=0;z<10;z++) { for(int w=0;w<11;w++) { cout< } cout<<'\n'; } x10=a[9][10]/a[9][9]; x9=(a[8][10]-x10*a[8][9])/a[8][8]; x8=(a[7][10]-x9*a[7][8])/a[7][7]; x7=(a[6][10]-x8*a[6][7])/a[6][6]; x6=(a[5][10]-x7*a[5][6])/a[5][5]; x5=(a[4][10]-x6*a[4][5])/a[4][4]; x4=(a[3][10]-x5*a[3][4])/a[3][3]; x3=(a[2][10]-x4*a[2][3])/a[2][2]; x2=(a[1][10]-x3*a[1][2])/a[1][1]; x1=(a[0][10]-x2*a[0][1])/a[0][0]; cout<<"该方程的解为:"< cout<<"x10="< cout<<"x9="< cout<<"x8="< cout<<"x7="< cout<<"x6="< cout<<"x5="< cout<<"x4="< cout<<"x3="< cout<<"x2="< cout<<"x1="< } 运行结果如图: 心得: 本实验进一步加深了我对追赶法化简矩阵求解方程组的理解,认识到该方法的好处和不足,对后续学习帮助很大。 解线性方程组的迭代法 1.rs里查森迭代法求线性方程组Ax=b的解 function[x,n]=rs(A,b,x0,eps,M) if(nargin==3) eps=1.0e-6;%eps表示迭代精度 M=10000;%M表示迭代步数的限制值elseif(nargin==4) M=10000; end I=eye(size(A)); n=0; x=x0; tol=1; %迭代过程 while(tol>eps) x=(I-A)*x0+b; n=n+1;%n为最终求出解时的迭代步数tol=norm(x-x0); x0=x; if(n>=M) disp('Warning:迭代次数太多,可能不收敛!'); return; end end 2.crs里查森参数迭代法求线性方程组Ax=b的解 function[x,n]=crs(A,b,x0,w,eps,M) if(nargin==4) eps=1.0e-6;%eps表示迭代精度 M=10000;%M表示迭代步数的限制值 elseif(nargin==5) M=10000; end I=eye(size(A)); n=0; x=x0; tol=1; %迭代过程 while(tol>eps) x=(I-w*A)*x0+w*b; n=n+1;%n为最终求出解时的迭代步数tol=norm(x-x0); x0=x; if(n>=M) disp('Warning:迭代次数太多,可能不收敛!'); return; end end 3.grs里查森迭代法求线性方程组Ax=b的解 function[x,n]=grs(A,b,x0,W,eps,M) if(nargin==4) eps=1.0e-6;%eps表示迭代精度 M=10000;%M表示迭代步数的限制值 elseif(nargin==5) M=10000; end I=eye(size(A)); n=0; x=x0; tol=1;%前后两次迭代结果误差 %迭代过程 while(tol>eps) x=(I-W*A)*x0+W*b;%迭代公式 n=n+1;%n为最终求出解时的迭代步数tol=norm(x-x0); x0=x; if(n>=M) disp('Warning:迭代次数太多,可能不收敛!'); return; end end 4.jacobi雅可比迭代法求线性方程组Ax=b的解 function[x,n]=jacobi(A,b,x0,eps,varargin) if nargin==3 eps=1.0e-6; M=200; elseif nargin<3 error return elseif nargin==5 M=varargin{1}; end D=diag(diag(A));%求A的对角矩阵 L=-tril(A,-1);%求A的下三角阵 求解线性方程组的直接解法 5.2LU分解 ① Gauss消去法实现了LU分解 顺序消元结束时的上三角矩阵U和所用的乘数,严格下三角矩阵。 将下三角矩阵的对角元改成1,记为L,则有A=LU, 这事实是一般的,我们不难从消去的第k个元素时的矩阵k行及k列元素的 历史得到这一点.因为从消元的历史有 u kj=a kj-m k1u1j- m k2u2j -…- m k,k-1u k-1,j, j=k,k+1,…,n m ik=(a ik-m i1u1k- m i2u2k -…-m i,k-1u k-1,k>/u kk i=k+1,k+2,…,n 于是a kj=m k1u1j+m k2u2j+…+m k,k-1u k-1,j+u kj, j=k,k+1,…,n a ik=m i1u1k+m i2u2k+…+m i,k-1u k-1,k+m ik u kk i=k+1,k+2,…,n 从前面两个式子我们可以直接计算L和U(见下段>.将矩阵分解为单位下 三角矩阵和上三角矩阵之积称为矩阵的LU分解.顺序消元实现了LU分 解,同时还求出了g, Lg=b的解. ②直接LU分解 上段我们得到(l ij=m ij> u kj=a kj-l k1u1j-l k2u2j -…- l k,k-1u k-1,j, j=k,k+1,…,n l ik=(a ik-l i1u1k-l i2u2k -…-l i,k-1u k-1,k>/u kk i=k+1,k+2,…,n 2 诸元素对应乘积,只不过算L的元素时还要除以同列对角元.这一规律很 容易记住.可写成算法(L和U可存放于A>: for k=1:n-1 for j=k:n u kj=a kj-l k1u1j-l k2u2j -…- l k,k-1u k-1,j end for i=k+1:n l ik=(a ik-l i1u1k-l i2u2k -…-l i,k-1u k-1,k>/u kk end end 这一算法也叫Gauss消去法的紧凑格式,可一次算得L,U的元素,不需逐步 计算存储. 实验五 解线性方程组的迭代法 【实验内容】 对1、设线性方程组 ?? ? ? ?? ? ? ?? ? ? ?? ? ? ??-=???????????????? ?????????????????? ? ?--------------------------211938134632312513682438100412029137264 2212341791110161035243120 536217758683233761624491131512 013012312240010563568 0000121324 10987654321x x x x x x x x x x ()T x 2,1,1,3,0,2,1,0,1,1*--= 2、设对称正定系数阵线性方程组 ?? ? ????? ??? ? ? ??---=????????????? ??????????????? ??---------------------4515229 23206019243360021411035204111443343104221812334161 2065381141402312122 00240424 87654321x x x x x x x x ()T x 2,0,1,1,2,0,1,1*--= 3、三对角形线性方程组 ?? ? ?? ? ????? ??? ? ? ??----=???????????????? ?????????????????? ??------------------5541412621357410000000014100000000141000000001410000000014100000000141000000001410000000014100000000 14100000000 1410987654321x x x x x x x x x x ()T x 1,1,0,3,2,1,0,3,1,2*---= 试分别选用Jacobi 迭代法,Gauss-Seidol 迭代法和SOR 方法计算其解。 【实验方法或步骤】 1、体会迭代法求解线性方程组,并能与消去法加以比较; 2、分别对不同精度要求,如54310,10,10---=ε由迭代次数体会该迭代法的收敛快慢; 3、对方程组2,3使用SOR 方法时,选取松弛因子ω=0.8,0.9,1,1.1,1.2等,试看对算法收敛性的影响,并能找出你所选用的松弛因子的最佳者; 4、给出各种算法的设计程序和计算结果。 程序: 用雅可比方法求的程序: function [x,n]=jacobi(A,b,x0,eps,varargin) if nargin==3 eps=1.0e-6; M=200; 线性方程组的迭代法及程序实现 学校代码:11517 学号:200810111217 HENAN INSTITUTE OF ENGINEERING 毕业论文 题目线性方程组的迭代法及程序实现 学生姓名 专业班级 学号 系 (部)数理科学系 指导教师职称 完成时间 2012年5月20日河南工程学院 毕业设计(论文)任务书 题目:线性方程组的迭代法及程序实现专业:信息与计算科学学号 : 姓名一、主要内容: 通过本课题的研究,学会如何运用有限元方法来解决线性代数方程组问题,特别是Gaussie-Seidel迭代法和Jacobi迭代法来求解线性方程组。进一步学会迭代方法的数学思想,并对程序代码进行解析与改进,这对于我们以后学习和研究实际问题具有重要的意义。本课题运用所学的数学专业知识来研究,有助于我们进一步掌握大学数学方面的知识,特别是迭代方法。通过这个课题的研究,我进一步掌握了迭代方法的思想,以及程序的解析与改进,对于今后类似实际问题的解决具有重要的意义。 二、基本要求: 学会编写规范论文,独立自主完成。 运用所学知识发现问题并分析、解决。 3.通过对相关资料的收集、整理,最终形成一篇具有自己观点的学术论文,以期能对线性方程组迭代法的研究发展有一定的实践指导意义。 4.在毕业论文工作中强化英语、计算机应用能力。 完成期限: 2012年月指导教师签名:专业负责人签名: 年月日 目录 中文摘要....................................................................................Ⅰ英文摘要 (Ⅱ) 1 综述 1 2 经典迭代法概述 3 2.1 Jacobi迭代法 3 2.2 Gauss?Seidel迭代法 4 2.3 SOR(successive over relaxation)迭代法 4 2.4 SSOR迭代法 5 2.5 收敛性分析5 2. 6 数值试验 6 3 matlab实现的两个例题8 3.1 例1 迭代法的收敛速度8 3.2 例 2 SOR迭代法松弛因子的选取 12致谢16参考文献17附录19 作业六:分别编写用Jacobi迭代法和Gauss-Seidel迭代法求解线性方程组Ax=B的标准程序,并求下列方程组的解。 可取初始向量 X(0) =(0,0,0)’; 迭代终止条件||x(k+1)-x(k)||<=10e-6 (1) = (2) = Jacobi迭代法: 流程图 开 始 判断b中的最大值 有没有比误差大 给x赋初值 进行迭代 求出x,弱到100次还没到,警告不收 结束 程序 clear;clc; A=[8,-1,1;2,10,01;1,1,-5]; b=[1;4;3]; e=1e-6; x0=[0;0;0]'; n=length(A); x=zeros(n,1); k=0; r=max(abs(b)); while r>e for i=1:n d=A(i,i); if abs(d) 程序结果(1) (2) Gauss-Seidel迭代法: 程序 clear;clc; %A=[8,-1,1;2,10,01;1,1,-5]; %b=[1;4;3]; A=[5,2,1;-1,4,2;2,-3,10]; b=[-12;20;3]; m=size(A); if m(1)~=m(2) error('矩阵A不是方阵'); end n=length(b); %初始化 N=0;%迭代次数 L=zeros(n);%分解A=D+L+U,D是对角阵,L是下三角阵,U是上三角阵U=zeros(n); D=zeros(n); G=zeros(n);%G=-inv(D+L)*U d=zeros(n,1);%d=inv(D+L)*b x=zeros(n,1); for i=1:n%初始化L和U for j=1:n if i 第二章线性方程组的直接法 在近代数学数值计算和工程应用中,求解线性方程组是重要的课题。例如,样条插值中形成的关系式,曲线拟合形成的法方程等,都落实到解一个元线性方程组,尤其是大型方程组的求解,即求线性方程组(2.1)的未知量的数值。 (2.1)其中ai j,bi为常数。上式可写成矩阵形式Ax = b,即 (2.2) 其中,为系数矩阵,为解向量,为常数向量。当detA=D0时,由线性代数中的克莱姆法则,方程组的解存在且惟一,且有 为系数矩阵的第列元素以代替的矩阵的行列式的值。克莱姆法则在建立线性方程组解的理论基础中功不可没,但是在实际计算中,我们难以承受它的计算量。例如,解一个100阶的线性方程组,乘除法次数约为(101·100!·99),即使以每秒的运算速度,也需要近年的时间。在石油勘探、天气预报等问题中常常出现成百上千阶的方程 组,也就产生了各种形式方程组数值解法的需求。研究大型方程组的解是目前计算数学中的一个重要方向和课题。 解方程组的方法可归纳为直接解法和迭代解法。从理论上来说,直接法经过有限次四则运算,假定每一步运算过程中没有舍入误差,那么,最后得到方程组的解就是精确解。但是,这只是理想化的假定,在计算过程中,完全杜绝舍入误差是不可能的,只能控制和约束由有限位算术运算带来的舍入误差的增长和危害,这样直接法得到的解也不一定是绝对精确的。 迭代法是将方程组的解看作某种极限过程的向量极限的值,像第2章中非线性方程求解一样,计算极限过程是用迭代过程完成的,只不过将迭代式中单变量换成向量 而已。在用迭代算法时,我们不可能将极限过程算到底,只能将迭代进行有限多次,得到满足一定精度要求的方程组的近似解。 在数值计算历史上,直接解法和迭代解法交替生辉。一种解法的兴旺与计算机的硬件环境和问题规模是密切相关的。一般说来,对同等规模的线性方程组,直接法对计算机的要求 高于迭代法。对于中等规模的线性方程组,由于直接法的准确性和可靠性高,一般都用直接法求解。对于高阶方程组和稀疏方程组(非零元素较少),一般用迭代法求解。 §1 消元法 一、三角形方程组的解 形如下面三种形式的线性方程组较容易求解。 对角形方程组 (2.3)设,对每一个方程,。 显然,求解n阶对角方程的运算量为。 下三角方程组 (2.4) 直接法解线性方程组 实习题目: 仿照三对角方程组的追赶法解五对角方程组,其中系数矩阵为A,右端向量为:r。将A分解为LU。其中L为下三角,U为单位上三角。A为7*7阶的矩阵,其中对角元为4 5 6 7 8 9 10。上下次三角对角线元素为1 2 3 4 5 6 ;上下第二条对角线元素为1 2 3 4 5;右端项为:1 2 3 4 5 6 7. 要求:输出系数矩阵A,右端向量r,下三角矩阵L,单位上三角矩阵U,下三角矩阵Ly=b 的解向量y,单位上三角方程组Ux=y的解(即最终的解向量。保留七位小数。 实现方法:通过MATLAB编程实现。建立MATLAB脚本文件。 首先通仿照三对角方程组的追赶法得到五对角矩阵的实现算法。 然后又MATLAB编程实现。 实验结果(MATLAB截图): 结果分析: 通过提供的计算数据得到最终的解向量x及中间过程产生的下三角矩阵L,单位上三角矩阵U,下三角矩阵Ly=b 的解向量y。 同时为了确保算法的正确性,我还通过MATLAB的左除运算检验得使用此算法的计算结果正确。 这里由于是用MATLAB,最终结果为分数形式,考虑到精确解一般比近似解更好,因此未化成七位小数形式。 算法实现分析: 首先计算L和U的元素。由于已知L和U的特定形式(及除了对角线和上下次对角线和上下第二条对角线外,其余为0。故通过矩阵的乘法即可得到LU中元素的计算公式。(具体算法见MATLAB程序) 算法优劣点: 1.解此题时看上去要用较多的存储单元,但实际上只需存储系数矩阵A的不为0的元素。 2.A分解为LU计算完成后,后续计算x和y的“追赶过程”运算量一般来说计算量比较小。 3.此题也可用之前的LU算法求解。但此处算法与一般的LU分解的解线性方程组的算法,相比计算量小了不少。 4.对于此处特定的对称的系数矩阵A,算法还可以进一步优化。 5.由于我在此算法中A.L U的各对角值均用一个列向量表示,一个缺点在于输出A,L,U时要重新组成矩阵形式。不过优点在于减少了存储单元。 6.另一缺点是,未能将结果封装成一个文件。 后附MATLAB代码: c=[4,5,6,7,8,9,10];d=[1,2,3,4,5,6,0];b=[0,1,2,3,4,5,6];e=[1,2,3,4,5,0,0];a=[0,0,1,2,3,4,5]; r=[1 2 3 4 5 6 7]; w=zeros(7,1);x=zeros(7,1);y=zeros(7,1);m=zeros(7,1);n=zeros(7,1);h=zeros(7,1); w(1)=c(1);m(1)=d(1)/c(1);n(1)=e(1)/c(1); h(2)=b(2);w(2)=c(2)-h(2)*m(1);m(2)=(d(2)-b(2)*n(1))/w(2);n(2)=e(2)/w(2); for k=3:5 h(k)=b(k)-a(k)*m(k-2); w(k)=c(k)-a(k)*n(k-2)-h(k)*m(k-1); m(k)=(d(k)-h(k)*n(k-1))/w(k); n(k)=e(k)/w(k); end h(6)=b(6)-a(6)*m(4); w(6)=c(6)-a(6)*n(4)-h(6)*m(5); m(6)=(d(6)-h(6)*n(5))/w(6); h(7)=b(7)-a(7)*m(5); w(7)=c(7)-a(7)*n(5)-h(7)*m(6); y(1)=r(1)/w(1);y(2)=(r(2)-h(2)*y(1))/w(2); for k=3:7 y(k)=(r(k)-a(k)*y(k-2)-h(k)*y(k-1))/w(k); end x(7)=y(7); x(6)=y(6)-x(7)*m(6); 求解线性方程组——超松弛迭代法 #include cout<<"输入松弛因子w (1 追赶法求解三对角线性方程组 一 实验目的 利用编程方法实现追赶法求解三对角线性方程组。 二 实验内容 1、 学习和理解追赶法求解三对角线性方程组的原理及方法; 2、 利用MATLAB 编程实现追赶法; 3、 举例进行求解,并对结果进行分。 三 实验原理 设n 元线性方程组Ax=d 的系数矩阵A 为非奇异的三对角矩阵 11222=(1)(n 1)()()a c b a c A a n c b n a n ??????????--?????? ………… 这种方程组称为三对角线性方程组。显然,A 是上下半宽带都是1的带状矩阵。设A 的前n-1个顺序主子式都不为零,根据定理2.5的推论,A 有唯一的Crout 分解,并且是保留带宽的。 其中L 是下三角矩阵,U 是单位上三角矩阵。利用矩阵相乘法,可以1112212(1)1u(n 1)()()1l u m l u A LU l n m n l n ????????????????==?????--????????????…………… 得到: 由上列各式可以得到L 和U 。 引入中间量y ,令 y Ux =,则有: 已知 L 和d ,可求得y 。 则可得到y 的求解表达式: 11/1 2,3,,()(1)*y()=()[()(1)]/y d l i n m i y i li i di y i di m i y i li ==-+=--… 1111111/1(2)(1)(1)u (1)(11)/(1)(1)(1)l a l u c u c l mi bi i n a i m i i l i i n ci li ui ui ci li l i a i b i ui =*===≤≤+=+++≤≤-=?=+=+-+Ax LUx Ly d Ly d ====1112222(1)(n 1)(n 1)()()(n)(n)l y d m l y d l n y d m n l n y d ?????????????????????????=??????---?????????????????? …………… Gauss-Seidel迭代法求解线性方程组 一. 问题描述 用Gauss-Seidel 迭代法求解线性方程组 由Jacobi 迭代法中,每一次的迭代只用到前一次的迭代值。使用了两倍的存储空间,浪费了存储空间。若每一次迭代充分利用当前最新的迭代值,即在计算第i 个分量 ) 1(+k i x 时,用最新分量 ) 1(1 +k x , ???+) 1(2 k x ) 1(1 -+k i x 代替旧分量 ) (1 k x , ???) (2 k x ) (1 -k i x ,可以起 到节省存储空间的作用。这样就得到所谓解方程组的Gauss-Seidel 迭代法。 二. 算法设计 将A 分解成U D L A --=,则b x =A 等价于b x =--U)D (L 则Gauss-Seidel 迭代过程 ) ()1()1(k k k Ux Lx b Dx ++=++ 故 ) ()1()(k k Ux b x L D +=-+ 若设1 )(--L D 存在,则 b L D Ux L D x k k 1)(1)1()()(--+-+-= 令 b L D f U L D G 11)()(---=-=, 则Gauss-Seidel 迭代公式的矩阵形式为 f Gx x k k +=+) () 1( 其迭代格式为 T n x x x x ) ()0()0(2)0(1)0(,,,???= (初始向量), ) (1 1 1 1 1 )()1()1(∑∑-=-+=++--=i j i i j k j ij k j ij i ii i i x a x a b a x )210i 210(n k ???=???=,,,;,,, 或者 ?? ???--=???=???==?+=∑∑-=-+=+++) (1)210i 210(111 1)()1()1()()1(i j i i j k j ij k j ij i ii i i i k i k i x a x a b a x n k k x x x ,,,;,,, 三. 程序框图 《数值分析》课程设计追赶法解三对角方程组 院(系)名称信息工程学院 专业班级10普本信计 学号100111014 学生姓名刘银朋 指导教师张荣艳 2013 年05 月31日 数值分析课程设计评阅书 题目追赶法解三对角方程组 学生姓名刘银朋学号100111014 指导教师评语及成绩 指导教师签名: 年月日答辩评语及成绩 答辩教师签名: 年月日 教研室意见 总成绩: 教研室主任签名: 年月日 课程设计任务书 2012—2013学年第二学期 专业班级:10普本信息与计算科学学号:100111014 姓名:刘银朋 课程设计名称:数值分析Ⅰ、Ⅱ 设计题目:追赶法解三对角方程组 完成期限:自2013 年05月21 日至2013年05 月31日共10天 设计依据、要求及主要内容: 一、设计目的 理解追赶法,掌握追赶法的算法设计以及关于追赶法的分析和综合应用,能 够较熟练的应用Matlab软件编写求解追赶法的程序和应用Matlab软件数据库软 件. 二、设计内容 (1)认真挑选有代表性的三对角方程组. (2)认真梳理解三对角方程组的解题思路. (3)比较追赶法和高斯消去法的计算精度. 三、设计要求 1.先用Matlab数据库中的相应的函数对选定的方程,求出具有一定精度的解. 2.然后使用所用的方法编写Matlab程序求解. 3.对于使用多个方程解同意问题的,在界面上要设计成菜单的形式. 计划答辩时间:2013年06 月 5 日 工作任务鱼工作量要求: 查阅文献资料不少于3篇,课程设计报告1篇不少于3000字. 指导教师(签字):教研室主任(签字): 批准日期:2013 年05 月20 日 习题 3.1 1. 求下列方阵的秩: (1)??? ?? ??--340313021201;(2)????? ??----174034301320;(3)??????? ? ?---------12433023221453334 311 ;(4)??????? ??------34732038234202173132. 2. 求下列方阵的逆矩阵: (1) ?? ? ?? ? ?323513123; (2) ????? ?? ??-----1210232112201023. 3. 解下列矩阵方程 (1) 设 ???? ? ??--=????? ??--=1322 31,113122214B A ,求X 使B AX =; (2) 设 ??? ? ??-=? ???? ??---=132 321,433312120B A ,求X 使B XA =; (3) ?? ??? ??-=????? ??-=????? ??-=112510324, 123011113,1120111111C B A ,求X 使C AXB =. 4. 求下列行列式 (1)? ? ? ??? ??????71 1 0251020214214 ;(2)????????????-260523211213 141 2;(3)?? ? ???????---ef cf bf de cd bd ae ac ab ; (4) ????????????---d c b a 100110011001. 5. 判断下列线性方程组解的情况,如果有唯一解,则求出解. ???????=+++-=----=+-+=+++;01123,2532,242,5)1(432143214 3214321x x x x x x x x x x x x x x x x ? ? ???????=+=++=++=++=+;15,065,065,065,165)2(545434323212 1x x x x x x x x x x x x x (3) ? ?? ??=-++=-+-=-+-;3222, 2353, 132432143214321x x x x x x x x x x x x (4) ?????=---=--+=+++.034,0222,022432143214321x x x x x x x x x x x x 习题 3.2 1. 用回代法解上三角形线性方程组 (1)??? ????==+-=-+=++;63,3,6333,8484443432321x x x x x x x x x (2)?? ???? ?-=-=+--=+--=-+.63,1032,92,9244343242 1x x x x x x x x x 2. 用回代法解下三角形线性方程组 第4章解线性方程组的迭代法 用迭代法求解线性方程组与第4章非线性方程求根的方法相似,对方程组进行等价变换,构造同解方程组(对可构造各种等价方程组, 如分解,可逆,则由得到),以此构造迭代关系式 (4.1) 任取初始向量,代入迭代式中,经计算得到迭代序列。 若迭代序列收敛,设的极限为,对迭代式两边取极限 即是方程组的解,此时称迭代法收敛,否则称迭代法发散。我们将看到,不同于非线性方程的迭代方法,解线性方程组的迭代收敛与否完全决定于迭代矩阵的性质,与迭代初始值的选取无关。迭代法的优点是占有存储空间少,程序实现简单,尤其适用于大型稀疏矩阵;不尽人意之处是要面对判断迭代是否收敛和收敛速度的问题。 可以证明迭代矩阵的与谱半径是迭代收敛的充分必要条件,其中是矩阵的特征根。事实上,若为方程组的解,则有 再由迭代式可得到 由线性代数定理,的充分必要条件。 因此对迭代法(4.1)的收敛性有以下两个定理成立。 定理4.1迭代法收敛的充要条件是。 定理4.2迭代法收敛的充要条件是迭代矩阵的谱半径 因此,称谱半径小于1的矩阵为收敛矩阵。计算矩阵的谱半径,需要求解矩阵的特征值才能得到,通常这是较为繁重的工作。但是可以通过计算矩阵的范数等方法简化判断收敛的 工作。前面已经提到过,若||A||p矩阵的范数,则总有。因此,若,则必为收敛矩阵。计算矩阵的1范数和范数的方法比较简单,其中 于是,只要迭代矩阵满足或,就可以判断迭代序列 是收敛的。 要注意的是,当或时,可以有,因此不能判断迭代序列发散。 在计算中当相邻两次的向量误差的某种范数小于给定精度时,则停止迭代计算,视为方程组的近似解(有关范数的详细定义请看3.3节。) 4.1雅可比(Jacobi)迭代法 4.1.1 雅可比迭代格式 雅可比迭代计算 元线性方程组 (4.2) 写成矩阵形式为。若将式(4.2)中每个方程的留在方程左边,其余各项移到方程右边;方程两边除以则得到下列同解方程组: 记,构造迭代形式 迭代法解线性方程组作业 沈欢00986096 北京大学工学院,北京100871 2011年10月12日 摘要 由所给矩阵生成系数矩阵A和右端项b,分析系数矩阵A,并用Jacobi迭代法、GS迭代法、SOR(逐步松弛迭代法)解方程组Ax=b 1生成系数矩阵A、右端项b,并分析矩阵A 由文件”gr900900c rg.mm”得到了以.mm格式描述的系数矩阵A。A矩阵是900?900的大型稀 疏对称矩阵。于是,在matlaB中,使用”A=zeros(900,900)”语句生成900?900的零矩阵。再 按照.mm文件中的描述,分别对第i行、第j列的元素赋对应的值,就生成了系数矩阵A,并 将A存为.mat文件以便之后应用。 由于右端项是全为1的列向量,所以由语句”b=ones(900,1)”生成。 得到了矩阵A后,求其行列式,使用函数”det(A)”,求得结果为”Inf”,证明行列式太大,matlaB无法显示。由此证明,矩阵A可逆,线性方程组 Ax=b 有唯一解。 接着,判断A矩阵是否是对称矩阵(其实,这步是没有必要的,因为A矩阵本身是对称矩阵,是.mm格式中的矩阵按对称阵生成的)。如果A是对称矩阵,那么 A?A T=0 。于是,令B=A?A T,并对B求∞范数。结果显示: B ∞=0,所以,B是零矩阵,也就是:A是对称矩阵。 然后,求A的三个条件数: Cond(A)= A ? A?1 所求结果是,对应于1范数的条件数为:377.2334;对应于2范数的条件数为:194.5739;对应 于3范数的条件数为:377.2334; 1 从以上结果我们看出,A是可逆矩阵,但是A的条件数很大,所以,Ax=b有唯一解并且矩阵A相对不稳定。所以,我们可以用迭代方法来求解该线性方程组,但是由于A的条件数太大迭代次数一般而言会比较多。 2Jacobi迭代法 Jacobi迭代方法的程序流程图如图所示: 图1:Jacobi迭代方法程序流程图 在上述流程中,取x0=[1,1,...,1]T将精度设为accuracy=10?3,需要误差满足: error= x k+1?x k x k+1 数值分析实验五 班级: 10信计二班 学号:59 姓名:王志桃 分数: 一.实验名称 高斯-赛德尔迭代法解线性方程组 二.实验目的 1. 学会利用高斯赛德尔方法解线性方程组 2. 明白迭代法的原理 3. 对于大型稀疏矩阵方程组适用于迭代法比较简单 三.实验内容 利用Gauss-Seidel 迭代法求解下列方程组 ?????=++=-+=+-36123633111420238321 321321x x x x x x x x x , 其中取→=0)0(x 。 四、算法描述 由Jacobi 迭代法中,每一次的迭代只用到前一次的迭代值,若每一次迭代充分利用当前最新的迭代值,即在计算第i 个分量)1(+k i x 时,用最新分量)1(1+k x ,???+)1(2k x )1(1-+k i x 代替旧分量)(1k x ,???)(2k x )(1-k i x ,就得到所谓解方程组的Gauss-Seidel 迭代法。 其迭代格式为 T n x x x x )()0()0(2)0(1)0(,,,???= (初始向量), )(11111)()1( ) 1(∑∑-=-+=++--=i j i i j k j ij k j ij i ii i i x a x a b a x )210i 210(n k ???=???=,,,;,,, 或者写为 ?? ???--=???=???==?+=∑∑-=-+=+++)(1)210i 210(1111)( )1()1()()1(i j i i j k j ij k j ij i ii i i i k i k i x a x a b a x n k k x x x ,,,;,,, 五、 编码 #include 数值分析实验报告 0 a 12 K a 1,n 1 K a 2,n 1 U O M 则有: 第一步: Jacobi 迭代法 a 1n a 2n M , 则有: A D L U a n 1,n Ax b A A x D b L U (D L U)x b Dx (L U)x b x D (L U)x D b 令 J D (L U) 则称 J 为雅克比迭代矩阵 f D b 由此可得雅克比迭代的迭代格式如下: x (0) , 初始向量 x (k 1) Jx (k) f ,k 0,1,2,L 第二步 Gauss-Seidel 迭代法 Ax b (D L U )x b (D L)x Ux b x (D L) Ux (D L) b A D L U a 11 a 12 L a 1n a 11 A a 21 a 22 L a 2n a 22 M MM MO a n1 a n2 L a nn a 11 得到 D a 22 O a nn 由 a 21 0 M M O a n 1,1 a n 1,2 L 0 a nn a n1 a n2 L a n,n a 21 L M M O a n 1,1 a n 1,2 L a n1 a n2 L a n,n 1 a 12 K a 1,n 1 a 1n 0 K a 2,n 1 a 2n O M M a n 1,n 10 令 G (D L) U ,则称G 为Gauss-Seidel 迭代矩阵 f (D L) b 由此可得 Gauss-Seidel 迭代的迭代格式如下: x (0) , 初始向量 第三步 SOR 迭代法 w0 AD L U 1 ( D 1 wL ((1 w)D wU )) (D 1 wL) ((1 w)D wU ) w w w 令M w 1 (D wL), N 1 ((1 w)D wU )则有:A MN w w Ax b AM L W N M (M N )x b Mx Nx b x M Nx M b N M, 令W f Mb 带入 N 的值可有 L W ((1 w)D wU) (D wL) 1((1 w)D wU) (D wL) f 1 b w 1(D wL) 1b 1 (D wL) w 称 L W 为 SOR 迭代矩阵,由此可得 SOR 迭代的迭代格式如下: x (0) ,初始向量 二、算法程序 Jacobi 迭代法的 M 文件: function [y,n]=Jacobi(A,b,x0,eps) %************************************************* %函数名称 Jacobi 雅克比迭代函数 %参数解释 A 系数矩阵 % b 常数项 % x0 估计解向量 x (k 1) Gx (k) f ,k 0,1,2,L (k 1) f,k 0,1,2,L 解线性方程组的直接方法实验报告 解线性方程组的直接方法实验报告 1.实验目的: 1、通过该课题的实验,体会模块化结构程序设计方法的优点; 2、运用所学的计算方法,解决各类线性方程组的直接算法; 3、提高分析和解决问题的能力,做到学以致用; 4、通过三对角形线性方程组的解法,体会稀疏线性方程组解法的特点。 2.实验过程: 实验代码: #include "stdio.h" #include "math.h" #include using namespace std; //Gauss法 void lzy(double **a,double *b,int n) { int i,j,k; double l,x[10],temp; for(k=0;k { if(j==k) temp=fabs(a[j][k]); else if(temp temp=b[k]; b[k]=b[i]; b[i]=temp; } for(i=k+1;i 3)三对角形线性方程组 123456789104100000000141000000001410000000014100000000141000000001410000000014100000000141000000001410000000014x x x x x x x x x x -????????--????????--????--????????--????--????????--????--???????--??????-???? 7513261214455????????-?? ?? ??=??-?? ???? -?? ?????? ???-?? *(2,1,3,0,1,2,3,0,1,1)T x =--- 二、数学原理 设系数矩阵为三对角矩阵 1 122233111000000000 000000 n n n n n b c a b c a b A a b c a b ---?? ? ? ?= ? ? ? ? ?? ? 则方程组Ax=f 称为三对角方程组。 设矩阵A 非奇异,A 有Crout 分解A=LU ,其中L 为下三角矩阵,U 为单位上三角矩阵,记 1 122 233 1 10 00010 000 0001000 000100,00000000 00 0001n n n n b L U γαβγββγβ--???? ? ? ? ? ? ??== ? ? ? ? ? ? ? ? ? ??? ? ? ? 可先依次求出L ,U 中的元素后,令Ux=y ,先求解下三角方程组Ly=f 得出y ,再求解上三角方程组Ux=y 。 事实上,求解三对角方程组的2追赶法将矩阵三角分解的计算与求解两个三角方程组的计算放在一起,使算法更为紧凑。其计算公式为: 1111, 1111 ,111 ,2,3,,,1,2,,1i i i i i i i i i i i i i i n n i i i i c f b y i n c a b a f y y x y i n n x y x βγββαβγγβαβγ--+? ===?? =?? ?==-= ??? -?=?? =??=--?=-??对对(*) 三、程序设计 function x=chase(a,b,c,f) %求解线性方程组Ax=f,其中A 是三对角阵 %a 是矩阵A 的下对角线元素a(1)=0 %b 是矩阵A 的对角线元素 %c 是矩阵A 的上对角线元素c(n)=0 %f 是方程组的右端向量 n=length(f); x=zeros(1,n);y=zeros(1,n); d=zeros(1,n);u= zeros(1,n); %预处理 d(1)=b(1); for i=1:n-1 u(i)=c(i)/d(i); d(i+1)=b(i+1)-a(i+1)*u(i); end %追的过程 y(1)=f(1)/d(1); for i=2:n y(i)=(f(i)-a(i)*y(i-1))/d(i); end %赶的过程 x(n)=y(n); for i=n-1:-1:1 x(i)=y(i)-u(i)*x(i+1); endMATLAB代码 解线性方程组的迭代法
求解线性方程组的直接解法
常微分方程的解线性方程组的迭代法
线性方程组的迭代法及程序实现
数值分析5-用Jacobi迭代法和Gauss-Seidel迭代法求解线性方程组
线性方程组的直接法
直接法解线性方程组
求解线性方程组——超松弛迭代法(c)
追赶法求解三对角线性方程组
Gauss-Seidel迭代法求解线性方程组
追赶法解三对角方程组
第三章 解线性方程组的直接方法
数值计算_第4章 解线性方程组的迭代法
迭代法解线性方程组
高斯-赛德尔迭代法解线性方程组精选.
实验解线性方程组的基本迭代法实验
解线性方程组的直接方法实验报告
【良心出品】MATLAB 追赶法求解三对角方程组的算法原理例题与程序
相关主题
文本预览