一、课程教学目的
通过本课程学习,使学生对物理化学的内容和研究方法有较系统的理解和掌握,增强学生分析问题和解决问题的能力,并为进一步学习专业基础课和专业课打下基础。
二、课程教学基本要求
1.课程重点:
(1)判断化学变化的方向和限度问题。主要让学生掌握热力学的三个基本定律。
(2)掌握热力学基本定律在多组分体系、相平衡、化学平衡及电化学平衡等方面的应用。(3)掌握热力学基本定律在界面化学中的应用。
2.课程难点:
热力学第二定律,相平衡,电化学平衡。
3.能力培养要求:
通过本课程学习,使学生对物理化学的基本概念、原理、研究方法有较深入的认识和掌握,对物理化学学科中的科研发展前沿领域有所了解,培养物理化学方法论,独立分析问题、解决问题。
三、课程教学内容与学时
课堂教学(72学时)
1.绪论(1学时)
了解物理化学学科的对象、内容,研究方法,了解相关科研前沿,了解本学科与专业及生产的关系,掌握学习方法和要求。
2.热力学第一定律(7学时)
理解系统与环境、状态、状态函数、过程与途径等基本概念,了解可逆过程的概念。掌握热力学第一定律文字表述和数学表达式。
理解功、热、热力学能、焓、热容、摩尔相变焓、标准摩尔反应焓、标准摩尔生成焓、标准摩尔燃烧焓等概念。
掌握化学反应热效应,反应进度,等压热效应与等容热效应的关系,盖斯定律,几种基本热效应,生成热,燃烧热,溶解热。
3.热力学第二定律及热力学第三定律(10学时)
理解自发过程、卡诺循环、卡诺定理。
掌握热力学第二定律的文字表述和数学表达式。
理解熵、亥姆霍兹函数、吉布斯函数定义;掌握熵增原理、熵判据、亥姆霍兹函数判据、吉布斯函数判据。
掌握物质纯PVT变化、相变化中功、热、热力学能、焓、熵、亥姆霍兹函数、吉布斯函数的计算及热力学第一定律、热力学第二定律的应用。
掌握主要热力学公式的推导和适用条件。
掌握热力学基本方程和麦克斯韦关系式;理解推导热力学公式的演绎方法。
了解热力学第三定律,规定熵、标准熵,理解标准摩尔反应熵定义及计算。
理解摩尔反应吉布斯函数、标准摩尔反应吉布斯函数、标准摩尔生成吉布斯函数定义及应用。
4.非电解质溶液(10学时)
了解混合物与溶液的区别,会各种组成表示之间的换算。
理解拉乌尔定律、享利定律,掌握其有关计算。
理解稀溶液的依数性,并理解其应用。
理解偏摩尔量及化学势的概念。了解化学势判别式的使用。
理解理想液态混合物的定义,理解混合性质。
了解理想气体、真实气体、理想液态混合物、理想稀溶液中各组分化学势的表达式。
了解逸度、活度及活度系数的概念
5.化学平衡(6学时)
了解化学反应过程的推动力。
掌握标准平衡常数的定义。理解等温方程和范特霍夫方程的推导及应用。
掌握用热力学数据计算平衡常数及平衡组成的方法判断在一定条件下化学反应可能进行的方向,会分析温度、压力、组成等因素对平衡的影响。理解有溶液参加的多相化学反应等温方程式。
6.相平衡(12学时)
理解相律的意义、推导,掌握其应用。
掌握单组分系统、水的相图、物态转变方程式。理解克拉佩龙方程、克劳修斯――克拉佩龙方程,掌握其计算。
掌握二组分凝聚系统典型相图的分析和应用,包括液态完全互溶固态完全不互溶生成简单共晶的二元系,固态完全互溶的二元系,液态部分互溶的二元系,固态部分互溶的二元系(共晶型,包晶型),生成化合物的二元系,组元在固态具有晶型转变。
掌握用杠杆规则进行分析与计算。
了解由实验数据绘制简单相图的方法。
7.表面现象(8学时)
理解表面张力及表面吉布斯函数的概念。
理解接触角、润湿、附加压力的概念及其与表面张力的关系。
理解拉普拉斯公式及开尔文公式的应用。
理解亚稳状态与新相生成的关系。
理解物理吸附与化学吸附的含义和区别。
了解兰格缪尔单分子层吸附理论,理解兰格缪尔吸附等温式。
了解溶液界面的吸附及表面活性物质的作用与应用。
了解吉布斯吸附公式的含义和应用。
8.化学动力学(8学时)
理解化学反应速率、理解基元反应及反应分子数的概念。
反应速率系数以及反应级数的概念。
掌握通过实验确立速率方程的方法。
掌握一级、二级、n级反应的速率方程及其应用。
1999年招收攻读硕士学位研究生入学考试试题 考试科目: 金属学 适用专业: 科学技术史冶金物理化学钢铁冶金有色金属材料加工工程 说明:统考生做1~10题,单考生做1~7题和11~13题。 1、名词解释10分) (1)点阵畸变(2)组成过冷 (3)再结晶温度 (4)滑移和孪生(5)惯习现象 2、说明面心立方、体心立方、密排六方(c/a≥1.633)三种晶体结构形成的最密排面,最密排方向和致密度。(10分) 3、在形变过程中,位错增殖的机理是什么?(10分) 4、简述低碳钢热加工后形成带状组织的原因,以及相变时增大冷却度速度可避免带状组织产生的原因。(10分) 5、简要描述含碳量0.25%的钢从液态缓慢冷却至室温的相变过程(包括相变转换和成分转换)。(10分) 6、选答题(二选一,10分) (1)铸锭中区域偏析有哪几种?试分析其原因,并提出消除区域偏析的措施。 (2)固溶体结晶的一般特点是什么?简要描述固溶体非平衡态结晶时产生显微偏析的原因,说明消除显微偏析的方法。 7、简述金属或合金冷塑性变形后,其结构、组织和性能的变化。(10分) 8、简述经冷变形的金属或合金在退火时其显微组织,储存能和性能的变化规律。(10分) 9、选答题(二选一,10分) (1)为了提高Al-4.5%Cu合金的综合力学性能,采用了如下热处理工艺制度,在熔盐浴中505℃保温30分钟后,在水中淬火,然后在190℃下保温24小时,试分析其原因以及整个过程中显微组织的变化过程。 (2)什么叫固溶体的脱溶?说明连续脱溶和不连续脱溶在脱溶过程中母相成分变化的特点。 10、简述固溶强化,形变强化,细晶强化和弥散强化的强化机理。(10分) 11、简述影响再结晶晶粒大小的因素有哪些?并说明其影响的基本规律。(10分) 12、画出铁碳相图,并写出其中包晶反应,共晶反应和共析反应的反应式。(10分) 13、选做题(二选一,10分) (1)如果其他条件相同,试比较下列铸造条件下,铸件中晶粒大小,并分析原因。 a.水冷模浇铸和砂模浇铸 b.低过热度浇铸和高过热浇铸 c.电磁搅拌和无电磁搅拌 d.加入,不加入Al-Ti-B铅合金。 (2)什么叫形变织构?什么叫再结晶织构?简要说明形变织构,再结晶织构的形成机理。 2000年招收攻读硕士学位研究生入学考试试题 考试科目: 金属学 适用专业: 材料加工工程科学技术史 说明:统考生答1-10题,单考生答1-7题和11-13题。 1.名词解释(10分) 1相界面2相律3过渡相④菲克第一定律⑤退火织构 2.什么是固溶体?在单相合金中,影响合金元素的固溶度的因素有哪些?固溶体与组成固溶体
北京科技大学 2011--2012学年 第 二 学期 自动控制理论 试卷(A ) 院(系) 自动化 班级 学号 姓名 一、填空选择题(每空2分,共20分) 1、一阶系统11Ts 的调节时间s t = (5%误差)。 2、某单位反馈系统的开环脉冲传递函数为G(z),采样周期为T ,该系统的加速度误差系数K a = 。 3、PID 控制器的时域模型表达:( )。 4、对于离散系统,为了应用劳斯判据判断稳定性,必须引入一种从z 域到w 域的线性变换,写出此变换的表达式 。 5、附加 可改善系统的稳定性(A 、开环零点,B 、闭环零点)。 6、线性系统的传递函数与 有关(A 、输入,B 、系统的结构和参数,C 、初始状态)。 7、开环对数幅频特性的低频段反映了系统的 (A 、稳定性, B 、动态特性, C 、稳态误差, D 、抑制噪声能力) 。 8、最小相位系统一定是稳定的 (A.正确, B.错误) 。 9、180度根轨迹图是闭环系统特征方程的根(闭环极点)随开环传 装 订 线 内 不 得 答 题 自 觉 遵 守 考 试 规 则,诚 信 考 试,绝 不 作 弊
递函数中的某个参数由0变化到-∞时在s平面上留下的轨迹。(A.正确,B.错误) 。 10、以下几幅图是二阶系统的相平面图,请问那幅图存在稳定的奇点 。 (A) (B) (C) (D) 二、(12分)利用梅森增益公式,求传递函数() () C s R s 和() () E s R s 。
三、(15分)已知某单位负反馈系统的开环传递函数10()(0.010.2)G s s s =+。试分析: (1)系统是否满足超调量%5%σ≤要求? (2)若不满足要求,可采用速度反馈进行改进,画出改进后系统的结构图,并确定速度反馈的参数; (3)求出改进后系统在输入信号()2r t t =作用下的稳态误差。 装 订 线 内 不 得 答 题 自 觉 遵 守 考 试 规 则,诚 信 考 试,绝 不 作 弊
北京科技大学 2014年硕士学位研究生入学考试试题============================================================================================================= 试题编号:804 试题名称:物理化学A (共 5 页) 适用专业:材料科学与工程、材料工程(专业学位) 说明:1. 所有答案必须写在答题纸上,做在试题或草稿纸上无效。 2. 符号θ在右上角表示标准态, 例如pθ表示一个标准压力100 kPa,Eθ 表示标准电动势等。 ============================================================================================================= 一、选择题( 共18题,每题2 分,共36分) 1. 一可逆热机与一不可逆热机在其它条件都相同时, 燃烧等量的燃料, 则可逆热机牵引的列车行走的距离:( ) (A) 较长(B) 较短(C) 一样(D) 不一定 2. 向某溶剂中加入适量非挥发性溶质形成稀溶液后,导致沸点升高,说明该溶液中溶剂的化学势与未加溶质前溶剂的化学势相比发生了什么变化?( ) (A) 升高(B) 降低(C) 相等(D) 无法确定 3. 一定量的某理想气体从始态经向真空自由膨胀到达终态,可用下列哪个热力学判据来判断该过程的自发性:( ) (A) ?U (B) ?G (C) ?H (D) ?S 4. 对于下列平衡系统:①高温下水蒸气被分解;②同①,同时通入一些H2(g)和O2(g);③H2(g)和O2(g)同时溶于水中,其独立组元数K和自由度数f的值完全正确的是:( ) (A) ①K = 1,f = 1 ②K = 2,f = 2 ③K = 3,f = 3 (B) ①K = 2,f = 2 ②K = 3,f = 3 ③K = 1,f = 1 (C) ①K = 3,f = 3 ②K = 1,f = 1 ③K = 2,f = 2 (D) ①K = 1,f = 2 ②K = 2,f = 3 ③K = 3,f = 3 5. 已知反应2NO(g) + O2(g) = 2NO2(g) 是放热的,当该反应在某温度、压力下达平衡时,若使平衡向右移动,则应采取的措施是:( ) (A) 降低温度和减小压力(B) 降低温度和增大压力 (C) 升高温度和减小压力(D) 升高温度和增大压力 6. 将氧气分装在同一绝热气缸的两个气室内,其中左气室内氧气状态为p1=101.3 kPa, V1=2 dm3, T1=273.2 K,右气室内状态为p2=101.3 kPa, V2=1 dm3, T2=273.2 K;现将气室中间的隔板抽掉(忽略隔板厚度),使两部分气体充分混合,则此过程
北科大考研复试班-北京科技大学自动化学院控制科学与工程考研复 试经验分享 北京科技大学于1952年由天津大学(原北洋大学)、清华大学等6所国内著名大学的矿冶系科组建而成,现已发展成为以工为主,工、理、管、文、经、法等多学科协调发展的教育部直属全国重点大学,是全国首批正式成立研究生院的高等学校之一。1997年5月,学校首批进入国家“211工程”建设高校行列。2006年,学校成为首批“985工程”优势学科创新平台建设项目试点高校。2014年,学校牵头的,以北京科技大学、东北大学为核心高校的“钢铁共性技术协同创新中心”成功入选国家“2011计划”。2017年,学校入选国家“双一流”建设高校。2018年,学校获批国防科工局、教育部共建高校。 学校由土木与资源工程学院、冶金与生态工程学院、材料科学与工程学院、机械工程学院、能源与环境工程学院、自动化学院、计算机与通信工程学院、数理学院、化学与生物工程学院、东凌经济管理学院、文法学院、马克思主义学院、外国语学院、高等工程师学院,以及研究生院、体育部、管庄校区、天津学院、延庆分校组成。现有20个一级学科博士学位授权点,30个一级学科硕士学位授权点,79个二级学科博士学位授权点,137个二级学科硕士学位授权点,另有MBA(含EMBA)、MPA、法律硕士、会计硕士、翻译硕士、社会工作、文物与博物馆和工程硕士等8个专业学位授权点,16个博士后科研流动站,50个本科专业。学校冶金工程、材料科学与工程、矿业工程、科学技术史4个全国一级重点学科学术水平蜚声中外(2017年进入国家世界一流学科建设行列;在第四轮学科评估,冶金工程、科学技术史获评A+,材料科学与工程获评A),安全科学与工程、环境科学与工程、控制科学与工程、动力工程与工程热物理、机械工程、计算机科学与技术、土木工程、化学、外国语言文学、管理科学与工程、工商管理、马克思主义理论等一批学科具有雄厚实力,力学、物理学、数学、信息与通信工程、仪器科学与技术、纳米材料器件、光电信息材料与器件等基础学科与交叉学科焕发出勃勃生机。 启道考研复试班根据历年辅导经验,编辑整理以下关于考研复试相关内容,希望能对广大复试学子有所帮助,提前预祝大家复试金榜题名! 专业介绍 控制科学与工程是研究控制的理论、方法、技术及其工程应用的学科。控制科学以控制论、系统论、信息论为基础,研究各应用领域内的共性问题,即为了实现控制目标,应如何
材料成形自动控制理论基础总结版 1.自动控制是采用自动检测、信号调节、电动执行等自动化装置组成的闭环控制系统, 它使各种被控变量保持在所要求的给定值上。 2.过程自动化是指在生产过程中,由多个自动控制系统组合成的复杂过程控制系统。 3.生产过程实现自动化的目的是:保证生产过程安全稳定;维持工序质量,用有限资源制 造持久耐用的精美产品;在人力不能胜任的复杂快速工作场合中实现自动操作;把人从繁重枯燥的体力劳动中解放出来;不轻易受人的情绪和技术水平影响,按要求控制生产过程。 4.轧制生产过程的特点:(1)需要模型计算。(2)控制项目众多。(3)调节速度快。(4)参数之 间相互耦合影响。(5) 控制结果综合性强。 5.轧制过程技术现状:(1) 轧钢生产日益连续化。(2)轧制速度不断提高。(3)生产过程计算 机控制。(4) 产品质量和精度高标准交货。(5)操作者具有较高技术水平。 6.轧制自动化目前可以分为对过程的自动控制和对工艺过程的计算机系统控制两部分。 7.计算机控制内容又分为计算机配置方式、信息跟踪方式和动态在线控制算法以及分布 计算机通讯网络四大部分。 8.中国冶金自动化的发展:(1) 在基础控制方面,以PLC、DCS、工业控制计算机为代表的 计算机控制取代了常规模拟控制。(2)在控制算法上,重要回路控制一般采用PID算法。 (3)在电气传动方面,用于节能的交流变频技术普遍采用;国产大功率交直流传动装置在 轧线上得到成功应用。(4)在过程控制方面,计算机过程控制系统普及率有较大幅度提高。 9.自动控制是利用控制系统使被控对象或是生产过程自动按照预定的目标运转所进行的 控制活动。 10.开环控制系统:输出量不会返回影响过程的直接控制系统。 11.闭环控制系统:将输出量反馈回来影响输人量的控制系统,或称为反馈控制系统。 12.自动控制系统:如果将自动检测信号与设定值进行比较,得到与目标信号的偏差,再利 用运算控制器自动完成偏差信号调节和控制信号输出,最后由电动执行器完成调节任务,使偏差得到消除,就成为自动控制系统。 13.轧件厚度闭环自动控制系统:它是借助于测厚仪测出实际的轧出厚度,并转换成相应的 电压信号,然后将它与所要求的目标厚度相当的电压信号进行比较,得到与厚度偏差相当的偏差信号。偏差信号经放大器放大,控制可控桂导通角度,调节电动机通电时间,使压下螺丝向上或向下移动,从而使棍缝相应地改变。 14.复合控制系统:将开环和闭环系统合在一块进行控制的自动控制系统。 15.在机械运动系统中总是存在运动部件的惯性、与运动速度相关的摩擦阻力和工作负荷的 大小不同,因而在自动控制过程中,它们会不同程度地使得执行机构的动作不能及时地随着输人信号变化。 16.系统的暂态品质:调节过程的快慢,振荡次数,以及振荡时被控量与给定值之间的最 大误差。 17.控制系统静态是指被控制量不随时间变化的平衡状态,动态是指被控量随时间变化的不 平衡状态。 18.自动控制系统的性能质量要求:稳定性、准确性、快速性。
P317 8 计算氧气转炉钢熔池(受热炉衬为钢水量的10%)中,每氧化0.1%的[Si]使钢水升温的效果。若氧化后SiO 2与CaO 成渣生成2CaO ?SiO 2(渣量为钢水量的15%),需要加入多少石灰(石灰中有效灰占80%),才能保持碱度不变(0.81kg ),即2(CaO) 3(SiO ) w R w = =;增加的石灰 吸热多少?(答案:1092.2kJ)欲保持炉温不变,还须加入矿石多少kg? 已知:2229822;97.07kJ/mol r SiO CaO CaO SiO H +=??=- 钢的比定压热容p,0.84kJ /(K kg)st C =;炉渣和炉衬的比定压热容 p,, 1.23kJ /(K kg)sl fr C =;矿石的固态平均比热容 p,ore 1.046kJ /(K kg)C =;矿石熔化潜热 fus ore 209.20/H kJ kg ?=; 2r [Si]2[O](SiO ) ; H -600kJ/mol +=?≈ 221r [Si]O (SiO ) ;H = 28314kJ/kgSi , H 792.792kJ/mol +=?-?≈- 解: 221[Si]O (SiO ) ;H = 28314kJ/kgSi +=?- 硅氧化所产生的化学热不仅使钢水升温,而且也使炉渣、炉衬同时升温。忽略其他的热损失。设有钢水质量m st ,根据 p,p,p,()st st sl sl fr fr Q c m c m c m t =++? 11p,p,p,p,p,p,11 p,p,p,p,p,p,0.1%0.1%0.1% 10%15%(10%15%) 0.1%28314 = 0.84 1.2310%st st st sl sl fr fr st st sl sl fr fr st st st st sl st fr st st st sl fr m H Q t c m c m c m c m c m c m m H m H c m c m c m m c c c ????== ++++??????= = ?+??+???+?+??+?+- 1.2315% = 24.67 K ?-,升温 硅的氧化反应是放热反应,所以钢水升温约24.67K 。 方案一: 过剩碱度:氧化后SiO 2与CaO 成渣生成2CaO ?SiO 2,即渣中的(CaO )减少,碱度减小,减少的量是与氧化后SiO 2结合CaO 的量。所以需要增加石灰,使得碱度不变。 工程碱度:氧化后的SiO 2使得(SiO 2)增多,(CaO )不变,碱度减小,所以需要增加石灰。
2001年招收攻读硕士学位研究生入学考试试题 考试科目:冶金物理化学 一、简要回答下列问题(每题5分,共50分) 1、已知Mn=(Mn)%,写出Mn的标准溶解自由焓。 2、对SiO2—CaO系,写出其光学碱度的表达式。 3、应用∑%FeO表示炉渣的能力,为此常将Fe2O3量折合成FeO量,试写出 两种折算法的表达式。 4、简述铝使钢液镇静的热力学原理。 5、炉渣完全离子溶液模型在什么情况下需要引入萨马林(CaMapuH)修正 式,为什么? 6、简述铁液中元素选择性氧化的热力学原理。 7、未反应核模型处理气固相反应的三个主要环节? 8、简述表面更新理论模型中各项的物理意义。 9、简述准稳态原理及其意义。 10、应用热力学原理说明为什么碳氧反应在高温下生成CO,而在低温下生 成CO2? 二、(10分)为使温度为1600℃含碳量为0.0625%的钢液的溶解氧量下降到 0.0008%,需加入多少铝?如改用真空脱氧,需用多大的真空度? 已知:[C]+[O]=CO △Go=-22363-39.63T 2[Al]+3[O]=Al2O3 △Go=-1218799+394.13T f C f O=1 f Al2f O3=1 M C=12 M Al=27 三、(10分)试说明扩散脱氧的冶金热力学及动力学特征? 以下四、五题适合于统考生 四、(15分)把组成为20%FeO,10%MnO,10%MgO,40%CaO,20%SiO2的熔渣与含 氧0.1%的钢液接触,试问此渣能否使钢液中的氧量再增高?温度1600℃。 五、(15分)设铁水脱硫反应为4CaO(S)+[Si]+2[S]=2CaS(S)+2CaO·SiO2(S) △=-450980+149.23T(J) 已知在1500 ℃下,脱硫反应达到平衡时,铁水含碳量为3%,含硅为0.6%,=0.11,=0.06,=0.11,=0.17 1) 计算反应达到平衡时,铁水中的硫含量; 2) 写出铁水脱硫的速率式,并讨论其动力学过程。 以下四五题适合单考生 四(15分)在1540℃下,与含有2.10%C的铁液平衡的气相的 =2260。试求 五(15分)试用冶金物理化学的原理或方法讨论冶金生产中的一个环节。
P329 1 实验测得Fe-C 熔体中碳的活度C a (以纯石墨为标准态)与温度T 及浓度C x 的关系如下 C C C C C 11803400lg lg()0.87(0.72)()121x x a x T T x =+-++-- (1)求C lg γ与温度T 及浓度C x 的关系式; (2)求C lg γ 与温度T 的关系式及1600℃时的C γ ; (3)求反应C (石墨)=[C]1%的 sol G ? 与温度T 的二项式关系表达式; (4)当1600℃铁液含碳量为w[C]=0.24%时,碳的活度(以w[C]=1%溶液为标准态)是多少? 解: (1)以纯石墨为标准态C C C a x γ=?,则 C C C C C C C C C C C 11803400lg lg lg lg()lg 0.87(0.72)() 121111803400lg()0.87(0.72)() 121x x a x x x T T x x x T T x γ=-=-+-++--=+-++-- (2),C C H,C C H,C H,C ,,01,R C C i C i a x f x a f x γγγγ?= ==?≤≤?由 得出 该式在全浓度范围内成立,没有限制条件。 在极稀溶液C 0x →且满足Henry 定律,H,C 1f =,则C C γγ= , C C C C 00 C C 111803400lg lg lg()0.87(0.72)()1211180 0.87C x x x x T T x T γγ→→==+-++--=- 当T=1600℃=1873K 时,C C 1180lg 0.870.24,0.5751873 γγ=-=-=
北京科技大学参考书目│ ├────────────────────────────────────────┤ │070205凝聚态物理: 226量子力学:《量子力学》上册科学出版社曾谨言│ │《量子力学教程》高等教育出版社周世勋 │ │228统计物理:《热力学与统计物理》高等教育出版社汪志成 │ │《统计物理学》高等教育出版社熊吟涛 │ │332固体物理:《固体物理学》上、下册上海科技出版社方俊鑫、陆栋│ │《固体物理学》高等教育出版社黄昆、韩汝琦 │ │《固体物理导论》科学出版社基特尔(杨顺华译) │ │333金属物理:《金属物理》冶金工业出版社余宗森、田中卓 │ │同等学力加试:原子物理《原子物理学》高等教育出版社杨福家 │
│《原子物理学》高等教育出版社褚圣林 │ │理论力学《理论力学》高等教育出版社胡慧玲 │ │ │ │071200科学技术史: 219物理化学:《物理化学》冶金工业出版社蔡文娟1994 │ │254考古学通论:《中国考古学通论》河南大学出版社孙英民.李友谋主编2002年│ │《中国考古学:实践、理论、方法》中州古籍出版社张忠培1992年 │ │262科学技术哲学:《西方科学哲学》南京大学出版社夏基松、沈斐凤1987年│ │《科学哲学教程》山西科学出版社郭贵春2000年 │ │267文物保护学:《岩土文物建筑的保护》中国建筑工业出版社黄克忠1998年│ │《文物保存环境概论》科学出版社郭宏2001年9月 │ │《文物保护材料学》西北大学出版社王薏贞1995年 │
│334金属学及热处理:《金属学》冶金工业出版社宋维锡 │ │337金属腐蚀学:《金属腐蚀学》冶金工业出版社朱日彰 │ │395科学技术史:《科学史》广西师范大学丹皮尔2001 │ │《历史上的科学》科学出版社贝尔纳着伍况甫译1983 │ │《20世纪科学技术简史(第二版)》科学出版社李佩珊、许良英1999 │ │同等学力加试:科技文献导读无 │ │科学社会学《科学的社会功能》商务印书馆贝尔纳1982 │ │ │ │080104工程力学: 212弹性力学:《弹性力学》人民教育出版社徐 芝纶主编│ │213工程地质学:《工程地质学》地质出版社胡广韬.杨文元主编 │ │250炸药化学:《爆炸化学》国防工业出版社张熙和.云主惠主编 │
第一、二章 1.系统定义:由相互作用和相互依赖的若干组成部分结合成的具有特定功能的有机整体。(1) 包含若干部分(2) 各个部分之间存在某种联系(3) 具有特定的功能。 控制对象:泛指任何被控物体(不含控制器)。 控制:使某个控制对象中一个或多个输出量随着时间的推移按照某种预期的方式进行变化。 实现:靠控制系统去完成。 开环系统:不存在稳定性问题,控制精度无法保证。 闭环系统:可实现高精度控制,但稳定性是系统设计的一个主要问题。 2.实现闭环控制的三个步骤一是对被控量(即实际轧出厚度或压下位置)的正确测量与及时报告;二是将实际测量的被控量与希望保持的给定值进行比较、PID计算和控制方向的判断;三是根据比较计算的结果,发出执行控制的命令,使被控量恢复到所希望保持的数值上。 闭环控制系统的基本组成和要求 (1)被控对象(2)被控量(3)干扰量(或叫扰动量)(4)自动检测装置(或叫自动检测环节) (5)给定量(或叫给定值)(6)比较环节(7)调节器(8)执行控制器 古典控制策略主要包括:PID控制、Smith控制和解耦控制。 古典控制策略的应用要满足下面几个条件:(1) 系统应为线性定常系统;(2)系统的数学模型应比较精确;(3) 系统的运行环境应比较稳定。 PID算法的特点 PID算法综合了系统动态过程中的过去、现在以及将来的信息 PID算法适应性好,有较强的鲁棒性 PID算法有一套完整的参数设计与整定方法 PID控制能获得较高的性价比 对PID算法的缺陷进行了许多改良 形成具有实用价值的复合控制策略 PID控制的显著缺点是不适于 具有大时滞的被控系统( G(s)e- s ) 变参数及变结构的被控系统 系统复杂、环境复杂、控制性能要求高的场合 3.PID控制完全依靠偏差信号调节会带来很大调节延迟。对偏差信号进行比例、积分和微分调节运算称为PID控制,它可以提高控制品质。这是将偏差放大或通过微分给与短时间的强烈输出,加快启动,减少死区。积分是将偏差累积起来,进行调整,达到消除静差的目的。减少比例放大或增加对象变动的阻尼可以减少震荡幅度,但也降低系统响应频率。 自适应控制 基本思想:在控制系统的闭环回路之外建立一个由参考模型和自适应机构组成的附加调节回路。系统用参考模型的输出代表系统的理想输出,当系统运行过程中发生参数或特性的变化时,输出与期望输出之间的误差进入自适应机构,由自适应机构进行运算后,制订出改变控制器参数的策略,或对控制对象产生等效的附加控制,使输出与期望输出趋于一致。 变结构控制 变结构控制策略与其它控制策略的根本区别在于:控制器的结构是不固定的,可根据控制对象所处的状态改变。 神经网络控制的特点 (1)具有对大量信息的分布存贮能力和并行处理能力; (2)具有对多种形式信息(如图像、语音、数字等)的处理和利用能力; (3)具有很强的处理非线性问题的能力; (4)具有对不确定问题的自适应和自学习能力。 神经网络控制应用方式基本分为两类:单神经元和神经网络。 4.自动控制自动控制是采用自动检测、信号调节(包括数字调节器、计算机)、电动执行等自动化装置,组成的闭环控制系统,它使各种被控变量(如流量、温度、张力、轧机辊缝和轧机转速等)保持在所要求的给定值上。过程自动化是指在生产过程中,由多个自动控制系统组合的复杂过程控制系统。 5.自动控制目的生产过程实现自动化的目的是:提高工序质量,用有限资源,制造持久耐用的精美产品;在人力不能胜任的复杂快速工作场合中实现自动操作;把人从繁重枯燥的体力劳动中解放出来;不轻易受人的情绪和技术水平的影响,稳定工序质量。实现自动
2001北京科技大学攻读硕士研究生入学考试试题 考试科目:金属学A 适用专业:科学技术史,冶金物理化学,钢铁冶金,有色金属,材料加工工程。 说明:1.试题必须写在答题纸上。 2.统考生做1--10题;单考生做1--7题和11--13题。 1.名词解释:(每小题2分,共10分) (1)单胞和复合单胞(2)金属键(3)代位固溶体(4)位错(5)偏聚和有序化 2.判断对错:(10分) 3.以液态无限互溶、固态有限溶解并具有共晶反应的二元相图为例说明二元相图是制作方法和二元相图的一般几何规律。(10分) 4.结晶后的组织中产生显微偏析的原因是什么?采用什么措施能减少和消除偏析。(10分) 5.什么是晶界?讨论晶界在多晶体形变过程中的作用。(10分) 6.什么是相界面?复合合金形变的特点是什么?(10分) 7.说明使多晶体晶粒细化能使材料的强度提高、韧性增加的原因。(10分) 8.简要叙述马氏体转变的一般特点。(10分) 9.要想获得粗大的再结晶晶粒可采取什么措施,说明原因。(10分) 10.简述固态相变在相变阻力、新相形核、新相成长方面的特点。(10分) 11.什么叫再结晶?什么是再结晶温度?简要描述再结晶过程。(10分) 2002北京科技大学攻读硕士研究生入学考试试题 考试科目:金属学A 适用专业:科学技术史,冶金物理化学,钢铁冶金,有色金属,材料加工工程。 说明:1.试题必须写在答题纸上。 2.统考生做1--9题;单考生做1--6题和10--12题。 一.名词解释(20分,每个2.5分) (1)点阵畸变(2)柏氏矢量(3)相图(4)过冷度 (5)形变织构(6)二次再结晶(7)滑移系(8)孪生 二.画出立方晶系中(111)面、(435)面。写出立方晶系空间点阵特征。(10分) 三.铸锭的一般组织可分为哪几个区域?写出其名称。并简述影响铸锭结晶组织的因素。(10分) 四.画图并简述形变过程中位错增殖的机制。(10分) 五.写出菲克第一定律的数学表达式,并说明其意义。简述影响扩散的因素。(10分) 六.简述形变金属在退火过程中显微组织、存储能及其力学性能和物理性能的变化。(10分) 七.简述固态相变与液态相变的相同点与不同点。(10分) 八.画出铁碳相图,标明相图中各特征点的温度与成分,写出相图中包晶反应、共晶反应与共析反应的表达式。(10分) 九.分析再过程中行核和张大与凝固过程中的行核和张大有何不同点。(10分) 十.分析含碳量0.12%的铁碳合金的结晶过程。(10分)(单考生做) 十一.简述铸锭的宏观偏析。(10分)(单考生做) 十二.简述金属晶体中缺陷的类型。(10分)(单考生做) 2003北京科技大学攻读硕士研究生入学考试试题 考试科目:金属学A 适用专业:科学技术史,冶金物理化学,钢铁冶金,有色金属,材料加工工程。 说明:带三角板等,统考生做1--11题;单考生做1--7题和12--15题。 1.名词解释: (1)刃型位错和螺型位错模型(2)晶界与界面能 (3)同分凝固与异分凝固(4)形变织构
题目:天线接收卫星信号的PID研究 摘要PID控制器是目前工业过程控制中,应用最广泛的工业控制器之一。本篇文章以大型天线接收卫星信号,跟踪卫星运动系统为基础构造数学模型,设计PID控制器进行控制并进行MA TLAB仿真。 ABSTRACT PID controller is the industrial process control, one of the most widely used industrial controller. This article to the large antenna for receiving satellite signal, tracking satellite motion system based on structure mathematical model, design of PID controller and MA TLAB simulation 关键词关键词一:卫星信号; 关键词二:准确定向; 关键词三:PID控制器; 关键词四:matlab仿真; 关键词五 引言: 当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e (t)与输出u (t)的关系为:u(t)=kp[e(t)+1/TI∫e(t)dt+TD*de(t)/dt] 式中积分的上下限分别是0和t,因此它的传递函数为:G(s)=U(s)/E(s)=kp[1+1/(TI*s)+TD*s],其中kp为比例系数;TI为积分时间常数;TD为微分时间常数 INTRODUCTION: The automatic control technology is based on the notion of feedback. Feedback theory consists of three parts: measurement, comparison and implementation. Measurement of variables of interest, and expected value are compared, with the error correction control system response. PID controller by proportional unit (P ), integral unit ( I ) and differential unit ( D ). The input and output e ( T ) U ( T ) relationship is: u (T) =kp[e ( T ) +1/TI∫ e ( T ) dt+TD*de ( T ) /dt] type integral limits were 0 and T, so its transfer function : G ( s ) =U ( /E ( s ) s ) =kp[1+1/ ( TI*s ) +TD*s], where KP is proportional coefficient; TI integral time constant; TD differential time constant 大型天线可以接收卫星信号,为了能跟踪卫星的运动,必须保证天线的准确定向。天线指向控制系统采用电枢控制的电机驱动天线,讨论PID控制器的设计,以达到对系统的更高的品质要求。 R(s)
《最优化与最优控制》教学大纲 课程编号:4050141 开课院系:自动化学院控制科学与工程系课程类别:专业选修 适用专业:自动化 课内总学时:32 学分:2 实验学时:0 设计学时:0 上机学时:0 先修课程:数学分析、线性代数、常微分方程、自动控制原理 执笔:邵立珍 审阅:董洁 一、课程教学目的 最优化与最优控制在工程技术,经济,管理等领域有广泛的应用。通过本课程的学习,使学生学会最优化的基本理论和算法,学会最优控制基本概念和理论。 二、课程教学基本要求 1.课程重点: 要求学生掌握典型的最优化算法,了解最优化的基本理论,掌握最优控制基本概念,掌握极大值原理,动态规划法了解典型最优控制问题。 2.课程难点: 极大值原理,动态规划法。 3.能力培养要求: 能够解决一些典型的最优控制问题,首先能够将实际问题,描述为最优控制问题,然后根据问题的条件,选择合适的求解工具并得到正确的答案。 三、课程教学内容与学时 课堂教学(32学时) 1.最优化概论(2学时) 最优化问题的数学模型 最优化方法及其结构 线性搜索 2.无约束最优化方法(4学时) 局部极小的条件 牛顿法 拟牛顿法 共轭梯度法 方向集法 3.约束优化的理论与方法(8学时) 约束问题和Lagrange乘子法 一阶最优条件 二阶最优条件 罚函数与障碍函数 乘子法 4.二次规划(6学时) 等式约束法 Lagrange方法 有效集法 5.最优控制概论(2学时) 经典控制与现代控制理论简介 最优控制问题的产生 最优控制问题的一般提法 最优控制问题分类 6.变分法与最优控制(4学时) 变分法 用变分法解最优控制 7.极大值原理(4学时) 末端自由的极大值原理 末端受约束的极大值原理 时变系统,复合型性能指标问题 8.动态规划法(2学时) 多步决策与动态规划 离散系统动态规划法 连续系统动态规划法 实验(上机、设计)教学(0学时) 四、教材与参考书 教材 1. 王晓陵,陆军编,《最优化方法与最优控制》,哈尔滨工程大学出版社,2008年,第1版 参考书 1. 吴受章编,《最优控制理论与应用》,机械工业出版社,2008年,第1版 2.李国勇编,《最优控制理论与应用》,国防工业出版社,2008年,第1版 3. 赫孝良等编,《最优化与最优控制》,西安交通大学出版社,1992年,第1版
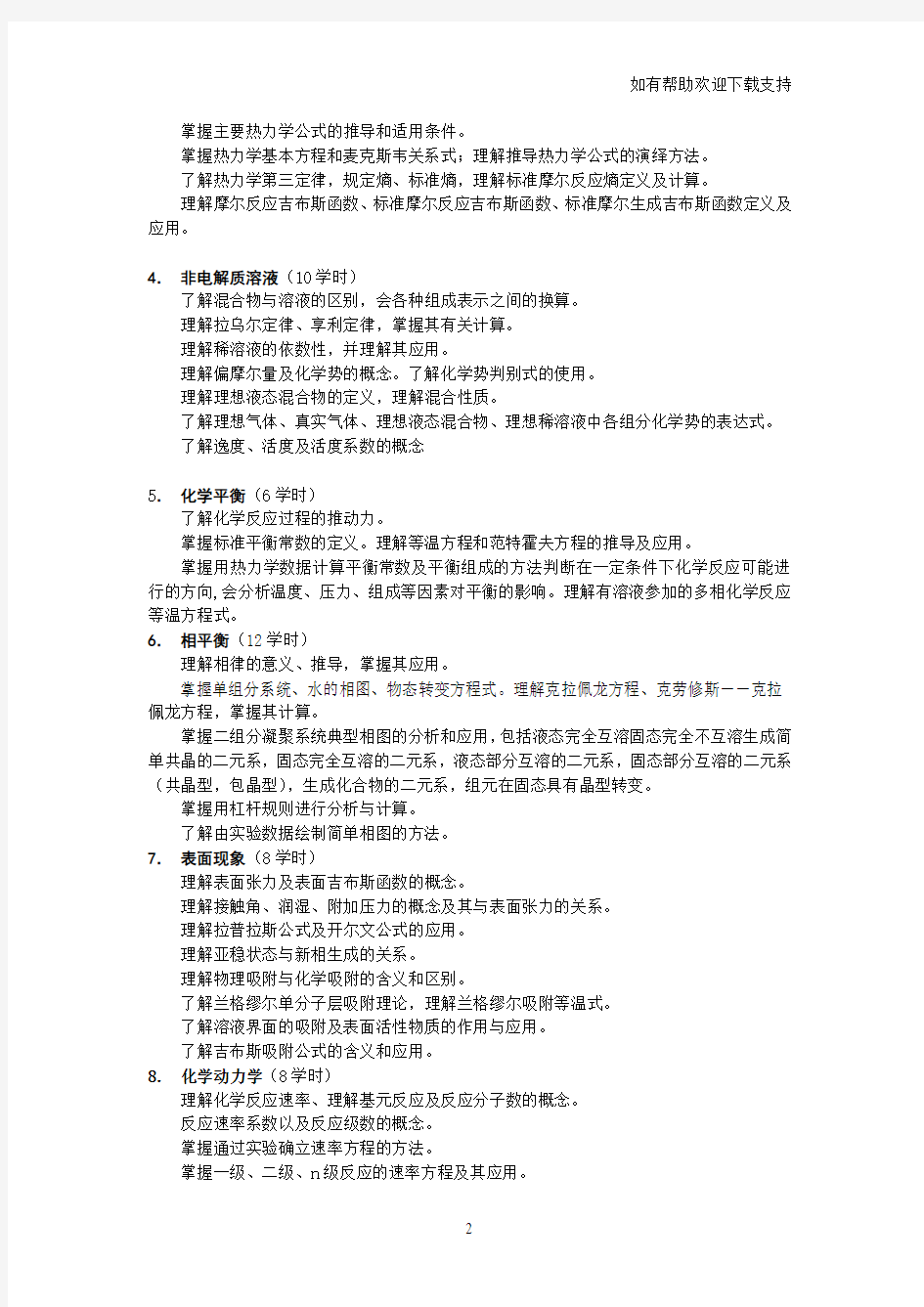
P344 3 (1)把含w(Ni)=30%的熔体从1600K开始冷却,试问在什么温度开始有固体析出,其组成如何?最后一滴熔体凝结时的温度和组成各为多少? (2)将含w(Ni)=50% 的合金0.24kg冷却到1550K,Ni在熔体和固体中的含量各为多少?
此为固态完全互熔系统。设开始结晶温度为IT ,终了结晶温度为FT 。 (1) IT = -0.0214x 2 + 5.8041x + 1356.5,w(Ni)=30%,即 x=30, 开始有固体析出的温度IT=1511.37K FT = 0.0142x 2 + 2.2716x + 1355, FT=1511.37, x=53,即w(Ni)=53% 开始有固体析出时组成:固体相含53%(w/w) Ni ;液态熔体含30%(w/w) Ni FT = 0.0142x 2 + 2.2716x + 1355, x=30, FT=1435.93K IT = -0.0214x 2 + 5.8041x + 1356.5, IT=1435.93K, x=14 最后一滴熔体凝结时温度T=1435.93K 最后一滴熔体凝结时组成: 固体含30%(w/w) Ni ; 液态熔体含14%(w/w) Ni; (2) IT = -0.0214x 2 + 5.8041x + 1356.5, IT=1550K, x=38.9,w(Ni)=38.9%。 FT = 0.0142x 2 + 2.2716x + 1355, FT=1550,x=61.6,w(Ni)=61.6%。 (50-38.9)W L =(61.6-50)W S , 又W L +W S =0.24kg 联立以上两式子,解方程得:W S =0.118kg , W L =0.123kg 固体含Ni=0.118*61.6%=0.073kg 熔体含 Ni=0.123*38.9%=0.047kg Cu-Ni Phase diagram 02004006008001000120014001600180020000 20 40 60 80 100 x=Ni%(w/w) T /K
北京科技大学自动控制原理课程设计 学院: 班级: 学号: 指导教师: 姓名:
目录 一.引言 (3) 二.系统模型的建立 (3) 三.系统控制的优化 (7) 3.1 PID调节参数的优化 (7) 3.2 积分分离PID的应用 (10) 四,结语 (12)
双轮自平衡智能车行走伺服控制算法摘要:全国第八届“飞思卡尔”智能汽车大赛已经结束。光电组使用大赛提供的D车模,双轮站立前进,相对于以前的四轮车,双轮车的控制复杂度大大增加。行走过程中会遇到各种干扰,经过多次的实验,已经找到了一套能够控制双轮车的方法。双轮机器人已经广泛用于城市作战,排爆,反恐,消防以及空间消防等领域。实验使用单片机控制双电机的转速,达到了预期的效果。 关键词:自平衡;智能;控制算法 Motion Servo Control Algorithm for Dual Wheel Intelligent Car Abstract: The 8th freescale cup national Intelligent Car competition of has been end.The led team must used D car which has only 2tires.It is more difficult to control prefer to control A car which has 4tires.There is much interference on the track.A two-wheeled robots have been widely used in urban warfare, eod, counter-terrorism, fire control and space fire control and other fields。We has searched a good ways to control it.We used MCU to control the speed of motors and get our gates. Key Words: balance by self; intelligent; control algorithm 一.引言 双轮自平衡车是智能汽车中一个重要的组成部分。由于其是两轮站立,在很多场合有比四轮车更灵活,更方便控制的特点。基于双轮车的机器人已经用于在城市作战,排爆,反恐,消防,空间探测等领域。 双轮自平衡车的控制过程与倒立摆相似。本次研究主要是对双轮车直立的研究。由于车在前进过程中还可能遇到弯道和路障,所以本文还对整个系统的稳定性做了比较深入的研究。在理论证明正确的前提下,再次进行仿真验证,仿真验证的结果与实验结果相符合。二.系统模型的建立 智能汽车竞赛使用的是D车模。D 车模是双电机,双轮的车模。单电机控制双轮时可以满足车身保持平衡和前进的要求,而之所以使用双电机是为了前进过程中转弯的需要。本文只讨论跟直立和干扰有关的内容,鉴于此,本文余下内容默认是单电机控制的车模。自平衡车在没有电机控制的情况下属于不稳定系统,在极小的干扰下,就会偏离平衡位置而失去平衡。因此,控制系统必须使用反馈控制。图1是站立在赛道上的双轮车模。
材料成形自动控制基础作业 一、回归方程系数a, b 1.Matlab程序: clc disp('函数为y=ax^b'); disp('取对数lny=lna+blnx') x=[0.1 1 1.9 2.8 3.7 4.6 6.4 7.3 8.2 9.1 10 10.9 11.8 12.7 13.6 14.5 15.4 16.3 17.2] y=[0.001514 2.4 18.71642 64.73169 157.9271 316.9832 912.9 1390.455 2015.652 2812.831 3804.4 5012.6 6460.07 8173.031 10175.03 12490.76 15145.29 18164 21573.9] c=log(x); d=log(y); sumc=sum(c); sumd=sum(d); n=length(c); e=c.*d; sume=sum(e); f=c.*c; sumf=sum(f); a1=(sume-sumc*sumd/n)/(sumf-(sumc)*(sumc)/n); c0=(sumc)/n; d0=(sumd)/n; b=a1; a0=d0-a1*c0; a=exp(a0); x1=0.01:0.1:21; y1=a.*x1.^b; plot(x,y,'bp',x1,y1,'g-') legend('数据点','y=ax^b拟合曲线') disp('拟合得到的a和b的值为:') a b 2.拟合结果 拟合得到的a和b的值为: a = 2.4001 b =3.2000
二、计算轧制压力 1.Matlab程序 clc C=[0.0416 0.0441 0.0367 0.0367 0.033 0.029 0.029 0.033 0.029 0.0017 0.0013 0.0019 0.0019 0.0019] Mn=[0.25 0.23 0.26 0.26 0.26 0.25 0.25 0.26 0.25 0.15 0.14 0.14 0.14 0.14] Cr=[0.03 0.03 0.02 0.02 0.04 0.04 0.04 0.04 0.04 0.02 0.02 0.02 0.02 0.02] V=[0.02 0.03 0.02 0.02 0.02 0.01 0.01 0.02 0.01 0.02 0.02 0.03 0.03 0.03] T=[948.4 950.18 944.26 958.31 954.99 947.67 954.43 960.78 950.46 967.32 960.46 967.41 954.13 956.74] S=[1.39 1.38 1.33 1.264 1.372 1.371 1.372 1.313 1.358 1.452 1.538 1.469 1.474 1.52] r=[0.4183 0.4296 0.428 0.4248 0.4072 0.4115 0.4114 0.4085 0.4123 0.393 0.3639 0.3947 0.3955 0.3974] H=[43.303 46.65 46.361 45.924 45.908 45.943 46.113 46.045 46.115