人机功效评价解决方案
Jack 人体仿真及建模系统
Jack是一个人体建模与仿真软件解决方案,帮助各行业的组织提高产品设计的工效学因素和改进车间的任务。jack最初是由宾夕法尼亚大学的人类模型和模拟中心(Center for Human
Modeling and Simulation at the University of
Pennsylvania)开发,目前是西门子PLM旗下的一员。使
用Jack可以:
1、建立一个虚拟的环境
2、创建一个虚拟人
3、定义人体大小和形状
4、把人放在环境中
5、给人指派任务
6、分析人体如何执行任务
从jack获得的信息可以帮助您设计更安全、更符合人体工程学的产品、工作场所和更快的流程和使用更低的成本。
第1步:建立一个虚拟的环境
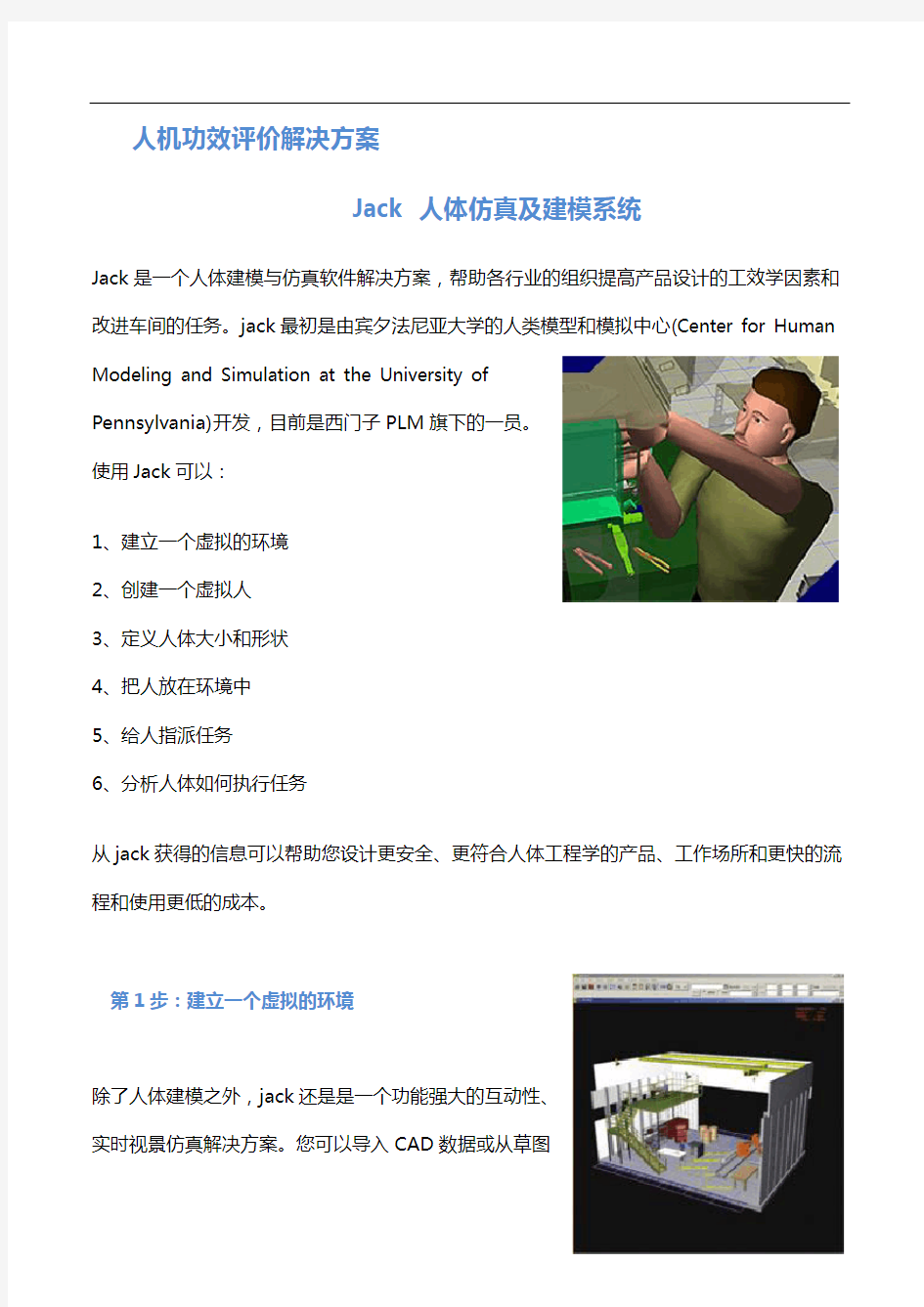
除了人体建模之外,jack还是是一个功能强大的互动性、
实时视景仿真解决方案。您可以导入CAD数据或从草图
开始建立模型,在周围的环境中移动物体,交互式地改变相机的视图和创建特殊效果,以提高您“现场”的真实性。
导入CAD模型-jack可以导入基于VRML,IGES,立体(STL)的和inventor (iv)文件格式的3D 图形数据。此外,软件提供了减小CAD数据的功能来优化模型,用于实时仿真。OpenGL Optimizer的使用可以在不损害视频保真度的情况下相当程度的减少模型的棱角。
在jack中创建几何图形-jack允许您从草图开始建立模型,用于概念设计。您可以创建简单的几何图形,如立方体、球、圆柱、圆锥和圆环。熟练操作后,您可以合并这些简单的图形成为更加复杂的部件,如机械工具和车辆。jack还提供了一套基本的工具(锤子,钳子,梯子,棘轮,锯,螺丝刀和扳手)。
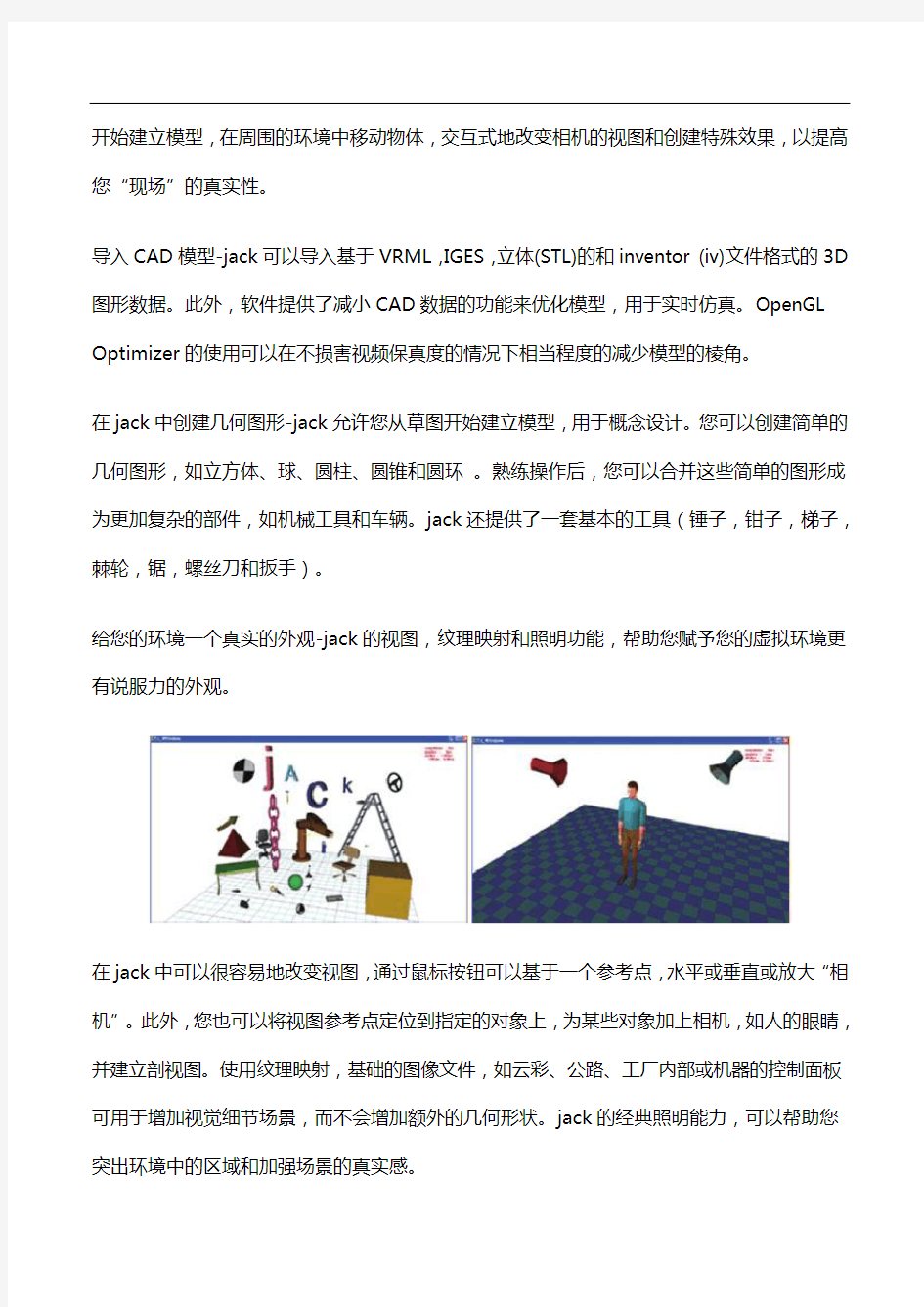
给您的环境一个真实的外观-jack的视图,纹理映射和照明功能,帮助您赋予您的虚拟环境更有说服力的外观。
在jack中可以很容易地改变视图,通过鼠标按钮可以基于一个参考点,水平或垂直或放大“相机”。此外,您也可以将视图参考点定位到指定的对象上,为某些对象加上相机,如人的眼睛,并建立剖视图。使用纹理映射,基础的图像文件,如云彩、公路、工厂内部或机器的控制面板可用于增加视觉细节场景,而不会增加额外的几何形状。jack的经典照明能力,可以帮助您突出环境中的区域和加强场景的真实感。
第2步:创建一个虚拟的人体
jack提供业界最准确的人体生物力学模型。基于1988年美国军方
人体调查(ANSUR 88)的三维人体测量技术,jack的人体模型:
1、有69个部分,68节,17段脊柱,16段的手,加上肩/锁骨关节和135度的自由度。
2、遵照来自NASA研究的共同限制(人体测量资料书,第二卷。人体测量数据手册,NASA RP-1024 技术报告)
3、可描绘成数字、线框、阴影、高解析度或透明模式。
选择不同类型的人-jack可以让您建立不同类型的人。您可以从菜单
中选择下列预定义的人物:
1、大、中、小的人体-基于SAE的建议的人的物理尺寸(SAE J833);
2、矮小和高大的男人和女人-基于ANSUR 88 的人体极限数字;
3、大、中、小的日本人-基于已承认的日本人体型数据;
4、高清晰度的男人和女人-代表第50百分位的男性和女性,基于ANSUR 88。
第3步:定义人体大小和形状
人体模拟软件,为了可靠地确定某个设计是否可以适应不同的人体尺寸,它必须采用正确的方法来构建人体范围。jack使用三种方法来构建人体范围。您可以:
1、从一套包含77个人体的人体类型中选择,它们代表了一系列大小不
同的11个人体测量数据,这是基于ANSUR 88数据库的;
2、通过给出一个指定的宽放来构造人体,如肩宽度,坐高,等等;然后
由一种算法自动给出其余的尺寸;
3、给出身高和重量;其余尺寸由基于ANSUR 88数据库的统计模型自动生成。
第4步:把人体放置于环境中
jack允许让你操纵人体的个别部分与遵照基于NASA研究的角度限制的关节连接。当您在一个jack虚拟人体中移动身体的一部分的时候,软件使用实时逆运动学确定关联部分和关节的位置。例如,当您移动一个人体的手,上下臂部分及相关关节就会像真实的人体一样移动。设置您的虚拟人体的姿态-jack允许你通过直接操纵关节或从一个包含30个预定义态势的库中选择来描述你虚拟人体的姿态。您可以操纵虚拟人体,通过移动虚拟人的头部、眼睛、肩膀、躯干、质心、骨盆、四肢、脚或其整个身体。
指定jack的行为参数-jack允许您指定虚拟人是如何动作的,当其运动被控制的时候,不是直接的操作,而是由外部力量驱动。jack人体会将根据您定义的参数自动移动。例如,如果jack 正在将一个物体举过头顶,你把物体放在地面上,“行为控制”决定jack是否会弯腰、前行一步以保持其平衡,使他的眼睛注视对象等。jack允许您定义:
1、使工厂尽早上线
2、优化手工流程
3、改善工人的安全
4、较低的工人赔偿费用
5、减少停机时间和再培训的费用
在产品生命周期的制造阶段,人体仿真
允许您回答这些问题:
1、头部和眼睛是否跟踪一个物体
2、头部和眼睛是否保持自己的位置
3、躯干位置如何,以及如何弯曲(从腰部,从颈部,或使用特定的椎骨)
4、这个人体如何保持其平衡,以及是否前行一步以重新平衡
5、骨盆的方向如何
6、四肢的位置如何
7、膝盖的位置如何
8、脚的位置如何
定义jack与环境的关系-jack的约束系统使您可以指定您的虚拟人体与虚拟环境互动。jack允许您以各种不同的方式定义人体和物体之间的约束。例如,您可以创建约束来保持jack的背部靠到汽车座椅,他的右脚踩着油门。当座位移动,jack将遵循这些约束,其他关节也会相应移动。
为了确定虚拟人体是如何抓住物体的,jack提供五个预定义的类型。您指定了抓握类型,软件就会计算在实际围绕一个特定物体的时候手是如何闭合的。
第5步:给人体指派任务
对于某些类型的工效学或人体工程学的研究,用户只需在一个静态的姿势评价人体。(当达到某个控制的时候他看到了什么?不同大小的人体是否具有相同的视野?)其他研究需要人体运动。(人体遇到障碍物是否会移走或取代其中一部分?)jack使您能够通过其内置运动系统及其虚拟现实工具界面定义人体的运动。
直接的移动人体-jack提供了一个内置运动系统来定义必须在时间限制下执行的任务。jack模拟包括几个不同的动作,许多动作是同时发生的,并且指定了间隔时间。您可以在jack中创建交互式的动作来控制头部、眼睛、躯干、骨盆、质心、手臂、手、脚的运动。此外,您也可以使物体和相机移动。
当您创建一个仿真后,您可以将它保存和回放它,更换不同大小的虚拟人体来执行同样的任务。
另外,您也可以在环境中调整各种物体的的
大小或位置,并重新运行模拟来研究空间关
系,时间和空隙的改变情况。
利用虚拟现实工具,确定人体运动-jack允许
您使用各种各样的虚拟现实工具来创建真
实的动作或体验模拟。该软件支持:
1、Ascension Technology's Flock of Birds
2、Virtual Technology's Cyberglove and Cybergrasp
3、Virtual Research Systems' Head Mounted Display
4、Stereographic's Crystaleyes
5、NuVision Shutter Panels
步骤6 :分析虚拟人体如何执行任务
jack提供了一些基本的工具,以帮助您评估虚拟人体的动作。
更先进的人机工程分析工具,是Task Analysis和Occupant
Packaging Toolkits.
看看jack可以得到的-jack提供了多种功能的评价工具。您可
以:
1、创建从jack人体模型出发的eye Windows
2、创建视野来说明在第三者看来jack人体能看到的
3、测量jack人体的眼睛和任何物体之间的距离
4、控制jack人体的头/眼跟踪一个物体的运动
评价jack人体可以够到的距离-jack的延伸分析能力使您能够:
1、确定是否有人体可以够到目标对象
2、测量jack人体的眼睛和任何物体之间的距离
3、建立延伸边界,以图形显示,定义人体可以达到的范围
4、导出延伸边界到您的CAD系统,作为设计的范围
测试适合度和容纳度-jack帮助您确定是否您的设计考虑了各种规模的人体。您可以:
1、放置一个虚拟人体,然后利用这种姿势,测试各种不同规模的人体;
2、当其相对位置变化时,交互式测量环境中任何两点之间的距离,这有助于量化您的设计适合您的目标人群的程度。
3、物体移动时,突出人体和物体碰撞的实时数据。
计算人体的受力和力矩-jack使您可以计算出在一个特定的姿势下一个人的关节和体节的受力情况。因此,您可以比较用来完成各项任务的力量。软件还可以让您加上虚拟人体持有物体的重量这个因子,代表更多的外部力量,如G力。
利用动画和图像观察结果-jack产生动画和静止帧图像的功能可以帮助您找出统计报告不能给出的结果。您可以在任何场景中创建反锯齿的.rgb图像。您还可以轻松地将您的模拟导出AVI 或Quicktime电影。
各大仿真软件介绍(包括算法,原理) 随着无线和有线设计向更高频率的发展和电路复杂性的增加,对于高频电磁场的仿真,由于忽略了高阶传播模式而引起仿真的误差。另外,传统模式等效电路分析方法的限制,与频率相关电容、电感元件等效模型而引起的误差。例如,在分析微带线时,许多易于出错的无源模式是由于微带线或带状线的交叉、阶梯、弯曲、开路、缝隙等等,在这种情况下是多模传输。为此,通常采用全波电磁仿真技术去分析电路结构,通过电路仿真得到准确的非连续模式S参数。这些EDA仿真软件与电磁场的数值解法密切相关的,不同的仿真软件是根据不同的数值分析方法来进行仿真的。通常,数值解法分为显示和隐示算法,隐示算法(包括所有的频域方法)随着问题的增加,表现出强烈的非线性。显示算法(例如FDTD、FIT方法在处理问题时表现出合理的存储容量和时间。本文根据电磁仿真工具所采用的数值解法进行分类,对常用的微波EDA仿真软件进行论述。2.基于矩量法仿真的微波EDA仿真软件基于矩量法仿真的EDA 软件主要包括A D S(Advanced Design System)、Sonnet电磁仿真软件、IE3D和Microwave office。 2.1ADS仿真软件Agilent ADS(Advanced Design System)软件是在HP EESOF系列EDA软件基础上发展完善起来的大型综合设计软件,是美国安捷伦公司开发的大型综合设计软件,是为系统和电路工程师提供的可开发各种形式的射频设计,对于通信和航天/防御的应用,从最简单到最复杂,从离散射频/微波模块到集成MMIC。从电路元件的仿真,模式识别的提取,新的仿真技术提供了高性能的仿真特性。该软件可以在微机上运行,其前身是工作站运行的版本MDS(Microwave Design System)。该软件还提供了一种新的滤波器的设计引导,可以使用智能化的设计规范的用户界面来分析和综合射频/微波回路集总元滤波器,并可提供对平面电路进行场分析和优化功能。它允许工程师定义频率范围,材料特性,参数的数量和根据用户的需要自动产生关键的无源器件模式。该软件范围涵盖了小至元器件,大到系统级的设计和分析。尤其是其强大的仿真设计手段可在时域或频域内实现对数字或模拟、线性或非线性电路的综合仿真分析与优化,并可对设计结果进行成品率分析与优化,从而大大提高了复杂电路的设计效率,使之成为设计人员的有效工具[6-7]。2.2Sonnet仿真软件Sonnet是一种基于矩量法的电磁仿真软件,提供面
系统建模与仿真习题二 1. 考虑如图所示的典型反馈控制系统框图 (1)假设各个子传递函数模型为 66.031.05 .02)(232++-+=s s s s s G ,s s s G c 610)(+=,2 1)(+=s s H 分别用feedback ()函数以及G*Gc/(1+G*Gc*H)(要最小实现)方法求该系统的传递函数模型。 (2) 假设系统的受控对象模型为s e s s s G 23 )1(12 )(-+=,控制器模型为 s s s G c 32)(+=,并假设系统是单位负反馈,分别用feedback ()函数以及G*Gc/(1+G*Gc*H)(要最小实现)方法能求出该系统的传递函数模型?如果不能,请近似该模型。 2. 假定系统为: )(0001)(111000100001024269)(t u t x t x ????? ???????+????????????----= [])(2110)(t x t y = 请检查该系统是否为最小实现,如果不是最小实现,请从传递函数的角度解释该模型为何不是最小实现,并求其最小实现。 3. 双输入双输出系统的状态方程:
)(20201000)()(20224264)(75.025.075.125 .1125.15.025.025.025.125.425.25.025.1525.2)(t x t y t u t x t x ??????=????? ???????+????????????------------= (1)试将该模型输入到MATLAB 空间,并求出该模型相应的传递函数矩阵。 (2)将该状态空间模型转化为零极点增益模型,确定该系统是否为最小实现模型。如果不是,请将该模型的传递函数实现最小实现。 (3)若选择采样周期为s T 1.0=,求出离散后的状态方程模型和传递函数模型。 (4)对离散的状态空间模型进行连续变化,测试一下能否变回到原来的系统。 4. 假设系统的传递函数模型为: 222 )(2+++=s s s s G 系统状态的初始值为?? ????-21,假设系统的输入为t e t u 2)(-=。 (1)将该传递函数模型转化为状态空间模型。 (2)利用公式 ?--+=t t t A t t A d Bu e t x e t x 0 0)()()()(0)(τττ求解],0[t 的状态以及系统输出的解析解。 (3)根据上述的解析解作出s ]10,0[时间区间的状态以及系统输出曲线。 (4)采用lsim 函数方法直接作出s ]10,0[时间区间的状态以及系统输出曲线,并与(3)的结果作比较。 5. 已知矩阵 ???? ??????----=212332110A (1)取1:1.0:0=t ,利用expm(At)函数绘制求A 的状态转移矩阵,看运行的速度如何? (2)采用以下程序绘制A 的状态转移矩阵的曲线,看运行的速度如何? clc;clear; A=[0 1 -1;-2 -3 3;2 1 -2]; t=0:0.1:2; Nt=length(t);
1 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真): 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人,可以被用于研究和教学,除此之外,USARSim是RoboCup救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎ODE(Open Dynamics Engine),支持三维的渲染和物理模拟,较高可配置性和可扩展性,与Player兼容,采用分层控制系统,开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用UDP协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费GPL条款,多平台支持可以安装并运行在Linux、Windows和MacOS操作系统上。 1.2 Simbad Simbad是基于Java3D的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器,可定制环境和自定义配置传感器模块等功能,采用3D虚拟传感技术,支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于GNU协议,不支持物理计算,可以运行在任何支持包含Java3D库的Java客户端系统上。 1.3 Webots Webots是一个具备建模、编程和仿真移动机器人开发平台,主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人,可以自定义环境大小,环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用ODE检测物体碰撞和模拟刚性结构的动力学特性,可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可供选择的仿真传感器和驱动器,机器人的控制器可以通过内部集成化开发环境或者第三方开发环境进行编程,控制器程序可以用C,C++等编写,机器人每个行为都可以在真实世界中测试。支持大量机器人模型如khepera、pioneer2、aibo等,也可以导入自己定义的机器人。全球有超过750个高校和研究中心使用该仿真软件,但需要付费,支持各主流操作系统包括Linux, Windows和MacOS。 1.4 MRDS-Microsoft Robotics Developer Studio MRDS是微软开发的一款基于Windows环境、网络化、基于服务框架结构的机器人控制仿真平台,使用PhysX物理引擎,是目前保真度最高的仿真引擎之一,主要针对学术、爱好者和商业开发,支持大量的机器人软硬件。MRDS是基于实时并发协调同步CCR(Concurrency and Coordination Runtime)和分布式软件服务DSS(Decentralized Software Services),进行异步并行任务管理并允许多种服务协调管理获得复杂的行为,提供可视化编程语言(VPL)和可视化仿真环境(VSE)。支持主流的商业机器人,主要编程语言为C#,非商业应用免费,但只支持在Windows操作系统下进行开发。 1.5 PSG-Player/Stage/Gazebo
1.信息时代认识世界(科学研究)的三种方法是:理论研究、(_实验研究_)、(__ 仿真___)。 2.根据系统状态随时间变化是连续性还是间断性的,可将系统划分为(_连续系统_)、 (__离散系统__)。 3.系统仿真中的三个基本概念是系统、(__模型_)、仿真。 4.拟对某系统进行研究,首先要对系统作出明确的描述,即确定系统各个要素:实体、 属性、活动、(__状态_)、(_事件___)。 ?阶段性知识测试 5.系统仿真有三个基本的活动,即系统建模、仿真建模和(__仿真实验__),联系这 三个活动的是系统仿真的三要素,即系统、模型和计算机(硬件和软件)。 6.系统仿真的一般步骤是:(1)调研系统,明确问题、(2)(___设立目标,收集数据 __)、(3)建立仿真模型、(4)编制程序、(5)运行模型,计算结果、(6)(_统计分析,进行决策__) ?阶段性知识测试 7.仿真软件发展经历了四个阶段(1)高级程序语言阶段;(2)仿真程序包、初级仿 真语言阶段;(3)商业化仿真语言阶段;(4) (_一体化建模与仿真环境_)阶段。 8.常用的仿真软件有Arena、Automod、MATLAB、Promodel、(__WITNESS______)、 (______FLEXSIM___)。 9.求解简单系统问题的“原始”方法是(___解析解决____),借助(___实验__)可大大 提高该方法的效率和精度。 ?阶段性知识测试 10.排队系统可简化表示为A/B/C/D/E。其中A为到达模式;B为(服务模式)、C为服 务台数量、D为系统容量;E为排队规则。 11.常见的排队规则有:先到先服务、后到后服务、优先级服务、最短处理时间优先服 务、随机服务等。请以连线方式将下列排队规则名称的中英文对照起来。 先进先出FIFO 后进先出LIFO 随机服务SIRO 最短处理时间优先SPT 优先级服务PR ?阶段性知识测试 12.模型中,习惯称实体为成分。成分可分为主动成分和被动成分。请问排队系统中的 随机到达的顾客属于(主动)成分(主动/被动)。 13.事件是改变系统状态的瞬间变化的事情。一般指活动的开始和结束。事件可分为必 然事件(主要)、条件事件(次要)、系统事件。其中(______)一般不出现在将来事件表中(FEL)。 14.活动是具有指定长度的持续时间,其开始时间是确定。排队系统主要活动有 (_______)和服务活动。 ?阶段性知识测试 15.仿真时钟表示仿真时间的变量。Witness仿真系统中仿真钟用系统变量(TIME)表 示。 仿真策略,也称仿真算法。离散事件系统适用的仿真策略有(_事件调度法_)、活动扫描法、进程交互法、三阶段法等。 16.建立输入数据模型需要4个步骤:(1)从现实系统收集数据;(2)(_确定输入数据
模拟仿真软件介绍 模拟仿真技术发展至今,用于不同领域、不同对象的模拟仿真软件林林总总,不可胜数,仅对机械产品设计开发而言,就有机构运动仿真软件,结构仿真软件,动力学仿真软件,加工过程仿真软件(如:切削加工过程仿真软件、装配过程仿真软件、铸造模腔充填过程仿真软件、压力成型过程仿真软件等),操作训练仿真软件,以及生产管理过程仿真软件,企业经营过程仿真软件等等。这里仅以一种微机平台上的三维机构动态仿真软件为例,介绍模拟仿真软件的结构和功能。 DDM(Dynamic Designer Motion)是DTI(Design Technology International)公司推出的、工作于AutoCAD和MDT平台上的微机全功能三维机构动态仿真软件,包含全部运动学和动力学分析的功能,主要由建模器、求解器和仿真结果演示器三大模块组成(见图1)。 1.DDM建模器的功能 1)设定单位制。 2)定义重力加速度的大小和方向。 3)可以AutoCAD三维实体或普通图素(如直线、圆、圆弧)定义运动零件。 4)可以定义零件质量特性:
图1 DDM仿真软件模块结 ①如果将三维实体定义为零件,可以自动获得其质量特性。 ②如果用其他图素定义零件,则可人工设定质量特性。 5)可以定义各种铰链铰链用于连接发生装配关系的各个零件,系统提供六种基本铰链和两种特殊铰链。 基本铰链: ①旋转铰——沿一根轴旋转。 ②平移铰——沿一根轴移动。 ③旋转滑动铰——沿一根轴旋转和移动。 ④平面铰——在一个平面内移动并可沿平面法线旋转。 ⑤球铰——以一点为球心旋转。 ⑥十字铰——沿两根垂直轴旋转。 特殊铰链:
系统建模与仿真 开课对象:工业工程开课学期:6 学分:2学分;总学时:48学时;理论课学时:40学时; 实验学时:0 学时;上机学时:8学时 先修课程:概率论与数理统计 教材:系统建模与发展,齐欢,王小平编著,清华大学出版社,2004.7 参考书: 【1】离散事件系统建模与仿真,顾启泰,清华大学出版社 【2】现代系统建模与仿真技术,刘兴堂,西北工业大学出版社 【3】离散事件系统建模与仿真,王维平,国防科技大学出版社 【4】系统仿真导论,肖田元,清华大学出版社 【5】建模与仿真,王卫红,科学出版社 【6】仿真建模与分析(Simulaton Modeling and Analysis)(3rd eds.),Averill M. Law, W.David Kelton,清华大学出版社/McGraw-Hill 一、课程的性质、目的和任务 建模与仿真是当代现代科学技术的主要内容,其技术已渗透到各学科和工程技术领域。本课程以一般系统理论为基础,让学生掌握适用于任何领域的建模与仿真的一般理论框架和基本方法。 本课程的目的和任务是使学生: 1.掌握建模基本理论; 2.掌握仿真的基本方法; 3.掌握一种仿真语言及仿真软件; 4.能够运用建模与仿真方法分析、解决工业工程领域的各种常见问题。 二、课程的基本要求 1.了解建模与仿真的作用和发展,理解组成要素。 2.掌握建模的几种基本方法,及模型简化的技术手段。 3.掌握建模的一般系统理论,认识随机数的产生的原因及统计控制方式。 4.能对离散事件进行仿真,并能分析运行结果。 三、课程的基本内容及学时分配 第一章绪论(3学时) 1.系统、模型、仿真的基本概念
实验1 Witness仿真软件认识 一、实验目的 熟悉Witness 的启动;熟悉Witness2006用户界面;熟悉Witness 建模元素;熟悉Witness 建模与仿真过程。 二、实验内容 1、运行witness软件,了解软件界面及组成; 2、以一个简单流水线实例进行操作。小部件(widget)要经过称重、冲洗、加工和检测等操作。执行完每一步操作后小部件通过充当运输工具和缓存器的传送带(conveyer)传送至下一个操作单元。小部件在经过最后一道工序“检测”以后,脱离本模型系统。 三、实验步骤 仿真实例操作: 模型元素说明:widget 为加工的小部件名称;weigh、wash、produce、inspect 为四种加工机器,每种机器只有一台;C1、C2、C3 为三条输送链;ship 是系统提供的特殊区域,表示本仿真系统之外的某个地方; 操作步骤: 1:将所需元素布置在界面:
2:更改各元素名称: 如; 3:编辑各个元素的输入输出规则:
4: 运行一周(5 天*8 小时*60 分钟=2400 分钟),得到统计结果。5:仿真结果及分析: Widget: 各机器工作状态统计表:
分析:第一台机器效率最高位100%,第二台机器效率次之为79%,第三台和第四台机器效率低下,且空闲时间较多,可考虑加快传送带C2、C3的传送速度以及提高第二台机器的工作效率,以此来提高第三台和第四台机器的工作效率。 6:实验小结: 通过本次实验,我对Witness的操作界面及基本操作有了一个初步的掌握,同学会了对于一个简单的流水线生产线进行建模仿真,总体而言,实验非常成功。
系统建模与仿真习题三及答案 1.已知系统 )24(32)(21+++=s s s s s G 、2 103)(2+-=s s s G 求G 1(s)和G 2(s)分别进行串联、并联和反馈连接后的系统模型。 解: clc;clear; num1=[2 3]; den1=[1 4 2 0]; num2=[1 -3]; den2=[10 2]; G1=tf(num1,den1); G2=tf(num2,den2); Gs1=series(G1,G2) Gp1=parallel(G1,G2) Gf=feedback(G1,G2) 结果: Transfer function: 2 s^2 - 3 s - 9 ------------------------------ 10 s^4 + 42 s^3 + 28 s^2 + 4 s Transfer function: s^4 + s^3 + 10 s^2 + 28 s + 6 ------------------------------ 10 s^4 + 42 s^3 + 28 s^2 + 4 s Transfer function: 20 s^2 + 34 s + 6 -------------------------------- 10 s^4 + 42 s^3 + 30 s^2 + s – 9 2.某双闭环直流电动机控制系统如图所示:
利用feedback( )函数求系统的总模型。 解: 模型等价为: 编写程序: clc;clear; s=tf('s'); G1=1/(0.01*s+1); G2=(0.17*s+1)/(0.085*s); G3=G1; G4=(0.15*s+1)/(0.051*s); G5=70/(0.0067*s+1); G6=0.21/(0.15*s+1); G7=(s+2)/s; G8=0.1*G1; G9=0.0044/(0.01*s+1); sys1=feedback(G6*G7,0.212); sys2=feedback(sys1*G4*G5,G8*inv(G7)); sys=G1*feedback(sys2*G2*G3,G9) 结果: Transfer function:
基于AMESim的气动系统 建模与仿真技术研究(版本A)
本文主要内容如下 (1)推导气体的流量、温度和压力方程。 (2)基于AMESim对普通气动回路进行仿真分析。并推导气动系统常用元件的 数学方程,在此基础上对气动元件及系统进行模型仿真分析。 (3)对气动比例位置系统进行建模与仿真研究,在系统仿真模型基础上进行 故障仿真研究。最后探讨基于 AMESim 的气动比例位置系统实时仿真研究。
1.气动系统建模的理论基础 气动系统和元件建模的首要任务就是要充分的明确空气的物理性质和空气的热力学性质,为准确的元件建模和系统仿真奠定基础。气动元件的结构是十分复杂的,但其中的基本规律和数学描述一般还是比较清楚的。经过前人的大量研究发现,气动系统的动态特性从本质上讲可以抽象为由一些基本环节所组成,比如放气环节、惯性环节和气容充气环节等等。而它们之间又是通过压力、力、位移、容积等参数相互关联相互影响的。 1.1 流量方程 流量特性表示元件的空气流通能力,将直接影响气动系统的动态特性。 所有的压力降取决于下面两个基本参数: a)声速流导 C(Sonic Conductance)——[null] b)临界压力比b(Critical Pressure Ratio)[S*m4/kg] ISO6358标准孔口——
标准体积流量 设绝对温度T ,绝对压力p的工况下的体积流量为Q,基准状态和标准状态下的体积流量可表示为: 空气压缩机的输出流量通常用换算到吸入口的大气状态下的体积流量来表示。以上公式同样适用于从吸入口的大气状态到基准或标准状态的换算。 气动孔口流量 在气动系统中,一般需要计算通过节流口的气体压力、流量、温度等参数,但是由于气体的可压缩性,气体在通过节流口时是个很复杂的过程,节流口前后的流道突然收缩或扩张,气体在孔口前后均会形成涡流,产生强烈的摩擦,因而机械能变成热能具有不可逆过程。同时,由于流体运动的极不规则,同一界面上的各点参数极不均匀。为了研究气体的流量特性,基本上可将阀中的节流口理想地等价为一个小孔或收缩喷嘴,并用小孔或者收缩喷嘴的流量特性来表示其流量特性。
EDA仿真软件介绍 (2009-03-21 08:41) 分类:EDA EDA技术是在电子CAD技术基础上发展起来的计算机软件系统,是指以计算机为工作平台,融合了应用电子技术、计算机技术、信息处理及智能化技术的最新成果,进行电子产品的自动设计。利用EDA工具,电子设计师可以从概念、算法、协议等开始设计电子系统,大量工作可以通过计算机完成,并可以将电子产品从电路设计、性能分析到设计出IC版图或PCB版图的整个过程的计算机上自动处理完成。现在对EDA的概念或范畴用得很宽。包括在机械、电子、通信、航空航天、化工、矿产、生物、医学、军事等各个领域,都有EDA的应用。目前EDA 技术已在各大公司、企事业单位和科研教学部门广泛使用。例如在飞机制造过程中,从设计、性能测试及特性分析直到飞行模拟,都可能涉及到EDA技术。本文所指的EDA技术,主要针对电子电路设计、PCB设计和IC设计。 EDA设计可分为系统级、电路级和物理实现级。 2 EDA常用软件 EDA工具层出不穷,目前进入我国并具有广泛影响的EDA软件有:multiSIM7(原EWB的最新版本)、PSPICE、OrCAD、PCAD 、Protel、Viewlogic、Mentor、Graphics、Synopsys、LSIIogic、Cadence、MicroSim 等等。这些工具都有较强的功能, 一般可用于几个方面,例如很多软件都可以进行电路设计与仿真,同进还可以进行PCB自动布局布线,可输出多种网表文 件与第三方软件接口。 (下面是关于EDA的软件介绍,有兴趣的话,旧看看吧^^^) 下面按主要功能或主要应用场合,分为电路设计与仿真工具、PCB设计软件、IC 设计软件、PLD设计工具及其它EDA软件, 进行简单介绍。 2.1 电子电路设计与仿真工具 我们大家可能都用过试验板或者其他的东西制作过一些电子制做来进行实践。但是有的时候,我们会发现做出来的东西有 很多的问题,事先并没有想到,这样一来就浪费了我们的很多时间和物资。而且增加了产品的开发周期和延续了产品的上市时间从而使产品失去市场竞争优势。有没有能够不动用电烙铁试验板就能知道结果的方法呢?结论是有,这就是电路设计与仿真技术。
, 第12章 MATLAB Simulink系统仿真 习题12 一、选择题 1.启动Simulink后,屏幕上出现的窗口是()。A A.Simulink起始页 B.Simulink Library Browser窗口 C.Simulink Block Browser窗口 D.Simulink模型编辑窗口 2.模块的操作是在()窗口中进行的。D A.Library Browser B.Model Browser ( C.Block Editer D.模型编辑 3.Integrator模块包含在()模块库中。B A.Sources B.Continuous C.Sinks D.Math Operations 4.要在模型编辑窗口中复制模块,不正确的方法是()。B A.单击要复制的模块,按住鼠标左键并同时按下Ctrl键,移动鼠标到适当位置放开鼠标 B.单击要复制的模块,按住鼠标左键并同时按下Shift键,移动鼠标到适当位置放开鼠标 C.在模型编辑窗口选择Edit→Copy命令和Edit→Paste命令 D.右键单击要复制的模块,从快捷菜单中选择Copy命令和Paste命令 | 5.已知仿真模型如图12-41(a)所示,示波器的输出结果如图12-41(b)所示。 (a)仿真模型
(b )示波器输出结果 图12-41 习题仿真模型及仿真结果 则XY Graph 图形记录仪的输出结果是( )。C A .正弦曲线 B .余弦曲线 C .单位圆 D .椭圆 】 二、填空题 1.Simulink (能/不能)脱离MATLAB 环境运行。 2.建立Simulink 仿真模型是在 窗口进行的。模型编辑窗口 3.Simulink 仿真模型通常包括 、系统模块和 三种元素。 信号源(Source ),信宿(Sink ) 4.由控制信号控制执行的子系统称为 ,它分为 、 和 。 条件执行子系统,使能子系统,触发子系统,使能加触发子系统。 5.为子系统定制参数设置对话框和图标,使子系统本身有一个独立的操作界面,这种操作称为子系统的 。封装(Masking ) % 三、应用题 1.利用Simulink 仿真来实现摄氏温度到华氏温度的转换:9325f c T T = +。 2.利用Simulink 仿真)5cos 2513cos 91(cos 8)(2t ωt ωt ωπ A t x ++= ,取A=1,ω=2π。 3.设系统微分方程为 '(1)2y x y y =+??=? 试建立系统模型并仿真。 4.设计一个实现下面函数模块的子系统并对子系统进行封装。 Output = (Input1+ I nput2)×Input3-Input4
Multisim仿真软件的简要介绍 Multisim是In terctive Image Tech no logies公司推出的一个专门用于电子电 路仿真和设计的软件,目前在电路分析、仿真与设计等应用中较为广泛。该软件以图形界面为主,采用菜单栏、工具栏和热键相结合的方式,具有一般Windows 应用软件的界面风格,用户可以根据自己的习惯和熟练程度自如使用。尤其是多种可放置到设计电路中的虚拟仪表,使电路的仿真分析操作更符合工程技术人员的工作习惯。下面主要针对Multisim11.0软件中基本的仿真与分析方法做简单介绍。 EDA就是“ Electronic Design Automation ”的缩写技术已经在电子设计领域得到广泛应用。发达国家目前已经基本上不存在电子产品的手工设计。一台电子产品的设计过程,从概念的确立,到包括电路原理、PCB版图、单片 机程序、机内结构、FPGA的构建及仿真、外观界面、热稳定分析、电磁兼容分析在内的物理级设计再到PCB钻孔图、自动贴片、焊膏漏印、元器件清 单、总装配图等生产所需资料等等全部在计算机上完成。EDA已经成为集成 电路、印制电路板、电子整机系统设计的主要技术手段。 功能: 1. 直观的图形界面 整个操作界面就像一个电子实验工作台,绘制电路所需的元器件和仿真所需的测试仪器均可直接拖放到屏幕上,轻点鼠标可用导线将它们连接起来,软件仪器的控制面板和操作方式都与实物相似,测量数据、波形和特性曲线如同在真实仪器上看到的; 2. 丰富的元器件 提供了世界主流元件提供商的超过17000多种元件,同时能方便的对元 件各种参数进行编辑修改,能利用模型生成器以及代码模式创建模型等功能,创建自己的元器件。 3. 强大的仿真能力 以SPICE3F5和Xspice的内核作为仿真的引擎,通过Electronic workbench带有的增强设计功能将数字和混合模式的仿真性能进行优化。包括SPICE仿真、RF仿真、MCI B真、VHDL仿真、电路向导等功能。 4. 丰富的测试仪器 提供了22种虚拟仪器进行电路动作的测量: Multimeter(万用表)Function Generatoer(函数信号发生器)Wattmeter(瓦特表)Oscilloscope(示波器)Bode Plotter(波特仪)Word Generator(字符发生器Logic Analyzer(逻辑分析仪)Logic Converter(逻 辑转换仪)Distortion Analyer(失真度仪)Spectrum Analyzer(频谱仪)Network Analyzer(网络分析仪)Measurement Pribe(测量探针) Four Channel Oscilloscope(四踪示波器)Frequency Counter(频率计数器)IV An alyzer(伏安特性分析仪)Agile nt Simulated In strume nts(安捷伦仿真 仪器)Agile nt Oscilloscope(安捷伦示波器)Tektro nix Simulated
第一章系统建模与仿真概述 系统:系统是由两个以上相互区别或相互作用的单元有机的结合在起来,完成某一功能的综合体。 系统的特征:1.系统的整体性 2.系统的层次性 3.系统的相关系 4.系统的目的性 5.系统对环境的适应性系统: 模型:模型是对系统的特征要素,有关信息和变化规律的一种抽象表述、它反映 了系统某些本质属性,描述了系统各要素间的相互关系,系统与环境之间的相互 作用。 模型的意义:1.客观实体系统很难做试验,或者根本不能做实验。 2.对象问题虽然可以做试验,但是利用模型更便于理解。 3.模型易于操作,利用模型的参数变化来了解现实问题的本质和规 律更加经济方便。 系统模型的种类:抽象模型和形象模型 抽象模型:数学模型图形模型计算机模型概念模型 形象模型:模拟模型实体模型 建立模型的步骤: 1.弄清问题,掌握实际情况 2.搜集资料 3.确定因素之间的关系 4.构造建模 5.求解模型 6.检验模型的正确性 系统建模预防针的一般方法和步骤(P17) 仿真的发展趋势:建模方法面对对象仿真分布交互仿真人工智能与 计算机仿真虚拟现实仿真 Internet网上仿真 第二章商贸物流系统建模与仿真 商贸流通在社会经济中的地位与作用:1,商贸流通是连接生产和消费的纽带; 2,商贸流通对生产具有反作用; 3,商贸流通是国民经济现代化的支柱。 商贸活动的内容: 1,商流,对象物所有权转移的活动称为商流。 2,物流,是指事物从供给方向需求方的转移。
3,资金流,主要是指资金流的转移过程,包括付款,转账等过程,是 整个商贸活动的目的。 4,信息流,指商品信息的提供,商品促销信息,技术支持,售后服务 等内容,也包括诸如询单价,报单价,付款通知单,转账通知单等商业贸易单证以及交易 方的支付能力和支付信誉。 预测:所谓预测就是人们对某一不确定的或未知事件的表述。 预测的作用:从变化的事物中找出使事物发生变化的变化的固有规律,寻找和研究各种变化现象的背景及其演变的逻辑关系,从而去揭示事物未来的面貌。 判断预测方法:一,部门负责人评判预测法;二,销售人员估计法;三,德尔菲法;四, 历时类比法。 德尔菲法:依靠技术专家小组背靠背景来判断,来代替面对面的会议,是不同专家将分歧的幅度和理由都能够表达出来,经过客观分析以求达到客观规律的一致意见。 时间序列预测技术:一,移动平均预测法(计算题p30例2); 二,指数平均预测法。 DRP:是分销需求计划的简称,它是MRP原理和技术在流通领域中的应用。该技术主要解决分销物资的应用和调度问题,其基本目标是合理进行分销物资和资源配置,以达到既有效 地满足市场需求优势的配置费用最省的目的。 *DRP的基本概念 1.库存:指仓库或物流中心实际存在的物资数量。 2.安全库存:为便于生产经营活动正常进行,防止因需求货供应的波动 引起缺货或停工待料,经常在仓库各项目保持一定数量的计划库存量, 成为安全库存。 3.期初和期末库存:指在论述的时间段开始和结束时本单位的实际库存。 4.进货提前期:指从发出订货到所定货物运回并入库所需要的时间长度。 5.送货提前期:指从接收订单到货物送到用户手中并接收入库的时间长度。 6.在途物资:指供应商已经接受订单备货,但尚未来到本单位入库的物资。 7.订货批量:指一次订货所订的物资数量。 8.时间周期:就是根据实际需要划分的时间段信息,如一日,周,月划分。 9.计划期:是指DRP尽心运算的整个时间段,可能是一个月,一个季度 或一年,他可划分为几个计划周期。 10.物流中心:从事物流活动的具有完善的信息网络的场所或组织。 BOD简介:B OD是MRP中物料清单BOM的概念和结构在分销领域的运用,它同BOM在产品结构树中连接各零件和成品一样,在供应方和各个需求方之间架起了一座沟通的桥梁。 DRP在分销网络中的运作原理(p43DRP原理图)
Saber 软件简介 Saber软件主要用于外围电路的仿真模拟,包括SaberSketch 和SaberDesigner两部分。SaberSketch用于绘制电路图,而SaberDesigner用于对电路仿真模拟,模拟结果可在SaberScope 和DesignProbe中查看。Saber的特点归纳有以下几条: 1.集成度高:从调用画图程序到仿真模拟,可以在一个环境中完成,不用四处切换工作环境。 2.完整的图形查看功能:Saber提供了SaberScope和DesignProbe来查看仿真结果,而SaberScope功能更加强 大。 3.各种完整的高级仿真:可进行偏置点分析、DC分析、AC分析、瞬态分析、温度分析、参数分析、傅立叶分析、蒙特卡诺分析、噪声分析、应力分析、失真分析等。 4.模块化和层次化:可将一部分电路块创建成一个符号表示,用于层次设计,并可对子电路和整体电路仿真模拟。 5.模拟行为模型:对电路在实际应用中的可能遇到的情况,如温度变化及各部件参数漂移等,进行仿真模拟。
第一章用SaberSketch画电路图 在SaberSketch的画图工具中包括了模拟电路、数字电路、机械等模拟技术库,也可以大致分成原有库和自定义库。要调用库,在Parts Gallery中,通过对库的描述、符号名称、MAST模板名称等,进行搜索。 画完电路图后,在SaberSketch界面可以直接调用SaberGuide对电路进行模拟,SaberGuide的所有功能在SaberSketch中都可以直接调用。 ?启动SaberSketch SaberSketch包含电路图和符号编辑器,在电路图编辑器中,可以创建电路图。如果要把电路图作为一个更大系统的一部分,可以用SaberSketch将该电路图用一个符号表示,作为一个块电路使用。启动SaberSketch: ▲UNIX:在UNIX窗口中键入Sketch ▲Windows NT:在SaberDesigner程序组中双击SaberSketch图标 下面是SaberSketch的用户界面及主要部分名称,见图1-1: 退出SaberSketch用File>Exit。 ?打开电路图编辑窗口 在启动SaberSketch后,要打开电路图编辑窗口,操作如下:▲要创建一个新的设计,选择File>New>Design,或者点击快捷图标,会打开一个空白窗口。 ▲要打开一个已有的设计,选择File>Open>Design,或者点击快捷图标,
《建模与仿真及其医学应用》 实验讲义 天津医科大学生物医学工程系 2004年
实验一 系统建模的MATLAB 实现 一、实验目的: 1.学习MATLAB 基本知识。 2.掌握数学模型的MATLAB 实现:时域模型、状态空间模型和零极点模型。 3.学习用MATLAB 实现系统外部模型到内部模型的转换。 4.学习用MATLAB 实现系统模型的连接:串联、并联、反馈连接。 5.了解模型降阶的MATLAB 实现。 二、实验内容 1.系统的实现、外部模型到内部模型的转换 (1)给定连续系统的传递函数) 1343)(32()52)(8()(22++++++=s s s s s s s G ,利用MATLAB 建立传递函数模型,微分方程,并转换为状态空间模型。 (2)已知某系统的状态方程的系数矩阵为: ??????--=3210a ??????=1101b ??????????=210011c ???? ??????=100010d 利用MATLAB 建立状态空间模型,并将其转换为传递函数模型和零极点模型。 (3)已知系统的零极点传递函数为)4)(3)(2()1(2)(++++=s s s s s G ,利用MATLAB 转换为传递函数模型和状态空间模型。 2.系统的离散、连接、降阶 (1)给定连续系统的传递函数) 1343)(32()52)(8()(22++++++=s s s s s s s G ,将该连
续系统的传递函数用零阶重构器和一阶重构器转换为离散型传递函数,抽样时间T=1秒。 (2)该系统与系统5 61)(2++=s s s H 分别①串联②并联③负反馈连接,求出组成的新系统的传递函数模型。 (3)将串联组成的新系统进行降阶处理,求出降阶后系统的模型,并用plot 图形比较降阶前后系统的阶跃响应。 要求:将以上过程用MATLAB 编程(M 文件)实现,运行输出结果。 三、实验说明—关于系统建模的主要MATLAB 函数 1.建立传递函数模型:tf 函数 : 格式:sys=tf(num,den) num=[b m ,b m-1,……,b 0] 分子多项式系数 den=[a n ,a n-1,……,a 0] 分母多项式系数 2.建立状态空间模型:ss 函数 : 格式:sys=ss(a,b,c,d) %a,b,c,d 为状态方程系数矩阵 sys=ss(a,b,c,d,T) %产生离散时间状态空间模型 3.建立零极点模型的函数:zpk 格式:sys=zpk(z,p,k) 4.模型转换函数: tf2ss tf2zp ss2tf ss2zp zp2tf zp2ss %2为to 的意思 格式:[a,b,c,d]=tf2ss(num,den) [z,p,k]=tf2zp(num,den) [num,den]=ss2tf(a,b,c,d,iu) %iu 指定是哪个输入 [z,p,k]=ss2zp(a,b,c,d,iu)]
第一章习题 1-1什么是仿真?它所遵循的基本原则是什么? 答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。 它所遵循的基本原则是相似原理。 1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点? 答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性。 仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法。 1-3数字仿真包括那几个要素?其关系如何? 答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验。 1-4为什么说模拟仿真较数字仿真精度低?其优点如何?。 答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低 但模拟仿真具有如下优点: (1)描述连续的物理系统的动态过程比较自然和逼真。 (2)仿真速度极快,失真小,结果可信度高。 (3)能快速求解微分方程。模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关。 (4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。