计算机视觉定位操作
先决条件
1. 雷射镜头已做过校正。
2. 雷射与CCD 设备位置皆固定不变。
3. 已安装CCD 驱动程序。
操作方式
1. 汇入CVP 外挂模块
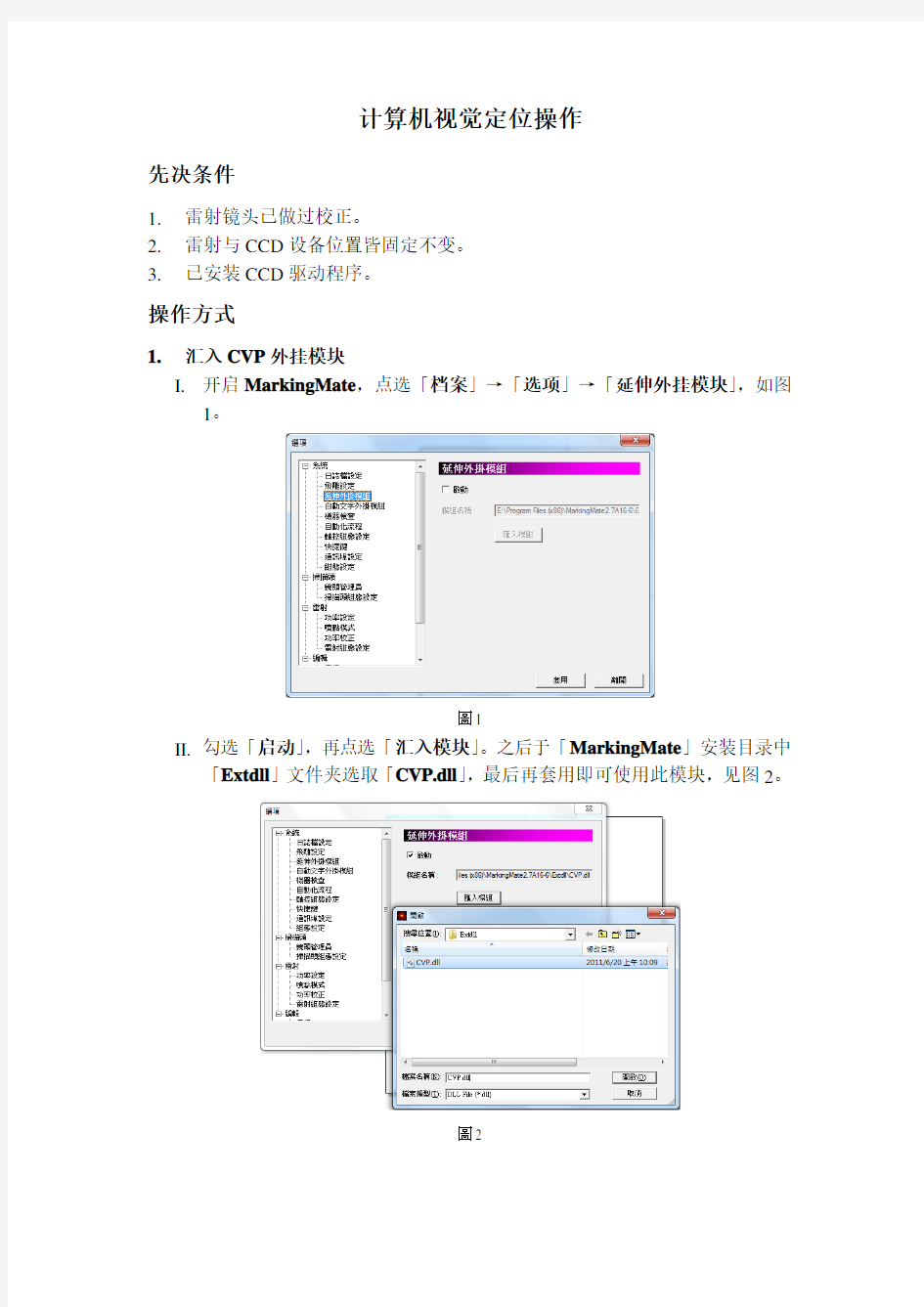
I. 开启MarkingMate ,点选「档案」→「选项」→「延伸外挂模块」,如图1。
II. 勾选「启动」,再点选「汇入模块」。之后于「MarkingMate 」安装目录中「Extdll 」文件夹选取「CVP.dll 」,最后再套用即可使用此模块,见图2。
圖1
圖2
2. CCD 镜头校正
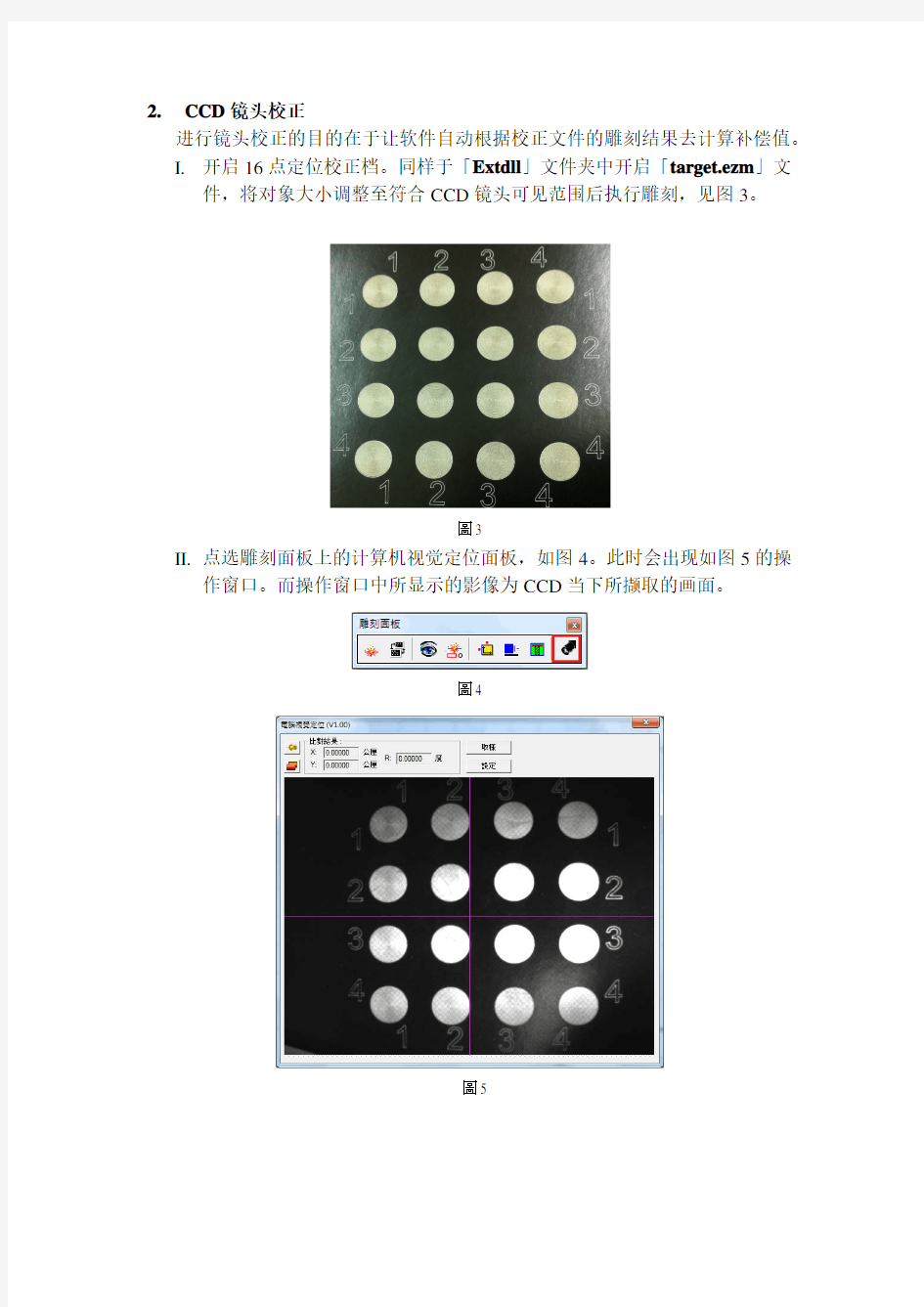
进行镜头校正的目的在于让软件自动根据校正文件的雕刻结果去计算补偿值。 I. 开启16点定位校正档。同样于「Extdll 」文件夹中开启「target.ezm 」文件,将对象大小调整至符合CCD 镜头可见范围后执行雕刻,见图3。
II. 点选雕刻面板上的计算机视觉定位面板,如图4。此时会出现如图5的操作窗口。而操作窗口中所显示的影像为CCD 当下所撷取的画面。
圖3
圖4 圖5
决定是否将计算机视觉定位操作窗口固定在所有开启程序的最上
层。
决定放大或缩小计算机视觉定位操作窗口。
取样:按此按钮开启「取样对话盒」,可进行「取样」与「比对」。
设定:按此按钮开启「CCD 设定」对话盒,可进行「校正」。
III. 点选设定,会出现CCD 设定对话盒,如图6。之后点选校正,进入校正窗口进行16点校正。
CVP 模式:依照实际情况选择单工业相机或是双工业相机。
启动低光源模式:当光源不足的时候,可以启用此功能。
IV. 进入校正窗口后,计算机视觉定位的影像部分会出现一个侦测标靶,如图
7。移动标靶依序寻找每个点的圆心(由左至右,由上而下),最后按下完成即可完成校正。标靶的半径可由侦测半径调整。标靶大小建议要比点还要大一些,如此才能更精准。
圖6
圖7
3. 取样
CCD 镜头校正之后,便可将欲打标的工件放置于CCD 镜头的可见范围内。此时,需于工件上寻找两个明显的标靶,此步骤称为取样。操作步骤如下。 I. 于计算机视觉定位面板上点选取样,此时会出现取样对话盒。
II. 于取样对话盒选取标靶-[1],之后按下取样。此时影像部分会出现一个蓝色小框,使用者可缩放此小框并将其移动至第一个标靶的位置,如图8,最后再击点取样。
III. 标靶1取样完毕之后,可按下比对,系统会自行去搜寻标靶1。如果比对失败,此时会出现错误讯息,用户必须重新取样。
IV. 比对无误之后,移至标靶-[2]再重复上述步骤,皆无误之后,即完成取样动作。
相似度:CCD 的影像常常会因为光影或是对象本身的外观等等因素导致某些标靶判讀不易,此时可以调整相似度。范围是从 -1 ~ 1(预设为0.80),越接近1代表相似度要越高才能比对成功。若是比对结果的相似度低于该设定值,就会发生找不到标靶的狀况。
误差角度:当对象摆放的位置并非完全平行于取样时标靶的位置时,也有可能会判讀失败,此时必须酌量增加误差角度。但若角度设定过大,则越有可能使判讀的时间加长(预设为30度)。
4. 实际应用
完成校正与取样动作之后,即可进行打标。若工件有所偏移时,系统会自动去搜寻标靶1与标靶2,进而算出正确的雕刻位置,使每次雕刻结果都在同一位置上。
注意:若工件偏移的角度太大,有可能会发生搜寻不到标靶的情况。
圖8
计算机视觉与图像理解 摘要 精确的特征跟踪是计算机视觉中的许多高层次的任务,如三维建模及运动分析奠定了基础。虽然有许多特征跟踪算法,他们大多对被跟踪的数据没有错误信息。但是,由于困难和空间局部性的问题,现有的方法会产生非常不正确的对应方式,造成剔除了基本的后处理步骤。我们提出了一个新的通用框架,使用Unscented转换,以增加任意变换特征跟踪算法,并使用高斯随机变量来表示位置的不确定性。我们运用和验证了金出武雄,卢卡斯- Tomasi 的跟踪功能框架,并将其命名为Unscented康莱特(UKLT)。UKLT能跟踪并拒绝不正确的应对措施。并证明对真假序列的方法真确性,并演示UKLT能做出正确不误的判断出物体的位置。 1.简介 在计算机视觉,对问题反映的准确性取决于于图像的准确测定。特征跟踪会随时间变化对变化的图像进行处理,并更新每个功能的变化作为图像的位置判断。重要的是所选择图像的功能,有足够的信息来跟踪,而且不遭受光圈问题的影响。[1] 在金出武雄,卢卡斯- Tomasi(康莱特)是最知名的跟踪和研究方法之一。它采用一对匹配准则刚性平移模型,它是相当于窗口强度的平方差之和最小化的基础。特征点的正确选择,可大大提高算法的性能。[3] Shi与Tomasi 将初始算法考虑仿射模型,并提出了技术监测的功能对质量进行跟踪。如果第一场比赛中的图像区域之间和当前帧残留超过阈值时,该功能将被拒绝。在随后的工作中,对模型进行了扩展且考虑了光照和反射的变化。 不幸的是,这些算法没有考虑在跟踪的不确定性,和估计的可靠性。如果我们能够考虑到这些问题,我们将能从混乱的数据中提取出更准确的数据。在没有不确定性特设技术条件下,有些研究员试图从中提取有用的数据但是结果都不能令人满意。但是理论上有声音的不确定性为特征跟踪,是可以应用于不同的功能类型的方法。 在一个闭塞,模糊,光照变化的环境中,即使是最复杂的特征跟踪算法一败涂地无法准确跟踪。这些问题导致错误的匹配,就是离群值。虽然有几种方法来减轻异常值的影响,但是其计算成本通常较高[7] [8]。[9]采用随机抽样一致性[10]的方法来消除图像序列异常值。Fusiello提出的康莱特,增加了一种自动拒绝规则功能,所谓的X84。虽然有许多离群排斥的方法,但没有一个单一的算法,尽管该算法在所有情况下都表现良好。 在本文中我们将研究范围扩大,运用高斯随机变量(GRVs)与Unscented变换(SUT 的),计算在一个非线性变换的分布传播,运用标准康莱特算法。采用随机变量来描述图像特征的位置和它们的不确定性既提高了精度又提高了鲁棒性的跟踪过程。虽然我们不知道什么是真正的分布,被测系统为我们提供了理论保证,前两个时刻的估计是正确的。另外,使用异常检测被测样品确定性使我们没有增加任何额外费用。 2.不确定度表示 我们现在引入一个新的通用框架,增强了任意特征跟踪算法,以代表和跟踪高斯随机变量(GRVs)功能的位置。然后,我们说明它可以被应用到最常用的方法,康莱特之一[1]。 GRVs是一种用于图像的特征定位概率分布函数描述的不错选择。他们有一个简单易懂的数学公式(平均向量和协方差矩阵)和紧凑的计算实施。他们也有一个确切的封闭使用的线性代数运算的代数线性变换的制定,并以此作为其参数表示的两个分布的第一时刻。Haralick [13]虽然提出了在计算机视觉中使用协方差传递,但他只考虑一阶线性化。 易用性外,还出现了一些有效的文献,它质疑从本地的图像灰度信息测量协方差是否可以代表的功能位置的不确定性[6]。
计算机视觉定位操作 先决条件 1. 雷射镜头已做过校正。 2. 雷射与CCD 设备位置皆固定不变。 3. 已安装CCD 驱动程序。 操作方式 1. 汇入CVP 外挂模块 I. 开启MarkingMate ,点选「档案」→「选项」→「延伸外挂模块」,如图1。 II. 勾选「启动」,再点选「汇入模块」。之后于「MarkingMate 」安装目录中「Extdll 」文件夹选取「CVP.dll 」,最后再套用即可使用此模块,见图2。 圖1 圖2
2. CCD 镜头校正 进行镜头校正的目的在于让软件自动根据校正文件的雕刻结果去计算补偿值。 I. 开启16点定位校正档。同样于「Extdll 」文件夹中开启「target.ezm 」文件,将对象大小调整至符合CCD 镜头可见范围后执行雕刻,见图3。 II. 点选雕刻面板上的计算机视觉定位面板,如图4。此时会出现如图5的操作窗口。而操作窗口中所显示的影像为CCD 当下所撷取的画面。 圖3 圖4 圖5
决定是否将计算机视觉定位操作窗口固定在所有开启程序的最上 层。 决定放大或缩小计算机视觉定位操作窗口。 取样:按此按钮开启「取样对话盒」,可进行「取样」与「比对」。 设定:按此按钮开启「CCD 设定」对话盒,可进行「校正」。 III. 点选设定,会出现CCD 设定对话盒,如图6。之后点选校正,进入校正窗口进行16点校正。 CVP 模式:依照实际情况选择单工业相机或是双工业相机。 启动低光源模式:当光源不足的时候,可以启用此功能。 IV. 进入校正窗口后,计算机视觉定位的影像部分会出现一个侦测标靶,如图 7。移动标靶依序寻找每个点的圆心(由左至右,由上而下),最后按下完成即可完成校正。标靶的半径可由侦测半径调整。标靶大小建议要比点还要大一些,如此才能更精准。 圖6 圖7
《图像理解与计算机视觉》习题 1. 一幅图像的象素灰度级为256、大小为1024×1024的图象的数据量多少MB?假设网络的平均传输速率为1Mbit/s,需要多少秒才能传送完毕?每个像素可以用8比特表示。 解答:图像的数据量是1024×1024×8/8=1 MB,需要8 秒才能传送完毕。 2. 通过你对生活的观察,举出一个书本描述之外的图像处理应用的领域和例子。 解答: 医院CT检查,等。 I f x y z t的各个参数的具体含义,反映的图像类型有多 3. 请说明图像亮度函数(,,,,) 少? 解答: I f x y z t中,(x,y,z)是空间坐标,λ是波长,t 是时间,I 是 图像数学表达式(,,,,) 光点(x,y,z)的强度(幅度)。上式表示一幅运动(t) 的、彩色/多光谱(λ) 的、立体(x,y,z)图像。 I f x y z t表示一幅运动(t) 的、彩色/多光谱(λ) 的、立体(x,y,z)图像。对 (,,,,) 于静止图像,则与时间t 无关;对于单色图像(也称灰度图像),则波长λ为一常数;对于平面图像,则与坐标z 无关,故f(x,y)表示平面上的静止灰度图像,它是一般图像I f x y z t的一个特例。 (,,,,) 4. 色彩具有哪几个基本属性,表述这些属性的含义。 解答: 色相(H):色相是与颜色主波长有关的颜色物理和心理特性,它们就是所有的色相,有时色相也称为色调。 饱和度(S):饱和度指颜色的强度或纯度,表示色相中灰色成分所占的比例,用0%-100%(纯色)来表示。 亮度(B):亮度是颜色的相对明暗程度,通常用0%(黑)-100%(白)来度量。 5. 请解释马赫带效应。 解答: 所谓“马赫带效应(Mach band effect)”是指视觉的主观感受在亮度有变化的地方
计算机视觉 计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理,用电脑处理成为更适合人眼观察或传送给仪器检测的图像。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取‘信息’的人工智能系统。这里所指的信息指Shannon定义的,可以用来帮助做一个“决定”的信息。因为感知可以看作是从感官信号中提取信息,所以计算机视觉也可以看作是研究如何使人工系统从图像或多维数据中“感知”的科学。 目录 1定义 2解析 3原理 4相关 5现状 6用途 7异同 8问题
9系统 10要件 11会议 12期刊 1定义 计算机视觉是使用计算机及相关设备对生物视觉的一种模拟。它的主要任务就是通过对采集的图片或视频进行处理以获得相应场景的三维信息,就像人类和许多其他类生物每天所做的那样。 计算机视觉是一门关于如何运用照相机和计算机来获取我们所需的,被拍摄对象的数据与信息的学问。形象地说,就是给计算机安装上眼睛(照相机)和大脑(算法),让计算机能够感知环境。我们中国人的成语"眼见为实"和西方人常说的"One picture is worth ten thousand words"表达了视觉对人类的重要性。不难想象,具有视觉的机器的应用前景能有多么地宽广。 计算机视觉既是工程领域,也是科学领域中的一个富有挑战性重要研究领域。计算机视觉是一门综合性的学科,它已经吸引了来自各个学科的研究者参加到对它
的研究之中。其中包括计算机科学和工程、信号处理、物理学、应用数学和统计学,神经生理学和认知科学等。 2解析 视觉是各个应用领域,如制造业、检验、文档分析、医疗诊断,和军事等领域中各种智能/自主系统中不可分割的一部分。由于它的重要性,一些先进国家,例如美国把对计算机视觉的 计算机视觉与其他领域的关系 研究列为对经济和科学有广泛影响的科学和工程中的重大基本问题,即所谓的重大挑战(grand challenge)。计算机视觉的挑战是要为计算机和机器人开发具有与人类水平相当的视觉能力。机器视觉需要图象信号,纹理和颜色建模,几何处理和推理,以及物体建模。一个有能力的视觉系统应该把所有这些处理都紧密地集成在一起。作为一门学科,计算机视觉开始于60年代初,但在计算机视觉的基本研究中的许多重要进展是在80年代取得的。计算机视觉与人类视觉密切相关,对人类视觉有一个正确的认识将对计算机视觉的研究非常有益。为此我们将先介绍人类视觉。 3原理 计算机视觉就是用各种成象系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释。计算机视觉的最终研究目标就是使计算机能象人那样通过视觉观察和理解世界,具有自主适应环境的能力。要经过长期的努力才能达到的目标。因此,在实现最终目标以前,人们努力的中期目标是建立一种视觉系统,这个系统能依据视觉敏感和反馈的某种程度的智能完成一定的任务。例如,计算机视觉的一个重要应用领域就是自主车辆的视觉导航,还没有条件实现象人那样能识别和理解任何环境,完成自主导航的系统。因此,人们努力的研究目标是实现在高速公路上具有道路跟踪能力,可避免与前方车辆碰撞的视觉辅助驾驶系统。这里要指出的一点是在计算机视觉系统中计算机起代替人脑的作用,但并不意味
人们常说:眼睛是心灵的窗户,通过眼睛人们可以轻易地交流情感,眼睛也是与外界交流的窗口,这些都是通过“看”来完成的。 人们可以很容易“看到”一幅画,但这一“简单”过程并不如此简单,大致上它可以分为以下几个阶段:首先是通过眼睛将图成像在视网膜上;其次大脑对图像进行理解;最后根据处理的结果做出反应。用比较专业一点的语言来描述,该过程包括了识别、描述与理解三个层次;这其中还隐含了边缘检测(各物体的轮廓等)、图像的分割(各物体区域的划分)等阶段。以上实际上概述了视觉系统的三个层次,即低层阶段:基于图像特征提取及分割阶段;中层阶段:基于物体的几何模型与图像特性表达阶段;高层阶段:基于景物知识的描述、识别与理解阶段,这是根据先验知识介入的程度划分的,且实现起来也越来越困难。 毫无疑问,如何人工实现这一过程是极具挑战性和应用前景的一项工作,计算机视觉也因此而应运而生。计算机视觉是研究用计算机和成像设备来模拟人和生物视觉系统功能的技术学科,其目标是从图像或图像序列中获取对外部世界的认知和理解,即利用二维图像恢复三维环境中物体的几何信息,比如形状、位置、姿态、运动等,并能描述、识别与理解。 计算机视觉的基础是各种成像设备,例如CCD(Charge Coupled Device )摄像机(数码相机属于此类型)、红外摄像机、医学上常用的核磁共振成像、X射线成像等,这些设备不仅可以成像,还可以获取比人眼更丰富的图像,人们可以形象地把摄像机看成计算机视觉的视网膜部分。可以说从人类拍摄出第一幅图像开始,就为计算机视觉的诞生奠定了基础。 而计算机视觉的核心是数字电子计算机,其发展可谓突飞猛进,在计算和存储能力上,人脑已经无法与之相比,人们的目标就是利用计算机非凡的计算处理能力来代替人脑实现对图像的理解,而计算机日新月异的发展也使得这一愿望越来越成为可能。 用于指导“计算机”这个大脑运作的核心是计算机视觉的理论方法,计算机视觉使用的理论方法主要基于几何、概率和运动学计算与三维重构的视觉计算理论,它的基础包括射影几何学、刚体运动力学、概率论与随机过程、图像处理、人工智能等理论。在20世纪70年代,视觉研究大多采用模式识别的方法;80年代,开始采用空间几何的方法以及物理知识进行视觉研究;90年代以后,随着智能机器人视觉研究的发展,引入了许多新的理论与技术如主动视觉理论、不变量理论、融合技术等,并应用于许多计算机视觉系统中。 研究计算机视觉,不得不提的是英国已故科学家戴维·马尔(David Marr),他在计算机视觉发展史上可谓写下了浓重的一笔。在20世纪70年代末,他提出了第一个
一、 1.什么是计算机视觉?理解计算机视觉问题的产生原理。 研究用计算机来模拟生物视觉功能的技术学科。具体来说,就是让计算机具有对周围世界的空间物体进行 传感、抽象、分析判断、决策的能力,从而达到识别、理解的目的。 2.直方图的均衡化 处理的“中心思想”是把原始图像的灰度直方图从比较集中的某个灰度区间变成在全部灰度范围内的均匀分布。直方 图均衡化就是对图像进行非线性拉伸,重新分配图像像素值,使一定灰度范围内的像素数量大致相同。直方图均衡化就是 把给定图像的直方图分布改变成“均匀”分布直方图分布。 是将原图像通过某种变换,得到一幅灰度直方图更为均匀分布的新图像的方法。设图像均衡化处理后,图像的直方图 是平直的,即各灰度级具有相同的出现频数,那么由于灰度级具有均匀的概率分布,图像看起来就更清晰了。 二、 1.常见的几何变换:平移T x为点(x,y)在x方向要平移的量。 旋转 变尺度:x轴变大a倍,y轴变大b倍。 2.卷积掩膜技术:(,) (,)(,)(,) m n f i j h i m j n g m n =-- ∑∑ 对应相乘再相加掩膜的有效应用——去噪问题 3. 均值滤波器(低通):抑制噪声 主要用于抑制噪声,对每一个目标像素值用其局部邻域内所有像素值的加权均值置换。con命令高斯滤波器:一个朴素的道理,距离目标像素越近的点,往往相关性越大,越远则越不相干。所以,高斯 滤波器根据高斯函数选择邻域内各像素的权值 medfilt1 。 区别方法是:高通滤波器模板的和为0,低通滤波器模板的和为1 常用的非线性滤波器:中值滤波;双边滤波;非局部滤波 4.边缘检测算子:通过一组定义好的函数,定位图像中局部变换剧烈的部分(寻找图像边缘)。主要方法有:Robert 交叉梯度,Sobel梯度,拉普拉斯算子,高提升滤波,高斯-拉普拉斯变换(都是高通滤波器) 1100 cos sin0 [1][1]sin cos0 001 x y x y θθ θθ - ?? ? = ? ? ?? 1100 00 [1][1]00 00 a x y x y b ab ?? ? = ? ? ?? (,) 1 [,][,] k l N h i j f k l M∈ =∑ ? ? ? ? ? ? ? = 1 1 1 ]1 [ ]1 [ 1 1 y x T T y x y x
计算机视觉在各个方面的应用 摘要 计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理,用电脑处理成为更适合人眼观察或传送给仪器检测的图像。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取‘信息’的人工智能系统。这里所指的信息指Shannon定义的,可以用来帮助做一个“决定”的信息。因为感知可以看作是从感官信号中提取信息,所以计算机视觉也可以看作是研究如何使人工系统从图像或多维数据中“感知”的科学。 关键词:图像处理,模式识别,图像理解。 正文 1.1序言 计算机视觉是使用计算机及相关设备对生物视觉的一种模拟。它的主要任务就是通过对采集的图片或视频进行处理以获得相应场景的三维信息,就像人类和许多其他类生物每天所做的那样。 计算机视觉既是工程领域,也是科学领域中的一个富有挑战性重要研究领域。计算机视觉是一门综合性的学科,它已经吸引了来自各个学科的研究者参加到对它的研究之中。其中包括计算计科学和工程、信号处理、物理学、应用数学和统计学,神经生理学和认知科学等。 所需要的知识储备以及相关课程如下, 图1-1 图1-2
1.1.2 现阶段的形式 视觉是各个应用领域,如制造业、检验、文档分析、医疗诊断,和军事等领域中各种智能/自主系统中不可分割的一部分。由于它的重要性,一些先进国家,例如美国把对计算机视觉的 图1-3计算机视觉与其他领域的关系 研究列为对经济和科学有广泛影响的科学和工程中的重大基本问题,即所谓的重大挑战(grand challenge)。计算机视觉的挑战是要为计算机和机器人开发具有与人类水平相当的视觉能力。机器视觉需要图象信号,纹理和颜色建模,几何处理和推理,以及物体建模。一个有能力的视觉系统应该把所有这些处理都紧密地集成在一起。作为一门学科,计算机视觉开始于60年代初,但在计算机视觉的基本研究中的许多重要进展是在80年代取得的。计算机视觉与人类视觉密切相关,对人类视觉有一个正确的认识将对计算机视觉的研究非常有益。为此我们将先介绍人类视觉。 人类正在进入信息时代,计算机将越来越广泛地进入几乎所有领域。一方面是更多未经计算机专业训练的人也需要应用计算机,而另一方面是计算机的功能越来越强,使用方法越来越复杂。这就使人在进行交谈和通讯时的灵活性与目前在使用计算机时所要求的严格和死板之间产生了尖锐的矛盾。人可通过视觉和听觉,语言与外界交换信息,并且可用不同的方式表示相同的含义,而目前的计算机却要求严格按照各种程序语言来编写程序,只有这样计算机才能运行。为使更多的人能使用复杂的计算机,必须改变过去的那种让人来适应计算机,来死记硬背计算机的使用规则的情况。而是反过来让计算机来适应人的习惯和要求,以人所习惯的方式与人进行信息交换,也就是让计算机具有视觉、听觉和说话等能力。这时计算机必须具有逻辑推理和决策的能力。具有上述能力的计算机就是智能计算机。 智能计算机不但使计算机更便于为人们所使用,同时如果用这样的计算机来控制各种自动化装置特别是智能机器人,就可以使这些自动化系统和智能机器人具有适应环境,和自主作出决策的能力。这就可以在各种场合取代人的繁重工作,或代替人到各种危险和恶劣环境中完成任务。 1.1.3 简单原理 计算机视觉就是用各种成象系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释。计算机视觉的最终研究目标就是使计算机能象人那样通过视觉观察和理解世界,具有自主适应环境的能力。要经过长期的努力才能达到的目标。因此,在实现最终目标以前,人们努力的中期目标是建立一种视觉系统,这个系统能依据视觉敏感和反馈的某种程度的智能完成一定的任务。例如,计算机视觉的一个重
视觉研究中投入巨大,在IEEE 模式分析与机器智能汇刊(IEEE Transactions on Pattern Analysis and Machine Intelligence, IEEE TPAMI)、计算机视觉国际期刊(International Journal of Computer Vision, IJCV)、IEEE图像处理汇刊(IEEE Transactions on Image Processing, IEEE TIP)、IEEE国际计算机视觉大会(IEEE Inter-national Conference on Computer Vision, IEEE ICCV)和IEEE国际计算机视觉与模式识别会议(IEEE Conference on Computer Vi-sion and Pattern Recognition, IEEE CVPR)等顶级国际期刊和会议上发表了许多重要学术论文,产生了许多国际一流的研究成果。其中最受到关注的研究是深度学习,而深度学习领域发表的论文70%以上是关于视觉图像识别方面的。 为了更好地开展学术交流,推动国内计算机视觉学科发展,进一步提升我国计算机视觉研究在国际领域的影响力,中国计算机学会成立了“计算机视觉专业组”。在本期专题中,计算机视觉专业组特别邀请了多位著名的视觉专家从不同角度撰文,介绍计算机视觉前沿与深度学习研究方面的最新进展。 香港中文大学助理教授王晓刚、博士孙祎、教授汤晓鸥共同撰写的《从统一子空间分析到联合深度学习:人脸识别的十年历程》文章,回顾了人脸识别近十年的发展历程。他们的团队使用深度学习开发了DeepID2+系统,在人脸识别最受关注的LFW(labeled faces in the wild)1数据集上取得了人脸确认任务的世界第一,识别率99.47%。深度学习在人脸识别上的巨大成功,并非只是利用复杂模型拟合数据集。DeepID2+系统的神经元响应有很多重要的性质,比如它是中度稀疏的,对人物身份和人脸属性有很强的选择性,对局部遮挡具有良好的鲁棒性。这些性 计算机视觉通常是指用摄像机和计算机代替人眼对目标进行识别、跟踪/测量来实现对客观三维世界的理解。计算机视觉既是科学领域中富有挑战性的理论研究,也是工程领域中的重要应用,在图像检索、安全监控、人机交互、医疗诊断和机器人等领域具有广阔的应用前景。美国和欧洲等先进国家将计算机视觉列为对经济和科学有广泛影响的重大基本问题,计算机视觉也是“谷歌大脑”、“百度大脑”等研究计划中的核心项目。 计算机视觉作为一门学科始于20世纪60年代。随着个人计算机的普及,计算机视觉在80年代取得了重要进展。最近10年,随着计算机性能的大幅提升和互联网的快速发展,新的视觉特征、大数据、稀疏低秩、深度学习等技术的不断涌现,使计算机视觉又迎来了一次突飞猛进的发展,开辟出许多新的研究领域。国内高校与科研单位在计算机特邀编辑:王 涛1 查红彬2 1爱奇艺公司 2北京大学 计算机视觉前沿与深度学习关键词:计算机视觉 深度学习 1 标注过的户外脸部测试数据集。
中国矿业大学公选课计算机视觉论文 学院:计算机科学与技术 班级:信安10-2 姓名:吴健东 学号:08103695 2011年10月
(一)引言: 计算机视觉是人工智能领域的一个重要部分,它的研究目标是使计算机具有通过二维图像认知三维环境信息的视觉是以图象处理技术、信号处理技术、概率统计分析、计算几何、神经网络、机器学习理论和计算机信息处理技术等计算机分析与处理视觉信息。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维信息的人工系统。计算机视觉是一门综合性的学科,它已经吸引了来自各个学科的研究者参加到对它的研究之中。其中有计算机学和工程、信号处理、物理学、应用数学和统计学,神经生理学和认知科学等。计算机视觉也是当前计算机科学中的一领域,计算机视觉领域与图像处理,模式识别,投影几何,统计推断,统计学习等学科密切相关,近年来,与计算机图形等学科也发生了很强的联系。 (二)应用: 人类正在进入信息时代,计算机将越来越广泛地进入几乎所有领域。一方面是更多未经计算机专业训练的人也需要应用计算机,而另一方面是计算机的功能越来越强,使用方法越来越复杂。这就使人在进行交谈和通讯时的灵活性与目前在使用计算机时所要求的严格和死板之间产生了尖锐的矛盾。人可通过视觉和听觉,语言与外界交换信息,并且可用不同的方式表示相同的含义,而目前的计算机却要求严格按照各种程序语言来编写程序,只有这样计算机才能运行。为使更多的人能使用复杂的计算机,必须改变过去的那种让人来适应计算机,来死记硬背计算机的使用规则的情况。而是反过来让计算机来适应人的习惯和要求,以人所习惯的方式与人进行信息交换,也就是让计算机具有视觉、听觉和说话等能力。这时计算机必须具有逻辑推理和决策的能力。具有上述能力的计算机就是智能计算机。 计算机视觉就是用各种成象系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释。计算机视觉的最终研究目标就是使计算机能象人那样通过视觉观察和理解世界,具有自主适应环境的能力。要经过长期的努力才能达到的目标。因此,在实现最终目标以前,人们努力的中期目标是建立一种视觉系统,这个系统能依据视觉敏感和反馈的某种程度的智能完成一定的任务。例如,计算机视觉的一个重要应用领域就是自主车辆的视觉导航,目前还没有条件实现象人那样能识别和理解任何环境,完成自主导航的系统。因此,目前人们努力的研究目标是实现在高速公路上具有道路跟踪能力,可避免与前方车辆碰撞的视觉辅助驾驶系统。这里要指出的一点是在计算机视觉系统中计算机起代替人脑的作用,但并不意味着计算机必须按人类视觉的方法完成视觉信息的处理。计算机视觉可以而且应该根据计算机系统的特点来进行视觉信息的处理。但是,人类视觉系统是迄今为止,人们所知道的功能最强大和完善的视觉系统。如在以下的章节中会看到的那样,对人类视觉处理机制的研究将给计算机视觉的研究提供启发和指导。因此,用计算机信息处理的方法研究人类视觉的机理,建立人类视觉的计算理论,也是一个非常重要和信人感兴趣的研究领域。这方面的研究被称为计算视觉。计算视觉可被认为是计算机视觉中的一个研究领域。有不少学科的研究目标与计算机视觉相近或与此有关。这些学科中包括图象处理、模式识别或图象识别、景物分析、图象理解等。由于历史发展或领域本身的特点这些学科互有差别,但又有某种程度的相互重叠。 (三)技术: 有不少学科的研究目标与计算机视觉相近或与此有关。这些学科中包括图象处理、模式识别或图象识别、景物分析、图象理解等。由于历史发展或领域本身的特点这些学科互有差别,但又有某种程度的相互重叠。
人工智能计算机视觉发展分析 计算机视觉是用电脑去识别物体的一种新技术。作为视觉来讲,必须要有眼睛与大脑两部分。计算机视觉的主要组成部分不是“眼睛”,而是“大脑”。 2011年,计算机视觉迎来了最伟大的突破。当年,谷歌人工智能实验室的杰夫·迪恩与斯坦福大学计算机系教授吴恩达合作,他们动用上万台电脑的计算资源,让计算机用深度学习算法在YouTube上观看了一千万段关于猫的视频,最后计算机终于完成了“猫脸识别”。这个项目是谷歌大脑在计算机视觉领域取得的巨大成功。 到了2014年,计算机视觉领域的ImageNet比赛第一次超越了人类肉眼识别图片的准确率——这标志着计算机视觉已经比人眼更加精准,因此具有极大地应用价值。 ImageNet国际挑战赛是计算机视觉领域最著名的比赛,被誉为国际计算机视觉领域的“奥林匹克”。它是2010年由美国斯坦福大学人工智能实验室的李飞飞教授主导推出的。早在2009年,ImageNet对1500万张图片进行了标注,涉及22000个类别的物体,李飞飞她们建立了一个规模空前的数据库。而且,她们公开了整个数据库,免费提供给全世界的人工智能研究团队。有了这个培育计算机大脑的数据库,科研工作者教会了计算机识别物体。 计算机视觉的基本原理
想要实现计算机视觉,首先需要有一个摄像头,然后把拍摄的照片成像在CCD上形成电子照片。这些电子照片是以像素为单位存储在计算机上的。每一个像素都可以看成是三个矩阵元,这些矩阵元给出了像素的RGB数值(每个数值都是整数,取值在0到255之间)。其中,R表示红色,是red的首字母; G表示绿色,是green的首字母;B表示蓝色,是blue的首字母。有了这三种基本颜色,就可以按照不同的权重叠加出千变万化的色彩。 计算机视觉所处理的主要对象就是这个RGB数值,因为每一张照片的像素很多,因此整张照片可以被看成是三个大的矩阵。 计算机视觉的本质,其实就是处理这三个矩阵,然后从这三个矩阵中提取出“特征信息”,比如对于动物的图片,可以提取的特征是“有没有尾巴?”以及“有没有毛?”等。通过对特征信息的提取与判断,可以实现“猫脸识别”或者“人脸识别”。人工智能是通过机器学习的方法,提取不同物体的特征,然后用分类器对各种事物进行分类识别。 计算机视觉的头部公司之一商汤科技与华东师范大学合作,编写了中国第一本人工智能教材《人工智能基础(高中版)》,在书中详细介绍了计算机视觉的算法实现及其基本原理。 计算机视觉有哪些相关企业与落地应用? 计算机视觉领域的应用非常广泛,其主要的落地应用有以下几个大类。
视觉检测技术基础》课程教学大纲 一、课程基本信息 1、课程代码:MI420 2 、课程名称(中/ 英文):视觉检测技术基础/ Foundation of visual measurement technique 3、学时/ 学分:27/1.5 4、先修课程:高等数学,大学物理 5、面向对象:电子信息类专业本科生 6、开课院(系)、教研室:电子信息与电气工程学院仪器系自动检测技术研究所 7、教材、教学参考书:自编讲义 《机器视觉》,贾云得著,科学出版社,2000 《计算机视 觉》,马颂德著,科学出版社,1997 《图像工程》,章毓晋 著,清华大学出版社,2002 二、本课程的性质和任务 《视觉检测基础》是电子信息学院仪器系四年级本科生的选修课,通过本课程的学习,使学生初步了解视觉检测系统的构成及基本原理,每个组成部分如何选择设计,掌握相应的图像处理方法,增加学生的专业知识。通过上机实践提高学生的实际编程能力,增强感性认识,为以后科研、工作中遇到的相关问题提供一个解决的思想,并能实际运用。 三、本课程教学内容和基本要求
1. 基本要求 《视觉检测基础》作为本科生的选修课,应当主要立足于对学生知识的普及,主要讲述计算机视觉系统的组成、设计、处理等方面的基本知识,以课堂讲述为主,讲述中应结合日常生活实际,提高学生的学习兴趣,让学生掌握基本的处理过程及算法,并辅以实验手段进一步增强学生对视觉检测技术的了解,增加感性认识, 2. 教学内容 (1) 课堂教学部分 第一讲计算机视觉概述 一、什么是计算机视觉 二、计算机视觉的应用 三、计算机视觉的研究内容 1 、主要研究内容 2 、与其它学科的关系 第二讲成像原理与系统 一、成像几何基础 1、透视投影 2、正交投影 二、输入设备 1 、镜头 2 、摄像机
(此文档为word格式,可任意修改编辑!)
正文目录 1 计算机视觉:未来之眼,人工智能的前哨 (6) 1.1 计算机视觉:人类的另一双“慧眼” (6) 1.2 巨头入主视觉领域,人工智能成行业新引擎 (8) 1.2.1 国外互联网巨头开启并购狂潮-苹果看“脸”VS谷歌注重运用 (9) 1.2.2国内计算机视觉最看“脸”,投融资如火如荼 (10) 1.3 欧美领跑产业趋势,市场空间巨大 (12) 1.3.1工业自动化需求驱动产业成长 (12) 1.3.2国内需求强劲,未来有望引领产业发展 (13) 2 生产需求和技术进步驱动计算机视觉行业发展 (16) 2.1 硬件是基础,算法是核心 (16) 2.2 计算机技术升级+巨头布局+产业政策“三驾马车”促进产业成长 (18) 2.2.1 图像处理与深度学习技术为行业内生驱动 (18) 2.2.2“机器换人”带来“视觉”设备广泛应用 (19) 2.2.3 政策为产业发展保驾护航 (20) 2.3 性能优越,应用领域广泛 (21) 2.3.1 比人类更敬业的“眼睛” (21) 2.3.2 应用广泛,大有作为 (22) 2.4 多维场景、嵌入式、一体化成为计算机视觉技术趋势 (23) 2.4.1 从二维场景重建迈向三维乃至通用视觉信息系统的构建 (23) 2.4.2 基于嵌入式的产品将取代板卡式产品 (24) 2.4.3 标准化、一体化解决方案也将是计算机视觉的必经之路 (25) 3 应用领域广泛,计算机视觉前景看好 (25) 3.1 智能制造领域迅速扩展,半导体与电子制造占据半壁江山 (25) 3.1.1 半导体电子制造:计算机视觉有效提升自动化水平 (26) 3.1.2 汽车制造:计算机视觉为汽车制造严格把关 (29) 3.1.3 生物医疗:计算机视觉为医疗影像、药品质控装上神秘的眼睛 (30) 3.2 消费应用领域快速扩展,打开未来想象空间 (31) 3.2.1 服务机器人:取代重复劳作,实现场景交互 (31) 3.2.2 无人驾驶:计算机视觉是无人驾驶汽车皇冠上的明珠 (32) 3.2.3 物流:OCR是智能物流的技术核心 (33) 3.2.4 安防监控:计算机视觉透视公共场所,助力智能安防 (33)
图像处理与计算机视觉算法及应用 图像处理与计算机视觉算法及应用(Algorithms for Image Processing and Computer Vision)(第2版)的配套代码。基于OpenCV库-matching code for the book"Algorithms for Image Processing and Computer Vision".Based on OpenCV Library. [上传源码成为会员下载此文件] [成为VIP会员下载此文件] 文件列表(点击判断是否您需要的文件,如果是垃圾请在下面评价投诉): 图像处理与计算机视觉算法及应用(第2版)\Chapter 1\capture.c .......................................\.........\lib0.c .......................................\.........\thr_glh.c .......................................\.........0\angular.c .......................................\..........\check.c .......................................\..........\convert.c .......................................\..........\display.c .......................................\..........\listGreyFiles.c
计算机视觉的现状与发展前景 二十年前,计算机的出现使工作场所出现革命化发展。直到现在,约75%的办公室工作通过计算机和互联网来实现。1990年,大约15%美国家庭拥有了一台计算机,现在增加到70%。计算机视觉(Computer v|si0n)一词最早出现在P.H.Westonl 975 年的论文中。计算机视觉是以视觉处理理论为中心,属于人工智能范畴的一个新领域。它也是以图像处理、模式识别、计算机技术和生理学心理学为基础的信息处理科学中的一个重要分支。计算机视觉技术集数字图像处理、数字信号处理、光学、物理学、几何学、应用数学、模式识别及人工智能等知识于一体,其应用已经涉及到计算几何、计算机图形学、图像处理、机器人学等领域。计算机视觉既是工程领域,也是科学领域中的一个富有挑战性重要研究领域。计算机视觉研究的目标有两个:一个是开发从输入的图像数据自动构造场景描述的图像理解系统,另一个是理解人类视觉,以便有朝一日用机器代替人去作人类难以达到或根本无法达到的工作。当前,计算机视觉也是人工智能及机器人科学中颇为活跃的和卓有成效的热门研究课题。 视觉理解是计算机视觉系统的一个重要处理环节,当前,具有视党反馈功能的机器人已能代替人完成各种复杂的任务,如:产品的自动装配、焊接和检验、生物医学中的自动诊断、遥感照片的自动解释、各种车辆的自动导航等。这种赋予机器以类似人的视觉信息处理能力并为人类自身服务的美好愿望在一定范围或特定任务下已部分地成为现实。今天,计算机视觉的应用已渗透到机器人、天文、地理、医学、化学、物理等宏观及微观世界的各个研究领域。有人预言,计算机视觉是实现智能机器人和第五代计算机的关键因素之一。 计算机视觉是一个复杂的处理过程,景物理解及景物分析是其处理要点之一。用机器实现景物理解必须将输入的图像和预先存入的有关物体结构和环境约束知识进行交互作用,建立明确而有意义的描述理解。这种过程可归结为从一幅图像中提取景物信息,完成某些计算,在不同阶段的理解过程引入相关的先验知识,从而完成理解处理。类似的工作实际上早在50年代就已经开始了。目前,三维物体及景物分析工作的重点在三维物体与自然景物的识Ⅱ与分析上。80年代,在计算机视觉研究中占主导地位的是Mart教授提出的视觉计算理论框架,在这种框架下,Marr认为视觉可看做是三个层次的信息处理过程,而且要从计算理论、算法描述及硬件实现三个方面去实现三个层次的工作。三维物体识别研究自Mart教授创立视觉计算理论后取得了重大进展。这一理论的要点在于把视觉看成一个过程,它从外部世界的图像逐步产生对景物的三个层次的描述,即: a)初始简图——这是基本意义的灰度变动的局部几何性质,以线条勾画出的草图形式出现 b)二维半简图——该图主要描述物体可视面的表面方向和观察点到表面的距离} c)三维模型表示——这是物体形状的全部而清晰的描述。有人认为,Marr教授的视觉计算理论是肘计算机视觉研究的最杰出的贡献。 90年代,Rosenfeld认为应重视三个方面的工作,一是计算的鲁棒性问题,二是主动视觉(active vision)的研究,三是定性视觉的研究(qualitative vision)。有人把视觉定义为“根据tob_id_4068获得的图像理解景物信息的处理过程,而计算机视觉主要是利用计算机提供的手段和方法去完成这一信息处理过程。具体包括:视觉信息的获取图像预处理、分割、描述、识别理解等几步工作。1965年,L.Roberts关于“三维物体的感知”一文提出了几种获取三维信息的基本方法。这些基本方法至今还被计算机视觉研究领域普遍采用。目前,获取视觉信息的主要方法有主动法和被动法两大类,主动法需要对测试物体加入特殊的人造
计算机视觉与图像处理、模式识别、机器学习学科之间的关系 在我的理解里,要实现计算机视觉必须有图像处理的帮助,而图像处理倚仗与模式识别的有效运用,而模式识别是人工智能领域的一个重要分支,人工智能与机器学习密不可分。纵观一切关系,发现计算机视觉的应用服务于机器学习。各个环节缺一不可,相辅相成。 计算机视觉(computer vision),用计算机来模拟人的视觉机理获取和处理信息的能力。就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理,用电脑处理成为更适合人眼观察或传送给仪器检测的图像。计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取‘信息’的人工智能系统。计算机视觉的挑战是要为计算机和机器人开发具有与人类水平相当的视觉能力。机器视觉需要图象信号,纹理和颜色建模,几何处理和推理,以及物体建模。一个有能力的视觉系统应该把所有这些处理都紧密地集成在一起。 图像处理(image processing),用计算机对图像进行分析,以达到所需结果的技术。又称影像处理。基本内容图像处理一般指数字图像处理。数字图像是指用数字摄像机、扫描仪等设备经过采样和数字化得到的一个大的二维数组,该数组的元素称为像素,其值为一整数,称为灰度值。图像处理技术的主要内容包括图像压缩,增强和复原,匹配、描述和识别3个部分。常见的处理有图像数字化、图像编码、图像增强、图像复原、图像分割和图像分析等。图像处理一般指数字图像处理。 模式识别(Pattern Recognition)是指对表征事物或现象的各种形式的(数值的、文字的和逻辑关系的)信息进行处理和分析,以对事物或现象进行描述、辨认、分类和解释的过程,是信息科学和人工智能的重要组成部分。模式识别又常称作模式分类,从处理问题的性质和解决问题的方法等角度,模式识别分为有监督的分类(Supervised Classification)和无监督的分类(Unsupervised Classification)两种。模式还可分成抽象的和具体的两种形式。前者如意识、思想、议论等,属于概念识别研究的范畴,是人工智能的另一研究分支。我们所指的模式识别主要是对语音波形、地震波、心电图、脑电图、图片、照片、文字、符号、生物传感器等对象的具体模式进行辨识和分类。模式识别研究主要集中在两方面,一是研究生物体(包括人)是如何感知对象的,属于认识科学的范畴,二是在给定的任务下,如何用计算机实现模式识别的理论和方法。应用计算机对一组事件或过程进行辨识和分类,所识别的事件或过程可以是文字、声音、图像等具体对象,也可以是状态、程度等抽象对象。这些对象与数字形式的信息相区别,称为模式信息。模式识别与统计学、心理学、语言学、计算机科学、生物学、控制论等都有关系。它与人工智能、图像处理的研究有交叉关系。 机器学习(Machine Learning)是研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。它是人工智能的核心,是使计算机具有智能的根本途径,其应用遍及人工智能的各个领域,它主要使用归纳、综合而不是演绎。机器学习在人工智能的研究中具有十分重要的地位。一个不具有学习能力的智能系统难以称得上是一个真正的智能系统,但是以往的智能系统都普遍缺少学习的能力。随着人工智能的深入发展,这些局限性表现得愈加突出。正是在这种情形下,机器学习逐渐成为人工智能研究的核心之一。它的应用已遍及人工智能的各个分支,如专家系统、自动推理、自然语言理解、模式识别、计算机视觉、智能机器人等领域。机器学习的研究是根据生理学、认知科学等对人类学习机理的了解,建立人类学习过程的计算模型或认识模型,发展各种学习理论和学习方法,研究通用的学习算法并进行理论上的分析,建立面向任务的具有特定应用的学习系统。这些研究目标相互影响相互促进。
计算机视觉和图像理解毕业论文 1.导言 在社会机器人的新兴领域,人类–机器人相互作用通过手势是一个重要的研究课题。人类进行交际的手势中,指向手势的互动与机器人特别有趣。他们开放的直观指示对象和位置的可能性,是特别有用的机器人的命令。指向手势也可结合语音识别指定的口头述和位置参数,还提供了一个明确的输入语音识别时发生歧义。这种类型的一个例子的情况是指向手势引导机器人到一个特定的对象或使用地点。机器人必须能够检测的指向手势和估计目标位置,从而指出,主要的问题出现,有关最近在这一领域的研究视野[1–4,8]。一些最重要的挑战是相关的实时计算,得到的精度和运行在困难的杂乱环境可能遮挡,光照和不同的背景。另一个共同的要求是,指向手势必须认识到,无论规模大小,大指向手势是指进行全臂延伸而小的指向手势只减少前臂和手的运动[ 3,4 ]。 基于这一事实,对于大多数应用程序,它是指目标而不是实际的指向,这是非常重要的,我们制定了一个新的方法,与现有的指向手势识别的方法,也考虑到可能指出目标位置的先验信息。假设的指示语的手势,最常见的类型例如,一个涉及食指指向对象的利益和用户的目光指向同一目标[ 5,6 ] 我们制定我们的方法使用单眼设置高精度跟踪下飞机头部旋转,同时识别手指的手势。这两种输入流被组合在一起推导出指向目标使用的配方是基于Dempster-Shafer理论的证据[7]。一种区别我们的方法来自使用相机基本的方法,多数使用立体声或多摄像机设置。然而,本文的主要容在于基于Dempster-Shafer理论输入端的组合,让该方法在一种或两种输入数据流丢失的情况下能妥善处理(例如手指向的来自遮挡了的可见光);也就是,使用的输入的信号缺乏,实现了令人印象深刻的结果,这是当代概率融合方法不可能得到的来源[1,8]。此外,本文所提出的制定的信念被分配到设置尖锐的目标而不是个人提出的目标。Dempster的组合规则有助于这些信念相结合,而不需要将他们的个人目标的分别观测指出,假如没有明确的建议。在下面的章节中对相关工作(第2节)和提出的方法(第3节)进行了论述。手指的手势识别的简要讨论在第4节而人脸姿势识别在第5节进行了阐述。人脸姿态和手指的融合,是本文的重点,在第6节进行了分析。在模拟环境下的实验结果及其使用的地面真实数据的结果在第7节。本文的结论与讨论在第8节。 2相关的工作 手势识别的研究近年来受到越来越多的关注,也超越了人类–机器人互动的区域,例如在情感计算和身临其境的游戏技术。第一次尝试解决手势解读导致的机械装置,直接测量手或手臂的关节角度和空间位置,所谓的手套设备[ 9 ]。随着计算机视觉技术及快速处理器可用性的最新研究进展,在基于视觉的非接触式接口增加了可穿戴设备,克服阻碍缓解作用的弊端。最近基于视觉的手势识别技术作了较全面的介绍[ 11 ]而且大部分的努力都集中在手势识别[12,6]以及手语翻译[ 13,14 ]。