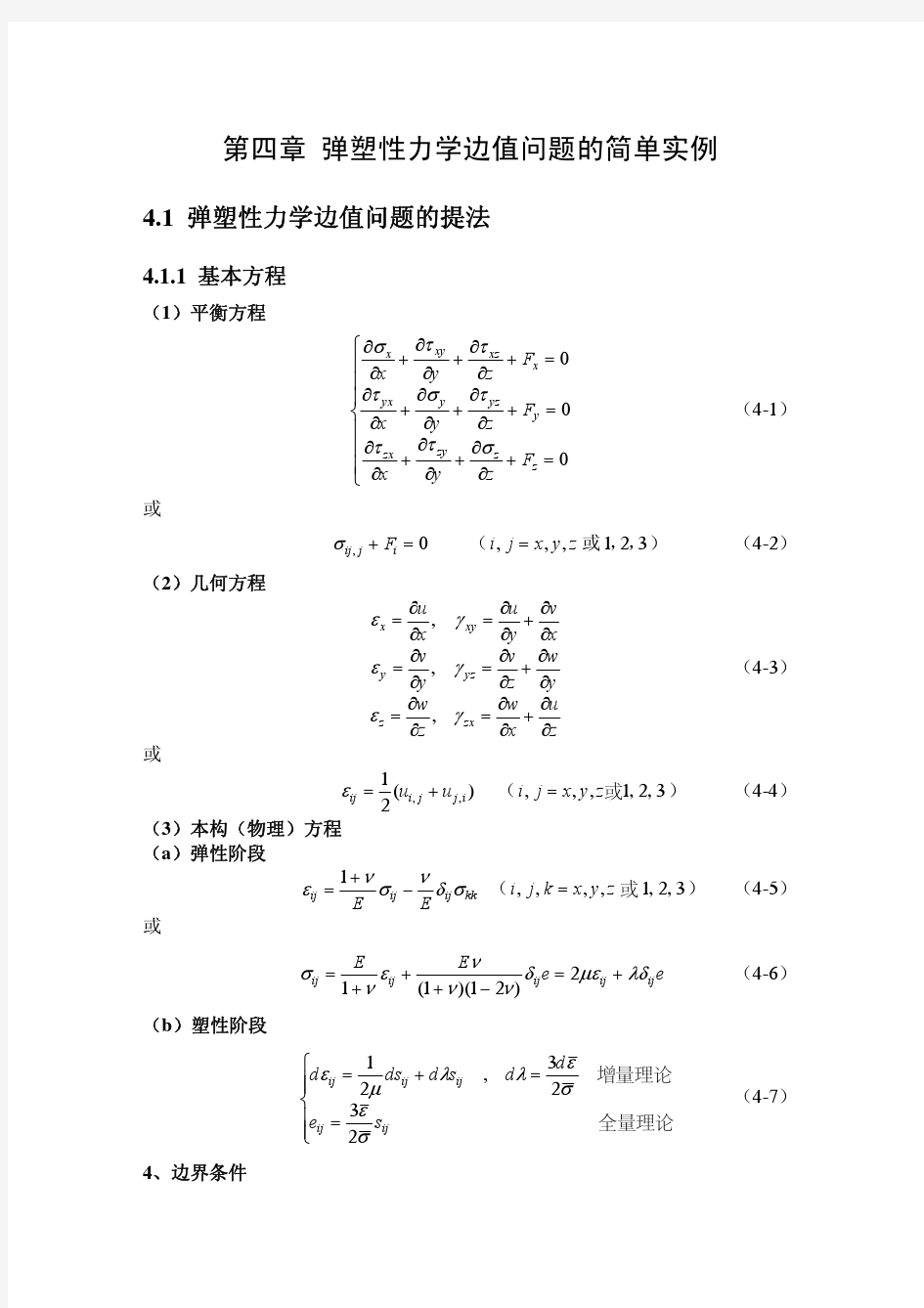
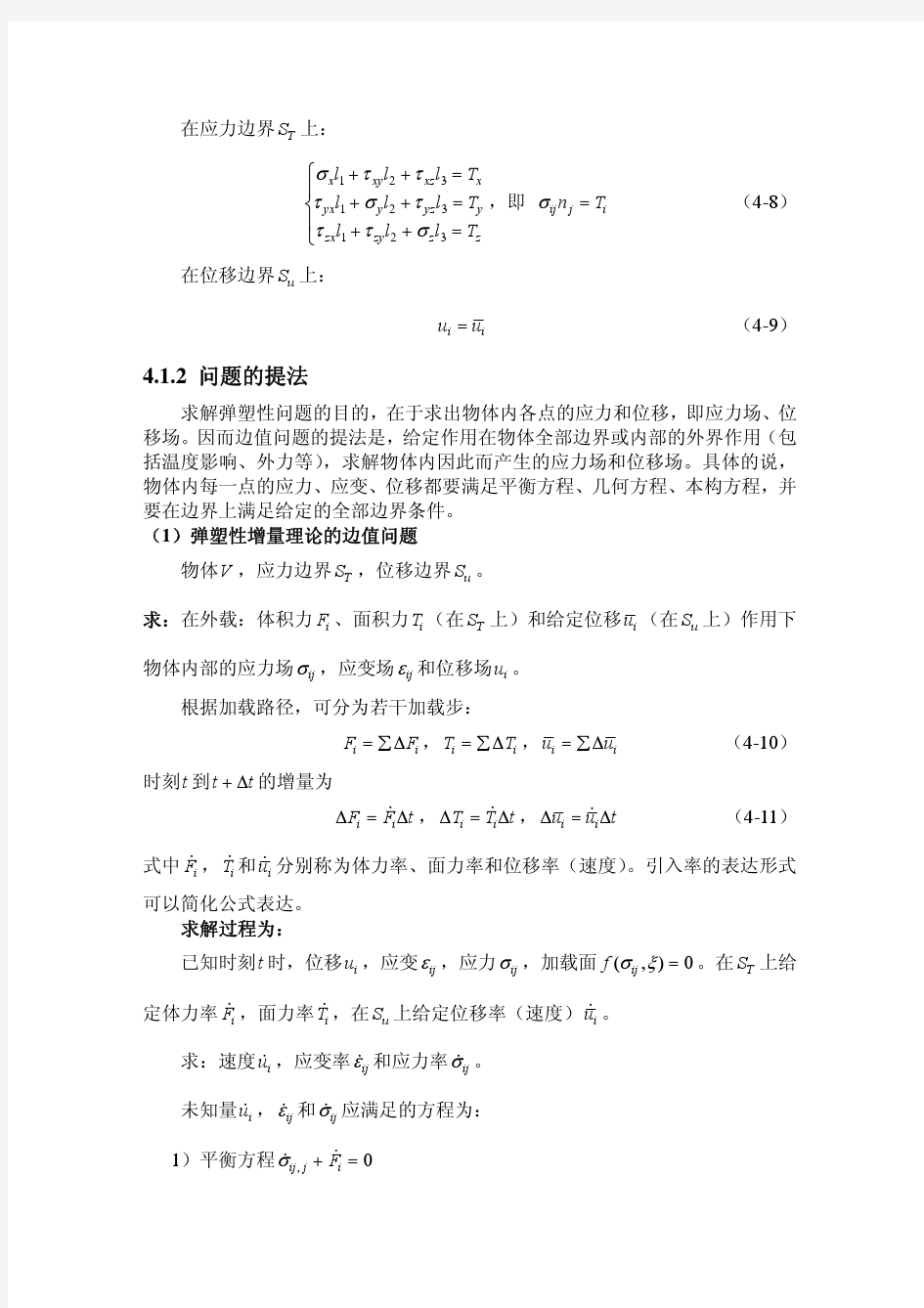
弹塑性力学简答题 第一章 应力 1、 什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2、应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3、对照应力张量ij δ与偏应力张量ij S ,试问:两者之间的关系?两者主方向之间的关系? 相同。110220330 S S S σσσσσσ=+=+=+。 4、为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 5、解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 6、Pie 平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态1+2+3=0,为偏应力状态,且该平面上任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个? 第二章 应变 1、从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入”,即产生不连续。 2、两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 3、应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 4、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程?为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调方程本身是从几何方程中推导出来的。 5、应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多连通体,除满足协调方程方程外,还应补充保证切口处位移单值连续的附加条件。 6、已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变形协调方程吗?为什么?
弹塑性力学 第四章 弹性力学的基本方程与解法 一、线性弹性理论适定问题的基本方程和边界条件 对于在空间占有体积域V 的线弹性体在外加恒定载荷和固定几何约束条件下引起 的小变形问题,若以, , u εσ作为求解变量,则可以建立如下偏微分方程边值问题: 几何方程 ()1,,2ij i j j i u u ε= + ()12?+?u u ε= (1a) 广义胡克定律 ij ijkl kl E σε= :E σ=ε (1b) 平衡方程 ,0ij j i f σ+= ??+=f 0σ V ?∈x (1c) 以上方程均要求在域内各点均满足。 边界条件 u u i i = ?∈x S ui (2a) n t j ji i σ= ?∈x S ti (2b)对于适定问题,即不仅要求保证解存在唯一,而且有较好的稳定性。当载荷或边界条件给定值有微小摄动时,应能保证问题解的变化也是微小的。对于边界条件的提法就有严格的要求。即要求: S S S S S ui ti ui ti U I ==? (2c) 对于各向同性材料,其广义胡克定律可具体写成 σλεδεij kk ij ij G =+2 ()tr 2G λ+I σ=εε (3a) ()11ij ij kk ij E ενσνσδ??=+??? ()()1tr E νν=????I ε1+σ?σ (3b)以上就域内方程来说,一共是对于u ,,σ ε的15个独立分量u i ij ij ,, σε的15个方程。对于边界条件来说,三维问题每点有三个边界条件,而且是在三个正交方向上每个方向有一个边界条件,这个边界条件或者给定位移、或者给定面力。这三个正交
第二章 应力理论和应变理论 2—3.试求图示单元体斜截面上的σ30°和τ30°(应力单位为MPa )并说明使用材料力学求斜截面应力为公式应用于弹性力学的应力计算时,其符号及正负值 应作何修正。 解:在右图示单元体上建立xoy 坐标,则知 σx = -10 σy = -4 τxy = -2 (以上应力符号均按材力的规定) 代入材力有关公式得: 代入弹性力学的有关公式得: 己知 σx = -10 σy = -4 τxy = +2 由以上计算知,材力与弹力在计算某一斜截面上的应力时,所使用的公式是不同的,所得结果剪应力的正负值不同,但都反映了同一客观实事。 2—6. 悬挂的等直杆在自重W 作用下(如图所 示)。材料比重为γ弹性模量为 E ,横截面面积为A 。试求离固定端z 处一点C 的应变εz 与杆的总伸长量Δl 。 解:据题意选点如图所示坐标系xoz ,在距下端(原点)为z 处的c 点取一截面考虑下半段杆的平衡得: c 截面的内力:N z =γ·A ·z ; c 截面上的应力:z z N A z z A A γσγ??===?; 所以离下端为z 处的任意一点c 的线应变εz 为: z z z E E σγε==; 则距下端(原点)为z 的一段杆件在自重作用下,其伸长量为: ()2 2z z z z z z z z y z z l d l d d zd E E E γγ γε=???=??=? = ?= o o o o V ; 显然该杆件的总的伸长量为(也即下端面的位移): ()2 222l l A l l W l l d l E EA EA γγ?????=??= = = o V ;(W=γAl ) 2—9.己知物体内一点的应力张量为:σij =50030080030003008003001100-?? ??+-?? ??--?? 应力单位为kg /cm 2 。 试确定外法线为n i (也即三个方向余弦都相等)的微分斜截面上的总应力n P v 、正应力σn 及剪应力τn 。 解:首先求出该斜截面上全应力n P v 在x 、y 、z 三个方向的三个分量:n '=n x =n y =n z 题图1-3
应用弹塑性力学李同林第四章 这是变形理论。这个理论首先由亨斯基提出,然后由前苏联的伊留申进一步完善。问题提出得更清楚了,并且给出了使用条件。因此,这个理论也被称为亨奇-伊柳辛理论。伊柳欣的变形理论应该满足几个条件: (1)外载荷(包括体力)成比例增加,变形体处于主动变形过程中(即应力强度无中间卸载); (2)材料所用体积不可压缩,采用泊松比μ = 1/2进行计算;(3)材料的应力-应变曲线具有幂强化形式,即 或者 ; 在变形过程中 (4)满足小弹塑性变形的各种条件,塑性变形和弹性变形大小相同。满足上述条件后,变形理论将给出正确的结果。如果负载没有成比例地增加,则外部负载成比例地增加是简单负载的必要条件。这样不仅不能保证物体内部的简单加载状态,而且物体表面也不能满足简单加载条件。体积不可压缩性和泊松比μ=1/2的假设不仅简化了具体计算,而且与实验结果基本一致,因此变形理论的物理关系主要表现为应力挠度和应变挠度之间的关系,这是令人满意的。 法律。 使用幂强化模型可以避免区分弹性区和塑性区,但实际上该模型对不同材料的限制很小,因为各种材料都可以通过选择公式中常数a的指
数m来拟合拉伸曲线。采用小变形条件是因为平衡方程和几何方程是在小变形条件下推导出来的,物理关系也是小变形条件下的关系。伊柳辛不仅明确规定了亨奇变形理论的适用条件,而且证明了简单加载定理。他提出,在小的弹塑性变形条件下,总应变与应力挠度成正比,即: 如果使用主应力,有 等效应变的表达式为: 从这里 因此,Hench-Ilyushin理论的应力-应变关系可以写成如下: 展开等式(4-84): 根据胡克定律(4-33),弹性应变为: 因为塑性应变是总应变和弹性应变之间的差,所以它由方程(4-85)和(1)获得: 公式(4-86)可以缩写为: 实施例4-3众所周知,具有封闭端的薄壁圆筒的平均半径为R,平均直径为D,壁厚为T,圆筒长度为L,并且承受内压P以产生塑性变形。材料是各向同性的。尝试找到: (1)如果忽略弹性应变,周向、轴向和径向应变之比在圆筒壁上的一点处增加; (2)如果材料是不可压缩的,即μ=1/2,圆柱壁上一点的周向、轴向和径向应变总量之比。 因为t/r1是解,所以可以近似地考虑圆柱壁中每个点的径向应力ζr=0。
第十一章 习题答案 11.3使用静力法和机动法求出图示超静定梁的极限载荷。 解1:(1)静力法 首先该超静定梁(a )化为静定结构(b )、(c )。分别求出其弯矩图,然后叠加,得该超静定梁的弯矩图(f ) 在极限情况下 ,A s B s M M M M =-= 设C 点支反力为C R ,则: 12C s R l Pl M -=- 1(2)C s R l l M -= 由上二式得() ()111 42p M l l P l l l * -= - 当P 值达到上述数值时,结构形成破坏机构,故P 为该梁的完全解。 (2)机动法 设破坏机构如图(g ),并设B 点挠度为δ,则: 11,(2)A C l l l θδθδ==- () 1122B A C l l l l δ θθθ=+= - 外力功e W P δ=
内力功() 1 1142i A A B B s l l W M M M l l l θθδ-=+= - 由e i W W =,可得极限载荷上限为 () 1 1142s l l P M l l l *-= - 由于在P *作用下,()s s M M x M -≤≤,故上式所示载荷为完全解的极限载荷。 解2:(1)静力法 先将该超静定梁化为静定梁(b )、(c ),分别作弯矩图,叠加得该超静定梁的弯矩图(f ) 设A 点为坐标原点,此时弯矩方程为: ()()()2 12 B M x R l x q l x =--- 在极限状态时,有 ()0,0s x M M ==- ()11,s x x M x M == 令 () 0dM x dx =得1()B q l x R -= (1) 而21 2 B s R l ql M -=- (2) ()()2 1112 B s R l x q l x M ---= (3) 联立解(1)、(2)、(3)得 2 1 22s s M qM ql l ??=- ??? 解得21122s M q l ?= ?
第四章弹性变形·塑性变形·本构方程 当我们要确定物体变形时其内部的应力分布和变形规律时,单从静力平衡条件去研究是解决不了问题的。因此,弹塑性力学研究的问题大多是静不定问题。要使静不定问题得到解答,就必须从静力平衡、几何变形和物性关系三个方面来进行研究。考虑这三个方面,就可以构成三类方程,即力学方程、几何方程和物性方程。综合求解这三类方程,同时再满足具体问题的边界条件,从理论上讲就可使问题得到解答。 在第二、三两章中,我们已经分别从静力学和几何学两方面研究了受力物体所应满足的各种方程,即平衡微分方程式(2-44)和几何方程式(3-2)等。所以,现在的问题是,必须考虑物体的物性,也即考虑物体变形时应力和应变间的关系。应力应变关系在力学中常称之为本构关系或本构方程。本章将介绍物体产生变形时的弹性和塑性应力应变关系。 大量实验证实,应力和应变之间的关系是相辅相成的,有应力就会有应变,而有应变就会有应力。对于每一种具体的固体材料,在一定条件下,应力和应变之间有着确定的关系,这种关系反映了材料客观固有的特性。下面我们以在材料力学所熟知的典型塑性金属材料低碳钢轴向拉伸试验所得的应力应变曲线(如图4-1所示)为例来说明和总结固体材料产生弹性变形和塑性变形的特点,并由此说明塑性应力应变关系比弹性应力应变关系要复杂的多。 在图4-1中,OA段为比例变形阶段。在这一阶段中,应力和应变之间的关系是线性的,即可用虎克定律来表示: ζ=Eε(4-1) 式中E为弹性模量,在弹性变形过程中,E为常数。A点对应的应力称为比例极限,记作ζP。由A点到B 点,已经不能用线性关系来表示,但变形仍是弹性的。B点对应的应力称为弹性极限,记作ζr。对于许多材料,A点到B点的间距很小,也即ζP与ζr数值非常接近,通常并不加以区分,而均以ζr表示,并认为当应力小于ζr时,应力和应变之间的关系满足式(4-1)。在当应力小于ζr时,逐渐卸去载荷,随着应力的减小,应变也渐渐消失,最终物体变形完全得以恢复。若重新加载则应力应变关系将沿由O到B的原路径重现。BF段称为屈服阶段。C点和D点对应的应力分别称为材料的上屈服极限和下屈服极限。应力到达D点时,材料开始屈服。一般来说,上屈服极限受外界因素的影响较大,如试件截面形状、大小、加载速率等,都对它有影响。因此在实际应用中一般都采用下屈服极限作为材料的屈服极限,并记作ζs。有些材料的屈服流动阶段是很长的,应变值可以达到0.01。由E点开始,材料出现了强化现象,即试件只有在应力增加时,应变才能增加。如果在材料的屈服阶段或强化阶段内卸去载荷,则应力应变不会顺原路径返回,而是沿着一条平行于OA线的MO'''(或HO'、KO'')路径返回。这说明材料虽然产生了塑性变形,但它的弹性性质却并没有变化。如果在点O'''(或O'、O'')重新再加载,则应力应变曲线仍将沿着O'''MFG (或O'HEFG、O''KFG)变化,在M点(或H点、K点)材料重新进入塑性变形阶段。显然,这就相当于提高了材料的屈服极限。经过卸载又加载,使材料的屈服极限升高,塑性降低,增加了材料抵抗变形能力的现象,称为强化(或硬化)。
应用弹塑性力学习题解答 目录 第二章习题答案 (2) 第三章习题答案 (6) 第四章习题答案 (9) 第五章习题答案 (26) 第六章习题答案 (37) 第七章习题答案 (49) 第八章习题答案 (54) 第九章习题答案 (57) 第十章习题答案 (59) 第十一章习题答案 (62)
第二章习题答案 2.6设某点应力张量的分量值已知,求作用在过此点平面上的应力矢量,并求该应力矢量的法向分量。 解该平面的法线方向的方向余弦为 而应力矢量的三个分量满足关系 而法向分量满足关系最后结果为 2.7利用上题结果求应力分量为时,过平面处的应力矢量,及该矢量的法向分量及切向分量。 解求出后,可求出及,再利用关系 可求得。 最终的结果为
2.8已知应力分量为,其特征方程为三次多项式,求。如设法作变换,把该方程变为形式,求以及与的关系。 解求主方向的应力特征方程为 式中:是三个应力不变量,并有公式 代入已知量得 为了使方程变为形式,可令代入,正好项被抵消,并可得关系 代入数据得,, 2.9已知应力分量中,求三个主应力。 解在时容易求得三个应力不变量为, ,特征方程变为 求出三个根,如记,则三个主应力为 记
2.10已知应力分量 ,是材料的屈服极限,求及主应力。 解先求平均应力,再求应力偏张量,, ,,,。由此求得 然后求得,,解出 然后按大小次序排列得到 ,, 2.11已知应力分量中,求三个主应力,以及每个主应力所对应的方向余弦。 解特征方程为记,则其解为,,。对应于的方向余弦,,应满足下列关系 (a) (b) (c) 由(a),(b)式,得,,代入(c)式,得 ,由此求得
弹塑性力学简答题
弹塑性力学简答题 第一章 应力 1、 什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2、应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3、对照应力张量ij δ与偏应力张量ij S ,试问:两者之间的关系?两者主方向之间的关系? 相同。110220330 S S S σσσσσσ=+=+=+。 4、为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 5、解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 6、Pie 平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态1+2+3=0,为偏应力状态,且该平面上任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个? 第二章 应变 1、从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入”,即产生不连续。 2、两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 3、应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 4、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程?为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调方程本身是从几何方程中推导出来的。 5、应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多连通体,除满足协调方程方程外,还应补充保证切口处位移单值连续的附加条件。 6、已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变形协调方程吗?为什么?
一、简答题 1答:(1)如图1所示,理想弹塑性力学模型: e s s e E E σε εεσεσεε=≤==>当当 (2)如图2所示,线性强化弹塑性力学模型: () 1e s s e E E σε εεσσεεεε=≤=+->当当 (3)如图3所示,幂强化力学模型:n A σε= (4)如图4所示,钢塑性力学模型:(a )理想钢塑性: s s εσσεσσ=≤=>当不确定 当 (b )线性强化钢塑性: ()0 /s s s E εσσεσσσσ=≤=->当当 图1理想弹塑性力学模型 图2线性强化弹塑性力学模型 图 3幂强化力学模型 (a ) (b ) 图4钢塑性力学模型 2答:
3答:根据德鲁克公设, ()00,0p p ij ij ij ij ij d d d σσεσε-≥≥。在应力空间中,可将0ij ij σσ-作为向量ij σ与向量0 ij σ之差。由于应力主轴与应变增量主轴是重合的,因此,在应力空间 中应变增量也看作是一个向量。利用向量点积的定义: ()0 0cos 0p p ij ij ij ij ij ij d σ σεσσε?-=-≥,?为两个向量的夹角。由于0ij ij σσ-和p ij ε都是 正值,要使上式成立,?必须为锐角,因此屈服面必须是凸的。 4 答:逆解法就是先假设物体内部的应力分布规律,然后分析它所对应的边界条件,以确定这样的应力分布规律是什么问题的解答。 半逆解法就是针对求解的问题,根据材料力学已知解或弹性体的边界形状和受力情况,假设部分应力为某种形式的函数,从而推断出应力函数,从而用方程和边界条件确定尚未求出的应力分量,或完全确定原来假设的尚未全部定下来的应力。如果能满足弹性力学的全部条件,则这个解就是正确的解答。否则需另外假定,重新求解。 二、计算题 1解:对于a 段有:0N a a a a F A E a a σσεε==?= ,对b 段有:0 N b b b b P F A E b b σσεε-==?= 又a b ?=? 则N bP F a b = + 2解:代入公式,116I =,227I =-,30I = 故117.5MPa σ=,20MPa σ=, 3 1.5MPa σ=- ()0123/3 5.33MPa σσσσ=++= 08.62MPa τ= = 3解:(1)代入公式,110I =,2200I =-,30I = 故主应力:120MPa σ=,20MPa σ=, 310MPa σ=-
第二章 应力理论和应变理论 2—15.如图所示三角形截面水坝材料的比重为γ,水的比重为γ1。己求得应力解为: σx =ax+by ,σy =cx+dy-γy , τxy =-dx-ay ; 试根据直边及斜边上的边界条件,确定常数a 、b 、c 、d 。 解:首先列出OA 、OB 两边的应力边界条件: OA 边:l 1=-1 ;l 2=0 ;T x = γ1y ; T y =0 则σx =-γ1y ; τxy =0 代入:σx =ax+by ;τxy =-dx-ay 并注意此时:x =0 得:b=-γ1;a =0; OB 边:l 1=cos β;l 2=-sin β,T x =T y =0 则:cos sin 0 cos sin 0x xy yx y σβτβτβσβ+=??+=?……………………………… (a ) 将己知条件:σx= -γ1y ;τxy =-dx ; σy =cx+dy-γy 代入(a )式得: ()()()1cos sin 0cos sin 0y dx b dx cx dy y c γβββγβ-+=?? ? --+-=?? L L L L L L L L L L L L L L L L L L 化简(b )式得:d =γ1ctg 2β; 化简(c )式得:c =γctg β-2γ1 ctg 3β 2—17.己知一点处的应力张量为3 1260610010000Pa ??????????? 试求该点的最大主应力及其主方向。 解:由题意知该点处于平面应力状态,且知:σx =12× 103 σy =10×103 τxy =6×103,且该点的主应力可由下式求得: (()() 3 1.2333 3 121010 2217.0831******* 6.082810 4.9172410x y Pa σσσ?++?=±=????=?=±?=? 则显然: 3312317.08310 4.917100Pa Pa σσσ=?=?= σ1 与x 轴正向的夹角为:(按材力公式计算) ()22612 sin 226 12102 cos 2xy x y tg τθθσσθ--?-++ = = ==+=--+ 显然2θ为第Ⅰ象限角:2θ=arctg (+6)=+80.5376° 题图 1-3
应用弹塑性力学习题 解答 Revised on November 25, 2020
应用弹塑性力学习题解答 目录 第二章习题答案 设某点应力张量的分量值已知,求作用在过此点平面上的应力矢量,并求该应力矢量的法向分量。 解该平面的法线方向的方向余弦为 而应力矢量的三个分量满足关系 而法向分量满足关系最后结果为 利用上题结果求应力分量为时,过平面处的应力矢量,及该矢量的法向分量及切向分量。
解求出后,可求出及,再利用关系 可求得。 最终的结果为 已知应力分量为,其特征方程为三次多项式,求。如设法作变换,把该方程变为形式,求以及与的关系。 解求主方向的应力特征方程为 式中:是三个应力不变量,并有公式 代入已知量得 为了使方程变为形式,可令代入,正好项被抵消,并可得关系 代入数据得,, 已知应力分量中,求三个主应力。 解在时容易求得三个应力不变量为, ,特征方程变为 求出三个根,如记,则三个主应力为 记 已知应力分量 ,是材料的屈服极限,求及主应力。 解先求平均应力,再求应力偏张量,,
,,,。由此求得 然后求得,,解出 然后按大小次序排列得到 ,, 已知应力分量中,求三个主应力,以及每个主应力所对应的方向余弦。 解特征方程为记,则其解为,,。对应于的方向余弦,,应满足下列关系 (a) (b) (c) 由(a),(b)式,得,,代入(c)式,得 ,由此求得 对,,代入得 对,,代入得 对,,代入得 当时,证明成立。 解 由,移项之得 证得
第三章习题答案 取为弹性常数,,是用应变不变量表示应力不变量。 解:由,可得, 由,得 物体内部的位移场由坐标的函数给出,为, ,,求点处微单元的应变张量、转动张量和转动矢量。 解:首先求出点的位移梯度张量 将它分解成对称张量和反对称张量之和 转动矢量的分量为 ,, 该点处微单元体的转动角度为 电阻应变计是一种量测物体表面一点沿一定方向相对伸长的装置,同常利用它可以量测得到一点的平面应变状态。如图所示,在一点的3个方向分别粘贴应变片,若测得这3个应变片的相对伸长为,, ,,求该点的主应变和主方向。 解:根据式先求出剪应变。考察方向线元的线应变,将,,,,,代入其中,可得 则主应变有
3. STRAIN 3.1. Deformation and Strain tensor In present chapter we examine the deformation geometry of the deformable solid without regard for the actual forces required to produce it. The most obvious and direct method of describing the motion of a continuum solid is to consider the motion of each and every particle making up the solid. If the relative position of every particle is not changed, there is only rigid moving and rotation, then we may consider it as a rigid displacement. If the relative position of every particle is changed, in the same time the initial shape of the body is distorted, then we called there is a deformation. In the following, we will discuss the deformation of elastic-plastic body. Suppose the distance between two points P o(x o, y o) and P(x,y) is P o P in plane Oxy before deformation. After deformation the two ends of segment P o P moved to P o′(x o′y o′) and P′(x′, y′). Let P o P =s, P o′P′= s ′then the components of vectors s′and s along the x , y axes are: s x′=s x+ s x s y′=s y′+s y The displacement component at point P o is u o =x o′?x o v o =y o′?y o (3.1) Similarly, at point P the displacement component is(Fig.3.1): u =x′– x v =y′– y (3.2) Suppose the displacement u and v are the single-value continuously functions of x and y, then we can expand the displacement at point P in an infinite Taylor series about point P o, that is: u = u o + s x + s y + 0 (s x2, s y2 ) v =v o + s x + s y+ 0(s x2, s y2) (3.3) Because point P is in the neighbourhood of the point P o, therefore the quantity s is sufficiently small, so that we obtain the formula s x =s x′–s x = (x′-x ) – (x o′-x o ) = s x+s y s y =s y′–s y = (y′-y) – (y o′-y o )= s x+ Using the indicial notation and summation convention, these equations
第十一章习题答案 11.3使用静力法和机动法求出图示超静定梁的极限载荷。 解1:( 1)静力法 首先该超静定梁(a )化为静定结构(b )、(c )。分别求出其弯矩图,然后叠 加,得该超静定梁的弯矩图(f ) 在极限情况下 M A M s , M B M s 设C 点支反力为R C ,贝U : R C 2l Pl 1 当P 值达到上述数值时,结构形成破坏机构,故 P 为该梁的完全解。 (2)机动法 设破坏机构如图(g ),并设B 点挠度为,则: C ,(2l l 1) 21 l 1 21 11 外力功W e P (I R c (2l h) M s 由上二式得 M p 41 l 1 2l l 1 l 1 k ——
41 l 内力功 W i M AA M B B —M l 1 21 l 1 由W e W ,可得极限载荷上限为 4l l i l i 2l l i 由于在P 作用下,M s M x M s ,故上式所示载荷为完全解的极限载荷。 解2:( 1)静力法 先将该超静定梁化为静定梁(b )、(c ),分别作弯矩图,叠加得该超静定梁的 弯矩图(f ) 设A 点为坐标原点,此时弯矩方程为: M x R B l x 在极限状态时,有 M s x x-1 ,M x 1 M s 令dM X dx 0 得 q(l X i ) R B 而 R B l iql 2 1 2q (1)、(2)、(3)得 M s 2 l R B l X i 联立解 2qM s i i ql M s M s (1) (2) (3) 解得q ii2 i44 i6 M s l 2
在以上q0值作用下,梁已形成破坏机构,故其解为完全解 (2)机动法如图(g) 设在A、C两点形成塑性铰A B 内力功为 外力功为 由虚功原理W i W 该解与完全解的误差为 3% q 解3:(1)静力法 设坐标原点在C点,此时弯矩方程为: BC 段(0 x L 2)M (x) R c x qx2 1 1 AB段(L 2 x l)M (x)&X - ql x T 2 4 取较大的值,可得q011.66 处,M为极大值,设在BC段,由 dM x dx 得R c q 0 R c q (1) M s M s g2 3M s l W e 2 02q x dx 4q 得:q 12M s q0 11.66^ l2 b ----------- ----------------- H
附录Ⅱ习题解答提示与参考答案 第二章应力理论 2-1 ζn=ζ1l2+ζ2m2,;式中l、m、n为斜截面外法线的方向余弦。 2-2 p=111.5A;ζn=26A;ηn=108.5A 2-3 提示:平面Ax+By+C z+D=0的外法线的方向余弦为:(式中i=1,2,3或A,B,C) 答案: 2-4 略 2-5 (a)ζ1=738.5;ζ2=600;ζ3=-338.5;ηmax=538.5;应力单位为MPa。 (b)ζ1=700;ζ2=600;ζ3=-600;ηmax=650;应力单位为MPa。 2-6 ζ1=3.732η0;ζ2=-0.268η0;α=15o。 2-7 (材料力学解) 应力单位为MPa。 (弹塑性力学解) 应力单位为MPa。 2-8 ζ1=107.3a;ζ2=44.1a;ζ3=-91.4a; ζ1主方向:(±0.314,0.900,0.305); ζ2主方向:(±0.948,±0.282,±0.146); ζ3主方向:(0.048,±0.337,0.940)。 2-9 ;ζ2=0;ζ3=-ζ1。 2-10、2-11 略 2-12 (1)略;(2)ζ8=ζm=5.333MPa;η8=8.654MPa。 2-13 p8=59.5;ζ8=25.0a;η8=54.1a。 2-14 上式中S为静矩。材料力学解不满足平衡微分方程和边界条件。
2-15 ,Q为梁横截面上的剪力。提示:利用平衡微分方程求解。2-16 ζ1=17.083×103Pa;ζ2=4.917×103Pa;ζ3=0,?=40o16′。2-17 略2-18 2。2-19 提示:将三个主方向的三组方向余弦分别两两一组代人式(2-12)证之。2-20 。2-21 在AA′上:ζx=-γy,ηxy=0;在AB上:ηxy=0,ζy=-γh;在BB′上:l1=cosα,l2=-sinα,l3=0;则应力分量满足关系式:2-22 。2-23 。2-24 ηzx=-ζz tanα;ζx=ζz tan2α。2-25 在x=-ytanα处,在x=ytanβ处: 2-26 A=0;B=-ρ1g;C=ρgcotβ-2ρ1gcot3β;。 2-27 (1)ζ1=99.6A;ζ2=58.6A;ζ3=-138.2A;ηmax=118.9A。 (2)ζ1=99.6A;ζ2=58.6A;ζ3=-138.2A;ηmax=118.9A。
应用弹塑性力学习题解 答 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
应用弹塑性力学习题解答 目录 第二章习题答案 设某点应力张量的分量值已知,求作用在过此点平面上的应力矢量,并求该应力矢量的法向分量。 解该平面的法线方向的方向余弦为 而应力矢量的三个分量满足关系 而法向分量满足关系最后结果为 利用上题结果求应力分量为时,过平面处的应力矢量,及该矢量的法向分量及切向分量。
解求出后,可求出及,再利用关系 可求得。 最终的结果为 已知应力分量为,其特征方程为三次多项式,求。如设法作变换,把该方程变为形式,求以及与的关系。 解求主方向的应力特征方程为 式中:是三个应力不变量,并有公式 代入已知量得 为了使方程变为形式,可令代入,正好项被抵消,并可得关系 代入数据得,, 已知应力分量中,求三个主应力。 解在时容易求得三个应力不变量为, ,特征方程变为 求出三个根,如记,则三个主应力为 记 已知应力分量 ,是材料的屈服极限,求及主应力。 解先求平均应力,再求应力偏张量,,
,,,。由此求得 然后求得,,解出 然后按大小次序排列得到 ,, 已知应力分量中,求三个主应力,以及每个主应力所对应的方向余弦。 解特征方程为记,则其解为,,。对应于的方向余弦,,应满足下列关系 (a) (b) (c) 由(a),(b)式,得,,代入(c)式,得 ,由此求得 对,,代入得 对,,代入得 对,,代入得 当时,证明成立。 解 由,移项之得 证得
第三章习题答案 取为弹性常数,,是用应变不变量表示应力不变量。 解:由,可得, 由,得 物体内部的位移场由坐标的函数给出,为, ,,求点处微单元的应变张量、转动张量和转动矢量。 解:首先求出点的位移梯度张量 将它分解成对称张量和反对称张量之和 转动矢量的分量为 ,, 该点处微单元体的转动角度为 电阻应变计是一种量测物体表面一点沿一定方向相对伸长的装置,同常利用它可以量测得到一点的平面应变状态。如图所示,在一点的3个方向分别粘贴应变片,若测得这3个应变片的相对伸长为,, ,,求该点的主应变和主方向。 解:根据式先求出剪应变。考察方向线元的线应变,将,,,,,代入其中,可得 则主应变有
弹塑性力学简答题 第一章应力 1、什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2、应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3、对照应力张量 ij 与偏应力张量ij S,试问:两者之间的关系?两者主方向之间的关系? 相同。110 220 330 S S S 。 4、为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 5、解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量 x 、y、xy不是互相独立的,而是相关,否则导致位移不单值,不连续。 6、Pie平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态1+2+3=0,为偏应力状态,且该平面上任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个? 第二章应变 1、从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相 互“嵌入”,即产生不连续。 2、两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题, 它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 3、应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量 x 、y、xy不是互相独立的,而是相关,否则导致位移不单值,不连续。 4、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程? 为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调方程本身是从几何方程中 推导出来的。 5、应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多连通体,除满足协调方程 方程外,还应补充保证切口处位移单值连续的附加条件。 6、已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变形协调方程吗?为什么?
第四章 4.1 利用式(4.2a )和各向同性线弹性材料的应力-应变关系,证明平衡方程(4.1b )能写成下列式子(这些方 程即所谓的Navier 方程): 证明:式(4.2a ) j i i j j i ij ,,,)(21μμμε=+= 式(4.1b )σji,j +F i =0 由各向同性线弹性材料应力应变关系可知 ) 出入证得结果与题目结论有(整理得:带入得查表及,将**!*!!!!!****0 2120 2120212212212212)1.4() 21(3)1(2132,,i ,,i ,,,i ,,i ,,i ,,i =+-+=+-+?=+∴-+=-+=-+=∴-+=-+=++ =G F F G G F G G G G G G G G G K K G i i jj jj i i jj jj i j ji i jj jj i kk jj ji j kk jj j ji ji kk j ji ji ji kk ji ji μνν μμν νμσμν νμμννμδμννμσδμν νμσννεδεννεσ 4.5 (金晶)对于应变能密度函数如式(4.93)定义那样, ,,10 12i i jj j ji F G μμν++=-
1 2 ij ij W σε=,证明弹性体总的应变能等于由表面拉力i T 和体力i F 由无应力状态到应力ij σ和应变ij ε的平衡状态中所产生的位移 i u 上所做的功的一半。 证明: 由公式(4.86和4.85)得: ()ij ij ij ij W d εεσε=? , 0 ()ij ij ij ij d σσεσΩ=? 当材料是线弹性的时候,应力—应变的一般形式可以写成: ij ijkl kl C σε= 所以得出(4.93)1 2 ij ij W σε= 1 2 ij ij W σε∴=Ω=, ()2ij ij W dV WdV dV σε+Ω==??? i i i i ij ij A V V Tu dA Fu dV dV σε+=?? ? 1 2 ij ij i i i i A V WdV dV T u dA Fu dV σε∴==+???? 4.9 无初始应力和初始应变的材料单元受到一个组合加载历史,产生下列τσ,空间中的连续直线路径[单位为Mpa (拉应力σ,剪应力τ)]: 路径1:(0,0)至(0,68.95) 路径2:(0,68.95)至(206.85,68.95) 路径3:(206.85,68.95)至(206.85,-68.95) 路径4:(206.85,-68.95)至(0,0) 材料单元假设为各向同性非线性弹性,其余能密度Ω为)(2 33 2J J a +=Ω,其中a 为材料常数。简单拉伸下的应力-应变关系为59)1000 ( 10σ ε=,其中σ的单 位为Mpa 。 (a )给出在路径3末端的轴向伸长和剪切应变; (b )求出路径1和2末端所有正应变和剪切应变分量; (e )将路径1转化为主应力空间中的路径,利用以主应力表达的应力-应变