第4章超静定结构
§4.1 超静定结构特性
●由于多余约束的存在产生的影响
1. 内力状态单由平衡条件不能惟一确定,必须同时考虑变形条件。
2. 具有较强的防护能力,抵抗突然破坏。
3. 内力分布范围广,分布较静定结构均匀,内力峰值也小。
4. 结构刚度和稳定性都有所提高。
●各杆刚度改变对内力的影响
1. 荷载作用下内力分布与各杆刚度比值有关,与其绝对值无关。
2. 计算内力时,允许采用相对刚度。
3. 设计结构断面时,需要经过一个试算过程。
4. 可通过改变杆件刚度达到调整内力状态目的。
●温度和沉陷等变形因素的影响
1. 在超静定结构中,支座移动、温度改变、材料收缩、制造误差等因素都可以引起内力,即在无荷载下产生自内力。
2. 由上述因素引起的自内力,一般与各杆刚度的绝对值成正比。不应盲目增大结构截面尺寸,以期提高结构抵抗能力。
3. 预应力结构是主动利用自内力调节超静定结构内力的典型范例。
§4.2 力法原理
●计算超静定结构的最基本方法
超静定结构是具有多余联系(约束)的静定结构,其反力和内力(归根结底是内力)不能或不能全部根据静力平衡条件确定。力法计算超静定结构的过程一般是在去掉多余联系的静定基本结构上进行,并选取多余力(也称赘余力)为基本未知量(其个数等于原结构的超静定次数)。根据基本体系应与原结构变形相同的位移条件建立方程,求解多余力后,原结构就转化为在荷载和多余力共同作用下的静定基本结构的计算问题。这里,基本体系起了从超静定到静定、从静定再到超静定的过渡作用,即把未知的超静定问题转换成已知的静定问题来解决。
●基本结构的选择(解题技巧)
1. 通常选取静定结构;也可根据需要采用比原结构超静定次数低的、内力已知的超静定结构;甚至可取几何可变(但能维持平衡)的特殊基本结构。
2. 根据结构特点灵活选取,使力法方程中尽可能多的副系数δij = 0。
3. 应选易于绘制弯矩图或使弯矩图限于局部、并且便于图乘计算的基本结构。
4. 对称取基本结构;或利用对称性取半结构;或求弹性中心;以减少未知力数目,并使力法方程解耦。
●力法典型方程
典型方程可写成矩阵形式:
δX+ Δ = C (4.2.1) 式中,δ为柔度系数矩阵(对称方阵);X为多余未知力列阵;Δ为自由项列阵(外因作用下的广义位移列阵);C为原结构多余联系处的已知位移(不一定为零)列阵。
●力法的解题步骤
1. 确定基本未知量,合理选取基本结构。
2. 根据多余联系处的位移(变形)协调条件,建立力法方程。
3. 计算力法方程中的柔度系数和自由项。
绘制基本结构的i M 图、M P 图(或写出弯矩方程),并图乘(或积分)。其它外因下的自由项由位移公式求得。对于桁架结构,只考虑相应的轴力图。对于超静定拱,求方程系数、自由项时图乘法不再适用,位移系数计算时往往要考虑轴力或曲率的影响。
4. 解力法方程(线性代数方程组),求出多余未知力。
5. 绘制超静定结构的内力图。
对于受弯结构,一般先绘M 图,再按M 、Q 、N 的顺序依次作图。可利用已有的i M 图、
P M 图,根据叠加公式∑+=P i i M X M M 绘制;也可将已求的多余力和荷载加在基本结
构上,按静定结构方法计算绘制最后内力图。桁架结构按叠加公式∑+=
P i i
N X N
N 标
注轴力图。
6. 内力计算校核(包括平衡条件校核和变形条件校核)。
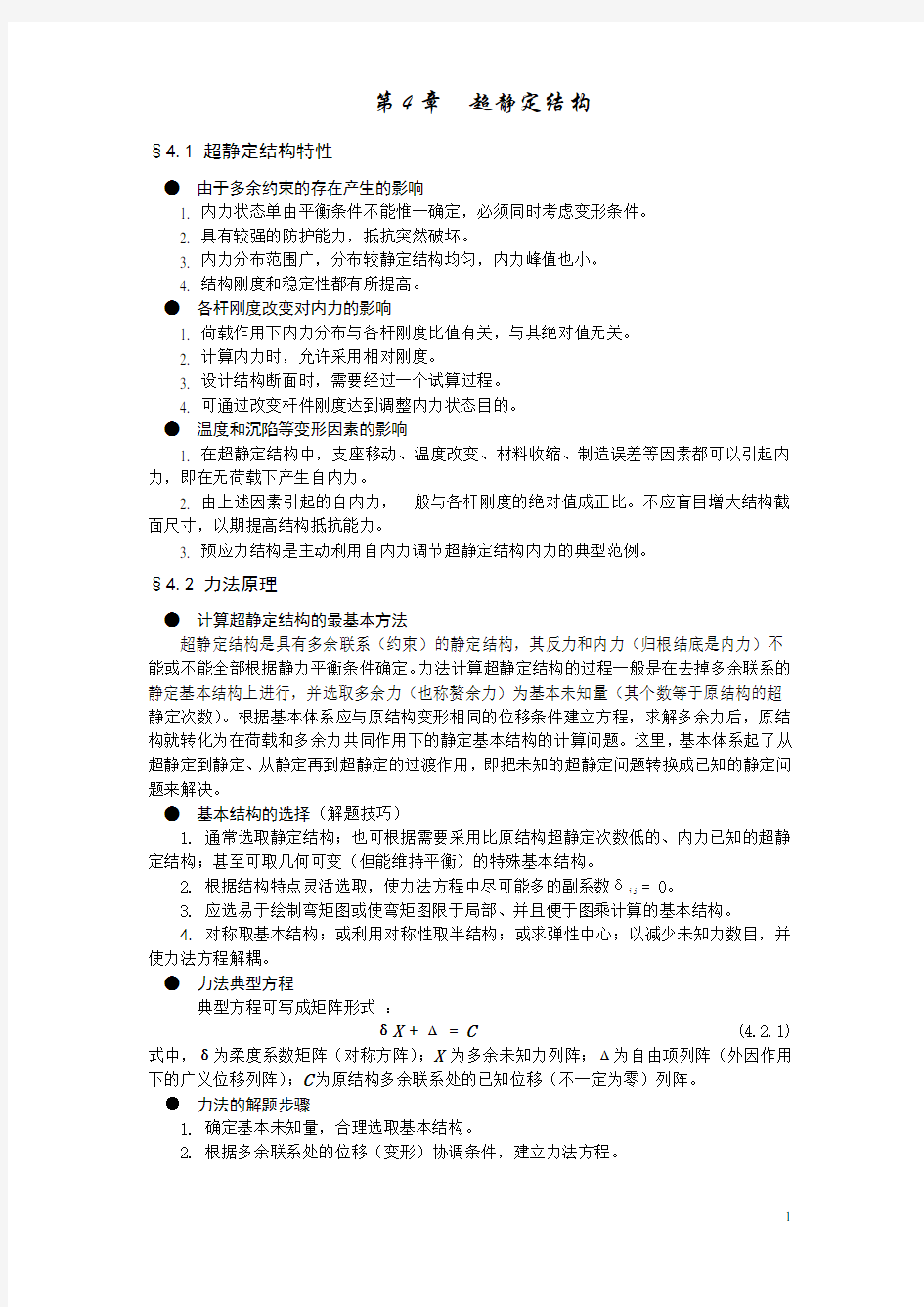
例1 图4.2.1a 所示连续梁为28a 号工字钢,I=7114cm 4
,E=210 GPa ,l =10 m ,P=50 kN 。若欲使梁内最大正、负弯矩的绝对值相等,问应将中间支座升高或降低多少?
解:选取如图4.2.1b 所示基本体系,依题意有2/4/M Pl M -=,得6/Pl M =,作M 图(图4.2.1c )。
求中间支座B 处位移,取如图4.2.1d 所示的基本结构,作1M 图。图乘得
)
(0232.0)10711410210144/(10501444421362128633
↓=?????==??? ?????+???-=?-m EI
Pl l l Pl l Pl l EI By
●
形),在反对称荷载作用下只产生反对称分布的内力(变形)。利用对称性可选取半结构计算,根据内力和变形特点,在对称轴处加上相应的支座约束,可求得原结构的解,并减少计算量。对称结构受任意荷载作用时,也可将荷载分解成对称和反对称两组,分别利用对称性计算后,叠加所得结果即可得到原问题的解答。
例2 计算图4.2.2a 所示刚架,绘出弯矩图,并求出C 点的竖向位移。E=常数。 解:该结构内部12次超静定(数框格),而且对称,支座本不对称,但结构外部静定,易求得支座反力H A =0。因此,对称结构在对称力作用下(对称轴为CD 线,图4.2.2b ),取半结构计算(图4.2.2c )。与原结构相比,A 点可以上下位移,但C 点约束,其相对位移是一致的。若将A 处的4P 力分组为作用在A 和A ’点的对称与反对称力,对称时仅AA ’杆受轴向压力2P,反对称时再取半结构计算(图 4.2.2d )。同样处理,还可以再取半结构(图4.2.2e )。此时,原结构的1/8结构已降为一次超静定,选基本体系(图4.2.2f ),作1M 图和P M 图(图4.2.2g 、h ),图乘得
4
22124
72223222213
13
11Pa
a a Pa EI a a a a a a a EI P -
=???-=?=
??+????=δ 则 P a
Pa X P
76
72443311
11=?=?-
=δ
由部分M 图按对称或反对称情况复制成原结构M 图(图4.2.2b )。
求原结构C 点竖直向下位移,就是求C 点相对于A 点的竖直向下位移,或者说是A 点相对于C 点的竖直向上位移。因此既可以在原结构的C 点处,也可以在原结构的某一基本结构(图4.2.2f )的A 点上加单位力作M 图(图4.2.2i )与相应的部分M 图(图4.2.2j )图
● 只要已知超静定结构的内力分布,即可从任一基本体系出发,按该静定结构受多种外因作用求位移的方法,求得超静定结构在某外因下的位移。因此,基本体系的选取直接关系到求位移的计算量。以图乘法求位移为例,选取一个便于计算的基本结构,作虚弯矩图(即M 图);将原超静定结构的最后M 图作为基本结构求位移的实际“荷载弯矩图”;M 与M 图乘得超静定结构位移,但该位移仅在原结构受荷载外因作用时才是正确的。因为在温度变化和支座移动等外因作用时,超静定结构位移既要考虑内力(弯矩)产生的位移,也要考虑静定基本结构因温度变化和支座移动等产生的位移。因此,超静定平面结构位移计算的一般公式为:
c R ds h
M
t ds N t GA Qds Q k EA Nds N EI Mds M ∑∑?∑?∑?∑?∑?
-?++++=?αα (4.2.2) 式中,M 、N 、Q 为超静定结构在各种外因作用下的实际内力;M 、N 、Q 为基本结构在单位力作用下的虚内力;R 为基本结构在单位力作用下的虚反力;c 为支座的实际位移。
§4.3 位移法与渐近法
● 基本未知量与基本体系
1. 位移法的基本未知量为结构结点处独立的角位移和线位移,与超静定次数无关,因
此位移法也可解静定结构。杆件自由端和滑动支承端的线位移及铰结端的角位移不作为基本
未知量;组合结点(半铰)处的角位移应视为基本未知量;刚性梁结点处转角视为已知位移。待求结构中若有静定部分,其内力可用平衡方程直接获得,其位移不作为基本未知量考虑;但弹性支座处位移要作为基本未知量。为了减少基本未知量,受弯杆件一般不考虑轴向变形。
2. 在原结构刚结点上附加刚臂,在独立线位移方向上附加链杆,将结构离散成具有已知形常数和载常数的单根固端杆件处理,从而形成更高次超静定的位移法基本体系,附加约束数同基本未知量数。要恢复原结构,附加约束上的总反力应等于零,据此建立位移法典型方程,求出结点位移(称典型方程法或基本结构法)。 ● 转角位移方程
用位移法计算超静定刚架时,每根杆件均可看作是单根超静定梁,因此需要计算这种梁在杆端A 、B 发生的转角φA 、φB 和侧移ΔAB (两端在垂直于杆轴方向上的相对线位移)以及在荷载等外因作用下的杆端弯矩和剪力(载常数)。所谓转角位移方程就是求杆端弯矩的一般计算公式,由力法导出等截面杆转角位移方程中的形常数(由位移引起的杆端内力)和载常数。结构较简单时,可逐杆写出转角位移方程,以结点或结构部分为对象,建立与各结点独立位移相应的广义力平衡条件,得到位移法方程,解决位移计算(称平衡方程法)。 ● 位移法典型方程
1. 一般形式:
∑=+0iP j
ij
R Z
r ( i =1,2,…,n ; j =1,2,…k. ) (4.3.1)
式中,n 为附加约束数,k 为基本未知量数,r ij 为反力系数(刚度系数),R iP 为自由项。
2. 矩阵形式: K Δ + R = 0 (4.
3.2) 式中,K 为结构刚度矩阵(对称矩阵),Δ为未知位移列阵,R 为广义荷载反力列阵。
位移法方程实际上是每个刚结点处与转角相应的力矩平衡方程和与独立结点线位移相应的截面平衡方程(力的投影方程),平衡方程的个数与基本未知量的个数彼此相等,可解出全部基本未知量。 ● 位移法的解题步骤
1. 确定基本未知量,附加约束形成基本结构。
2. 利用基本体系建立位移法典型方程。
3. 由基本结构的i M 图、M P 图求系数和自由项。
4. 解位移法方程,求结点位移 Z i .
5. 按 ∑+=
P i
i
M Z
M M 叠加得最后弯矩图。
6. 用平衡条件校核内力图。
例3 用位移法计算如图4.3.1a 所示刚架,绘制弯矩图。E=常数。
解:取基本体系如图4.3.1b 。设E 结点转角为Z 1,DF 杆水平位移为Z 2,作1M 图、2
M 图、M P 图(图4.3.1c 、d 、e )。计算系数和自由项: l i r r i i i i r /6,16466211211-===++=
ql R R l
i
l i l i l i r P P 8
3
,0,18123321222222-===++=
代入位移法方程,得
???
????=-+-=-
083
186********ql l
i Z l i Z l i
iZ 解得 i
ql Z i
ql Z 42,
1122
22
1==
由 P M Z M Z M M ++=2211 ,作M 图(图4.3.1f)。
● 位移法的解题技巧
1. 利用结构对称性,取半结构计算。
2. 与力法结合,简化计算(联合法与混合法)。 例4 试举例说明联合法与混合法的应用。
解:⑴联合法应用 分析如图4.3.2a 所示一般荷载作用下的对称刚架。 不论用力法或位移法都有六个基本未知量。若将荷载按对称和反对称分组,在正对称情况下取半结构(图4.3.2b ),无侧移刚架宜用位移法计算,只有两个基本未知量(用力法则有四个多余力)。在反对称情况下,取半结构如图4.3.2c ,用位移法有四个基本未知量(两个结点角位移和两个结点线位移),若用力法,则仅有两个基本未知量(去掉两个链杆支座,代以多余未知力)。因此,将力法和位移法联合对不同的半结构求解,都只有两个未知量,⑵混合法应用 计算图4.3.3a 所示刚架,绘制M 图,E =常数。
对结构上半部用力法:去掉F 链杆支座约束,代以未知力X 1;对结构下部用位移法:在C 结点加刚臂,设C 转角为Z 2;在这类基本结构上作1M 图、2M 图、P M 图(图4.3.3b 、c 、d )。计算系数、自由项得
)
(16,12816214414,21122233256)4444324421(12112212211m kN R EI
EI r EI EI EI EI r EI EI P P
?-=-=????-=?-===++==??+????=
δδ 代入混合法典型方程
?
??
=++=?++0022221211212111P P R Z r X r Z X δδ
得 ???
??
?
?
=-+=--016211
40128432562121Z EI X EI Z X EI 解得
Z kN X 758.1160,
582.114421==
==
由 1. 力矩分配法
20世纪30年代出现的力矩分配法(也称“林氏法” )以及随后出现的无剪力分配法、迭代法等都以位移法为基础,其共同特点是避免组成和解算典型方程,而以逐次渐近的方法来计算杆端弯矩,其结果的精度随计算轮次的增多而提高,最后收敛于精确解。
渐近法的物理概念生动形象,重复相同步骤,易于掌握。由于该法可不经过计算结点位移而直接求得杆端弯矩,在电脑普及的今天,仍在结构设计中被广泛使用,适用于手算连续
梁和无侧移刚架。
力矩分配法的实施步骤:①准备工作 求各杆端的转动刚度(劲度系数)、分配系数和传递系数。②固定结点 计算各杆的固端弯矩,得出各结点的不平衡力矩。③放松结点 将不平衡力矩反号乘分配系数,分配给汇交于该结点的各杆近端,再乘传递系数传至远端。多结点时,轮流放松各结点,重复以上步骤,直至各结点的传递弯矩小到可以忽略为止。④计算结果 叠加固端弯矩、历次分配弯矩和传递弯矩,得出各杆端最后弯矩后,逐杆绘制弯矩图。
2. 无剪力分配法
适用于有侧移刚架(其中只包含无侧移杆和剪力静定杆)的特殊的力矩分配法。对于单跨对称刚架,取荷载反对称时的半刚架为基本结构,可用无剪力分配法计算。也可推广应用
到符合倍数关系的多跨刚架[6]
。
无剪力分配法实施要点:①横梁按近端固定、远端铰支的单跨梁计算固端弯矩,近端转动刚度S=3i ,传递系数C=0。②立柱视为上端滑动、下端固定的单跨梁,计算在柱顶以上各层所有水平荷载作用下的固端弯矩,近端转动刚度S= i , 传递系数 C=-1 。③力矩的分配与传递同一般力矩分配法。
§4.4 矩阵位移法及程序功能扩展
● 基本特点
⑴ 位移法(原理)+ 矩阵(表达)+ 电算(程序),也称“杆系有限元法”。 ⑵ 以结构结点位移为基本未知量,以平衡方程(刚度方程)为基本方程。 ⑶ 主要解题步骤包括:单元分析(“拆”或“离散”)、整体分析(“搭”或“集合”)。 ● 局部与整体坐标下的单刚
平面自由单元局部坐标系中的单元刚度矩阵(考虑轴向变形的弯曲单元,对称):
[]
??
????
????
??
??????????
???????
?-----
---
=l EI l
EI l
EI l EI l EI l EI l EI l EI l EA l EA l
EI l EI l EI l EI l EI l EI l EI l EI l EA l EA
k e 460
260612061200000260
460612061200
0002
2
2
3232
2
2323 (4.4.1)
整体坐标系中的单元刚度矩阵: [][][][]T k T k e
T
e
= (4.4.2)
式中,[]T 为单元坐标转换矩阵,即
[]?
?????
?????????
?????--=10
00cos sin 0000sin cos 0000001000000cos sin 0000sin cos αα
αααααα
T (4.4.3)
● 结构刚度矩阵(总刚)
在整体坐标下集成结构原始刚度矩阵[K]时,由单刚[k]e
扩阶后,子块对号入座叠加而成(直接刚度法)。集成时,依定位向量对约束条件先作处理,称“先处理法”。对集成的原始总刚引入支承条件进行修改的称“后处理法”。 ● 等效结点荷载
综合结点荷载列阵 : {}{}{}E D P P P += (4.4.4) 式中,{}D P 是直接结点荷载列阵;{}E P 是等效结点荷载列阵,由各单元等效结点荷载列阵
{}[]{}e
F T e E F T P -=在相应结点上叠加而成;{}e
F F 为单元在非结点荷载作用下局部坐标
系中的固端力列阵。 ● 计算步骤
1. 单元和结点编码,建立局部和整体坐标系(与程序设计一致)。
2. 求局部和整体坐标系中的单刚。
局部单元刚度方程 {}[]{}e
e
e
k F
?= ,整体单元刚度方程 {}
[]{}e
e
e
k F ?= 。
3. 集成结构原始总刚。子块对号入座叠加而成(直接刚度法)。在集成时,依定位向量对约束条件先作处理,称先处理法。
4. 求综合结点荷载列阵。
5. 引入支承条件(后处理法,单刚统一,程序通用性强),用置大数法或划零置一法修改结构原始总刚。
6. 解结构刚度方程[K]{Δ}={P},求结点位移{Δ}。
7. 计算各单元的杆端内力{}
e
F 。若单元在非结点荷载作用下,单元杆端力还应叠加相
应的固端力{}e
F
F 。即 {}{}{}{}e
F
e
e
e
F k F +?=,分两步实现:
①回代,{}[]{}{}e
F
e
e
F k F +?= ;②变换,{}[]{}e
e
F T F =。
除了第一步编码、准备输入文件外,其余由计算机程序(SDAP )按上述步骤自动运行。输入文件中,头五行写标题(也可空行);第六行填材料弹性模量、杆件单元数、结点数、支承条件数、荷载情况数、始端单铰单元数和功能选择指标IFRG 。由平面刚架静力分析程序改写扩展而成的SDAP 小程序包已具备静动力多种计算功能。 ● 程序功能扩展
计算机程序设计可以从平面刚架静力分析程序起步[4]
,根据需要不断扩充其功能。本程序SDAP 按模块设计共设置29个子程序,其名称及功能见框图说明。主程序起组织整个计算的作用,通过调用功能单一的子程序完成各项具体计算。从主程序的说明部分开始到主程序的END 语句结束(自动停机)。主程序读入控制指标IFRG 值控制四种主要计算功能:为0时作梁、桁架、刚架、拱及其组合或混合平面结构的静力分析;为1时计算交叉梁系,以考虑某些结构的面外特性;为2时进行平面弹性稳定分析;为3时进行平面结构动力特性分析。源程序框图如下:
图4.4.1源程序主框图
求广义特征值问题Kφ=λMφ最小几个特征值和对应特征向量的子空间迭代法[12],包括四个主要步骤:总刚的分解,子空间迭代,Sturm序列校核及误差估计(图4.4.2)。对于MCK型特征问题,拟改用逆兰索斯法。
图 4.4.2 源程序子框图1
图 4.4.3 源程序子框图2
图4.4.4 源程序子框图3
图4.4.5 源程序子框图4
图4.4.6 源程序子框图5
●计算实例
例1侧向风载下多层刚架分析。图 4.4.7a所示平面刚架,杆件截面为矩形,柱A=0.16m2,I=2.133×10-3m4;梁A=0.28m2,I=0.01143m4。E=常数,取1计。风荷载化为均布风压作用于刚架一侧。准备数据时,注意程序规定的荷载类型和方向(均以整体坐标x、y方向为准)。该程序适用于分析高层多跨钢筋混凝土刚架,得到各梁柱的杆端力后,按简支梁叠加法作M图,进而作Q图、N图。
The Terminal Forces(杆端力)
Member N(st) Q(st) M(st) N(en) Q(en) M(en)
1 -133.138 130.459 219.637 133.138 -50.459 142.200
2 133.138 89.541 191.534 -133.138 -89.541 166.630
3 37.148 -83.331 -248.565 -37.148 83.331 -251.422
4 -49.807 87.607 106.36
5 49.807 -17.607 77.759
5 49.807 52.393 84.792 -49.807 -52.393 98.584
6 36.284 -41.270 -124.82
7 -36.284 41.270 -122.791
7 -8.538 53.891 47.067 8.538 16.109 19.051
8 8.538 16.109 24.207 -8.538 -16.109 32.175
图4.4.7 有侧移刚架
例2超静定平面桁架。计算图4.4.8a所示超静定平面桁架,各杆截面积A仍按实际值输入,而对截面惯矩I有两种处理方法(一种是取小值,但不可为零;另一种是取零,但令铰结点转角为零),计算结果一致。
The Terminal Forces(杆端力)
Member N(st) Q(st) M(st) N(en) Q(en) M(en)
1 .442
2 .0000 .0000 -.4422 .0000 .0000
2 -.5578 .0000 .0000 .5578 .0000 .0000
3 .0000 .0000 .0000 .0000 .0000 .0000
4 .4422 .0000 .0000 -.4422 .0000 .0000
5 .7888 .0000 .0000 -.7888 .0000 .0000
6 -.6254 .0000 .0000 .6254 .0000 .0000
例3多跨排架。计算如图4.4.9a所示的排架结构,E=常数。水平杆的轴向变形刚度无穷大,故其截面积A取一个大数(如103~105即可);水平链杆无弯矩,可取I=0,这时各杆I不为零(取实际值),总刚仍非奇异,故不必对铰结点加约束处理。
The Terminal Forces(杆端力)
Member N(st) Q(st) M(st) N(en) Q(en) M(en)
1 .000 72.616 248.545 .000 -12.616 7.152
2 .000 12.616 -7.152 .000 17.384 .000
3 17.38
4 .000 .000 -17.384 .000 .000
4 .000 17.384 .000 .000 -17.384 52.152
加转动约束条件(若I取很小值,但不等零,可不加约束),以保证总刚度矩阵非奇异。计算该组合结构,并绘内力图。
The Terminal Forces(杆端力)
Member N(st) Q(st) M(st) N(en) Q(en) M(en)
1 125.169 -1.723 .000 -125.169 1.723 -5.169
2 125.169 40.000 5.169 -125.169 40.000 -5.169
3 125.169 1.723 5.169 -125.169 -1.723 .000
4 -131.939 .000 .000 131.939 .000 .000
5 41.723 .000 .000 -41.723 .000 .000
12cm ,宽 2.5m ,刚架立柱截面尺寸40cm ×40cm 。横梁为无限刚性,E=常数。易算得
A=0.16m 2,I=2.133×10-3m 4,A W =0.3m 2,I W =0.1563m 4
。
如图划分单元。初始数据中剪力墙取实际截面面积和惯矩,刚架立柱取实际惯矩,由于不考虑轴向变形,故取较大的截面积;横梁惯矩和截面积均取较大值。两链杆取为适当的短杆以及很小的惯矩和足够大的截面积。矩阵位移法的计算结果与子结构法或混合法等手算结果一致。但本题计算剪力墙变形时没有考虑剪切变形的影响,如果剪力墙较宽(宽度大于高度的1/5时)则应采用考虑剪切变形的单元刚度矩阵计算,原单元刚度矩阵将作如下修正
[]
??
??????
???
????
?
?????
???
????Φ+Φ-Φ+Φ+-Φ+--Φ+Φ+Φ+Φ+=EI EI EI EI l EI l EI l EI
l EA l EA l
EI
l
EI l EI l EA k e )4(6)2(6)1(120)1(6)1(120
00)1()4()1(60)1(120
3
2323称对
4.4.5) 图4.4.11 框架剪力墙结构
The Terminal Forces (杆端力)
member N(st) Q(st) M(st) N(en) Q(en) M(en) 1 .0000 172.9483 1114.1950 .0000 -172.9483 -249.4535
2 .0000 49.8907 249.4535 .0000 -49.8907 .0000
3 -63.6350 13.5258 33.8146 63.6350 -13.5258 33.8145
4 -25.0546 25.0546 62.6366 25.0546 -25.0546 62.636
5 5 63.6351 13.5258 33.814
6 -63.6351 -13.5258 33.8145 6 25.0546 25.0546 62.6366 -25.0546 -25.0546 62.6365
7 -23.0576 .0000 .0000 23.0576 .0000 .0000
8 50.1093 .0000 .0000 -50.1093 .0000 .0000
9 -11.5288 -38.5804 -96.4511 11.5288 38.5804 -96.4511 10 25.0546 -25.0546 -62.6365 -25.0546 25.0546 -62.6365 例6 交叉梁系。试求图 4.4.12a 所示的交叉梁系的内力,各杆弹性常数相同。已知:
GJ P =2.4×104kN ·m 2,EI y =4×104kN ·m 4
(以G =0.4 E 计)。
交叉梁又称井字梁结构、格栅结构或平面板架,是空间刚架的一种特殊情况,作为屋盖、楼盖系统,桥面系统,平面网架,甲板骨架,不仅获得较大空间,也发挥了结构的最大效能,因此在工程上得到广泛应用。它实际上是xOy 平面内的一个刚架。只是外荷载作用方向与刚架平面垂直。在整体坐标系中,交叉梁系中每个结点有三个互相独立的位移分量,即绕Ox 轴与绕Oy 轴的转角θx 与θy 和沿z 轴方向的线位移w ;与之相应的结点力为扭矩M x 、弯矩M y 和剪力Q ;线位移和剪力符号沿坐标正向为正,转角和扭弯矩符号遵循左手法则,才能与平面刚架程序取得一致。此外,忽略轴向变形和结点在xOy 平面内的水平位移,也忽略绕Oz 轴的转角θz 。
梁单元结点位移表示为
{}[]T zj yj xj zi yi xi
w w θθθθδ= (4.4.6)
相应结点力向量表示为 {}[
]
T
j
yj
xj
i
yi xi
Q M M Q M M F = (4.4.7)
局部坐标系中的单元刚度矩阵可表达为
[]
???
?
???
??
?
??????????--------=3232223
23222/12/60/12/60/6/40/6/2000/00//12/60/12/60/6/20/6/4000/00/l EI l EI l EI l EI l EI l EI l EI l EI l GJ l GJ l EI l EI l EI l EI l EI l EI l EI l EI l GJ l GJ k y y y y y y y y P P y y y y y y y y P P (4.4.8)
式中,E 为材料的弹性模量;G 为材料的剪切模量;I y 、I x 分别为绕y 和x 轴的惯性矩;J P
为截面的极惯矩。
坐标转换矩阵[T]与平面刚架单元的坐标转换矩阵[T]相同。
整体坐标系中的单元刚度矩阵 [][][]
[]T k T k T
= (4.4.9)
在同类型荷载作用下,交叉梁系单元在非结点荷载作用下的固端力与平面刚架单元固端力计算公式在形式上完全相同。用矩阵位移法分析交叉梁系的计算步骤与分析平面刚架也完全相同。只要在主程序中增加一个主控参数,小改三个子程序。
The Results of Calculation (计算结果) The Joint Displacements (结点位移)
Joint THx THy Wz
1 6.693679E-21 -1.508649E-2
2 -3.530173E-21
2 -3.666667E-04 -2.514415E-04 -3.973564E-03
3 -5.227013E-21 -1.508649E-22 -2.430173E-21
4 -3.666667E-04 1.903727E-03 6.034595E-23 The Terminal Forces(杆端力)
2,
平面刚架静力分析程序中增加解特征值问题的子程序(如逆迭代法或子空间迭代法),利用矩阵位移法已集成的总刚,并建立几何刚度矩阵和结构质量矩阵,进行刚架的稳定性分
THE CALCULATED EIGENVALUES ARE
.1678728E+04 .5818800E+04 (即P cr=1678.728 kN)
THE CALCULATED EIGENVECTORS ARE
.4104E-19 -.1881E-19 -.3762E-19 -.1641E-02 .7514E-04 .2257E+00
.1852E-02 .2592E-03 -.5068E-01 .4556E+00 .3757E-04 .5029E-01
-.4281E-01 .1296E-03 .4662E-02 -.3578E-19 .4227E-20 -.3951E+00
-.5256E-20 .1458E-19 .3016E-01
.3462E-19 .1310E-19 .2618E-19 .1385E-02 -.7840E-03 -.1575E+00
.2904E-02 .5511E-03 .5299E+00 -.6511E-02 -.3920E-03 .1636E+00
.8482E+00 .2755E-03 .4923E-01 .3371E-20 -.4410E-19 -.1619E+00
-.3799E-19 .3100E-19 -.7017E+00
例8结构动力特性。试用SDAP程序分析图4.4.14a所示刚架发生横向剪切振动时的低阶自振频率和振型。已知材料弹性模量E=2.5×107kN/m2,横梁(包括楼板)的质量m=36t,柱的截面积和惯性矩分别为A=0.24m2和I=0.0128m4,假定横梁的轴向和弯曲刚度可视为无穷大,且不考虑柱子质量的影响。
THE CALCULATED FREQUENCIES ARE
.1257430E+02 .3286722E+02
MODAL VECTORS ARE
.6471E-19 .9620E-19 -.2597E-18 .6471E-19 -.9620E-19 -.2597E-18
.8715E-01 .1283E-02 -.2171E-03 .8715E-01 -.1283E-02 -.2171E-03
.1420E+00 .1637E-02 -.2741E-03 .1420E+00 -.1637E-02 -.2741E-03
图4.4.14 刚架动力分析
由于剪切型振动横梁刚度无穷大,故不必划分多个单元,建立初始数据文件时,假定横梁面积取大值(如1000m2),推算密度ρ=m/(A l)=3×10-3t/m3,横梁截面惯性矩也取一个远大于柱截面惯性矩的数值(如100m4)。算得最低两个频率:ω1=12.574rad/s,ω2=32.867rad/s 及其相应振型向量,绘出振型图(图4.4.14b、c),比精确值ω1=12.75rad/s小1.38%;比ω2=33.04rad/s小0.52%。由于集中质量,使得计算结果小于精确值。
单元10 超静定结构的计算 【学习目标】 1、掌握力法、位移法的基本原理,能用这些方法计算常用的简单超静定结构的内力; 2、熟练应用力矩分配法计算连续梁和无侧位移刚架;了解超静定结构的特征。 【知识点】 1、超静定结构的概念、超静定次数及确定;力法的基本原理、基本结构;典型方程;用力法计算简单的超静定梁和刚架;支座移动时单跨超静定梁的内力。 2、力矩分配法的基本原理;转动刚度、分配系数、传递系数、分配弯矩、传递弯矩;用力矩分配法计算连续梁和无侧移刚架。 【工作任务】 任务1 用力法计算超静定结构 任务2 用力矩分配法计算超静定结构 【教学设计】通过对力法和力矩分配法的学习让学生理解这两种方法在解决超静定结构各有何特点,通过例题的讲解能使学生能更好地理解两种方法在解超静定结构的特点。 10.1 用力法计算超静定结构 10.1.1 超静定次数的确定 我们知道,超静定结构由于有多余约束存在,约束反力未知量的数目多于平衡方程数目,仅靠平衡方程不能确定结构的支座反力。从几何组成方面来说,结构的超静定次数就是多余约束的个数;从静力平衡看,超静定次数就是运用平衡方程分析计算结构未知力时所缺少的方程个数,即多余未知力的个数。所以,要确定超静定次数,可以把原结构中的多余约束去掉,使之变成几何不变的静定结构,而去掉的约束个数就是结构的超静定次数。 超静定结构去掉多余约束有以下几种方法: (1)去掉支座处的一根链杆或者切断一根链杆,相当于去掉一个约束。图10-1 (2)去掉一个铰支座或者去掉一个单铰,相当于去掉两个约束。图10-2 图10-1
图10-2 (3)去掉一个固定端支座或者切断一根梁式杆,相当于去掉三个约束。图10-3 (4)将一个固定端支座改为铰支座或者将一刚性连接改为单铰连接,相当于去掉一个约束。图图10-4用去掉多余约束的方法可以确定任何超静定结构的次数,去掉多余约束后的静定结构,称为原超静定结构的基本结构。对于同一个超静定结构来说,去掉多余约束可以有多种方法,所以基本结构也有多种形式。但不论是采用哪种形式,所去掉的多余约束的数目必然是相同的。图10-5 (b)、(c)为去掉多余约束的基本结构,一个是悬臂梁,一个是简支梁,都是原结构的基本结构,它们去掉的多余约束都是三个。 这里要强调的是,基本结构必须是几何不变的静定结构,如图所示的刚架,如果去掉一个支座处的链杆的瞬变体系,是不允许的。 图10-3 图10-4
第4章超静定结构 §4.1 超静定结构特性 ●由于多余约束的存在产生的影响 1. 内力状态单由平衡条件不能惟一确定,必须同时考虑变形条件。 2. 具有较强的防护能力,抵抗突然破坏。 3. 内力分布范围广,分布较静定结构均匀,内力峰值也小。 4. 结构刚度和稳定性都有所提高。 ●各杆刚度改变对内力的影响 1. 荷载作用下内力分布与各杆刚度比值有关,与其绝对值无关。 2. 计算内力时,允许采用相对刚度。 3. 设计结构断面时,需要经过一个试算过程。 4. 可通过改变杆件刚度达到调整内力状态目的。 ●温度和沉陷等变形因素的影响 1. 在超静定结构中,支座移动、温度改变、材料收缩、制造误差等因素都可以引起内力,即在无荷载下产生自内力。 2. 由上述因素引起的自内力,一般与各杆刚度的绝对值成正比。不应盲目增大结构截面尺寸,以期提高结构抵抗能力。 3. 预应力结构是主动利用自内力调节超静定结构内力的典型范例。 §4.2 力法原理 ●计算超静定结构的最基本方法 超静定结构是具有多余联系(约束)的静定结构,其反力和内力(归根结底是内力)不能或不能全部根据静力平衡条件确定。力法计算超静定结构的过程一般是在去掉多余联系的静定基本结构上进行,并选取多余力(也称赘余力)为基本未知量(其个数等于原结构的超静定次数)。根据基本体系应与原结构变形相同的位移条件建立方程,求解多余力后,原结构就转化为在荷载和多余力共同作用下的静定基本结构的计算问题。这里,基本体系起了从超静定到静定、从静定再到超静定的过渡作用,即把未知的超静定问题转换成已知的静定问题来解决。 ●基本结构的选择(解题技巧) 1. 通常选取静定结构;也可根据需要采用比原结构超静定次数低的、内力已知的超静定结构;甚至可取几何可变(但能维持平衡)的特殊基本结构。 2. 根据结构特点灵活选取,使力法方程中尽可能多的副系数δij = 0。 3. 应选易于绘制弯矩图或使弯矩图限于局部、并且便于图乘计算的基本结构。 4. 对称取基本结构;或利用对称性取半结构;或求弹性中心;以减少未知力数目,并使力法方程解耦。 ●力法典型方程 典型方程可写成矩阵形式: δX+ Δ = C (4.2.1) 式中,δ为柔度系数矩阵(对称方阵);X为多余未知力列阵;Δ为自由项列阵(外因作用下的广义位移列阵);C为原结构多余联系处的已知位移(不一定为零)列阵。 ●力法的解题步骤 1. 确定基本未知量,合理选取基本结构。 2. 根据多余联系处的位移(变形)协调条件,建立力法方程。
第八章力法 本章主要内容 1)超静定结构的超静定次数 2)力法的解题思路和力法典型方程(显然力法方程中所有的系数和自由项都是指静定基本结构的位移,可以由上一章的求位移方法求出(图乘或积分)) 3)力法的解题步骤以及用于求解超静定梁刚架桁架组合结构(排架) 4)力法的对称性利用问题,对称结构的有关概念四点结论 5)超静定结构的位移计算和最后内力图的校核 6) §8-1超静定结构概述 一、静力解答特征: 静定结构:由平衡条件求出支反力及内力; 超静定结构的静力特征是具有多余力,仅由静力平衡条件无法求出它的全部(有时部分可求)反力及内力,须借助位移条件(补充方程,解答的唯一性定理)。 二、几何组成特征:(结合例题说明) 静定结构:无多余联系的几何不变体 超静定结构:去掉其某一个或某几个联系(内或外),仍然可以是一个几何不变体系,如桁架。即:超静定结构的组成特征是其具有多余联系,多余联系可以是外部的,也可能是内部的,去掉后不改变几何不变性。 多余联系(约束):并不是没有用的,在结构作用或调整结构的内力、位移时需要的,减小弯矩及位移,便于应力分布均匀。 多余求知力:多余联系中产生的力称为 三、超静定结构的类型(五种) 超静定梁、超静定刚刚架、超静定桁架、超静定拱、超静定组合结构 四、超静定结构的解法 综合考虑三个方面的条件: 1、平衡条件:即结构的整体及任何一部分的受力状态都应满足平衡方程; 2、几何条件:也称变形条件、位移条件、协调条件、相容条件等。即结构的变形必须 符合支承约束条件(边界条件)和各部分之间的变形连续条件。 3、物理条件:即变形或位移与内力之间的物理关系。 精确方法: 力法(柔度法):以多余未知力为基本未知量 位移法(刚度法):以位移为基本未知量。 力法与位移法的联合应用: 力法与位移法的混合使用:混合法 近似方法:
§1.3超静定结构的计算 超静定结构是具有多余约束的几何不变体系,仅根据静力平衡条件 不能求出其全部支座反力和内力,还须考虑变形协调条件。 计算超静定结构的基本方法是力法和位移法。这两种基本方法的解 题思路,都是设法将未知的超静定结构计算问题转换成已知的结构计算 问题。转换的桥梁就是基本体系,转换的条件就是基本方程,转换后要 解决的关键问题就是求解基本未知量。 1.3.1力法 力法是以多余未知力为基本未知量、一般用静定结构作为基本结构,以变形协调条件建立基本方程来求解超静定结构内力的计算方法。 (一)超静定次数的确定一 超静定结构多余约束(或多余未知力)的数目称为超静定次数,用 n表示。 确定超静定次数的方法是:取消多余约束法,即去掉超静定结构中 的多余约束,使原结构变成静定结构,所去掉的多余约束的数目即为原 结构的超静定次数。 在结构上去掉多余约束的方法,通常有如下几种: ●切断一根链杆,或者移去一个支座链杆,相当于去掉一个约束; ●将一个固定支座改成固定铰支座,或将受弯杆件某处改成铰接,相当于去掉一个抗转动约束; ●去掉一个联结两刚片的铰,或者撤去一个固定铰支座,相当于 去掉两个约束; ●将一梁式杆切断,或者撤去一个固定支座,相当于去掉三个约束。 (二)力法的基本原理法 现以图1-26a所示一次超静定结构为例,说明力法的基本原理。其中,要特别重视力法的三个基本概念。
图1-26 1、力法的基本未知量:取超静定结构中的多余未知力(如图1-26a 中的X1)作为力法的基本未知量,以X i表示。多余未知力在超静定结构内力分析中处于关键的地位,因此,有必要将其突出出来,作为主攻目标。力法这个名称也因此而得。 2、力法的基本体系:将原结构中的多余约束(如图1-26a中的支 座B)去掉,所得到的无任何外加因素的结构,称为力法的基本结构(图1-26b);基本结构在荷载和多余未知力共同作用下的体系,称为力法的基本体系(图1-26c)。在基本体系中,仍然保留原结构的多余约束反力X1,只是把它由被动力改为主动力,因此基本体系的受力状态与 原结构完全相同。由此看出,基本体系本身既是静定结构(可方便计算),又可用它代表原来的超静定结构。因此,它是由静定结构过渡到超静定结构的一座桥梁。 3、力法的基本方程:为求多余未知力,除平衡条件外,还须补充 新的条件,即利用原结构的已知变形条件。在本例中,基本体系沿多余未知力X1方向的位移Δ1应与原结构支座B处的竖向位移相同,即 Δ1=0 (a) 由图1-26d和e可知,变形条件(a)可表示如下: (b) 根据叠加原理,,于是可进一步将变形条件写成显含多余未知力X1的展开形式为
第5章力法 5.1 超静定结构的概念和超静定次数的确定 1. 超静定结构的概念 前面讨论的是静定结构,从本章开始我们讨论超静定结构的受力情况。关于结构的静定性可以从两个方面来定义从几何组成的角度来定义静定结构就是没有多余联系的几何不变体系;从受力的角度来定义,静定结构就是只用静力平衡方程就能求出全部反力和内力的结构。 现在,我们要讨论的是超静定结构。它同样可以从以上两个方面来定义,从几何组成的角度来定义,超静定结构就是具有多余联系的几何不变体系;从受力的角度来定义,超静定结构就是只用静力平衡方程不能求出全部的反力或内力的结构。如图5.1(a)所示的简支梁是静定的,当跨度增加时,其内力和变形都将迅速增加。为减少梁的内力和变形,在梁的中部增加一个支座,如图5.1(b)所示,从几何组成的角度分析,它就变成具有一个多余联系的结构。也正是由于这个多余联系的存在,使我们只用静力平衡方程就不能求出全部4个约束反力F ax、F ay、F by、F cy和全部内力。具有多余约束、仅用静力平衡条件不能求出全部支座反力或内力的结构称为超静定结构。图5.1(b)和图5.2所示的连续梁和刚架都是超静定结构。 图5.3给出了工程中常见的几种超静定梁、刚架、桁架、拱、组合结构和排架。本章讨论如何用力法计算这种类型的结构。 图5.1 图5.2 图5.3
2. 超静定次数的确定 力法是解超静定结构最基本的方法。用力法求解时,首先要确定结构的超静定次数。通常将多余联系的数目或多余未知力的数目称为超静定结构的超静定次数。如果一个超静定结构在去掉n个联系后变成静定结构,那么,这个结构就是n次超静定。 显然,我们可用去掉多余联系使原来的超静定结构(以后称原结构)变成静定结构的方法来确定结构的超静定次数。去掉多余联系的方式,通常有以下几种: (1) 去掉支座处的一根支杆或切断一根链杆,相当于去掉一个联系。如图5.4所示结构就是一次超静定结构。图中原结构的多余联系去掉后用未知力x1代替。 图5.4 (2) 去掉一个单铰,相当于去掉两个联系(图5.5) 图5.5 (3) 把刚性联结改成单铰联结,相当于去掉一个联系(图5.6)。 图5.6 (4) 在刚性联结处切断,相当于去掉三个联系(图5.7)。 应用上述去掉多余联系的基本方式,可以确定结构的超静定次数。应该指出,同一个超静定结构,可以采用不同方式去掉多余联系,如图 5.8(a)可以有三种不同的去约束方法,分别如图 5.8(b)、(c)、(d)所示。无论采用何种方式,原结构的超静定次数都是相同的。所以说去约束的方式不是惟一的。这里面所说的去掉“多余联系”(或“多余约束”),是以保证结构是几何不变体系为前提的。如图5.9(a)所示中的水平约束就不能去掉,因为它是使这个结构保持几何不变的“必要约束”(或“必要联系”)。如果去掉水平链杆(图5.9b),则原体系就变成几何可变了。
第七章超静定结构 授课学时:6学时 一、内容提要 1、理解超静定结构中的一些基本概念,即:静定与超静定、超静定次数、多余约束、超静定系统(结构)、 基本静定系以及相当系统等。 2、熟练掌握用力法求解超静定结构。 3、掌握对称与反对称性质并能熟练应用这些性质求解超静定结构。 4、了解连续梁的概念以及三弯矩方程。 二、基本内容 1、超静定系统中的一些基本概念 超静定结构或系统:用静力学平衡方程无法确定全部约束力和内力的结构或结构系统。 静定结构或系统:无多余联系的几何不变的承载结构系统,其全部约束反力与内力都可由静力平衡方程求出的机构或结构系统。 多余约束:在无多余联系的几何不变的静定系统上增加约束或联系。 外超静定:超静定结构的外部约束反力不能全由静力平衡方程求出的情况。 内超静定:超静定结构内部约束(或联系)形成的内力不能单由静力平衡方程求出的情况。 混合超静定结构:对于内、外超静定兼而有之的结构。 基本静定系:解除超静定结构的某些约束后得到静定结构,称为原超静定结构的基本静定系(简称为静定基)。静定基的选择可根据方便来选取,同一问题可以有不同选择。 相当系统:在静定基上加上外载荷以及多余约束力的系统称为静不定问题的相当系统。 超静定次数:超静定结构的所有未知约束反力和内力的总数与结构所能提供的独立的静力平衡方程数之差。 2、力法与正则方程 力法:以多余约束力为基本未知量,将变形或位移表示为未知力的函数,通过变形协调条件作为补充方程求来解未知约束力,这种方法称为力法,又叫柔度法。 应用力法求解超静定问题的步骤: 1)根据问题,确定其是静定还是超静定问题,如为后者,则确定超静定次数。 2)确定哪些约束是多余约束,分析可供选择的基本静定系,并注意利用对称性,反对称性,选定合适的静定系统,在静定系上加上外力和多余约束力,形成相当系统。
第六章位移法 超静定结构两类解法: 力法:思路及步骤,适用于所有静定结构计算。结合位移法例题中需要用到的例子。 有时太繁,例。别的角度:内力和位移之间的关系随外因的确定而确定。→位移法,E,超静定梁和刚架。 于是,开始有人讨论:有没有别的方法来求解或换一个角度来分析…,what? 我们知道,当结构所受外因(外荷载、支座位移、温度变化等)一定?内力一定?变形一定?位移一定,也就是结构的内力和位移之间有确定的关系(这也可以从位移的公式反映出来)。 力法:内力?位移,以多余力为基本未知量…,能否反过来,也就是先求位移?内力,即以结构的某些位移为基本未知量,先想办法求出这些位移,再求出内力。这就出现了位移法。 目前通用的位移法有两种:英国的、俄罗斯的,两者的实质是相同的。 以结构的某些结点位移作为基本未知量,由静力平衡条件先求出他们,再据以求出结构的内力和其它位移。 这种方法可以用于求解一些超静定梁和刚架,十分方便。 例:上面的例子,用位移法求解,只有结点转角一个未知量。 下面,我们通过一个简单的例子来说明位移法的解题思路和步骤: 一个两跨连续梁,一次超静定,等截面EI=常数,右跨作用有均布荷载q,(当然可以用力法求解),在荷载q作用下,结构会发生变形,无N,无轴向变形,B点无竖向位移,只有转角?B。且B点是一个刚结点传递M;变形时各杆端不能发生相对转动和移动,刚结点所连接的杆件之间角度受力以后不变。也就是AB、BC杆在结点B处的转角是相同的。原结构的受力和变形情况和b是等价的。 B当作固定端又产生转角?B。 a(原结构) AB: BC:
b 如果把转角?B 当作支座位移这一外因看,则原结构的计算就可以变成两个单跨超静定梁来计算。 显然,只要知道?B ,两个单跨静定梁的计算可以用力法求解出全部反力和内力,现在的未知量是?B (位移法的基本未知量)。 关键:如何求?B ?求出?B 后又如何求梁的内力?又如何把a ?b 来计算? 我们采用了这样的方法: 假定在刚结点B 附加一刚臂(▼),限制B 点转角,B ?固定端(无线位移,无转动)(略轴向变形)原结构就变成了AB 、BC 两个单跨超静定梁的组合体: AB : ,BC : 但现在和原结构的变形不符,?B ,所以为保持和原结构等效,人为使B 结点发生与实际情况相同的转角?B (以Z 1表示,统一)。一紧一松,两者抵消,C 结构和原结构等效,也就是:两者受力和变形相同。C 称原结构的基本结构,a 、b 、c 三个结构是相同的,现在我们可以用基本结构来代替原结构的计算,C 的未知量是Z 1,求Z 1的条件是B A q B C 2)在Z 1单独作用下力法求出(1Z M 图),B 隔离体。 6Z EI R = ——基本结构在Z 1单独作用下“▼”上的反力偶。 1111P 8 1l 通用,在Z 1处加单位转角1Z ?f 、1M 图
一. 用力法计算超静定结构 (一)复习重点 1. 理解超静定结构及多余约束的概念,学会确定超静定次数 2. 理解力法原理 3. 掌握用力法计算超静定梁和刚架(一次及二次超静定结构) 4. 掌握用力法计算超静定桁架和组合结构(一次及二次超静定结构) 5. 了解温度变化、支座移动时超静定结构的计算(一次超静定结构) (二)小结 1. 超静定结构、多余约束、超静定次数 (1)超静定结构 从几何组成角度,结构分为静定结构和超静定结构。 静定结构:几何不变,无多余约束。 超静定结构:几何不变,有多余约束。 (2)多余约束 多余约束的选取方案不唯一,但是多余约束的总数目是不变的。 (3)超静定次数 多余约束的个数是超静定次数。 判断方法:去掉多余约束使原结构变成静定结构。
2. 力法原理 力法是计算超静定结构最基本的方法 (1)将原结构变为基本结构 (2)位移条件: (3)建立力法方程
3.用力法求解超静定梁和刚架例:二次超静定结构 (1)原结构变为基本结构 (2)位移条件 (3)力法方程
(3)绘弯矩图 4. 用力法计算超静定桁架和组合结构 注意各杆的受力特点:二力杆只有轴力,受弯杆的内力有弯矩、剪力和轴力。 例:超静定组合结构 (1)原结构变为基本结构 (2)位移条件
(3)力法方程 (4)绘弯矩图 5. 了解温度变化、支座移动时超静定结构的内力计算 (1)温度变化时,超静定结构的内力计算 原结构变为基本结构 位移条件 力法方程
(2)支座移动时,超静定结构的内力计算 原结构变为基本结构 位移条件 二. 用位移法计算超静定结构 (一)复习重点 1. 了解位移法基本概念及位移法与力法的区别 2. 掌握用位移法计算超静定结构(具有一个及两个结点位移) 3. 掌握计算对称结构的简化方法 (二)小结 1. 了解位移法基本概念及位移法与力法的区别 位移法是求解超静定结构的又一基本方法,适用于求解超静定次数较高的连续梁和刚架。 位移法的前提假设:对于受弯的杆件,可略去轴向变形和剪切变形的影响,且弯曲变形是微 2. 掌握用位移法求解超静定结构(具有一个及两个结点位移的结构) 例:求连续梁的内力 解:(1)确定基本未知量及基本体系
结构力学静定结构与超静定结构建筑类 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】
1、静定与超静定结构的概念:无多余约束的几何不变体系是静定结构 静定结构:由静力平衡方程可求出所有内力和约束力的体系 有多余约束的几何不变体系是超静定结构 超静定结构:由静力平衡方程不能求出所有内力和约束力的体系. 瞬变体系不能作为结构:瞬变体系的主要特性为: 1.可发生微量位移,但不能继续运动 2.在变形位置上会产生很大内力 3.在原位置上,一般外力不能平衡 4.在特定荷载下,可以平衡,会产生静不定力 5.可产生初内力. 常变体系是一种机构而不是结构 2、静定结构的内力分析方法 几何特性:无多余联系的几何不变体系 静力特征:仅由静力平衡条件可求全部反力内力 求解一般原则:从几何组成入手,选择合适的隔 离体,使得一个隔离体上未知力的个数不超过三个,如果力系为平面汇交力系,则不应超过两个。一般按照几何组成的相反顺序分析。 一、单跨梁的内力分析 弯矩、剪力、荷载集度之间的微分关系 1.无荷载分布段(q=0),Q图为水平线,M图为斜直线。 2.均布荷载段(q=常数),Q图为斜直线,M图为抛物线,且凸向与荷载指向相同。 3.集中力作用处,Q图有突变,且突变量等于力值; M图有尖点,且指向与荷载相同。
4.集中力偶作用处,M图有突变,且突变量等于力偶值; Q图无变化。 内力计算的关键在于:正确区分基本 部分和附属部分. 熟练掌握单跨梁的 计算. 单体刚架(联合结构)的支座反力(约 束力)计算 方法:切断约束,取一个刚片为隔离 体,假定约束力的方向,由隔离体的平衡建立三个平衡方程。 四.刚架弯矩图的绘制做法:拆成单个杆,求出杆两端的弯矩,按与单跨梁相同的方法画弯矩图. 分段定点连线 六.由做出的剪力图作轴力图 做法: 逐个杆作轴力图,利用结点的平衡条件,由已知的杆端剪力和求杆端轴力,再由杆端轴力画轴力图.注意:轴力图画在杆件那一侧均可,必须注明符号和控制点竖标.
习 题 9-2 解:设EI=6,则5.1,1==BC AB i i 53 .05 .13145 .1347 .05 .13141 4=?+??==?+??=BC BA μμ 结点 A B C 杆端 AB BA BC 分配系数 固端 0.47 0.53 绞支 固端弯矩 -60 60 -30 0 分配传递 -7.05 -14.1 -15.9 0 最后弯矩 -67.05 45.9 -45.9 ()()() 逆时针方向215.216005.6721609.4522131m KN EI EI m M m M i AB AB BA BA B ?-=?? ? ???+---= ? ?????---=θ (b)解:设EI=9,则 3 ,31,1====BE BD BC AB i i i i 12 .01 41333331 316.01 41333331 436 .0141333333 3=?+?+?+??==?+?+?+??==?+?+?+??= =BC BA BE BD μμμμ 结点 A B C 杆端 AB BA BC BD BE 分配系数 固端 0.16 0.12 0.36 0.36 绞支 固端弯矩 0 45 -90 0 分配传递 3.6 7.2 5.4 16.2 16.2 0 最后弯矩 3.6 7.2 5.4 61.2 -73.8 ()()()顺时针方向22.1606.32102.732131m KN EI EI m M m M i AB AB BA BA B ?=?? ????---= ?? ? ???---= θ 9-3 (a) 解:B为角位移节点 设EI=8,则1==BC AB i i ,5.0==BC BA μμ 固端弯矩()m KN l b l Pab M BA ?=????=+=488212 443222 2 m KN l M BC ?-=?+- =58262 1 892 结点力偶直接分配时不变号 结点 A B C 杆端 AB BA BC 分配系数 铰接 0.5 0.5 固端弯矩 0 48 -58 12 分配传递 0 50 50 5 5 12 最后弯矩 103 -3 12
静定结构与超静定结构静力常用计算公式 一、短柱、长柱压应力极限荷载计算公式 1、短柱压应力计算公式 荷载作用点 轴方向荷载 A F = σ bh F = σ 偏心荷载 ) 1(2 1x Y i ye A F W M A F - = -= σ )1(2 2 x Y i ye A F W M A F + =+ =σ )61(2,1h e bh F ± = σ 偏心荷载 ) 1(2 2x y y x x x y Y i ye i xe A F I x M I x M A F ± ±= ?± ?± = σ ) 661(b e h e bh F y x ± ± = σ 长短柱分界点如何界定? 2、长柱方程式及极限荷载计算公式 支座形式 图 示 方 程 式 极限荷载 一般式 n=1 两端铰支 β=1 y a dx y d ?=2 2 2 ax B ax A y sin cos += y F M EI F a ?== ,2 EI l n 2 2 2 π EI l 2 2π 一端自由他端固定 β=2 y a dx y d ?=2 2 2 ax B ax A y sin cos += EI l n 2 2 24)12(π - EI l 2 24π
y F M EI F a ?== ,2 两端固定 β=0.5 )(2 2 =- +F M y a dx y d A F M ax B ax A y A + +=sin cos A M y F M EI F a +?-== ,2 EI l 2 2 4π EI l 2 2 4π 一端铰支他端固定 β=0.75 )(2 2 2 x l EI Q y a dx y d -= ?+ ) (sin cos x l F Q ax B ax A y -+ +=水平荷载 -= Q EI F a ,2 —— EI l 2 2 7778.1π 注:压杆稳定临界承载能力计算公式:EI l P cr 2 2) (βπ = 二、单跨梁的反力、剪力、弯矩、挠度计算公式 1、简支梁的反力、剪力、弯矩、挠度计算公式 荷载形式 M 图 V 图 反力 2 F R R B A = = L Fb R A = L Fa R B = 2 qL R R B A = = 4 qL R R B A = = 剪力 V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R B
第十章静定结构和超静定结构 课题:第一节结构的计算简图 [教学目标] 一、知识目标: 1、理解结构计算简图的作用和意义。 2、掌握结构计算简图基本的简化方法。 二、能力目标: 通过对结构计算简图的讲解,提高学生分析问题的能力。 三、素质目标: 培养学生善于区分事物的主要矛盾和次要矛盾 [教学重点] 1、支座的简化和节点的简化。 2、计算简图的概念和要求。 [难点分析] 计算简图简化的原理。 [学生分析] 学生由于缺乏实际工程知识,不太理解计算简图的作用以及这种分析方法。[辅助教学手段] 理论联系实际、分析、讨论的方法 [课时安排] 1课时 [教学内容] 一、导入新课 何谓结构?结构的举例。通过启发学生联系工程实例,理解结构的概念。 二、新课讲解 1.结构的计算简图 2.结构的计算简图应满足的要求 (1)基本上反映结构的实际工作性能 (2)计算简便 3.实际结构的计算简图的简化 (1)支座的简化 三种形式;简支梁、阳台、柱的实例。 (2)节点的简化 铰节点和刚节点的特点及其应用 (3)构件的简化 实际上是力学中杆件的简化
(4)荷载的简化 集中荷载和均布荷载 三、讨论 1 牛腿柱的计算简图 2 雨蓬的计算简图 四、小结 在结构设计中,选定了结构的计算简图后,在按简图计算的同时,还必须采取相应的措施,以保证实际结构的受力和变形特点与计算简图相符。 五、作业 思考题:1 课题:第二节平面结构的几何组成分析 [教学目标] 一、知识目标: 1、理解几何组成分析的作用和意义。 2、了解结构从几何组成的观点的分类。 3、了解结构几何组成分析的规则和方法。 4、了解静定结构和超静定结构的概念。 5、会对简单结构进行几何组成分析。 二、能力目标: 通过对结构几何组成分析的讲解,提高学生分析问题的能力。 三、质目标: 培养学生善于区分事物的主要矛盾和次要矛盾 [教学重点] 1、几何组成分析的意义和结果。 2、几何组成分析的方法。 [难点分析] 结构几何组成分析的概念和方法都比较抽象,尤其是方法,学生学习起来比较困难。讲解时,淡化理论,结合例题讲解。 [学生分析] 学生由于对自由度、钢片、约束的概念比较生疏,所以理解这节内容比较困难,因而,讲解时,突出重点,难点内容只做介绍。 [辅助教学手段] 理论联系实际、分析、讨论的方法 [课时安排] 2课时
静定结构和超静定结构的优缺点及工程应用 一、静定结构和超静定结构的概念 静定结构与超静定结构都是几何不变体系。在几何构造方面,两者不同在于:静定结构无多余联系,而超静定结构则具有多余联系。 有多余约束( n > 0)的几何不变体系——超静定结构; 无多余约束( n = 0)的几何不变体系——静定结构。 静定结构──几何特征为无多余约束几何不变,是实际结构的基础。因为静定结构撤销约束或不适当的更改约束配置可以使其变成可变体系,而增加约束又可以使其成为有多余约束的不变体系(即超静定结构)。静定结构的约束反力或内力均能通过静力平衡方程求解, 也就是说,其未知的约束反力或内力的数目等于独立的静力平衡方程的数目。静定结构在工程中被广泛应用,同时是超静定结构分析的基础。 超静定结构——几何特征为几何不变但存在多余约束的结构体系,是实际工程经常采用的结构体系。由于多余约束的存在,使得该类结构在部分约束或连接失效后仍可以承担外荷载,但需要注意的是,此时的超静定结构的受力状态与以前是大不一样的,如果需要的话,要重新核算。因为其结构中有不需要的多余联系,所以所受的约束反力或内力仅凭静力平衡方程不能全部求解,也就是未知力的数目多于独立的静力平衡方程的个数。 二、静定结构的基本特性及优缺点 1、静定结构是几何不变体系,无多余约束,全部支座反力和内力只要用静力平衡条件就能确定,而且解答是唯一的。 2、静定结构的支座反力和内力与结构所用材料的性质、截面的大小和形状都没有关系。 3、静定结构在温度改变、支座移动、材料伸缩和制造误差等因素影响下,都不产生制作反力和内力。即没有荷载作用在静定结构上时,支座反力均为零,所以内力也均为零。 4、静定结构的局部平衡特性 在一组平衡力系作用下,如果静定结构中的某一几何不变部分可以与荷载平衡,则只会是该部分产生内力,其余部分的支座反力和内力均为零。当平衡力系作用于静定结构的任何本身几何不变部分上时,若设想其余部分均不受力而将它们撤去,则所剩部分由于本身是温度变化 (自由地产生弯曲变形,不产生内力) 支座移动(刚体位移,不产生内力)制造误差
静定结构超静定结构不同 静定结构与超静定结构的不同 1、静定结构是无多余约束的几何不变体;静定结构中,温度变化、支座移动等不会在结构中产生附加应力。 2、超静定结构是在静定结构的基础上增加了(多余)的约束;超静定结构会随温度变化及支座移动均可能在结构中产生附加应力。 附:机械设计通用的技术要求 1.零件去除氧化皮。 2.零件加工表面上,不应有划痕、擦伤等损伤零件表面的缺陷。 3.去除毛刺飞边。 4.经调质处理,HRC50~55。 5.零件进行高频淬火,350~370℃回火,HRC40~45。 6.渗碳深度0.3mm。 7.进行高温时效处理。 8.未注形状公差应符合GB1184-80的要求。 9.未注长度尺寸允许偏差±0.5mm。 10.铸件公差带对称于毛坯铸件基本尺寸配置。 11.未注圆角半径R5。 12.未注倒角均为2×45°。 13.锐角倒钝。 14.各密封件装配前必须浸透油。 15.装配滚动轴承允许采用机油加热进行热装,油的温度不得超过100℃。 16.齿轮装配后,齿面的接触斑点和侧隙应符合GB10095和GB11365的规定。 17.装配液压系统时允许使用密封填料或密封胶,但应防止进入系统中。 18.进入装配的零件及部件(包括外购件、外协件),均必须具有检验部门的合格证方能进行装配。 19.零件在装配前必须清理和清洗干净,不得有毛刺、飞边、氧化皮、锈蚀、切屑、油污、着色剂和灰尘等。 20.装配前应对零、部件的主要配合尺寸,特别是过盈配合尺寸及相关精度进行复查。 21.装配过程中零件不允许磕、碰、划伤和锈蚀。 22.螺钉、螺栓和螺母紧固时,严禁打击或使用不合适的旋具和扳手。紧固后螺钉槽、螺母和螺钉、螺栓头部不得损坏。 23.规定拧紧力矩要求的紧固件,必须采用力矩扳手,并按规定的拧紧力矩紧固。 24.同一零件用多件螺钉(螺栓)紧固时,各螺钉(螺栓)需交叉、对称、逐步、均匀拧紧。 25.圆锥销装配时应与孔应进行涂色检查,其接触率不应小于配合长度的60%,并应均匀分布。 26.平键与轴上键槽两侧面应均匀接触,其配合面不得有间隙。 27.花键装配同时接触的齿面数不少于2/3,接触率在键齿的长度和高度方向不得低于50%。 28.滑动配合的平键(或花键)装配后,相配件移动自如,不得有松紧不均现象。 29.粘接后应清除流出的多余粘接剂。 30.轴承外圈与开式轴承座及轴承盖的半圆孔不准有卡住现象。
超静定结构解决思路 Prepared on 22 November 2020
超静定结构 超静定结构 静定结构是没有多余约束的结构,结构体系中任何一个约束去掉后,结构都失去稳定性,成为机构,因而也就不能够继续承担荷载。因此,静定结构是相对危险的,任意约束失效后都会导致整体结构的失效。为了保证结构的安全性,需要对于静定结构增加约束,成为有多余约束的结构——超静定结构。 超静定结构有多余约束,当其中某个约束失效后,所承担的作用由其他约束承担,整体结构仍处于稳定状态,可以继续承担荷载,但是,超静定结构在失去部分或全部多余约束后,内力会出现重新分布的现象,是否破坏要重新计算。 超静定结构的思路 对于超静定结构,静定结构的解题思路是难以解决的:静定结构中无论是外力还是内力,均依靠力系平衡方程或方程组实现,但超静定结构的多余约束导致有效方程数少于未知数的数量。 因此,超静定问题宜从以下方面思考: 首先,如果结构整体是平衡的,结构内部任意组成部分、点、段落也一定是平衡的; 其次,对于任意多余约束是可以去掉的,并以相应的约束力来替代的,替代之后的结构各个部分依然平衡切除替代点外没有任何变化; 第三,结构中任意相临的、距离为 0 的两点间的相对位移与转角均为0; 第四,弹性结构体系中,各个构件受力后产生的变形是协调的。 基于上面的基本思路,对于超静定结构常用的 方法是力法与位移法。 力法 力法是计算超静定结构的基本方法,是利用结 构的变形协调来实现的。 力法的基本思路是: 弹性结构体系中,各个构件受力后产生的变形 是协调的; 除去多余约束后,以约束力替代原约束,并与结构等效; 除去约束后的结构在其上的外力系[P]的作用下,会产生各种变形,其中在除去约束后的原约束点的位移是:[Δp] 结构原有的约束力也会导致结构在约束点的相关 变形:[x][δ],[x]:除去的多余的约束,[δ]:当多余 约束为 1 时的各个约束点变形。 但是在原结构中,被除去的多余约束点由于约束 的作用,其相应的位移为0,因此有: [x][δ] +[Δp] =0 如果设多余约束为n个,则力法线性方程组为: x1δ11 + x2δ12 + x3δ13+…… + x nδ1n +Δ1p = 0
第四节超静定结构的受力分析及特性 一、超静定结构的特征及超静定次数 超静定结构的几何特征是除了保证结构的几何不变性所必须的约束外,还存在多余约束。 超静定结构的静力特征是仅由静力平衡条件不能唯一地确定全部未知反力和内力。 结构的多余约束数或用静力平衡条件计算全部未知反力和内力时所缺少的方程数称为结构的超静定次数。 通常采用去除多余约束的方法来确定结构的超静定次数。即去除结构的全部多余约束,使之成为无多余约束的几何不变体系,这时所去除的约束数就是结构的超静定次数。 去除约束的方法有以下几种: (一)切断一根两端铰接的直杆(或支座链杆),相当于去除一个约束。 (二)切断一根两端刚接的杆件,相当于去除三个约束。 (三)切断——个单铰(或支座固定铰),相当于去除二个约束;切断一个复铰(连接n根杆件的铰),相当于去除2(n—1)个约束。 (四)将单刚结点改为单铰节点,相当于去除一个约束;将连接n个杆件的复刚节点改为复铰节点,相当于去除n—1个约束。 去除一个超静定结构多余约束的方法可能有几种,但不管采用哪种方法,所得超静定次数一定相同。 去除图4—1a所示超静定结构的多余约束的方法之一如图4—1b所示,去除六个多余约束后,就成为静定结构,故为超静定六次。再用其他去除多余约束的方案确定其超静定次数,结果是相同的。 (a)(b) 图4-1
二、力法的基本原理 (一)力法基本结构和基本体系 去除超静定结构的多余约束,代以相应的未知力X i (i=1、2、…、n),X i 称为多余未知力或基本未知力,其方向可以任意假定。去除多余约束后的结构称为力法基本结构。力法基本结构在各多余未知力、外荷载(有时还有温度变化、支座位移等)共同作用下的体系称为力法基本体系,它是用力法计算超静定结构的基础。 选取力法基本结构应注意下面两点: 1.基本结构一般为静定结构,即无多余约束的几何不变体系。有时当简单超静定结构的解为已知时,也可以将它作为复杂超静定结构的基本结构,以简化计算。 2.选取的基本结构应使力法典型方程中的系数和自由项的计算尽可能简便,并尽量使较多的副系数和自由项等于零。
建筑力学问题简答(七)超静定结构内 力计算 194.什么是超静定结构?它和静定结构有何区别? 答:单靠静力平衡条件不能确定全部反力和內力的结构为超静定结构。 从几何组成的角度看,静定结构是没有多余约束的几何不变体系。若去掉其中任何一个约束,静定结构即成为几何可变体系。也就是说,静定结构的任何一个约束,对维持其几何不变性都是必要的,称为必要约束。对于超静定结构,若去掉其中一个甚至多个约束后,结构仍可能是几何不变的。 195.什么是超静定结构的超静定次数? 答:超静定结构多余约束的数目,或者多余约束力的数目,称为结构的超静定次数。 196.超静定结构的基本结构是否必须是静定结构? 答:超静定结构的基本结构必须是静定结构。 197.如何确定超静定结构的超静定次数? 答:确定结构超静定次数的方法是:去掉超静定结构的多余约束,使之变为静定结构,则去掉多余约束的个数,即为结构的超静定次数。 198.撤除多余约束的方法有哪几种? 答:撤除多余约束常用方法如下: (1)去掉一根支座链杆或切断一根链杆,等于去掉一个约束。 (2)去掉一个固定铰支座或拆去一个单铰,等于去掉两个约束。 (3)去掉一个固定端支座或把刚性连接切开,等于去掉三个约束。 199.用力法计算超静定结构的基本思路是什么? 答:用力法计算超静定结构的基本思路是: 去掉超静定结构的多于约束,代之以多余未知力,形成静定的基本结构;取多余未知力作为基本未知量,通过基本结构的位移谐调条件建立力法方程,利用这一变形条件求解多余约束力;将已知外荷载和多余约束力所引起的基本结构的内力叠加,即为原超静定结构在荷载作用下产生的内力。 200.什么是力法的基本结构和基本未知量? 答:力法的基本结构是:超静定结构去掉多余约束后得到的静定结构。力法的基本未知量是对应于多余约束的约束反力。 201.简述n 次超静定结构的力法方程,及求原结构的全部反力和內力的方法。 答:(1)n 次超静定结构的力法方程 对于n 次超静定结构,撤去n 个多余约束后可得到静定的基本结构,在去掉的n 个多余约束处代以相应的多余未知力。当原结构在去掉的多余约束处的位移为零时,相应地也就有n 个已知的位移谐调条件:Δi =0(i =1,2,…,n )。由此可以建立n 个关于求解多余未知力的方程: 00 22112222212111212111=?++++=?++++=?++++nP n nn n n P n n P n n X X X X X X X X X δδδδδδδδδ 式中: δii 称为主系数,表示当X i =1作用在基本结构上时,X i 作用点沿X i 方向的位移。由于δ
六超静定结构內力计算 1.什么是超静定结构?它和静定结构有何区别? 答:单靠静力平衡条件不能确定全部反力和內力的结构为超静定结构。 从几何组成的角度看,静定结构是没有多余约束的几何不变体系。若去掉其中任何一个约束,静定结构即成为几何可变体系。也就是说,静定结构的任何一个约束,对维持其几何不变性都是必要的,称为必要约束。对于超静定结构,若去掉其中一个甚至多个约束后,结构仍可能是几何不变的。 2.什么是超静定结构的超静定次数? 答:超静定结构多余约束的数目,或者多余约束力的数目,称为结构的超静定次数。3.超静定结构的基本结构是否必须是静定结构? 答:超静定结构的基本结构必须是静定结构。 4.如何确定超静定结构的超静定次数? 答:确定结构超静定次数的方法是:去掉超静定结构的多余约束,使之变为静定结构,则去掉多余约束的个数,即为结构的超静定次数。 5.撤除多余约束的方法有哪几种? 答:撤除多余约束常用方法如下: (1)去掉一根支座链杆或切断一根链杆,等于去掉一个约束。 (2)去掉一个固定铰支座或拆去一个单铰,等于去掉两个约束。 (3)去掉一个固定端支座或把刚性连接切开,等于去掉三个约束。 6.用力法计算超静定结构的基本思路是什么? 答:用力法计算超静定结构的基本思路是: 去掉超静定结构的多于约束,代之以多余未知力,形成静定的基本结构;取多余未知力作为基本未知量,通过基本结构的位移谐调条件建立力法方程,利用这一变形条件求解
多余约束力;将已知外荷载和多余约束力所引起的基本结构的内力叠加,即为原超静定结构在荷载作 用下产生的内力。 7.什么是力法的基本结构和基本未知量? 答:力法的基本结构是:超静定结构去掉多余约束后得到的静定结构。力法的基本未知量是对应于多余约束的约束反力。 8.简述n次超静定结构的力法方程,及求原结构的全部反力和內力的方法。 答:(1)n次超静定结构的力法方程 对于n次超静定结构,撤去n个多余约束后可得到静定的基本结构,在去掉的n个多余约束处代以相应的多余未知力。当原结构在去掉的多余约束处的位移为零时,相应地也就有n个已知的位移谐调条件:Δi=0(i=1,2,…,n)。由此可以建立n个关于求解多余未知力的方程: (6-5) 式中: δii称为主系数,表示当Xi=1作用在基本结构上时,Xi作用点沿Xi方向的位移。由于δii是Xi=1引起的自身方向上的位移,故恒大于零。可由自身图乘得出。 δij称为副系数,表示当Xj=1作用在基本结构上时,Xi作用点沿Xi方向的位移。可正可负也可等于零。由位移计算公式: