双 闭 环 直 流 调 速 系 统 姓名: 学号: 专业:电气工程及其自动化 日期:2015年12月23日
摘要 直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。 关键词:双闭环,转速调节器,电流调节器 双闭环直流调速系统的设计 双闭环直流调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流, 即分别引入转速负反馈和电流负反馈。 两者之间实行嵌套连接,且都带有输出限幅电路。转速调节器 ASR 的输出限幅电压*im U 决定了电流给定电压的最大值;电流调节器 ACR 的输出限幅电压cm U 限制了电力电子变换器的最大输出电压dm U 。 由于调速系统的主要被控量是转速, 故把转速负反馈组成的环作为外环, 以保证电动机的转速准确跟随给定电压, 把由电流负反馈组成的环作为内环, 把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE ,这就形成了转速、电流双闭环调速系统。
基于 PLC 的矿井提升机控制系统设计
2010-2-9 20:25:00 来源:
1 引言目前,我国绝大部分矿井提升机(超过 70% )采用传统的交流提升机电控系统(tkd-a 为代 表)。tkd 控制系统是由继电器逻辑电路、大型空气接触器、测速发电机等组成的有触点控制系统。经 过多年的发展,tkd-a 系列提升机电控系统虽然已经形成了自己的特点,然而其不足之处也显而易见, 它的电气线路过于复杂化,系统中间继电器、电气接点、电气联线多,造成提升机因电气故障停车事 故不断发生。采用 plc 技术的新型电控系统都已较成功的应用于矿井提升实践,并取得了较好的运行经 验,克服了传统电控系统的缺陷,代表着交流矿井提升机电控技术发展的趋势。2 总体设计方案基于 plc 技术的矿井交流提升机电控系统控制电路组成结构如图 1 所示,要由以下 5 部分组成:高压主电路 (包括高压换向器、电动机、启动柜、动力制动电源)、主控 plc 电路、提升行程检测与显示电路、提 升速度检测、提升信号电路,其中高压主电路部分仍采用传统的继电器控制电路。
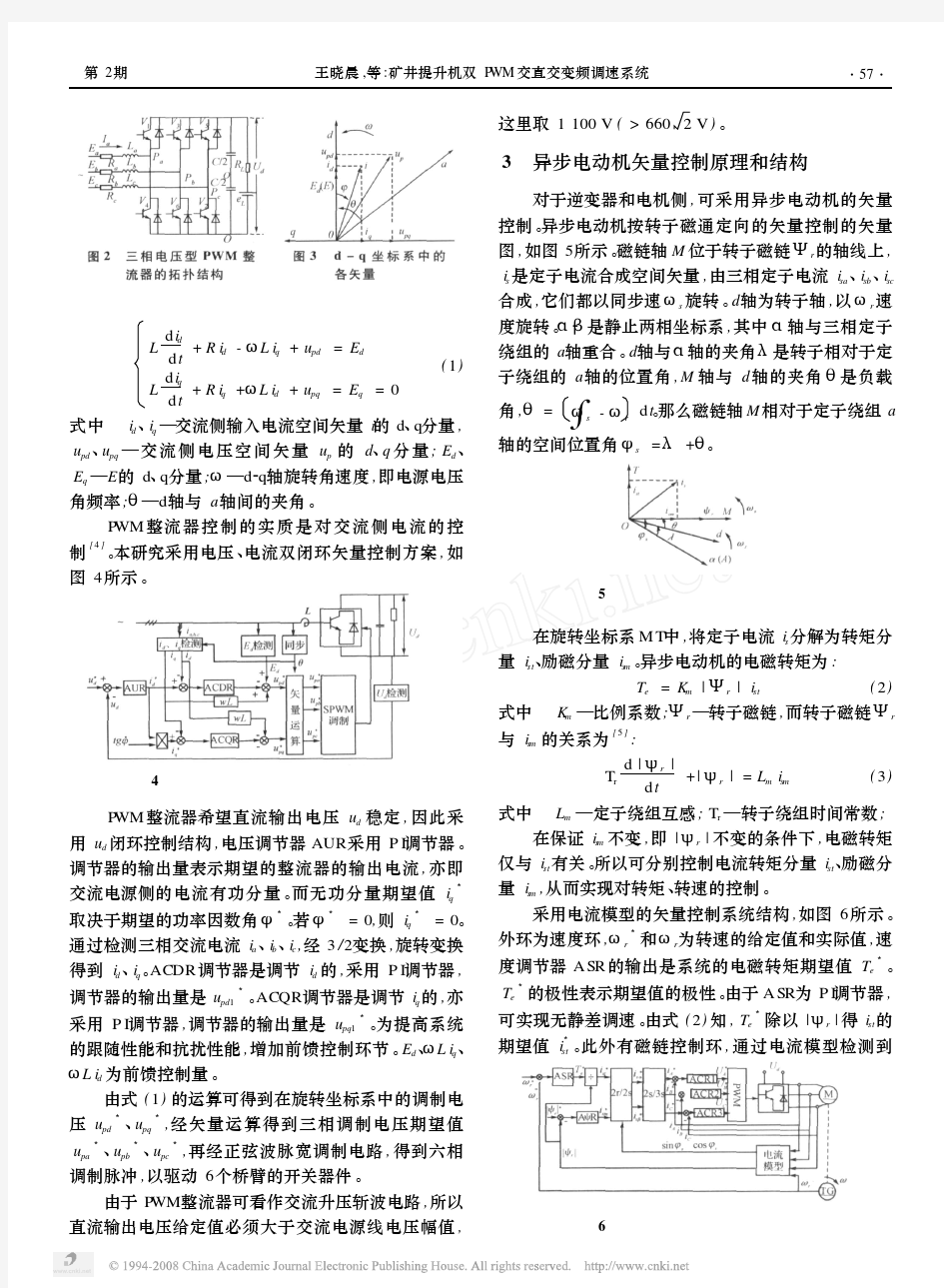
图 1 矿井交流提升机电控系统 框图 工作过程:当井口或井底通过信号通信电路发出开车信号后,开车条件具备。司机将制动手柄向前推 离紧闸位置,主电动机松闸。司机将主令控制器的操作手柄推向正向(或反向)极端位置,主控 plc 通 过程序控制高压换向器首先得电,使高压信号送入主电动机定子绕组,主电动机接入全部转子电阻启 动,然后依次切除 8 段电阻,实现自动加速,最后运行在自然机械特性上。交流提升机运行时,旋转 编码器跟随主电动机转动,输出 2 列 a/b 相脉冲,分别接到主控 plc 的高速计数器 hsc0 的 a/b 相脉冲输 入端,由主控 plc 根据 a/b 脉冲的相位关系,自动确定 hsc0 的加、减计数方式。根据 hsc0 的计数值,就 可以计算出提升行程并显示。同时只根据旋转编码器输出的 a 相脉冲,主控 plc 进行加计数。根据 hsc1 在恒定间隔时间内的计数值,就可以计算出提升速度。 3 硬件设计 3.1 提升机主回路部分设计主回路用于供给提升电动机电源,实现失压、过流保护,控制电机的转向和 调节转速。主回路由高压开关柜、高压换向器的常开触头、动力制动接触器的常开主触头、动力制动 电源装置、提升电动机、电机转子电阻、加速接触器的常开主触头(1jc~8jc)和装在司机操作台上的 指示电流表和电压表等组成。系统原理图如图 2 所示。
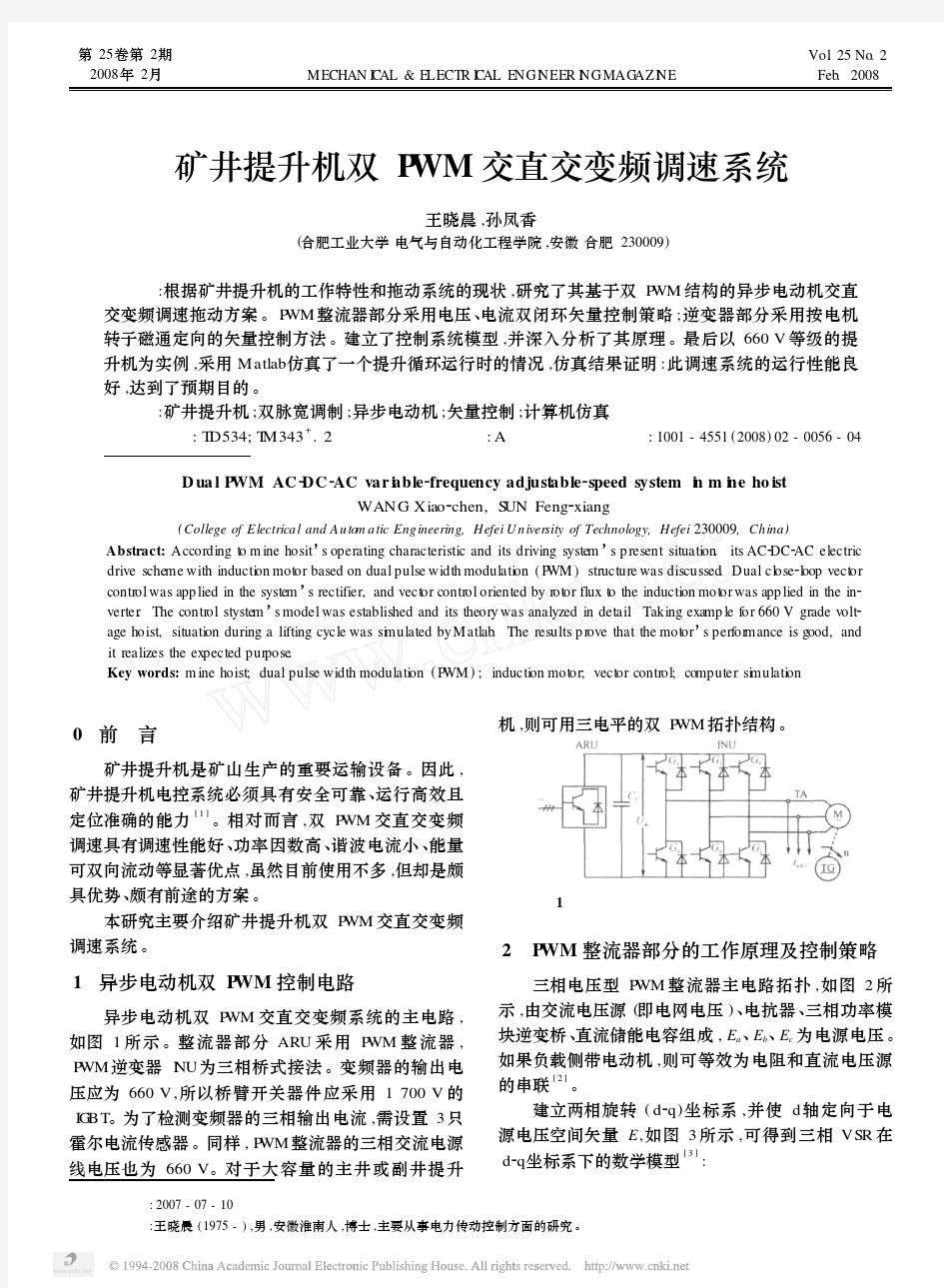
交直交变频器 一变频器开发基础 三相交流异步电动机发明于1881年,一经问世,便以起结构简单,坚固,价格低廉二迅速的在电力拖动领域成为拖动系统中"骄子"。但正式由于其结构,在调速性能上使其失去欢颜。从异步电动机的转速公式n=60f/p(1-s) ,可知。除变频{f}调速以外,异步电机调速基本途径有:1改变极对数{p}。2改变转差率{s}。显然其调速缺点为调速范围低,工作效率下降,负载能力不一致,消耗电能多,机械特性较软,控制电路较复杂。科技的进步,社会的发展,要求生产机械对电动机进行无级调速满足工艺要求是多么的迫切。 随着20世纪60年代功率晶闸管{SCR},70年代功率晶体管{GTR},可关断晶闸管{GTO},80年代绝缘栅双极晶体管{IGBT}的相继开发,把变频器由希望,推广,发展到今天的普及阶段。 二变频器基本结构 目前应用的最广泛的是交直交变频器,其基本结构如图所示: 其工作过程是先将三相{或单相}不可调工频电源经过整流桥整流成直流电,再经过逆变桥把直流电逆变成频率任意可调的交流电,以实现无级调速。 逆变器的原理框图 三功率部分 交直交变频器的主电路如图所示,变频器调速过程中出现的许多现象都应通过主电路来进行分析,因此,熟悉主电路的结构,透彻了解各部分的原理,具有十分重要的意义。 1 交-直变换电路 ⑴图I(VD1-VD6)为交直变换全波整流电路,在中小容量变频器中,整流器件采用不可控整流二极管或二极管模块。(2)图中(CF1 CF2)为滤波电容器,由于交流电被整流出的直流电中会有交流含量,为了获取平稳的直流电而设置滤波电容。(3)因为电解电容器的电容量有较大的离散性,故电容器组CF1 和CF2的电容量常不能完全相等,这将导致各自压降不相等。为了使其压降相等,在CF1 CF2旁各并联一个阻值相等的均压电阻RC1和RC2。(4)(RH HL)为电源指示电路,除此之外HL也具有提示保护的作用,当变频器
题目:双闭环直流调速系统的设计与仿真 已知:直流电动机:P N=60KW,U N=220V,I N=305A,n N=1000r/min,λ=2,R a=0.08, R rec=0.1, T m=0.097s, T l=0.012s, T s=0.0017s, 电枢回路总电阻R=0.2Ω。设计要求:稳态无静差,σ ≤5%,带额定负载起动到额定转速的转速超调σn≤10%。(要求完 i 成系统各环节的原理图设计和参数计算)。 系统各环节的原理图设计和参数计算,包括主电路、调节器、电流转速反馈电路和必要的保护等,并进行必要的计算。按课程设计的格式要求撰写课程设计说明书。 设计内容与要求:1、分析双闭环系统的工作原理 2、改变调节器参数,分析对系统动态性能的影响 3、建立仿真模型
1.双闭环直流调速系统的原理及组成 对于正反转运行的调速系统,缩短起,制动过程的时间是提高生产率的重要因素。为此,在起动(或制动)过渡过程中,希望始终保持电流(电磁转矩)为允许的最大值,是调速系统以最大的加(减)速度运行。当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。实际上,由于主电路电感的作用,电流不可能突变,为了实现在允许条件下的最快起动,关键是要获得一段使 电流保持为最大值dmI的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,采用电流负反馈应该能够得到近似的恒流过程。 为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套连接,如图1所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器。从闭环结构上看,电流环在里面,称做内环;转速环在外面,称做外环。这就形成了转速电流负反馈直流调速系统。为了获得良好的静动态性能,转速和电流两个调节器一般采用PI调节器。 2.双闭环控制系统起动过程分析 前面已经指出,设置双闭环控制的一个重要目的就是要获得接近于理想的起动过程,因此在分析双闭环调速系统的动态性能时,有必要先探讨它的起动过程。双闭环调速系统突加给定电压*nU由静止状态起动时,转速和电流的过渡过程如图4所示。由于在起动过程中转速调节器ASR经历了不饱和、饱和、退饱和三
隔爆兼本安型全数字矿井提升机 变频调速电控系统 技术培训 一、目录 ?系统概述 ?系统组成 ?变频调速系统 ?PLC控制系统 ?提升信号系统 一、系统概述 1 ,变频绞车 煤矿井下斜井绞车,以前主要是以交流异步电机转子串电阻调速绞车 (电气拖动),液压绞车(液压拖动)等几种方式为主,但这些设备在安全可 靠性、调速、节能、操作、维护等方面都不同程度的存在缺陷。 串电阻调速主要缺陷有: 1),属于有级调速, 开环运行,因而调速精度低,特别是在出现负力提升 时,要由司机判断速度来人为投入低频或动力制动装置,因而很不安全。 2),转子串入附加电阻后,电机机械特性很软,低速运行时负载稍有变 化转速波动很大。 3),电机低速运行时效率很低,电动机电磁功率中的转差功率全部转化 为转子回路中的铜耗以发热的形式消耗掉,浪费了大量的电能。 4),由于电机转子回路串有大量金属电阻,在运行中电阻散发出大量热 量,造成电阻箱变形失爆。 5),安装大量的金属电阻,大大增加了电控峒室的面积,也大大增加了峒 室的开拓费用。 液压绞车在一定程度上解决了串电阻调速的缺点,但是在使用过程中,发现液压绞车易漏油,噪声大,传动效率低,维修工作量大,液压马达故障率高等问题,这些问题都造成系统后期的运行费用很高,因而液压绞车并不是煤矿安全生产的最佳产品。 防爆变频绞车的问世,使矿井提升机的装备水平发生了质的变化。目前变频绞车已成为市场的主导产品,其主要特点如下: 1),结构紧凑、体积小、移动方便、用于矿山井下可节省大量开拓费用。 2),安全防爆,适用于煤矿井下等含有煤尘,瓦斯或其它易燃易爆气体的场所。 3),变频绞车是以全数字变频调速为基础,以矢量控制技术为核心,使异步电机的调速性能可以与直流电机相媲美。表现在低频转矩大、调速平滑、调速围广、精度高、节能明显等。 4),采用双PLC控制系统,使斜井绞车的控制性能和安全性能更加完善。 5),操作简单、运行安全稳定、故障率低、基本免维护 2 ,用途及适用围 变频绞车电控系统,适用于交流异步电动机(绕线型或鼠笼型)驱动的单滚筒或双滚筒缠绕式绞车。既可以与新安装的绞车配套使用,也适合于对老绞车电控系统的技术改造。 变频绞车电控设备适用于以下场所: 1),海拔高度不超过1000米,如超过这个海拔高度,元器件在功率、容量方面应按海拔高度的增加,适当降容使用。
矿井提升机电控系统原理设计 摘要 我国矿井提升机大多是采用交流异步电机拖动,其电气控制系统采用转子串、切电阻调速,由继电器-接触器构成逻辑控制装置。本文以安全、可靠、高效、经济为出发点,以可靠性原则为依据,对矿井交流提升机电控系统进行研究设计,由可编程控制器(PLC)代替继电器-接触器构成的逻辑控制装置。其中简单介绍了国内外矿井提升机发展概况,提升机机械结构、工作原理,分析了其技术经济性。对于PLC的控制原理及应用做了一般性的介绍。详述了提升机电控系统和调速原理,如:测速部分和保护部分。本文以TKD-NT 单绳缠绕式矿井提升机为例,提出了研究设计方案,并且在实践中成功实施。PLC电控系统实现了对提升过程的程序控制,精度高;实现了速度、电流以及矢量的数字交换等,对提升机进行闭环调节;实现行程、速度等重要参数及提升状态的监视;实现无触点控制,寿命长,可靠性大大提高,具有良好的控制监视系统;实现了显示、记录等有关数据的全部自动化。 关键词:矿井交流提升机,PLC,调速,电控技术研究
THE DESIGN OF ELECTRIC CONTROL SYSTEM BASED ON MINE ELEVATOR ABSTRACT In China, mine elevator whose electric control system uses speed regulation by means of stringing and slicing the rotor resistance, and it constitutes the logic control device by the relay and contactor adopting the means of the drive of AC asynchronous motor in most cases. This paper which studies and designs the electric control system of AC mine elevator, adopting PLC which takes the place of the logic control device constituted by the relay and contactor takes the security, reliability, high efficiency, economy as a starting point, and takes the reliability principle as the basis. There into, this paper gives a brief introduction on the development of mine elevator in home and abroad, its framework and theory, while doing some economic study. Then, it introduces the theory and application of PLC simply. On the side, it goes into particulars about electric control system, for example, speed measurement and safeguard. This paper sets TKD-NT elevator for an example, proposes the research and design plan which puts in practice successfully. The electric control system based on PLC has carried out the procedure control of hoist process and high accuracy, closed-cycle control of mine elevator through speed, electric current as well as digital switching of vector and so on, the monitor of important parameters such as the distance of travel, speed, the state of hoist. In addition, the system also has carried out contact less control, long life-span, reliability greatly improved, good control supervisory system and completely automation of relevant data’s demonstration, recording and so on. KEY WORDS: AC mine elevator, PLC, speed regulation, electric control
转速、电流双闭环调速系统 班级:铁道自动化091 姓名:陈涛 指导老师:严俊 完成日期:2011-10-31 湖南铁道职业技术学院
目录 摘要 (3) 一、直流调速介绍 (4) 1、调速定义 (4) 2、调速方法 (4) 3、调速指标 (4) 二、双闭环直流调速系统介绍 (5) 1、转速、电流双闭环调速系统概述 (5) 2、转速、电流双闭环调速系统的组成 (6) 3、PI调节器的稳态特征 (7) 4、起动过程分析 (8) 5、动态性能 (11) 6、两个调节器的作用 (11) 三、总结 (12)
摘要 随着近代电力电子技术和计算机的发展以及现代控制理论的应用,自动化电力拖动正向着计算机控制的生产过程自动化的方向迈进,以达到高速、优质、高效率地生产。在大多数综合自动化系统中,自动化的电力拖动系统仍然是不可缺少的组成部分。 本文讲述的是转速、电流双闭环直流调速系统,通过学习使我对转速、电流双闭环直流调速系统的组成、调速器的稳态特性和作用以及系统的动态特性有了一定的了解。该系统是在单闭环系统的基础上加以改进后完成的,通过对电力拖动自动控制系统的学习,我们里了解到转速、电流双闭环直流调速系统相对于单闭环调速系统的一些优势,它是通过转速反馈和电流反馈两个环节分别起作用的。 通过这次的学习,我懂得了很多,具有了通过运用理论上所掌握的知识来独立发现问题、思考问题、解决问题的能力,在这次的论文中,我有一次重新学习了转速、电流双闭环直流调速系统,使我这一系统有了更进一步的了解。
转速、电流双闭环调速系统 一、直流调速介绍 1、调速定义 调速是指在某一具体负载情况下,通过改变电动据或电源参数的方法,使机械特性曲线得以改变,从而使电动机转速发生变化或保持不变。 2、调速方法 1.调节电枢供电电压U。改变电枢电压主要是从额定电压往下降低电枢电压,从电动机额定转速向下变速,属恒转矩调速方法。对于要求在一定范围内无 级平滑调速的系统来说,这种方法最好。变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。 2.改变电动机主磁通。改变磁通可以实现无级平滑调速,但只能减弱磁通进行调速(简称弱磁调速),从电机额定转速向上调速,属恒功率调速方 法。变化时间遇到的时间常数同变化遇到的相比要大得多,响应速度较慢,但所需电源容量小。 3.改变电枢回路电阻 <。在电动机电枢回路外串电阻进行调速的方法,设备简单,操作方便。但是只能进行有级调速,调速平滑性差,机械特性较软;空载时几乎没什么调速作用;还会在调速电阻上消耗大量电能。 3、调速指标 1.调速范围(包括:恒转矩调速范围/恒功率调速范围),
目录页 第一章绪论 (2) 1-1课题背景,实验目的与实验设备 (2) 1-2国内外研究情况 (3) 第二章双闭环调速系统设计理论 (3) 2-1典型Ⅰ型和典型Ⅱ型系统 (3) 2-2系统的静,动态性能指标 (4) 2-3非典型系统的典型化 (6) 2-4转速调节器和电流调节器的设计 (7) 第三章模型参数测定和模型建立 (9) 3-1系统模型参数测定实验步骤和原理 (9) 3-2模型测定实验的计算分析 (11) 3-3系统模型仿真和误差分析 (18) 第四章工程设计方法设计和整定转速,电流反馈调速系统 (22) 4-1 设计整定的思路 (22) 4-2 电流调节器的整定和电流内环的校正,简化 (23) 4-3转速调节器的整定和转速环的校正,简化 (25) 4-4系统的实际运行整定 (27) 4-5 关于ASR和ACR调节器的进一步探讨…………………………………… 33 第五章设计分析和心得总结 (34)
5-1实验中出现的问题 (34) 5-2实验心得体会 (35) 第六章实验原始数据 (38) 6-1建模测定数据 (38) 6-2 系统调试实验数据 (39) 第一章绪论 1-1课题背景,实验目的与实验设备 转速,电流反馈控制的调速系统是一种动静态特性优良的直流调速系统,它的控制规律是建立在经典控制规律的基础上的,用传递函数建立动态数学模型,并从传递函数模型和开环频域特性去总结其控制规律,用跟随和抗扰两个方面的指标去衡量它的动静态性能。转速,电流反馈控制的调速系统是一种串级系统,所以其整定系统参数的方法也借鉴了一般串级系统的差别,但又有不同于一般串级系统的。 本次实验的主要目的是针对一套调速系统(包括电源,电机,励磁回路等)建立模型并整定出带滤波的电流调节器和转速调节器参数,投入运行。实验正值暑期实践及国际交流周,我们将用两周的时间来完成参数测定实验,系统建模,调节器整定和系统投入运行。 本次实验的实验设备包括:
毕业设计(论文) 题目:矿井提升机设计 姓名:饶祖文 2015年9月20日
摘要 毕业设计是培训学生综合运用本专业所学的理论和专业知识,用来分析和解决实际问题的能力的重要教学环节,对三年所学知识的复习与巩固。同样,也促使了同学们之间的相互探讨,相互学习。因此,我们必须认真、谨慎、塌实、一步一步的完成设计,给我们三年的学习生涯画上一个圆满的句号。 毕业设计是一个重要的教学环节,通过毕业实习使我们了解到一些实际与理论之间的差异。通过毕业设计,不仅可以巩固专业知识为以后的工作打下坚实的基础,而且还可以培养和熟练地使用资料、运用工具书的能力,在各位老师及有关技术人员的指导下锻炼自己独立思考、分析、解决问题的能力,把我们所学的课本知识与实践相结合起来,起到温故而知新的作用。在毕业设计过程中,我们要较系统地了解矿井提升设计中的每一个环节,包括从总体设计原则。本次设计综合三年所学的专业课程,以《设计任务书》的指导思想为中心,参照有关资料,有计划、有头绪、有逻辑地把这次设计搞好! 由于时间仓促,再加上所学知识有限,设计中,难免出现错误或不当之处,恳请各位教师给予一定的批评和建议,我表示非常感激,并诚恳地接受,以便将来在不断的商讨和探索中,有更好的改进,以便在今后的人生道路上,不断完善。
目录 第1章绪论 (1) 1.1国内外提升机的研究状况 (1) 1.2课题研究的目的和意义 (4) 1.3本论文承担的任务 (8) 1.4小结 (10) 第2章矿井提升机的组成及分类 (11) 2.1科技名词定义 (11) 2.2矿井提升机的组成 (11) 2.3矿井提升机的分类 (11) 第3章矿井提升机的制动装置与安全装置 (13) 3.1矿井提升机的制动装置 (13) 3.1.1制动装置的组成及种类 (13) 3.1.2制动装置的作用 (13) 3.1.3《煤矿安全规程》对制动力矩的规定 (13) 3.1.4制动装置的有关规定 (14) 3.2矿井提升机的安全保护装置 (14) 3.2.1提升机机房的管理 (15) 3.2.2设备电气火灾的预防措施 (14) 3.2.3提升机机房的保安措施 (16) 3.2.4井下提升机电控制室对风量和温度的具体要求 (16) 3.2.5斜井(巷)提升,常用的跑车防护装置及设施类型 (16) 第4章提升机调速控制系统硬件实现 (17) 4.1引言 (17) 4.2提升机电控系统总体结构 (17) 4.3提升机电控制系统变频器的选择 (18) 4.4变频控制部分设计 (19) 4.4.1变频调速主系统设计 (19) 4.4.2变频器外电路设计 (21) 4.5PLC 控制部分设计 (25) 4.5.1基本控制功能 (25) 4.5.2位置检测电路 (28) 4.6硬件调速控制系统保护措施 (29) 4.6.1调速控制系统抗干扰处理 (30) 4.7小结 (33) 第5章提升机调速控制系统软件实现 (31)
摘要 矿井被称作地下矿井系统的咽喉,是井下与地面最重要的通道。矿井提升机承担着矿井与井下人员、矿料、设备等物资运输的重任,是整个矿井系统中的核心部分,矿井提升机的安全可靠运行至关重要。所以设计一套安全可靠的矿井提升机控制系统具有极大的意义。PLC出现后以其显着优点迅速成为工业生产控制系统的主流发展方向,其可靠性高,抗干扰能力强;编程简单,使用方便;控制程序可变,具有很好的柔性功能完善;扩充方便,组合灵活,极大减少控制系统设计及施工工作量;体积小,重量轻;非常适用“机电一体化”设备。基于PLC 设计矿井提升机控制系统,极大满足对大型机械控制安全与可靠性的要求,且节能环保,便于操作与维护。 关键词:矿井提升机;PLC;控制系统。 Abstract The mine is called the throat of the underground mine, which is the most important channel of the underground mine. The mine hoist bears the heavy responsibility of the mine and the underground personnel, the ore material, equipment and so on. It is the core part of the entire mine system, and the safe and reliable operation of the mine hoist is very important. Therefore, it is of great significance to design a safe and reliable control system of mine hoist. PLC appears with its remarkable advantages quickly become industrial production control system of the mainstream of the development direction of, the high reliability, strong anti-interference ability; programming is simple, easy to use; variable control procedures, with perfect good flexible function; to facilitate the expansion, flexible combination, greatly reducing the control system design and construction work; has the advantages of small volume, light weight; very applicable electromechanical integration equipment. Design of mine hoist control system based on PLC, which greatly meets the requirements of safety and reliability of large mechanical control, and energy saving and environmental protection, easy to operate and maintain. Key words: mine hoist; PLC; control system. 目录 中文摘要......................................... .. (Ⅲ) 英文摘要......................................... .. (Ⅲ) 目录 (Ⅴ) 1 绪论 (1)
提升机电控系统 一、提升机控制系统组成 本系统装置适用于煤矿等行业的提升机控制。对现在沿用的TKD系统进行技术改造或控制设备更新尤为适用。 (1)使用范围 ①环境温度-5℃-+40℃ ②相对湿度不超过90%(+20℃) ③其周围环境空气中没有导电尘埃和绝缘材料的气体和微粒,无爆炸性气体和煤尘; ④没有剧烈振动、冲击的场所 ⑤没有高温、结霜、雨淋的场所 二、矿井提升机控制系统的功能 (1)手动和半自动功能 系统有手动和半自动两种运行功能,在半自动状态下,提升机的启动由主令手动给定速度,等运行到变坡点后通过司机按半自动运行按钮实现半自动运行,半自动运行时等速、减速及停车按预先设定的速度图运行;在手动状态下,提升机在操作司机的控制下运行。 (2)半自动验绳、半自动检修运行功能、应急开车方式 验绳时提升机的速度由PLC数字输出给变频器一个恒速(0.37m/s)运行命令,设备的起停和方向由司机操纵主令手柄控制。 半自动检修运行时,提升机的速度由PLC数字输出给变频器一个恒速(0.37m/s)运行命令,设备的起停和方向由司机操纵主令手柄控制。 应急开车只用在有一套PLC系统发生故障时运行。此时系统完全由一台PLC控制且各种保护具备,绞车能在限定的速度(0.37m/s)下由司机手动完成本次提升。 (3)测速及容器位置指示 安装在提升机上的两个轴编码器输出的数字脉冲与主电动机的转速成正比,一个用于提升机速度和行程的显示,另一个用于速度保护,两个轴编码器相互监测,如果一个失效,将切换到另一个进行提升机速度和行程的显示和速度保护。 (4)保护及联锁功能 ①首次上电或故障时安全继电器断电后,只有提升机在主令零位紧闸位才能再次接通安全继电器,当有故障时安全继电器断电后,配合液压站安全阀使提升机实现一级或二级制动;,工作闸继电器及制动油泵等控制回路断电,使制动油压降为零。 ②任何情况下,只有提升机在主令零位紧闸位才能接收到开车信号,只有当司机接到开车信号后,才能起动提升机使其运行。 ③当提升过程中发生润滑油压力过高、过低,润滑油温高、液压站油温高时、上位机和操作台上均有相应的一次提升故障信息显示,点亮相应信号灯,告知司机可以完成本次提升工作。当故障解除后才允许司机进行下一次提升工作。 ④当提升机因发生故障在中途停车,工控机上有相应的故障信息显示,排除故障后允许司机选择方向开车。 ⑤全矿停电时,由PLC保证提升机能实现二级制动,并作好提升机的后备保护。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ 目录 1 绪论 (1) 1.1课题研究背景 (1) 1.2研究双闭环直流调速系统的目的和意义 (1) 2 直流电机双闭环调速系统 (3) 2.1直流电动机的起动与调速 (3) 2.2直流调速系统的性能指标 (3) 2.2.1静态性能指标 (3) 2.2.2动态的性能指标 (4) 2.3双闭环直流调速系统的组成 (6) 3 双闭环直流调速系统的设计 (8) 3.1电流调节器的设计 (8) 3.2转速调节器的设计 (10) 3.3闭环动态结构框图设计 (12) 3.4设计实例 (12) 3.4.1设计电流调节器 (13) 3.4.2设计转速调节器 (15) 4.Matlab仿真 (17) 4.1仿真结果分析 (19) 5 结论 (20) 参考文献 (21)
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊1 绪论 1.1课题研究背景 直流调速是现代电力拖动自动控制系统中发展较早的技术。就目前而言,直流调速系统仍然是自动调速系统的主要形式,电机自动控制系统广泛应用于机械,钢铁,矿山,冶金,化工,石油,纺织,军工等行业。这些行业中绝大部分生产机械都采用电动机作原动机。有效地控制电机,提高其运行性能,对国民经济具有十分重要的现实意义。 以上等等需要高性能调速的场合得到广泛的应用。然而传统双闭环直流电动机调速系统多数采用结构比较简单、性能相对稳定的常规PID控制技术,在实际的拖动控制系统中,由于电机本身及拖动负载的参数(如转动惯量)并不像模型那样保持不变,而是在某些具体场合会随工况发生改变;与此同时,电机作为被控对象是非线性的,很多拖动负载含有间隙或弹性等非线性的因素。因此被控制对象的参数发生改变或非线性特性,使得线性的常参数的PID控制器往往顾此失彼,不能使得系统在各种工况下都保持与设计时一致的性能指标,常常使控制系统的鲁棒性较差,尤其对模型参数变化范围大且具的非线性环节较强的系统,常规PID调节器就很难满足精度高、响应快的控制指标,往往不能有效克服模型参数变化范围大及非线性因素的影响。 1.2研究双闭环直流调速系统的目的和意义 双闭环直流调速系统是性能很好,应用最广的直流调速系统。采用该系统可获得优良的静、动态调速特性。此系统的控制规律,性能特点和设计方法是各种交、直流电力拖动自动控制系统的重要基础。 20世纪90年代前的大约50年的时间里,直流电动机几乎是唯一的一种能实现高性能拖动控制的电动机,直流电动机的定子磁场和转子磁场相互独立并且正交,为控制提供了便捷的方式,使得电动机具有优良的起动,制动和调速性能。尽管近年来直流电动机不断受到交流电动机及其它电动机的挑战,但至今直流电动机仍然是大多数变速运动控制和闭环位置伺服控制首选。因为它具有良好的线性特性,优异的控制性能,高效率等优点。直流调速仍然是目前最可靠,精度最高的调速方法。 通过对转速、电流双闭环直流调速系统的了解,使我们能够更好的掌握调速系统的基本理论及相关内容,在对其各种性能加深了解的同时,能够发现其缺陷之处,通过对该系统不足之处的完善,可提高该系统的性能,使其能够适用于各种工作场合,提高其使用效率。并以此为基础,再对交流调速系统进行研究,最终掌握各种交、直流调速系统的原理,使之能够应用于国民经济各个
第六章 交流异步电动机变压变频调速系统 本章主要问题: 1. 在变频调速中变频时为什么要保持压频比恒定? 2. 交-直-交电压源型变频器调压、调频的有哪几种电路结构,并说明各种电压结构的优缺点。 3. SPWM 控制的思想是什么? 4. 什么是1800导通型变频器?什么是1200导通型变频器? 5. 电压、频率协调控制有几种控制方式,各有哪些特点? 6. 在转速开环恒压频比控制系统中,绝对值单元GAB 的作用?函数发生器GFC 的作用?如 何控制转速正反转。 7. 总结恒11 ωU 、恒1ωg E 、恒1ωr E 三种控制方式的特点。 ———————————————————————————————————————— §6-1 交流调速的基本类型 要求:掌握交流调速哪几种基本类型有以及各种调速方法的特点。 目的:能根据不同应用场合选择出相应的调速方式。 重点、难点:变频调速时基频以下和基频以上调速的特点 主要内容(交流调速的基本类型、变频调速的基本要求) 思考: 1. 交流异步电动机调速的方式有哪几种?并写出各方式的优缺点? 2. 在变频调速中变频时为什么要保持压频比恒定? 教学设计:交流调速的基本类型采用多媒体课件讲授,用大量的实例,说明几种类型的应用场合。 复习感应电动机转速表达式: )1(60)1(1 0s n f s n n p -= -= 异步电动机调速方法:?? ?? ??? ?????? ? ??型变频调速:绕线式、笼:绕线式串级调速(转差电压)电磁转差离合器调转子电阻:绕线式、调压(定子电压)变转差率调速变极调速:笼型异步机异步电动机 §6-2 变频调速的构成及基本要求 目的、教学要求:掌握变频调速时基频以下和基频以上调速的特点 重点、难点:变频调速时基频以下和基频以上调速的特点 主要内容(变频调速的基本要求)
学士学位论文 矿井提升机直流电控系统设计 作者姓名:董佩 导师姓名:张开如 专业名称:自动化 所在学院:信息与电气工程学院 山东科技大学 2009年6月
摘要 矿井直流提升机电控系统由直流电动机、卷筒、制动系统、深度指示系统、测速限速系统和操作系统等组成。与传统提升机电控系统相比,该系统具有单机容量大、体积小、重量轻、起动平滑性好、调速范围宽、精度高和安全可靠性高等优点。本文主要介绍该系统的硬件电路设计、保护电路的设计和系统的工作原理。 根据课题的设计要求,本系统从主电路结构的选择和计算、控制方案的选择、保护电路的设计和系统的动静态特性的分析计算等方面出发,进行矿井直流提升机电控系统的设计。该系统能完成对矿井直流提升机的起动、加速运行、匀速运行、减速运行和回馈制动的控制,并且可以实现提升机的四象限运行。 关键词:提升机电控系统磁场可逆逻辑无环流
ABSTRACT The mine DC hoist electric control system consists of the DC motor, drum, brake system, in-depth instruction systems, gun systems and operating systems and so on. With the traditional mechanical and electrical control system upgrade; this system has a single large capacity, small size, light weight, a good smooth start-up feature, high precision and high security and reliability. This paper describes hardware circuit design, protection circuit design and the working principle of the system. In accordance with the design requirements of the subject, the design of the mine DC hoist electric control system is from the choice and calculation of the main circuit of the system, the choice of the control program, the design of the protection system and system analysis and calculation of static and dynamic characteristics. The system is able to complete the start, the running of speed up, uniform running, deceleration running and feedback control, furthermore it can run in the four quadrants. Key words:Hoist The electric control system Reversible magnetic field The logic of non-circulation
摘要 近些年来,随着现代电力电子技术、计算机技术和自动控制技术的迅速发展,交流传动与控制技术成为目前发展最为迅速的技术之一,电气传动技术面临着一场历史革命,即交流调速取代直流调速和计算机数字控制技术取代模拟控制技术已成为发展趋势。变频调速技术的迅速发展被越来越多的应用于电机控制领域中,是当今节电、改善工艺流程以提高产品质量和改善环境、推动技术进步的一种主要手段。变频调速以其优异的调速和起制动性能,高效率、高功率因数和节电效果,以及广泛的适用范围和调速时因转差功率不变而无附加能量损失等优点而被国内外公认为是最有发展前途的高效调速方式。所以,对交—直—交变频调速系统的基本工作原理和特性的研究是十分有积极意义的。 本文研究了变频调速系统的基本组成部分,主回路主要有三部分组成:将工频电源变换为直流电源的“整流器”;吸收由整流器和逆变器回路产生的电压脉动的“滤波回路”,也是储能回路;将直流功率变换为交流功率的“逆变器”。以Matlab/Simulink为仿真工具,搭建交—直—交变频调速系统的仿真模型,并对仿真结果进行分析研究。通过仿真试验对该交—直—交变频调速系统的基本工作原理、工作特性及作用有更深的认识,也对谐波对于交—直—交变频调速系统的影响有了一定的了解。 第一章绪论 1.1 交流调速技术发展概况 在很长的一个历史时期内,直流调速系统以其所具有优良的静、动态性能指标垄断调速传动应用领域。但是随着生产技术的不断发展,直流电机的缺点逐步显示出来,由于机械式换向器的存在使直流电机的维护工作量增加并限制了电机容量、电压、电流和转速的上限值,加之故障率高、效率低、成本高、使用环境受限等缺点,使其在一些大容量的调速领域中无法应用。 而异步电动机特别是鼠笼异步电动机,容量、电压、电流和转速的上限,不像直流电动机那样受限制。而且异步电动机的转子绕组不需与其他电源相连,其
闽南师范大学 PLC课程设计 课题:基于PLC模拟量的变频器闭环调速控制 姓名: 学号: 1205000529 系别:物理与信息工程学院 专业:电气工程及其自动化 年级: 12级电气1班 指导教师:洪清辉 2015年5月18日
目录 1 引言 (3) 2 系统设计 (3) 2.1 设计目的 (3) 2.2 设计要求 (3) 2.3 设计思路 (3) 2.4 系统硬件配置及组成原理 (4) 2.5变频器 (7) 2.5.1变频器主要功能 (7) 2.5.2 变频器平面图 (7) 2.6 同轴编码器 (7) 3 硬件接线图 (8) 4 软件设计 (8) 4.1 软件流程图 (8) 4.2梯形图 (8) 5 应用扩展------基于PLC模拟量的矿井通风系统 (10) 5.1设计内容 (10) 5.2设计实现目标 (10) 5.3控制系统设计 (11) 5.3.1控制程序流程图设计 (11) 5.3.1控制程序设计思路 (11) 6心得体会 (11) 7 参考文献 (12)
摘要 一种基于FX2NPLC控制的变频调速的闭环控制系统及其在液位控制中的应用,在电机速度闭环控制中,由同轴编码器对电机测速,经PLC内部A/D转换后与给定值比较再由PID运算控制得出的值经D/A转换后输出给变频器,从而闭环控制电机的转速。 关键词:plc 模拟量变频器 1 引言 随着变频调速技术的应用日益广泛,应用水平的不断提高,对变频调速控制系统的精度要求也越来越高。目前,许多变频调速装置属于开环控制方式,不能满足有较高精度的控制要求。为提高开环变频调速器控制精度,本系统采用有编码器速度检测的、由高性能FX2NPLC 调节控制的闭环系统。 2 系统设计 2.1 设计目的 1.利用可编程控制器及其模拟量模块,通过对变频器的控制,实现电机的闭环调速。 2.了解可编程控制器在实际工厂生产中的应用及可编程控制器的编程方法。 2.2 设计要求 电机的实际转速在较快的时间内接近给定目标转速,并且能够稳定运行。当改变给定速度时,电机能快速响应达到接近给定值。 2.3 设计思路 变频器控制电机,电机上同轴连旋转编码器。编码器根据电机的转速变化而输出电压信号Vil 反馈到PLC模拟量模块(Fx2n-3A)的电压输入端,在PLC 内部给定量经过运算处理后,通过PLC模拟量模块的电压输出端输出一路DC0~+10V电压信号Vout来控制变频器的输出,达到闭环控制的目的。 运算方案一: 采用数学运算,当反馈值小于给定值时,让控制信号Vout加适当值。同理,当反馈量大于给定值时,用软件给控制信号减适当值。