诚信保证
本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。 本人签字: 编号:
西北工业大学考试试卷(A 卷)
2005-2006 学年第 1学期
开课学院电子信息学院课程脉冲数字电路学时80 考试日期 2005-12-26考试时间2小时考试形式(闭开)(B
A )卷
2. 命题教师和审题教师姓名应在试卷存档时填写。 (A 卷) 共8页 第1页
2015年《自然辩证法概论》试题及解答 1.马克思恩格斯科学技术思想的基本内容? 答:一、科学技术的定义:马克思、恩格斯认为,科学建立在实践基础之上,是人们批判宗教和唯心主义的精神武器,是人们通过实践对自然的认识与解释,是人类对客观世界规律的理论概括,是社会发展的一般精神产品;技术在本质上体现了人对自然的实践关系。 二、基本内容如下: (1)科学的分类恩格斯对自然科学进行了分类。每一门科学都是分析某一个别的运动形式或一系列相互转化的运动形式,因此,科学分类就是这些运动形式本身依据其内部所固有的次序的分类和排列,而它的重要性也正是在这里。恩格斯将自然科学的研究对象规定为运动着的物体,并将科学分为数学、天文学、物理学、化学、生物学等。 (2)科学技术与哲学的关系恩格斯强调科学技术对哲学的推动作用,认为推动哲学家前进的,主要是自然科学和工业的强大面日益迅猛的进步。科学的发展也受到哲学的制约和影响。科学与哲学在研究对象上具有本质上的共同点和内在的一致性。科学研究作为一种认识活动,必须通过理论思维才能揭示对象的本质和规律,这就自然地与哲学发生紧密的关系。 (3)科学技术是生产力马克思提出了科学是生产力的思想,他认为,社会生产力不仅以物质形态存在,而且以知识形态存在,自然科学就是以知识形态为特征的一般社会生产力。 (五)科学技术的生产动因马克思认为自然科学本身的发展,“仍然是在资本主义生产的基础上进行的,这种资本主义生产第一次在相当大的程度上为自然科学创造了进行研究、观察、实验的物质手段。”恩格斯认为近代以来科学“以神奇的速度发展起来,那么,我们要再次把这个奇迹归功于生产。” (六)科学技术的社会功能科学革命的出现,打破了宗教神学关于自然的观点,自然科学从神学中解放出来,从些快速前进。科学与技术的结合,推动了产业革命,产业革命促使市民社会在经济结构和社会生产关系上了发生了全面变革。 马克思认为,科学技术的发展,首先必然引起生产方式的变革,也必然引起生产关系本身的变革。 (七)科学技术与社会制度马克思、恩格斯首先揭示了新兴资产阶级与自然科学的关系。其次揭示了资本主义制度下劳动者与科学技术的关系。再次,预见了只有在劳动中,科学才起到它真正的作用。同时也肯定了科学家个人在科学发展史上的重要作用。
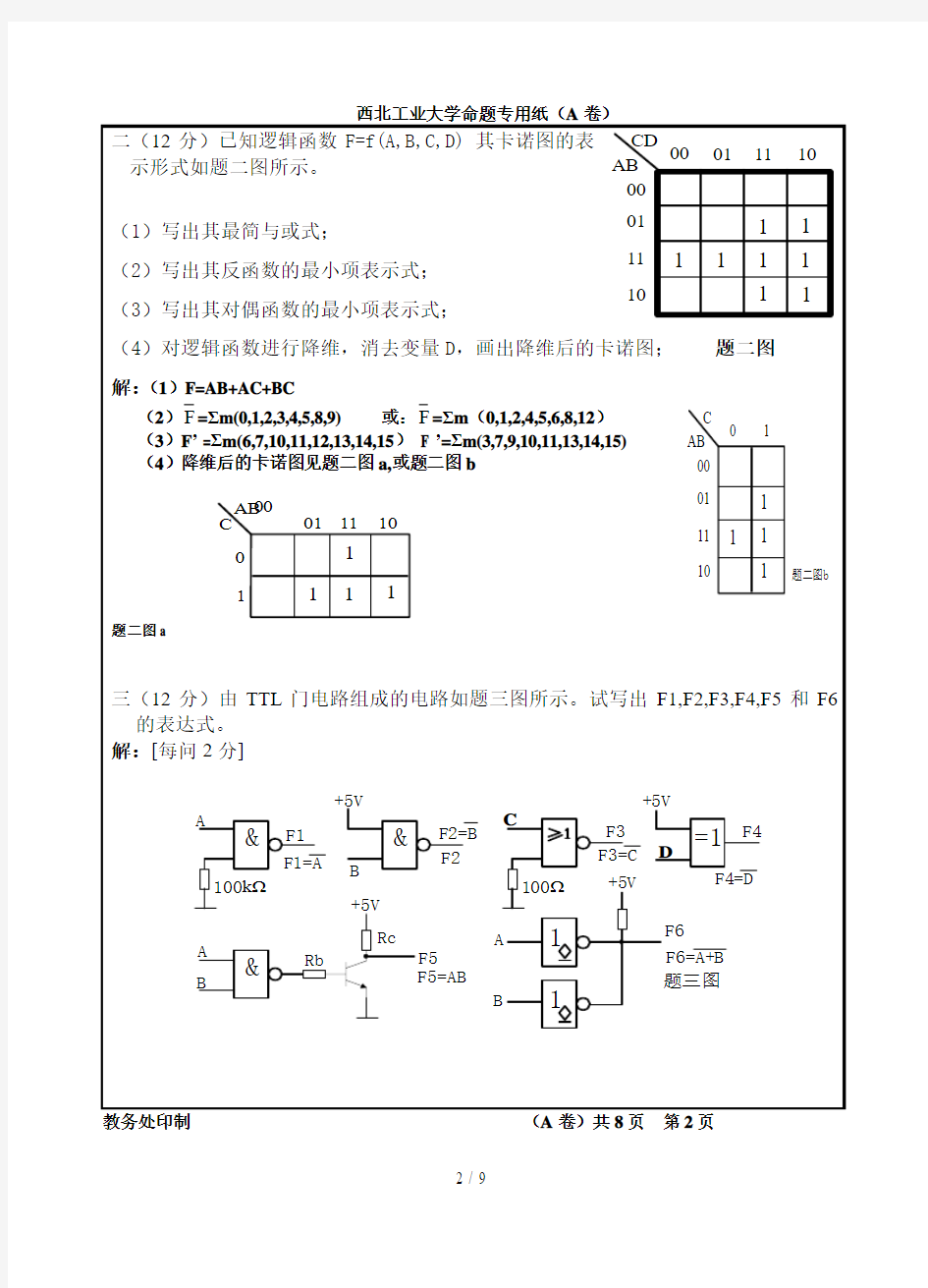
1.针对下图所示的3个三角形元,写出用完整多项式描述的位移模式表达式。 2.如下图所示,求下列情况的带宽: a) 4结点四边形元; b) 2结点线性杆元。 3.对上题图诸结点制定一种结点编号的方法,使所得带宽更小。图左下角的四边形在两种不同编号方式下,单元的带宽分别是多大? 4.下图所示,若单元是2结点线性杆单元,勾画出组装总刚后总刚空间轮廓线。系统的带宽是多大?按一右一左重新编号(即6变成3等)后,重复以上运算。 5. 设杆件1-2受轴向力作用,截面积为A ,长度为L ,弹性模量为E ,试写出杆端力F 1,F 2与杆端位移21,u u 之间的关系式,并求出杆件的单元刚度矩阵)(][e k 6.设阶梯形杆件由两个等截面杆件○ 1与○2所组成,试写出三个结点1、2、3的结点轴向力F 1,F 2,F 3与结点轴向位移321,,u u u 之间的整体刚度矩阵[K]。 7. 在上题的阶梯形杆件中,设结点3为固定端,结点1作用轴向载荷F 1=P ,求各结点的轴向位移和各杆的轴力。 8. 下图所示为平面桁架中的任一单元,y x ,为局部坐标系,x ,y 为总体坐标系,x 轴与x 轴的夹角为θ。 (1) 求在局部坐标系中的单元刚度矩阵 )(][e k (2) 求单元的坐标转换矩阵 [T]; (3) 求在总体坐标系中的单元刚度矩阵 )(][e k 9.如图所示一个直角三角形桁架,已知27/103cm N E ?=,两个直角边长度cm l 100=,各杆截面面积210cm A =,求整体刚度矩阵[K]。 10. 设上题中的桁架的支承情况和载荷情况如下图所示,按有限元素法求出各结点的位移与各杆的内力。 11. 进行结点编号时,如果把所有固定端处的结点编在最后,那么在引入边界条件时是否会更简便些? 12. 针对下图所示的3结点三角形单元,同一网格的两种不同的编号方式,单元的带宽分别是多大? 13. 下图所示一个矩形单元,边长分别为2a 与2b ,坐标原点取在单元中心。
第四章 平面机构的力分析 题4-7 机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=d r d r F F M M //=。试求图示各机构在图示位置时的机械效益。图a 所示为一铆钉机,图b 为一小型压力机,图c 为一剪刀。计算所需各尺寸从图中量取。 (a ) (b) (c) 解:(a)作铆钉机的机构运动简图及受力 见下图(a ) 由构件3的力平衡条件有:02343=++R R r F F F 由构件1的力平衡条件有:04121 =++d R R 按上面两式作力的多边形见图(b )得 θcot ==?d r F F (b )作压力机的机构运动简图及受力图见(c ) 由滑块5的力平衡条件有:04565=++R R F F G 由构件2的力平衡条件有:0123242 =++R R R 其中 5442R R = 按上面两式作力的多边形见图(d ),得t F G = ? (c) 对A 点取矩时有 b F a F d r ?=? a b =? 其中a 、b 为F r 、F d 两力距离A 点的力臂。t F G = ?
(d) (a) (b)d r R41 F R43 F d G 题4-8 在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(为常数),活塞及其附件的重量G3=21N,连杆质量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离l BS2=l BC/3。试确定在图示位置时活塞的惯性力以及连杆的总惯性力。 解:1) 选定比例尺, 绘制机构运动简图。(图(a) ) 2(b) 4-1 (c) 3) 确定惯性力 活塞3 连杆2 (顺时针) (图(a) )
西北工业大学考试试题(A卷) 2004 - 2005 学年第一学期 一、填空题:(每题 3 分,共计 30 分) 1. 塑性是指: ________________________________________________________ ________________________________________________ 。 2. 金属的超塑性可分为 _____ 超塑性和 _____ 超塑性两大类。 3. 金属单晶体变形的两种主要方式有: _____ 和 _____ 。 4. 影响金属塑性的主要因素有: _____ , _____ , _____ , _____ , _____ 。 5. 等效应力表达__________________________________________________ 。 6. 常用的摩擦条件及其数学表达式: __________________________________ ,__________________________________ 。 7. π平面是指: _____________________________________________________ ______________________________________________________________ _。 8. 一点的代数值最大的 __________ 的指向称为第一主方向,由第一主方 向顺时针转所得滑移线即为 _____线。 9. 平面变形问题中与变形平面垂直方向的应力σz=______________________ 10. 在有限元法中:应力矩阵 [S]= ________________________ , 单元内部各点位移{U}=[ ]{ } 二、简答题(共计 30 分) 1. 提高金属塑性的主要途径有哪些?( 8 分) 2. 纯剪切应力状态有何特点?( 6 分) 3. 塑性变形时应力应变关系的特点?( 8 分) 4. Levy-Mises 理论的基本假设是什么?( 8 分) 三、计算题(共计 40 分) 1 、已知金属变形体内一点的应力张量为Mpa ,求:( 18 分)(1)计算方向余弦为 l=1/ 2 , m=1/2 , n= 的斜截面上的正应力大小。(2)应力偏张量和应力球张量;
第3章课后习题参考答案 3—1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点? 答:参考教材30~31页。 3—2 何谓三心定理?何种情况下的瞬心需用三心定理来确定? 答:参考教材31页。 3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a) (b) 答:
答: (10分) (d) (10分) 3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
答:1)瞬新的数目: K=N(N-1)/2=6(6-1)/2=15 2)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置 3) ω1/ω3= P 36P 13/P 16P 13=DK/AK 由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。 3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求: 1)当φ=165°时,点的速度vc ; 2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3)当V C =0时,φ角之值(有两个解)。 解:1)以选定的比例尺μ机械运动简图(图b ) 2)求vc 定出瞬心p12的位置(图b ) 因p 13为构件3的绝对瞬心,则有 ω3=v B /lBp 13=ω2l AB /μl .Bp 13=10×0.06/0.003× v c =μc p 13ω3=0.003×52×2.56=0.4(m/s) 3)定出构件3的BC 线上速度最小的点线上速度最小的点必与p13点的距离 最近,故丛p13引BC 线的垂线交于点 v E =μl.p 13E ω3=0.003×46.5×
诚信保证 本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。本人签字: 编号: 西北工业大学考试试题(卷) 2008-2009学年第1学期 开课学院航天学院课程航天器飞行力学学时 48 考试日期考试时间 2小时考试形式(闭)(A)卷题号一二三四五六七八九十总分得分 考生班级 2162、2163 学 号姓 名 一、名词解释(20分) 1、比冲 2、过载 3、二体问题 4、轨道摄动 5、星下点轨迹 6、临界轨道 7、顺行轨道 8、轨道转移 9、再入走廊 10、总攻角 注:1. 命题纸上一般不留答题位置,试题请用小四、宋体打印且不出框。 2. 命题教师和审题教师姓名应在试卷存档时填写。共2页 第1页
西北工业大学命题专用纸 二、简述(20分) 1、直接反作用原理 2、刚化原理(关于变质量物体质心运动方程和绕质心转动方程的描述) 3、瞬时平衡假设 4、开普勒三大定律 三、简答题(40分) 1、火箭产生控制力和控制力矩的方式有那些?写出各自的控制力和控制力矩计 算公式。 2、在什么条件下,一般空间弹道方程可以分解成纵向运动方程和侧向运动方 程? 3、自由飞行段的运动有哪些基本特征、轨迹是什么形状、特征参数有哪些、特 征参数与主动段终点参数有什么关系? 4、轨道要素有哪些,其意义和作用是什么? 5、卫星轨道的摄动因素有那些? 6、双椭圆轨道机动的特征速度的确定方法? 7、基于状态转移矩阵的双脉冲轨道机动的过程和特征速度的求解方法? 8、航天器再入轨道有哪些类型,各有什么特点? 四、推导题(20分) 1、推导齐奥尔柯夫斯基公式(理想速度与质量变化的关系) 2、推导二体问题基本方程 教务处印制 共2页 第2页
第三章 平面机构的运动分析 题3-3 试求图示各机构在图示位置时全部瞬心的位置(用符号P ij 直接标注在图上) 解: 1 P 13(P 34)13 ∞ 题3-4 在图示在齿轮-连杆机构中,试用瞬心法求齿轮1与齿轮3 的传动比w1/w3. P 13 P 23 P 36 3 D 6 52 C 4 B P 16A 1 P 12 解:1)计算此机构所有瞬心的数目 152 ) 1(=-=N N K 2)为求传动比31ωω需求出如下三个瞬心16P 、36P 、13P 如图3-2所示。 3)传动比31ω计算公式为: 13 1613 3631P P P P =ωω 题3-6在图a 所示的四杆机构中,l AB =60mm ,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求:
23 1) 当φ=165°时,点C 的速度Vc ; 2) 当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3) 当Vc=0时,φ角之值(有两个解) 解:1) 以选定比例尺,绘制机构运动简图。(图3-3 ) 2)求V C ,定出瞬心P 13的位置。如图3-3(a ) s rad BP l l v l AB AB B 56.213 23=== μωω s m CP v l C 4.0313==ωμ 3)定出构件3的BC 线上速度最小的点E 的位置。 因为BC 线上速度最小的点必与P 13点的距离最近,所以过P 13点引BC 线延长线的垂线交于E 点。如图3-3(a ) s m EP v l E 375.0313==ωμ 4)当0=C v 时,P 13与C 点重合,即AB 与BC 共线有两个位置。作出0=C v 的两个位置。 量得 ?=4.261φ ?=6.2262φ 题3-12 在图示的各机构中,设已知各构件的尺寸、原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3上C 点的速度及加速度。
西北工业大学POJ答案 绝对是史上最全版(不止100题哦……按首字母排序) 1.“1“的传奇 2.A+B 3.A+BⅡ 4.AB 5.ACKERMAN 6.Arithmetic Progressions 7.Bee 8.Checksum algorithm 9.Coin Test 10.Dexter need help 11.Double 12.Easy problem 13.Favorite number 14.Graveyard 15.Hailstone 16.Hanoi Ⅱ 17.Houseboat 18.Music Composer
19.Redistribute wealth 20.Road trip 21.Scoring 22.Specialized Numbers 23.Sticks 24.Sum of Consecutive 25.Symmetric Sort 26.The Clock 27.The Ratio of gainers to losers 28.VOL大学乒乓球比赛 29.毕业设计论文打印 30.边沿与内芯的差 31.不会吧,又是A+B 32.不屈的小蜗 33.操场训练 34.插入链表节点 35.插入排序 36.插入字符 37.成绩表计算 38.成绩转换 39.出租车费 40.除法
41.创建与遍历职工链表 42.大数乘法 43.大数除法 44.大数加法 45.单词频次 46.迭代求根 47.多项式的猜想 48.二分查找 49.二分求根 50.发工资的日子 51.方差 52.分离单词 53.分数拆分 54.分数化小数 55.分数加减法 56.复数 57.高低交换 58.公园喷水器 59.韩信点兵 60.行程编码压缩算法 61.合并字符串 62.猴子分桃
第四章 平面机构的力分析 题4-7 机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=d r d r F F M M //=。试求图示各机构在图示位置时的机械效益。图a 所示为一铆钉机,图b 为一小型压力机,图c 为一剪刀。计算所需各尺寸从图中量取。 (a ) (b) (c) 解:(a)作铆钉机的机构运动简图及受力 见下图(a ) 由构件3的力平衡条件有:02343=++R R r F F F 由构件1的力平衡条件有:04121 =++d R R 按上面两式作力的多边形见图(b )得 θcot ==?d r F F (b )作压力机的机构运动简图及受力图见(c ) 由滑块5的力平衡条件有:04565=++R R F F G 由构件2的力平衡条件有:0123242 =++R R R 其中 5442R R = 按上面两式作力的多边形见图(d ),得t F G = ? (c) 对A 点取矩时有 b F a F d r ?=? a b =? 其中a 、b 为F r 、F d 两力距离A 点的力臂。t F G = ?
(d) (a)(b) d r R41 F R43 F d G 题4-8 在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(为常数),活塞及其附件的重量G3=21N,连杆质量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离l BS2=l BC/3。试确定在图示位置时活塞的惯性力以及连杆的总惯性力。 解:1) 选定比例尺, mm m l 005 .0 = μ绘制机构运动简图。(图(a) ) 2)运动分析:以比例尺vμ作速度多边形,如图(b) 以比例尺 a μ作加速度多边形如图4-1 (c) 2 44 . 23 s m c p a a C ='' =μ2 2 2 2100 s m s p a a S = '' =μ 2 2 2 1 5150 s BC c n l a l a BC t B C= '' = = μ μ α 3) 确定惯性力 活塞3:) ( 3767 3 3 3 3 N a g G a m F C S I = - = - =方向与c p''相反。 连杆2:) ( 5357 2 2 2 2 32 N a g G a m F S S I = - = - =方向与 2 s p'相反。 ) (8. 218 2 2 2 m N J M S I ? = - =α(顺时针) 总惯性力:) ( 5357 2 2 N F F I I = = ') ( 04 .0 2 2 2 m F M l I I h = =(图(a) )
1—1填空题: 1.机械是机器和机构的总称。 机械原理课程的研究内容是有关机械的基本理论问题。 2.各种机构都是用来传递与变换运动和力的可动的装置。 如:齿轮机构、连杆机构、凸轮机构等。 3.凡用来完成有用功的机器是工作机。 如:机床、起重机、纺织机等。 凡将其它形式的能量转换为机械能的机器是原动机。 如:电动机、蒸气机、内燃机等。 4.在机器中,零件是制造的单元,构件是运动的单元。 5.机器中的构件可以是单一的零件,也可以是由多个零件装配成的刚性结构。 在机械原理课程中,我们将构件作为研究的基本单元。 6.两个构件直接接触形成的可动联接称为运动副。 7.面接触的运动副称为低副,如移动副、转动副等。 点或面接触的运动副称为高副,如凸轮副、齿轮副等。 8.构件通过运动副的连接而构成的可相对运动的系统是运动链,若组成运动链的各构件构成首尾封闭的系统称为闭链,若未构成首尾封闭的系统称为开链。 9.在运动链中,如果将其中一个构件固定而成为机架,则该运动链便成为机构。10.平面机构是指组成机构的各个构件均在同一个平面上运动。 11.在平面机构中,平面低副提供 2 个约束,平面高副提供 1 个约束。12.机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。13.机构具有确定运动的条件是机构的原动件数目应等于机构的自由度的数目。1—2试画出图示平面机构的机构示意图,并计算自由度(步骤:1)列出完整公式,2)
带入数据,3)写出结果)。其中: 图a) 唧筒机构――用于水井的半自动汲水机构。图中水管4直通水下,当使用者来回摆动手柄2时,活塞3将上下移动,从而汲出井水。 解:自由度计算:画出机构示意图: n= 3 p L= 4 p H= 0 p'= 0 F'= 0 F=3n-(2p l+p h-p′)-F′ = 3×3-(2×4+0-0)-0 = 1 图b) 缝纫机针杆机构原动件1绕铰链A作整周转动,使得滑块2沿滑槽滑动,同时针杆作上下移动,完成缝线动作。 解:自由度计算:画出机构示意图: n= 3 p L= 4 p H= 0 p'= 0 F'= 0 F=3n-(2p l+p h-p′)-F′ = 3×3-(2×4+0-0)-0 = 1 1—3试绘出图a)所示偏心回转油泵机构的运动简图(各部分尺寸由图中直接量观察方向 3 2 4 1 4 3 2 1
第二章 机构的结构分析 题2-11 图a 所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。 解:1)取比例尺,绘制机构运动简图。(图2-11a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p 01423323=-?-?=--=h l p p n F 原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。 分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。故需增加构件的自由度。 3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。 (1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。 (2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。 (3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
1 1 (c) 题2-11 (d) 5 4 3 6 4 (a) 5 3 2 5 2 1 5 43 6 4 2 6 (b) 3 2 1 讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。 题2-12 图a 所示为一小型压力机。图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。试绘制其机构运动简图,并计算自由度。 解:分析机构的组成: 此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5
第9章课后参考答案 9-1何谓凸轮机构传动中的刚性冲击和柔性冲击?试补全图示各段s v一、一曲线,并指出哪些地方有刚性冲击,哪些地方有柔性冲击? 答凸轮机构传动中的刚性冲击是指理论上无穷大的惯性力瞬问作用到构件上,使构件产生强烈的冲击;而柔性冲击是指理论上有限大的惯性力瞬间作用到构件上,使构件产生的冲击。 s-S , v-S , a-S曲线见图。在图9-1中B,C处有刚性冲击,在0, A,D,E处有柔性冲击。 9—2何谓凸轮工作廓线的变尖现象和推杆运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免? 答在用包络的方法确定凸轮的工作廓线时,凸轮的工作廓线出现尖点的现象称为变尖现象:凸轮的工作廓线使推杆不能实现预期的运动规律的现象件为失真现象。变尖的工作廓线极易磨损,使推杆运动失真.使推杆运动规律达不到设计要求,因此应设法避免。变尖和失真现象可通过增大凸轮的基圆半径.减小滚子半 题9-1图 径以及修改推杆的运动规律等方法来避免。 9—3力封闭与几何封闭凸轮机构的许用压力角的确定是否一样?为什么?答力封闭与几何封闭凸轮机沟的许用压力角的确定是不一样的。因为在回程阶 段-对于力封闭的凸轮饥构,由于这时使推杆运动的不是凸轮对推杆的作用力F,而是推杆所受的封闭力.其不存在自锁的同题,故允许采用较大的压力角。但为?4^ y 5 J 曲
使推秆与凸轮之间的作用力不致过大。也需限定较大的许用压力角。而对于几何形状封闭的凸轮机构,则需要考虑自锁的问题。许用压力角相对就小一些。 9—4 一滚子推杆盘形凸轮机构,在使用中发现推杆滚子的直径偏小,欲改用较大的滚子?问是否可行?为什么? 答不可行。因为滚子半径增大后。凸轮的理论廓线改变了.推杆的运动规律也势必发生变化。 9—5 一对心直动推杆盘形凸轮机构,在使用中发现推程压力角稍偏大,拟采用推杆偏置的办法来改善,问是否可行?为什么? 答不可行。因为推杆偏置的大小、方向的改变会直接影响推杆的运动规律. 而原凸轮机构推杆的运动规律应该是不允许擅自改动的。 9-6 在图示机构中,哪个是正偏置?哪个是负偏置?根据式(9-24)说明偏置方向对凸轮机构压力角有何影响? S 9-6 答由凸轮的回转中心作推杆轴线的垂线?得垂足点,若凸轮在垂足点的速度沿推杆的推程方向?刚凸轮机构为正偏置?反之为负偏置。由此可知?在图示机沟中,两个均为正偏置。由 , ds/d me tan J(r0 e2) s 可知.在其他条件不变的情况下。若为正偏置(e前取减号).由于推程时(ds/d S )为正.式中分子ds/d5 -evds/d S ,故压力角a减小。而回程时,由于ds/d S 为负,式中分子为 |(ds/d S )-e|=| (ds/d S ) |+ |e| >ds/d S。故压力角增大。负偏置时刚相反,即正偏置会使推程压力角减小,回程压力角增大;负偏置会使推程压力角增大,回程压力角减小。9—7试标出题9—6a图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90。后推杆的位移;并标出题9—6b图推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。 解如图(a)所示,用直线连接圆盘凸轮圆心A和滚子中心B,则直线AB与推杆导路之间所夹的锐角为图示位置时凸轮机构的压力角。以A为圆心,AB为半径作圆,得凸轮的理论廓线圆。连接A与凸轮的转动中心O并延长,交于凸轮的理论廓线于C点。以O 为圆心.以OC为半径作圆得凸轮的基圆。以O为圆心,以O点到推杆导路的距离OD 为半径作圆得推杆的偏距圆;。延长推杆导路线交基圆于G-点,以直线连接0G。过0点作0G的垂线,交基圆于E点。过E 点在偏距圆的下侧作切线?切点为H点?交理论廓线于F点,则线段EF的长即为凸轮从图示位置转过90后推杆的位移s。
第一章绪论 1.1何谓源程序、目标程序、翻译程序、编译程序和解释程序?它们之间可 能有何种关系? 1.2一个典型的编译系统通常由哪些部分组成?各部分的主要功能是什么? 1.3选择一种你所熟悉的程序设计语言,试列出此语言中的全部关键字, 并通过上机使用该语言以判明这些关键字是否为保留字。 1.4选取一种你所熟悉的语言,试对它进行分析,以找出此语言中的括号、 关键字END以及逗号有多少种不同的用途。 1.5试用你常用的一种高级语言编写一短小的程序,上机进行编译和运行, 记录下操作步骤和输出信息,如果可能,请卸出中间代码和目标代码。 参考答案 第一章习题解答 1.解:源程序是指以某种程序设计语言所编写的程序。目标程序是指编译程 序(或解释程序)将源程序处理加工而得的另一种语言(目标语言)的程 序。翻译程序是将某种语言翻译成另一种语言的程序的统称。编译程序与 解释程序均为翻译程序,但二者工作方法不同。解释程序的特点是并不先 将高级语言程序全部翻译成机器代码,而是每读入一条高级语言程序语句,就用解释程序将其翻译成一段机器指令并执行之,然后再读入下一条语句 继续进行解释、执行,如此反复。即边解释边执行,翻译所得的指令序列 并不保存。编译程序的特点是先将高级语言程序翻译成机器语言程序,将 其保存到指定的空间中,在用户需要时再执行之。即先翻译、后执行。 2.解:一般说来,编译程序主要由词法分析程序、语法分析程序、语义分析 程序、中间代码生成程序、代码优化程序、目标代码生成程序、信息表管 理程序、错误检查处理程序组成。 3.解:C语言的关键字有:auto break case char const continue default do double else enum extern float for goto if int long register return short signed sizeof static struct switch typedef union unsigned void volatile while。上述关键字在C语言中均为保留 字。 4.解:C语言中括号有三种:{},[],()。其中,{}用于语句括号;[]用 于数组;()用于函数(定义与调用)及表达式运算(改变运算顺序)。 C语言中无END关键字。逗号在C语言中被视为分隔符和运算符,作为优 先级最低的运算符,运算结果为逗号表达式最右侧子表达式的值(如: (a,b,c,d)的值为d)。 5.略
西北工业大学考试试题(卷) 2007-2008学年第二学期 开课学院计算机、软件学院课程数字逻辑学时54 考试日期2008.6.11 考试时间2小时考试形式(闭)(A )卷 一、分析图示时序电路的逻辑功能,设初态为0。写出激励函数和状态方程、列出状态转换表、画出完全状态图、说明是几进制计数器、有无自启动能力。(15分) 二、图示电路均为TTL 门, 各电路在实现给定的逻辑关系时是否有错误,如有错误请改错。(12分) A B F AB = F A B =+B (2) F AB =A B (3) =1A B C F A B C =⊕⊕(4) 三、使用卡诺图法化简逻辑函数 ()(,,,)1,2,4,7,8,11,13,14m f A B C D = ∑(8分)
四、按要求完成下列各题: (10分) 1、用代数法证明:若A 1A 2= 0,则1212A A A A ⊕=+ 2、写出逻辑函数(,,,)F A B C D A B CD AD =++的对偶函数和反函数。 五、试用八选一数据选择器CT74LS151用降维法实现逻辑函数:(15分) ()() (,,,)1,5,8,9,13,147,10,11,15m d F A B C D = +∑∑ 六、由维持-阻塞型D 触发器组成的电路如图所示。已知A 、B 、CP 端的电压波形,试画出Q 端对应的电压波形。设电路的初始状态为0。(15分) CP Q B 0 七、由集成四位二进制同步步计数器74161和8选1数据选择器74LS151组成的电路如图所示。试按要求回答:(15分) CP 1 F (1)74161组成几进制计数器电路; 00011110 CD 1 1 1 11 11 1 00011110AB B
2010年 一、作图示结构的内力图,其中P=2qa,m=qa 2/2。(10分) 二、已知某构件的应力状态如图,材料的弹性模量E=200GPa,泊松比μ=0.25。试求主应力,最大剪应力,最大线应变,并 画出该点的应力圆草图。(10分) 三、重为G 的重物自高为h 处自由落下,冲击到AB 梁的中点C ,材料的弹性模量为E ,试求梁内最大动挠度。(8分) 四、钢制平面直角曲拐ABC ,受力如图。q=2.5πKN/m ,AB 段为圆截面, [σ]=160MPa ,设L=10d ,P x =qL,试设计AB 段的直径d 。(15分) 五、图示钢架,EI 为常数,试求铰链C 左右两截面的相对转角(不计轴力及剪力对变形的影响)。(12分)
六、图示梁由三块等厚木板胶合而成,载荷P 可以在ABC 梁上移动。已知板的许用弯曲正应力为[σ]=10Mpa ,许用剪应力[τ]=1Mpa ,胶合面上的许用剪应力[τ]胶=0.34Mpa ,a=1m ,b=10cm ,h=5cm ,试求许可荷载[P]。(10分) 七、图示一转臂起重机架ABC ,其中AB 为空心圆截面杆D=76mm ,d=68mm ,BC 为实心圆截面杆D 1=20mm ,两杆材料相同,σp =200Mpa ,σs =235Mpa ,E=206Gpa 。取强度安全系数n=1.5,稳定安全系数n st =4。最大起重量G=20KN ,临界应力经验公式为σcr =304-1.12λ(Mpa )。试校核此结构。(15分) 八、水平曲拐ABC 为圆截面杆,在C 段上方有一铅垂杆DK ,制造时DK 杆短了△。曲拐AB 和BC 段的抗扭刚度和抗弯刚度皆为GI P 和EI 。且GI P =4 5 EI 。杆DK 抗拉刚度为EA ,且EA=225EI a 。试求: (1)在AB 段杆的B 端加多大扭矩,才可使C 点刚好与D 点相接触? (2)若C 、D 两点相接触后,用铰链将C 、D 两点连在一起,在逐渐撤除所加扭矩,求DK 杆内的轴力和固定端处A 截面上的内力。(15分)
编号: 西北工业大学考试试题(卷) 2006 -2007 学年第 一 学期期中考试 开课学院 理学院 课程 高等数学(上) 学时 96 考试日期 2006/11/17 时间 2 小时 考试形式(闭)(A )卷 2. 命题教师和审题教师姓名应在试卷存档时填写。 共 6 页 第 1 页
1、若1 ) 1 1 ( lim 2 = - - - + +∞ → b ax x x x ,则() A. 1 ,1= - =b a;B. 0 ,1= =b a;C. 0 ,1= - =b a;D. 1 ,1= =b a。 2、设 )1 (| | ) ( 2 2 - - = x x x x x f,则以下结论中错误的是() A. 1 ,0 ,1= = - =x x x为) (x f的间断点; B. 1- = x为无穷间断点; C. 0 = x为可去间断点; D. 1 = x为第一类间断点。 3、设 ?? ? ? ? ≤ > - = ), ( , cos 1 ) ( 2x x g x x x x x f,其中) (x g是有界函数,则) (x f在0 = x处() A. 极限不存在; B. 极限存在,但不连续; C. 连续,但不可导; D. 可导。 4、曲线0 = + -y x e e xy在0 = x处的切线方程为() A. x y=;B. 1 + =x y;C. 1 2+ =x y;D. 1 - =x y。 5、设) (x f在0 = x的某领域内可导,且0 )0(= 'f,又 2 1 ) ( lim = ' →x x f x ,则() A. )0(f一定是) (x f的极大值;B. )0(f一定是) (x f的极小值; C. )0(f一定不是) (x f的极值;D. 不能确定)0(f是否为) (x f的极值。 6、有一容器如图所示,假定以匀速向容器内注水, )(t h为容器内水平面高度随时间变化的规律,则 能正确反映) (t h'变化状态的曲线是() A. B. C. D. 7、设函数1 3 ) (3- - =x x x f,则方程0 ) (= x f() A. 在)1,0(内有实根; B. 在)0,1 (-内没有实根; C. 在) ,0(+∞内有两个不同的实根;D. 在)0, (-∞内有两个不同的实根。 8、设在]1,0[上0 ) (> ''x f,则)0( )1( ),1( ), 0(f f f f- ' '的大小顺序是() A. )1( )0( )1( )0(f f f f' < - < '; B. )0( )0( )1( )1(f f f f' < - < '; C. )0( )1( )0( )1(f f f f' < ' < -; D. )0( )1( )1( )0(f f f f- < ' < '。 BCDA BCDA 三、计算题(5 1 3 5' = ?') 1、计算x e x x ln1 1 ) (ln lim- → 。
2000年西北工业大学研究生入学机械原理试题 一、填空题(每小题2分,共20分) 1.一对心曲柄滑块机构中,若改为以曲柄为机架,则将演化为()机构。 2.在偏置直动尖顶推杆盘形凸轮机构中,机构的压力角与下列参数有关,即()。 3.要使两圆柱齿轮作定传动比传动,则齿廓必须满足定条件为()。 4.刚性转子动平衡的条件是()。 5.某机器主轴实际转速在其平均转速的±3%范围内变化,则其速度不均匀系数δ=()。 6.在四槽单销外接槽轮机构中,在拨盘的一个运动周期内,槽轮停歇时间为3s,则主动拨盘转速为()r/min。 7.在构件1,2组成的转动副中,确定构件1对构件2的总反力R12的方法是()。 8.在平面机构中,一个运动副引入的约束数的变化范围是()。 9.在设计轮系中,齿轮齿数应满足的条件是()。 10.在常用推杆运动规律中,存在柔性冲击的是()。 二、简答题(每小题5分,共20分) 1.对齿轮进行变位修正的目的是什么? 2.机构的“死点”与“自锁”的含义有何不同? 3.一凸轮轮廓按尖顶推杆实现某种运动规律而设计,若使用时想改为滚子推杆,问可行否?为什么? 4.为什么平面铰链四杆机构一般只能近似地实现给定的运动规律和轨迹? 三、在图43所示六杆机构中,已知各构件尺寸(μ1=0.001m/mm),AB以ω1=100rad/s匀 速转动,试画出机构的速度多边形和加速度多边形。(8分) 四、在图44所示的送料机构中,被送物件对机构对推力为P,设机构处于平衡状态,各滑 动副处的摩擦角φ=15°,回转副处的摩擦圆半径ρ=5mm,在不计各构件重力及惯性力的条件下,画出构件2所受各力的方向。(8分)
自然辨证法题目(六选三) 参考庞小宁的《科学技术哲学概论》 1.(1)生态文明的内涵有哪些?(P78-P86) 生态文明,是人类遵循人与自然和谐发展规律,推进社会、经济和文化发展所取得的物质与精神成果的总和;是指以人与自然、人与人和谐共生、全面发展、持续繁荣为基本宗旨的文化伦理形态。它是对人类长期以来主导人类社会的物质文明的反思,是对人与自然关系历史的总结和升华。其内涵具体包括以下几个方面: 一是人与自然和谐的文化价值观。树立符合自然生态法则的文化价值需求,体悟自然是人类生命的依托,自然的消亡必然导致人类生命系统的消亡,尊重生命、爱护生命并不是人类对其他生命存在物的施舍,而是人类自身进步的需要,把对自然的爱护提升为一种不同于人类中心主义的宇宙情怀和内在精神信念。 二是生态系统可持续前提下的生产观。遵循生态系统是有限的、有弹性的和不可完全预测的原则,人类的生产劳动要节约和综合利用自然资源,形成生态化的产业体系,使生态产业成为经济增长的主要源泉。物质产品的生产,在原料开采、制造、使用至废弃的整个生命周期中,对资源和能源的消耗最少、对环境影响最小、再生循环利用率最高。 三是满足自身需要又不损害自然的消费观。提倡“有限福祉”的生活方式。人们的追求不再是对物质财富的过度享受,而是一种既满足自身需要、又不损害自然,既满足当代人的需要、又不损害后代人需要的生活。这种公平和共享的道德,成为人与自然、人与人之间和谐发展的规范。 总结生态文明:生态文明的提出,是人们对可持续发展问题认识深化的必然结果。严酷的现实告诉我们,人与自然都是生态系统中不可或缺的重要组成部分。人与自然不存在统治与被统治、征服与被征服的关系,而是相互依存、和谐共处、共同促进的关系。人类的发展应该是人与社会、人与环境、当代人与后代人的协调发展。人类的发展不仅要讲究代内公平,而且要讲究代际之间的公平,亦即不能以当代人的利益为中心,甚至为了当代人的利益而不惜牺牲后代人的利益。而必须讲究生态文明,牢固树立起可持续发展的生态文明观. (2)当代工程师的生态伦理观和环境保护责任是什么? 1.论述对研究对象的识别与评定:工程师作为工程活动的主体,在工作过程中会遇到各种生态伦理问题。工程师的环境保护责任和伦理责任要远远超过做好本职工作,当代工程师在改造自然的同时,必须承担起保护自然的道德义务和道德责任。因此,必须扩展道德功能的领域,把道德从调整人和人之间及人和社会之间的关系,扩展到调整人和自然的关系,重视道德在保护环境、保护自然方面的功能。从这一意义上说,当代工程师的生态伦理道德的建构标志着人类道德的进步和完善,是人类道德建设的新环境。 2.分析内在机理和因果关系:生态伦理强调人与自然和谐共处。它以保护生态环境为宗旨,以人类持续发展为着眼点,强调人与自然相互依存、相互促进、友好相处、共存共荣。在关于人与自然的关系上,目前存在着“以人为本”还是“以自然为本”的争论。前者强调人是自然的主人,主张太阳为人而生、星斗为人而亮、自然为人而存在,一切从人的利益出发,一切为人的利益服务。后者则强调人只是自然界的一个物种,人的一切活动都应以保持自然界的原貌和生态平衡为前提。这反映了,正确认识人与自然的关系已经成为建构生态伦理中的焦点和首要课题。第一,不能将作为我们党执政理论的“以人为本”与人和自然关系中“以人为本”的主张等同起来,我们党关于“以人为本”的执政理念具有特定的政治涵义,即把人民群众的根本利益作为党和国家一切工作的根本出发点和落脚点,是执政为民和民主执政的统一。而人和自然关系中“以人为本”的主张,强调的是人对自然的权利。第二,不能单
西北工业大学考试试题 (2003-2004学年第二学期) 一、简答题(15分) 1. 编译程序与解释程序有何区别? 2. 何谓素短语? 3. 过程调用时,主调程序与被调程序之间的信息传递有哪些方式? 4. 何谓语法制导翻译? 5. 何谓算符文法? 二、选择题(10分) 1. 描述一个语言的文法是() A.唯一的 B.不唯一的 C.可能唯一,也可能不唯一 2. 若文法G定义的语言是无限集,则文法必然是() A.前后文无关文法 B.正规文法 C.二义性文法 D.递归文法 3. 数组的内情向量中肯定不含数组的()信息 A.维数 B.类型 C.各维的上下界 D.各维的界差 4. 简单优先分析每次归约的是() A. 最左直接短语 B.直接短语 C.最左素短语 D.控制结点 5. 最适合动态建立数据实体的内存分配方式是() A. 栈式分配 B.堆式分配 C.编译时预先分配 D.以上三种均可 三、(10分)给定文法G=({S,L},{a,(,)},{S→(L)|a L→L,S|S},S)。给出句型”(S,(a))”的推导和语法树并指出此句型的所有短语、直接短语、句柄和素短语。 四、(12分)设语言L是由奇数个a和偶数(可以是0)个b组成的符号串之集。 1.构造识别L的DFA; 2. 给出定义L的正规文法; 五、(10分)将文法G[S]:S→[A A→AS|B] B→Bi|i 改写为等价的LL(1)文法,
并给出相应的LL(1)分析表。 六、(20分)给定文法G[S]:S→(S)|a 1.构造识别文法G[S]活前缀的LR(1)项目的DFA; 2. 构造LR(1)分析表; 3. 合并同心集,构造LALR(1)分析表。 七、(8分)某语言算术表达式的文法定义为E→E+E|i| if B then E else E 其中,第三个候选式称为条件算术表达式,B为布尔表达式,then及else后的E均为算术表达式(即简单算术表达式或条件表达式),其语义为,当B为真时,表达式的值取then后的E的值,否则取else的E的值。假定所有表达式是整型的,试将下面关于条件算术表达式的属性翻译文法填写完全: 八、(8分)给定PASCAL程序语句 while a>b do if a>0 then a:=a-1 else a:=a+1; 1. 将该语句翻译成逆波兰式; 2. 给出编译程序扫描到then处及分号处时所得的四元式序列。 九、 (7分)用DAG图对下面的基本块进行优化(假定出基本块后只有A、G、L