
第八章 非线性控制系统分析习题与解答
7-1 三个非线性系统的非线性环节一样,线性部分分别为
(1) G s s s ()(.)=
+1011 (2) G s s s ()()=+2
1
(3) G s s s s s ()(.)
()(.)
=+++21511011
试问用描述函数法分析时,哪个系统分析的准确度高?
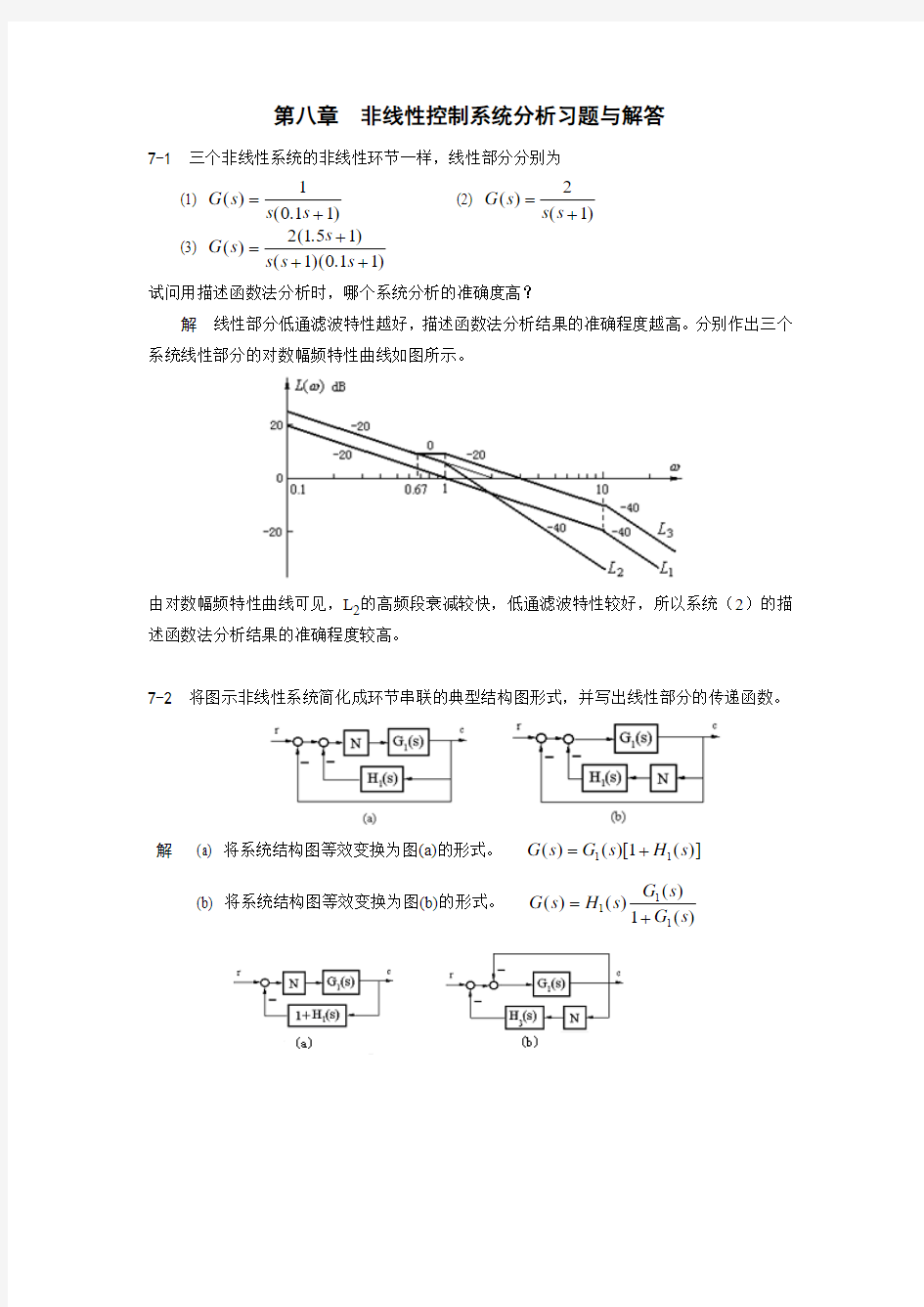
解 线性部分低通滤波特性越好,描述函数法分析结果的准确程度越高。分别作出三个系统线性部分的对数幅频特性曲线如图所示。
由对数幅频特性曲线可见,L 2的高频段衰减较快,低通滤波特性较好,所以系统(2)的描述函数法分析结果的准确程度较高。
7-2 将图示非线性系统简化成环节串联的典型结构图形式,并写出线性部分的传递函数。
解 (a) 将系统结构图等效变换为图(a)的形式。 G s G s H s ()()[()]=+111 (b) 将系统结构图等效变换为图(b)的形式。 G s H s G s G s ()()
()
()
=+1111
7-3 判断题7-41图中各系统是否稳定;)(1A N -与)(ωj G 两曲线交点是否为自振点。
解 (a ) 不是 (b) 是 (c) 是 (d) c a 、点是,b 点不是 (e) 是
(f) a 点不是,b 点是 (g) a 点不是,b 点是 (h) 系统不稳定 (i) 系统不稳定 (j) 系统稳定
7-4 已知非线性系统的结构如图所示
图中非线性环节的描述函数为N A A A A ()()=++>6
2
试用描述函数法确定:
(1)使该非线性系统稳定、不稳定以及产生周期运动时,线性部分的K值范围; (2)判断周期运动的稳定性,并计算稳定周期运动的振幅和频率。 解 (1)
-=-++126N A A A ()(), -=--∞=-101
3
1
1N N (),()
dN A dA A ()()=-+<4
202
N(A)单调降,)(1A N -也为单调降函数。画出负倒描述函数曲线)(1A N -和
G j ()ω曲线如图所示,可看出,当K 从小到大变化时,
系统会由稳定变为自振,最终不稳定。 求使 Im[G j ()]ω=0 的ω值: 令 ∠=-?-=-?G j arctg ()ωω902180 得 arctg ωω=?=451,
令 G j K
()ωωωωω===+12
2
11???
??=→
=
→==21
32
31231K K K 可得出K 值与系统特性之间的关系:
(2)由图解7-13可见,当)(1A N -和G j ()ω相交时,系统一定会自振。由自振条件
N A G j A A K A K
A ()()()()
ωω==
++?-=-++=-16226221 ()A K A +=+624 解出 )232(1
246<
K A ω 7-5 非线性系统如图所示,试用描述函数法分析周期运动的稳定性,并确定系统输出信号
振荡的振幅和频率。
解 将系统结构图等效变换为下图。
G j j j j ()()()
ωωωωωω=
+=-+-+10110110
122
222.042.014)(A j A A A N ππ?-??? ??-=???
?????-??? ??-=A j A A 2.02.0142π
1()N A -
0.2j A π= 令G j ()ω与)(1A N -的实部、虚部分别相等得
2
22.014110??
? ??-=+A A πω
10102401572
ωωπ()..+== 两式联立求解得 ω==3910806.,
.A 。 由题图,0)(=t r 时,有)(51)()(t x t e t c =-=,所以)(t c 的振幅为161.05
806
.0=。
7-6 试用描述函数法说明图示系统必然存在自振,并确定输出信号c 的自振振幅和频率,分别画出信号y x c 、、的稳态波形。
解
N A A N A A
(),()=
-=
-414
ππ 绘出)(1A N -和G j ()ω曲线如图(a )所示,可见D 点是自振点, 系统一定会自振。由自振条件可得:
N A G j ()()
=
-1ω
即 -=-+42102πωωA j j ()10
)4(10422ωωω---=j 令虚部为零解出ω=2,代入实部得A=0.796。 输出信号的自振幅值为:398.02==A A c 。 画出y x c 、、点的信号波形如图(b )所示。
实验八非线性控制系统分析 【实验目的】 1.掌握二阶系统的奇点在不同平衡点的性质。 2.运用Simulink构造非线性系统结构图。 3.利用Matlab绘制负倒描述函数曲线,运用非线性系统稳定判据进行稳定性分析,同 时分析交点处系统的运动状态,确定自振点。 【实验原理】 1.相平面分析法 相平面法是用图解法求解一般二阶非线性系统的精确方法。它不仅能给出系统稳定性信息和时间特性信息,还能给出系统运动轨迹的清晰图像。 设描述二阶系统自由运动的线性微分方程为 分别取和为相平面的横坐标与纵坐标,并将上列方程改写成 上式代表描述二阶系统自由运动的相轨迹各点处的斜率。从式中看出在及,即 坐标原点(0,0)处的斜率。这说明,相轨迹的斜率不能由该点的坐标值单值的确定,相平面上的这类点成为奇点。 无阻尼运动形式()对应的奇点是中心点; 欠阻尼运动形式()对应的奇点是稳定焦点; 过阻尼运动形式()对应的奇点是稳定节点; 负阻尼运动形式()对应的奇点是不稳定焦点; 负阻尼运动形式()对应的奇点是不稳定节点; 描述的二阶系统的奇点(0,0)称为鞍点,代表不稳定的平衡状态。2.描述函数法 设非线性系统经过变换和归化,可表示为非线性部分与线性部分相串联的典型反馈结构如图所示。 从图中可写出非线性系统经谐波线性化处理线性化系统的闭环频率响应为
由上式求得图中所示非线性系统特征方程为 ,还可写成 其中 称为非线性特性的负倒描述函数。若有 使上式成立,便有 或 ,对应着一个正弦周期运动。若系统扰动后,上述周期运 动经过一段时间,振幅仍能恢复为 ,则具有这种性质的周期运动,称为自激振荡。 可见自激振荡就是一种振幅能自动恢复的周期运动。周期运动解 可由特征方程式 求得,亦可通过图解法获得。 由等式在复数平面上分别绘制 曲线和 曲线。两曲线的 交点对应的参数 即为周期运动解。有几个交点就有几个周期运动解。至于该解是 否对应着自激振荡状态,取决于非线性系统稳定性分析。 【实验内容】 1. 相平面分析法 (1)二阶线性系统相平面分析不同奇点的性质 例8-1 设一个二阶对象模型为 2 2 2 ()2n n n G s s s ωξωω= ++ 绘制2,n ωζ=分别为0.5、-0.5、1. 25、0时系统的相平面图及2 4()4 G s s = -的相平面图。 图8-1 当2,0.5n ωζ==时,系统的单位阶跃响应曲线和相平面图
2012-2013 学年第一学期期末考试试卷 《现代控制系统》研究生课程 2012.12 姓名 学号 班级 成绩 一、 填空(共20分) 1. 非线性系统可能有多个平衡点,是因为 可能存在多个极点 。(2分) 2. 如果一个系统是稳定的,但不是渐近稳定而是临界稳定的,则该系统的最终状态 可能是 在极限环上震荡 。(2分) 3. 系统的鲁棒性是在外界干扰或模型发生变化时系统性能的保持能力 。 (2分) 4. 系统的可观性定义为 对于任一给定的输入u (t ),存在一有限观测时间,使得 此期间测量到的输出y (t ),能唯一地确定系统的初始状态x (t0),则称此状态是可观测的 。线性系统的可观性判据为 可观测性判别矩阵满秩 。用观测器估计的状态进行状态反馈控制而二者又互不影响是基于 分离 原理(4分) 5. 6. 频率响应的输入信号为 正弦信号 。(2分) 7. 线性定常系统的相对稳定性可用 幅值裕度 和 相位裕度 表示。(2分) 8. 已知一个系统开环传递函数为 1) 4)(s 2)(s (s 50 G(s)+++= ,用MATLAB 语言编 程实现该系统的单位负反馈阶跃响应 a=[50],b=[1,7,14,1],sys=tf(a,b) sys1=feedback (sys ,1,-1) (4分)
二、分析和计算题(共80分) 2.1 考虑如下的质量弹簧阻尼系统,每个质量块的质量分别为1m 和2m ,1k 、2k 和3k 为弹簧的弹性系数,1b 、2b 和3b 为速度阻尼系数,列出在外力1e f 和 2e f 的 作用下每个质量块的位移分别为1q 和2q ,利用位移和速度作为状态量、位移1q 和 2q 为输出,写出运动学方程并表达为状态空间的形式。(7分) 题2.1图 2.2 给定性定常系统为: 3 1.75 1.2524 0000 1 00u ---???? ????=+???????????? x x 试设计状态反馈控制器u =-Kx ,希望该系统的闭环极点配置为* 1 4λ=-, * 24λ=-和*35λ=-。(7分) 2.3 如下定常非线性系统 ()2 12122 2211122212 2cos 21sin 3x x x x u x x x x x x y x x u u ?=++??=+++??=++-?? 给出该系统关于 =x 0 的线性化表达式。(7分)
9 控制系统的非线性问题 9.1概述 在物理世界中,理想的线性系统并不存在。严格来讲,所有的控制系统都是非线性系统。例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。实际上,所有的物理元件都具有非线性特性。如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。 图9-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。 图9-1 伺服电动机特性 9.1.1控制系统中的典型非线性特性的类型 常见典型非线性特性有饱和非线性、间隙非线性、死区非线性、继电非线性等。 9.1.1.1饱和非线性 控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性。如图9-2所示,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和非线性特性。有时,工程上还人为引入饱和非线性特性以限制过载。 图9-2 饱和非线性 9.1.1.2不灵敏区(死区)非线性 控制系统中的测量元件、执行元件等一般都具有死区特性。例如一些测量元件对微弱的输入量不敏感,电动机只有在输入信号增大到一定程度的时候才会转动等等。如图9-3所示,其特性是输入信号在?<
第八章 矩阵特征值问题计算 3.用幂法计算下列矩阵的主特征值及对应的特征向量 12732343()341;()463213331a A b A --???? ????=-=-???? ????--???? 当特征值有3位小数稳定代终止。 解:套用幂法公式 010,,,1,2,.... max()k k k k k v u v Au u k v -≠== = 取0(1,1,1)0T u =≠,将A 1代入上式,计算结果见下表 则1A 的主特征值19.605572λ≈,特征向量1(10.6050.394369)T x ≈- 将2A 代入幂法公式,取0(1,1,1)T u =,计算结果见下表 则2A 主住特征值18.869699λ≈,特征向量1(0.604228,1,0.160881)T x ≈- 4.用反幂法求矩阵 621231111A ?? ??=?? ???? 的最接近于6的特征向量。 解:本题按带原点平移的反幂法计算。平移向量p=6,则将
021231115B A pI ?? ??=-=-?? ??-?? 进行三分解:PB=LU ,其中 1 002310101511 001,10,02 221004 2701005 5P L U ? ??? ????-??? ??? ??????===-???????????? ?? ?? ??? ??? 然后1(1,1,1)T Uv =,解得 1 111,max()v v u v = 1,,,2,3,.... max()k k k k k k k v Ly PU Uv y U k v -=== = 计算结果如下:
第九章 非线性控制系统 一、填空选择题(每题2分) 1.非线性系统的稳定性与下列( )因素有关。 A . 系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 2.非线性系统自持振荡是与-------有关。 A .系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 3.非线性系统自持振荡中的振幅和频率是由-------决定的, 4.相平面法适用于-------阶非线性系统,描述函数法适用于-------阶非线性系统。 5.系统中有二个非线性元件串联,其描述函数分别为N 1、N 2,则合成的描述函数必是( ) A .N 1/N 2 B .N 1*N 2 C .N 1+N 2 D .需重新分析计算 6.系统的-1/N 和G (jw )如图,在A 和B 处产生了自持振荡,分析其稳定性,A 点是-----的,B 点是------的 7.非线性系统的相轨迹在相平面的上半部,其走向是从----向----方向运动,而在相平面的下半部则从---向----运动。 8.相轨迹的对称性是指其曲线可能对称于----,-----,或-----;正交性是指与-----轴正交。 9.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点位置是-------。 10.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是-------。 11.极限环把相平面分为内外二部分,相轨迹----(填能或不能)从环内穿越极限环进入环外,--------(填能或不能)从环外穿越极限环进入环内。 12.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是( )。 A 、稳定节点 B 、稳定焦点 C 、鞍点 D 、中心点 1. D 2. A 3. 系统本身的特性 4. 一、二,任意 5. D 6. 不稳定,稳定 7. 左,右,右,左
参考答案 一、填空题 1. 非本质;本质 2. 自持振荡 3. 初始条件;输入信号大小 4. 饱和非线性;死区非线性;间隙非线性;继电器非线性 5. 不稳定 6. 稳定;不稳定;半稳定 7. 自左向右;自右向左 二、分析与计算题 1. 求3()()y t ax t =的描述函数。 解:由于3()()y t ax t =是单值奇函数,所以其傅里叶级数展开式中A 0=0、A 1=0、φ1=0,将()sin x t A t ω=代入B 1的计算公式,可得 2102330340 3203203 03031()sin 1sin sin 2sin 21cos 2()2 212cos 2cos 24 1cos 412cos 22242311(cos 2cos 4)828 231 (sin 284 B y t td t aA t td t aA td t aA t d t aA t t d t t t aA d t aA t t d t aA π π π ππππωωπωωωπωωπωωπωωωπωωωπωωωπππ===-=-+=+-+==-+=-???????3 1sin 4) 003234 t t aA ππωω+= 所以 32 133()44 B aA N A aA A A === 2.设具有滞环继电器非线性特性的非线性系统结构如题图8.1所示,已知b =1,a =0.3,试判断系统是否存在自持振荡,若存在,则求出自持振荡的幅值和频率。 题图8.1 解:具有滞环的继电器非线性特性的描述函数为 2 4()j ()ab N A A a A π=≥ 其描述函数负倒数特性为 1j ()()4a A a N A b π-=≥ 可见,描述函数负倒数特性的虚部为常数4a b π-,即1()N A -曲线为一条虚部为4a b π-的直线。 由于10 ()(21)(0.41) G s s s =++,所以
3描述函数法一.本质非线性特性的谐波线性化 1.谐波线性化具有本质非线性的非线性元件在正弦输入作用下在其非正弦周期函数的输出响应中假设只有基波分量有意义从而将本质非线性特性在这种假设下视为线性特性的一种近似 3.应用描述函数法分析非线性系统的前提 a 非线性特性具有奇对称心 b非线性系统具有图a所时的典型结构 c非线性部分输出xt中的基波分量最强 d非线性部分Gs的低通滤波效应较好 b非线性特性的描述函数的求取方法二.典型非线性特性的描述函数 1饱和特性的描述函数 2死区特性描述函数 3间隙特性的描述函数 1 引言第七章非线性控制系统分析非线性指元件或环节的静特性不是按线性规律变化非线性系统如果一个控制系统包含一个或一个以上具有非线性静特性的元件或环节则称这类系统为非线性系统其特性不能用线性微分方程来描述一.控制系统中的典型非线性特性下面介绍的这些特性中一些是组成控制系统的元件所固有的如饱和特性死区特性和滞环特性等这些特性一般来说对控制系统的性能是不利的另一些特性则是为了改善系统的性能而人为加入的如继电器特性变增益特性在控制系统中加入这类特性一般来说能使系统具有比线性系统更为优良的动态特性非线性系统分析饱和特性 2死区特性危害使系统输出信号在相位上产生滞后从而降低系统的相对稳定性使系统产生自持振荡危害使系统输出信号在相位上产生滞后从而降低系统的相对稳定性使系统产生自持振荡 4继电器特性功能改善系统性能的切换元件 4继电器特性特点使系统在大误差信号时具有较大的增益从而使系统响应迅速而在小误差信号时具有较小的增益从而提高系统的相对稳定性同时抑制高频低振幅噪声提高系统响应控制信号的准确度本
大学几乎所有学科的课本答案 ! 任明嘉的日志 经济金融 [PDF格式]《会计学原理》同步练习题答案 [Word格式]《成本会计》习题及答案(自学推荐,23页) [Word格式]《成本会计》配套习题集参考答案 [Word格式]《实用成本会计》习题答案 [Word格式]《会计电算化》教材习题答案(09年) [JPG格式]会计从业《基础会计》课后答案 [Word格式]《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先)[Word格式]《宏观经济学》习题答案(第七版,多恩布什) [Word格式]《国际贸易》课后习题答案(海闻P.林德特王新奎) [PDF格式]《西方经济学》习题答案(第三版,高鸿业)可直接打印 [Word格式]《金融工程》课后题答案(郑振龙版) [Word格式]《宏观经济学》课后答案(布兰查德版) [JPG格式]《投资学》课后习题答案(英文版,牛逼版) [PDF格式]《投资学》课后习题答案(博迪,第四版) [Word格式]《微观经济学》课后答案(高鸿业版) [Word格式]《公司理财》课后答案(英文版,第六版)
[Word格式]《国际经济学》教师手册及课后习题答案(克鲁格曼,第六版) [Word格式]《金融市场学》课后习题答案(张亦春,郑振龙,第二版)[PDF格式]《金融市场学》电子书(张亦春,郑振龙,第二版) [Word格式]《微观经济学》课后答案(平狄克版) [Word格式]《中级财务会计》习题答案(第二版,刘永泽) [PDF格式]《国际经济学》习题答案(萨尔瓦多,英文版) [JPG格式]《宏观经济学》课后答案(曼昆,中文版) [PDF格式]《宏观经济学》答案(曼昆,第五版,英文版)pdf格式 [Word格式]《技术经济学概论》(第二版)习题答案 [Word格式]曼昆《经济学原理》课后习题解答 [PDF格式]西方经济学(高鸿业版)教材详细答案 [Word格式]完整的英文原版曼昆宏观、微观经济学答案 [Word格式]《金融市场学》课后答案(郑振龙版) 化学物理 [Word格式]《固体物理》习题解答(方俊鑫版) [Word格式]《简明结构化学》课后习题答案(第三版,夏少武) [Word格式]《生物化学》复习资料大全(3套试卷及答案+各章习题集)[PDF格式]《光学教程》习题答案(第四版,姚启钧原著) [Word格式]《流体力学》实验分析答案(浙工大版) [Word格式]《高分子化学》课后习题答案(第四版,潘祖仁主编)
神经网络实现非线性系统设计
毕业设计(论文) 中文题目神经网络实现非线性系统设计英文题目 Neural Network Nonlinear System 院系: 年级专业: 姓名: 学号: 指导教师: 职称: 月日
【摘要】神经网络具有极强的非线性及自适应自学习的特性,常被用来模拟判断、拟合和控制等智能行为,成功渗透了几乎所有的工程应用领域,是一个在人工智能方向迅速发展的具有重大研究意义的前沿课题。 本文前两章主要介绍了神经网络的发展背景和研究现状,还有BP 网络的结构原理及相关功能。然后,对如何利用GUI工具和神经网络原理设计非线性系统的基本流程进行了详细的阐述。最后,经过利用Matlab软件进行编程,以及是经过对BP神经网络算法及函数的运用,研究其在函数逼近和数据拟合方面的应用,并分析了相关参数对运行结果的影响。 【关键词】BP网络,GUI,非线性系统 【ABSTRACT】Neural network has a strong nonlinear and adaptive self-organizing properties, often used to simulate the behavior of intelligent decision-making, cognitive control, and the successful penetration of almost all engineering applications, is a rapid development in the direction of artificial intelligence
4-1. 怎样从三相异步电动机的结构特征来区别笼型和绕线型? 答:转子绕组的作用是产生感应电动势、流过电流和产生电磁转矩,其结构型式有笼型和绕线型两种,笼型转子的每个转子槽中插入一根铜导条,在伸出铁心两端的槽口处,用两个短路铜环分别把所有导条的两端都焊接起来。如果去掉铁心,整个绕组的外形就像一个笼子,所以称为笼型转子。绕线型转子的绕组和定子相似,是用绝缘导线嵌放在转子槽内,联结成星形的三相对称绕组,绕组的三个出线端分别接到转子轴上的三个滑环(环与环,环与转轴都互相绝缘),在通过碳质电刷把电流引出来。 4-2. 怎样使三相异步电动机改变转向? 答:将同三相电源相联接的三个导线中的任意两根的对调一下,三相异步电动机改变转向。 4-3. 已知一台三相笼型异步电动机的额定功率N P =3kW ,额定转速N n =2880r/min 。试求 (1)磁极对数;(2)额定时的转差率N s ;(3)额定转矩N T 。 解:(1) 同步转速03000/min n r =,因此电动机磁极对数p 为1; (2) 00300028804%3000 N n n s n --=== (3) 9.55 N N N P T n ==9.95N m ? 4-4. 已知Y112M-4型异步电动机的技术数据为N P =4kW ,△接法,额定电压N U =380V ,N n =1440r/min ,额定电流N I =8.8A ,功率因数cos N ?=0.82,效率N η=84.5%。试求(1)磁极对数; (2)额定运行时的输入功率1N P ; (3)额定时的转差率N s ; (4)额定转矩N T 。 解:(1) 同步转速01500/min n r =,因此电动机磁极对数p 为2; (2) 1 4.73N N N P P kW η== (3) 00150014404%1500 N n n s n --=== (4) 9.55 N N N P T n ==26.5N m ? 4-5. 已知Y132M-4型异步电动机的额定功率N P 为7.5kW ,额定电流N I =15.4A ,额定转速
自动控制考试九非线性
————————————————————————————————作者:————————————————————————————————日期:
第九章 非线性控制系统 一、填空选择题(每题2分) 1.非线性系统的稳定性与下列( D )因素有关。 A . 系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 2.非线性系统自持振荡是与-------有关。 A .系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 3.非线性系统自持振荡中的振幅和频率是由-- 系统本身的特性-----决定的, 4.相平面法适用于---一、二----阶非线性系统,描述函数法适用于—任意-----阶非线性系统。 5.系统中有二个非线性元件串联,其描述函数分别为N 1、N 2,则合成的描述函数必是( D ) A .N 1/N 2 B .N 1*N 2 C .N 1+N 2 D .需重新分析计算 6.系统的-1/N 和G (jw )如图,在A 和B 处产生了自持振荡,分析其稳定性,A 点是---不稳定--的,B 点是---稳定---的 7.非线性系统的相轨迹在相平面的上半部,其走向是从—左--向—右--方向运动,而在相平面的下半部则从—右-向-左---运动。 8.相轨迹的对称性是指其曲线可能对称于----,-----,或-坐标原点----;正交性是指与-x----轴正交。 9.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点位置是-------。 10.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是-------。 11.极限环把相平面分为内外二部分,相轨迹---不能-(填能或不能)从环内穿越极限环进入环外,---不能-----(填能或不能)从环外穿越极限环进入环内。 12.已知非线性系统的微分方程是:023. ..=++x x x , 则奇点性质是( A )。 A 、稳定节点 B 、稳定焦点 C 、鞍点 D 、中心点 1. D 2. A 3. 系统本身的特性
数值分析第8章 数值积分与数值微分 8.1 填空题 (1)n+1个点的插值型数值积分公式∫f(x)dx b a ≈∑A j n j=0f(x j )的代数精度至少是 n ,最高不超过 2n+1 。【注:第1空,见定理8.1】 (2)梯形公式有 1 次代数精度,Simpson 公司有 3 次代数精度。【注:分别见定理8.1,8.3】 (3)求积公式∫f(x)dx h 0≈h 2[f (0)+f (h )]+ah 2[f ′(0)?f ′(h)]中的参数a= 1/12 时,才能保证该求积公式的代数精度达到最高,最高代数精度为 3 。 解:令f(x)=1,x,x 2带入有, { h 2[1+1]+ah 2[0?0]=h h 2[0+h ]+ah 2[1?1]=12 (h 2)h 2[0+h 2]+ah 2[0?2h ]=13 (h 3) //注:x 的导数=1 解之得,a=1/12,此时求积公式至少具有2次代数精度。 ∴ 积分公式为:∫f(x)dx h 0≈h 2[f (0)+f (h )]+h 2 12[f ′(0)?f ′(h)] 令 f(x)= x 3带入求积公式有:h 2 [0 +h 3]+ h 212 [0?3h 2]=14 (h 4),与f(x)= x 4的定积分计算值1 4 (h 4)相等, 所以,此求积公式至少具有3次代数精度。 令f(x)= x 4带入求积公式有,h 2[0+h 4]+h 2 12[0?4h 3]=1 6(h 5),与f(x)= x 5的定积分计算值1 5(h 5)不相等,所以,此求积公式的最高代数精度为3次代数精度。 8.2 确定下列求积公式的求积系数和求积节点,使其代数精度尽量高,并指出其最高代数精度。 解题思路:按照P149 中8.3式进行求解,根据求积公式中未知量n 的数量决定代入多少f(x),当积分公式代入求积节点x n 的计算结果与定积分的计算结果一致,继续代入求积节点X n+1,,若计算结果与对应的定积分计算结果不一致时,求积公式拥有最高n 次的代数精度。 (1)∫f(x)dx 2h 0≈A 0f (0)+A 1f (h )+A 2f(2h) 解:令f(x)=1,x,x 2代入有,【注:本例中需求解A 0、A 1、A 2共3个未知量,故需3个相异求积节点f(x)】 {A 0+A 1+A 2=2h A 1h +A 22h =1 2(2h )2A 1h 2+A 2(2h )2=1 3(2h )3 求解得A 0=13h ,A 1=43h ,A 2=1 3h , ∴求积公式为:∫f(x)dx 2h 0≈13hf (0)+43hf (h )+1 3 hf(2h) ∵该求积公式对3个相异节点1,x,x 2均有余项E (f )=0, //注:参见P149定理8.1 ∴该求积公式至少具有2次代数精度。 令f(x)= x 3,代入求积公式有:4 3hh 3+1 3h (2h )3=4h 4 ∵函数f(x) = x 3的定积分结果为:∫x 3dx 2h 0=1 4(2h )4=4h 4 ,与求积公式计算值相等, ∴该求积公式具有3次代数精度。
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ?? ? 令y s =)(θ,则1x y =
所以,系统的状态空间表达式及输出方程表达式为 []????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ????????????? ?----- =????????????????????????????? ?65432116543211111111 2654321000001000000 0000 0001001000000 000001 0x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 U 图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+--=?? ? 写成矢量矩阵形式为:
高等代数与解析几何同济答案 【篇一:大学所有课程课后答案】 资料打开方法:按住 ctrl键,在你需要的资料上用鼠标左键单击 资料搜索方法:ctrl+f 输入关键词查找你要的资料 【数学】 o o o o o o o o o o o o o o o o o
习题答案 o o o o o o o o o o o o o o o o o o o o 【计算机/网络/信息】 o
o o o 【经济/金融/营销/管理/电子商务】 o o o o o o o o o o o o 【 o o o o o
【篇二:各门课程课后答案】 式]《会计学原理》同步练习题答案 [word格式]《成本会计》习题及答案(自学推荐,23页) [word格式]《成本会计》配套习题集参考答案 [word格式]《实用成本会计》习题答案 [word格式]《会计电算化》教材习题答案(09年) [jpg格式]会计从业《基础会计》课后答案 [word格式]《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先) [word格式]《宏观经济学》习题答案(第七版,多恩布什) [word格式]《国际贸易》课后习题答案(海闻 p.林德特王新奎) [pdf格式]《西方经济学》习题答案(第三版,高鸿业)可直接打印 [word格式]《金融工程》课后题答案(郑振龙版) [word格式]《宏观经济学》课后答案(布兰查德版) [jpg格式]《投资学》课后习题答案(英文版,牛逼版) [pdf格式]《投资学》课后习题答案(博迪,第四版) [word格式]《微观经济学》课后答案(高鸿业版) [word格式]《公司理财》课后答案(英文版,第六版) [word格式]《国际经济学》教师手册及课后习题答案(克鲁格曼,第六版)
第九章非线性控制系统简介 1 主要内容简介 Description Function(描述函数)Lyapunov(李亚普诺夫)稳定性分析 2 简介简介回顾非线性系统特点 研究非线性系统的意义与方法典型非线性特性的数学描述 3 简介 1. 回顾 到目前为止前面的分析与设计都是基于线性系统的. 许多实际系统在某个操作点附近都可以近似为线性系统. 但是 非线性特性问题仍然不容忽视,本章就非线性控制进行简要介绍. 4 简介 x1 t y1 t x 2 t y 2 t 2. 非线性系统特点 a1 x1 t a 2 x 2 t a1 y1 t a 2 y 2 t 非线性系统与线性控制系统相比,具有一系列新的特点 1 线性系统满足叠加原理,而非线性控制系统不满足叠加原理(指同时满足叠加性与均匀性 虽然非线性系统通过利用非线性滤波,可使系统满足叠加性(如图示),但不可能满足均匀性。滤波器 I 非线性器件 I X1X2 Y1+Y2 滤波器 II 非线性器件 II 带滤波器的非线性系统 5 简介 2. 非线性系统特点非线性系统与线性系统相比,具有一系列新的特点:2 非线性系统的稳定性不仅取决于系统的固有结构和参数,而且与系统的初始条件以及外加输入有关系 对非线性系统而言,稳定性总是针对某一平衡点(状态)讨论的。 所谓平衡点(状态): xt f x t 设 f x t 0 求出满足的所有xe 即为非线性系统的平衡点 6 简介 2. 非线性系统特点例:对于一由非线性微分方程 x x 1 x 描述的非线性系统,显然有两个平衡点,即x10 和 x21。将上式改写为 dx 设t=0时,系统的初态为x0。积分上式可得 dt x 1 x x0 e t xt 1 x 0 x 0 e t xt 若初始条件x0<1,随着时间 1 t t xt0,即平衡状态x10 x0 ln 是小范围稳定的 当x0>1时, x0 1 0 在tlnx0/x0-1时, xt 这说明x21是不稳定的平衡状态。 一阶非线性系统 7 简介自激振荡(自振):没有外界周期变化信号 的作用时,系统内产生的具有固定振幅和频 2. 非线性系统特点 率的稳定周期运动。非线性系统与线性系统相比,具有一系列新的特点: 3 非线性系统可能存在自激振荡现象(即维持等幅振荡运动) 对于二阶非线性系统,这种自激振荡状态称为极限环。 4 非线性系统在正弦信号作用下,其输出存在极其复杂的情况: 跳跃谐振和多值响应 A 2 2 3 1 . 4 4 .5 跳跃谐振与多值响应 8 简介 2. 非线性系统特点分频振荡和倍频振荡 非线性系统在正弦信号作用下,其稳态分量除产生同频率振 荡外,还可能产生倍频振荡和分频振荡。如图所示波形。输入信号 t倍频信号 t分频信号 t 倍频振荡与分频振荡 9 简介 3. 研究非线性系统的意义与方法研究非线性系统的意义1)实际的控制系统,存在着大量的非线性因素。这些非线性因素的 存在,使得我们用线性系统理论进行分析时所得出的结论,与实际 系统的控制效果不一致。线性系统理论无法解释非线性因素所产生 的影响。2)非线性特性的存在,并非总是对系统产生不良影响。 10 简介 3. 研究非线性系统的意义与方法研究非线性系统的方法 1)相平面法是用图解的方法分析一阶,二阶非线性系统的方法。通过绘制控制系统相轨迹,达到分析非线性系统特性的方法。 2)描述函数法是受线性系统频率分析法启发,而发展出的一种分析非线性系统的方法。它是一种谐波线性化的分析方法,是频率法在非线性系统分析中的推广。3)计算机求解法是利用计算机运算能力和高速度求解非线性微分方程的一种数值解法。 11 简介 3. 研究非线性系统的意义与方法常见的非线性特性:继电特性
目录 自动控制原理习题 (2) 第一章控制系统导论 (3) 第二章控制系统的数学模型 (4) 第三章状态空间模型 (6) 第四章反馈控制系统的特性 (8) 第五章反馈控制系统的性能 (9) 第六章反馈控制系统的稳定性 (11) 第七章根轨迹法 (12) 第八章频率响应方法 (21) 第九章频率稳定性 (27) 第十章控制系统设计 (32) 第十一章非线性系统 (35)
自动控制原理习题 章节页码基础习题增强习题 Matlab 习题第一章控制系统导论P20 E1.1、P1.7、P1.11 第二章控制系统的数学 模型P82 E2.4、E2.5、E2.8、E2.26、 P2.7、P2.8 P2.36 MP2.4 第三章状态空间模型P142 E3.3、E3.11、P3.1 P3.14 MP3.5 第四章反馈控制系统的 特性 P180 E4.1、E4.4、P4.8 AP4.8 MP4.2 第五章反馈控制系统的 性能 P235 E5.2、E5.4、P5.4 AP5.4 MP5.5 第六章反馈控制系统的 稳定性 P273 E6.4、E6.6、P6.6 AP6.3 MP6.2 第七章根轨迹法P325 E7.1、E7.6、E7.12、E7.14、 E7.20、P7.1、P7.3、P7.13 AP7.3 MP7.2 第八章频率响应方法P387 E8.1、E8.3、E8.5、P8.1、 P8.6、P8.15、P8.17、P8.24 AP8.4 MP8.5 第九章频率稳定性P453 E9.1、P9.1、P9.2、P9.4 AP9.1 MP9.2 第十章控制系统设计 两道题 见后注意:Bode图必须采用对数坐标纸绘制,根轨迹用直角坐标纸绘制。 第十一章非线性系统 一道题 见后 [说明]: 1、教材:《.现代控制系统》(第八版)[美]Richard C. Dorf 等著,谢红卫等译。高等教育出版社,2001.6。 2、基本题型必须完成,增强题型选作。 3、Matlab题型选作,并以*.m的形式发到邮箱:ligang@https://www.doczj.com/doc/5a13127185.html,。
网络控制系统与传统控制系统区别 摘要:本文对网络控制系统与传统控制系统发展过程,功能特点,主要方法和当前研究热点进行了简要概述。 关键词:网络控制系统传统控制系统区别 1.前言 随着计算机技术和网络技术的不断发展,控制系统正在向智能化、数字化和网络化的方向发展。本文简要回顾了控制网络的发展, 阐述了它与信息网络发展过程的相似性,分析了目前流行的现场总线控制系统的组成及其存在的问题。对于工业以太网做了简单介绍,提出了控制网络结构发展的趋势。 2.计算机控制系统的发展 计算机及网络技术与控制系统的发展有着紧密的联系。最早在50年代中后期,计算机就已经被应用到控制系统中。60年代初,出现了由计算机完全替代模拟控制的控制系统,被称为直接数字控制(Direct Digital Control, DDC )。70年代中期,随着微处理器的出现,计算机控制系统进入一个新的快速发展的时期,1975年世界上第一套以微处理为基础的分散式计算机控制系统问世,它以多台微处理器共同分散控制,并通过数据通信网络实现集中管理,被称为集散控制系统(Distributed Control System, DCS)。 进入80年代以后,人们利用微处理器和一些外围电路构成了数字式仪表以取代模拟仪表,这种DDC的控制方式提高了系统的控制精度和控制的灵活性,而且在多回路的巡回采样及控制中具有传统模拟仪表无法比拟的性能价格比。 80年代中后期,随着工业系统的日益复杂,控制回路的进一步增多,单一的DDC控制系统已经不能满足现场的生产控制要求和生产工作的管理要求,同时中小型计算机和微机的性能价格比有了很大提高。于是,由中小型计算机和微机共同作用的分层控制系统得到大量应用。 进入90年代以后,由于计算机网络技术的迅猛发展,使得DCS系统得到进一步发展,提高了系统的可靠性和可维护性,在今天的工业控制领域DCS仍然占据着主导地位,但是DCS不具备开放性,布线复杂,费用较高,不同厂家产品的集成存在很大困难。 从八十年代后期开始,由于大规模集成电路的发展,许多传感器、执行机构、驱动装置等现场设备智能化,人们便开始寻求用一根通信电缆将具有统一的通信协议通信接口的
第九章非线性控制系统 一、非线性控制系统的基本概念 实际的控制系统中都存在非线性元件,或者一些部件的特性中含有非线性特性。在一些系统中,还人为的加入非线性元件来改善系统性能。因此严格的讲,几乎所有的控制系统都是非线性的。当非线性程度较小,可以用线性化的方法来处理。这种非线性称为非本质非线性。当控制系统中非线性程度较强时,用线性化方法来研究系统会带来很大的误差,甚至会得到错误的结论。这种非线性称为本质非线性。本质非线性特性有死区特性、继电特性等。死区特性将使系统出现较大的稳态误差。饱和特性会降低系统的超调量,有时会引起稳定振荡。间隙特性可使系统的振荡加剧,静差也会增大。有时也会使系统不稳定。 与线性系统相比,非线性系统有以下几个特点: 1.线性系统可以采用叠加原理,而非线性系统则不能。 2.线性系统的稳定性与初值和系统的输入无关。而非线性系统则有关。 3.线性系统可以写出通解形式,而非线性系统则不能。 4.非线性系统的稳定性和响应形式,除了与系统结构和参数有关外,还和系统的初始 条件有关。非线性系统的平衡点可能不止一个,可能在某个局部范围稳定,在另一 个范围却不稳定。故对非线性系统来说,不能笼统地说系统是否稳定,而只能说明 系统在多大范围内的稳定性。 5.非线性系统的输出响应,除了收敛和发散两种运动状态外,还会产生与输入幅值, 频率和自身结构参数有关的稳定的自振运动。 6.非线性元件的正弦响应会产生非线性畸变,输出响应中除了会有与输入同频率的基 波成分外,还有其它各种谐波分量。 二、描述函数法 描述函数是分析非线性系统的一种近似方法,它是线性系统理论中的频率特性法在非线性系统中的应用。它主要用于对一类非线性系统的稳定性分析及输出响应分析,此方法不受系统的阶数限制。 1.描述函数的基本概念 描述函数是非线性元件在正弦输入作用下的输出响应用一次谐波分量来近似,得到 非线性元件(环节)的等效近似频率特性。用描述函数法分析非线性系统有如下条 件。 1)非线性元件的特性具有奇对称性(一般的死区、饱和、间隙、继电等非线性特性均 有奇对称性)。 2)系统可简化成只有一个非线性环节和一个线性环节串联的典型单位反馈结构。 3)非线性环节输出中的高次谐波幅值小于一次谐波幅值。 4)线性部分的低通滤波性能很好。 2.描述函数N
郑州大学研究生课程(2012-2013学年第一学期)数值分析 Numerical Analysis 习题课 第八章常微分方程数值解法
待求解的问题:一阶常微分方程的初值问题/* Initial-Value Problem */: ?????=∈=0 )(] ,[),(y a y b a x y x f dx dy 解的存在唯一性(“常微分方程”理论):只要f (x , y ) 在[a , b ] ×R 1 上连续,且关于y 满足Lipschitz 条件,即存在与x , y 无关的常数L 使 对任意定义在[a , b ] 上的y 1(x ) 和y 2(x ) 都成立,则上述IVP 存在唯一解。 1212|(,)(,)||| f x y f x y L y y ?≤?一、要点回顾
§8.2 欧拉(Euler)法 通常取(常数),则Euler 法的计算格式 h h x x i i i ==?+1?? ?=+=+) (),(001x y y y x hf y y i i i i i =0,1,…,n ( 8.2 )
§8.2 欧拉(Euler)法(1) 用差商近似导数 )) (,()()()()(1n n n n n n x y x hf x y x y h x y x y +=′+≈+?? ?=+=+) (),(01a y y y x hf y y n n n n 差分方程初值问题向前Euler 方法h x y x y x y n n n ) ()()(1?≈ ′+)) (,() ()(1n n n n x y x f h x y x y ≈?+))(,()(n n n x y x f x y =′
非线性网络控制系统的分析与设计 文章针对具有未知输入和不确定扰动信号的非线性系统,研究一类以观测器为基础的量化网络化系统故障检测问题。首先,引入时变量化器,对输出信号采用离散量化处理。模拟工业中真是的非线性系统,针对基础的原系统建立故障检测滤波器,最后,通过原系统与观测器的比较,搭建故障检测滤波器误差系统。最后,给出Matlab仿真实例,验证文中方法的有效性。 标签:故障检测滤波器;网络化系统;量化器NCS 前言 NCSs是集自动控制技术、计算机技术和通信技术发展于一体,目前被越来越多的应用于复杂的远程控制系统中,从而实现对终端的远程控制,改变了传统的控制模式。 关于非线性的NCSs的建模和设计要复杂很多,无论是在数学模型的建立,还是工业控制方面的设计,相关的非线性的研究并不是很成熟。文章的设计方法将推广到非线性网络控制系统,设计关于非线性的模型,利用对数量化器联合分析。并最终MATLAB的仿真来判断文章的NCSs模型的稳定性。 1 离散对数量化器 信息在被传输过程中,要经过量化、分割,变为离散信号,才能适用与非线性模型中。这里,首先要将输出信号进行量化,量化分段函数如式(1): 文章中采用静态对数量化器,设计如下量化标准: 其中,?字是量化密度,u0是初始向量。 每一部分分段函数对应着不同的量化条件,最终应用到整个分段函数达到全部的量化标准。对数量化器定义如式(2): 2 系统描述 非线性被控对象描述为: (3) 其中,A、B1、B2、C、N1为具有适当维数的已知实常数矩阵, 为状态向量,为输出向量,为L2范数有界的不确定扰动信号向量,为要检测的故障信号向量,g(x(k))为已知的非线性向量函数且满足g(0)=0