经纬仪测角原理及动态测角精度
瞿惠
(大学精密机械工程系 200072)
摘要:现代经纬仪具有实时测量、高精度、自动跟踪监控和易于图像再现等优点。根据光电经纬仪的工作状态, 其测量误差又可以分为静态误差和动态误差。本文研制了测量用旋转靶标,靶标即可以提供以一定角速度或角加速度运动的空间仿真目标,又能够记录目标的实时空间位置,以靶标记录的数据为真值,光电经纬仪跟踪目标所测量的数据与真值比较,可得到光电经纬仪的动态测角精度。
关键词: 经纬仪;动态测角精度;旋转靶标
Angle measuring principle and dynamic angle precision of
Theodolite
Quhui
(Department of Precision Mechanical Engineering, Shanghai University, Shanghai 200072) Abstract: Modern theodolite has many advantages, such as real - time measurement , high accuracy,
auto - tracking monitoring and easy image reconstruction . According to working status of the theodolite, its measuring error can be divided into static state error and dynamic state error .Rotary target was established, and it was used to test dynamic angle precision of photoelectric theodolite in laboratory ,Simulation aim was provided and space positions of aim were real—time recoded by target.The aim can move as definite angle speed or as max angle acceleration.Data of target was considered as real—Value of aim.Test date of photoelectric theodolite was compared with it.and the dynamic angle precision was obtained.
Key words: theodolite;dynamic angle precision;rotary target.
1 引言
经纬仪是采用电视测量技术,具有自动跟踪和实时测量功能的光电测量设备,主要用于飞机、轮船、星体等特种试验场空间目标运动轨迹的测量。动态测角精度是指光电经纬仪在规定的角速度和角加速度运动状态下,实时测量的目标空间指向值与真值之差,是衡量光电经纬仪最重要的技术指标之一。长期以来,光电经纬仪的动态测角精度一直在外场,通过实测某一飞行目标并与其它高精度设备比对的方法进行验证。由于外场试验受气候、费用、时间等条件的限制,无法经常进行,因此,研究室测量方法和测量设备是非常必要和急需的.
2 电子经纬仪的测角原理
一般来说,我们将电子经纬仪的测角原理分为增量式和绝对式两种。增量式基于光栅莫尔条纹原理,其最终读数在仪器回转过程中形成,往往有一个最大回转速度的限制。绝对式基于码盘原理,
其读数与回转过程无关,在瞄准目标以后读取。
2.1光栅莫尔条纹测角原理(增量式)
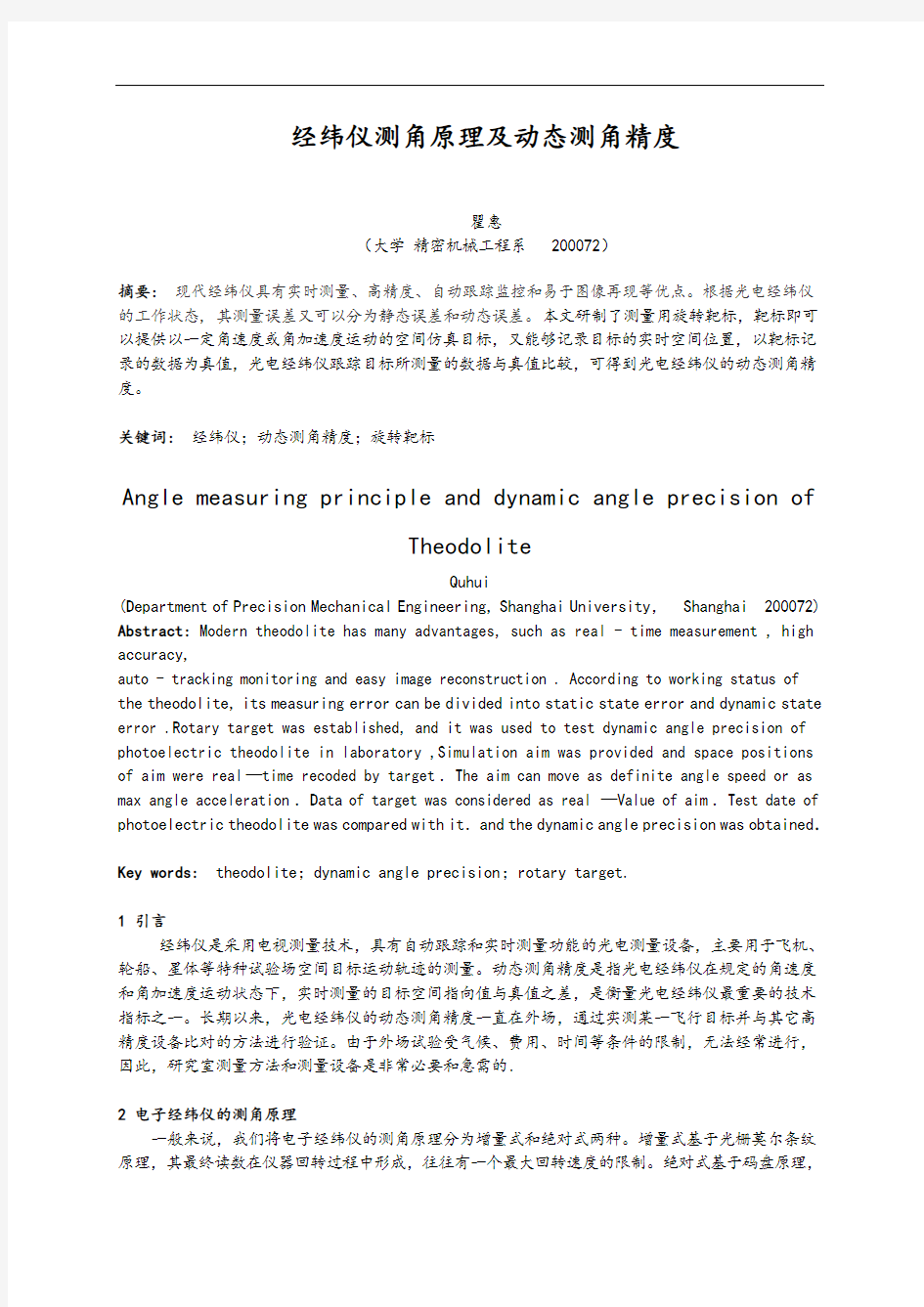
光栅是指均匀刻有间隔很小栅线的光学玻璃。若栅线刻在度盘上,就构成了光栅度盘(如图1所示),光栅度盘的栅线可以是直线,也可以是曲线。在电子经纬仪的光栅度盘上刻的都是辐射状的直线,辐射中心通常与圆度盘的圆心重合,因此也叫做中心辐射光栅度盘见图1。另外,如按光栅使用特性,可分为相位光栅和振幅光栅,按光栅度盘的光学原理,可分为透射光栅和反射光栅。
图1 光栅度盘(局部)图2莫尔条纹
在电子经纬仪中要实现测角,通常要由两个光栅度盘组成,其中一个称为主光栅,另一个称为指示光栅。利用光栅度盘测角就是要测定从起始方向两光栅度盘相对移动的光栅数,因此这种测角方式也称作增量式测角方式。当两个间隔相同的光栅相迭并成很小的交角,当它们相对移动时可以看到明暗相间的干涉条纹(如图2所示),称为莫尔干涉条纹,简称莫尔条纹。
设B为条纹宽度,w为栅距,θ为两光栅的交角,则近似可得
B=w/(2*tg(θ/2))
一般来说,θ很小,故上式可简化为
B=w/θ
因此,莫尔条纹宽度B与栅距w之比而定义的莫尔条纹放大倍数K为
K=B/w=1/θ
由于θ很小,因此K值很大,也就是说,莫尔条纹起着放大作用,这样大大提高了分辨率。而且θ越小,K值越大。由此可见,要想知道光栅相对移动的数目,只要测出奠尔条纹的移动数目。当光栅相对移动一个栅距w时,莫尔条纹就沿近于垂直于光栅相对移动的方向移动一个条纹宽度B。当光栅移动方向改变时,莫尔条纹的移动方向也随之改变。
光栅度盘的读数系统采用发光二极管和光电二极管进行光电探测(如图3所示),在光栅度盘的一侧安置一个发光二极管,而在另一端正对位置放置安装一光电接收二极管。当两光栅度盘相对移动时,就会出现莫尔条纹的移动,莫尔条纹正弦信号就会被光电二极管接收,并通过整形电路转换成矩形信号,该信号的变化周期可由计数器得到。计数器的二进制输出信号通过总线系统被输入到存储器,并由数字显示单元以十进制数字显示出来.
图3读数系统
光栅常数一般为1′或2′ (考虑到仪器的大小及刻划的难度)。所以要求用电子技术进行细分以达到秒级精度。近代,莫尔条纹的细分均采用微机,大大提高了细分倍数。为了细分和判向的需要,同时采用四相信号,分别为Sin、Cos、一Sin、一Cos。所谓细分实际就是根据采集到的Sin、Cos信号的值来反推读数的位置值。莫尔信号以一个栅距为周期。对于2′栅距的光栅,需细分120,才能得到1″的分辨率,即每3°(360°/120)一个值,实际处理过程如图4所示。
图4细分处理过程
根据正切函数的周期性,可将整个莫尔信号周期分成八个区,每个区45°,所以只需存入15个值的正切函数表就可达到1″的分辨率。
2.2绝对式测角原理
从光学经纬仪到电子经纬仪,人们首先考虑到的是将光学经纬仪的度盘分划转换成一定的编码,再将编码通过一定的读数系统自动转换成相应的角值。通过对编码方法的改进和光、电技术的发展使编码测角技术日趋完善,并成为电子测角的主要方法。大家知道,因二进制可以表示任何状态并可以由计算机来识别。将光学度盘经过刻划造成透光和不透光两种状态可以分别看作是二进制代码的逻辑“1”和“0”。二进制位数越多,能表达的状态数也越多。纯二进制码就是按二进制的大小依次构成编码度盘的各不同状态。
图5 编码度盘图6编码度盘读数系统
如图5所示,这里一圈称为一码道。为了提高分值的分辨率,就必须增加度盘的等分数和相应的码道数。若码道数为n,则整个度盘能表示的状态数为S=2 ,分辨率为σ=360°/2“。如图5将度盘分为十六份,所能表示的状态数S=16,要求码道数为四,分辨率为a=22.5°。从理论上说,为了达到足够的分辨率,可以再增加码道数和相应的刻划,但实际上受到某些因素的制约,主要有以下两个方面:
(1)将码盘信息经光电转换化成方向值的接收器件不可能无限小,因此,码道数越多,势必要使度盘直径越大。
(2)受仪器体积的限制,度盘半径不可能很大,一般度盘半径小于100mm,如TC1为80mm,Lta为98mm,AGA710为70mm,GTS一310为71mm等。因此,要提高编码度盘的测角分辨率,必须引进测微技术。角度电子测微技术是运用电子技术对交变的电信号进行插,从而提高计数脉冲的频率,达到细分效果。本文就不作介绍。
一般来说,码盘有纯二进制码盘、莱码盘、矩阵码盘等多种形式,各种码盘的编码方式都不一样,但实际仪器中往往将各种编码方法组合在一起,并且随着编码度盘刻划技术和读数系统的改进,在新型的仪器中还出现了一些变异的编码度盘。近代电子经纬仪已完全摒弃了那种传统的多码道码盘,一般采用一个码道来确定角度的绝对值,即所谓的单码度盘,这是Wild创导的全新原理,便于度盘的制造,但是对清洁度要求很高。编码度盘的读数系统如图6所示。
在编码度盘的每一个码道上方安置一个发光二极管,在度盘的另一侧正对发光二极管的位置安放有光电接收二极管。当望远镜照准目标时,由发光二极管和光电二极管构成的光电探测器正好位于编码度盘的某一区域,发光二极管照射到由透光和不透光部分构成的编码上时,并经光电二极管就会产生电压输出或零信号,即二进制的逻辑“1 ”和逻辑“0”。这些二进制编码的输出信号通过总线系统存入到一个存储器中,然后通过译码器并由数字显示单元以十进制数字显示出来。除此之外,还有一种编码度盘不是采用光学度盘刻成透光与不透光码道,而是将码道制成导电与不导电来表示逻辑“1”和逻辑“0”,其相应的读数系统不是采用光电接收而是用金属接触片探测是否导电来获取度盘信息。
3 经纬仪动态测角精度的测量
动态测角精度是指经纬仪在规定的角速度和角加速度运动状态下,实时测量的目标空间指向值与真值之差,是衡量经纬仪最重要的技术指标之一。长期以来,经纬仪的动态测角精度一直在外场,通过实测某一飞行目标并与其它高精度设备比对的方法进行验证。由于外场试验受气候、费用、时
间等条件的限制,无法经常进行,因此,研究室测量方法和测量设备是非常必要和急需的。
3.1旋转靶标的组成
图7为旋转靶标结构示意图,主要由支撑架、旋转轴系、平行光管、反射镜、电气控制柜等部分组成。
图7靶标结构不意图
支撑架的主要作用是稳定支撑旋转目标,为了便于移动,支撑架底部设计有万向移动鼓轮和三点式落地支撑地角。旋转轴系主要由精密转轴、直流伺服电机、导电环和23位绝对式编码器组成,旋转轴的作用是带动平行光管和反射镜转动,产生以一定角速度和角加速度运动的目标,并通过同轴安装的编码器,准确地得到靶标目标的空间角度位置。平行光管的焦距为lm,口径100mm,目标形式为星点。平行光管出射的光经反射镜反射后,在空间形成一光锥形目标,提供给经纬仪。
电气控制柜中有主控计算机、时统终端、编码器数据采集电路、串行通讯电路、伺服控制电路、电源等相关硬件。经纬仪和靶标由各自的时统终端通过GPS授时功能对时。靶标编码器的采样频率可以根据测量需要,设定为与光电经纬仪的工作频率相同,有400Hz、200Hz、1 00Hz、50Hz供选择。实际测量时,主控计算机在时统终端同步信号的控制下,实时同步采集并记录绝对时和编码器值,同时光电经纬仪自动跟踪靶标目标并同步采集绝对时、目标的方位角、俯仰角和脱靶量等测量数据。事后,按已建立的动态测角误差计算公式完成光电经纬仪的动态测角精度计算。
3.2靶标与光电经纬仪的坐标变换关系
图2为靶标与光电经纬仪的坐标变换关系图,图中,O点为光电经纬仪三轴旋转中心,定义该点为坐标原点,a为靶标旋转半锥角,b为靶标旋转轴与水平面的夹角,A为光\电经纬仪的方位角,E为光电经纬仪的俯仰角。设靶标目标位于空间最高点S0处的编码器值为零值,当目标从S。点旋转至S.点,靶标编码器的角度为0。依据球面三角定理可得
E=arcsin(cosasinb+sinacosbcosθ) (1)
A=arcsin(sinasinθ/cosE) (2)
实际应用中,经测量:a=22.5°,b=42.5°,代入公式(1)和(2)有:
E=arcsin(k1+k2cosθ) (3)
A=arcsin(k3sinθ/cosE) (4)
式中,k1、k2k3为常数。由公式(3)和(4)可知,已知靶标编码器角度值θ,便可计算出靶标日标相对于经纬仪坐标系下的方位角和俯仰角,该计算值可以作为靶标目标实时空问指向的真值。
3.3旋转靶标精度分析
旋转靶标作为动态测角精度检测设备,必须对其精度进行标定,按照误差理论,靶标应该具有高于被测量设备3~10倍的精度。靶标的精度按其运动方式可分为静态精度和动态精度,标定靶标静态精度所用仪器为精度0.5″的Leica经纬仪,标定靶标动态精度所用仪器为精度0.2”数显式自准直仪,自动采样频率50Hz。
3.3.1靶标静态精度标定
首先,校正靶标编码器的零点。用Leica经纬仪分别测量靶标编码器在0°和180°位置的目标空间指向角度值(AI、E1)和(A2、E2),多次测量取平均值,计算两点的方位差值,如果不为零,说明靶标编码器的零点存在偏差,目标在±(A1.A2)/2位置将编码器重新清零,复测两点的方位差值,直至小于0.5″。根据测量结果计算靶标的参数a和b:
a=(E1-E2)/2 (5)
b=(E1+E2)/2 (6)
之后,在靶标编码器0°~360°围,每隔10°测量一点,共获得36组靶标编码器值和Leica经纬仪测量值的对应数据,将靶标编码器值通过公式(3)和(4)转换为空间指向值(Ai′、Ei′),以Leica经纬仪的测量值(Ai、Ei)为真值,计算靶标空问指向值相对于该真值的均方差,既是靶标的静态精度:
经测量,靶标的静态精度:σA=2.7″,σE=1.5″。
3.3.2靶标动态精度标定
靶标在运动过程中,主要有下列误差源:轴系晃动误差;编码器动态测角误差;支撑基座的稳定性;旋转臂(平行光管和反射镜)机械变形误差;编码器零点校正误差;a和b角测量误差。其中,编码器零点校正误差;a和b角测量误差己包含在静态测量结果中,不需要再单独测量。测量靶标轴系晃动误差时,在靶标旋转轴一端,垂直于旋转轴固定一平面反射镜,在靶标旋转过程中,用自准直仪实时监测反射镜的角度变化量,该变化量既是靶标的轴系晃动误差,实测σx =0.76″、σy =0.37″。编码器动态测角误差经验值小于1°。通过在24小时对靶标固定目标的定时监测,得到支撑基座定性小于2″。旋转臂机械变形误差经验值小于0.5″。将以上各动态误差和静态误差进行合成,得到靶标的动态精度,σA=3.6″,σE=2.8″。因此,应用该靶标可以测量动态精度至少比靶标低3倍的经纬仪
4 结论
应用旋转靶标,在室测量了光电经纬仪的动态测角精度。通过对靶标正弦运动规律的分析,实现了在要求的跟踪角加速度条件下,对光电经纬仪俯仰动态测角精度的测量。测量结果表明:旋转靶标具有可编程控制和实时测量的特点,是测量光电经纬仪动态测角精度必不可少的测量设备,可广泛应用于具有自动跟踪性能的光电测量设备。旋转靶标还可以测量光电跟踪设备的跟踪性能、捕获性能和静态测角精度等其它技术参数,值得开发和利用。
水平角观测(经纬仪原理) 一、水平角测角原理 如图3—9所示,A、B、C为地面三点,高程不相等。将这三点沿铅垂线方向投影到PQ水平面上,在水平面上得到A1、B1、C1三点,则水平成B1A1与B l C1夹角β定义为地面上直线BA和BC间的水平角。由此可见,地面任意两直线间的水平角度,为通过该两直线所作竖直面间的两面角。 为了能测出水平角的大小,可在此两竖直面的交线上任一高度0点水平地放置一刻度盘,通过BA和BC和一竖直面,与刻度盘的交线为0m、0n,在刻度盘上相应的读数为b和a,从而求得水平角。 β=a—b (3—1) 根据以上分析,测量水平角的经纬仪必须具备一个水平度盘,并设有能在刻度盘上进行读数的指标;为了瞄准不同高度的目标,经纬仪的望远镜不仅能在水平面内转动,而且还能在竖直面内旋转。 图3—4水平角测量 二、经纬仪原理 经纬仪有游标经纬仪、光学经纬仪和电子经纬仪三类。游标经纬仪一般为金属度盘、游标读数、锥形轴系,目前已很少使用。电子经纬仪尚未普及,而光学经纬仪具有读数精度高、体积小、重量轻、使用方便和密封性能好等优点被广泛使用,下面对光学经纬仪、电子经纬仪作简要介绍。 1.J6级光学经纬仪 如图3—5是北京光学仪器厂生产的红旗Ⅱ型经纬仪。各部件的名称均标注在图上。理论上,一测回测角中误差为6″,故称为6秒级经纬仪,它属于较低精度的经纬仪,一般用于五等以下的控制测量和其他较低精度的测量工作。 J6经纬仪是由基座水平度盘和照准部三部分组成的。 基座上有三个脚螺旋6用来整平仪器。5是轴座连接螺旋,拧紧它可以将仪器固定在基座上,该螺旋不要松动,以免仪器分离而坠落。 水平度盘外面看不见,它是一个玻璃制成的圆环,盘上按顺时针方向刻有分划,从0°—360°,用来测量水平角。
姓名: 班级:地球物理1701班学号:0110170 实验一经纬仪认识与使用 一、实验名称:经纬仪认识与使用 二、实验目的与要求: 1、了解光学经纬仪的基本构造,各部件的名称和作用。 2、掌握经纬仪对中、整平、瞄准和读数的基本方法。 三、实验仪器: 经纬仪1台,三脚架1个。 四、实验内容: 1、熟悉经纬仪的构造,熟悉各部件功能及使用; 2、掌握经纬仪对中整平方法; 3、熟悉经纬仪测角的流程; 4、掌握经纬仪测水平角、垂直角的瞄准方法; 5、按物理实验报告格式,独立编写并提交一份实验报告。 五、实验原理与方法: 1、经纬仪的构造及各部件功能及使用方法 DJ6 经纬仪由三部分组成:照准部、水平度盘、基座组成。各部件名称如图1 所示。 图 1 经纬仪各部件名称 1)各部件功能及使用各种旋钮的作用与经纬仪基本一致,在实验过程中进一步加深认识。
水平制动螺旋:粗瞄后制动,照准部则不能转动;水平微动螺旋:水平 制动螺旋制动后,水平微动螺旋可以小范围微动, 用于精确照准目标;竖直制动螺旋: 粗瞄后制动,望远镜则不能转动; 竖直微动螺旋:竖直制动螺旋制动后,竖直微动螺旋可以小范围微动, 用于精确照准目标; 脚螺旋:用于对中和整平仪器; 物镜调焦螺旋:旋转该螺旋,进行物镜调焦,看清目标成像。目 镜调焦螺旋:旋转该螺旋,进行目镜调焦,看清十字丝成像。指 标水准管调节螺旋:调节该螺旋,使指标水准管气泡居中。反光 镜:360 度转动反光镜,是读数窗的亮度最大。 光学对点器:用于仪器对中。 2、经纬仪使用方法 使用经纬仪进行角度测量,按以下流程进行:安置仪器—仪器对中整平—瞄准——读数。如果是垂直角测量,在读数前应使指标水准管气泡居中。 1)对中整平 (1)安置仪器 将三脚架成正三角形打开,测站点在三角形中心,架头大致水平,拧紧固定螺旋将仪器安置在架头上。 (2)精确对中如果测站点位未出现在光学对点器视野中,可两手各握住一个脚架架腿移动脚架,使测站点位大致位于对点器标识圆圈附近,最后用脚螺旋精确对中。 (3)粗略整平 33
经纬仪原理及角度测量方法 内容:理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。 重点:光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法; 难点:光学经纬仪的检验与校正。 § 3.1 角度测量原理 角度测量(angular observation) 包括水平角(horizontal angle) 测量和竖直角(vertical angle) 测量。 一、水平角定义 从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。其范围:顺时针0°~360°。 二、竖直角定义 在同一竖直面内,目标视线与水平线的夹角,称为竖直角。其范围在0°~±90°之间。如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§ 3.2 光学经纬仪(optical theodolite ) 经纬仪是测量角度的仪器。按其精度分,有DJ6 、DJ2 两种。表示一测回方向观测中误差分别为6"、2"。 一、DJ6 光学经纬仪的构造 DJ6 光学经纬仪图 1、照准部(alidade) 2、水平度盘(horizontal circle) 3、基座(tribrach) 二、J6的读数方法 1、J6 经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ( 即:6") 。如图,水平度盘读数为:73°04ˊ24"。 2、“ H ”——水平度盘读数,“ V ”——竖直度盘读数。 三、J2 光学经纬仪的构造
经纬仪的认识与使用实验报告 篇一:实验二经纬仪的认识与使用 实验二经纬仪的认识与使用 1.目的 (1)了解DJ6光学经纬仪的基本结构及主要部件的名称和作用。(2)掌握经纬仪基本操作和读数方法。2.组织 每组8一10人。每组每位同学完成经纬仪的整平、对中、瞄准、读数工作 各一次。3.学时 课内2学时4.仪器及用具 每组DJ6光学经纬仪1台、花杆2个。5.实验步骤提要 整平、对中经纬仪——瞄准测钎——读水平度盘。 5)学会DJ6光学经纬仪的读数方法。读数记录于“读数记录表”中。 6)练习配置水平度盘的方法。
7.实验记录及上交资料: 每人交1份实验报告。 实验三测回观测法测水平角 1.目的 1)掌握水平角观测原理,经纬仪的 构造及度盘读数。2)掌握测回法测水平角的方法。2.组织 每组4-5人,每人用测回法完成一个水平角的观测任务。3.学时课内2学时4.仪器及用具: 每组DJ6光学经纬仪1台、花杆2个、记录板1个。5.实验步骤提要1)度盘配置:设共测n(n=4或5)个测回,则第i个测回的度盘位置为略大于(i-1)×180°/n。2)一测回观测:(1)盘左:瞄准左目标A,进行读数记a1;顺时针方向转动照准部,瞄准 右目标B,进行读数记b1;计算上半测回角值β 左= b1- a1。 (2)盘右:瞄准右目标B,进行读数记b2;逆时针方向转动照准部,瞄准
左目标A,进行读数记a2;计算下半测回角值β 右= b2- a2。 左-β右)/2。 (3)检查上、下半测回角值互差是 否超限。计算一测回角值β=(β 3)测站观测完毕后,当即检查各测 回角值互差是否超限,计算平均角值。6.注意事项 1) 瞄准目标时,尽可能瞄准其底部,以减少目标倾斜引起的误差。2) 同一测回观测时,切勿转动度盘变换手轮,以免发生错误。3)观测过程中若发现气泡偏移超过一格时,应重新整平重测 该测回。4)计算半测回角值时,当左 目标读数a大于右目标读数b时,则应加360°。 5)限差要求为:对中误差小于3㎜;上、下半测回角值互差不超过±40”,超限重测该测回;各测回角值互差不超过 ±24”,超限重测该测站。7.上交实验记录
§3.2 精密光学经纬仪的构造及使用法 控制测量中,需用经纬仪进行大量的水平角和垂直角观测。使用经纬仪进行角度观测,最重要的环节是:仪器整平、照准和读数。我们围绕这三个环节,对光学经纬仪的构造和使用法作如下介绍。 3.2.1 水准器 由前节可知,测角时必须使经纬仪的垂 直轴与测站铅垂线一致。这样,在仪器结 构正确的条件下,才能正确测定所需的角 度。要满足这一要求,必须借助于安装在 仪器照准部上的水准器,即照准部水准器。 照准部水准器一般采用管状水准器。管水 准器是用质量较好的玻璃管制成,将玻璃 管的壁打磨成光滑的曲面,管注入冰点低, 流动性强,附着力较小的液体,并 图3-3 水准轴与水准器轴 留有空隙形成气泡,将管两端封闭,就成 为带有气泡的水准器,如图3-3所示。 1. 水准轴与水准器轴 为了便于观察水准器的倾斜量,在水准管的外壁上刻有若干个分划,分划间隔一般为2mm,其中间点称为零点。 水准器安置在一个金属框架,并安装在经纬仪照准部支架上,所以把这种管状水准器称为照准部水准器。照准部水准器框架的一端有水准器校正螺旋,通过校正螺旋,使照准部水准器的水准器轴与仪器垂直轴正交。 所谓水准器轴,就是过水准器零点O,水准管壁圆弧的切线,如图3-3所示。另外, O 由于水准管的液体比空气重,当液体静止时,管气泡永远居于管最高位置,如图3-3中的' O作圆弧的切线,此切线总是水平的,我们称此切线为水准轴由此可知,位置。显然,过' O与水准器分划中心O重合,这时经纬仪的使其水准轴与水准器轴相重合,即气泡最高点' 垂直轴与测站铅垂线重合,这个过程称为整置仪器水平。 2. 水准器格值 我们知道,当水准器倾斜时,水准 管的气泡便会随之移动。不同的水准器, 虽然倾斜的角度完全相同,各自的气泡 移动量不会完全相同。这是因为不同的 水准器,它们的灵敏度不同。灵敏度以 水准器格值表示。所谓水准器格值,就 是当水准气泡移动一格时,水准器轴所 变动的角度,也就是水准管上的一格所 对应的圆心角。
使用经纬仪注意事项: ⑴安置仪器后,必须有人守在仪器旁,以免发生意外。 ⑵要养成轻手轻脚不乱碰仪器的习惯,保护仪器,亦可以增进测量 结果的精度。 ⑶仪器箱不可蹬坐。 ⑷测量进行中不能用手扶三脚架,以免对仪器施力,从而影响测量 结果的准确性。 ⑸仪器各螺旋不要拧得太紧,以免滑扣或损坏仪器 〔6转动仪器应先松开制动螺旋,不可未拧松制动螺旋,硬扳使其转动。 ⑺使用微动螺旋时,不能将螺旋杆拧到极限,这样不但会使弹簧压 入不能伸张,还会将螺旋压紧,难以扭回,失去微动作用,一应拧到适中的位置即可。 迁站注意事项: ⑴迁站前应先将脚螺旋恢复至适中高度,把经纬仪望远镜的镜面朝下竖直固定,各制动螺丝均略旋紧,以不能自转为宜,查点收好零件、用具记 录表等,将垂球放入衣袋,将仪器斜抱胸前,稳步前进。 ⑵迁距较远(迁站距离在500米以上时),仪器应装箱携带,通过机架密布、人多杂乱的工地,或陡险山地、攀登脚手架等处,均装箱迁站。 使用平板仪注意事项: ⑴平板仪的图板必须保持整洁与平滑、绘图纸应用胶条,贴在图板上,不 能用图钉,以免损坏图板。 ⑵照准仪自仪器箱中取出后应立即将箱盖关好。 ⑶平板仪之附件如水准器、磁针、对点器,比例尺等用毕应收于箱内,不
可随地乱放,以免遗失。 ⑷平板仪搬动时或用毕后,勿忘将磁针固定,以免损坏针尖。 ⑸凡有包裹的图板,用毕后一定要及时装入包中,以免损坏板面。 ⑹图板不能放于潮湿或炉火旁,以免板面发生弯曲变形 仪器开箱及安置注意事项: ⑴一般仪器如经纬仪及水准仪等,多用木箱或塑料箱装起,在开箱取仪器时,应仔细注意开启方法,凡应上下开启者,不可竖立打开, 以免仪器及附件掉出,损坏或遗失。 ⑵仪器箱中取出前应仔细观察并记住其摆放位置,取出或放入时, 应轻轻移动,勿使仪器震击。 ⑶开箱取仪器时,不可单手握拿望远镜或度盘,要双手握执仪器, 一手握紧仪器上部,另一手托住仪器基座部分。 ⑷仪器箱中的附件,全注于附件表上,使用时应注意附件名称及数量,不可遗失。 ⑸仪器自箱中取出后,一定要把仪器箱开好,以免遗失附件、进入灰尘、脏物。 ⑹仪器均有编号,使用时应注意仪器编号与三脚架编号相同才能装 上,编号不同者必须更换。 ⑺安置仪器时,要将中心螺旋旋紧,但不能过紧。 ⑻坡、坎、斜地支三脚架时,要一脚在上,两脚在下,以免不稳倾倒。 ⑼仪器安置在三脚架上,是否稳固,须时时留意,禁止闲人触及或走进仪器。
§3.2 精密光学经纬仪的构造及使用方法 控制测量中,需用经纬仪进行大量的水平角和垂直角观测。使用经纬仪进行角度观测,最重要的环节是:仪器整平、照准和读数。我们围绕这三个环节,对光学经纬仪的构造和使用方法作如下介绍。 3.2.1 水准器 由前节可知,测角时必须使经纬仪的垂 直轴与测站铅垂线一致。这样,在仪器结 构正确的条件下,才能正确测定所需的角 度。要满足这一要求,必须借助于安装在 仪器照准部上的水准器,即照准部水准器。 照准部水准器一般采用管状水准器。管水 准器是用质量较好的玻璃管制成,将玻璃 管的内壁打磨成光滑的曲面,管内注入冰 点低,流动性强,附着力较小的液体,并 留有空隙形成气泡,将管两端封闭,就成 为带有气泡的水准器,如图3-3所示。 1. 水准轴与水准器轴 为了便于观察水准器的倾斜量,在水准管的外壁上刻有若干个分划,分划间隔一般为2mm ,其中间点称为零点。 水准器安置在一个金属框架内,并安装在经纬仪照准部支架上,所以把这种管状水准器称为照准部水准器。照准部水准器框架的一端有水准器校正螺旋,通过校正螺旋,使照准部水准器的水准器轴与仪器垂直轴正交。 所谓水准器轴,就是过水准器零点O ,水准管内壁圆弧的切线,如图3-3所示。另外,由于水准管内的液体比空气重,当液体静止时,管内气泡永远居于管内最高位置,如图3-3中的'O 位置。显然,过'O 作圆弧的切线,此切线总是水平的,我们称此切线为水准轴由此可知,使其水准轴与水准器轴相重合,即气泡最高点'O 与水准器分划中心O 重合,这时经纬仪的垂直轴与测站铅垂线重合,这个过程称为整置仪器水平。 2. 水准器格值 我们知道,当水准器倾斜时,水准 管内的气泡便会随之移动。不同的水准 器,虽然倾斜的角度完全相同,各自的 气泡移动量不会完全相同。这是因为不 同的水准器,它们的灵敏度不同。灵敏 度以水准器格值表示。所谓水准器格值, 就是当水准气泡移动一格时,水准器轴 所变动的角度,也就是水准管上的一格 所对应的圆心角。 如前所述,水准管的内壁是一圆弧,圆弧的曲率半径愈大,水准管上一格所对应的圆图3-3 水准轴与水准器轴
经纬仪的原理与使用 一.角度测量的原理及相关基本概念 角度测量包括水平角测量和竖直角测量,其中水平角测量是用于测量地面点的位置,竖直角测量是用于间接测定地面点的高程。 (一)水平角的测量原理 水平角概念:从一点到两目标的方向线垂直投影在水平面上所成的角,β。如书图3-1。 为了测定水平角β,那么可设想在过角顶B点上方安置一个水平度盘,水平度盘上面带有顺时针刻划、注记。我们可以在BA方向读一个数n,在BC方向读一个数m,那水平角β就等于m减n,用公式表示为 β=右目标读数m-左目标读数n 水平角值为0~360°。 (二)竖直角的测量原理 竖直角概念:测站点到目标点的视线与水平线间的夹角,用α表示。如书图3-2:α为AB方向线的竖直角。其值从水平线算起,向上为正,称为仰角,范围是0°~90°;向下为负,称为俯角,范围为0°~-90°。 天顶距概念:视线与测站点天顶方向之间的夹角,图3-2中以Z 表示,其数值为0°~180°,均为正值。与竖直角的关系: α=90°-Z 为了测定天顶角或竖直角,那我们同测水平角类似,在A点安置一个竖直度盘,同样是带有刻划和注记。这个竖直度盘随着望远镜上下转动,瞄准目标后则有一个读数,那此读数就为竖直角。 根据上述角度测量原理,研制出的能同时完成水平角和竖直角测量的仪器称为经纬仪。经纬仪按不同测角精度又分成多种等级,如DJ1、DJ2、DJ6、DJ10等。D、J为“大地测量”和“经纬仪”的汉语拼音第一个字母,数字表示该仪器测量精度。DJ6表示一测回方向观测中误差不超过±6″。工程中常用的精度有2″、6″和10″。 二.DJ6型光学经纬仪 (一)基本构造:照准部,水平度盘,基座 (二)读数方法:最常见的读数方法有分微尺法、单平板玻璃测微器法和对径符合读法。下面分别说明其构造原理及读数方法。 1.分微尺法 分微尺法也称带尺显微镜法,多用于DJ6级仪器。由于这种方法操作简单,不含隙动差,其应用日广。如国产的TDJ6,Leica T16等
第六讲角度测量 第一节水平角测量原理 一、水平角的概念 相交于一点的两方向线在水平面上的垂直投影所形成的夹角,称为水平角。水平角一般用β表示,角值范围为0?~360?。
如图3-1所示,A 、O 、B 是地面上任意三个点,OA 和OB 两条方向线所夹的水平角,即为OA 和OB 垂直投影在水平面H 上的投影O 1A 1和O 1B 1所构成的夹角β。 二、水平角测角原理 如图3-1所示,可在O 点的上方任意高度处,水平安置一个带有刻度的圆盘,并使圆盘中心在过O 点的铅垂线上;通过OA 和OB 各作一铅垂面,设这两个铅垂面在刻度盘上截取的读数分别为a 和b ,则水平角β的角值为: a b -=β (3-1) 用于测量水平角的仪器,必须具备一个能置于水平位置水平度盘,且水平度盘的中心位于水平角顶点的铅垂线上。仪器上的望远镜不仅可以在水平面内转动,而且还能在竖直面内转动。经纬仪就是根据上述基本要求设计制造的测角仪器。 第二节 光学经纬仪的构造 O 图3-1 水平角测量原理
光学经纬仪按测角精度,分为DJ07、DJ1、DJ2、DJ6和DJ15等不同级别。其中“DJ”分别为“大地测量”和“经纬仪”的汉字拼音第一个字母,下标数字07、1、2、6、15表示仪器的精度等级,即“一测回方向观测中误差的秒数”。 一、DJ6型光学经纬仪的构造 DJ6型光学经纬仪主要由照准部、水平度盘和基座三部分组成。 1.照准部 照准部是指经纬仪水平度盘之上,能绕其旋转轴旋转部分的总称。照准部主要由竖轴、望远镜、竖直度盘、读数设备、照准部水准管和光学对中器等组成。 (1)竖轴照准部的旋转轴称为仪器的竖轴。通过调节照准部制动螺旋和微动螺旋,可以控制照准部在水平方向上的转动。 (2)望远镜望远镜用于瞄准目标。另外为了便于精确瞄准目标,经纬仪的十字丝分划板与水准仪的稍有不同,如图3-3所示。 图3-3 经纬仪的十字丝分划板 望远镜的旋转轴称为横轴。通过调节望远镜制动螺旋和微动螺旋,可以控制望远镜的上下转动。 望远镜的视准轴垂直于横轴,横轴垂直于仪器竖轴。因此,在仪器竖轴铅直时,望远镜绕横轴转动扫出一个铅垂面。 (3)竖直度盘竖直度盘用于测量垂直角,竖直度盘固定在横轴的一端,随望远镜一起转动。 (4)读数设备读数设备用于读取水平度盘和竖直度盘的读数。
经纬仪测角原理及动态测角精度 瞿惠 (大学精密机械工程系 200072) 摘要:现代经纬仪具有实时测量、高精度、自动跟踪监控和易于图像再现等优点。根据光电经纬仪的工作状态, 其测量误差又可以分为静态误差和动态误差。本文研制了测量用旋转靶标,靶标即可以提供以一定角速度或角加速度运动的空间仿真目标,又能够记录目标的实时空间位置,以靶标记录的数据为真值,光电经纬仪跟踪目标所测量的数据与真值比较,可得到光电经纬仪的动态测角精度。 关键词: 经纬仪;动态测角精度;旋转靶标 Angle measuring principle and dynamic angle precision of Theodolite Quhui (Department of Precision Mechanical Engineering, Shanghai University, Shanghai 200072) Abstract: Modern theodolite has many advantages, such as real - time measurement , high accuracy, auto - tracking monitoring and easy image reconstruction . According to working status of the theodolite, its measuring error can be divided into static state error and dynamic state error .Rotary target was established, and it was used to test dynamic angle precision of photoelectric theodolite in laboratory ,Simulation aim was provided and space positions of aim were real—time recoded by target.The aim can move as definite angle speed or as max angle acceleration.Data of target was considered as real—Value of aim.Test date of photoelectric theodolite was compared with it.and the dynamic angle precision was obtained. Key words: theodolite;dynamic angle precision;rotary target. 1 引言 经纬仪是采用电视测量技术,具有自动跟踪和实时测量功能的光电测量设备,主要用于飞机、轮船、星体等特种试验场空间目标运动轨迹的测量。动态测角精度是指光电经纬仪在规定的角速度和角加速度运动状态下,实时测量的目标空间指向值与真值之差,是衡量光电经纬仪最重要的技术指标之一。长期以来,光电经纬仪的动态测角精度一直在外场,通过实测某一飞行目标并与其它高精度设备比对的方法进行验证。由于外场试验受气候、费用、时间等条件的限制,无法经常进行,因此,研究室测量方法和测量设备是非常必要和急需的. 2 电子经纬仪的测角原理 一般来说,我们将电子经纬仪的测角原理分为增量式和绝对式两种。增量式基于光栅莫尔条纹原理,其最终读数在仪器回转过程中形成,往往有一个最大回转速度的限制。绝对式基于码盘原理,
经纬仪及角度测量 第一节 角度测量原理 角度测量包括水平角测量和竖直角测量,是测量的三项基本工作之一。角度测量最常用的仪器是经纬仪。水平角测量用于计算点的平面位置,竖直角测量用于测定高差或将倾斜距离改算成水平距离。 一、水平角测量原理 水平角是地面上一点到两目标的方向线投影到水平面上的夹角,也就是过这两方向线所作两竖直面间的二面角。用β表示,角值范围0o~360 o。如图3-1所示,设A 、B 、C 是任意三个位于地面上不同高程的点,B 1A 1、B 1C 1为空间直线BA 、BC 在水平面上的投影,B 1A 1与B 1C 1的夹角β就是为地面上BA 、BC 两方向之间的水平角。 为了测出水平角的大小,可以设想在B 点的上方水平地安置一个带有顺时针刻画、注记的圆盘,并使其圆心O 在过B 点的铅垂线上,有一刻度盘和在刻度盘上读数的指标。观测水平角时,刻度盘中心应安放在过测站点的铅垂线上,直线BA 、BC 在水平圆盘上的投影是om 、on ,此时如果能读出om 、on 在水平圆盘上的读数m 和n ,那么水平角β就等于m 减去n ,即n m -=β。 因此,用于测量水平角的仪器必须有一个能读数的度盘,并能使之水平。为了瞄准不同方向,该度盘应能沿水平方向转动,也能高低俯仰。当度盘高低俯仰时,其视准独应划出一竖直面,这样才能使得在同一竖直面内高低不同的目标有相同的水平度盘读数。 经纬仪就是根据上述要求设计制造的一种测角仪器。 图3-1 水平角测量原理 图3-2 竖直角测量原理 二、竖直角测量原理 竖直角是同一竖直面内视线与水平线间的夹角。角值范围为-90°~+ 90°。视线向上倾斜,竖直角为仰角,符号为正。视线向下倾斜,竖直角为俯角,符号为负。 竖直角与水平角一样,其角值也是度盘上两个方向读数之差。不同的是竖直角的两个方向中必有一个是水平方向。任何类型的经纬仪,制作上都要求当竖直指标水准管气泡居中,望远镜视准轴水平时,其竖盘读数是一个固定值。因此,在观测竖直角时,只要观测目标点一个方向并读取竖盘读数便可算得该目标点的竖直角,而不必观测水平方向。
DJ2光学经纬仪 一、DJ2级光学经纬仪的构造 与DJ6级光学经纬仪相比,DJ2级光学经纬仪的精度较高,在结构上除望远镜的放大倍数较大,照准部水准管的灵敏度较高,度盘格值较小外,主要表现在读数设备的不同。 与J6相比,增加了: 1、测微轮——读数时,对径分划线影像符合。 2、换像手轮——水平读数和竖直读数间的互换。 3、竖直读盘反光镜——竖直读数时反光。 DJ2构造与DJ6基本相同,区别主要在读数设备和读数方法: 采用对径重合读数法——转动测微轮,使上下分划线精确重合后读数。
采用对径分划影像符合的读数方法,实质上是取度盘直径两端读数的平均值,这样可以消除度盘偏心误差的影响。 DJ2级光学经纬仪常用于较高精度的工程测量。如图3-8所示,为国产的DJ2级光学经纬仪的外形,其各部件的名称如图所注。 图3-8 DJ2级光学经纬仪 1-读数显微镜;2-照准部水准管;3-水平制动螺旋;4-轴座连接螺旋;5-望远镜制动螺旋;6-瞄准器; 7-测微轮;8-望远镜微动螺旋;9-换像手轮;10-水平制动螺旋;11-水平度盘位置变换手轮;12-竖盘照明反光镜;13-竖盘指标水准管;14-竖盘指标水准管微动螺旋;15-光学对点器;16-水平度盘照明反光镜 二、DJ2级光学经纬仪的读数方法 近年来生产的DJ2级光学经纬仪,都采用了数字化读数装置。如图3-9所示,右下方为分划重合窗,右上方读数窗中上面的数字为整度数,凸出的小方框中所注数字为整10′数;左下方为测微尺读数窗。 图3-9 DJ2光学经纬仪读数窗 测微尺刻划有600小格,每格为1〞,可估读至0.1〞。测微尺读数窗左边注记数字为分,右边注记为10〞。读数步骤如下: 1.转动测微轮,使分划重合窗中上、下分划线重合,见图3-9(b),并在读数窗中读
全站仪测角精度分析 作者:风流无情*易言*刘清利 让许多测量初学者头痛的并不是测量如何进行,仪器如何操作的问题,其关键在于测角、测边的各种限差如何得知,不同的仪器其2C、上下半测回角之差限值、测回间角值较差限差如何确定的问题。 此文只就仪器精度进行分析。 全站仪精度为2’’是指一测回水平方向中误差不大于2’’。而一测回水平方向是指盘左盘右方向值的平均值,即: 一测回方向=盘左方向值+(盘右方向值±180°) 2 一、半测回归零差限差: 设一测回方向中误差为m =±2’’,则盘左方向中误差=盘右方向 方 中误差=2√2’’由于半测回归零差=盘左方向值-(盘右方向值 ±180°)则半测回归零差方向值中=√2*2√2=4’’.2C限值取中误差 的2倍,即2C=8’’ 二、一测回角值中误差及测回间角值较差的限差: 一测回角值为两个方向值之差,所以,一测回角值中误差为 mβ=m √2=2√2’’,用测回法测量水平角两个测回,两测回间角值较差方 中误差是一测回角值中误差的√倍,即m?=√β=4’’,取两倍中误差为限差,则测回间角值差的容许误差为2m?=8’’ 三、半测回角值的中误差及上下半测回角值之差限差: 一测回的角值是上下半测回角值平均值,故半测回角值中误差为: m =√2mβ=4’’,则上下半测回角值之差限差为半
m?=m 半 √2=4√2’’=5.6’’,取中误差的2倍为容许误差,故容许误差为11.2’’ 四、上边一二三部中对应的函数式如下: 1.一测回方向=盘左方向值+(盘右方向值±180°) 2 2.2C=盘左方向值-(盘右方向值±180°) 3.一测回角值=(一测回方向) 后-(一测回方向) 前 4.测回间角值较差=一测回角值-另一测回角值 5.一测回角值=上半测回角值+下半测回角值 2 6.上下半测回角值较差=上半测回角值-下半测回角值 五、常用函数中误差公式:
第7章经纬仪及水 平角观测
第七章经纬仪及水平角观测 一、选择题 1、光学经纬仪基本结构由 C 。 A.照准部、度盘、辅助部件三大部分构成 B.度盘、辅助部件、基座三大部分构成 C.照准部、度盘、基座三大部分构成 2、测站上经纬仪对中是使经纬仪中心与__ ① C ,整平目的是使经纬仪__② C 。 ①A. 地面点重合 B. 三脚架中孔一致 C.地面点垂线重合。 ②A. 圆水准器气泡居中 B. 基座水平 C.水平度盘水平。 3、经纬仪对中和整平操作的关系是( A )。 A. 互相影响,应反复进行 B. 先对中,后整平,不能反复进行C.相互独立进行,没有影响D.先整平,后对中,不能反复进行 4、经纬仪安置的步骤应是 B 。 A.经纬仪对中、三脚架对中、三脚架整平、精确整平 B.三脚架对中、经纬仪对中、三脚架整平、精确整平 C.三脚架整平、经纬仪对中、三脚架对中、精确整平 5、经纬仪不能直接用于测量( A )。 A.点的坐标 B.水平角 C.垂直角 D.视距 6、水准仪与经纬仪应用脚螺旋的不同是 A 。 A. 经纬仪脚螺旋应用于对中、精确整平,水准仪脚螺旋应用于粗略整平 B. 经纬仪脚螺旋应用于粗略整平、精确整平,水准仪脚螺旋应用于粗略整平 C.经纬仪脚螺旋应用于对中,水准仪脚螺旋应用于粗略整平
7、经纬仪测量水平角时,正倒镜瞄准同一方向所读的水平方向值理论上应相差 ( A )。 A .180° B .0° C .90° D .270° 8、下面测量读数的做法正确的是( C ) A.用经纬仪测水平角,用横丝照准目标读数 B.用水准仪测高差,用竖丝切准水准尺读数 C.水准测量时,每次读数前都要使水准管气泡居中 D.经纬仪测竖直角时,尽量照准目标的底部 9、用经纬仪测水平角和竖直角,一般采用正倒镜方法,下面哪个仪器误差不能 用正倒镜法消除( D ) A . 视准轴不垂直于横轴 B . 盘指标差 C . 横轴不水平 D . 不竖直 10、用经纬仪测竖直角,盘左读数为81o12′18",盘右读数为278o45′54"。则该 仪器的指标差为( B ) A .54" B.-54" C.6" D.-6" 11、下面哪个算式是表示视线倾斜时视距测量所得出的水平距离( C )。 A .KS B.αcos KS C.α2cos KS D.α2sin 2 1KS
导线及导线网按精度等级划分为三、四等和一、二、三级。导线测量主 要技术要求如下表所示: 注:上述表中n表示测站数。 不同精度的全站仪测回数要求如下表所示: 注:上述表中n表示测站数 当测区测图的最大比例尺为1:1000时,一、二、三级导线的平均边 长及总长可适当放长,但最大长度不应大于表中规定长度的2倍。 当导线平均边长较短时,应控制导线边数,但不得超过上述表中相应等级导线长度和平均边长算得的边数;当导线长度小于上述表中规定长度的1/3时,导线全长的绝对闭合差不应大于13cm。 导线网中,结点与结点、结点与高级点之间的导线长度不应大于上述表中相应等级规定长度的
0.7倍。 导线网的布设应符合下列要求: 1导线网用作测区的首级控制时,应布设成环形网或多边形网,宜联测2个已知方向。 2加密网可采用单一附合导线或多结点导线网形式; 3导线宜布设成直伸形状,相邻边长不宜相差过大; 4网内不同线路上的点也不宜相距过近。 控制点点位的选定,应符合下列要求: 1点位应选在质地坚硬、稳固可靠、便于保存的地方,视野应相对开阔,便于加密、扩展和寻找; 2相邻点之间应通视良好,其视线距障碍物的距离,三、四等不宜小于1.5m;四等以下宜保证便于观测,以不受旁折光的影响为原则; 3当采用电磁波测距时,相邻点之间视线应避开烟囱、散热塔、散热池等发热体及强电磁场;4相邻两点之间的视线倾角不宜太大; 5充分利用旧有控制点。
水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相 关规定: (1)照准部旋转轴正确性指标:管水准器气泡或电子水准器长气泡在各位置的读数较差, 1 〃级仪器不应超过2格,2〃级仪器不应超过1格, 6〃级仪器不应超过1.5格; (2)光学经纬仪的测微器行差及隙动差指标:1 〃级仪器不应大于1 〃 2〃级仪器不应大于2〃; (3)水平轴不垂直于垂直轴之差指标:1〃级仪器不应超过10 〃,2〃级仪器不应超过15〃,6〃级仪器不应超过20〃; ⑷补偿器的补偿要求,在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。 (5)垂直微动旋转使用时,视准轴在水平方向上不产生偏移;
第20卷第12期 系 统 仿 真 学 报? V ol. 20 No. 12 2008年6月 Journal of System Simulation Jun., 2008 ? 3127 ? 光电经纬仪动态测角精度仿真测量 贺庚贤,沈湘衡,周兴义 (长春光学精密机械与物理研究所,长春 130033) 摘 要:研制了测量用旋转靶标,靶标即可以提供以一定角速度或角加速度运动的空间仿真目标,又能够记录目标的实时空间位置,以靶标记录的数据为真值,光电经纬仪跟踪目标所测量的数据与真值比较,可得到光电经纬仪的动态测角精度。用Matlab/simulink 建立了靶标仿真图,分析了靶标等速和正弦运动的规律,实现了在规定的角加速度条件下,对光电经纬仪动态测角精度的测量。 关键词:光电经纬仪;动态测角精度;旋转靶标; 仿真目标 中图分类号:TP274+.5 文献标识码:A 文章编号:1004-731X (2008)12-3127-03 Simulation Measurement of Dynamic Angle Precision of Photoelectric Theodolite HE Geng-xian , SHEN Xiang-heng , ZHOU Xing-yi (Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China) Abstract: Rotary target was established, and it was used to test dynamic angle precision of photoelectric theodolite in laboratory. Simulation aim was provided and space-positions of aim were real-time recoded by target. The aim can move as definite angle speed or as max angle acceleration. Data of target was considered as real-value of aim. Test date of photoelectric theodolite was compared with it, and the dynamic angle precision was obtained. Simulation model of the target was built by Matlab/simulink . The law of target’s movement was analyzed by fixed and sine angle speed. Dynamic angle precision of photoelectric theodolite was measured in the condition that angle acceleration met the test requirement. Key words: photoelectric theodolite; dynamic angle precision; rotary target; simulation aim; 引 言 光电经纬仪是采用电视测量技术,具有自动跟踪和实时测量功能的光电测量设备,主要用于飞机、轮船、星体等特种试验场空间目标运动轨迹的测量。动态测角精度是指光电经纬仪在规定的角速度和角加速度运动状态下,实时测量的目标空间指向值与真值之差,是衡量光电经纬仪最重要的技术指标之一。 长期以来,光电经纬仪的动态测角精度一直在外场,通过实测某一飞行目标并与其它高精度设备比对的方法进行验证。由于外场试验受气候、费用、时间等条件的限制,无法经常进行,因此,研究室内测量方法和测量设备是非常必要和急需的。 为了实现对光电经纬仪动态测角精度的测量,必须具有室内仿真目标测量装置,该装置应同时具备两个条件:一是具有室内仿真目标,其运动规律能够代表实际飞行目标的特性;二是在仿真目标运动过程中,其实时空间指向位置准确可知。为此,研制了旋转靶标,旋转靶标即可以产生供光电经纬仪跟踪的仿真目标,又可以测量出目标实时空间指向值,是测量光电经纬仪动态测角精度必不可少的测量设备。 收稿日期:2007-03-09 修回日期:2007-05-18 基金项目:中科院创新基金项目:电视红外跟踪测量系统检测平台( TYCGS05) 作者简介:贺庚贤(1964-), 女, 吉林市人, 学士, 副研究员, 研究方向为动态精密检测; 沈湘衡(1952-), 男, 吉林市人, 博导, 研究方向为光 电测量设备研制、精密检测。 1 旋转靶标 1.1 旋转靶标的组成 图1为旋转靶标结构示意图,主要由支撑架、旋转轴系、平行光管、反射镜、电气控制柜等部分组成。 图1 靶标结构示意图 支撑架的主要作用是稳定支撑旋转目标,为了便于移动,支撑架底部设计有万向移动鼓轮和三点式落地支撑地角。旋转轴系主要由精密转轴、直流伺服电机、导电环和23位绝对式编码器组成,旋转轴的作用是带动平行光管和反射镜转动,产生以一定角速度和角加速度运动的目标,并通过同轴安装的编码器,准确地得到靶标目标的空间角度位置。平行光管的焦距为1m ,口径100mm ,目标形式为星点。平行光管出射的光经反射镜反射后,在空间形成一光锥形目标,提供给光电经纬仪。 电气控制柜中有主控计算机、时统终端、编码器数据采
一、实验目的与要求 1、认识DJ6、DJ2光学经纬仪的基本结构及主要部件的名称和作用。 2、掌握DJ6、DJ2光学经纬仪的基本操作和读数方法。 3、掌握用DJ6、DJ2光学经纬仪按方向观测法(全圆方向观测法)测水角的方法及记录、计算方法,了解各项限差要求及检核。 4、掌握用DJ6光学经纬仪观测垂直角的方法(中丝法)。 二、实验原理与方案 1、人员组织: 第10实验小组由7人组成,每轮实验设置:观测员1人、记录员1人,机动人员5人。 2、仪器设备: DJ6、苏一光DJ2经纬仪各l台、记录板1块、测伞1把、记录手簿1本(附记录板)、木桩1根、水泥钉1枚、2B铅笔2、粉笔1支。 3、实验原理: (1)水平角观测原理如图3-1所示。空间两直线OA和OB相交于点O,将点A、O、B沿铅垂线方向投影到水平面上,得相应投影点A′O′B′,水平线O′A′和O′B′夹角β即是过两方向线所做铅垂面夹角—水平角。经纬仪水平度盘上的读数a和b,则水平角β为两读数之差: β=b-a 图3-1 (2)全圆方向观测法原理如图3-2所示。方向观测法是在一测回内把测站上所有观测方向,先盘左位置依次观测,再盘右位置依次观测,取盘左盘右平均值作为各方向的观测值。如图测站点O周围有待测目标A、B、C,选A作为起始方向。用盘左顺时针旋转照准部,依次照准A、B、C、A,读取观测值,称为上半测回;然后纵转望远镜,改用右盘逆时针旋转照准部,依次照准A、C、B、A并读数,称为下半测回。上、下半测回合起来称为一个测回。
图3-2 (3)垂直角观测原理如图3-3所示。垂直角是在同一铅垂面内某目标方向的视线与水平线的夹角a,其范围为0°~±90°,图中Z A、Z A为A、B方向的天顶距读数。用经纬仪望远镜找准目标A、B,由垂直度盘读数减去水平线在度盘上的度数,即可得到垂直角。 如图3-3 三、实验内容与步骤 (一)安置仪器 1、对中整平(锤球对中) (1)将三脚架调整到合适高度,张开三脚架安置在测站点O上方,在脚架的连接螺旋上挂上锤球,如果锤球尖离标志中心太远,可固定一脚移动另外两脚,或将三脚架整体平移,使锤球尖大致对准测站点标志中心,并注意使架头大致水平,然后将三脚架的脚尖踩入土中。 (2)将经纬仪从箱中取出,用连接螺旋将经纬仪安装在三脚架上。调整脚螺旋,使圆水准器气泡居中。 (3)若锤球尖偏离测站点标志中心,可旋松连接螺旋,在架头上移动经纬仪,使锤球尖精确对中测站点标志中心,然后旋紧连接螺旋。 2、精确整平对中 (1)转动照准部,使水准管平行于任意一对脚螺旋的连线,两手同时向内或向外转动这两个脚螺旋,使气泡居中,注意气泡移动方向始终与左手大拇指移动方向一致; (2)将照准部转动90°,转动第三个脚螺旋,使水准管气泡居中。
作者:赵海波 经纬仪与全站仪简介 【简介】 全站仪,即全站型电子速测仪(Electronic Total Station)。是一种集光、机、电为一体的高技术测量仪器,是集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统。因其一次安置仪器就可完成该测站上全部测量工作,所以称之为全站仪。广泛用于地上大型建筑和地下隧道施工等精密工程测量或变形监测领域。 【原理】 全站仪与光学经纬仪比较电子经纬仪将光学度盘换为光电扫描度盘,将人工光学测微读数代之以自动记录和显示读数,使测角操作简单化,且可避免读数误差的产生。电子经纬仪的自动记录、储存、计算功能,以及数据通讯功能,进一步提高了测量作业的自动化程度。 全站仪与光学经纬仪区别在于度盘读数及显示系统,电子经纬仪的水平度盘和竖直度盘及其读数装置是分别采用两个相同的光栅度盘(或编码盘)和读数传感器进行角度测量的。根据测角精度可分为0.5″,1″,2″,3″,5″,10″等几个等级。 【全站仪的优势】 1、全站仪可以测量高程,尽管测量高程的精度没有水准仪高,但是可以满足一般的高程测量需要,但是经纬仪测量高程就很不方便。 2、全站仪的可视距离更远。 3、全站仪不需钢卷尺配合放线,经纬仪必须和钢卷尺配合才能放线。高级全站仪采用了绝对编码技术、双轴自动补偿系统和免棱镜测量技术,大大提高了测量精度和便利程度。 4、全站仪放线可不受地形起伏限制,甚至可以跨越池塘、河流进行放线设桩,但是经纬仪在放线时必须配合钢卷尺,钢卷尺只能在地势非常平坦的场地才能满足测量精度,并且还要对钢卷尺进行温度、高差方面的尺长改正,很麻烦。 5、经纬仪在钢卷尺的配合下用极坐标原理放线,而全站仪即可极坐标,也可直角坐标系放线。 6、全站仪可以和电脑接驳,利用电脑处理测量数据。 【其他】 经纬仪和全站仪的对中和整平的操作方法完全相同。全站仪显示屏上的N(North),E(East)分别对应于坐标系中的(X,Y),Z则指高程。J2经纬仪的测量中误差为2秒,J6经纬仪的测量中误差为6秒。测量中误差即测量的标准偏差,极限误差为测量中误差的2倍。 《本文完》 作者:赵海波 1