几乎每一种外设都是通过读写设备上的寄存器来进行的。外设寄存器也称为“I/O端口”,通常包括:控制寄存器、状态寄存器和数据寄存器三大类,而且一个外设的寄存器通常被连续地编址。CPU对外设IO端口物理地址的编址方式有两种:一种是I/O映射方式(I/O-mapped),另一种是内存映射方式(Memory-mapped)。而具体采用哪一种则取决于CPU 的体系结构。
有些体系结构的CPU(如,PowerPC、m68k等)通常只实现一个物理地址空间(RAM)。在这种情况下,外设I/O端口的物理地址就被映射到CPU的单一物理地址空间中,而成为内存的一部分。此时,CPU可以象访问一个内存单元那样访问外设I/O端口,而不需要设立专门的外设I/O指令。这就是所谓的“内存映射方式”(Memory-mapped)。
而另外一些体系结构CPU(典型地如X86)则为外设专门实现了一个单独地地址空间,称为“I/O地址空间”或者“I/O端口空间”。这是一个与CPU地RAM物理地址空间不同的地址空间,所有外设的I/O端口均在这一空间中进行编址。CPU通过设立专门的I/O指令(如X86的IN和OUT指令)来访问这一空间中的地址单元(也即I/O端口)。这就是所谓的“I/O 映射方式”(I/O-mapped)。与RAM物理地址空间相比,I/O地址空间通常都比较小,如x86 CPU的I/O空间就只有64KB(0-0xffff)。这是“I/O映射方式”的一个主要缺点。
Linux将基于I/O映射方式的或内存映射方式的I/O端口通称为“I/O区域”(I/O region)。在讨论对I/O区域的管理之前,我们首先来分析一下Linux是如何实现“I/O资源”这一抽象概念的.
在驱动程序编写过程中,很少会注意到IO Port和IO Mem的区别。虽然使用一些不符合规范的代码可以达到最终目的,这是极其不推荐使用的。
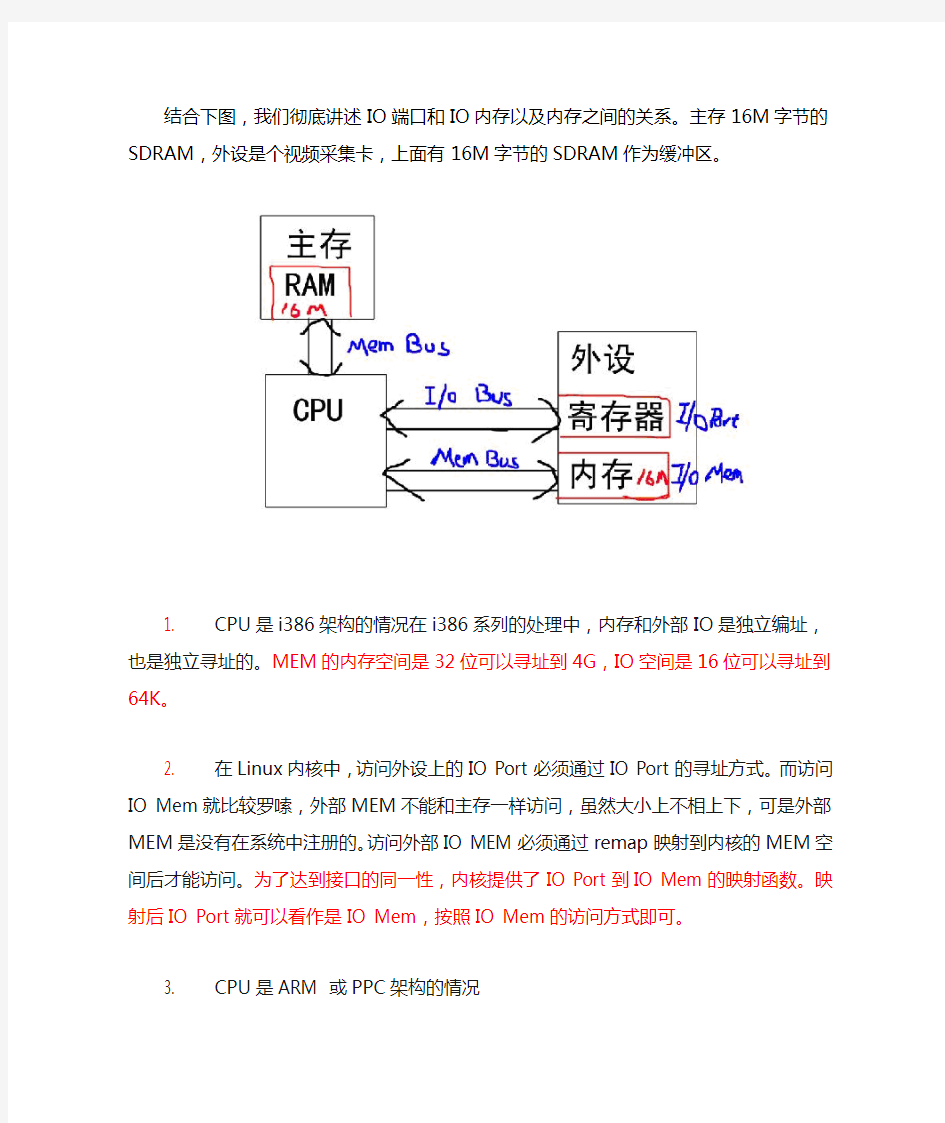
结合下图,我们彻底讲述IO端口和IO内存以及内存之间的关系。主存16M字节的SDRAM,外设是个视频采集卡,上面有16M字节的SDRAM作为缓冲区。
1.CPU是i386架构的情况在i386系列的处理中,内存和外部IO是独立编址,
也是独立寻址的。MEM的内存空间是32位可以寻址到4G,IO空间是16位可以寻址到64K。
2.在Linux内核中,访问外设上的IO Port必须通过IO Port的寻址方式。而访
问IO Mem就比较罗嗦,外部MEM不能和主存一样访问,虽然大小上不相上下,可是外部MEM是没有在系统中注册的。访问外部IO MEM必须通过remap映射到内核的MEM空间后才能访问。为了达到接口的同一性,内核提供了IO Port到IO Mem的映射函数。映射后IO Port就可以看作是IO Mem,按照IO Mem的访问方式即可。
3.CPU是ARM 或PPC架构的情况
在这一类的嵌入式处理器中,IO Port的寻址方式是采用内存映射,也就是IO bus就是Mem bus。系统的寻址能力如果是32位,IO Port+Mem(包括IO Mem)可以达到4G。
访问这类IO Port时,我们也可以用IO Port专用寻址方式。至于在对IO Port 寻址时,内核是具体如何完成的,这个在内核移植时就已经完成。在这种架构的处理器中,仍然保持对IO Port的支持,完全是i386架构遗留下来的问题,在此不多讨论。而访问IO Mem的方式和i386一致。
注意:linux内核给我提供了完全对IO Port和IO Mem的支持,然而具体去看看driver目录下的驱动程序,很少按照这个规范去组织IO Port和IO Mem资源。对这二者访问最关键问题就是地址的定位,在C语言中,使用volatile 就可以实现。很多的代码访问IO Port中的寄存器时,就使用volatile关键字,虽然功能可以实现,我们还是不推荐使用。就像最简单的延时莫过于while,可是在多任务的系统中是坚决避免的!
RISC指令系统的CPU(如ARM、PowerPC等)通常只实现一个物理地址空间,外设I/O端口成为内存的一部分。此时,CPU可以象访问一个内存单元那样访问外设I/O端口,而不需要设立专门的外设I/O指令。
但是,这两者在硬件实现上的差异对于软件来说是完全透明的,驱动程序开发人员可以将内存映射方式的I/O端口和外设内存统一看作是"I/O内存"资源。
一般来说,在系统运行时,外设的I/O内存资源的物理地址是已知的,由硬件的设计决定。但是CPU通常并没有为这些已知的外设I/O内存资源的物理地址预定义虚拟地址范围,驱动程序并不能直接通过物理地址访问I/O内存资源,而必须将它们映射到核心虚地址空间内(通过页表),然后才能根据映射所得到的核心虚地址范围,通过访内指令访问这些I/O内存资源。Linux在io.h头文件中声明了函数ioremap(),用来将I/O内存资源的物理地址映射到核心虚地址空间(3GB-4GB)中,原型如下:
void * ioremap(unsigned long phys_addr, unsigned long size, unsigned long flags);
iounmap函数用于取消ioremap()所做的映射,原型如下:
void iounmap(void * addr);
这两个函数都是实现在mm/ioremap.c文件中。
在将I/O内存资源的物理地址映射成核心虚地址后,理论上讲我们就可以象读写RAM那样直接读写I/O内存资源了。为了保证驱动程序的跨平台的可移植性,我们应该使用Linux中特定的函数来访问I/O内存资源,而不应该通过指向核心虚地址的指针来访问。如在x86平台上,读写I/O的函数如下所示:
#define readb(addr) (*(volatile unsigned char *) __io_virt(addr))
#define readw(addr) (*(volatile unsigned short *) __io_virt(addr))
#define readl(addr) (*(volatile unsigned int *) __io_virt(addr))
#define writeb(b,addr) (*(volatile unsigned char *) __io_virt(addr) = (b))
#define writew(b,addr) (*(volatile unsigned short *) __io_virt(addr) = (b))
#define writel(b,addr) (*(volatile unsigned int *) __io_virt(addr) = (b))
#define memset_io(a,b,c) memset(__io_virt(a),(b),(c))
#define memcpy_fromio(a,b,c) memcpy((a),__io_virt(b),(c))
#define memcpy_toio(a,b,c) memcpy(__io_virt(a),(b),(c))
最后,我们要特别强调驱动程序中mmap函数的实现方法。用mmap映射一个设备,意味着使用户空间的一段地址关联到设备内存上,这使得只要程序在分配的地址范围内进行读取或者写入,实际上就是对设备的访问。
笔者在Linux源代码中进行包含"ioremap"文本的搜索,发现真正出现的ioremap 的地方相当少。所以笔者追根索源地寻找I/O操作的物理地址转换到虚拟地址的真实所在,发现Linux有替代ioremap的语句,但是这个转换过程却是不可或缺的。
CPU对外设端口物理地址的编址方式有两种:
一种是IO映射方式,另一种是内存映射方式。
Linux将基于IO映射方式的和内存映射方式的IO端口统称为IO区域(IO region)。
IO region仍然是一种IO资源,因此它仍然可以用resource结构类型来描述。
Linux管理IO region:
1) request_region()
把一个给定区间的IO端口分配给一个IO设备。
2) check_region()
检查一个给定区间的IO端口是否空闲,或者其中一些是否已经分配给某个IO设备。
3) release_region()
释放以前分配给一个IO设备的给定区间的IO端口。
Linux中可以通过以下辅助函数来访问IO端口:
inb(),inw(),inl(),outb(),outw(),outl()
“b”“w”“l”分别代表8位,16位,32位。
对IO内存资源的访问
1) request_mem_region()
请求分配指定的IO内存资源。
2) check_mem_region()
检查指定的IO内存资源是否已被占用。
3) release_mem_region()
释放指定的IO内存资源。
其中传给函数的start address参数是内存区的物理地址(以上函数参数表已省略)。
驱动开发人员可以将内存映射方式的IO端口和外设内存统一看作是IO内存资源。
ioremap()用来将IO资源的物理地址映射到内核虚地址空间(3GB - 4GB)中,参数addr是指向内核虚地址的指针。
Linux中可以通过以下辅助函数来访问IO内存资源:
readb(),readw(),readl(),writeb(),writew(),writel()。
Linux在kernel/resource.c文件中定义了全局变量ioport_resource和
iomem_resource,来分别描述基于IO映射方式的整个IO端口空间和基于内存映射方式的IO内存资源空间(包括IO端口和外设内存)。
内存映射(IO地址和内存地址)
ARM体系结构下面内存和i/o映射区别
(1)关于IO与内存空间:
在X86处理器中存在着I/O空间的概念,I/O空间是相对于内存空间而言的,它通过特定的指令in、out来访问。端口号标识了外设的寄存器地址。Intel语法的in、out指令格式为:
IN 累加器, {端口号│DX}
OUT {端口号│DX},累加器
目前,大多数嵌入式微控制器如ARM、PowerPC等中并不提供I/O空间,而仅存在内存空间。内存空间可以直接通过地址、指针来访问,程序和程序运行中使用的变量和其他数据都存在于内存空间中。
即便是在X86处理器中,虽然提供了I/O空间,如果由我们自己设计电路板,外设仍然可以只挂接在内存空间。此时,CPU可以像访问一个内存单元那样访问外设I/O端口,而不需要设立专门的I/O指令。因此,内存空间是必须的,而I/O空间是可选的。
(2)inb和outb:
在Linux设备驱动中,宜使用Linux内核提供的函数来访问定位于I/O空间的端口,这些函数包括:
·读写字节端口(8位宽)
unsigned inb(unsigned port);
void outb(unsigned char byte, unsigned port);
·读写字端口(16位宽)
unsigned inw(unsigned port);
void outw(unsigned short word, unsigned port);
·读写长字端口(32位宽)
unsigned inl(unsigned port);
void outl(unsigned longword, unsigned port);
·读写一串字节
void insb(unsigned port, void *addr, unsigned long count);
void outsb(unsigned port, void *addr, unsigned long count);
·insb()从端口port开始读count个字节端口,并将读取结果写入addr指向的内存;outsb()将addr指向的内存的count个字节连续地写入port开始的端口。·读写一串字
void insw(unsigned port, void *addr, unsigned long count);
void outsw(unsigned port, void *addr, unsigned long count);
·读写一串长字
void insl(unsigned port, void *addr, unsigned long count);
void outsl(unsigned port, void *addr, unsigned long count);
上述各函数中I/O端口号port的类型高度依赖于具体的硬件平台,因此,只是写出了unsigned。
(3)readb和writeb:
在设备的物理地址被映射到虚拟地址之后,尽管可以直接通过指针访问这些地址,但是工程师宜使用Linux内核的如下一组函数来完成设备内存映射的虚拟地址的读写,这些函数包括:
·读I/O内存
unsigned int ioread8(void *addr);
unsigned int ioread16(void *addr);
unsigned int ioread32(void *addr);
与上述函数对应的较早版本的函数为(这些函数在Linux 2.6中仍然被支持):unsigned readb(address);
unsigned readw(address);
unsigned readl(address);
·写I/O内存
void iowrite8(u8 value, void *addr);
void iowrite16(u16 value, void *addr);
void iowrite32(u32 value, void *addr);
与上述函数对应的较早版本的函数为(这些函数在Linux 2.6中仍然被支持):void writeb(unsigned value, address);
void writew(unsigned value, address);
void writel(unsigned value, address);
(4)把I/O端口映射到“内存空间”:
void *ioport_map(unsigned long port, unsigned int count);
通过这个函数,可以把port开始的count个连续的I/O端口重映射为一段“内存空间”。然后就可以在其返回的地址上像访问I/O内存一样访问这些I/O端口。当不再需要这种映射时,需要调用下面的函数来撤消:
void ioport_unmap(void *addr);
实际上,分析ioport_map()的源代码可发现,所谓的映射到内存空间行为实际上是给开发人员制造的一个“假象”,并没有映射到内核虚拟地址,仅仅是为了让工程师可使用统一的I/O内存访问接口访问I/O端口。
11.2.7 I/O 空间的映射
很多硬件设备都有自己的内存,通常称之为I/O空间。例如,所有比较新的图形卡都有几MB的RAM,称为显存,用它来存放要在屏幕上显示的屏幕影像。1.地址映射
根据设备和总线类型的不同,PC体系结构中的I/O空间可以在三个不同的物理地址范围之间进行映射:
(1)对于连接到ISA总线上的大多数设备
I/O空间通常被映射到从0xa0000到0xfffff的物理地址范围,这就在640K和1MB 之间留出了一段空间,这就是所谓的“洞”。
(2)对于使用VESA本地总线(VLB)的一些老设备
这是主要由图形卡使用的一条专用总线:I/O空间被映射到从0xe00000到0xffffff的地址范围中,也就是14MB到16MB之间。因为这些设备使页表的初始化更加复杂,因此已经不生产这种设备。
(3)对于连接到PCI总线的设备
I/O空间被映射到很大的物理地址区间,位于RAM物理地址的顶端。这种设备的处理比较简单。
2.访问I/O空间
内核如何访问一个I/O空间单元?让我们从PC体系结构开始入手,这个问题很容易就可以解决,之后我们再进一步讨论其他体系结构。
不要忘了内核程序作用于虚拟地址,因此I/O空间单元必须表示成大于PAGE_OFFSET的地址。在后面的讨论中,我们假设PAGE_OFFSET等于
0xc0000000,也就是说,内核虚拟地址是在第4G。
内核驱动程序必须把I/O空间单元的物理地址转换成内核空间的虚拟地址。在PC体系结构中,这可以简单地把32位的物理地址和0xc0000000常量进行或运算得到。例如,假设内核需要把物理地址为0x000b0fe4的I/O单元的值存放在t1中,把物理地址为0xfc000000的I/O单元的值存放在t2中,就可以使用下面的表达式来完成这项功能:
t1 = *((unsigned char *)(0x c00b0fe4));
t2 = *((unsigned char *)(0xfc000000));
在第六章我们已经介绍过,在初始化阶段,内核已经把可用的RAM物理地址映射到虚拟地址空间第4G的最初部分。因此,分页机制把出现在第一个语句中的虚拟地址0xc00b0fe4映射回到原来的I/O物理地址0x000b0fe4,这正好落在从640K到1MB的这段“ISA洞”中。这正是我们所期望的。
但是,对于第二个语句来说,这里有一个问题,因为其I/O物理地址超过了系统RAM的最大物理地址。因此,虚拟地址0xfc000000就不需要与物理地址
0xfc000000相对应。在这种情况下,为了在内核页表中包括对这个I/O物理地址进行映射的虚拟地址,必须对页表进行修改:这可以通过调用ioremap( )函数来实现。ioremap( )和vmalloc( )函数类似,都调用get_vm_area( ) 建立一个新的vm_struct描述符,其描述的虚拟地址区间为所请求I/O空间区的大小。然后,ioremap( )函数适当地更新所有进程的对应页表项。
因此,第二个语句的正确形式应该为:
io_mem = ioremap(0xfb000000, 0x200000);
t2 = *((unsigned char *)(io_mem + 0x100000));
第一条语句建立一个2MB的虚拟地址区间,从0xfb000000开始;第二条语句读取地址0xfc000000的内存单元。驱动程序以后要取消这种映射,就必须使用iounmap( )函数。
现在让我们考虑一下除PC之外的体系结构。在这种情况下,把I/O物理地址加上0xc0000000常量所得到的相应虚拟地址并不总是正确的。为了提高内核的可移植性,Linux特意包含了下面这些宏来访问I/O空间:
readb, readw, readl
分别从一个I/O空间单元读取1、2或者4个字节
writeb, writew, writel
分别向一个I/O空间单元写入1、2或者4个字节
memcpy_fromio, memcpy_toio
把一个数据块从一个I/O空间单元拷贝到动态内存中,另一个函数正好相反,把一个数据块从动态内存中拷贝到一个I/O空间单元
memset_io
用一个固定的值填充一个I/O空间区域
对于0xfc000000 I/O单元的访问推荐使用这样的方法:
io_mem = ioremap(0xfb000000, 0x200000);
t2 = readb(io_mem + 0x100000);
使用这些宏,就可以隐藏不同平台访问I/O空间所用方法的差异。
从本质上来说是一样的,IO端口在Linux驱动中是指IO端口的寄存器,通过操作寄存器来控制IO端口。而IO内存是指一些设备把IO寄存器映射到某个内存区域,因为访问内存就不要特殊的指令。
注意:1、使用用户自定义设备里的路由器 2、两个路由器之间的连线使用,连接的两端口为s0/0/0和s0/0/0 1、Router0端口的配置: Continue with configuration dialog? [yes/no]: no Router>en Router#conf t Router(config)#int f0/0 Router(config-if)#ip add 192.168.1.254 255.255.255.0 Router(config-if)#no shut Router(config-if)#exit
Router(config)#int s 0/0/0 Router(config-if)#ip add 192.168.0.1 255.255.255.0 Router(config-if)#no shut Router(config-if)#clock rate 64000 Router(config-if)#no shut Router(config-if)#end Router#show ip int b 2、Router1的端口配置: Continue with configuration dialog? [yes/no]: no Router>en Router#conf t Router(config)#int f0/0 Router(config-if)#ip add 192.168.2.254 255.255.255.0 Router(config-if)#no shut
Router(config-if)#exit Router(config)#int s 0/0/0 Router(config-if)#ip add 192.168.0.2 255.255.255.0 Router(config-if)#no shut Router(config-if)#end Router#show ip int b 3、Router0的静态路由配置: Router#conf t Router(config)#ip route 192.168.2.0 255.255.255.0 192.168.0.2 Router(config)#end Router#show ip route
串行接口简介 串行接口(Serial port)简称串口,是计算机在与外围设备或者其他计算机连接进行数据传送时的一种常用接口方式。 串口通信的特点在于数据和控制信息室一位接一位地传送出去的,若出错则重新发送该位数据,由于每次只发送一位数据,其传输速度较慢,但因为干扰少,所以更适用于长距离传送。 串口已成为大多数计算机的标准配置之一,在许多普通计算机的接口中都能找到。用户只需增加一根连接线即可进行串口通信,不需要增添其他额外设备,所以在工业控制盒通信中得到了广泛的应用,但是一个串口只能与一个设备进行连接和通信,对于某些应用需求这是一个限制。 协议: 串口有多种通信标准和接口形式,如RS-232、RS-422、RS485等,各种形式接口的管脚数量和定义也不尽相同。其中最常用的修订版本是RS-232C。RS-232C标准(协议)的全称是EIA-RS-232C标准,定义是“数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准”。RS-232C是一个已制定很久的标准(RS表示推荐标准;232表示标识符;C表示修改次数),它描述了计算机及相关设备间较低速率的串行数据通信的物理接口及协议。 硬件: EIA RS-232C标准串口常用于连接计算机、打印机和调制解调器等设备。在许多PC机的主板接口上都能找到他们的身影,这是一种D形接口,分别为25针和9针两种形式,如下图所示。 9针串口的9条连接线中包括2条数据线(TD和RD)、5条握手线(RTS、CTS、DSR、CD)、1条信号地线(SG)和1条振铃指示线(RI),这些引线足以包含大多数RS-232接口中使用的核心引线。25针串口是标准的RS-232接口,其引线除了包括RS-232的核心引线集外,还可覆盖标准中规定的所有信号。
串行端口程序设计 一、实验目的 了解在linux环境下串行程序设计的基本方法。 掌握终端的主要属性及设置方法,熟悉终端I /O函数的使用。 学习使用多线程来完成串口的收发处理。 二、实验内容 读懂程序源代码,学习终端I /O函数的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。 三、预备知识 有C语言基础。 掌握在Linux下常用编辑器的使用。 掌握Makefile 的编写和使用。 掌握Linux下的程序编译与交叉编译过程 四、实验设备及工具 硬件:UP-CUP S2410 经典平台、PC机Pentium 500以上, 硬盘10G以上。 软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境 五、实验原理 异步串行I /O方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。数据的各不同位可以分时使用同一传输通道,因此串行I/O可以减少信号连线,最少用一对线即可进行。接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。
为了恢复发送的信息,双方必须协调工作。在微型计算机中大量使用异步串行I/O方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。 图2.3.1串行通信字符格式 图2.3.1给出异步串行通信中一个字符的传送格式。开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5位或2位的时间宽度。至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特率为50,95,110,150,300,600,1200,2400,4800,9600等。 接收方按约定的格式接收数据,并进行检查,可以查出以下三种错误: ●奇偶错:在约定奇偶检查的情况下,接收到的字符奇偶状态和约定不符。 ●帧格式错:一个字符从起始位到停止位的总位数不对。 ●溢出错:若先接收的字符尚未被微机读取,后面的字符又传送过来,则产生溢出错。 每一种错误都会给出相应的出错信息,提示用户处理。一般串口调试都使用空的MODEM 连接电缆,其连接方式如下:
第九课A Tmega16(L)的IO端口 本教程节选自周兴华老师《手把手教你学A VR单片机C程序设计》教程,如需转载,请注明出处!读者可通过当当网、淘宝网等网站购买本教程,如需购买配书实验器材,可登陆周兴华单片机培训中心网购部自助购买! ATmega16(L)单片机有32个通用I/O口,分为PA、PB、PC和PD四组,每组都是8位。这些I/O 口都可以通过各自的端口寄存器设置成输入和输出(即作为普通端口使用),有些I/O口还具有第二功能(我们在后面使用到这些第二功能时再介绍)。 ATmega16(L)单片机的I/O口在不考虑第二功能时,其基本输入输出功能都是相同的。如图7-1所示为ATmega16(L)单片机I/O口的结构图。每个端口对应3个寄存器,即方向寄存器DDRX(X=A、B、C、D)、端口寄存器PORTX(X=A、B、C、D)、输入引脚PINX(X=A、B、C、D),各个端口的工作状况都可以通过对DDRX、PORTX和PINX的操作来完成。所有的A VR单片机的I/O端口都具有读、写和修改功能。表7-1列出了A Tmega16(L)的I/O端口的组合控制设置。 ATmega16(L)单片机每一组I/O口的所有管脚都可以单独选择上拉电阻。引脚缓冲器可以吸收20mA 的电流,能够直接驱动LED显示。如果设置了弱上拉电阻,当管脚被拉低时,引脚会输出电流。1.DDRX DDRX为端口方向寄存器。当DDRX的某一位置1时相应引脚作为输出使用。反之,当DDRX的某一位置0时,对应的引脚单片机培训作为输入使用。 例如: DDRB=0xF0;//此语句将PB端口的PB0~PB3位设为输入,而PB4~PB7位设为输出。2.PORTX PORTX为端口数据寄存器。 如果引脚设为输出,则对PORTX进行写操作即改变引脚的输出值。
单片机I/O口定义 I/O端口又称为I/O接口,也叫做I/O通道或I/O通道。I/O端口是MCS-51单片机对外部实现控制和信息交换的必经之路,是一个过渡的集成电路,用于信息传送过程中的速度匹配和增强它的负载能力。I/O端口右串行和并行之分,串行I/O端口一次只能传送一位二进制信息,并行I/O端口一次可以传送一组(8位)二进制信息。 并行I/O端口 8051有四个并行I/O端口,分别命名为P0、P1、P2和P3,在这四个并行I/O端口中,每个端口都有双向I/O功能。即CPU即可以从四个并行I/O端口中的任何一个输出数据,又可以从它们那里输入数据。每个I/O端口内部都有一个8位数据输出锁存器和一个8位数据输入缓冲器,四个数据输出锁存器和端口号P0、P1、P2和P3同名,皆为特殊功能寄存器SFR中的一个。因此,CPU数据从并行I/O端口输出时可以得到锁存,数据输入时可以得到缓冲。 四个并行I/O端口在结构上并不相同,因此它们在功能和用途上的差异较大。P0口和P2口内部均有一个受控制器控制的二选一选择电路,故它们除可以用作通用I/O口外,还具有特殊的功能。例如:P0可以输出片外存储器的低八位地址码和读写数据,P2口可以输出片外存储器的高八位地址码,等等。P1口常作为通用I/O口使用,为CPU传送用户数据;P3口除可以作为通用I/O口使用外,还具有第二功能。在四个并行I/O端口中,只有P0口是真正的双向I/O口,故它具有较大的负载能力,最多可以推动8个LSTTL门,其余3个
I/O口是准双向I/O口,只能推动4个LSTTL门。 四个并行I/O端口作为通用I/O使用时,共有写端口、读端口和读引脚三种操作方式,写端口实际上是输出数据,是把累加器A或其他寄存器中的数据传送到端口锁存器中,然后由端口自动从端口引脚线上输出。读端口不是真正的从外部输入数据,而是把端口锁存器中的输出数据读到CPU的累加器A中。读引脚才是真正的输入外部数据的操作,是从端口引脚线上读入外部的输入数据。端口的上述三种操作书架上是通过指令或程序来实现的。 串行I/O端口 8051有一个全双工的可编程串行I/O端口。这个串行I/O端口既可以在程序控制下把CPU中的8位并行数据编程串行数据逐行从发送数据线TXD发送出去,也可以把RXD线上串行接收到的数据变成8位并行数据送给CPU,而且这种串行发送和串行接收可以单独进行,也可以同时进行。 8051串行发送和串行接收利用了P3口的第二功能,即它利用P3.1引脚作为串行数据的发送线TDX和P3.0引脚作为串行数据的接收线RXD,串行口I/O口的电路结构还包括串行口控制寄存器SCON,电源及波特率选择寄存器PCON和串行数据缓冲器SBUF等,它们都属于SFR(特殊功能寄存器)。其中,PCON和SCON用于设置串行口工作方式和确定数据的发送和接收波特率,SBUF实际上有两个8位寄存器组成,一个工作方式和确定数据的发送和接收比特率,另一个用于存放接收到的数据,起着数据的缓冲作用。
2.3 串行端口程序设计 一、实验目的 ?了解在l inux 环境下串行程序设计的基本方法。 ?掌握终端的主要属性及设置方法,熟悉终端I /O 函数的使用。 ?学习使用多线程来完成串口的收发处理。 二、实验内容 读懂程序源代码,学习终端I/O 函数的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。 三、预备知识 ?有C语言基础。 ?掌握在L inux 下常用编辑器的使用。 ?掌握M akefile 的编写和使用。 ?掌握L inux 下的程序编译与交叉编译过程 四、实验设备及工具 硬件:UP-TECH S2410/P270 DVP 嵌入式实验平台、PC 机P entium 500 以上, 硬盘10G 以上。软件:PC 机操作系统R EDHAT LINUX 9.0+MINICOM+ARM-LINUX 开发环境
五、实验原理 异步串行I/O 方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。数据的各不同位可以分时使用同一传输通道,因此串行I/O 可以减少信号连线,最少用一对线即可进行。接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。为了恢复发送的信息,双方必须协调工作。在微型计算机中大量使用异步串行I/O 方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。 图2.3.1 串行通信字符格式 图2.3.1 给出异步串行通信中一个字符的传送格式。开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。每个字符的数据位长可以约定为5位、6 位、7 位或8位,一般采用A SCII 编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5 位或2位的时间宽度。至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特率为50,95, 110,150,300,600,1200,2400,4800,9600 等。接收方按约定的格 式接收数据,并进行检查,可以查出以下三种错误: z奇偶错:在约定奇偶检查的情况下,接收到的字符奇偶状态和约定不符。 z帧格式错:一个字符从起始位到停止位的总位数不对。 z溢出错:若先接收的字符尚未被微机读取,后面的字符又传送过来,则产生溢出错。每一种错误都会给出相应的出错信息,提示用户处理。一般串口调试都使用空的
IO端口复用 简介 I/O多路复用(multiplexing):本质是通过一种机制(系统内核缓冲I/O数据),让单个进程可以监视多个文件描述符,一旦某个描述符就绪(一般是读就绪或写就绪),能够通知程序进行相应的读写操作。 适用场景:高并发的服务器端。应对并发,常见的思维是创建多线程,每个线程管理一个并发操作,但是弊端很明显,就是多线程需要上下文切换,这个切换的消耗太大,当连接的客户端很多的时候弊端就很突出了。所示使用单线程的多路复用。 几种方式 1.s elect Linux提供的select相关函数接口如下: #include
件中删除 */ FD_CLR(int fd, fd_set* fds) /* 判断指定描述符是否 在集合中 */ 接口解释: 1:select函数的返回值就绪描述符的数目,超时时返回0,出错返回-1。 2:第一个参数max_fd指待测试的fd个数,它的值是待测试的最大文件描述符 加1,文件描述符从0开始到max_fd-1都将被测试。 3:中间三个参数readset、writeset和exceptset指定要让内核测试读、写和异 常条件的fd集合,如果不需要测试的可以设置为NULL。 代码演示: sockfd=socket(AF_INET,SOCK_STREAM,0); memset(&addr,0,sizeof(addr)); addr.sin_family=AF_INET; addr.sin_port=htons(2000); addr.sin_addr.s_addr=IN ADDR_ANY; bind(sockfd,(struct sockaddr*)&addr,sizeof(addr)); listen(sockfd,5); fd_set rset; int max = 0; int fds[5]; for(int i=0;i<5;i++) { memset(&client,O,sizeof(client); addrlen=sizeof(client); fds[i]=accept(sockfd,(struct sockaddr*) &client,&addrlen); if(fds[i]>max) max=fds[i]; } while(1)
I/O端口基本知识 (2010-03-06 09:20:50) 转载 1.什么是I/O端口? CPU使用什么指令与外设进行数据交换? 答:CPU与I/O设备通过硬件接口或控制器相连接,这些接口或控制器都有数量不等的端口,这些端口有统一的地址编码,CPU通过这些端口使用输入输出指令IN、OUT与外设进行数据交换。 2.CPU为什么不能用MOV指令进行I/O数据传输? 答:在80x86微机系统中,I/O端口编址在一个独立的地址空间中,它和存储器是完全分离的。因此,对于存储器的存取操作使用MOV指令,而与端口进行信息交换的操作使用专门的I/O指令,二者不能混淆。 3.使用查询方式进行输入输出的优缺点是什么? 答:使用查询方式编程可直接在端口级上输入输出信息,数据的传送速度和吞吐量比较高,另外在控制多个设备的I/O时,可在程序中安排它们的优先级,最先查询的设备,其工作的优先级也最高。修改程序中的查询次序,实际上也就修改了设备的优先级,这样以最简便的方法实现了对设备优先级的控制。查询方式的缺点主要是在查询过程中,要反复的查询等待,浪费了CPU原本可执行大量指令的时间,而且由询问转向相应的处理程序的时间较长,尤其在设备比较多的情况下。 4.什么是中断? 答:计算机在执行程序过程中,遇到需要处理的事件时,暂停当前正在运行的程序,转去执行有关的服务程序,处理完后自动返回原程序,这个过程称为中断(interrupt)。中断在现代计算机系统中是一种非常重要的技术,输入输出设备和主机交换数据、分时操作、实时系统、多处理机系统、计算机网络和分布式计算机系统都要用到这种技术。 5.中断分为几类? 答:中断可分为内中断和外中断。内中断是由计算机内部原因引起的中断,内中断又称为软中断,它通常由三种情况引起: (1) 由中断指令INT引起;
NOTE1-PIC24FJ32GA004系列的IO端口使用简介介绍针对PIC24FJ32GA004或相同系列单片机IO端口使用。 1、IO寄存器 TRISx:方向寄存器 PORTx:端口寄存器 LATx:锁存寄存器 ODCx:漏极输出控制寄存器 2、寄存器使用 TRISx:控制端口输入输出属性。其中某位为1,引脚输入(input);为0,引脚输出(output)。 PORTx:读PORTX,是直接读引脚上的电平状态(见图)。 写PORTX,将数值写入引脚数据锁存器(见图)。 PIC单片机引脚操作模式为“读出--修改--写入”,使用PORTX操作引脚时应注意两点,一是在单片机初始化之后的运行中尽量不改变端口输入输出方向,容易出问题,二是IO端口避免链接容性负载,此种在高速操作IO端口时会出问题,比如输出快速变化的高低电平时,每次输出都会读取一次端口寄存器数值。 LATx:读LATX,得到保存在端口数据锁存器中的值(该值为写LATX或PORTX后所得)。 写LATx,讲数值写入引脚数据锁存器,与写PORTX效果相同。 通过LATX操作端口IO,可避免上述因“读出--修改--写入”模式造成的问题。 ODCx:将引脚的相应位置1可配置引脚为漏极开路输出。
3、IO端口使用原则 (1)端口用作出入,需要直接读取外部引脚上的电平状态,使用PORTX寄存器:int V ALUE=PORTA; (2)端口用作输出,输出高低电平,驱动芯片等使用LATX寄存器: LATA=0XFFEE; 4、IO端口使用的位操作 可以使用P24FJ32GA004.h中定义的位操作宏定义对单片机的IO端口以及其他众多单片机寄存器进行位操作。 如:_LATB0=1; RB0输出高电平 以端口B为例,针对PIC24F系列的位操作被定义如下形式: /* TRISB */ #define _TRISB0 TRISBbits.TRISB0 #define _TRISB1 TRISBbits.TRISB1 …… #define _TRISB15 TRISBbits.TRISB15 /* PORTB */ #define _RB0 PORTBbits.RB0 #define _RB1 PORTBbits.RB1 …… #define _RB15 PORTBbits.RB15 /* LATB */ #define _LATB0 https://www.doczj.com/doc/a27007825.html,TB0 #define _LATB1 https://www.doczj.com/doc/a27007825.html,TB1 …… #define _LATB15 https://www.doczj.com/doc/a27007825.html,TB15 /* ODCB */ #define _ODB0 ODCBbits.ODB0
RS-485串行接口标准 1、平衡传输 RS-485数据信号采用差分传输方式,也称作平衡传输,它使用一对双绞线,将其中一线定义为A,另一线定义为B,通常情况下,发送驱动器A、B之间的正电平在+2~+6V,是一个逻辑状态,负电平在-2~6V,是另一个逻辑状态。另有一个信号地C,在RS-485中还有一“使能”端,而在RS-422中这是可用可不用的。“使能”端是用于控制发送驱动器与传输线的切断与连接。当“使能”端起作用时,发送驱动器处于高阻状态,称作“第三态”,即它是有别于逻辑“1”与“0”的第三态。 接收器也作与发送端相对的规定,收、发端通过平衡双绞线将AA与BB对应相连,当在收端AB之间有大于+200mV的电平时,输出正逻辑电平,小于-200mV时,输出负逻辑电平。接收器接收平衡线上的电平范围通常在200mV至6V之间。 2、RS-485电气规定 由于RS-485是从RS-422基础上发展而来的,所以RS-485许多电气规定与RS-422相仿。如都采用平衡传输方式、都需要在传输线上接终接电阻等。RS-485可以采用二线与四线方式,二线制可实现真正的多点双向通信,而采用四线连接时,与RS-422一样只能实现点对多的通信,即只能有一个主(Master)设备,其余为从设备,但它比RS-422有改进,无论四线还是二线连接方式总线上可多接到32个设备。 RS-485与RS-422的不同还在于其共模输出电压是不同的,RS-485是-7V至+12V之间,而RS-422在-7V至+7V之间,RS-485接收器最小输入阻抗为12k剑 鳵S-422是4k健; 旧峡梢运礡S-485满足所有RS-422的规范,所以RS-485的驱动器可以用在RS-422网络中应用。 RS-485与RS-422一样,其最大传输距离约为1219米,最大传输速率为10Mb/s。平衡双绞线的长度与传输速率成反比,在100kb/s速率以下,才可能使用规定最长的电缆长度。只有在很短的距离下才能获得最高速率传输。一般100米长双绞线最大传输速率仅为1Mb/s RS-485需要2个终接电阻,其阻值要求等于传输电缆的特性阻抗。在矩距离传输时可不需终接电阻,即一般在300米以下不需终接电阻。终接电阻接在传输总线的两端。 在MCU之间中长距离通信的诸多方案中、RS-485因硬件设计简单、控制方便、成本低廉等优点广泛应用于工厂自动化、工业控制、小区监控、水利自动报测等领域、但RS-485总线在抗干扰、自适应、通信效率等方面仍存在缺陷、一些细节的处理不当常会导致通信失败甚至系统瘫痪等故障、因此提高RS-485总线的运行可靠性至关重要、 1 RS-485接口电路的硬件设计
1.什么是源型、漏型?什么是上拉电阻?下拉电阻?什 么是线驱动输出、集电极开路输出、推挽式输出? 我们先来说说集电极开路输出的结构。集电极开路输出的结构如图1所示,右边的那个三极管集电极什么都不接,所以叫做集电极开路(左边的三极管为反相之用,使输入为“0”时,输出也为“0”)。对于图1,当左端的输入为“0”时,前面的三极管截止(即集电极c跟发射极e之间相当于断开),所以5v电源通过1k电阻加到右边的三极管上,右边的三极管导通(即相当于一个开关闭合);当左端的输入为“1”时,前面的三极管导通,而后面的三极管截止(相当于开关断开)。 我们将图1简化成图2的样子。图2中的开关受软件控制,“1”时断开,“0”时闭合。很明显可以看出,当开关闭合时,输出直接接地,所以输出电平为0。而当开关断开时,则输出端悬空了,即高阻态。这时电平状态未知,如果后面一个电阻负载(即使很轻的负载)到地,那么输出端的电平就被这个负载拉到低电平了,所以这个电路是不能输出高电平的。 再看图三。图三中那个1k的电阻即是上拉电阻。如果开关闭合,则有电流从1k电阻及开关上流过,但由于开关闭和时电阻为0(方便我们的讨论,实际情况中开关电阻不为0,另外对于三极管还存在饱和压降),所以在开关上的电压为0,即输出电平为0。如果开关断开,则由于开关电阻为无穷大(同上,不考虑实际中的漏电流),所以流过的电流为0,因此在1k电阻上的压降也为0,所以输出端的电压就是5v了,这样就能输出高电平了。但是这个输出的内阻是比较大的(即1kω),如果接一个电阻为r的负载,通过分压计算,就可以算得最后的输出电压为5*r/(r+1000)伏,即5/(1+1000/r)伏。所以,如果要达到一定的电压的话,r就不能太小。如果r真的太小,而导致输出电压不够的话,那我们只有通过减小那个1k的上拉电阻来增加驱动能力。但是,上拉电阻又不能取得太小,因为当开关闭合时,将产生电流,由于开关能流过的电流是有限的,因此限制了上拉电阻的取值,另外还需要考虑到,当输出低电平时,负载可能还会给提供一部分电流从开关流过,因此要综合这些电流考虑来选择合适的上拉电阻。 如果我们将一个读数据用的输入端接在输出端,这样就是一个io口了(51的io口就是这样的结构,其中p0口内部不带上拉,而其它三个口带内部上拉),当我们要使用输入功能时,只要将输出口设置为1即可,这样就相当于那个开关断开,而对于p0口来说,就是高阻态了。 对于漏极开路(od)输出,跟集电极开路输出是十分类似的。将上面的三极管换成场效应管即可。这样集电极就变成了漏极,oc就变成了od,原理分析是一样的。
串行端口一直被视为计算机最基础的外部连接设备之一,在过去它一直是大多数计算机不可缺少的组成部分虽然许多较新的系统在采用USB连接设备后已经彻底放弃了串行接口,但大多数调制解调器都任然在使用,不过计算机所带的串行端口一般不会超过两个。 串行端口(serial port),或称串口,主要用于串列式逐位元数据传输。常见的为一般电脑应用的RS-232(使用25针或9针连接器),工业电脑应用的半双工RS-485与全双工RS-422。 串口也叫串行接口,也称串行通信接口,按电气标准及协议来分包括RS-232-C,RS-422,RS485,USR等。RS-232-C,RS-422与RS-485标准只对接口的电气特性做出规定,不涉及接外挂程式,电缆或协议。USB是近几年新发展起来的新型接口标准,主要用于高速数据传输领域。 RS-232-C:也称标准串口,是目前最常用的一种串行通信接口。它是在1970年由美国电子工业协会(EIA)联合贝尔系统,调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。它的全名是“数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换口技术标准”。传统的RS-232-C接口标准有22根线,采用标准25芯D形插头座。后来的PC上使用简化了得9芯D 形插座。现在应用中25芯插头座以很少采用了,现在的电脑一般有两个串行口:COM1和COM2,你到计算机后能看到9针D形接口就是了。现在有很多手机数据线或者物流接收器都采用COM口与计算机项链。 RS-422:为改进RS-232通信距离短,速率低得缺点,RS-422定义了一种平衡通信接口,将传输速率提高到10Mb/s,传输距离延长到4000英尺(速率低于100kb/s 时),并允许在一条平衡总线上连接最多10个接收器。RS-422是一种单机发送,多机接收得单向,平衡传输规范,被命名为TIA/EIA-422-A标准。 RS-485:为了拓展应用范围EIA有在RS-422基础上制定了RS-485标准,增加了多点,双向通信能力,即允许多个发送器连接到一根总线上,同时增加发送器的驱动能力和冲突保护特性拓展了总线共模范围,后命名为TIA/EIA-485-A标准USB接口
第九章I/O端口 概述 S3C2410有117个多功能的输入输出引脚,这些端口是: — 端口A(GPA):23个输出口 — 端口B(GPB):11个输入输出口 — 端口C(GPC):16个输入输出口 — 端口D(GPD):16个输入输出口 — 端口E(GPE):16个输入输出口 — 端口F(GPF):8个输入输出口 — 端口G(GPG):16个输入输出口 — 端口H(GPH):11个输入输出口 每个端口可以根据系统配置和设计需求通过软件配置成相应的功能。在启动主程序之前,必须定义好每个引脚的功能。如果某个引脚不用作复用功能,则可以将它配置成IO脚。 初始的引脚状态被无缝配置好的以避免产生问题。 表1 端口配置见英文版Table 9-1. S3C2410A Port Configuration 端口控制描述 端口控制寄存器(GPACON-BGHCON) 在S3C2410中,大部分端口都是复用的,因此需要决定每个引脚使用哪个功能。端口控制寄存器PnCON决定每个引脚的功能。 如果GPF0 – GPF7 and GPG0 – GPG7用于掉电模式的唤醒信号,这些端口必须被配置成中断模式。 端口数据寄存器(GPADAT-GPHDAT) 如果端口被配置成输出端口,可以向PnDAT中的相关位写入数据;如果端口被配置成输入端口,可以从PnDAT中的相关位读入数据。 端口上拉电阻寄存器(GPBUP-GPHUP) 端口上拉电阻寄存器控制每个端口组的上拉电阻的使能和禁止。当相关位为0,上拉电阻使能;当相关位为1,上拉电阻禁止; 当端口上拉电阻寄存器使能时,不管引脚选择什么功能(输入、输出、数据、外部中断等),上拉电阻都工作。 外部中断控制寄存器(EXTINTN) 24个外部中断可响应各种信号请求方式。EXTINTn寄存器可以配置如下信号请求方式:低电平触发、高电平触发、上升沿触发、下降沿触发、双边沿触发。 这8个外部中断引脚具有数字滤波器。(见EINTFLTn相关)
51单片机IO端口的四种输入输出模式(by wuleisly) 单片机I O口的使用对所有单片机玩家来说都是“家常便饭”,但是你真的了解I O 口吗?你真的能按你的需要配置I O口吗? 一、准双向口输出 准双向口输出类型可用作输出和输入功能而不需重新配置 口线输出状态。这是因为当口线 输出为1时驱动能力很弱,允许外部装置将其拉低。当引脚输出为低时,它的驱动能力很强, 可吸收相当大的电流。(准双向口有3个上拉晶体管适应不同的需要) 准双向口读外部状态前,要先锁存为…1?,才可读到外部正确的状态. 二、强推挽输出 推挽输出配置的下拉结构与开漏输出以及准双向口的下拉 结构相同,但当锁存器为1时提供持续的强上拉。推挽模式一般用于需要更大驱动电流的情况。 三、仅为输入(高阻) 输入口带有一个施密特触发输入以及一个干扰抑制电路。 四、开漏输出配置(若外加上拉电阻,也可读) 当口线锁存器为0时,开漏输出关闭所有上拉晶体管。当作为一个逻辑输出时,这种配置方式必须有外部上拉,一般通过电阻外接到V c c。如果外部有上拉电阻,开漏的I/O口还可读外部状态,即此时被配置为开漏模式的I/O口还可作为输入I/O口。这种方式的下拉与准双向口相同。 开漏端口带有一个施密特触发输入以及一个干扰抑制电路。 关于I/O口应用注意事项: 1.有些是I/O口由低变高读外部状态时,读不对,实际没有损坏,软件处理一下即可。 因为1T的8051单片机速度太快了,软件执行由低变高指令后立即读外部状态,此时由于实际输出还没有变高,就有可能读不
对,正确的方法是在软件设置由低变高后加1到2个空操作指令延时,再读就对了. 有些实际没有损坏,加上拉电阻就OK了 有些是外围接的是NP N三极管,没有加上拉电阻,其实基极串多 大电阻,I/O口就应该上拉多大的电阻,或者将该I/O口设置为强 推挽输出. 2.驱动L E D发光二极管没有加限流电阻,建议加1K以上的限流电阻,至少也要加470欧姆以上 做行列矩阵按键扫描电路时,实际工作时没有加限流电阻,实际工作时可能出现2个I/O口均输出为低,并且在按键按下时,短接在一起,我们知道一个C MOS电路的2个输出脚不应该直接短接在一起,按键扫描电路中,此时一个口为了读另外一个口的状态,必须先置高才能读另外一个口的状态,而8051单?片机的弱上 拉口在由0变为1时,会有2时 钟的强推挽高输出电流输出到另外一个输出为低的I/O口,就有 可能造成I/O口损坏.建议在其中的一侧加1K限流电阻,或者在 软件处理上,不要出现按键两端的I/O口同时为低. 一种典型三极管控制电路: 如果用弱上拉控制,建议加上拉电阻R1(3.3K~10K),如果不加上拉电阻R1(3. 3K~10K), 建议R2的值在15K以上,或用强推挽输出。 典型发光二极管控制电路:
三、串行端口程序设计 1、实验目的 了解在Linux 环境下串行程序设计的基本方法;掌握终端的主要属性及设置方法;熟悉终端IO 函数的使用;完成串口的收发处理。 2、实验内容 读懂程序源代码,学习终端IO 函数tcgetattr(), tcsetattr(),tcflush()的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。 3、预备知识 有 C 语言基础;掌握 Makefile 的编写和使用;掌握 Linux 下的程序编译与交叉编译过程 4、实验设备及工具 硬件:UP-TECHPXA270-S 嵌入式开发板、PC 机Pentumn500 以上, 硬盘10G 以上。 软件:PC 机操作系统REDHAT LINUX 9.0 +MINICOM + ARM-LINUX 开发环境 5、实验步骤 (1)、将E盘下的03_tty复制到D:\PXA270\Share下;将虚拟机的共享打开; (2)、主机A的虚拟机添加串口,主机A的COM1与实验箱ttyS1相连,实验箱ttyS0与另一台PC机B相连; (3)、将每台虚拟机linux的/up-techpxa270/exp/basic/03_tty删除,将两台主机的D:\PXA270\Share\03_tty复制到虚拟机linux下的/up-techpxa270/exp/basic下;(4)、进入/up-techpxa270/exp/basic/03_tty 目录,使用vi 编辑器或其他编辑器阅读理解serial_rcv和serial_send的源代码。 (5)、分别编译serial_rcv和serial_send下的源文件生成可执行文件。 (6)、自主选择作为发送端或接收端,并修改相应的代码。 (7)、挂载PC机B的/up-techpxa270/exp到开发板的/mnt/nfs。 (8)、在开发板和PC机Alinux下运行可执行程序,一个发送数据,一个接收数据。 (9)、修改程序,使发送端发送一个特定字符给接收端,且发送端回显一个字符或一句话。 6、实验报告要求 (1)、写清每步实验步骤的具体操作内容。 答:①打开E盘找到03_tty文件复制到D:\PXA270\Share后解压到当前目录,打开虚拟机的文件共享功能,把共享目录设为D:\PXA270\Share(两台计算机进行都要进行以上设置)。 ②主机A的虚拟机添加串口,A的com1与试验箱的ttys1相连,实验箱ttyS0与另一 台PC机B相连。 ③将每台虚拟机linux的/up-techpxa270/exp/basic/03_tty删除,将两台主机的 D:\PXA270\Share\03_tty复制到虚拟机linux下的/up-techpxa270/exp/basic下。 ④进入/up-techpxa270/exp/basic/03_tty 目录,使用vi 编辑器或其他编辑器阅读理 解serial_rcv和serial_send的源代码。 ⑤分别编译serial_rcv和serial_send下的源文件生成可执行文件。 ⑥选择B作为发送方,A作为接收方。 ⑦挂载PC的/up-techpxa270/exp到开发板的/mnt/nfs。 ⑧在开发板和PC机上运行编译的程序,一个发送,一个接收。
串行端口工作原理 作者:Jeff Tyson (本文为博闻网版权所有,转载必须注明出处。) 本文包括: 1. 1. 引言 2. 2. 串行端口怎样传输数据 3. 3. 串行连接设备 4. 4. 流控制 5. 5. 了解更多信息 6. 6. 阅读所有外设类文章 串行端口一直被视作计算机最基础的外部连接设备之一,在过去的20多年时间里,它一直是大多数计算机不可或缺的组成部分。虽然许多较新的系统在采用USB 连接设备后,已经彻底放弃了串行端口,但大多数调制解调器都仍然在使用,一些打印机、掌上型电脑 和数码相机也是如此。不过,计算机所带的串行端口一般都不会超过两个。 PC 背面的两个串行端口 从本质上说,串行端口可提供标准的连接器和协议,允许我们将调制解调器等设备连接到计算机上。在本篇博闻网文章中,您将了解并行端口和串行端口的区别、每个针脚的作用以及流控制的含义。 串行端口怎样传输数据 作者:Jeff Tyson (本文为博闻网版权所有,转载必须注明出处。) 本文包括: 1. 1. 引言 2. 2. 串行端口怎样传输数据 3. 3. 串行连接设备 串行端口工作原理
4. 4. 流控制 5. 5. 了解更多信息 6. 6. 阅读所有外设类文章 当今人们使用的所有计算机操作系统都支持串行端口,因为其“入驻”计算机已有数十年的历史了。而并行端口的发明要晚得多,速度也比串行端口快得多。USB端口的历史只有数年,它很可能在接下来的几年内全面取代串行端口和并行端口。 之所以取名为“串行”端口,是因为这种端口会将数据“串行化”。更具体地说,它一次获取一个字节的数据并传输该字节的8位。这样做的优势在于,串行端口只需要一条线路就能传输8个位,而并行端口则需要8条。相应的劣势在于,其传输数据的用时是拥有八条线路时的8倍。此外,串行端口还可以降低线缆成本,使线缆更加小巧。 在发送数据的每个字节之前,串行端口会发送一个开始位,这是一个值为0的单个位。在发送完数据的每个字节之后,它将发送一个停止位,表示该字节已传输完成。此外,它还可以发送奇偶校验位。 串行端口也称为通信(COM)端口,是一种双向端口。在双向通信中,每个设备都可以接收数据和传输数据。串行设备使用不同的针脚来接收和传输数据——如果使用相同的针脚,通信将限制为半双工模式,这表示信息一次只能在一个方向上传播。使用不同的针脚可以实现全双工通信,在这种模式中,信息可以同时在两个方向上传播。 这个40针的双列直插封装(DIP)芯片是美国国家半导体公司NS16550D UART芯片的一种型号。 串行端口依靠特殊的控制器芯片通用异步接收/传输器(UART)来实现自己的功能。UART芯片从计算机的系统总线获得并行输出,然后将其转换成串行形式,以便通过串行端口传输。 为了提高效率,大多数UART芯片都内置有16到64千字节的缓冲区。利用这个缓冲区,芯片便可以在处理要流向串行端口的数据的同时,缓存从系统总线流入的数据。大多数标准串行端口的最大传输速率为115Kbps(千比特每秒),增强型串行端口(ESP)和超级增强型串行端口(Super ESP)等高速串行端口可以实现460Kbps的数据传输速率。 串行连接设备 作者:Jeff Tyson (本文为博闻网版权所有,转载必须注明出处。)
同步串行接口配置举例 本节包含下列例子: 开始接口配置举例 下例显示如何在串行接口上开始接口配置。它对串行接口0指定点对点(PPP)包装。 interface serial 0 encapsulation ppp Cisco 7500上的同一例子需要下列命令: interface serial 1/0 encapsulation ppp 配置DCE方式的串行接口举例 下例对Cisco 7500系列配置DCE方式的串行接口。由于DTE不返回同步时钟发送启用(SCTE)信号,所以需要transmit-clock-internal命令。 interface serial 0/0 ip address 170.1.8.2 255.255.255.0 clockrate 72000 transmit-clock-internal 下例对Cisco 4000系列路由器配置DCE方式的串行接口。由于DTE不返回同步时钟发送启用(SCTE)信号,所以需要dce-terminal-timing-enable命令。本例中,接受缺省NRZ编码和16位CRC。 interface serial 1 clockrate 72000 dce-terminal-timing-enable nrz-encoding G.703串行接口配置举例
下例显示Cisco 7500系列路由器E1-G.703/G.704串行端口适配器上串行接口9/1/3的基本配置。本例中,接口配置成帧(G.704)操作,时间槽16用于。 interface serial 9/1/3 ip address 1.1.1.10 255.255.255.0 no keepalive no fair-queue timeslot 1-31 crc4 ts16 JT2 6.3-MHz串行接口配置举例 下例显示Cisco 7500系列路由器PA-2JT2串行端口适配器上串行接口1/0/0的配置。本例中,接口配置成使用内部时钟源而不是缺省线派生时钟源的时钟,并允许帧对搜索条件使用CRC5。 interface serial 1/0/0 ip address 1.1.1.10 255.255.255.0 clock source internal crc bits 5 no shutdown 逆转举例 下例逆转串行接口3/1/0的: interface serial 3/1/0 invert data 下例逆转串行端口3/0的时钟信号: nterface serial 3/0