运动控制系统 课后习题答案
2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少?
解:10000.02(100.98) 2.04(1)
n n s
n rpm D s ?==??=-
系统允许的静态速降为2.04rpm
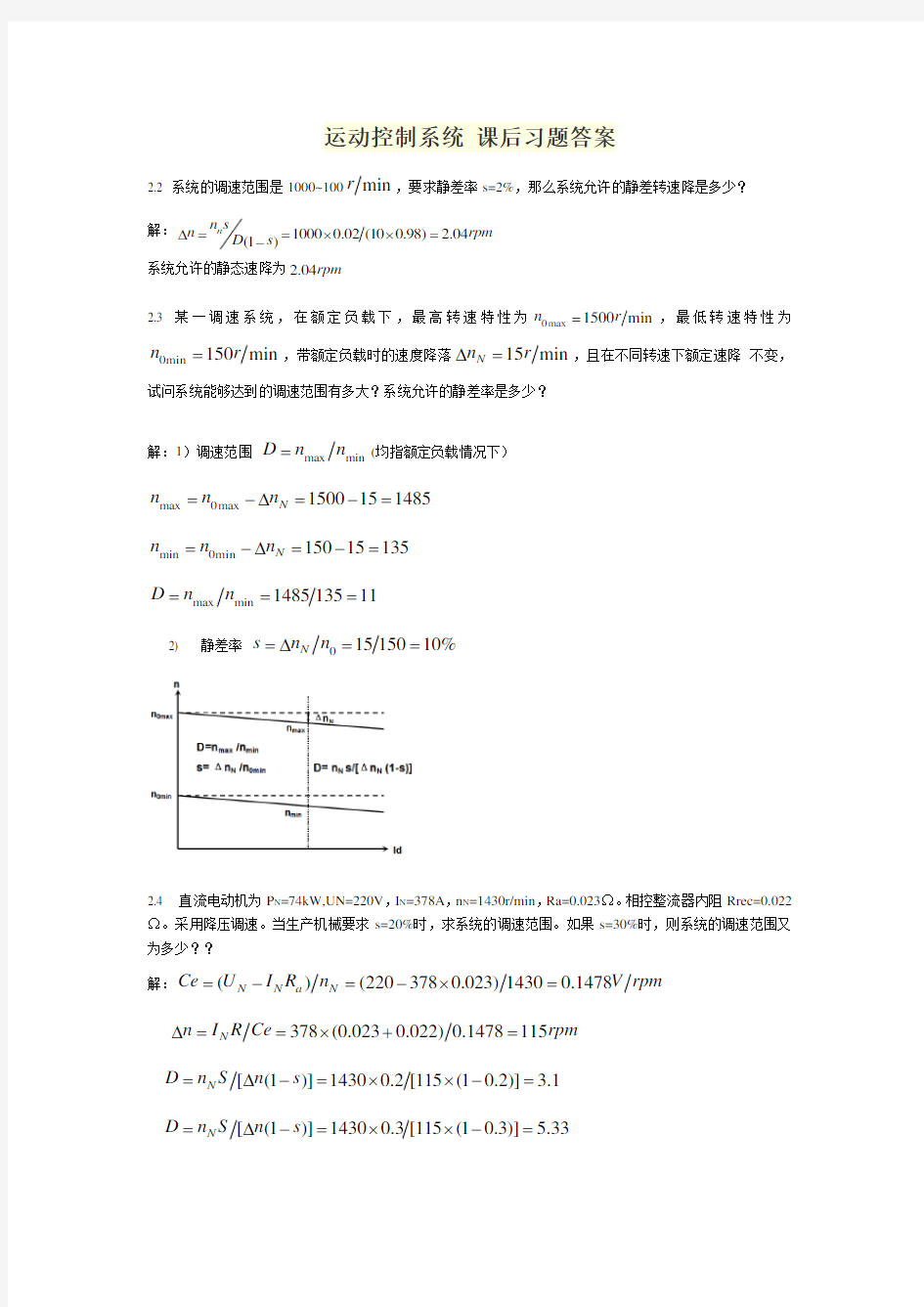
2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为
0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降 不变,
试问系统能够达到的调速范围有多大?系统允许的静差率是多少?
解:1)调速范围
max min
D n n =(均指额定负载情况下)
max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n ===
2) 静差率
01515010%N s n n =?==
2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。相控整流器内阻Rrec=0.022Ω。采用降压调速。当生产机械要求s=20%时,求系统的调速范围。如果s=30%时,则系统的调速范围又为多少?? 解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-?=
378(0.0230.022)0.1478115N n I R rpm ?==?+=
[(1)]14300.2[115(10.2)] 3.1N D n S n s =?-=??-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =?-=??-=
2.5 某龙门刨床工作台采用V-M 调速系统。已知直流电动机
60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V ?min/r,
求:
(1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?
(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少? 解:(1)3050.180.2274.5/min N N n I R Ce r ?=?=?=
(2)
0274.5(1000274.5)21.5%N N S n n =?=+=
(3)
(1)]10000.05[200.95] 2.63/min N n n S D s r ?=-=??=
2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*
8.8u
U V =、比例调节器放大系数
2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。求:(1)输出电压d U ;(2)若把反馈线断
开,d U 为何值?开环时的输出电压是闭环是的多少倍?(3)若把反馈系数减至γ=0.35,当保持同样的输出电压时,给定电压*
u U 应为多少? 解:(1)*
(1)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=??+??=
(2) 8.8215264d U V
=??=,开环输出电压是闭环的22倍
(3)
*(1)12(12150.35)(215) 4.6u d p s p s U U K K K K V
γ=+=?+???=
2.7 某闭环调速系统的调速范围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1)()s n s n D
N N -?=1/
1015002%/98%N n =???
15002%/98%10 3.06/min N n r ?=??=
2)()
7.31106.3/1001/=-=-??=cl op n n K
2.8 某闭环调速系统的开环放大倍数为15时,额定负载下电动机的速降为8 r/min ,如果将开环放大倍数提高到30,它的速降为多少?在同样静差率要求下,调速范围可以扩大多少倍? 解:
()()12881511=?+=?+=?cl op n K n
如果将开环放大倍数提高到30, 则速降为:
()()rpm K n n op cl 13.4301/1281/=+=+?=?
在同样静差率要求下,D 可以扩大937
.1/21
=??cl cl n n 倍
2.9 有一V-M 调速系统:电动机参数P N =2.2kW, U N =220V , I N =12.5A, n N =1500 r/min ,电枢电阻R a =1.5Ω,电枢回路电抗器电阻RL=0.8Ω,整流装置内阻R rec =1.0Ω,触发整流环节的放大倍数K s =35。要求系统满足调速范围D=20,静差率S<=10%。
(1)计算开环系统的静态速降Δn op 和调速要求所允许的闭环静态速降Δn cl 。 (2)采用转速负反馈组成闭环系统,试画出系统的原理图和静态结构图。
(3)调整该系统参数,使当U n *=15V 时,I d =I N ,n=n N ,则转速负反馈系数 α应该是多少? (4)计算放大器所需的放大倍数。 解:(1)
()()/22012.5 1.5/1500201.25/15000.134min/N N a e
e n U I R C C V r
=-??=-?==
()//12.5 3.3/0.134307.836/min
N N e
op N e n U I R C n I R C r ∑∑=-???=?=?=
()()/1150010%/20*90%8.33/min N N n n s D s r ?=-=?=()
所以,min
/33.8r n cl =?
(2)
(3)(4)()()()()[]
()()[]K C R I K KU K C R I U K K n
e d n e d n s p +-+=+-=*
*1/1/1/α
()/1307.836/8.33135.955op cl K n n =??-=-=
()()()150035.95515/135.95512.5 3.3/0.134135.955α??=??+?-?+????
r V min/0096.0=?α
可以求得,*35.955*0.134
14.34*35*0.0096
e p s K C K K α=
==
也可以用粗略算法:
n U U n n
α=≈*
,01.01500
15
*===n U n α /p e s K KC K α=,()35.9550.134/350.0113.76p K =??=
2.10 在题 2.9的转速负反馈系统中增设电流截止环节,要求堵转电流N
dbl
I I 2≤,临界截止电流
N dcr I I 2.1≥,应该选用多大的比较电压和电流反馈采样电阻?要求电流反馈采样电阻不超过主电路总
电阻的1/3 ,如果做不到,需要增加电流反馈放大器,试画出系统的原理图和静态结构图,并计算电流反馈放大系数。这时电流反馈采样电阻和比较电压各为多少? 解:(1)
A I I N dbl 252=≤,A I I N dcr 152.1=≥ s com s com dcr R U R U I /15/=?=
()
()Ω
=?+=?+≈5.1/1525/*
s s com s com n dbl R R U R U U I ,
V U com 5.225.115=?=
(2)
()(/3) 1.0 1.50.8/3 1.1,(/3)
1.1,
s s R R R R ∑∑=++=Ω>=Ω不符合要求,取需加电流反馈放大器
由于需要的检测电阻值大,说明要求的电流信号值也大。要同时满足检测电阻小和电流信号大的要求,则必须采用放大器,对电流信号进行放大。为此, 取 1.1s R =Ω,则15 1.116.5com dcr s U I R V =?=?=
(3) 当dcr d
I I >时,有
()[
]()()[
]
()[]()
()()[
](
)()()
[]
K C I R K K K R K C U K U K K K C RI K C U I R K K K K C U K K n e d s i s p e com i n s p e d e com d s i s p e n s p ++-++=+-+--+=1/1/1/1/1/**
当n=0时,
()()()**//dbl p s n i com p s i s n i com i s I K K U K U R K K K R U K U K R =++≈+
()()251516.5/1.115/22.513.5 1.36i i i K K K =+?=-=
2.11在题2.9的系统中,若主电路电感L=50mH ,系统运动部分的飞轮惯量2
2GD
=1.6Nm ,整流装置采
用三相零式电路,试判断按题2-9要求设计的转速负反馈系统能否稳定运行?如要保证系统稳定运行,允许的最大开环放大系数是多少?
解:
mH L 50=,226.1Nm GD =, 3.3R ∑=Ω,0.134/e C V rpm =
()()2/0.05/3.30.015/375 1.6 3.3/3750.1340.13430/3.145.28/64.330.0820.00333l m e m s T L R s
T GD R C C s T s
∑∑=====????===
()()222/0.0820.0150.003330.00333/0.0151*0.003330.00150.00333/0.0000498330.52
l m l s s s K T T T T T T ????<++=?++??????=+=??() 可见与前面的K>35.955相矛盾,故系统不稳定。要使系统能够稳定运行,K 最大为30.52。 2.12 有一个晶闸-电动机调速系统,已知:电动机:kW P N 8.2=,V U N 220=,A I N 6.15=,
1500=N n r/min ,a R =1.5Ω,整流装置内阻rec R =1Ω, 电枢回路电抗器电阻L R =0.8Ω, 触发整流环节
的放大倍数35=s K 。
(1)系统开环工作时,试计算调速范围30=D 时的静差率s 值。 (2)当30=D ,%10=s 时,计算系统允许的稳态速降。
(3)如组成转速负反馈有静差调速系统,要求30=D ,%10=s ,在V U n 10*
=时N d I I =,N n n =,计
算转速负反馈系数α和放大器放大系数p K 。 解:
()r V C e m in/1311.01500/5.16.15220=?-=
(1)
()min 0min /15.6 3.3/0.1311392.68/min 1500/3050
/392.68/392.685088.7%
op N e op n I R C r n s n n ∑?=?=?====??=+=
(2)
()min
/56.59.0/550/1.0r n n n ==?+??=
(3)
()()??
???=+-+=∑e s p e d e n s p C K K K K C I R K C U K K n /1/1/*α ()()()()
()?????=-=-??=+-+=∑5
.52156.5/48.2971/1/6.151/1500*cl op e e n s p n n K K C R K C U K K
2.13旋转编码器光栅数1024,倍频系数4,高频时钟脉冲频率MHz 1f 0
=,旋转编码器输出的脉冲个数
和高频时钟脉冲个数均采用16位计数器,M 法测速时间为0.01s ,求转速
min /r 1500n =和
min /r 150n =时的测速分辨率和误差率最大值。
解:
(1)M 法:分辨率min /465.101
.04102460
60r ZT Q
c =??==
最大误差率:→=
c
ZT M n 1
60
min /1500r n =时,102460
01
.0102441500601=???==
c nZT M
min /150r n =时,4.10260
01
.010*********=???==c nZT M min /1500r 时,%098.0%1001024
1%1001%1max =?=?=
M δ min /150r 时,%98.0%1004
.1021%1001%1max =?=?=
M δ 可见M 法适合高速。 (2)T 法: 分辨率:
min /1500r n =时,min /171150041025101601500410246062
02r Zn f Zn Q =??-????=-=
min /150r n =时,min /55.1150
410241016015041024606
2
02r Zn f Zn Q =??-????=-=
最大误差率:2
060ZM f n
=
,Zn
f M 02
60=
,
当min /1500r n =时,77.915004102410606
2=???=
M 当min /150r n =时,7.97150
4102410606
2=???=
M min /1500r n =时,%4.11%1001
77.91
%10011%2max =?-=
?-=
M δ
min /150r n =时,%1%1001
7.971
%1001
1
%2max =?-=
?-=
M δ
可见T 法适合低速
习题三
3.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压*
nm U =15V ,N n =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,e C =0.127V ·min/r ,求:(1)当系统稳定运行在*
n U =5V ,
dL I =10A 时,系统的n 、n U 、*i U 、i
U 和c U 各为多少?(2)当电动机负载过大而堵转时,*
i U 和c
U 各为多少? 解:(1)
*
***
*0*/15/15000.01/55,
5000.01/150.375/400.375*10 3.750.127*50010*2
4.17520500,5, 3.75,nm
N n
n
im
dm i d i d dL e N dL C s
s s n i i c U n V rpm V rpm U V
U V n rpm
V rpm
U V V A I A
U I V U U E I R C n I R U V K K K n rpm U V U U V U αα
ββ=====
=
==
======+++==
=======当转速即
4.175v
=
(2)堵转时,V I U dm i 15*
==β,
()040*2
420
e d d dm c s s s C n I R U I R U V K K K +=====
3.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。已知参数:电动机:N P =3.7kW ,
N U =220V ,N I =20A ,N n =1000 r/min ,电枢回路总电阻R =1.5Ω,设cm im nm
U U U ==*
* =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系数s K =40。试求:
(1)电流反馈系数β和转速反馈系数α。
(2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。
解:1)
*
*880.2/0.008/401000im nm dm N U V U V V A V rpm I A
n rpm
βα======
2)
040*1.560d dl e N dl U E I R C n I R A V
∑∑=+=+=Ω=
这时: *8,0n n U V U ==,ASR 处于饱和,输出最大电流给定值。
*8,8,i i U V U V ==
06040 1.5C d S U U K V ===
3.3 在转速、电流双闭环调速系统中,调节器ASR ,ACR 均采用PI 调节器。当ASR 输出达到*
im U =8V 时,主电路电流达到最大电流80A 。当负载电流由40A 增加到70A 时,试问:(1)*i U
应如何变化?(2)c U 应如何变化?(3)c U 值由哪些条件决定? 解: 1)
*
80.1/80im dm U V V A I A
β===
因此当电流从40A ?70A 时, *i U 应从4V ?7V 变化。
2) C U 要有所增加。
3)
C U 取决于电机速度和负载大小。因为 0d dl e N dl U E I R C n I R
∑
∑
=+=+
(
)0e d d c s s
C n I R U U K K +== 3.5 某反馈控制系统已校正成典型I 型系统。已知时间常数T=0.1s, 要求阶跃响应超调量σ≤10%。 (1) 系统的开环增益。
(2) 计算过渡过程时间s t 和上升时间r t ;
(3) 绘出开环对数幅频特性。如果要求上升时间r t <0.25s, 则K=?,σ%=? 解:取0.69,0.6,%9.5%KT
ξσ===
(1) 系统开环增益:0.69/0.69/0.1 6.9(1/)K T s ===
(2) 上升时间 3.30.33r t T S ==
过度过程时间:
3
660.10.6s n
t T s ξω≈
==?=
(3)
如要求0.25r
t s <,查表
3-1则应取
1,0.5KT ξ== , 2.4 2.4*0.10.24r t T s
=== 这时
1/10K T ==,超调量=16.3%。
3.6有一个系统,其控制对象的传递函数为1
01.010
1)(1+=+=
s s K s W obj τ,要求设计一个无静差系统,在阶跃输入下系统超调量σ%≤5%(按线性系统考虑)。试对系统进行动态校正,决定调节器结构,并选择其参数。
解:按典型I 型系统设计,选0.5,0.707,
3-1% 4.3%KT
ξσ===查表,得。
选I 调节器,
1
(),W s s
τ=
校正后系统的开环传递函数为
110
(),
T 0.01(0.011)
W s s s ττ=
+这样,=, K=10/,已选KT =0.5, 则K =0.5/T=50, 所以
10/10/500.2K S τ===,积分调节器:11()0.2W s s s
τ=
=。
3.7有一个闭环系统,其控制对象的传递函数为)
102.0(10
)1()(1+=
+=
s s Ts s K s W obj ,要求校正为典型Ⅱ型系统,在阶跃输入下系统超调量σ%≤30%(按线性系统考虑)。试决定调节器结构,并选择其参数。 解:应选择PI 调节器,1
(1)(1)(),()(1)
PI PI PI K s K s K W s W s s s s Ts ττττ++==+校正后系统的开环传递函数 ,对照典型Ⅱ型系统, 1/,
h 83-4PI K K K hT ττσ==,选=, 查表, %=27.2%,满足设计要求。 这样
8*0.020.16hT s τ===,
12222
181
175.78,/175.78*0.16/10 2.8122*8*0.02PI h K K K K h T τ++=
=====
3.8在一个由三相零式晶闸管整流装置供电的转速、电流双闭环调速系统中,已知电动机的额定数据为:60=N P kW , 220=N U V , 308=N I A , 1000=N n r/min , 电动势系数e C =0.196 V·
min/r , 主回路总电阻R =0.18Ω,触发整流环节的放大倍数s K =35。电磁时间常数l T =0.012s,机电时间常数m T =0.12s,电流反馈滤波时间常数i T 0=0.0025s,转速反馈滤波时间常数n T 0=0.015s 。额定转速时的给定电压(U n *
)N =10V,
调节器ASR ,ACR 饱和输出电压U im *
=8V,U cm =6.5V 。
系统的静、动态指标为:稳态无静差,调速范围D=10,电流超调量i σ≤5% ,空载起动到额定转速时的转速超调量n σ≤10%。试求:
(1)确定电流反馈系数β(假设起动电流限制在1.1N I 以内)和转速反馈系数α。
(2)试设计电流调节器ACR,计算其参数R i, 、C i 、C Oi 。画出其电路图,调节器输入回路电阻R 0=40Ωk 。 (3)设计转速调节器ASR,计算其参数R n 、C n 、C On 。(R 0=40k Ω) (4)计算电动机带40%额定负载起动到最低转速时的转速超调量σn 。 (5)计算空载起动到额定转速的时间。 解:(1)*
/8/(1.1*)8/3390.0236/im dm N U I V I V A V A β====
10/10000.01min/V r α==
(2)电流调节器设计 确定时间常数:)0.00333s
a T s =
)0.0025oi b T s =
0)0.00250.003330.00583i i s c T T T s ∑=+=+=
电流调节器结构确定: 因为5%i
σ≤,可按典型I 型系统设计,选用PI 调节器,(1)
()i i ACR i K S W S S
ττ+=
,
电流调节器参数确定:
1
0.012,0.5,0.5/85.76i l I i I i T s K T K T s τ-∑∑=====选,
85.760.0120.18
0.224350.0173
I i i s K R K K τβ??=
==?。
校验等效条件:185.76ci
I K s ω-==
1111)1101.01330.00333)79.06)115.52ci
S ci
ci
a T
b S
c s ωωω--==>?==<===>电力电子装置传递函数的近似条件:忽略反电势的影响的近似条件:
可见满足近似等效条件,电流调节器的实现:选0
40R K
=,则:
00.224408.96i i R K R K K ==?=, 取9K.
由此
33
000/0.012/(910) 1.334/40.0025/40100.25i i i i i C R F C T R F
τμμ==?===??=
(3)速度调节器设计 确定时间常数: a) 电流环等效时间常数1/
I K :因为0.5I i K T ∑=
则 1/220.005830.01166I i K T s ∑==?=
b) 0.015on T s =
c)
1/0.011660.0150.02666n I on T K T s ∑=+=+=
速度调节器结构确定:
按照无静差的要求,应选用PI 调节器,
(1)
()n n ASR n K s W s s
ττ+=
, 速度调节器参数确定:
,5,0.1333n n n n hT h hT s ττ∑∑====取
2
222216
168.822250.02666
(1)60.02360.1960.12
6.94
2250.010.180.02666
N n e m n n h K s h T h C T K h RT βα-∑∑+===??+???=
==????校验等效条件:
11/168.820.133322.5cn N N n K K s ωωτ-===?=
1101185.76
)40.43
330.005831185.76
)25.2330.015
I cn
i I cn
n K a s T K b s T ωω-∑-==>==>电流环近似条件:转速环小时间常数近似:
可见满足近似等效条件。 转速超调量的校验 (空载Z=0)
max *3080.180.02666
%2*(
)()281.2% 1.10.19610000.1211.23%10%
n N n b m T C n z C n T σλ∑???=-=?????=>
转速超调量的校验结果表明,上述设计不符合要求。因此需重新设计。 查表,应取小一些的h ,选h=3进行设计。 按h=3,速度调节器参数确定如下:0.07998n
n hT s τ∑==
2222
(1)/24/(290.02666)312.656(1)/240.02360.1960.12/(230.010.180.02666)7.6
N n n e m n K h h T s
K h C T h RT βα-∑∑=+=??==+=???????=校验等效条件:11/312.6560.0799825cn
N N n K K s ωωτ-===?=
1/21/211/2
1/2
1
)1/3(/)1/3(85.76/0.00583)40.43)1/3(/)
1/3(85.76/0.015)
25.2I i cn I on cn
a K T s
b K T s ωω-∑-==>==>
可见满足近似等效条件。 转速超调量的校验:
272.2% 1.1(3080.18/0.1961000)(0.02666/0.12)9.97%10%n σ=??????=<
转速超调量的校验结果表明,上述设计符合要求。 速度调节器的实现:选0
40R K
=,则07.640304n n R K R K =?=?=,取310K 。
33
0/0.07998/310100.2584/40.015/4010 1.5n n n on on C R F C T R F
τμμ==?===??=
4) 40%额定负载起动到最低转速时:
%272.2%(1.10.4)(3080.18/0.196100)(0.02666/0.12)63.5%n σ=??-????=
5) 空载起动到额定转速的时间是:(书上无此公式)
仅考虑起动过程的第二阶段。
222()(),
()375375375m dm dL dm dL e L dm dL
e m
e
m e
GD dn
dn C I I R I I R T T I I GD GD R dt
dt C T C C C --=-===-根据电机运动方程:所以:*0.196*0.12*1000
0.385()(1.1*3080)*0.18
e m dm dL C T n t s I I R ===--
3.10 有一转速、电流双闭环调速系统,主电路采用三相桥式整流电路。已知电动机参数为:P N =500kW ,U N =750V ,I N =760A ,n N =375 r/min ,电动势系数C e =1.82V ·min/r, 电枢回路总电阻R=0.14Ω,允许电流过载倍数λ=1.5,触发整流环节的放大倍数K s =75,电磁时间常数l T =0.031s,机电时间常数m T =0.112s,电流反馈滤波时间常数i T 0=0.002s,转速反馈滤波时间常数n T 0=0.02s 。设调节器输入输出电压U nm *
=U im *
= U nm =10V,调节器输入电
阻R 0=40k Ω。
设计指标:稳态无静差,电流超调量i σ≤5%,空载起动到额定转速时的转速超调量n σ≤10%。电流调节器已按典型I 型系统设计,并取参数KT=0.5。 (1)选择转速调节器结构,并计算其参数。
(2)计算电流环的截止频率ci ω和转速环的截止频率cn ω,并考虑它们是否合理?
解:(1)
*
*100.00877/1.5*760
10
0.0267min/375
im dm nm
N U V A
I U V r n βα====
==
电流调节器已按典型I 型系统设计如下:
确定时间常数:)0.00176)0.002)0.00367S oi
i a T s
b T s
c T s
∑===
电流调节器结构确定:因为σ%≤5%,可按典型I 型系统设计,选用PI 调节器, W ACR (s)=K i (τi s+1)/τi s , T l /T ∑i =0.031/0.00367=8.25<10
电流调节器参数确定:τi =T l =0.031s , K I T ∑i = 0.5, K I = 0.5/T ∑i =136.24 s -1
/136.240.0310.14/750.008770.899i I I s K K T R K β==???=
校验等效条件:ωci =K I =136.24 s -1
11/21/211/21/21)1/31/30.00167199.6)(1/)3(1/0.1120.031)50.9)1/3(1/)1/3(1/0.001670.002)182.39s ci
m l ci
s oi ci
a T s
b T T s
c T T s ωωω---=?=>=?=<=?=>
可见满足近似等效条件。
电流调节器的实现:选R 0=40K ,则
00.8994035.96i i R K R =?=?= 取36K
33
000/0.031/36100.864/40.002/40100.2i i i i i C T R F C T R f
μμ==?===??=
速度调节器设计 确定时间常数:
a) 电流环等效时间常数1/K I :因为K I T ∑i = 0.5 则1/K I =2T ∑i =2*0.00367=0.00734s b) b)T on =0.02s
c) c)T ∑n =1/K I +T on =0.00734+0.02=0.02734s 速度调节器结构确定:
按照无静差的要求,应选用PI 调节器, W ASR (s)=K n (τn s+1)/τn s 速度调节器参数确定:
τn =hT ∑n ,选h=5,则τn =hT ∑n =0.1367s,
K N =(h+1)/(2h 2T 2∑n )=6/2*25*0.027342=160.54 s -2
K n =(h+1)βC e T m /(2h αRT ∑n )= 6*0.00877*1.82*0.112/2*5*0.0267*0.14*0.02734=10.5 校验等效条件:ωcn =K N /ω1=K N τn =160.54*0.1367 =21.946 s -2
a) 1/3(K I /T ∑i )1/2=1/3(136.24/0.00367)1/2=64.22s -1>ωcn b) 1/3(K I /T on )1/2=1/3(136.24/0.02)1/2=27.51s -1>ωcn 可见满足近似等效条件。
速度调节器的实现:选R 0=40K ,则 R n =K n *R 0=10.5*40=420K
由此 C n =τn /R n =0.1367/420*103=0.325μF 取0.33μF C 0n =4T 0n /R 0=4*0.02/40*103=2μF 2) 电流环的截止频率是:ωci =K I =136.24 s -1
速度环的截止频率是:
ωcn =21.946 s -2
从电流环和速度环的截止频率可以看出,电流环比速度环要快,在保证每个环都稳定的情况下,再求
系统的快速性,充分体现了多环控制系统的设计特点。
3.11 在一个转速、电流双闭环V-M 系统中,转速调节器ASR ,电流调节器ACR 均采用PI 调节器。 (1)在此系统中,当转速给定信号最大值U nm *=15V 时,n=n N =1500 r/min;电流给定信号最大值U im *
=10V 时,允许最大电流I dm =30A,电枢回路总电阻R=2Ω,晶闸管装置的放大倍数K s =30 ,电动机额定电流I N =20A ,电动势系数C e =0.128V ·min/r 。现系统在U n *
=5V ,I dl =20A 时稳定运行。求此时的稳态转速n=? ACR 的输出电压U c =?
(2)当系统在上述情况下运行时,电动机突然失磁(Φ=0) , 系统将会发生什么现象? 试分析并说明之。若系统能够稳定下来,则稳定后n=? U n =? U i *
=? U i =? I d =? U c =?
(3)该系统转速环按典型Ⅱ型系统设计, 且按M rmin 准则选择参数,取中频宽h=5, 已知转速环小时间常数T
∑n
=0.05s ,求转速环在跟随给定作用下的开环传递函数,并计算出放大系数及各时间常数。
(4)该系统由空载(dL I =0)突加额定负载时,电流d I 和转速n 的动态过程波形是怎样的?已知机电时间常数
m T =0.05s,计算其最大动态速降max n ?和恢复时间v t 。
1) α= U*nm /n N =15/1500=0.01 Vmin/r β= U*im /I dm = 10/30=0.33 V/A U*n =5 V ,n=U*n /α=5/0.01=500 r/min
U c =U d0/K s =(E+I d R ∑)/K s =(C e n+I dLl R ∑)/Ks=(0.128*500+20*2)/30=3.467 V
2) 在上述稳定运行情况下,电动机突然失磁(Φ=0)则电动机无电动转矩,转速迅速下降到零,转速调节器很快达到饱和,要求整流装置输出最大电流I dm 。因此,系统稳定后, n=0,U n =0
U*i =U*im =10, U i =U*i =10 I d =I dm =30A
U c =U d0/K s =(E+I d R ∑)/K s =(0+30*2)/30=2 V
3) 在跟随给定作用下,转速环处于线性状态,此时系统的开环传递函数是:
()()()
112
++=
∑s T s s K s W n n N n τ
τn =hT ∑n =5*0.05=0.25s T ∑n =0.05s
K N =(h+1)/2h 2T 2=6/2*25*0.052=48s-2
4) 空载突加额定负载时,转速有动态降落。(p93,94)
Δn b =2(λ-z)Δn N T ∑n /T m =2*(1-0)*20*2/0.128*(0.05/0.05)= 625 r/min [ C b =2FK 2T=2I dN RT ∑n /C e T m =2*20*2*0.05/0.128*0.05=625 r/min ] 最大动态速降:Δn max =(ΔC max /C b )*Δn b =81.2%*625 =507.5 r/min 恢复时间:t v =8.8T=8.8*0.05=0.44s(p81表)
习题五