第9章 线性系统的状态空间分析与综合 重点与难点 一、基本概念 1.线性系统的状态空间描述 (1)状态空间概念 状态 反映系统运动状况,并可用以确定系统未来行为的信息集合。 状态变量 确定系统状态的一组独立(数目最少)变量,它对于确定系统的运动状态是必需的,也是充分的。 状态向量 以状态变量为元素构成的向量。 状态空间 以状态变量为坐标所张成的空间。系统某时刻的状态可用状态空间上的点来表示。 状态方程 状态变量的一阶导数与状态变量、输入变量之间的数学关系,一般是关于系统的一阶微分(或差分)方程组。 输出方程 输出变量与状态变量、输入变量之间的数学关系。 状态方程与输出方程合称为状态空间描述或状态空间表达式。线性定常系统状态空间表达式一般用矩阵形式表示: ???+=+=Du Cx y Bu Ax x & (9.1) (2)状态空间表达式的建立。系统状态空间表达式可以由系统微分方程、结构图、传递函数等其他形式的数学模型导出。 (3)状态空间表达式的线性变换及规范化。描述某一系统的状态变量个数(维数)是确定的,但状态变量的选择并不唯一。某一状态向量经任意满秩线性变换后,仍可作为状态向量来描述系统。状态变量选择不同,状态空间表达式形式也不一样。利用线性变换的目的在于使系统矩阵A 规范化,以便于揭示系统特性,利于分析计算。满秩线性变换不改变系统的固有特性。 根据矩阵A 的特征根及相应的独立特征向量情况,可将矩阵A 化为三种规范形式:对角形、约当形和模式矩阵。 (4)线性定常系统状态方程解。状态转移矩阵)(t φ(即矩阵指数At e )及其性质:
i . I =)0(φ ii .A t t A t )()()(φφφ ==& iii. )()()()()(122121t t t t t t φφφφφ±=±=+ iv. )()(1 t t -=-φφ v. )()]([kt t k φφ= vi. )( ])exp[()exp()exp(BA AB t B A Bt At =+= vii. )( )ex p()ex p(11非奇异P P At P APt P --= 求状态转移矩阵)(t φ的常用方法: 拉氏变换法 =)(t φL -1])[(1--A sI (9.2) 级数展开法 ΛΛ++++ +=k k At t A k t A At I e ! 12122 (9.3) 齐次状态方程求解 )0()()(x t t x φ= (9.4) 非齐次状态方程式(9.1)求解 ?-+=t Bu t x t t x 0d )()()0()()(τττφφ (9.5) (5)传递函数矩阵及其实现 传递函数矩阵)(s G :输出向量拉氏变换式与输入向量拉氏变换式之间的传递关系 D B A sI C s G +-=-1)()( (9.6) 传递函数矩阵的实现:已知传递函数矩阵)(s G ,找一个系统},,,{D C B A 使式(9.6)成立,则将系统},,,{D C B A 称为)(s G 的一个实现。当系统阶数等于传递函数矩阵阶数时,称该系统为)(s G 的最小实现。 传递函数矩阵的实现并不唯一。实现的常用标准形式有可控标准形实现、可观测标准形实现、对角形实现和约当形实现等。 (6)线性定常连续系统的离散化及其求解 对式(9.1)表示的线性定常数连续系统进行离散化,导出的系统离散状态空间描述
第九章系统的状态变量分析 1、内容简介 在系统的状态变量分析中,介绍了状态和状态变量的基本概念,由电路原理图建立状态方程的方法,由微分方程建立状态方程的方法,由系统模拟框图建立状态方程的方法,状态方程的时域和变换域求解,状态矢量的线性变换,系统的可控制性和可观测性的基本概念,离散系统的状态方程的建立和求解。最后介绍了用MATLAB求解系统的状态方程。 2、学习目标 1、理解系统的状态与状态空间的概念。 2、掌握连续系统由电路、微分方程、系统模拟框图和系统函数建立状态方程。 3、掌握离散系统由差分方程、系统模拟框图和系统函数建立状态方程。 4、了解状态方程求解的基本方法,能够用MATLAB求解系统的状态方程。 3、重点难点 1.系统状态和状态空间的概念。 2.如何建立系统的状态方程。 4、应用 利用MATLAB求解系统状态方程。
5、教案内容 (1) 系统的状态变量的概念 状态变量 系统在时刻0t 的状态是指一组数10()x t ,20()x t ,…, 0()n x t ,不仅要求这组数的个数是最少的,而且还可由10()x t ,20()x t ,…, 0()n x t 和0t t >时系统的输入得出0t t >时所有的状态或输出。这组变量10()x t ,20()x t ,…, 0()n x t 称为系统的状态变量。 状态空间分析法 状态空间分析法不仅适用与单输入单输出系统,而且适用于多输入多输出系统的分析,它可以描述系统的外部特性,也可以描述系统的内部特性,而且能够推广到时变系统和非线性系统。 (2)系统状态方程的一般形式 m 个输入p 个输出的N 阶连续时间系统的状态方程为N 个一阶微分方程组,可以用矩阵形式表示为 即 离散时间系统的状态方程具有与连续系统状态方程相似的形式,对于一个有m 个输入p 个输出的N 阶离散时间系统可以用N 个一阶差分方程描述,其状态方程和输出方程的一般形式为 其中A ,B ,C ,D 为状态方程和输出方程的系数矩阵。
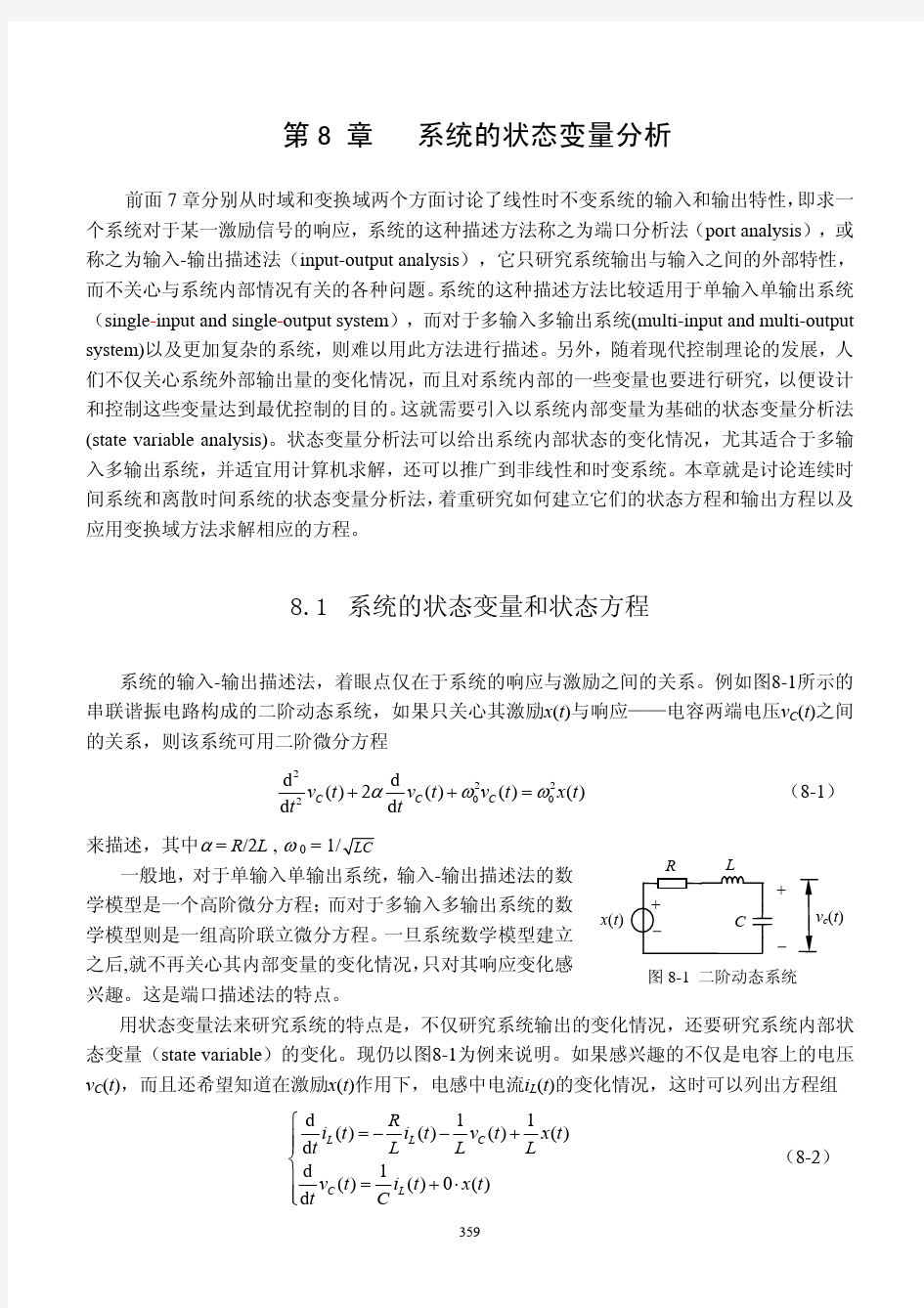
习题八 8-1对图8-1所示电路,列写出以)(t u C 、)(t i L 为状态变量x 1、x 2,以)(1t y 、)(2t y 为输出的状态方程和输出方程。 8-2 描述某连续系统的微分方程为 )(2)()(2)()(5)()1()1()2()3(t f t f t y t y t y t y +=+++ 写出该系统的状态方程和输出方程。 8-3 描述连续系统的微分方程组如下,写出系统的状态方程和输出方程。 (1))()()(2)(3)(211) 1(1)2(1t f t f t y t y t y +=++ )(3)()()(4)(212) 1(2)2(2t f t f t y t y t y -=++ (2))()()(12) 1(1t f t y t y =+ )()()()()(21) 1(2) 1(1) 2(2t f t y t y t y t y =+++ 8-4 以x 1、x 2、x 3为状态变量,写出图8-3所示系统的状态方程和输出方程。 8-5 如图8-7所示连续系统的框图。
(1)写出以x 1、x 2为状态变量的状态方程和输出方程。 (2)为使该系统稳定,常数a ,b 应满足什么条件? 8-6 描述某连续系统的系统函数为 12 492)(2 2+++=s s s s s H 画出其直接形式的信号流图,写出相应的状态方程和输出方程。 8-7 某离散系统的信号流图如图8-13所示。写出以x 1(k )、x 2(k )为状态变量的状态方程和输出方程。 8-8 如图8-14所示离散系统,状态变量x 1、x 2、x 3如图8-14所示。列出系统的状态方程和输出方程。
第八章 控制系统的状态空间分析 一、状态空间的基本概念 1. 状态 反应系统运行状况,并可用一个确定系统未来行为的信息集合。 2. 状态变量 确定系统状态的一组独立(数目最少的)变量,如果给定了0t t =时刻 这组变量的值())()() (00201t x t x t x n Λ 和0t t ≥时输入的时间函数)(t u ,则系 统在0t t ≥任何时刻())()() (21t x t x t x n Λ 的行为就可完全确定。 3. 状态向量 以状态变量为元素构成的向量,即[])()()()(21t x t x t x t x n Λ =。 4. 状态空间 以状态变量())()() (21t x t x t x n Λ 为坐标的n 维空间。系统在某时 刻的状态,可用状态空间上的点来表示。 5. 状态方程 描述状态变量,输入变量之间关系的一阶微分方程组。 6. 输出方程 描述输出变量与状态变量、输入变量间函数关系的代数方程。 二、状态空间描述(状态空间表达式) 1. 状态方程与输出方程合起来称为状态空间描述或状态空间表达式,线性定常系统状 态空间描述一般用矩阵形式表示,对于线性定常连续系统有 ? ? ?+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x & (8-1) 对于线性定常离散系统有 ?? ?+=+=+) ()()() ()()1(k Du k Cx k y k Hu k Gx k x (8-2) 2. 状态空间描述的建立:系统的状态空间描述可以由系统的微分方程,结构图(方框 图),状态变量图、传递函数或脉冲传递函数(Z 传递函数)等其它形式的数学模型导出。 3. 状态空间描述的线性变换及规范化(标准型) 系统状态变量的选择不是唯一的,状态变量选择不同,状态空间描述也不一样。利用线性变换可将系统的矩阵A (见式8-1)规范化为四种标准型:能控标准型、能观标准型、对角标准型、约当标准型。
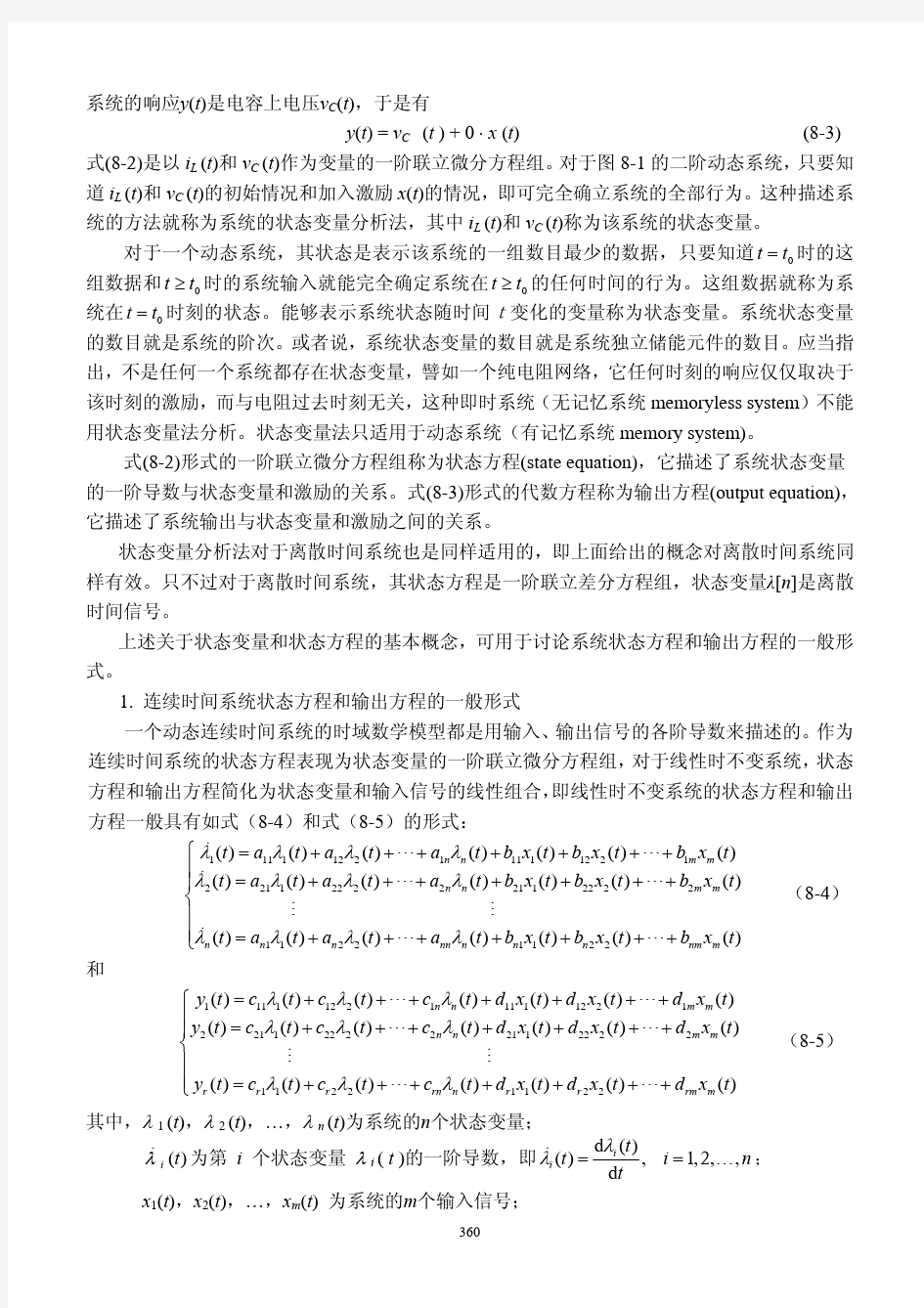
第2章 “控制系统的状态空间描述”习题解答 系统的结构如图所示。以图中所标记的1x 、2x 、3x 作为状态变量,推导其状态空间表达式。其中,u 、y 分别为系统的输入、输出,1α、2α、3α均为标量。 3 x 2 x 图系统结构图 解 图给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器的输出即为状态变量,这种图形称为系统状态变量图。状态变量图即描述了系统状态变量之间的关系,又说明了状态变量的物理意义。由状态变量图可直接求得系统的状态空间表达式。 着眼于求和点①、②、③,则有 ①:2111x x x +=α& ②: 3222x x x +=α&③:u x x +=333α& 输出y 为1y x du =+,得 1112223331000100 1x a x x a x u x a x ?? ?????? ????????=+???????????????????????? &&& []123100x y x du x ?? ??=+?? ???? 已知系统的微分方程 (1) u y y y y 354=+++&&&&&& ;(2) u u y y -=+&&&&&&32; (3) u u y y y y 75532+=+++&&&&&&&&& 。试列写出它们的状态空间表达式。 (1) 解 选择状态变量1y x =,2y x =&,3y x =&&,则有:
1223 31231 543x x x x x x x x u y x =??=?? =---+??=?&&& 状态空间表达式为:[]112233123010000105413100x x x x u x x x y x x ????????????????=+????????????????---???????? ????=?????? &&& (2) 解 采用拉氏变换法求取状态空间表达式。对微分方程(2)在零初试条件 下取拉氏变换得: 3222332()3()()() 11()12 23()232 s Y s sY s s U s U s s Y s s U s s s s s +=---==++ 由公式、可直接求得系统状态空间表达式为 1122330100001031002x x x x u x x ?? ????????????????=+? ?????????????????????-?? ?? &&& 123110 2 2x y x x ?????? =- ?????????? (3) 解 采用拉氏变换法求取状态空间表达式。对微分方程(3)在零初试条件 下取拉氏变换得: 323()2()3()5()5()7()s Y s s Y s sY s Y s s U s U s +++=+