求解力矩平衡的方法
求解力矩平衡问题的一般思路
1、确定研究对象(有转动轴的物体)
2、受力分析(转动轴处除外)
3、列出力矩平衡方程求解。
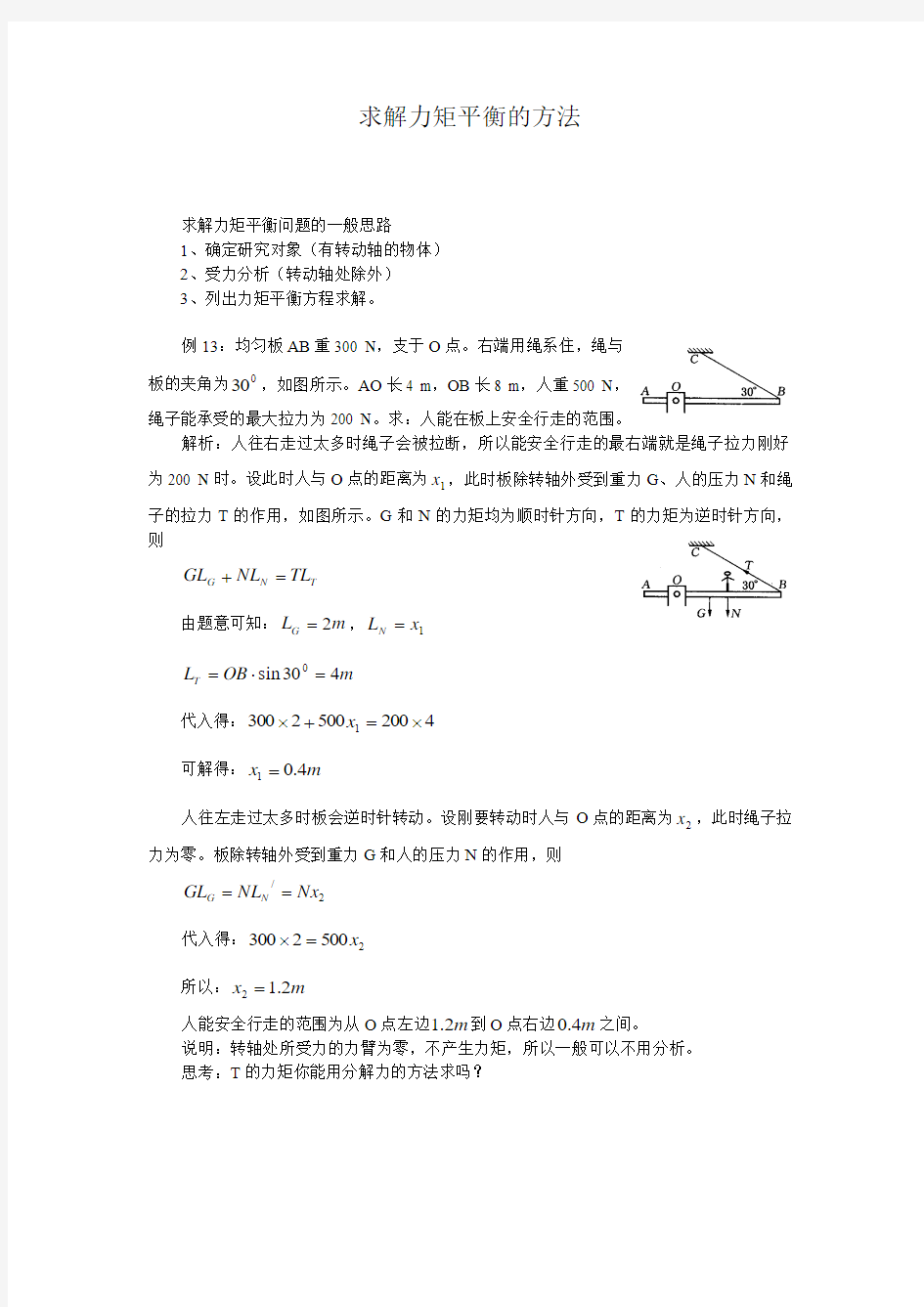
例13:均匀板AB 重300 N ,支于O 点。右端用绳系住,绳与
板的夹角为0
30,如图所示。AO 长4 m ,OB 长8 m ,人重500 N ,
绳子能承受的最大拉力为200 N 。求:人能在板上安全行走的范围。
解析:人往右走过太多时绳子会被拉断,所以能安全行走的最右端就是绳子拉力刚好为200 N 时。设此时人与O 点的距离为1x ,此时板除转轴外受到重力G 、人的压力N 和绳子的拉力T 的作用,如图所示。G 和N 的力矩均为顺时针方向,T 的力矩为逆时针方向,则
T N G TL NL GL =+
由题意可知:m L G 2=,1x L N =
m OB L T 430sin 0=?=
代入得:420050023001?=+?x
可解得:m x 4.01=
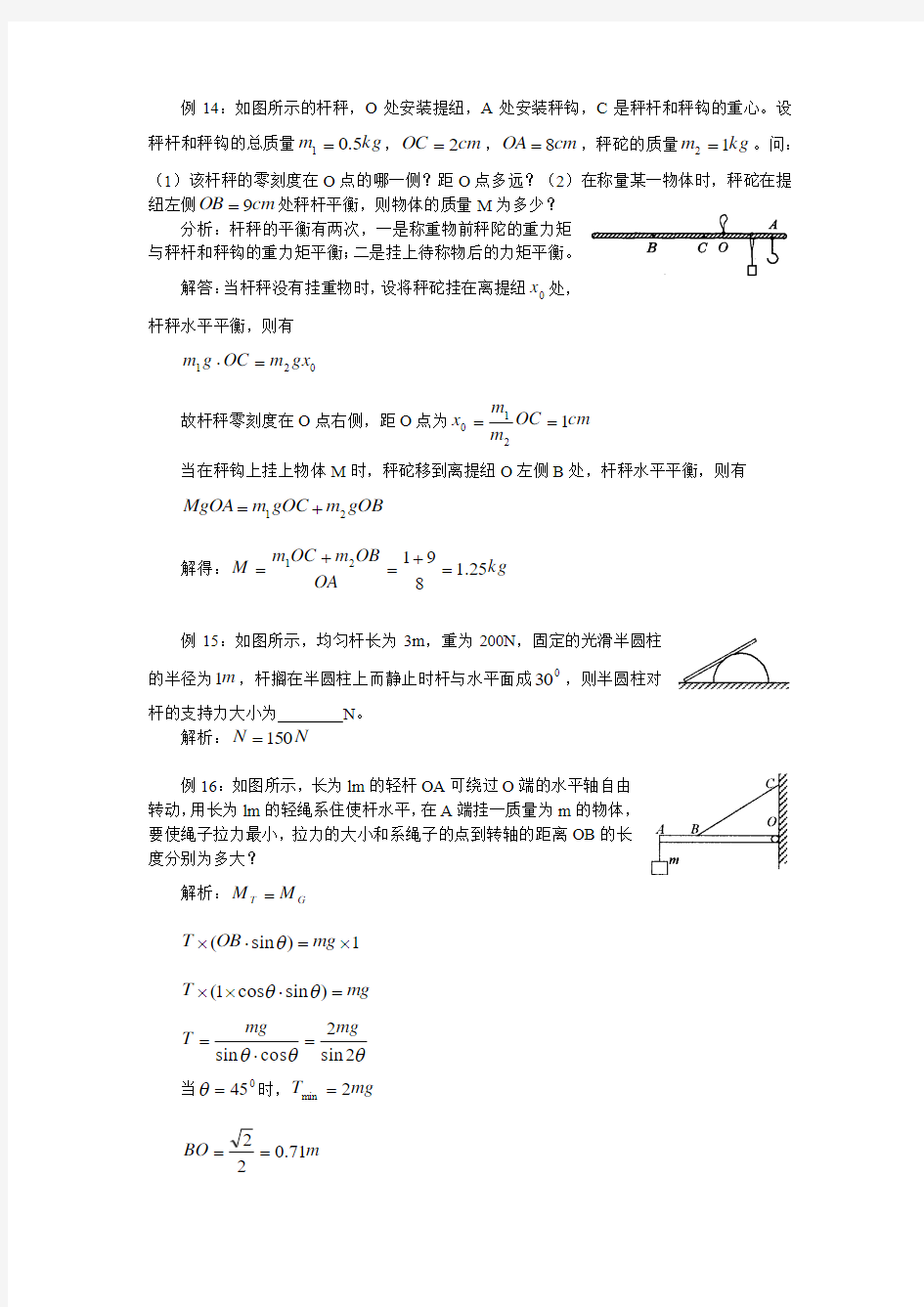
人往左走过太多时板会逆时针转动。设刚要转动时人与O 点的距离为2x ,此时绳子拉力为零。板除转轴外受到重力G 和人的压力N 的作用,则
2/
Nx NL GL N G ==
代入得:25002300x =?
所以:m x 2.12=
人能安全行走的范围为从O 点左边m 2.1到O 点右边m 4.0之间。
说明:转轴处所受力的力臂为零,不产生力矩,所以一般可以不用分析。 思考:T 的力矩你能用分解力的方法求吗?
例14:如图所示的杆秤,O 处安装提纽,A 处安装秤钩,C 是秤杆和秤钩的重心。设秤杆和秤钩的总质量kg m 5.01=,cm OC 2=,cm OA 8=,秤砣的质量kg m 12=。问:
(1)该杆秤的零刻度在O 点的哪一侧?距O 点多远?(2)在称量某一物体时,秤砣在提纽左侧cm OB 9=处秤杆平衡,则物体的质量M 为多少?
分析:杆秤的平衡有两次,一是称重物前秤陀的重力矩
与秤杆和秤钩的重力矩平衡;二是挂上待称物后的力矩平衡。
解答:当杆秤没有挂重物时,设将秤砣挂在离提纽0x 处,
杆秤水平平衡,则有
021gx m OC g m =?
故杆秤零刻度在O 点右侧,距O 点为cm OC m m x 12
10== 当在秤钩上挂上物体M 时,秤砣移到离提纽O 左侧B 处,杆秤水平平衡,则有 gOB m gOC m MgOA 21+= 解得:kg OA OB m OC m M 25.18
9121=+=+=
例15:如图所示,均匀杆长为3m ,重为200N ,固定的光滑半圆柱
的半径为m 1,杆搁在半圆柱上而静止时杆与水平面成0
30,则半圆柱对
杆的支持力大小为 N 。
解析:N N 150=
例16:如图所示,长为lm 的轻杆OA 可绕过O 端的水平轴自由
转动,用长为lm 的轻绳系住使杆水平,在A 端挂一质量为m 的物体,
要使绳子拉力最小,拉力的大小和系绳子的点到转轴的距离OB 的长
度分别为多大?
解析:G T M M = 1)sin (?=??mg OB T θ
mg T =???)sin cos 1(θθ
θ
θθ2sin 2cos sin mg mg T =?= 当045=θ时,mg T 2m in =
m BO 71.02
2==
例17:如图所示,均匀杆OB 每米重30N ,距支点O 处挂
一个重为120牛的重物C ,在杆的另一端B 处施加一个竖直向
上的力F ,则当杆为多长时,使杆处于水平平衡状态的力F 取
值最小?力F 的最小值为多少(m OA 5.0=)?
解析:设杆长为l
l l F l F l l 15602305.0120+=??=?
+?≥6015602=? 当N F m l l l
6021560m in ==?=时,时,
例18:如图所示,均匀杆AB 重为100N ,均匀杆CD 重
为10N ,下端均铰于水平地面上,AB 杆的上端恰搁在CD 杆
的上端,两杆与水平地面间的夹角分别为030和0
60,求:AB
对CD 的压力和摩擦力的大小。
解析:N 325,N 5.2
例19:如图所示,一正方形框架的边长为L ,重为G ,以一条水
平边为转轴,可在竖直平面内自由转动。现用一水平力拉框架的另一
水平边,使框架平面与竖直平面成α角而静止,求此力的大小。
解析一:把立体图先改画成从左前方看去的视图,如图所示。框架
受到重力G 和拉力F 作用,则 ααcos sin 2
FL L G =? αGtg F 2
1= 解析二:把框架分成四根边来考虑,一根边的重力过转轴,不产生力矩,则
αααcos sin 2
42sin 4FL L G L G =??+ 结果仍为αGtg F 2
1= 说明:由本题可见,求重力的力矩时,可认为一个重力作用在总重心上,也可以分成几部分重力分别求力矩后再求它们的代数和。
例20:如图所示,质量不计的杆B O
1和A O 2,长度均为
l ,1O 和2O 为一光滑的固定转轴,A 处有一凸起物搁在B
O 1的中点,B 处用绳系在A O 2的中点,此时两杆便组合成一根长杆。今在B O 1上的C (C 为AB 的中点)悬挂一重为G 的物体,则A 处受到的支持力大小为 ,B 处绳的拉力大小为 。
解析:因为A O 2和B O 1杆各自有转
轴,因此应该用隔离法隔离两杆,在分析
每根杆的受力的基础上,应用0=∑M 。
对每根杆列式求解。
解答:如图(a )所示,先分析A O 2杆,
除2O 点外,它受到B 处绳的拉力B F 和A 处的支持力A F 作用。由0=∑M 有,
2
l F l F B A =,解得2B A F F =。 如图(b )所示,再选B O 1和重物为研究对象,除1O 处外,它受到重力G 、B 处绳的拉力B F 和A 处凸起物的压力A F 作用。由又0=∑M 有,2
43l F l G l F A B +=,解得 2
G F A =
,G F B = 练习:如图所示,均匀的直角三角板ABC 重为20N ,在C 点有
固定的转动轴,A 点用竖直的线AD 拉住,当BC 处于水平平衡位置时AD 线上的拉力大小为F 。后将一块凹槽口朝下、重为4N 的木块卡在斜边AC 上,木块恰能沿斜边AC 匀速下滑,当木块经过AC 的中点时细线的拉力大小变为F+△F ,则下述正确的是 ( )
A .F=10N B.F>10N
C.△F=2N
D.△F=4N
B 、C
力矩和力矩平衡 一.内容黄金组. 1.了解转动平衡的概念,理解力臂和力矩的概念。 2.理解有固定转动轴物体平衡的条件 3.会用力矩平衡条件分析问题和解决问题 二.要点大揭秘 1.转动平衡:有转动轴的物体在力的作用下,处于静止或匀速转动状态。 明确转轴很重要: 大多数情况下物体的转轴是容易明确的,但在有的情况下则需要自己来确定转轴的位置。如:一根长木棒置于水平地面上,它的两个端点为AB,现给B端加一个竖直向上的外力使杆刚好离开 地面,求力F的大小。在这一问题中,过A点垂直于杆的水平直线是杆的转轴。象这样,在解决问 题之前,首先要通过分析来确定转轴的问题很多,只有明确转轴,才能计算力矩,进而利用力矩 平衡条件。 2.力矩: 力臂:转动轴到力的作用线的垂直距离。 力矩:力和力臂的乘积。 计算公式:M=FL 单位:Nm 效果:可以使物体转动 (1)力对物体的转动效果 力使物体转动的效果不仅跟力的大小有关,还跟力臂有关,即力对物体的转动效果决定于力矩。①当臂等于零时,不论作用力多么大,对物体都不会产生转动作用。②当作用力与转动轴平行时,不会对物体产生转动作用,计算力矩,关键是找力臂。需注意力臂是转动轴到力的作用线的距离,而不是转动轴到力的作用点的距离。 (2)大小一定的力有最大力矩的条件: ①力作用在离转动轴最远的点上; ②力的方向垂直于力作用点与转轴的连线。 (3)力矩的计算: ①先求出力的力臂,再由定义求力矩M=FL 如图中,力F的力臂为L F=Lsinθ 力矩M=F?L sinθ ②先把力沿平行于杆和垂直于杆的两个方向分解,平 行于杆的分力对杆无转动效果,力矩为零;平行于杆的分力的 力矩为该分力的大小与杆长的乘积。 如图中,力F的力矩就等于其分力F1产生的力矩,M =F sinθ?L 两种方法不同,但求出的结果是一样的,对具体的问题选择恰当的方法会简化解题过程。 3.力矩平衡条件: 力矩的代数和为零或所有使物体向顺时针方向转动的力矩之和等于所有使物体向逆时针方向转动的力矩之和。 ∑M=0或∑M 顺=∑M 逆 F F2
第二章平面机构的平衡 2.1概述 由上一章的分析可知:高速机械和重型机械中,运动构件要产生较大的惯性力和惯性力矩;机构传给机座一个摆动力和一个摆动力矩。它们对机械的运转造成多方面的不利影响。要克服这些不利影响就要进行机构的平衡。机构平衡问题,在本质上是一种以动态静力分析为基础的动力学综合,或动力学设计。 一、机构的平衡 机构运转中产生的惯性载荷会造成如下的危害: 1)惯性力(力矩)的大小和方向是周期性变化的,因而通过构件和运动副传到机座上的摆动力(力矩)的大小和方向也是周期性变化的。周期性变化的力和力矩会引起机构在机座上的振动,使机械的精度和工作可靠性下降,并产生噪声;引起共振时还会导致机械的损坏,甚至危及人身和厂房的安全。 2)惯性力(力矩)的周期性变化加剧了作用于驱动构件上的平衡力矩的波动,在传动系统中产生冲击载荷,或造成系统的扭转振动。 3)惯性载荷在构件中引起附加的动应力,影响构件的强度;在运动副中引起附加动反力,加剧磨损并降低机械的效率。 因而,为了适应机械高速化和精密化的发展趋势,就必须减小惯性力的不良影响,必须研究机械的平衡问题。在机械原理课程中曾研究了绕固定轴线回转的构件的平衡,本章则研究机构的平衡。在大多数机构中,除驱动构件等速回转外,其余构件均往复运动或平面一般运动,惯性载荷是普遍存在的。当驱动构件等速回转时,各构件的惯性力和惯性力矩均与驱动构件转速的平方成正比。当转速升高时,惯性载荷的影响是很大的。 所谓平衡,就是采用构件质量再分配等手段完全地或部分地消除惯性载荷。平衡,是在机构的运动设计完成之后进行的一种动力学设计。虽然由于惯性载荷的作用会引起机械在机座上的振动,但是,在进行平衡分析时,一般并不列出振动的微分方程。也就是说,并不进行振动的频率分析和响应分析,而仅着眼于全部消除或部分消除引起振动的激振力。 在平衡设计中进行惯性力的分析时,均假定驱动构件作某种理想运动(如假定作等速回转运动)。因而,用绪论中介绍过的四种不同水平的分析方法来衡量,平衡在本质上是一种以动态静力分析为基础的动力学综合。 二、平衡的种类和方法 针对上述的惯性载荷造成的三种危害,机构的平衡也有三种: 1)机构在机座上的平衡:机构在机座上的平衡是将各运动构件视为一个整体系统进行的平衡,目标是消除或部分消除摆动力和摆动力矩,从而减轻机构整体在机座上的振动。这类平衡问题是长期以来人们注意的重点,本章后续各节主要介绍这一类平衡问题。如无特别指明,下文中凡提及平衡即指机构在机座上的平衡。 2)机构输入转矩的平衡:用第二章的动态静力分析方法可计算出为维持主动构件等速回转而应施加于主动构件上的平衡力矩。这一平衡力矩是随机构的位置而变化的。高速机构中惯性载荷成为载荷中的主要成分,由于作周期性非匀速运动的构件的惯性力和惯性力矩是正负交变的,便使平衡力矩的波动更为剧烈。为降低这一波动的程度需进行机构输入转矩的平衡。
郑梁梅高级中学高一物理竞赛辅导讲义 第三讲:力矩、定轴转动物体的平衡条件、重心 【知识要点】 (一)力臂:从转动轴到力的作用线的垂直距离叫力臂。 (二)力矩:力和力臂的乘积叫力对转动轴的力矩。记为M=FL ,单位“牛·米”。一般规定逆时针方向转动为正方向,顺时针方向转动为负方向。 (三)有固定转轴物体的平衡条件 作用在物体上各力对转轴的力矩的代数和为零或逆时针方向力矩总是与顺时针方向力矩相等。即ΣM=0,或ΣM 逆=ΣM 顺。 (四)重心:物体所受重力的作用点叫重心。 计算重心位置的方法: 1、同向平行力的合成法:各分力对合力作用点合力矩为零,则合力作用点为重心。 2、割补法:把几何形状不规则的质量分布均匀的物体分割或填补成形状规则的物体,再由同向(或反向)平行力合成法求重心位置。 3、公式法:如图所示,在平面直角坐标系中,质量为m 1和m 2的A 、B 两质点坐标分别为A (x 1,y 1),B (x 2,y 2)则由两物体共同组成的整体的重心坐标为: 212211m m x m x m x C ++= 212211m m y m y m y C ++= 一般情况下,较复杂集合体,可看成由多个质点组成的质点系, 其重心C 位置由如下公式求得: i i i C m x m x ∑∑= i i i C m y m y ∑∑= i i i C m z m z ∑∑= 本节内容常用方法有:①巧选转轴简化方程:选择未知量多,又不需求解结果的力线交点为轴,这些力的力矩为零,式子简化得多;②复杂的物体系平衡问题有时巧选对象:选整体分析,常常转化为力矩平衡问题求解;③无规则形状的物体重心位置计算常用方法是通过割补思想,结合平行力合成与分解的原则处理,或者助物体重心公式计算。 【典型例题】 【例题1】如图所示,光滑圆弧形环上套有两个质量不同的小球A 和B 两球之间连有弹簧,平衡时圆心O 与球所在位置的连线与竖直方向的夹角分别为α和β,求两球质量之比。 y y y 2α β A B O
一、初中物理杠杆平衡条件的应用问题 1.如图所示,轻质杠杆左侧用细绳挂着正方体甲,正方体甲放在水平放置的电子测力计上,右侧挂着重为1N 的钩码乙,O 为支点,正方体甲的边长为0.1m 。在杠杆水平平衡的条件下,当只改变动力臂l 1,电子测力计的示数T 随之改变,T- l 1的关系如图所示。则下列判断正确的是( ) A .阻力臂l 2为6cm B .正方体甲受到的重力为6N C .当动力臂l 1=2cm 时,左侧细绳对杠杆的拉力为2N D .当动力臂l 1=4cm 时,正方体甲对电子测力计的压强为100Pa 【答案】D 【解析】 【分析】 通过甲物体处于平衡条件的分析确定杠杆所受的拉力大小,再根据杠杆平衡条件结合图像上不同的点来解题。 【详解】 A .根据题意,甲始终处于静止状态,甲受到绳子的拉力,甲物体自身的重力,电子秤对甲物体的支持力 G F F =+支拉 物体拉杠杆的力和杠杆拉物体的力是一对相互作用力 2F F =拉 电子测力计对物体甲的支持力和物体甲对电子测力计的压力是一对相互作用力 F T =支 即 2F G T =- 根据杠杆的平衡条件 1122F L F L = 得 ()112F L G T L =- 根据图像可知当T 1=2N ,L 1=2cm ()21N 2cm 2N G L ?=-?
根据图像可知当T 1=1N ,L 1=4cm ()21N 4cm 1N G L ?=-? 解得L 2=2cm ,G =2N ,A 、B 选项错误; C .由图像可知,当L 1=2cm ,此时T 1=2N 213N 2N 1N F G T =-=-= 细绳对杠杆的拉力是1N ,C 选项错误; D .由图像可知,当L 1=4cm ,此时T 1=1N ,由公式 1N 100Pa 0.1m 0.1m F P S = ==? D 选项正确。 故答案选择D 。 2.工人师傅利用如图所示的两种方式,将重均为 400N 的货物从图示位置向上缓慢提升一 段距离.F 1、F 2始终沿竖直方向;图甲中 BO =2AO ,图乙中动滑轮重为 50N ,重物上升速度 为 0.02m/s .不计杠杆重、绳重和摩擦,则下列说法正确的是( ) A .甲方式 F 1由 150N 逐渐变大 B .乙方式 F 2的功率为 3W C .甲乙两种方式都省一半的力 D .乙方式中滑轮组的机械效率约为 88.9% 【答案】D 【解析】 【详解】 A .由图知道,重力即阻力的方向是竖直向下的,动力F 1 的方向也是竖直向下的,在提升重物的过程中,动力臂和阻力臂的比值是: 1221 L OB L OA == 所以,动力F 1 的大小始终不变,故A 错误; BC .由于在甲图中, OB =2OA ,即动力臂为阻力臂的2倍,由于不计摩擦及杠杆自重,所以,由杠杆平衡条件知道,动力为阻力的一半,即 111 400N 200N 22 F G ==?= 由图乙知道,承担物重是绳子的段数是n =3,不计绳重和摩擦,则
基于力矩平衡原理的物体重量重心测量 系统的研究及使用 中航电测仪器股份有限公司贾恒信李明波吕江涛 【内容摘要】本文通过对基于力矩平衡原理物体的重量重心测量系统的组成、原理详细的阐述,并对影响系统精度的因素进行了分析,根据力矩平衡原理的要求以及实际使用中存在的问题,给出了在使用中注意的事项和解决问题的方法和措施,为基于力矩平衡原理的物体重量重心测量系统使用领域的进一步拓展具有借鉴作用。 关键词:力矩平衡、重心、测量系统、测力传感器、使用 一、概述: 确定物体重量及重心的位置在工程上有着非常重要的意义,特别是在有安全要求的物体使用上尤显其重要性。如在飞机的飞行过程中、飞机重心必须限定在一个相当小的设计要求范围内,尤其是飞机的起飞和降落飞机重心的准确度直接影响着飞机的飞行安全;在汽车、火车的机车的重心关系到汽车、机车的牵引的运动性、运行的稳定性和转向的安全性;在机载各种机器设备的研制过程中,各种机器设备重量重心的确定是设计减震系统必不可少的一项工作;在机车、船舶、坦克等重型工程装备中,重心的检测和测定也是一项必不可少的步骤。由于重心的测量原理已经特别明确,针对不同的被测对象可以采用不同的测量方法;目前测量物体重心坐标方法有引力法、悬挂法、力矩平衡法、质量矩守恒法等多种,对于重量较大的物体重心测量,力矩平衡法是现在最常用的一种,利用力矩平衡原理测量物体重量及重心的方式目前有三种方式:称重平台式、悬挂式、千斤顶式;无论何种方式都是通过3点、4点或多支撑点的测力传感器感知力值的大小,再通过采集系统对传感器感知力值数据信号的采集,通过计算机软件对该信号的解算,便得到
物体重心的位置值,这便是本文将要介绍的基于力矩平衡原理的物体重量重心测量系统; 二、系统的基本原理和组成 1.系统组成和原理 系统由多套测力传感器(或称重平台)、一套称重仪表箱(含有数字模块、电源模块、RS232连接器等)、一台笔记本电脑(含相应的软件)等部件组成。 从各测力传感器(或称重平台)感知的力信号通过数字模块进行采集、A/D转换、处理,然后通过信号线和笔记本电脑连接,由笔记本电脑中的相关软件对仪表采集传输的信号进行处理解算得到物体重心数据。系统组成原理图见图1; 图1 系统组成原理图 2.系统的支撑操作组合方式 利用力矩平衡原理测量物体重量及重心的方式目前有称重平台式、悬挂式、千斤顶式三种,因系统支撑操作不同而有多种组合,其一,单一的称重平台式是在每一测力的支撑点下放置一
1.力矩 力的三要素是大小、方向和作用点。由作用点和力的方向所确定的射线称为力的作用线。力作用于物体,常能使物体发生转动,这时外力的作用效果不仅取决于外力的大小和方向,而且取决于外力作用线与轴的距离——力臂(d )。 力与力臂的乘积称为力矩,记为M ,则M Fd =,如图1,O 为垂直于纸面的固定轴,力F 在纸面内。 力矩是改变物体转动状态的原因。力的作用线与轴平行时,此力对物体绕该轴转动没有作用。若力F 不在与轴垂直的平面内,可先将力分解为垂直于轴的分 量F ⊥和平行于轴的分量F ∥,F ∥对转动不起作用,这时力F 的力矩为M F d ⊥=。通常规定 绕逆时方向转动的力矩为正。当物体受到多个力作用时,物体所受的总力矩等于各个力产生力矩的代数和。 某个力的力矩定义为力臂与力的叉乘,即M r F =? 力矩M 是矢量,其方向通常按右手螺旋定则确定:力矩M 同时垂直于力臂r 与力F ,当右手螺旋从r 的方向转到F 的方向时大拇指的方向即为M 的方向. 叉乘a ×b =c c 称“矢量的叉积”,它是一个新的矢量。叉积的大小:c =absinα,其中α为a 和b 的夹角。意义:c 的大小对应由a 和b 作成的平行四边形的面积。叉积的方向:垂直a 和b 确定的平面,并由右手螺旋定则确定方向,如图所示。显然,a ×b ≠b ×a ,但有:a ×b =-b ×a 【注意】转轴可以随意选取,力矩计算的核心技巧是巧选转轴,总的原则是 未知力作用线不能通过转轴,其次是其他未知力作用线尽量过轴。 通常不考虑形变的物体都称作刚体, 刚体平衡必须满足两个条件其 一:力的矢量和等于零,即0Fi ∑= 这就保证了刚体没有平动. 其二:作用于刚体的力对于矩心O 的合力矩也为零,即0Mi ∑= 知识点睛 10.1力矩平衡 第10讲 力矩平衡
杠杆平衡条件的应用 【练一练】(1)密度均匀的直尺AB 放在水平桌面上,尺子 B 伸出桌面的部分OB 是全尺长的三分之一,当B 端挂5N 的 重物P 是,直尺的A 端刚刚开始翘起,如图所示,则此直 尺受到的重力是多少? (2)小兰和爸爸玩跷跷板,已知小兰和爸爸的体重分别是 400N 和800N ,小兰站在距离支点2m 的一侧,则爸爸站在距 离支点多远处才能使木板水平平衡? (3)小明的家在农村,暑假期间他会帮家里干一些力所能及的农活。一天傍晚他去晒场把稻谷挑回家。扁担长1.61m ,前筐重200N ,后筐重150N ,问小明要平衡地挑起这担稻谷,
他的肩膀距离扁担的前端应该是多少cm ? (4)大李和小李用长是1.8m的扁担抬重600N的重物,若大李要承担三分之二的重量,则重物应挂在距大李多远处? 小李大李 【练一练】(1)下列杠杆 ①羊角锤②扳手③筷子④钳子⑤理发剪刀⑥铁皮剪刀⑦镊子⑧笤帚⑨试管夹夹住试管⑩捏开试管夹(11)铡刀(12)汽车的脚踏板(13)起重机的起重臂(14)用前臂托起重物 省力杠杆有 费力杠杆有(只填序号) (2)如图是家用脚踏式垃圾桶的结构图,F为装垃圾时开盖 用的脚踏板.该装置中,属杠杆部分的有(填字母) , 省力杠杆是 .
【练一练】(1)如图,轻质杠杆上挂着7个相同的钩码, 时增挂一个相同的钩码, 则杠杆将会( ) A .左端下降 B .右端下降 C .杠杆仍然平衡 D .条件不足,无法判断 (2)不等臂杠杆在动力和阻力作用下,已处于平衡状态, 采用下列方法不能使杠杆保持平衡的是( ) A .在杠杆上再施加一个力,使这个力的作用线通过杠杆的中点,但不通过支点 B .在杠杆上再施加一个力,使这个力的作用线通过杠杆的支点 C .使动力和阻力同时减小到原来的一半 D .使力臂同时变为原来的2倍 (3)如图,体积相同的铁块和铝块挂在杠杆的两端, O 杠杆处于平衡状态,现将铁块和铝块同时浸没到水中, 杠杆将( ) A .左端下降 B .右端下降 C .杠杆仍然平衡 D .条件不足,无法判断
力矩和力矩平衡 一:力矩的概念 力矩是改变转动物体的运动状态变化的物理量,门、窗等转动物体从静止状态变为转动状态或从转动状态变为静止状态时,必须受到力的作用。但是,我们若将力作用在门、窗的转轴上,则无论施加多大的力都不会改变其转动状态,可见物体的转动运动状态的变化不仅与力的大小有关,还与受力的方向、力的作用点有关。力的作用点离转轴越远,力的方向与转轴所在平面越趋于垂直,力使转动物体运动状态变化得就越明显。在物理学中力对转动物体运动状态变化的影响,用力矩这个物理量来表示,因此,力矩被定义为力与力臂的乘积。力矩概括了影响转动物体运动状态变化的所有规律,力矩是改变转动物体运动状态的物理量。 力矩是表示力对物体产生转动作用的物理量,是物体转动转动状态改变的原因。它等于力和力臂的乘积。表达式为:M=FL,其中力臂L是转动轴到F的力线的(垂直)距离。单位:Nm 效果:可以改变转动物体运动状态。 转轴: 物体转动时,物体上的各点都沿圆周运动,圆周的中心在同一条直线上,这条直线就叫转轴。 特点:1,体中始终保持不动的直线就是转轴。 2,体上轴以外的质元绕轴转动,转动平面与轴垂直且为圆周, 圆心在轴上。 3,转轴相平行的线上各质元的运动情况完全一样。 大多数情况下物体的转轴是容易明确的,但在有的情况下则需要自己来确定转轴的位置。如:一根长木棒置于水平地面上,它的两个端点为AB,现给B端加一个竖直向上的外力使杆刚好离开地面,求力F的大小。在这一问题中,过A点垂直于杆的水平直线是杆的转轴。象这样,在解决问题之前,首先要通过分析来确定转轴的问题很多,只有明确转轴,才能计算力矩,进而利用力矩平衡条件。
高中物理竞赛辅导资料四:力、力矩、平衡 (一)重力 重力大小G=mg,方向竖直向下。一般来说,重力是万有引力的一个分力,静止在地球表面的物体,其万有引力的另一个分力充当物体随地球自转的向心力,但向心力极小。 (二)弹力 当物体在外力作用下发生形变时,其内部产生的反抗外力作用而企图恢复形变的力叫弹力。胡克弹力的大小由F=k△x确定。 a)当劲度系数分别为k1、k2…的若干弹簧串联使用时,等效弹簧的劲度系数为: b)当劲度系数分别为k1、k2…的若干弹簧并联使用时,等效弹簧的劲度系数为: 例一:一根重力不计的弹簧一端固定,挂上重100N的物体时伸长了30cm,若把弹簧减去2/3,再把100N物体挂在弹簧下端,则弹簧伸长了多少?劲度系数变为多少? (三)摩擦力 1、摩擦力方向 一个物体在另一物体表面有相对运动或相对运动趋势时,产生的阻碍物体相对运动或相对运动趋势的力叫摩擦力。方向沿接触面的切线且阻碍物体间相对运动或相对运动趋势。 2、滑动摩擦力的大小由公式f=μN计算。 3、静摩擦力的大小是可变化的,无特定计算式,一般根据物体运动性质和受力情况分析求解。其大小范围在0<f≤f m之间。 (四)力矩 力和力臂的乘积叫力对转动轴的力矩。记为M=FL,单位“牛·米”。一般规定逆时针方向转动为正方向,顺时针方向转动为负方向。 力臂:从转动轴到力的作用线的垂直距离叫力臂 例二:.如图所示是一根弯成直角的杆,它可绕O点转动.杆的OA段 长30cm,AB段长40cm.现用F=10N的力作用在杆上,要使力F对轴O 逆时针方向的力矩最大,F应怎样作用在杆上?画出示意图,并求出力F 的最大力矩.
难点3: 力矩平衡条件及应用 力矩平衡以其广泛的实用性,再次被考纲列为考查的内容,且以此知识点为素材的高考命题屡次再现于近几年高考上海卷及全国理综卷中.其难点分布于:(1)从实际背景中构建有固定转动轴的物理模型.(2)灵活恰当地选取固定转动轴.(3)将转动模型从相关系统(连结体)中隔离分析等。 ●难点考场 1.(★★★★)如图3-1所示,一根长为L 的轻杆OA ,可绕水平轴O 在竖直平面内自由转动,左端A 挂一质量为m 的物体,从杆上一点B 系一不可伸长的细绳,将绳跨过光滑的钉子C 与弹簧K 连接,弹簧右端固定,这时轻杆在水平位置保持平衡,弹簧处于伸长状态,已知OB =OC = 3 2 L ,弹簧伸长量恰等于BC ,由此可知,弹簧的劲度系数等于______. 2.(★★★★★)(1997年上海,6)如图3-2所示是一种手控制动器,a 是一个转动着的轮子,b 是摩擦制动片,c 是杠杆,O 是其固定转动轴.手在A 点施加一个作用力F 时,b 将压紧轮子,使轮子制动.若使轮子制动所需的力矩是一定的,则下列说法正确的是 A.轮a 逆时针转动时,所需的力F 较小 B.轮a 顺时针转动时,所需的力F 较小 C.无论逆时针还是顺时针转动,所需的力F 相同 D.无法比较F 的大小 ●案例探究 [例1](★★★★★)如图3-3所示,长为L 质量为m 的均匀木棒,上端用绞链固定在物体上,另一端放在动摩擦因数为μ的小车平台上,小车置于光滑平面上,棒与平台的夹角为θ,当: (1)小车静止时,求棒的下端受小车的支持力; (2)小车向左运动时,求棒的下端受小车的支持力; (3)小车向右运动时,求棒的下端受小车的支持力. 命题意图:题目出示的物理情境,来考查考生受力分析能力及力矩平衡条件的应用能力.B 级要求. 错解分析:对“车的不同运动状态使棒所受摩擦力大小方向的变化”理解分析不透,从而错列力矩平衡方程. 解题方法与技巧:(1)取棒为研究对象.选绞链处为固定转动轴,除转动轴对棒的作用力外,棒的受力情况如图3-4所示,由力矩平衡条件知: F N 1Lc os θ=mg 2 L c os θF N 1=21mg 图3—4 图3—5 (2)小车向左运动,棒另外受到一个水平向左的摩擦力F 1作用,受力如图3-5所示,则有2N F Lc os θ=mg 2 L cos θ+μ2N F L sin θ 所以2N F = ) tan 1(2θμ-mg ,则2N F >1N F (3)小车向右运动时,棒受到向右的摩擦力F 2作用,受力如图3-6所示,有 3N F L cos θ+μ3N F L sin θ=mg 2 L cos θ 解得3N F = ) tan 1(2θμ+mg 所以3N F <1N F 本题的关键点是取棒作为研究对象,由于车有不同的运动方向,故棒所受摩擦力的方向也不同,从而导致弹力的不同. [例2](★★★★★)(2002年上海卷)如图3-7所示,一自行车上连接脚踏板的连杆长R 1,由脚踏板带动半径为r 1的大齿盘,通过链条与半径为r 2的后轮齿盘连接,带动半径为R 2的后轮转动. 图3-1 图3-2 图3-3 图3—6
平衡、力距 「力學」是一門研究物體的運動規律及其應用的學科,有的將其獨立成科,有的將其歸類為物理學的一個分支。查實,古人通過對天文、自然現象的觀察及機械的製作早已對力學有研究,天文、數學及力學基本上不可分割,眾多的「數學大師」如阿基米德(Archimedes)、拉普拉斯(Laplace)、拉格朗日(Lagrange)、牛頓(Newton)、帕斯卡(Pascal)與及較近代的龐加萊(Poincar′e ),介紹他們的時候,除了稱他們為數學家外,亦有稱他們為天文學家、物理學家或力學家。 以牛頓運動定律為基礎的力學稱為「牛頓力學」或「經典力學」,而通常說的「力學」,一般就是指「牛頓力學」或「經典力學」。 「力學」亦有很多分支,按研究問題的性質,可分為:靜力學(statics)、運動學(kinematics)和動力學(dynamics)1。 本欄的主要討論對象為靜力學,討論物體在外界的作用下,機械運動狀態保持不變(平衡)的條件。一件物件能夠保持平衡(equilibrium)的條件: 1.它所受外力的矢量和(vector sum)為零; 2.這些外力對任何軸所產生的力矩(moment of force)互相抵 消。 力矩與槓杆原理 力矩是量度「力」使物體產生轉動作用的量,亦是引致物體轉動狀態改變的原因。如圖,在B 點的力F 作用到A 點的力距M 為F 的大小與力臂d 的乘積,即 M =F d 其中「力臂」是指從轉軸到力的垂直距離。 力矩愈大,使物體轉動的作用愈明顯,如使用扳手擰螺絲 帽,愈長手柄的扳手,因力臂可以更長,用相同的力,會產 生更大的力距,會更易扭動螺絲帽。如圖,槓杆的「支點」為P , 左右懸掛了物件A 與B ,槓杆 平行的條件為 F 1d 1=F 2d 2 這條件亦稱為「槓 杆原理」。 F 12d d P 1礙于筆者對物理學的認知非常少,未能道出Dynamics 和Kinetics 的分別 1
杠杆的平衡条件及其应用 1、如图所示,绳子OO′悬吊着质量忽略不计的杆,在杆的a点挂上重物G,在O右侧某点b处挂上钩码。如果a到O的距离不变,b点挂的钩码个数(各个钩码质量相同)和b到O的距离的关系是图中哪一幅() A. B、C、. D、 N G O cm 方向将物体分成左右两部分,则() 时,直尺A端刚刚开始翘起,如图所示,则此直尺的重为______N. m N O F
(3)若测力计量程为25N,则应控制x在什么范围内变化? 且AO <BO ,此时杠杆平衡在水平位置. 若在G 1 和G 2 下分别再加挂重为G 的重物,此时杠杆…( ) A .仍然平衡在水平位置 B .不再平衡, A 端下降 C .不再平衡, B 端下降 D .由于G 1 和G 2 的大小未知,无法判断其是否平衡 2、乒乓球、保龄球等表面都是光滑的,为什么高尔夫球的表面上布满小坑呢?经有关科学家研究发现:两个等大的球,一个表面布满小坑,另一个光滑,在空中高速飞行时,表面布满小坑的球受到的空气阻力较小。现将质量与体积均相等的两个小球A(表面布满小坑)与B(表面光滑)分别利用细绳悬挂在等臂杠杆的两端,使杠杆水平平衡,如图所示。当从两球正下方同时以相同速度(足够大)的风对准它们竖直向上吹时,则以下的说法中正确的是() A. 杠杆左端下降 B. 杠杆右端下降 C. 杠杆仍然在水平方向处于平衡状态 D. 无法判断杠杆的转动情况
3、 杠杆平衡条件的探究 1、小丽做“探究杠杆的平衡条件”的实验。 (1)当杠杆如图所示时,小丽应将平衡螺母向______移动,使杠杆在水平位置平衡.(选填“左”或“右”) (2)调节杠杆水平平衡后,小丽在杠杆的A点挂上2个钩码(每个钩码重1N,杠杆上相邻刻线距离相等),如图所示。若使杠杆恢复水平平衡状态,可以在______点挂上1个钩码;或者使用最大测量值为1N的弹簧测力计在______点沿着竖直向上的方向拉住杠杆。 2、在学习了杠杆的“支点、动力和阻力”三个要素后,某小组同学进行探究杠杆平衡条件的实验,实验装置如图所示。他们在杠杆的一侧挂上钩码,以钩码对杠杆的拉力为阻力,保持阻力大小、方向和作用点的位置不变,在杠杆的另一侧用力(视为动力)将杠杆拉到水平位置平衡。他们或改变动力作用点到支点的距离、或改变动力与杠杆的夹角(即动力的方向,已知θ<90°).当杠杆在水平位置平衡时,动力的大小如图中测力计所示。请仔细观察实验操作和测量结果,归纳得出初步结论。 ①分析比较图中(a)和(b)的实验过程及相关条件可知:在阻力大小、方向和作用点位置不变的情况下,杠杆平衡时,___; ②分析比较图中(a)和(c)的实验过程及相关条件可知:在阻力大小、方向和作用点位置不变的情况下,杠杆平衡时,___. 定滑轮和动滑轮的特点 1、如图所示,在用滑轮将同一物体沿相同水平地面匀速移动时,拉力分别为F甲、F乙、F丙、F 丁 , 比较它们的大小(不计滑轮重及滑轮与细绳间的摩擦),正确的是( ) A.F甲>F乙 B.F乙=F丙
力矩和力矩平衡 一. 内容黄金组. 1.了解转动平衡的概念,理解力臂和力矩的概念。 2.理解有固定转动轴物体平衡的条件 3.会用力矩平衡条件分析问题和解决问题 二. 要点大揭秘 1. 转动平衡:有转动轴的物体在力的作用下,处于静止或匀速转动状态。 明确转轴很重要: 大多数情况下物体的转轴是容易明确的,但在有的情况下则需要自己来确定转轴的位置。如:一根长木棒置于水平地面上,它的两个端点为AB ,现给B 端加一个竖直向上的外力使杆刚好离开地面,求力F 的大小。在这一问题中,过A 点垂直于杆的水平直线是杆的转轴。象这样,在解决问题之前,首先要通过分析来确定转轴的问题很多,只有明确转轴,才能计算力矩,进而利用力矩平衡条件。 2. 力矩: 力臂:转动轴到力的作用线的垂直距离。 力矩:力和力臂的乘积。 计算公式:M =FL 单位: Nm 效果:可以使物体转动 (1)力对物体的转动效果 力使物体转动的效果不仅跟力的大小有关,还跟力臂有关,即力对物体的转动效果决定于力 矩。①当臂等于零时,不论作用力多么大,对物体都不会产生转动作用。②当作用力与转动轴平行时,不会对物体产生转动作用,计算力矩,关键是找力臂。需注意力臂是转动轴到力的作用线的距离,而不是转动轴到力的作用点的距离。 (2)大小一定的力有最大力矩的条件: ①力作用在离转动轴最远的点上; ②力的方向垂直于力作用点与转轴的连线。 (3)力矩的计算: ①先求出力的力臂,再由定义求力矩M =FL 如图中,力F 的力臂为L F =Lsin θ 力矩M =F ?L sin θ ②先把力沿平行于杆和垂直于杆的两个方向分解,平 行于杆的分力对杆无转动效果,力矩为零;平行于杆的分力的力矩为该分力的大小与杆长的乘积。 如图中,力F 的力矩就等于其分力F 1产生的力矩,M =F sin θ?L 两种方法不同,但求出的结果是一样的,对具体的问题选择恰当的方法会简化解题过程。 3. 力矩平衡条件: 力矩的代数和为零或所有使物体向顺时针方向转动的力矩之和等于所有使物体向逆时针方向转动的力矩之和。 F F 2
杠杆平衡条件应用 类型一简单计算 1.如图所示,轻质杠杆OB的重力忽略不计,OB=3OA,物体G 的重力为150 N。若要使物体G对水平地面的压力为零,则需要在 B 端施加的拉力F=______ N。 A.15 cm B.8 cm C.50 cm D.80 cm 类型二最小力问题 3.如图所示,一根重600 N 均匀铁棒长为100 cm,一端置于桌面,图中AC=25 cm,为了不使这根铁棒的B端下沉,在B端所加外力 F 至少应为______ N。4.如图所示,在轻质弯杠杆AOBC的 C 端施加一个最小的力F,提起悬挂在其 A 端重为200N的物体并保持静止状态,已知O为杠杆的支点,已知AO=50cm,OB=30cm,BC= 40cm,则所施加的最小动力 F 的大小应为N 。 2.如图所示为探究杠杆平衡条件的实验装置,杠杆平衡时,钩 码对杠杆的阻力F2=1.0 N,阻力臂l 2=20cm,弹簧测力计示数 F1= 2.5 N ,则动力臂l1为( )
类型三 力或力臂变化问题 7.如图所示,轻质杠杆在中点处悬挂重物,在杠杆的最右端施 加一个竖直向上的力 F ,杠杆在水平位置保持平衡, 保持力 F 方 向不变,当将重物向右移动时,要使杠杆保持平衡,力 F 将 _______ ;将杠杆顺时针方向缓慢转动,力 F 将 _______ 。 ( 均 选填“变大”“变小”或“不变”) 8.如图所示,长为 40 cm ,重为 10 N 的匀质杠杆可绕着 O 点转 动,作用在杠杆一端且始终与杠杆垂直的力 F ,将杠杆缓慢地由 与水平方向夹角为 30°的位置拉至水平位置 (忽略摩擦阻力 ) , 在这个过程中, 力 F 的大小将 (选填“增大”“不变” 或“减小” )。力 F 所做的功为 __ J 。 5.如图所示,用一根自重可忽略不计的撬棒撬石块,若撬棒 A .A B B . A C C .A D D .AE 点受到石块的压力是 1800 N ,且 AB = 1.8m ,BD =0.6m ,CD = 0.4 m ,则在 A 点施加最小动力 F 为 _______ N 。 6.如图所示,能使杠杆 OA 水平平衡的最小力的方向为 ( ) 9.图中 AOB 是可绕 O 点无摩擦转动的轻杆, A 端挂重 400 N 的 物块,AO 与 OB 长度之比为 5∶4。 人始终沿竖直方向拉挂在 B 端 的轻环。要使轻杆水平平衡,人应施加拉力为 __ N 。当 轻杆在图中虚线位置平衡时,人的拉力将 _________ ( 选填“变
课题力矩平 衡 课 型 新授 课 备 课 时 间 2014.10.10 教法 学法 教学 重点了解转动平衡的概念,理解力臂和力矩的概念教学 难点固定转动轴物体平衡的条件 上课时间检查人签 字 教学过程设计及知识点传授: 一、转动平衡:有转动轴的物体在力的作用下,处于静止或匀速转动状态。 明确转轴很重要: 大多数情况下物体的转轴是容易明确的,但在有的情况下则需要自己来确定转轴的位置。如:一根长木棒置于水平地面上,它的两个端点为AB,现给B端加一个竖直向上的外力使杆刚好离开地面,求力F的大小。在这一问题中,过A点垂直于杆的水平直线是杆的转轴。象这样,在解决问题之前,首先要通过分析来确定转轴的问题很多,只有明确转轴,才能计算力矩,进而利用力矩平衡条件。 二、力矩: 力臂:转动轴到力的作用线的垂直距离。 力矩:力和力臂的乘积。 计算公式:M=FL 单位: Nm 效果:可以使物体转动 (1)力对物体的转动效果 力使物体转动的效果不仅跟力的大小有关,还跟力臂有关,即力对物体的转动效果决定于力矩。①当臂等于零时,不论作用力多么大,对物体都不会产生转动作用。②当作用力与转动轴平行时,不会对物体产生转动作用,计算力矩,关键是找力臂。需注意力臂是转动轴到力的作用线的距离,而不是转动轴到力的作用点的距离。转动平衡状态和平动平衡状态比较记忆
2)大小一定的力有最大力矩的条件: ①力作用在离转动轴最远的点上; ②力的方向垂直于力作用点与转轴的连线。 (3)力矩的计算: ①先求出力的力臂,再由定义求力矩M=FL 如图中,力F的力臂为L F=Lsinθ 力矩M=F?L sinθ ②先把力沿平行于杆和垂直于杆的两个方向分解, 平行于杆的分力对杆无转动效果,力矩为零;平行于杆 的分力的力矩为该分力的大小与杆长的乘积。 如图中,力F的力矩就等于其分力F1产生的力矩,M=F sinθ?L 两种方法不同,但求出的结果是一样的,对具体的问题选择恰当的方法会简化解题过程 F L F θ L F θ L F2 F1 教学过程设计及知识点传授: 三、力矩平衡条件: 力矩的代数和为零或所有使物体向顺时针方向转动的力矩之和等于所有使物体向逆时针方向转动的力矩之和。 ∑M=0 或 ∑M顺=∑M逆 1.解决实际问题的步骤; (a)确定研究对象——哪个物体; (b)分析状态及受力——画示意图; (c)列出力矩平衡方程: ∑M=0或∑M顺=∑M逆; (d)解出字母表达式,代入数据; (e)作必要的讨论,写出明确的答案。教法学法
一、初中物理杠杆平衡条件的应用问题 1.如图所示,是自卸车的示意图,车厢部分可视为杠杆,则下列分析正确的是 A.B点是支点,液压杆施的力是动力,货物重力是阻力 B.B点是支点,物体A放在车厢前部可省力 C.C点是支点,物体A放在车厢后部可省力 D.C点是支点,物体A放在车厢前部可省力 【答案】C 【解析】 【分析】 【详解】 由图可知车厢绕着点C转动,所以点C为支点; 当物体放在车厢的后部时,动力臂大于阻力臂,因此省力,所以选项ABD都不正确,故答案为 C. 2.工人师傅利用如图所示的两种方式,将重均为 400N 的货物从图示位置向上缓慢提升一段距离.F1、F2始终沿竖直方向;图甲中BO=2AO,图乙中动滑轮重为 50N,重物上升速度为 0.02m/s.不计杠杆重、绳重和摩擦,则下列说法正确的是( ) A.甲方式F1由 150N 逐渐变大B.乙方式F2的功率为 3W C.甲乙两种方式都省一半的力D.乙方式中滑轮组的机械效率约为 88.9%【答案】D 【解析】 【详解】 A.由图知道,重力即阻力的方向是竖直向下的,动力F1的方向也是竖直向下的,在提升
重物的过程中,动力臂和阻力臂的比值是: 1 2 2 1 L OB L OA == 所以,动力F1的大小始终不变,故A错误; BC.由于在甲图中,OB=2OA,即动力臂为阻力臂的2倍,由于不计摩擦及杠杆自重,所以,由杠杆平衡条件知道,动力为阻力的一半,即 1 11 400N200N 2 2 F G ==?= 由图乙知道,承担物重是绳子的段数是n=3,不计绳重和摩擦,则 ()() 2 11 500N+50N150N 22 F G G =+=?= 动 , 即乙中不是省力一半;所以,绳子的自由端的速度是: v绳 =0.02m/s×3=0.06m/s, 故乙方式F2的功率是: P=F2v绳 =150N×0.06m/s=9W, 故BC错误; D.不计绳重和摩擦,乙方式中滑轮组的机械效率是: 400N 100%=100%=100%88.9% 400N50N W Gh W Gh G h η=???≈ ++ 有用 总轮 故D正确. 3.如图所示,一根均匀木尺放在水平桌面上,它的一端伸出桌面的外面,伸到桌面外面的部分长度是木尺长的 1 4 ,在木尺末端的B点加一个作用力F,当力F=3N时,木尺的另一端A开始向上翘起,那么木尺受到的重力为() A.3N B.9N C.1N D.2N 【答案】A 【解析】 【分析】 【详解】 设直尺长为l,如图所示: 从图示可以看出:杠杆的支点为O,动力
第四课时:力矩平衡条件的应用 教学目标: 一、知识目标: 1:理解有固定转动轴的物体的平衡条件; 2:能应用力矩平衡条件处理有关问题。 二、能力目标: 1:学会用数学知识处理物理问题; 2:进一步熟悉对物体的受力分析。 三、德育目标: 使学生学会要具体问题具体分析 教学重点: 力矩平衡条件的应用 教学难点: 用力矩平衡条件如何正确地分析和解决问题 教学方法: 讲授法、归纳法 教学用具: 投影仪、投影片 教学步骤: 一、导入新课 1.用投影片出示下列思考题: (1)什么是力矩的平衡? (2)有固定准确轴的物体的平衡条件是什么? 2、本节课我们继续学习运动有固定转动轴的物体的平衡求解问题的方法。 二、新课教学 (一)用投影片出示本节课的学习目标: 1:熟练应用力矩平衡条件解决有固定转动轴物体在转动平衡状态下的有关问题。 2:进一步提高受力分析的能力。 (二)学习目标完成过程: 1:用投影片出示例题1: 如图:BO 是一根质量均匀的横梁,重量G 1=80N ,BO 的一端安在B 点,可绕通 过B 点且垂直于纸面的轴转动,另一端用钢绳AO 拉着横梁保持水平,与钢绳的夹角o 30=θ,在横梁的O 点挂一个重物,重要G 2=240N ,求钢绳对横梁的拉力F 1: a :分析 (1)本题中的横梁是一个有固定转动轴的物体; (2)分析横梁的受力:拉力F 1,重力G 1,拉力F 2; (3)找到三个力的力臂并写出各自的力矩: F 1的力矩:θsin 1lc F G 1的力矩:2 1 l G F 2的力矩:l G 2
b :指导学生写出解题过程: c :用投影片展示正确的解题过程如下: 解:据力矩平衡条件有: 02sin 211=--l G l G l F θ 由此得:N G G F 560sin 22211=+=θ d :巩固训练: 如图所示,OAB 是一弯成直角的杠杆,可绕过O 点垂直于纸面的轴转动,杆OA 长30cm ,AB 段长为40cm ,杆的质量分布均匀,已知OAB 的总质量为7kg ,现在施加一个外力F ,使杆的AB 段保持水平,则该力作用于杆上哪一点,什么方向可使F 最小? 2:用投影片出示例题2: 一辆汽车重1.2×104N ,使它的前轮压在地秤上,测得的结果为6.7×103N ,汽车前后轮之间的举例是2.7m ,求汽车重心的位置,(即求前轮或后轮与地面接触点到重力作用线的距离) (1)分析:汽车可看作有固定转动轴的物体,若将后轮与地面的接触处作为转动轴,则汽车受到以下力矩的作用:一是重力G 的力矩;二是前轮受到的地秤对它的支持力的力矩;汽车在两个力矩的作用下保持平衡,利用转动平衡条件即可求出重心的位置。 (2)注意向学生交代清: a :地秤的示数指示的是车对地秤压力的大小; b :据牛顿第二定律得到车前轮受到的支持力的大小也等于地秤的示数。 (3)学生写出本题的解题步骤,并和课本比较; (4)讨论:为什么不将前轮与地秤接触处作为转动轴? 将前轮与地秤接触处作为转动轴,将会使已知力的力臂等于0,而另一个力(即后轮与地秤间的作用力)又是未知的,最后无法求解。 (5)巩固训练 一块均匀木板MN 长L =15cm ,G 1=400N ,搁在相距D =8m 的两个支架A 、B 上,MA =NB ,重G 2=600N 的人从A 向B 走去,如图:问人走过B 点多远时,木板会翘起来? 三、小结: 本节课我们主要学习了运用力矩平衡条件解题的方法: 1:确定研究对象: 2:分析研究对象的受力情况,找出每一个力的力臂,分析每一个力矩的转动方向; 3:据力矩平衡条件建立方程[M 合=0或M 顺=M 逆] 4:解方程,对结果进行必要的讨论。 四、作业: 练习二③④
金榜题名学校2018年寒假郫县校区 个性化教学 名师培优精讲 专题二 杠杆平衡条件的应用 〖导学案〗 一、 复习目标 1.复习杠杆的平衡条件,总结归类常见题目类型。 2.培养学生利用杠杆平衡条件解决实际问题的能力。 二、 知识储备 1.杠杆的平衡条件是指杠杆处于________或________状态, 杠杆的平衡条件是:_________________________________. 2.力臂是指从_______________的距离;当____到_______的距离作力臂时,此时力臂最大。 3.杠杆可分为:①_____________特点________________②___________特点____________③__________特点____________ 三、 常见题目类型分析 (一)杠杆的再平衡问题 例1、如图1所示,杠杆平衡,下列做法仍能使杠杆平衡的是( ) A .两边钩码各向外移动一格 B .左边增加一个钩码,右边向外移动一格 C .左右两边的钩码各减少一个 图1
D.左右两边的钩码各增加为原来的两倍。 例2、杠杆两端各挂一个重力不相等的实心铁块G A、G B,并且G A>G B,杠杆恰好平衡,如果把G A、G B都浸没在水中,不移动支点的位置,杠杆能否继续保持平衡? 练习: 1.用一根细棉线把一段直铁丝吊起来,让铁丝能在水平位置平衡,再将棉线右边的铁丝对折一下,铁丝还能在水平位置平衡吗? 2.杠杆左右两端分别挂有20 N及30 N的重物,杠杆在水平位置平衡.若使两端都减少5 N,则 ( ) A.左端下沉 B.右端下沉 C.仍保持平衡 D.以上说法都不对 3.一杠杆左右两端挂有质量不等的铜块和铁块,杠杆处于平衡,现将两铜块和铁块同时浸入水中,则杠杆将( ) A.顺时针转动 B.逆时针转动 C.保持平衡 D.无法判断。 (二)最大力臂问题 例3、如图2所示,要想将重500N,半径为的车轮滚上高为20cm的台阶,其所用的最小力应是_______________N. 图2 图3 练习 请在图3中画出用羊角锤起钉时所用的最小力F。(要求保留作图痕迹) (三)力的大小变化问题: 例4、如图4所示的杠杆正处于平衡状态,现将弹簧秤改为沿斜上方用力拉,要使这个杠杆仍保持平衡,弹簧秤的示数将() A.增大 B.不变 C.减小 D.无法判定