第二章 PSD传感器与信号处理电路
为了将电机轴的位置信号转换为相应的电信号,本文的传感器使用光电位置敏感器件PSD(Position Sensitive Detector)。
本章介绍PSD及其信号处理电路的工作原理及选型。
2.1 PSD传感器的工作原理及选型
传感器是一种以一定的精确度将被测量(如位置、力、加速度等)转换成与之有确定对应关系的、易于精确处理和测量的某种物理量(如电量)的测量部件或装置。
传感器在检测系统中是一个非常重要的环节,其性能直接影响到整个系统的测量精度和灵敏度。如果传感器的误差很大,后面的测量电路、放大器等的精度再高也将难以提高整个系统的精度。所以在系统设计时慎重选择传感器是十分必要的。
光电位置敏感器件PSD(Position Sensitive Detector)是一种对其感光面上入射光斑重心位置敏感的光电器件。即当入射光斑落在器件感光面的不同位置时,PSD将对应输出不同的电信号。通过对此输出电信号的处理,即可确定入射光斑在PSD的位置。入射光的强度和尺寸大小对PSD的位置输出信号均无关。PSD的位置输出只与入射光的“重心”位置有关。
PSD可分为一维PSD和二维PSD。一维PSD可以测定光点的一维位置坐标,二维PSD可测光点的平面位置坐标。由于PSD是分割型元件,对光斑的形状无严格的要求,光敏面上无象限分隔线,所以对光斑位置可进行连续测量从而获得连续的坐标信号。
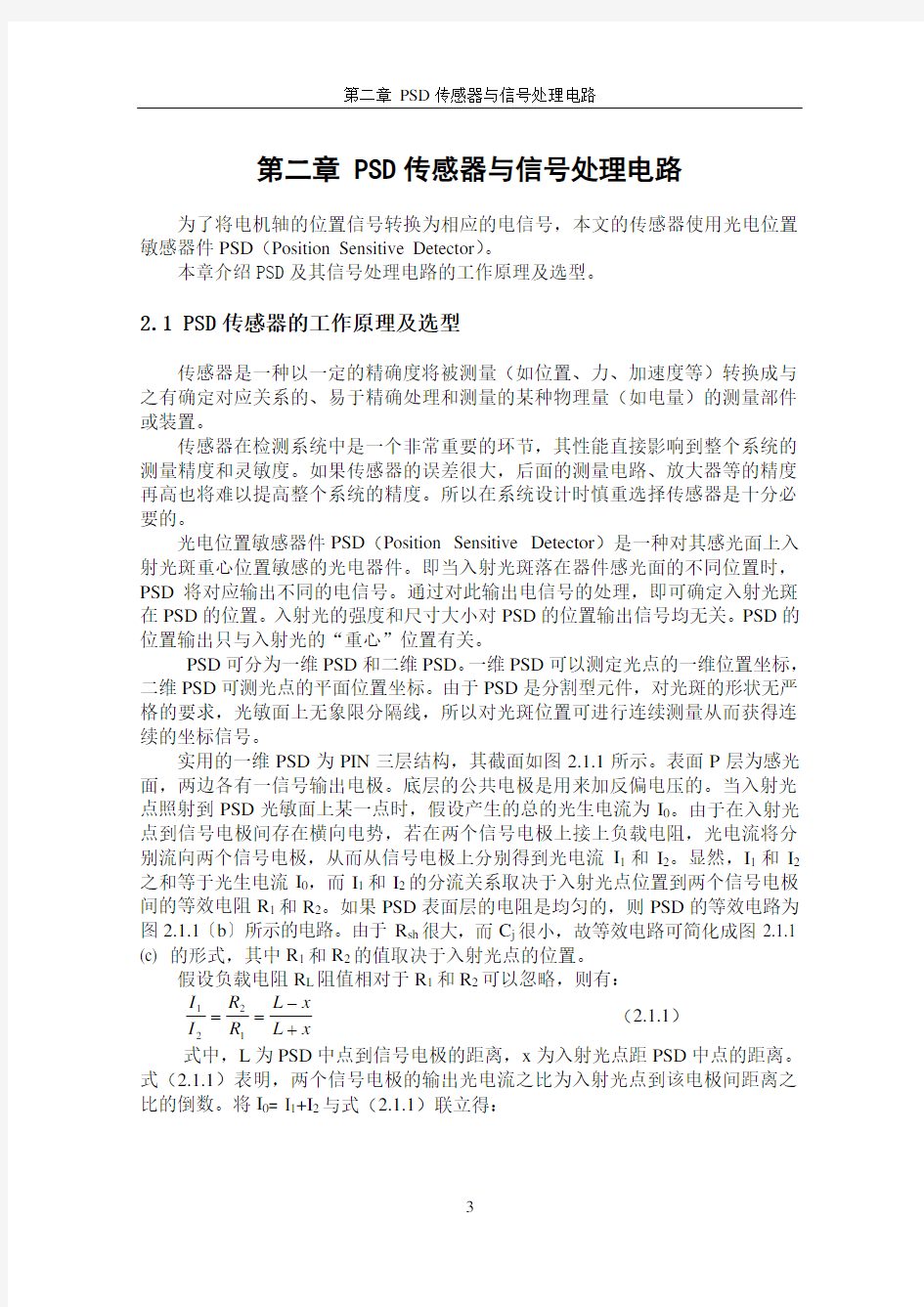
实用的一维PSD为PIN三层结构,其截面如图2.1.1所示。表面P层为感光面,两边各有一信号输出电极。底层的公共电极是用来加反偏电压的。当入射光点照射到PSD光敏面上某一点时,假设产生的总的光生电流为I0。由于在入射光点到信号电极间存在横向电势,若在两个信号电极上接上负载电阻,光电流将分别流向两个信号电极,从而从信号电极上分别得到光电流I1和I2。显然,I1和I2之和等于光生电流I0,而I1和I2的分流关系取决于入射光点位置到两个信号电极间的等效电阻R1和R2。如果PSD表面层的电阻是均匀的,则PSD的等效电路为图2.1.1〔b〕所示的电路。由于R sh很大,而C j很小,故等效电路可简化成图2.1.1 (c) 的形式,其中R1和R2的值取决于入射光点的位置。
假设负载电阻R L阻值相对于R1和R2可以忽略,则有:
I I
R
R
L x
L x
1
2
2
1
==
-
+
(2.1.1)
式中,L为PSD中点到信号电极的距离,x为入射光点距PSD中点的距离。式(2.1.1)表明,两个信号电极的输出光电流之比为入射光点到该电极间距离之比的倒数。将I0= I1+I2与式(2.1.1)联立得:
图2.1.1 PSD 的结构及等效电路
a)截面电路 b)等效电路 c)简化的等效电路
L
x L I I 20
1-= (2.1.2) L
x L I I 202+= (2.1.3)
从以上两式可以看出,当入射光点位置固定时,PSD 的单个电极输出电流与入射光强度成正比。而当入射光强度不变时,单个电极的输出电流与入射光点距PSD 中心的距离x 呈线性关系。若将两个信号电极的输出电流作如下处理:
P I I I I x L X =-+=2121 (2.1.4) 则得到的结果只与光点的位置坐标x 有关,而与入射光强度无关,此时PSD 就成为仅对入射光点位置敏感的器件。P x 称为一维PSD 的位置输出信号。
本文选用的PSD 是日本HAMAMATSU PHOTONICS 公司生产的S1352一维线阵列PSD
2.2 PSD 传感器信号处理电路原理
PSD 两极输出的只是光电流I 1和I 2,要想得到位置输出信号P x 必须要有相应的信号处理电路的支持。下面介绍PSD 传感器信号处理电路原理。
由上一节可知,P x=(I1-I2)/(I1+I2),因此其基本检测和处理电路的设计思想是先将I1和I2进行加减运算然后再进行除法运算。电路原理图如图2.2.1所示,光电流I1和I2先经过IC1和IC2的低通滤波将高频噪声和脉冲干扰去处掉。然后分别通过加法电路IC3和IC5和减法电路IC4得到I1+I2和I1-I2。最后I1+I2和I1-I2通过除法电路IC6得到位置输出信号P x=(I1-I2)/(I1+I2)
图2.2.1 一维PSD基本检测原理图
该电路只适用于没有外界光只有信号光的理想情况。在实际检测的环境中,外界光是存在的,并且会给上面的原理电路的测试结果带来很大的误差,因此在电路设计中要着重考虑如何消除外界光源的信号干扰。
2.3 C5923 PSD信号处理电路
本文选用的PSD信号处理电路是由HAMAMATSU PHOTONICS公司出品的C5923一维PSD信号处理电路。该信号处理电路是专门针对HAMAMATSU公司生产的一维PSD传感器设计的。C5923采用调制解调技术来去除信号光中的背景光干扰。
C5923信号处理电路的所有组件都安装在一块PCB电路板上,这些电路包括:调制信号光源驱动电路、前置放大电路、信号加法、减法电路、信号除法电路、信号采样保持电路。具体的电路原理图参见图2.3.1,现就各个电路的功能来介绍C5923。
2.3.1 滤波电路
滤波电路的功能是让指定频段的信号通过,而将其余频段上的信号加以抑制或使其急剧衰减。运算放大器和RC网络组成的有源滤波器与无源滤波器件相比具有体积小,重量轻,线性特性好的优点。其次,由于运算放大器的增益和输入阻抗很高,输出阻抗很低,所以有源滤波器还能提供一定的信号增益和缓冲作用。
图2.3.1 C5923信号处理电路原理图
C5923采用的低通滤波器如图2.3.2所示。输入的光电流型号I1和I2通过滤波器转换成放大的电压信号。由于加在PSD上的光信号是由一定频率的方波驱动的,因此PSD两个引脚输出的I1和I2也是交流信号。C1在电路中起的是隔直通交的作用。C2和R2组成的RC网络和运算放大器一起构成低通滤波器,将输入信号中的脉冲干扰和高频噪声过滤掉,滤波的带宽的频率应比解调频率高。通过改变R1和R2的值还可以调整低通滤波器的输出增益。
图2.3.2 低通滤波器
2.3.2 运算电路
I1和I2经过滤波之后得到两个与I1和I2倒相的电压信号V S1和V S2。为了得到最终的位置输出信号P x。必须要进行(V S2-V S1)/(V S1+V S2)的运算。整个运算可以分为加法运算,减法运算和除法运算三部分来进行。下面将逐个介绍相应的运算电路。
C5923的加法电路是通过图2.3.3所示的电路来实现的。
图2.3.3 加法电路
这个电路接成反相放大器,由于电路存在虚短,V I=0,在P端接地时,V N=0,故N点为虚地。显然,它是属于多端输入的电压并联负反馈电路。利用虚短,虚断的概念,对反相输入节点可得下面的方程式:
-V0=(R f/R1)V S1+(R f/R2)V S2 (2.3.1)
这就是加法运算的表达式,式中负号是因为反相输入所引起的,如果电路里R1= R2= R f,则上式变为:
-V0=V S1+V S2 (2.3.2)
在一般的加法电路设计中,加法电路的输出端还要再接一级反相电路消去负号来实现完全符合常规的算术加法。由于在这个系统中减法运算的结果要和加法运算的结果做除法。因此加法运算结果前的负号可以由减法运算通过调整两个减法输入的次序来做调整。因此在C5923中加法运算电路的后级反相电路可以省略了,从而使整个电路更加精简。
C5923的减法电路是通过图2.3.4所示的差分式电路来实现的。
图2.3.4 减法电路
从电路结构上来看,它是反相输入和同相输入相结合的放大电路。在理想运放的情况下,根据虚断,虚短原理,可以得到下列方程式:
在上式中,如果选取电阻值满足R f/R1= R3/R2的关系,输出电压可简化为
即输出电压与两个输入电压之差(V S2-V S1)成比例,所以图2.3.4所示的减法电路实际上就是一个差分式放大电路。当R f= R1时,V o= V S2-V S1。
C5923的除法功能是使用实时模拟信号计算单元AD538来实现的。
AD538是一个单片实时计算电路,它能给模拟信号提供精确的乘法、除法和幂运算。输入信号动态范围可以很大,运算输出信号的线性好,单片设计使它的具有功耗小,可靠性高的特点。AD538通常运用于乘法,除法计算、平方、平方根以及三角函数近似计算。
AD538总的运算表达式是V OUT=V Y(V Z/V X)m,根据不同的需要可以改变AD538的外置电路和输入信号的连接来实现不同的运算。C5923使用了它的双输入除法运算功能。图2.3.5是AD538进行V OUT =10(V Z /V X)运算的连线图。
图2.3.5 AD538实现V OUT =10(V Z /V X)
如上图所示AD538的6,7引脚接±15伏特的电源。14,13引脚分别为信号地和电源地。分母模拟信号V Z和分子模拟信号V X和分别接到1脚和2,16脚。再加上外置调零电路。最终8脚的输出信号V OUT =10(V Z /V X)。式子中除法项前的系数10是由外置电路决定的。
在C5923中通过对AD538的5脚电压调节可以改变系数的大小来线性调整最终输出的幅值。同时C5923还引出参考电压V REF来测试光源的强度。如果测出光源强度偏小可以调整C5923的可调电阻VR2来增加系数来提高增益。具体的C5923的AD538布线参考图2.3.1的U10。
通过上面三个运算电路,信号光斑在PSD上的位置线性对应输出位置电压信号P x。
2.3.3 调制解调电路
PSD在接受信号光的同时不可避免的会受到外界光的影响。外界光将叠加在信号光之上共同产生光电流。这对最终测试结果的影响是非常大的。在考虑到外界光干扰的同时也应注意到这种干扰的叠加是线性的,即有下面的等式:
f(IN S)=I S(2.3.5a)
f(IN w)=I w (2.3.5b)
f(IN S+IN w)=I S+I w(2.3.5c)
式子中IN S是信号光输入,IN w是外界光输入,I S是没有外界光时的信号光产生的光电流,I w是没有信号光时外界光干扰产生的光电流。由上式可知信号光和外界光叠加到PSD后产生的光电流是信号光和外界光单独作用在PSD上输出的线性叠加
根据这个特性可以运用调制解调技术把外界光干扰去除掉。
C5923的消除外界光干扰电路的设计思想是:
首先保证外界光为恒定的光强,设外界光的干扰信号输入为IN w,设外界光经过PSD产生的光电流为I w,由于外界光强恒定所以IN w和I w也为固定常值。
由C5923产生一个周期为300μs、脉冲宽度为90μs的方波如图2.3.6所示来驱动信号光源,从而得到调制的信号光。在没有外界光干扰的情况下,设方波高电平时输入信号为IN S,经过PSD产生的光电流为I S,方波低电平时光源不发光所以输入信号和产生的光电流都为零。
图2.3.6 脉冲驱动方波
在实际检测过程中外界光是一直存在的。加在PSD上的光是调制信号光和外界干扰光的叠加。在驱动方波高电平时输入信号为IN S+IN w,由线性特性可知高电平时产生的光电流为I S+I w。在驱动方波低电平时由于没有信号光所以输入信号为IN w,产生的光电流为0+I w。
分别在驱动方波高电平和低电平的时候对光电流采样保持,然后将高电平的采样保持信号I S+I w和低电平的采样保持信号I w做减法运算,最终得到的是没有外界光干扰的驱动方波高电平信号光电流I s。在实际电路设计上由于考虑到滤波电路等因素,这个采样保持电路是在加法电路和减法电路之后的。这并不影响电路去除外界光的功能。
通过以上的调制解调,能将外界光干扰从信号光中去除掉。但它的前提条件是保持外界光是恒定光源。如果不是恒定光源,在高、低电平时采样的I w不是同一个值,这会导致最后测试结果错误。
C5923的调制解调电路主要有两个部分:脉冲方波发生电路和采样保持差分电路。
脉冲方波发生电路主要功能是:提供一个周期为300μs、脉冲宽度为90μs 的驱动方波给信号光源同时要给采样保持电路一个驱动方波高电平时刻采样触发脉冲和一个驱动方波低电平时刻采样触发脉冲。
脉冲方波发生器电路如图2.3.7所示,图上的标号仍沿用图2.3.1的标号方式。脉冲方波发生器是由一片555定时器,一片十进制计数/分配器TC4017和一片TC4071或门组成的。
图2.3.7 脉冲方波发生器
U6=555 U7=TC4017 U8=TC4071
555定时器一般是由两个比较器、一个基本RS触发器和一个集电极开路的放电三极管三部分组成。C5923里555定时器的外围电路使它工作在方波发生方式。从555定时器的6脚输出周期为30μs的方波信号。该方波信号输入到TC4017的14脚时钟输入端CP。
TC4017是一个十进制计数/分配器,它的
引出端功能图如图2.3.8所示。它有三个输入
端。其中15脚清零端C r和13脚使能端在
TC4017工作时置零。在图2.3.1里把这两端接
地了。时钟输入端CP接外部计数脉冲,外部脉
冲上升沿计数。
TC4017有10个译码输出端Y0、Y1、
Y2…Y9,每个输出端的状态和输入计数器的
时钟脉冲的个数相对应。例如输入4个时钟脉
冲,如果计数器从0开始计数,则此时译码输
出端Y4应为高电平,其余输出端均为低电平。
当清零端和使能端接地,时钟输入端CP接一个周期时钟脉冲时,译码输出端输出的信号也是一个周期脉冲信号。这个输出信号的周期为输入时钟脉冲周期的十倍,脉冲宽度大小等于输入时钟信号周期。不
同的译码输出端的输出信号对应不同的相位。在C5923中Y4、Y5、Y6输出到TC4071的输入端,Y5输出作为光源驱动方波高电平时刻采样触发脉冲。Y8输出作为光源驱动方波低电平时刻采样触发脉冲。
TC4071是四个或门组成的集成电路,其
逻辑关系是:当全部输入端都处于低电平时,
输出端才处于低电平;只要有一个输入端出现
高电平,输出端便为高电平。
TC4071的引出端功能图如图 2.3.9所
示。从TC4017输入的Y4、Y5、Y6分别连接
到TC4071的8、9、13输入端进行或运算后从
TC4071的11脚输出光源驱动方波。该驱动方
波经过共射集放大器放大后可以直接驱动信
号光源。光源的电源端直接连接到图2.3.7的
A、K端口即可。
图2.3.10是脉冲方波发生器中几个芯片输出端的波形。图左边的标号如555.3表示的是555定时器的3号端口的波形。如图所示TC4071的11号端口输出的是一个周期为300μs、脉冲宽度为90μs的周期脉冲方波。TC4071的1号和9号端口分别输出光源驱动方波高、低电平时刻采样触发脉冲。
图2.3.10 脉冲方波发生器波形图
采样保持差分电路的主要功能是:接收由脉冲方波发生器发出的光源驱动方波高、低电平时刻采样触发脉冲,在相应时刻对调制信号进行采样保持,然后将高电平时刻采样的信号与低电平时刻采样的信号做减法运算,最后得到的就是消除了外界光干扰的解调信号。
采样保持差分电路如图2.3.11所示,图上的标号基本沿用图2.3.1的标号方式。采样保持差分电路是由两片LF398芯片组成的采样保持电路、一片TL074分
压器以及一片TL074减法电路组成的。减法电路在前面已经有详细介绍,下面介绍LF398的工作方式
图2.3.11 采样保持差分电路
U4,5=LF398 U8,9=TL074
图2.3.12 LF398
LF398是一个采样保持集成电路,它的引出端如图2.3.12所示。LF398一共有8个端口,其中1、4端口接电源;3号端口接采样保持输入信号,在C5923里它接的是调制信号;6号端口接电压保持电容;7号端口接参考电压;8号端口接
采样触发脉冲;5号端口输出3号端口的采样保持信号。
LF398的工作原理是当8号端口电平高于参考电压时,输入与输出导通,同时给电压保持电容充电;当8号端口电平低于参考电压时,输入与输出断开,输出电压与输入无关而是由电压保持电容的电压决定的。
在C5923的采样保持差分电路中,两片LF398的8号端口分别连接由TC4071的1号和9号端口输出的光源驱动方波高、低电平时刻采样触发脉冲。这样就将输入的调制信号分别在光源驱动方高电平时刻和低电平时刻进行采样保持,然后通过减法电路将两者相减,最后得到的就是解调信号。
通过使用脉冲方波发生电路与采样保持电路,实现了信号的调制解调,在原理上这组电路过滤了信号光中的背景光干扰。它在实际测试时的效果在下一章中会给出具体的测试比较。
2.4 信号光源
选用合适的光源对本课题十分重要,下面先介绍两种应用十分广泛的信号光源:发光二极管和半导体激光器。
2.4.1 发光二极管
发光二极管(light emitting diode ,LED ),是利用正向偏置PN 结中电子与空穴的辐射复合发光的,是自发辐射发光,不需要较高的注入电流产生粒子数反转分布,也不需要光学谐振腔,发射的是非相干光。
图2.4.1双异质结半导体发光二极管的结构示意图
图2.4.1是双异质结半导体发光二极管的结构示意图。P-GaAs 是产生荧光的复合区(有源区),它和与之相邻的P-AI x Ga 1-x As 层构成限制电子和光波的同型异质结P-P 结。而和与之相邻的N-AI y Ga 1-y As 层构成限制空穴和光波的反型异质结P-N 结。在正向偏压的作用下,P-AI x Ga 1-x As 区中的空穴向P-GaAs 区扩散,N-AI y Ga 1-y As 区中的电子向P-GaAs 区扩散,结果电子和空穴在P-GaAs 区内复合而发荧光,属于自发辐射发光。由于在P-GaAs 层的两边有两个异质结对载流子(电子和空穴)起限制作用,使载流子有效地集中在P-GaAs 区内复合发光,故其内部量子效率非常高,这是半导体发光二极管所要求的。
P-AI x Ga 1-x As
N-AI y Ga 1-y As
P- GaAs
发光二极管工作需要施加正向偏置电压,以提供驱动电流。典型的驱动电路如图2.4.2所示,将LED 接入到晶体三极管的集电极,通过调节三极管基极偏置电压,可获得需求的辐射光功率。在光通信中以LED 为光源的场合,需要对LED 进行调制,则调制信号通过一电容耦合到基极,输出光功率则被电信号所调制。
图2.4.2 LED 驱动电路
LED 的特点如下所示:
1、LED 辐射光为非相干光,光谱较宽,发散角大。
2、LED 的发光颜色非常丰富,通过选用不同的材料,可以实现各种发光颜色。如采用GaP:ZnO 或GaAaP 材料的红色LED ,GaAaP 材料的橙色、黄色LED ,以及GaN 蓝色LED 等。而且通过红、绿、蓝三原色的组合,可以实现全色化。
3、LED 的辉度高。随着各种颜色LED 辉度的迅速提高,即使在日光下,由LED 发出的光也能视认。正是基于这一优势,在室外用信息板、广告牌、道路通行状况告示牌等方面的应用正迅速扩大。
4、LED 的单元体积小。在其他显示器件不能使用的极小的范围内也可使用,再加上低电压、低电流驱动的特点,作为电子仪器设备、家用电器的指示灯、信号灯的使用范围还会进一步扩大。
5、寿命长,基本上不需要维修。可作为地板、马路、广场地面的信号光源,是一个新的应用领域。
LED 现在在指示灯,显示器,信号发射光源等领域得到广泛的应用。
2.4.2 半导体激光器
半导体激光器,也称激光二极管(laser diode ,LD )的物理结构是在发光二极管的结间安置一层具有光活性的半导体,其端面经过抛光后具有部分反射功能,因而形成一个光谐振腔。在正向偏置的情况下,LED 结发射出光来并与光谐振腔相互作用,从而进一步激励从结上发射出单波长的光,这种光的物理性质与材料有关。
图2.4.3所示的半导体激光器由一个薄有源层(厚度约0.1μm )、P 型和N 型限制层构成。有源层夹在P 型和N 型限制层中间,由此产生的PN 异质结通过欧姆接触正向偏置,电流在覆盖整个激光器芯片的较大面积注入。这样的激光器面积大,称为大面积激光器。由于在平行于结平面的侧向无光限制结构,沿激光器的整个宽度上都存在光辐射,损耗太大,阈值电流较高,这是大面积激光器的主要缺点。为解决侧向辐射和光限制问题,实际的激光器采用了增益导引型和折射率导引型结构。
+5V
V
图2.4.3 半导体激光器
半导体激光器的谱线窄、方向性好、功率高,在光通信、测量及光存储等领域具有广泛的应用。
本课题选用半导体激光器来作为信号发射光源。
2.5 系统的连线与初始调试
上文介绍了PSD 、C5932和信号发射光源的工作原理和选型,下面介绍这三部分之间的连线与初始工作状态调试。
2.5.1 系统的连线
对于S1352型PSD ,C5923提供IN1、IN2、GND 三个插孔。可以将PSD 三个引脚直接插在C5923相应的插孔上。在本课题中为了安装方便使用连线将引脚和插孔连接在一起,为了将噪声干扰控制到允许的范围连线的长度应小于300mm 。
C5923提供了专用的15脚连接器。如下图所示:
6脚,7脚为电源端,分别接直流电源
+15V 和-15V 的输出。 4脚,5脚为信号光源的驱动端,分别为
正极与负极的输出。
8脚和15脚为GND 接地端。
1脚输出幅值参考电压信号。
3脚输出位置电压信号。
系统连线如图2.5.2所示,C5923通过15脚连接器与电源、测试仪器(示波器或万用表)和信号光源连接。系统工作时打开电源,光源发射调制信号光,C5923根据照在PSD 上光斑的重心位置相应的输出位置电压信号,最终从测试仪器读出位置信号。
解理面
金属接触
电流
有源层
P 型
N 型
300μm 100μm
200μm
图2.5.2 C5923工作连线图
2.5.2 系统的初始工作状态调试
旋转C5923元件面上的可调电阻VR2可以调整输出电压幅度大小,通过测量C5923的1脚(输出幅值参考电压信号)的电压值可以得到位置信号的输出幅值范围。
在本系统中为了与模数转换器件等设备电压匹配。调节VR2,使C5923的1脚输出电压为5V。这时位置信号的电压输出范围为-5V ~+5V。此时光斑重心位置与输出电压的关系如图2.5.3所示。
图2.5.3光斑重心位置相关电压输出图
PSD受光面的长度为30mm.,设PSD中点为坐标原点,光斑重心坐标为X。X的范围为-15mm~+15mm。则有输出电压与光斑位置的关系式2.5.1。
X= 3×V o(2.5.1)
上式X的单位为mm,V o的单位为伏特。这样就可以通过测量C5923的3脚输出电压V o来计算光斑重心位置了。在实际工作中还要将仪器的误差考虑进去。
第1章 传感器与检测技术基础 1.某线性位移测量仪,当被测位移由4.5mm 变到5.0mm 时,位移测量仪的输出电压由3.5V 减至 2.5V ,求该仪器的灵敏度。 解:该仪器的灵敏度为 25 .40.55.35.2-=--=S V/mm 2.某测温系统由以下四个环节组成,各自的灵敏度如下: 铂电阻温度传感器: 0.45Ω/℃ 电桥: 0.02V/Ω 放大器: 100(放大倍数) 笔式记录仪: 0.2cm/V 求:(1)测温系统的总灵敏度; (2)记录仪笔尖位移4cm 时,所对应的温度变化值。 解: (1)测温系统的总灵敏度为 18.02.010002.045.0=???=S cm/℃ (2)记录仪笔尖位移4cm 时,所对应的温度变化值为 22.2218 .04==t ℃ 6.有三台测温仪表,量程均为0~800℃,精度等级分别为2.5级、2.0级和1.5级,现要测量500℃的温度,要求相对误差不超过2.5%,选那台仪表合理? 解:2.5级时的最大绝对误差值为20℃,测量500℃时的相对误差为4%;2.0级时的最大绝对误差值为16℃,测量500℃时的相对误差为3.2%;1.5级时的最大绝对误差值为12℃,测量500℃时的相对误差为2.4%。因此,应该选用1.5级的测温仪器。 10.试分析电压输出型直流电桥的输入与输出关系。 答:如图所示,电桥各臂的电阻分别为R 1、 R 2、 R 3、R 4。U 为电桥的直流电源电压。当四臂电阻R 1=R 2=R 3=R 4=R 时,称为等臂电桥;当R 1=R 2=R ,R 3=R 4=R ’(R ≠R ’)时,称为输出对称电桥;当R 1=R 4=R ,R 2=R 3 =R ’(R ≠R ’)时,称为电源对称电桥。 D 直流电桥电路 当电桥输出端接有放大器时,由于放大器的输入阻抗很高,所以可以认为电桥的负载电阻为无穷大,这时电桥
《传感器与检测技术》试题 一、填空:(20分) 1,测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。(2分) 2.霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制电流时的霍尔电势大小。 3、光电传感器的理论基础是光电效应。通常把光线照射到物体表面后产生的光电效应分为三类。第一类是利用在光线作用下光电子逸出物体表面的外光电效应,这类元件有光电管、光电倍增管;第二类是利用在光线作用下使材料内部电阻率改变的内光电 效应,这类元件有光敏电阻;第三类是利用在光线作用下使物体内部产生一定方向电动势的光生伏特效应,这类元件有光电池、光电仪表。 4.热电偶所产生的热电势是两种导体的接触电势和单一导体的温差电势组成的,其表达式为Eab (T ,To )=T B A T T B A 0d )(N N ln )T T (e k 0σ-σ?+-。在热电偶温度补偿中补偿导线法(即冷端延长线法)是在连接导线和热电偶之间,接入延长线,它的作用是将热电偶的参考端移至离热源较远并且环境温度较稳定的地方,以减小冷端温度变化的影响。 5.压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下,其内部产生机械压力,从而引起极化现象,这种现象称为正压电效应。相反,某些铁磁物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。(2分) 6. 变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电感量(①增加②减小③不变)(2分) 7. 仪表的精度等级是用仪表的(① 相对误差 ② 绝对误差 ③ 引用误差)来表示的(2分) 8. 电容传感器的输入被测量与输出被测量间的关系,除(① 变面积型 ② 变极距型 ③ 变介电常数型)外是线性的。(2分) 9. 电位器传器的(线性),假定电位器全长为Xmax, 其总电阻为Rmax ,它的滑臂间的阻值可以用Rx = (① Xmax/x Rmax,②x/Xmax Rmax ,③ Xmax/XRmax ④X/XmaxRmax )来计算。 10、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积增大时,铁心上线圈的电感量(①增大,②减小,③不变)。 11、在平行极板电容传感器的输入被测量与输出电容值之间的关系中,(①变面积型,②变极距型,③变介电常数型)是线性的关系。 12、在变压器式传感器中,原方和副方互感M 的大小与原方线圈的匝数成(①正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成比例),与回路中磁阻成(①正比,②反比,③不成比例)。 13、传感器是能感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,传感器通常由直接响应于被测量的敏感元件 和产生可用信号输出的转换元件以及相应的信号调节转换电路组成。 14、热电偶所产生的热电势是由两种导体的接触电势和单一导体的温差电势组成。 15、电阻应变片式传感器按制造材料可分为① _金属_ 材料和②____半导体__体材料。它们在受到外力作用时电阻发生变化,其中①的电阻变化主要是由 _电阻应变效应 形成的,而②的电阻变化主要是由 温度效应造成的。 半导体 材料传感器的灵敏度较大。 16、在变压器式传感器中,原方和副方互感M 的大小与 绕组匝数 成正比,与 穿过线圈的磁通_成正比,与磁回路中 磁阻成反比。 17.磁电式传感器是利用导体和磁场发生相对运动而在导体两端 产生感应电势的。而霍尔式传感器为霍尔元件在磁场中有电磁效应(霍尔效应)而输出电势的。霍尔式传感器可用来测量电流,磁场,位移,压力。(6分) 18.测量系统的静态特性指标通常用输入量与输出量的对应关系来表征(5分) 简答题 1 简述热电偶的工作原理。(6分)
实验报告 课程名称:数字信号处理 实验名称:低通滤波器设计实验 院(系): 专业班级: 姓名: 学号: 指导教师: 一、实验目的: 掌握IIR数字低通滤波器的设计方法。 二、实验原理: 2.1设计巴特沃斯IIR滤波器 在MATLAB下,设计巴特沃斯IIR滤波器可使用butter 函数。 Butter函数可设计低通、高通、带通和带阻的数字和模拟IIR滤波器,其特性为使通带内的幅度响应最大限度地平坦,但同时损失截止频率处的下降斜度。在期望通带平滑的情况下,可使用butter函数。butter函数的用法为:
[b,a]=butter(n,Wn)其中n代表滤波器阶数,W n代表滤波器的截止频率,这两个参数可使用buttord函数来确定。buttord函数可在给定滤波器性能的情况下,求出巴特沃斯滤波器的最小阶数n,同时给出对应的截止频率Wn。buttord函数的用法为:[n,Wn]= buttord(Wp,Ws,Rp,Rs)其中Wp和Ws分别是通带和阻带的拐角频率(截止频率),其取值范围为0至1之间。当其值为1时代表采样频率的一半。Rp和Rs分别是通带和阻带区的波纹系数。 2.2契比雪夫I型IIR滤波器。 在MATLAB下可使用cheby1函数设计出契比雪夫I 型IIR滤波器。 cheby1函数可设计低通、高通、带通和带阻契比雪夫I 型滤IIR波器,其通带内为等波纹,阻带内为单调。契比雪夫I型的下降斜度比II型大,但其代价是通带内波纹较大。cheby1函数的用法为:[b,a]=cheby1(n,Rp,Wn,/ftype/)在使用cheby1函数设计IIR滤波器之前,可使用cheblord 函数求出滤波器阶数n和截止频率Wn。cheblord函数可在给定滤波器性能的情况下,选择契比雪夫I型滤波器的最小阶和截止频率Wn。cheblord函数的用法为: [n,Wn]=cheblord(Wp,Ws,Rp,Rs)其中Wp和Ws分别是通带和阻带的拐角频率(截止频率),其取值范围为0至1之间。当其值为1时代表采样频率的一半。Rp和Rs分别是通带和阻带区的波纹系数。 三、实验要求: 利用Matlab设计一个数字低通滤波器,指标要求如下:
信号处理电子电路图全集 一.波形发生器电路图 交流驱动电路实现的基本要求是要在选通像素点两端施加交变脉冲信号,而在非选通端加零偏压或负偏压。为了增加电路应用的灵活性,并且为研究OLED的驱动信号变化对于其性能的影响提供方便,要求交流驱动电路的相位和占空比可调。为此,本文设计了一个可以灵活控制的波形信号发生器,其结构为图1所示的一个由双D型触发器构成的振荡器。该振荡器的起振、停止可以控制,输出波形的相位和占空比也可以调节,其工作波形如图2所示。 二.红外接收头的构造 红外接收电路通常由红外接收二极管与放大电路组成,放大电路通常又由一个集成块及若干电阻电容等元件组成,并且需要封装在一个金属屏蔽盒里,因而电路比较复杂,体积却很小,还不及一个7805体积大! SFH506-38与RPM-638是一种特殊的红外接收电路,它将红外接收管与放大电路集成在一体,体积小(大小与一只中功率三极管相当),密封性好,灵敏度高,并且价格低廉,市场售价只有几元钱。它仅有三条管脚,分别是电源正极、电源负极以及信号输出端,其工作电压在5V左右.只要给它接上电源即是一个完整的红外接收放大器,使用十分方便。 它的主要功能包括放大,选频,解调几大部分,要求输入信号需是已经被调制的信号。经过它的接收放大和解调会在输出端直接输出原始的信号。从而使电路达到最简化!灵敏度和抗干扰性都非常好,可以说是一个接收红外信号的理想装置。 · [图文] T形R-2R电阻网络D/A转换电路
· [图文] KD9561组成的开关式警音发生器电路 · [图文] 石英晶体矩形波振荡器电路 · [图文] 方波振荡器电路 · [图文] 8031与DAC0832双缓冲方式接口电路 · [组图] 矩形波电压发生器 · [组图] 用DAC0832产生锯齿波电路 · [图文] 功率变换电路 · [图文] 数字温湿度传感器SHT11与CC2430应用接口电路 · [图文] 调制解调器与电脑接口电路 · [图文] 数字信号的纠错原因及解决方法 · [组图] 变压器电桥原理图 · [图文] 利用运算放大器式电路虚地点减小电缆电容原理图 · [组图] 差动脉宽(脉冲宽度)调制电路 · [图文] 通断温度控制电路--On-Off Temperature Control · [组图] Phorism with 12V · [组图] 击落模型定位器电路 (Downed Model Locator II) · [组图] 红外线开关电路-Infra Red Switch · [组图] 电池组接收器的放电电路--Discharger for Receiver Battery Packs · [组图] 多通道火箭发射器 -Multi Rocket Launcher · [组图] 阻抗变换器电路 · [图文] 步进电机各相绕组驱动电路 · [图文] 速度判别电路 · [图文] 一种实用的步进电机驱动电路 · [图文] 4线步进电机分列分列电路原理图 · [组图] 击落模型定位器电路 (Downed Model Locator) · [图文] CW431CS比较器应用线路 · [图文] 智能天线技术的应用 · 天线的基本概念及制作 · [组图] 红外接收头的构造 · [图文] 手机信号指示器电路原理图 · [组图] 二阶高通分频器单元电路 · [组图] 二阶分频器低通单元电路 · [组图] 分立元件无稳态多谐振荡电路 · [图文] 用Max038制作的函数波形发生器 · [图文] 多波调频信号产生器电路 · [组图] 方波和三角波发生器电路 · [组图] RC桥式正弦振荡电路 · [图文] AD8228集成芯片构成的阻抗匹配电路 · [图文] 分立元件组成的阻抗匹配电路 · [图文] 采用间接电流反馈架构的IA · [图文] 使用三运放搭建输入缓冲级和输出级电路
实验一 维纳滤波 1. 实验内容 设计一个维纳滤波器: (1) 产生三组观测数据,首先根据()(1)()s n as n w n =-+产生信号()s n ,将其加噪,(信噪比分别为20,10,6dB dB dB ),得到观测数据123(),(),()x n x n x n 。 (2) 估计()i x n ,1,2,3i =的AR 模型参数。假设信号长度为L ,AR 模型阶数为N ,分析实验结果,并讨论改变L ,N 对实验结果的影响。 2. 实验原理 滤波目的是从被噪声污染的信号中分离出有用的信号来,最大限度地抑制噪声。对信号进行滤波的实质就是对信号进行估计。滤波问题就是设计一个线性滤波器,使得滤波器的输出信号()y n 是期望响应()s n 的一个估计值。下图就是观测信号的组成和信号滤波的一般模型。 观测信号()()()x n s n v n =+ 信号滤波的一般模型 维纳滤波解决从噪声中提取信号的滤波问题,并以估计的结果与真值之间的误差均方值最小作为最佳准则。它根据()()(),1, ,x n x n x n m --估计信号的当前 值,它的解以系统的系统函数()H z 或单位脉冲()h n 形式给出,这种系统常称为最佳线性滤波器。 维纳滤波器设计的任务就是选择()h n ,使其输出信号()y n 与期望信号()d n 误差的均方值最小。
假设滤波系统()h n 是一个线性时不变系统,它的()h n 和输入信号都是复函数,设 ()()()h n a n jb n =+ 0,1, n = 考虑系统的因果性,可得到滤波器的输出 ()()()()()0 *m y n h n x n h m x n m +∞ ===-∑ 0,1, n = 设期望信号()d n ,误差信号()e n 及其均方误差()2 E e n ???? 分别为 ()()()()()e n d n y n s n y n =-=- ()()()()()()22 2 0m E e n E d n y n E d n h m x n m ∞=?? ????=-=--????? ????? ∑ 要使均方误差为最小,需满足: ()() 2 0E e n h j ?????=? 整理得()()0E x n j e n *??-=??,等价于()()0E x n j e n * ??-=?? 上式说明,均方误差达到最小值的充要条件使误差信号与任一进入估计的输入信号正交,这就是正交性原理。 将()()0E x n j e n * ??-=??展开,得 ()()()()00m E x n k d n h m x m +∞ *** =????--=?? ???? ?∑ 整理得 ()()()0 dx xx m r k h m r m k +∞ *=-=-∑ 0,1,2, k = 等价于()()()()()0 dx xx xx m r k h m r k m h k r k +∞ ==-=*∑ 0,1,2, k = 此式称为维纳-霍夫(Wiener-Holf )方程。解此方程可得到最优权系数 012,,, h h h ,此式是Wiener 滤波器的一般方程。 定义
几种常见传感器总结 1、红外对管: 红外对管是根据红外辐射式传感器原理制作的一种红外对射式传感器。与一般红外传感器一样,红外对管也由三部分构成:光学系统(发射管)、探测器(接收管)、信号调理及输出电路。红外探测器是利用红外辐射与物质相互作用所呈现的物理效应来探测红外辐射的。在此接收管通过对发射管所发出的红外线做出反应实现,实现信号的采集,再通过后续信号处理电路完成信号的采集和输出。 2、霍尔传感器: 霍尔传感器是基于霍尔效应的一种传感器。霍尔效应是指置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势的现象。该电势称霍尔电势。霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点。对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。目前市场上的霍尔传感器都是集成了外围的测量电路输出的是数字信号,即当传感器检测到磁场时将输出高低电平信号。传感器主要包括两部分,一为检测部分的霍尔元件,一为提供磁场的磁钢。霍尔电流传感器反应速度一般在7微妙,根本不用考虑单片机循环判断的时间. 3、光电开关: 光电开关是一种利用感光元件对变化的入射光加以接收, 并进行光电转换, 同时加以某种形式的放大和控制, 从而获得最终的控制输出“开”、“关”信号的器件。上图为典型的光电开关结构图。是一种反射式的光电开关,它的发光元件和接收元件的光轴在同一平面且以某一角度相交,交点一般即为待测物所在处。当有物体经过时, 接收元件将接收到从物体表面反射的光, 没有物体时则接收不到。透射式的光电开关, 它的发光元件和接收元件的光轴是重合的。当不透明的物体位于或经过它们之间时, 会阻断光路, 使接收元件接收不到来自发光元件的光, 这样起到检测作用。光电开关的特点是小型、高速、非接触, 而且与TTL、MOS等电路容易结合。此类传感器目前也多为开关量传感器,输出的为1,0开关量信号,可以和单片机直接连接使用。光电开关广泛应用于工业控制、自动化包装线及安全装置中作光控制和光探测装置。可在自控系统中用作物体检测,产品计数, 料位检测,尺寸控制,安全报警及计算机输入接口等用途。 4、超声波传感器: 利用超声波在超声场中的物理特性和各种效应而研制的装置可称为超声波换能器、探测器或传感器。超声波探头按其工作原理可分为压电式、磁致伸缩式、电磁式等, 而以压电式最为常用。压电式超声波探头常用的材料是压电晶体和压电陶瓷, 这种传感器统称为压电式超声波探头。它是利用压电材料的压电效应来工作的: 逆压电效应将高频电振动转换成高频机械振动, 从而产生超声波, 可作为发射探头; 而利用正压电效应, 将超声振动波转换成电信号, 可用为接收探头。超声波探头主要由压电晶片组成,既可以发射超声波,也可以接收超声
传感器的定义传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。国际电工委员会(IEC:International Electrotechnical Committee)的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的第一道关口。 传感器把某种形式的能量转换成另一种形式的能量。有两类:有源的和无源的。有源传感器能将一种能量形式直接转变成另一种,不需要外接的能源或激励源。 无源传感器不能直接转换能量形式,但它能控制从另一输入端输入的能量或激励能,传感器承担将某个对象或过程的特定特性转换成数量的工作。其“对象”可以是固体、液体或气体,而它们的状态可以是静态的,也可以是动态(即过程)的。对象特性被转换量化后可以通过多种方式检测。对象的特性可以是物理性质的,也可以是化学性质的。按照其工作原理,它将对象特性或状态参数转换成可测定的电学量,然后将此电信号分离出来,送入传感器系统加以评测或标示。 传感器原理结构在一段特制的弹性轴上粘贴上专用的测扭应片并组成变桥,即为基础扭矩传感器;在轴上固定着:(1)能源环形变压器的次级线圈,(2)信号环形变压器初级线圈,(3)轴上印刷电路板,电路板上包含整流稳定电源、仪表放大电路、V/F变换电路及信号输出电路。在传感器的外壳上固定着: (1)激磁电路,(2)能源环形变压器的初级线圈(输入),(3) 信号环形变压器次级线圈(输出),(4)信号处理电路 工作过程 向传感器提供±15V电源,激磁电路中的晶体振荡器产生400Hz的方波,经过TDA2030功率放大器即产生交流激磁功率电源,通过能源环形变压器T1从静止的初级线圈传递至旋转的次级线圈,得到的交流电源通过轴上的整流滤波电路得到±5V的直流电源,该电源做运算放大器AD822的工作电源;由基准电源AD589与双运放AD822组成的高精度稳压电源产生±4.5V的精密直流电源,该电源既作为电桥电源,又作为放大器及V/F转换器的工作电源。当弹性轴受扭时,应变桥检测得到的mV级的应变信号通过仪表放大器AD620放大成 1.5v±1v的强信号,再通过V/F转换器LM131变换成频率信号,通过信号环形变压器T2 从旋转的初级线圈传递至静止次级线圈,再经过外壳上的信号处理电路滤波、整形即可得到与弹性轴承受的扭矩成正比的频率信号,该信号为TTL电平,既可提供给专用二次仪表或频率计显示也可直接送计算机处理。由于该旋转变压器动--静环之间只有零点几毫米的间隙,加之传感器轴上部分都密封在金属外壳之内,形成有效的屏蔽,因此具有很强的抗干扰能力。 传感器分类倾角传感器 倾角传感器在军事、航天航空、工业自动化、工程机械、铁路机车、消费电子、海洋船舶等领域得到广泛运用。辉格公司为国内用户提供全球最全面、最专业的产品方案和服务。提供超过500种规格的伺服型、电解质型、电容型、电感型、光纤型等原理的倾角传感器。 加速度传感器(线和角加速度)
例说信号处理与滤波器设计 目录 数字时代 (2) 数字信号处理的应用 (3) 频率——信号的指纹 (5) 卷积可以不卷 (8) 向量运算的启示 (11) 滤波器设计征程 (16) 最后一击——滤波的实现方法 (22) 纵览全局 (27)
数字时代 信号处理是对原始信号进行改变,以提取有用信息的过程,它是对信号进行变换、滤波、分析、综合等处理过程的统称。数字信号处理是将信号以数字方式表示并处理的理论和技术;模拟信号处理是指用模拟系统对模拟信号进行处理的方法或过程。 数字信号处理课程的主要内容包括信号分析与处理。两者并不是孤立的,不同的信号处理方法往往需要选择不同的信号表示形式。两者的区别主要表现在,信号处理是用系统改变输入信号,以得到所期望的输出信号,如信号去噪;而信号分析往往是通过变换(傅里叶变换、小波变换等),或其它手段提取信号的某些特征,如语音信号的基本频率,图像的直方图等。 早期的信号处理局限于模拟信号,随着数字计算机的飞速发展,信号处理的理论和方法得以飞速发展,出现了不受物理制约的纯数学的加工,即算法,并确立了数字信号处理的领域。现在,对于信号的处理,人们通常是先把模拟信号变成数字信号,然后利用高效的数字信号处理器(DSP:Digital Signal Processor)或计算机对其进行数字形式的信号处理。 一般地讲,数字信号处理涉及三个步骤: (1)模数转换(A/D转换):把模拟信号变成数字信号,是一个对自变量和幅值同时进行 离散化的过程,基本的理论保证是采样定理。 (2)数字信号处理(DSP):包括变换域分析(如频域变换)、数字滤波、识别、合成等。 (3)数模转换(D/A转换):把经过处理的数字信号还原为模拟信号。通常,这一步并不 是必须的。 图1数字信号处理基本步骤
光电转换及信号处理电路设计 与CCD等探测器不同,PIN光电二极管对于探测目标输出信号是一个电流信号,而且在距离探测目标较远时照射到探测面的光信号很微弱,在预定电压偏置下输出电流会比较小,因而可以概括PIN的输出信号为一个微弱电流信号,对于PIN的输出信号处理,是一个微弱信号处理的过程。 光电转换及信号处理模块 图1 光电转换及信号处理模块整体设计示意图 通常情况下,电流信号的采集和处理都是比较困难的,故首先需要对PIN 的信号进行电流到电压的转化。微弱电流信号转化而来的电压信号一般也是微弱信号,而且传输线耦合进去的交流噪声有可能会淹没目标信号,故为了提高信噪比,需要在采集之前对信号进行前置放大。 由于被测信号也是可见光信号,在进行光电探测时很容易受到杂散光和PIN 自身暗电流的影响,导致噪声信号和目标信号一同被放大,在后续电路中不易消除,为了减少杂散光和PIN暗电流带来的噪声、背景噪声和元器件噪声,本光电信号处理电路设计了一个参考PIN光电转换电路,用来接收杂散光和背景噪声,参考PIN光电转换电路与探测信号PIN光电转换电路及的参数一致,前置放大电路的参数也一样,但是在实验过程中由于与目标光信号之间的光路被人为完全遮挡,故只能接收到杂散光信号和背景噪声信号。在后续的差分放大电路中通过信号同向相减,把系统噪声和背景噪声去除,保证了最终采集信号具有较高的信噪比。 在最后的滤波电路设计过程中,考虑到被测目标光信号的调制频率不会超过200KHz,而空气和电路中存在着大量的高频噪声,为了保证即将进入数据采集
模块的信号有较高的信噪比,需要滤除掉高频噪声,于是需要根据被测信号频率的不同设计一款低通滤波器或者带通滤波器。 综上所述,本光电转换和信号处理模块由光电转换电路、前置放大电路、差分放大电路和滤波电路四个部分组成,模块整体示意图如图4-1所示。 1 光电转换电路设计 光电二极管的光探测方式有两种结构:一是光电导模式,在这种模式下,需给光电二极管加反向偏置电压,存在暗电流I d,由此会产生较大的噪声电流,有非线性,通常应用在高速场合;二是光电压模式,在这种模式下,光电二极管处于零偏状态,不存在暗电流I d,有较低的噪声,线性好,噪声低(主要是热噪声),适合于比较精确的测量[31]。在微弱信号检测中比较常用的是光电压模式,具体光电检测电路图如图2所示。 图2 光电压模式PIN光电转换电路 光电二极管工作于短路状态,极大地降低了暗电流的影响,从而使光电二极管得到最大SNR,进而使后续放大电路仅放大与光强成正比的电流。 考虑到对目标光信号的探测频率不同,本文采用了两款响应率不同PIN光电二极管,用于探测低频光信号的PIN选择的是西门子(SIEMENS)公司的BPX65硅光敏二极管,用于探测高频光信号的高速PIN选择的是日本滨松的S5973硅光敏二极管。 BPX65具有频率响应范围广,暗电流小,高灵敏度等特点,最高工作温度可达125°,其主要特性参数如下所示: (1)光谱响应范围为350nm~1100nm,峰值波长850nm,适合白光测量; (2)暗电流I R≤5nA; (3)光谱灵敏度(Sλ):0.55 A/W; (4)光敏面接收半角(Half angle):±45°; (5)受光面积为1mm2,远小于传感器与探测目标的距离;
浙江工业大学之江学院010/011 学年 第二学期《传感技术与信号处理》期终试卷 (考试类型:闭卷) 班级姓名学号 一、填空( 每空1.5分共45分) 1.通常把频谱中作为信号的频宽,称为1/10法则;对于有跃变的信号,取作为频宽。 2.测试装置的灵敏度愈高,测量范围往往愈________,稳定性愈______。 3.若要信号在传输过程中不失真,测试系统的输出和输入的幅频特性必须满足(表达式)__________________,相频频特性必须满足(表达式)__________________。 4.为了消除应变片的温度误差,可采用的温度补偿措施包括:、、 和。 5. 电感式传感器按工作原理可分为_______________、________________和电涡流式三种。 6.为了提高极距变化式电容传感器的灵敏度,应_______初始间隙。但初始间隙过_______时,一方面使测量范围_______,另一方面容易使_______击穿。 7.压电式传感器测量电路的前置放大器有_________________和_________________两种,_________________作为前置放大器时压电式传感器输出信号与测量导线的距离无关。 8. 光电耦合器是由一个和一个共同封装在一个外壳内组成的复合型转换元件,又称为。 9.光栅传感器中莫尔条纹的一个重要特性是具有位移放大作用。如果两个光栅距相等,即W=0.02mm,其夹角θ=0.1°,则莫尔条纹的宽度B=_____________莫尔条纹的放大倍数K=_____________。 10.热电偶产生热电势必须具备的基本条件是 ____________、____________。 11.霍尔式传感器为______ _______在磁场中有电磁效应(霍尔效应)而输出电势的。霍尔式元件的电路符号图为:_________________。 14.热电动势由两部分电动势组成,一部分是两种导体的________电动势,另一部分是单一导体的______电动势。
南京师范大学中北学院 毕业设计(论文) (2013届) 题目:信号处理电路的研究与设计 专业:电子信息工程 姓名:学号: 指导教师:职称:教授 南京师范大学中北学院教务处制
摘要 目前,信号产生与处理电路应用非常广泛。例如,在测量、遥控、通信、自动控制、和超声波电焊等加工设备之中,都有正弦波振荡器的应用;在工程应用中,例如在实验用的低频及高频信号产生电路中,往往要求正弦波震荡电路的震荡频率有一定的稳定度,有时要求震荡频率十分稳定,如通讯系统中的射频振荡电路、数字系统的时钟产生电路等。非正弦波在一些电子系统中有着日益广泛的应用,如数字系统需要的特殊信号,如方波﹑三角波都可以通过非正弦波产生电路来得到。此外,在电信装备和各类控制系统中,滤波器应用极为广泛;滤波器的优劣直接决定产品的优劣,所以,对滤波器的研究和生产历来为各国所重视。 基于TL082CD,本设计介绍了正弦波信号的产生,以及基于555定时器构成的多谐振荡电路的探究与设计。同时也介绍了信号处理的相关内容,其中包括信号的叠加和二阶有源滤波放大电路的探究与设计。使用Multisim电路仿真软件对其进行仿真,用来验证电路理论设计的正确性和可行性。 关键词:正弦波信号产生方波信号产生信号叠加二阶有源滤波放大
Abstract Currently, the signal generation and processing circuit is widely used. For example, in the measurement, remote control, communication, automatic control, and ultrasonic welding and other processing equipment into, engineering applications, for example in the experiment with the low and sine-wave oscillation frequency of the oscillator circuit degree of stability, sometimes requires
图像信号处理电路故障分析思路与检修 技巧 顾名思义,图像信号处理电路处理的是图像信号。在彩电维修过程中,电 视机表现出什么样的故障现象,才能判定故障与图像信号处理电路有关或在图 像信号处理电路呢?吾以为,电视机出现有光栅、有字符、无图像或图像不正常现象,均可判定图像信号处理电路可能存在故障。彩色电视机中的图像信号处 理电路涉及的电路较多,电视机的功能不同、屏幕尺寸大小不同,图像信号处 理电路的组成和电路也存在很大差异。如果对不同时期的彩色电视机图像信号 处理电路加以比较分析,会发现彩色电视机中的图像信号处理电路由基本电路 和附加电路组成。基本电路是电视机不可缺少的电路,电视机有了基本电路, 就可以重现图像和声音;电视机图像信号处理电路设计附加电路的目的,是为 了改善图像质量、增加电视机的功能。图像信号处理电路基本电路由高频调谐器、幅频特性选择电路、图像中频信号放大和视频检波电路、亮度信号和色度 信号处理电路、视频信号放大电路组成。早期的彩色电视机,如长虹M11(代表 机型有CK53A、C1742等)机芯,由于电视机功能简单,屏幕尺寸也不大,图像 信号处理电路就只有基本电路。随着电视技术的发展和电视机功能的增加,现 代彩色电视机已在原基本电路的基础上,增加了不少附加电路。当然,电视机 功能不同、屏幕尺寸大小不同,增加的附加功能也不一样。图(3)为长虹CN-9 机芯(21")彩电图像信号处理电路组成框图。图中的高频调谐器、幅频特性选择电路、图像中频信号放大和视频检波电路、亮度信号和色度信号处理电路、RGB 矩阵和视频信号放大电路为基本电路,第二伴音选择和吸收、TV/AV切换开关 电路为附加电路。图像信号处理基本电路中的高频调谐器,其作用是对射频电 视信号进行放大、混频,它输入为不同频率的射频电视信号,输出为固定频率 的图像中频信号。在目前的彩电维修行业中,彩电维修人员对高频调谐器均不 进行维修,所以,彩电维修初学者没有必要对高频调谐器内部电路的电路结构 和工作过程进行详细了解和掌握,关心的应是它的结果,即正常的高频调谐器 需要什么样的外部条件,才能将接收下来的射频电视信号,转换成图像中频信号。目前彩色电视机中所使用的高频调谐器,有电压合成式和频率合成式两种。高频调谐器不同,需要外电路为其提供的工作条件也不一样。电压合成式高频
a 第二章 PSD 传感器与信号处理电路 为了将电机轴的位置信号转换为相应的电信号,本文的传感器使用光电位置敏感器件PSD (Position Sensitive Detector )。 本章介绍PSD 及其信号处理电路的工作原理及选型。 2.1 PSD 传感器的工作原理及选型 传感器是一种以一定的精确度将被测量(如位置、力、加速度等)转换成与之有确定对应关系的、易于精确处理和测量的某种物理量(如电量)的测量部件或装置。 传感器在检测系统中是一个非常重要的环节,其性能直接影响到整个系统的测量精度和灵敏度。如果传感器的误差很大,后面的测量电路、放大器等的精度再高也将难以提高整个系统的精度。所以在系统设计时慎重选择传感器是十分必要的。 光电位置敏感器件PSD (Position Sensitive Detector )是一种对其感光面上入射光斑重心位置敏感的光电器件。即当入射光斑落在器件感光面的不同位置时,PSD 将对应输出不同的电信号。通过对此输出电信号的处理,即可确定入射光斑在PSD 的位置。入射光的强度和尺寸大小对PSD 的位置输出信号均无关。PSD 的位置输出只与入射光的“重心”位置有关。 PSD 可分为一维PSD 和二维PSD 。一维PSD 可以测定光点的一维位置坐标,二维PSD 可测光点的平面位置坐标。由于PSD 是分割型元件,对光斑的形状无严格的要求,光敏面上无象限分隔线,所以对光斑位置可进行连续测量从而获得连续的坐标信号。 实用的一维PSD 为PIN 三层结构,其截面如图2.1.1所示。表面P 层为感光面,两边各有一信号输出电极。底层的公共电极是用来加反偏电压的。当入射光点照射到PSD 光敏面上某一点时,假设产生的总的光生电流为I 0。由于在入射光点到信号电极间存在横向电势,若在两个信号电极上接上负载电阻,光电流将分别流向两个信号电极,从而从信号电极上分别得到光电流I 1和I 2。显然,I 1和I 2之和等于光生电流I 0,而I 1和I 2的分流关系取决于入射光点位置到两个信号电极间的等效电阻R 1和R 2。如果PSD 表面层的电阻是均匀的,则PSD 的等效电路为图2.1.1〔b 〕所示的电路。由于R sh 很大,而C j 很小,故等效电路可简化成图2.1.1 (c) 的形式,其中R 1和R 2的值取决于入射光点的位置。 假设负载电阻R L 阻值相对于R 1和R 2可以忽略,则有: (2.1.1)I I R R L x L x 1221==-+式中,L 为PSD 中点到信号电极的距离,x 为入射光点距PSD 中点的距离。式(2.1.1)表明,两个信号电极的输出光电流之比为入射光点到该电极间距离之比的倒数。将I 0= I 1+I 2与式(2.1.1)联立得:
ABS轮速传感器及其信号处理 车轮防抱死制动系统简称ABS 是基于汽车轮胎与路面之间的附着特性而开发的高技术制动系统。ABS由信号传感器、逻辑控制器和执行调节器组成。其控制目标是:当汽车在应急制动时,使车轮能够获得最佳制动效率,同时又能实现车轮不被抱死、侧滑,使汽车在整个制动过程中保持良好的行驶稳 定性和方向可操作性。 在ABS系统中,几乎都离不开对车轮转动角速度的测定,因为只要有了车轮转动角速度,其它参数(如车轮转动角和加速度)均可通过计算机计算获得。ABS的工作原理就是在汽车制动过程中不断检测车轮速度的变化,按一定的控制方法,通过电磁阀调节轮缸制动压力,以获得最高的纵向附着系数和较高的侧向附着系数,使车轮始终处于较好的制动状态。因此精确检测车轮速度是ABS系统正常工作的先决条件。 1 ABS轮速传感器及特性分析 通常,用来检测车轮转速信号的传感器有磁电式、电涡流式和霍尔元件式。由于磁电式轮速传感器工作可靠,几乎不受温度、灰尘等环境因素影响,所以在ABS系统中得到 广泛应用。 1.1 磁电式轮速传感器的工作原理 磁电式传感器的基本原理是电磁感应原理。根据电磁感应定律,当N匝线圈在均恒 磁场内运动时,设穿过线圈的磁通为φ,则线圈内的感应电势ε与磁通变化率有 如下关系: 若线圈在恒定磁场中作直线运动并切割磁力线时,则线圈两端的感应电势ε为:
式中,N为线圈匝数;B为磁感应强度;L为每匝线圈的平均长度:为线圈相对磁场运动的速度;θ为线圈运动方向与磁场方向的夹角。
若线圈相对磁场作旋转运动并切割磁力线时,则线圈两端的感应电势ε为: 式中,ω为旋转运动的相对角速度;A为每匝线圈的截面积;φ为线圈平面的法线 方向与磁场方向间的夹角。 根据上述基本原理,磁电传感器可以分为两种类型:变磁通式(变磁阻式)和恒定磁通式。由于变磁通式磁电传感器结构简单、牢固、工作可靠、价格便宜,被广泛用于车辆上作为检测车轮转速的轮速传感器。图1为变磁通式磁电传感器的结构原理。其中传感器线圈、磁铁和外壳均固定不动,齿轮安装在被测的旋转体上。 当齿轮与被测的车轮轴一起转动时,齿轮与铁芯之间的气隙随之变化,从而导致气隙磁阻和穿过气隙的主磁通发生变化。结果在感应线圈中感应出交变的电动势,其频率等 于齿轮的齿数Z和车轮轴转速n的乘积,即: f=Zh (4) 感应电动势的幅值与车轮轴的转速和气隙有关,当气隙一定时,转速越大,其幅值越大;当转速一定时,气隙越小,其幅值越大。 1.2 轮速传感器特性试验研究 目前,测量车轮转动速度的一般方法是将变磁阻式磁电传感器安装在车轮总成的非旋转部分上,与随车轮一起转动的由导磁材料制成的齿圈相对。当齿圈随车轮一起转动时,由于齿圈与传感器之间气隙的的交替变化,导致两者间磁阻的变化,从而在传感器内的线 圈上感生出交变的电压信号。
基于TMS320F28335的信号处理电路设计 摘要:鉴于TMS320F206即将停产,需要寻求一款DSP对其进行替代,替换DSP 后的信号处理电路需完成温度值、一路电气零位、三路加表惯性量、三路陀螺惯 性量的采集以及惯性量的补偿计算和数据组帧发送的功能。该信号处理电路基于 浮点DSP TMS320F28335,该DSP的引用简化了惯性测量装置中的误差补偿计算,为单位类似的产品提供了一套可行方案。TMS320F28335丰富的外设使得信号处 理电路具有可再简化的潜力,其在惯性测量装置信号处理电路中的应用具有广阔 前景。通过系统试验,验证了系统软硬件设计的正确性高的应用推广价值。 关键词:DSP;信号处理电路;浮点 1、前言 现有技术方案主要为TMS320F206+异步串口SC28L202的方案,电路上电后 完成外围电路的初始化,TMS320F206通过SC28L202相应的I/O完成AD7716的 配置,AD7716初始化完成后每隔一个固定时间自动完成加表数据的采集并输出 一个中断信号,所采数据存于FIFO中。陀螺每隔一个固定时间将一帧数据存于 SC28L202的FIFO中,当TMS320F206判到第四个AD7716中断来到后从相应的FIFO中取加表、陀螺数据,TMS320F206完成加表、陀螺数据温度补偿计算后组 帧并向相应的接口发送数据。 本文以某信号处理电路设计为背景,为了解决TMS320F206即将停产的问题,电路架构由TMS320F206+异步串口SC28L202的方案升级为TMS320F28335+异步 串口TL16C752CIPFB架构。其中DSP为TI公司的TMS320F28335 [1],异步串口为 TI公司的TL16C752CIPFB [2]。 2、某信号处理电路原理TMS320F206+异步串口SC28L202架构设计 信号处理电路采用了TMS320F206+异步串口SC28L202架构。信号处理电路 主要由加速度计信号采集电路、陀螺信号采集电路、测温电路、数字信号处理及 控制电路、外设输出接口电路组成。 如果继续使用现有方案,现面临几个问题,主要表现在以下几个方面。 (1)TMS320F206即将停产,本方案中的DSP需进行更换; (2)另外由于TMS320F206为定点DSP,而在补偿计算时要进行浮点运算,为满足 这种需要,在进行补偿时需要对数据进行复杂的移位操作,补偿计算耗时较多, 效率低下; (3)总体需要更换异步串口SC28L202。 为了解决上述问题,DSP采用TI公司的TMS320F28335 ,异步串口采用TI公 司TL16C752CIPFB实现。该方法可以解决上述问题,但是,由于引入了DSP TMS320F28335 ,异步串口TL16C752CIPFB,需要研究基于TMS320F28335的信号 处理电路设计,实现DSP、稳定、可靠的工作。 3、基于TMS320F28335信号处理电路架构设计 TMS320F28335数字信号处理器是属于TI公司C2000系列的一款浮点DSP控 制器,详细信息如下。 (1)单周期指令执行时间:最快达6.67ns; (2)CPU: 32为定点处理器、单精度浮点运算单元、32位算术逻辑单元、16位×16位乘法器和32位×32位乘法器; (3)存储器:地址空间为2M×16、SRAM为34K×16、OTP ROM为1K×16、引导 ROM为8K×16、FLASH为256K×16;
第二章 PSD传感器与信号处理电路 为了将电机轴的位置信号转换为相应的电信号,本文的传感器使用光电位置敏感器件PSD(Position Sensitive Detector)。 本章介绍PSD及其信号处理电路的工作原理及选型。 2.1 PSD传感器的工作原理及选型 传感器是一种以一定的精确度将被测量(如位置、力、加速度等)转换成与之有确定对应关系的、易于精确处理和测量的某种物理量(如电量)的测量部件或装置。 传感器在检测系统中是一个非常重要的环节,其性能直接影响到整个系统的测量精度和灵敏度。如果传感器的误差很大,后面的测量电路、放大器等的精度再高也将难以提高整个系统的精度。所以在系统设计时慎重选择传感器是十分必要的。 光电位置敏感器件PSD(Position Sensitive Detector)是一种对其感光面上入射光斑重心位置敏感的光电器件。即当入射光斑落在器件感光面的不同位置时,PSD将对应输出不同的电信号。通过对此输出电信号的处理,即可确定入射光斑在PSD的位置。入射光的强度和尺寸大小对PSD的位置输出信号均无关。PSD的位置输出只与入射光的“重心”位置有关。 PSD可分为一维PSD和二维PSD。一维PSD可以测定光点的一维位置坐标,二维PSD可测光点的平面位置坐标。由于PSD是分割型元件,对光斑的形状无严格的要求,光敏面上无象限分隔线,所以对光斑位置可进行连续测量从而获得连续的坐标信号。 实用的一维PSD为PIN三层结构,其截面如图2.1.1所示。表面P层为感光面,两边各有一信号输出电极。底层的公共电极是用来加反偏电压的。当入射光点照射到PSD光敏面上某一点时,假设产生的总的光生电流为I0。由于在入射光点到信号电极间存在横向电势,若在两个信号电极上接上负载电阻,光电流将分别流向两个信号电极,从而从信号电极上分别得到光电流I1和I2。显然,I1和I2之和等于光生电流I0,而I1和I2的分流关系取决于入射光点位置到两个信号电极间的等效电阻R1和R2。如果PSD表面层的电阻是均匀的,则PSD的等效电路为图2.1.1〔b〕所示的电路。由于R sh很大,而C j很小,故等效电路可简化成图2.1.1 (c) 的形式,其中R1和R2的值取决于入射光点的位置。 假设负载电阻R L阻值相对于R1和R2可以忽略,则有: I I R R L x L x 1 2 2 1 == - + (2.1.1) 式中,L为PSD中点到信号电极的距离,x为入射光点距PSD中点的距离。式(2.1.1)表明,两个信号电极的输出光电流之比为入射光点到该电极间距离之比的倒数。将I0= I1+I2与式(2.1.1)联立得: