工业机器人三维仿真系统的设计与实现
杨华;田新诚;许传俊
【摘要】本文从运动学正问题和运动学反问题两方面,对机器人运动学模型的建立方法作了分析,讨论了一种通用的机器人三维仿真系统的设计与实现;本系统使用OpenGL和Visual C++,满足了在普通硬件平台上实现高质量实时三维动画的要求,提高了系统的易开发性和通用性.
【期刊名称】《机器人技术与应用》
【年(卷),期】2002(000)005
【总页数】3页(P36-38)
【关键词】运动学模型三维图形仿真 OpenGL
【作者】杨华;田新诚;许传俊
【作者单位】山东大学控制科学与工程学院;山东大学控制科学与工程学院;山东大
学控制科学与工程学院
【正文语种】中文
【中图分类】工业技术
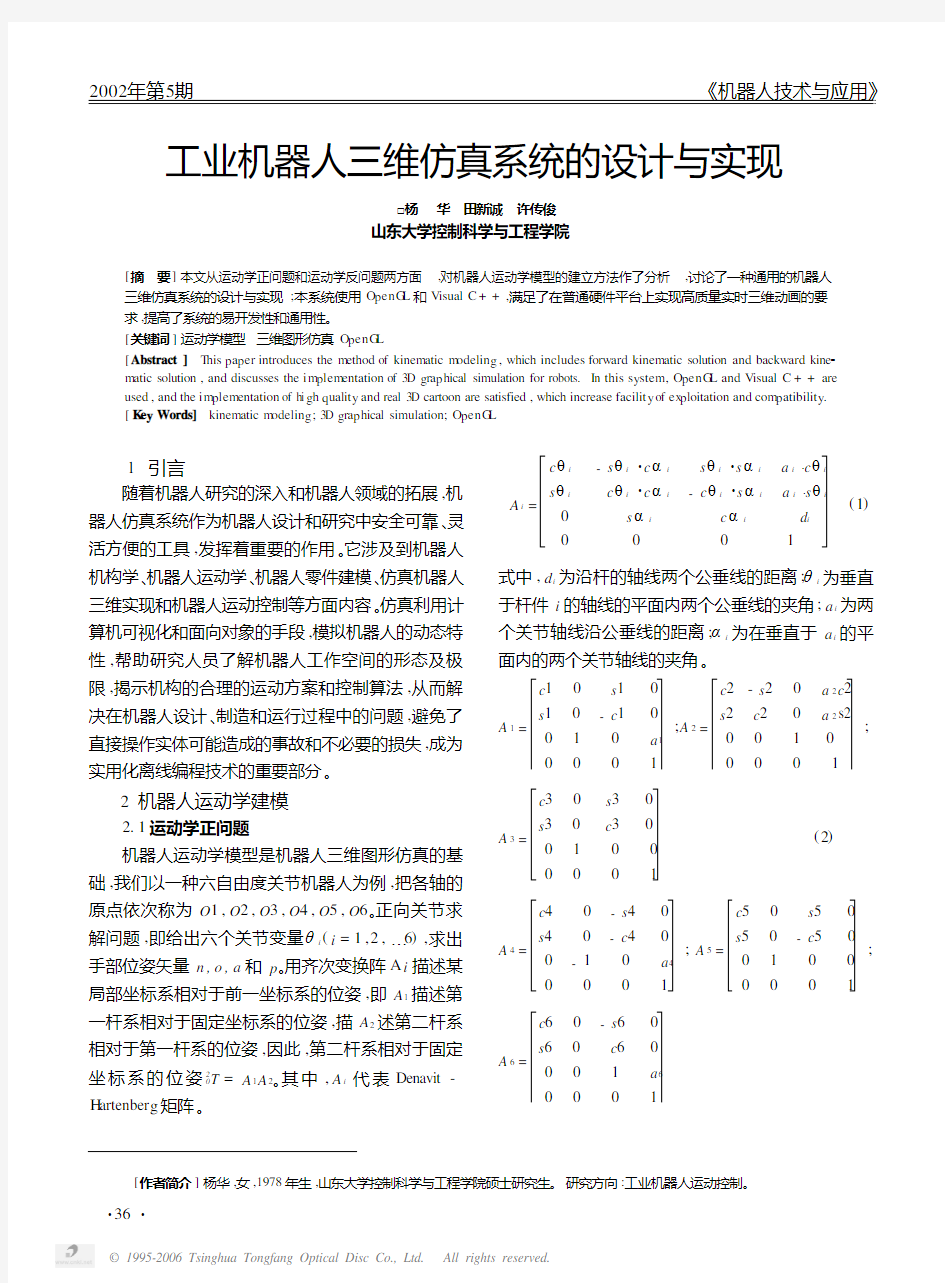
2002 年第 s 期《辊暑入技术与应用》口杨华田新诚许传俊山东大学控制科学与工程学院 [ 摘要】本文从运动学正问题和运动学反问题两方面,对机器人运动
学模型的建立方法作了分析,讨论了一种通用的机器人三维仿真系统的设计与实现;本系统使用 OpenCL 和 VisualC++ ,满足了在普通硬件平台上实现高质量实时三维动画的要求,提高了系统的易开发性和通用性。【关键词】运动学模型三维图