第三章自适应数字滤波器
3.1 引言
3.2 自适应横向滤波器
3.3 自适应格型滤波器
3.4 最小二乘自适应滤波
3.5 自适应滤波的应用
3.1 引言
(维纳滤波器的特点与不足)自适应数字滤波器和维纳滤波器一样,都是符合某种准则的最佳滤波器。维纳滤波器的参数是固定的,适用于平稳随机信号的最佳滤波,但要设计这种滤波器,必须要求输入信号是平稳的,且具有信号和噪声统计分布规律的先验知识。在实际中,常常无法知道这些先验知识,且统计特性还会变化,因此实现最佳滤波是困难的。
自适应滤波器的特点是:滤波器的参数可以自动地按照某种准则调整到最佳滤波;实现时不需要任何关于信号和噪声的先验统计知识,尤其当输入统计特性变化时,自适应滤波器都能调整自身的参数来满足最佳滤波的需要。常常将这种输入统计特性未知,调整自身的参数到最佳的过程称为“学习过程”。将输入信号统计特性变化时,调整自身的参数到最佳的过程称为“跟踪过程”,因此自适应滤波器具有学习和跟踪的性能。由于自适应滤波器有这些特点,自1967年威德诺(B. Widrow)等人提出自适应滤波
器以来,在短短十几年中,自适应滤波器发展很快,已广泛地用于系统模型识别,通信信道的自适应均衡,雷达与声纳的波束形成,减少或消除心电图中的周期干扰,噪声中信号的检测、跟踪、增强和线性预测等。
本章主要介绍自适应横向滤波器、自适应格型滤波器、最小二乘自适应滤波器以及自适应滤波器的应用举例。
3.2 自适应横向滤波器
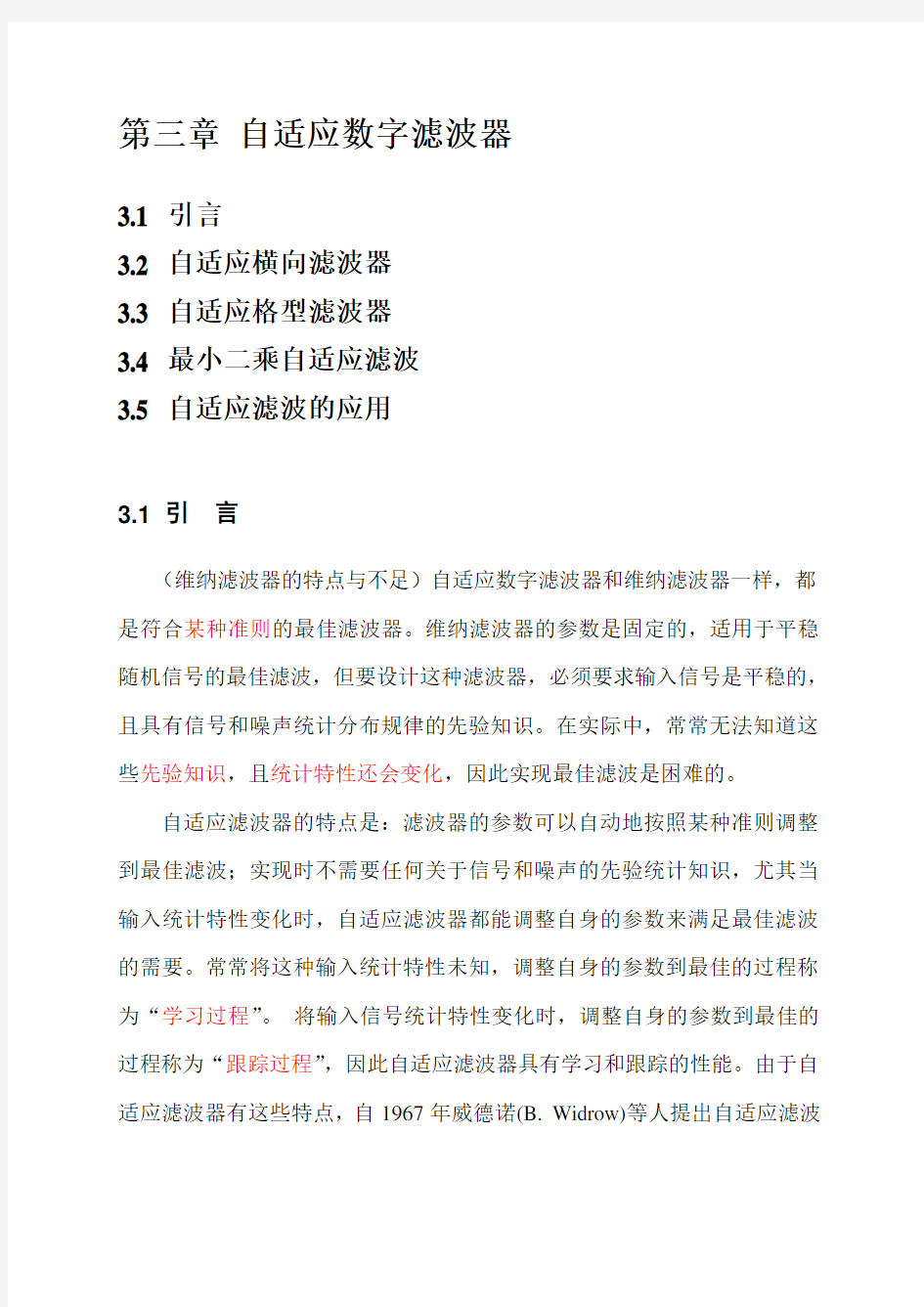
自适应滤波器的原理框图如图 3.2.1所示,图中()x n 称为输入信号,
()y n 是输出信号,()d n 称为期望信号,或者称为参考信号、训练信号,()
e n 是误差信号。其中
()()()e n d n y n =-
自适应滤波器()H z 的系数根据误差信号,通过一定的自适应算法,不断地进行改变,使输出()y n 最接近期望信号
()d n 。这里暂时假定()d n 是可以利用的,实际中,()d n 要根据具体情况进
行选取,能够选到一个合适的信号作为期望信号,是设计自适应滤波器的一项有创意的工作。如果真正的()d n 可以获得,我们将不需要做任何自适应滤波器。
自适应线性组合器和自适应FIR 滤波器是学习自适应信号处理的基础,它们都是非递归型的,相对地说,容易分析和理解,我们首先由此展开对自适应滤波基础理论的讨论。
图3.2.1 自适应滤波器原理图
3.2.1 自适应线性组合器和自适应FIR 滤波器
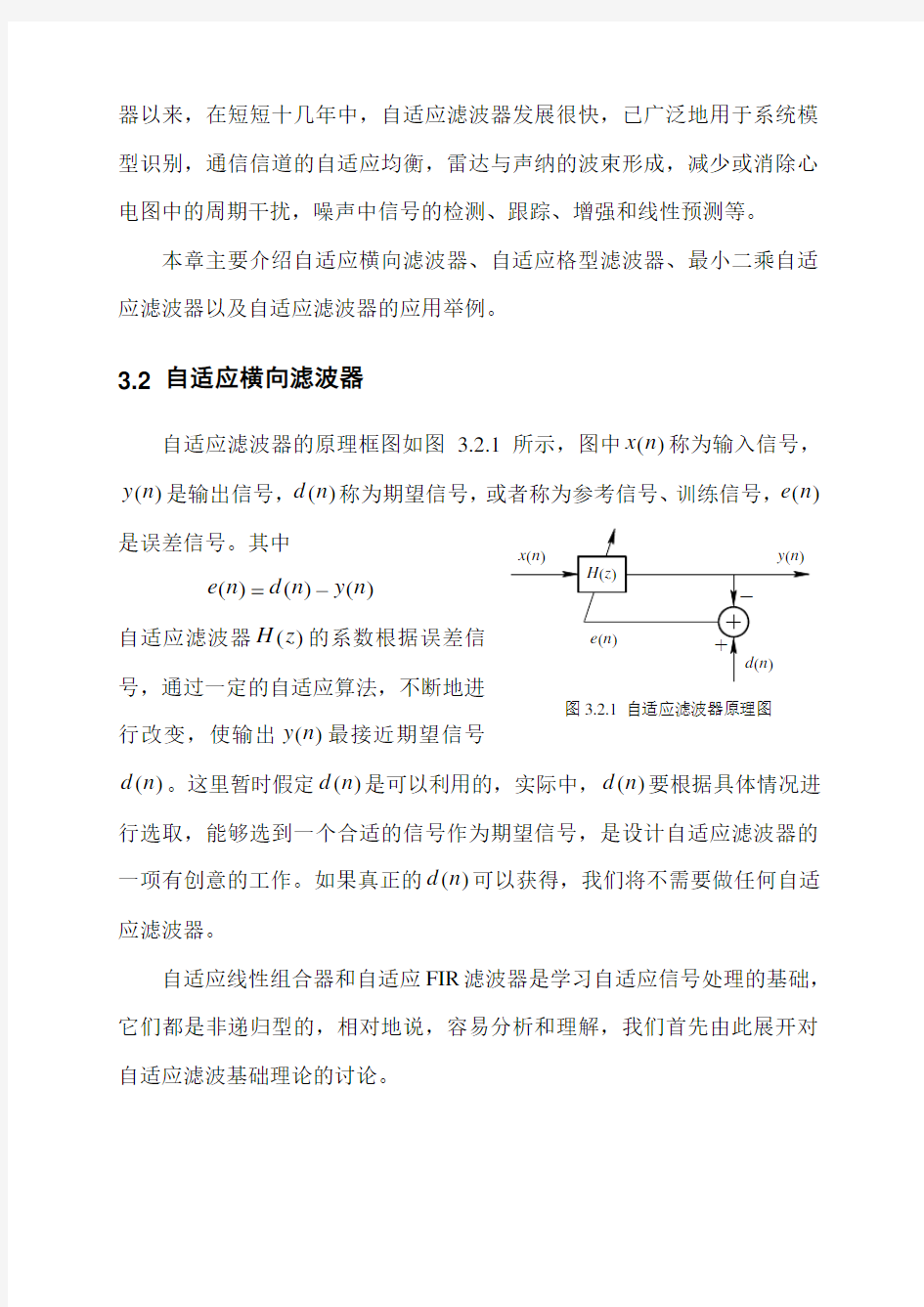
1. 自适应滤波器的矩阵表示式 图3.
2.2表示的是一个有N 个权系数的自适应线性组合器,图中N 个权系数12,,,N w w w L 受误差信号j e 的自适应控制。对于固定的权系数,输出j y 是输入信号
12,,,j j N j x x x L 的线性组合,因此
称它为线性组合器。这里的12,,,j j N j x x x L 可以理解为是从N 个不同的信号源到达的瞬时输入,是一个多输入系统,也可以是同一个信号源的N 个序贯样本,如图 3.2.3 所示。
z -1
z -1
x (n -1)
x (n -2)
x (n -N )
z -1
d (n )
e (n )
+-
y (n )
…x (n )
w 2w 3
w N -1
w N
w 1
图3.2.3 自适应FIR 滤波器
因此它是一个单输入系统, 实际上这种单输入系统就是一个FIR 网络结构,或者说是一个自适应横向滤波器。其输出()y n 用滤波器的单位脉冲相应表示成下式:
1
()()()N m y n w m x n m -==-∑ (3.2.1)
x 1j x 2j
x Nj
?-
d j
e j
y j
w 1
w 2
w N
+
-
图 3.2.2 自适应线性组合器
这里()w n 称为滤波器单位脉冲响应,令:1i m =+,记(1)i w w i =-,
(1)i x x n i =-+,n 用j 表示,上式可以写成
1N
j i i j i y w x ==∑ (3.2.2)
这里i w 也称为滤波器加权系数。用上面公式表示其输出,适合于自适应线性组合器,也适合于FIR 滤波器。将上式表示成矩阵形式:
T T
j j
j y ==X W W X (3.2.3) 式中,T T 1212[,,,],[,,,]N j j j N j w w w x x x ==W X L L
误差信号表示为
T T
j j j j j j
j e d y d d =-=-=-X W W X (3.2.4) 2. 利用均方误差最小准则求最佳权系数和最小均方误差
误差信号被用来作为权系数的控制信号。下面采用均方误差最小的准则,求最佳权系数。由(3.2.4)式,均方误差为
22[][()]j j j
E e E d y =- 2T T T
[]2[][]j j j j j E d E d E =-+X W W X X W (3.2.5)
令
12[][,,,]T dx j j j j j j j Nj E d E d x d x d x ==R X L (3.2.6)
21121211212
12[]j
j j
j N j j j
j j N j T xx j j N j j
N j j
N j x x x x x x x x x x E E
x x x x x ??
?
???
==????????
R X X L L M M O M L
(3.2.7) 将(3.2.6)、(3.2.7)式代入(3.2.5)式,得到
22T T
[][]2j j dx
xx E e E d =-+R W W R W (3.2.8)
dx R 称为j d 与j X 的互相关矩阵,是一个N 维列矩阵;xx R 是输入信号的自
相关矩阵,特点如下:
(1) 是对称矩阵,即T xx xx =R R ;
(2) 是正定或半正定的,因为对于任意矢量V 满足下式:
T T T 2[][||||]0T xx E E ==≥V R V V XX V X V
自相关矩阵主对角线是输入信号的均方值,交叉项是输入信号的自相关值。
(3.2.8)式表明,当输入信号和期望信号是平稳随机信号时(即dx R 和xx
R 为常数),均方误差信号2[]j E e 是权系数的二次函数,即将(3.2.8)式展开时,公式中的权系数均以它的一次幂或二次幂出现。如果只有一个权系数1w ,
则2[]j E e 是1
w 的口向上的抛物线;如果有两个权系数12,w w ,则2
[]j E e 是它们的口向上的抛物面;对于两个权系数以上的情况,则属于超抛物面性质。
2[]j E e 在自适应信号处理中是一个重要的函数,经常称它为性能函数。
为选择权系数,使性能函数到达它的最小点,一些有用的自适应方法都是
基于梯度法的,我们用j ?表示2[]j E e 的梯度向量,它是用2
[]j E e 对每个权系
数求微分而形成的一个列向量,用公式表示如下:
T
2
221
2[][][],,,
j j j
j N E e E e E e
w w w ??
????=?????????
L (3.2.9) 按照(3.2.4)式:T j j j e d =-W X ,梯度推导如下:
122,,,2[]T
j j j j j j j N e e e E e E e w w w ??
????????==- ??????????X L (3.2.10)
还可以用(3.2.8)式:22T T
[][]2j j dx
xx E e E d =-+R W W R W 对W 求导得到 22j xx dx ?=-R W R (3.2.11)
令上式等于0,得到最佳权矢量*W 的表达式:
*1
xx dx -=W R R (3.2.12)
对比第二章维纳滤波器的最佳解,结果是一样的。上式也称为维纳权矢量。当自适应滤波器的权系数满足上式时,均方误差将取最小值。将(3.2.12)式代入(3.2.8)式得到最小均方误差:
22min 2
[][]2[]2()T T j j dx xx
T d xx T j x
E e E d E d ***
**
*=-+=-+R W W R W R W W W
R
2[]T j dx
E d *
=-R W (3.2.13) 或者将上式取转置,用下式表示:
22min [][]T j j
dx E e E d *=-W R (3.2.14) 比较式(3.2.13)和(3.2.14)可知,T T
dx
dx **=R W W R ,这是因为它们都是常数。
我们知道,在维纳滤波器中,当滤波器的单位脉冲响应取最佳值时,其误差信号和输入信号是正交的;这里也有相同的结果,当权矢量取最佳值时,梯度为0,按照(3.2.10)式:2[]j j j E e ?=-X
2[]0j j j E e ?=-=X
上式表明,权系数取最佳值时,误差信号与输入信号是正交的,即仍然服
从正交原理。也可以根据正交原理推导出维纳解(3.2.12)式:*1
xx dx -=W R R 。
上式关于自适应滤波器的结论适合于随机信号的自适应滤波器,也适合与确定性信号的自适应滤波器,但对于随机信号取统计平均的地方,确定性信号必须用时间平均代替。为了说明自适应滤波器基本原理,下面举一个确定性信号自适应滤波器的例子。
例 3.2.1 一个单输入的二维权矢量自适应滤波器如图3.2.4所示,图中输入信号与期望信号分别为
2π
2πsin ,2cos j j x j d j N N
????
==
? ?????
这两个信号都是周期性确定性
信号,因为任何正弦函数积的期望值,都可由这个积在一个或多个周期上作时间平均来计算,可以推导出下面公式[6]:
11112π2π12π
[]sin sin ()cos 0,1222π2π2π
[]cos sin ()sin 0,142π2π2π
[]cos cos ()2cos 0,1
N j j n j N j j n j N j j n j E x x j j n n
n N N N N E d x j j n n
n N N N N E d d j j n n
n N N N N
-=-=-==-===-=-==-==∑∑∑ 2
12
1121cos
0.52cos 1j
j j xx j j
j x x x N E x x x N ππ---?
?
????
==????????
??
???
?
R T
T 12[,]0,sin dx j j j j E d x d x N π-?
?==-???
?R
22T T
11122222
12122[][]22π1cos
2π20.5[]20sin 2πcos 12π2π0.5()cos 2sin 2
j j dx
xx E e E d w w N w w w w N N w w w w w N N
=-+?
?
????
????=+--?
??????????????????
?
=++++R W W R W
上式表明性能函数2[]j E e 对权函数是二次型的,用(3.2.11)式求其梯度向量,
图 3.2.4 两个权的自适应滤波器
得到
121212
222π2π01cos
cos 22π2π2π2πsin cos 1cos 2sin j xx dx
w w w N N
w w w N N N N ?=-??
??+??????????=-=?
??
?????-??????++???????
???
R W R 求最佳权矢量可以用(3.2.12)式:*1
xx dx -=W R R ,通过对xx R 求逆得到,
也可以通过上式,令0j ?=,而求出:
T
T
1
22π2π[]2cot
2csc w w N N *??
==-????
W
用(3.2.13)式求最小均方误差:
22T min
2π2cot 2π[][]20sin 02π2csc j j dx N E e E d R N N *
?
?????=-=--=????????
-????
W
上式说明只要2N >,不管N 取多少,通过对权系数的调整可使均方误差达到0,此时输出信号j y 完全等于期望信号j d ,例如4N =,按照上面公式,可以求出输入、输出信号以及最佳权系数如下:
T
12121[][02]πsin(
)2
π2cos()
2
π
2cos()
2
j j j j j w w w x j y w x w x j d j ***
-==-==+==
可以看出j y 和j d 相同。
3.2.2 性能函数表示式及其几何意义
在自适应滤波器的分析研究中,性能函数是一个重要函数,前面已推导出性能函数用(3.2.8)式表示,现重写如下:
22[][]2j j E e E d =-T T
dx
xx R W +W R W 下面我们推导它的其它表示方法以及几何意义。
均方误差是权系数的二次函数,当权系数取最佳值时,均方误差取得最小值,将(3.2.14)式代入(3.2.8)式,可以用最小均方误差表示性能函数,推导如下:
为了表示方便,令2[]j E e ζ=,那么由式(3.2.14)可知:
22T
min
[][]j j dx E d E e *=+W R ,则 2T
min T []2T j xx dx dx
E e ξξ*==+-+R W W R R W W 将(3.2.12)式代入上式,得到
T min T
m n T T
i [][]T x T xx x x T
T
x x x xx xx ξξξ****
***=++=+-----W R W W R W W W R W
W W R W W W R R W W
T min ()()xx ξ**=+--W W R W W (3.2.15)
其中,T T xx xx **=W R W W R W ,成立的条件是T xx *W R W 是标量。令
*1N T 2V =W -W =[v ,v ,,v ]L (3.2.16)
其中,V 称为偏差权向量,它表示权向量对最佳权向量的偏差。这样性能函数可以表示得更简单:
T min xx ξξ=+V R V (3.2.17)
因为xx R 是对称的,正定或半正定的,利用它的特征值和特征向量再进一步简化,假设xx R 是N N ?维,它的N 个特征值为:12,,,N λλλL ,将xx
R
进行正交分解,得到
T xx =R Q ΛQ ,其中,T xx Λ=Q R Q (3.2.18)
通过调节使Q 归一化,即
-T T 1Q Q =I,Q =Q (3.2.19)
111212122212N N N N NN q q q q q q q q q ??????
=????????
12N Q =[q ,q ,,q ]L L L M M
M L (3.2.20) 式中,Q 称为正交矩阵或特征矩阵,i q 称为特征向量,满足下式:
10i j
i j
=?=?
≠?T i
j q q (3.2.21) 1,2,,i N =xx i i i
R q =λq L (3.2.22)
Λ是由特征值组成的对角矩阵,用下式表示:
12Diag(,,,)N λλλ=ΛL (3.2.23)
将(3.2.18)式代入(3.2.17)式,得到
min ξξ=+T T V Q ΛQ V
令
v v v '''''T 1
2N T V =Q V =[,,,],V =QV L (3.2.24) 则
min ξξ''=+T V ΛV
2min 1N
i i i v ξλ='=+∑ (3.2.25)
上式将性能函数变成了平方和的形式。再观察(3.2.24)式,该式将V 坐标中的xx R 的特征向量变成了'V 坐标中的单位向量。利用(3.2.24)式将特征
向量i q 变成'i q ,再利用(3.2.20)、(3.2.21)式,可得
T
,[0,,1,,0]'=T T i i 1i N i
q =Q q =[q ,q ,,q ]q L L L L (3.2.26) 可以理解为
''?=?=?=T T T xx i i i i i i i i i i i i R q =λq Q ΛQ q λq ΛQ q λQ q Λq λq 。
也就是说,'i q 为'V 坐标中的第i 个单位向量,'i q 亦是Λ矩阵对应于i
λ的特征向量。下面用二维权矢量的情况说明它的几何意义。对于二维权矢量情况,有下面公式:
1122,w v w v *
????==????????
W V =W -W
(0)(1)(1)(0)xx xx xx xx xx r r r r ??
=??
??
R T min 22min 1
122
()()
(0)2(1)(0)xx xx xx xx r v r v v r v
ξξξ**=+=+++W -W R W -W
式中,(0)0xx r >。显然,这是一个口向上的抛物面,如图3.2.5所示,V 坐标相当于将坐标原点移动W 坐标的最佳点*W ,如果用性能函数等于常数的不同平面(平行于W 坐标平面)去切割抛物面,投影在W 坐标平面,便得到一族同心椭圆,如图3.2.6所示。
图 3.2.5 二维权矢量性能表面
图 3.2.6 等均方误差的椭圆曲线族
按照(3.2.17)式:T min xx ξξ=+V R V ,有
min c ξ+=T xx V R V
或 1c =T xx V R V
当min c ζ=时,对应椭圆的中心,*V =W -W ,则相当于W 坐标平移到V 坐标的原点,即V 坐标的原点对应W 坐标的最佳点*W 。这里,12,v v 不是椭圆的主轴。但经过对xx R 的分解:
1200λλ??
=??
??
T
xx Q R Q =Λ 且'T V =Q V 将性能函数的椭圆族(按照(3.2.25)式)变成
1c ''=T V ΛV
即
2211
221v v c λλ''+= 或者
22121112
1//v v c c λλ''+= (3.2.27) 显然,上式是一个椭圆方程,1
v '和2v '是椭圆族的主轴,如果12λλ<,则1
v '是长轴,2v '是短轴。因此(3.2.24)式起坐标旋转的作用,将12,v v 旋转到主轴上,形成1
2,v v ''主轴。对于维数2N >的情况,长轴对应最小特征值,按
照上面的椭圆方程长轴正比于1/
;短轴对应于最大特征值,正比于
1/
v v v ''''T 1
2N T V =Q V =[,,,]L 得到
112212[,,,][,,,]N N N v v v v v v '''=q q q L L (3.2.28)
'V 中单位矢量对应就是V 坐标中的xx R 的特征矢量。
3.2.3 最陡下降法
我们知道,自适应过程的最终目的是要寻找最佳权系数。按照(3.2.12)
式:*1
xx dx -=W R R ,
要预先求得互相关函数和自相关函数,还要计算矩阵的逆,这样在实际应用中便遇到了很大的困难。下面介绍最佳权系数的搜索方法。
前面已经学习过,当输入信号和期望信号都是平稳随机信号时,均方误差函数是权系数的二次函数,二次函数的参数却是未知的,但是可以在一段时间中,根据误差函数的平方求平均,估计出在误差性能函数上的位置。由此出发,可以得到不同的搜索性能表面函数并寻找最佳值的方法或算法,这里有两种熟知的搜索方法,它们是牛顿法和最徒下降法。牛顿法常常难以实现,但具有重要的数学意义[2];最陡下降法已经工程实现,并已证明是在广泛的实际应用中有价值的一种方法。本书仅介绍最陡下降法[1-3]。
威德诺(Widrow )等人于1959年提出最陡下降法(Steepest Descent Method )的算法,按照这一算法,最陡下降法权矢量的改变用下式表示:
()μ+-?j+1j j W =W (3.2.29)
式中,μ是调整步长的常数,它控制着系统的稳定性和自适应的收敛速度。上面公式表示下一个权矢量j+1W 等于现在的权矢量j W 加上一个正比于负梯度的变化量,因为梯度的方向是性能函数增加最快的方向,负梯度的方向就是性能函数减小最快的方向,因此称为最陡下降法。下面按照上式来推导最陡下降法的递推公式、收敛条件以及它的过渡特性。
1. 最陡下降法的递推公式
将(3.2.11)式代入(3.2.29)式,得到
(22)μ+j+1j dx xx j W =W R -R W (3.2.30)
[2]2xx j I μμ*=-+xx R W R W (3.2.31)
在上式两边都减去*W ,并令*j j V =W -W ,得到
[2]xx I μ=-j+1j V R V (3.2.32)
上式是一个递推公式,由于[]g 项不是对角矩阵,计算与分析均复杂。下面仍然采用坐标旋转的方法进行推导。
''
T -1-1xx xx -1
j j j j R =Q ΛQ =Q ΛQ ,Λ=Q R Q V =Q V ,V =QV
1122(2μμμ++''
=-=-'
=--1-1-1j j xx j xx j -1
-1
xx j V =Q V Q [I R ]V Q [I R ]QV Q IQ Q R Q)V
(2)μ'=-Λj I V (3.2.33)
此时[]g 项已变成对角矩阵,假设起始值是0'V ,可得到上式的递推解为
0(2)j μ''=-j V I ΛV (3.2.34)
再将(3.2.24)式:''T V =Q V,V =QV 代入,再经过坐标平移,即代入
*j j V =W -W 式, 最后得到权系数的递推公式:
00
22j
μμ****=+=+=+-''-j j j j T V QV (I ΛW =W +W W Q W Q(I Λ))V Q V
2μ**=+-0j T W Q(I Λ)(W -W Q ) (3.2.35)
上面递推公式中,[]g 部分已变成对角矩阵,这使分析与研究自适应特性变得简单了。
2. 收敛条件
由最陡下降法的递推公式不难分析出它的收敛条件,即当迭代次数j 趋于∞时,权系数收敛最佳时的条件。按照上式,显然只有当
lim[2]j j μ→∞
-=I Λ0 (3.2.36)
|12|11,2,,|21|112111
0220i i i i i
i N μλμλμλμλμλ-<=?-
L max
1
0μλ<<
(3.2.37)
满足时,才能得到:lim j *→∞
j W =W 。(3.2.37)式即是最陡下降法的收敛条件,式中max λ是xx R 的最大特征值。(3.2.36)式中的0表示0矢量。
3. 过渡过程
过渡过程是指权矢量和性能函数由起始点随迭代次数的增加,进行变化的过程。下面从权矢量和性能函数两方面讨论自适应滤波器的过渡过程。权矢量的过渡过程讨论如下:
按照(3.2.34)式,权矢量的递推解是
0(2)j μ''=-j V I ΛV
第i 个权系数递推方程是
(12)j ji i i v v μλ''=- (3.2.38) 令
1
12e
1,2,3,,i
τi i N μλ-
-==L (3.2.39)
将上式代入(3.2.38)式,得到
10
e 1,2,3,,i
τji i v v i N -
''==L (3.2.40)
上式说明第i 个分量ji v '按指数规律变化,其时常数为
1
1,2,3,,1(12)
i i i N n τμλ==--
L (3.2.41)
因为一般μ取得比较小(ln(1),0x x x -≈-?→),可以近似为
11,2,3,,2i i
i N τμλ≈
=L (3.2.42)
因为
'111121'212222'12j N N j jN N N NN v q q q q q q v v q q q ??
??????????=????????????????
'
j j V =QV L L M M L
M M L 所以
1
N
ji ik jk k v q v ='=∑
再将(3.2.40)式代入,得到
1
i
j
N
ji ik k k v q v e τ-
='=∑ (3.2.43)
1
e
k
j N
τji i ik k w w c -*==+∑ (3.2.44)
式中
ik ik k c q v '= (3.2.45) 上式说明第i 个加权系数按照N 个指数和的规律变化,由初始值收敛到最佳值,其时常数k τ与特征值k λ成反比。下面分析性能函数的过渡过程。按照(3.2.25)式,性能函数如下式:
2
2min 1
[]N
j
i ji i E e v ξλ='=+∑ (3.2.46)
将(3.2.40)式代入,得到
222min
01[]i
j
N
j i i i E e v e τξλ-='=+∑ (3.2.47)
上式说明性能函数也是按N 个指数和的规律变化,和加权系数过渡过程不同的是时间常数不同,它的时常数为
imse 12
4i
i
ττμλ=
≈
(3.2.48)
我们已经知道,性能函数和各个加权系数都是按照N 个具有不同时常数的指数和的规律变化的,时常数和特征值成反比,不同的特征值对应的收敛时间是不一样的,但最终的收敛要取决于最慢的指数过程,它的时常数最大,对应最小的特征值,公式如下:
max min
12τμλ=
(3.2.49) mse max min
1
4τμλ=
(3.2.50)
但为保证收敛,μ不能取得太大,受限于最大特征值max λ。这样,如果特征值比较分散时,即max λ和min λ相差很大时,使最陡下降法的收敛性能很差。下面分析μ值的影响。
μ值收敛过程影响很大,首先必须选择得足够小,使之满足收敛条件:
max
1
0μλ<<
但按照(3.2.47)、(3.2.48)式,它影响收敛速度。一般希望在保证收敛的条件下,选大一些,使时间常数小一些,收敛的速度快一些。但当μ选择得太大时,即使收敛条件满足,也可能形成振动性的过渡特性。在图3.2.7中,图(a)是μ较小时的情况;图(b )是μ较大时的情况,此时过渡过程已发
生振荡。
(a )
(b
)
w (0)
图 3.2.7μ值的影响
(a )μ较小时的情况;(b )μ较大时的情况
3.2.4 最小均方(LMS)算法
上面研究的最陡下降法是自适应滤波具体算法的基础,按照(3.2.29)式控制加权系数可以收敛到它的最佳状态。但是需要求出其梯度的精确值,要求输入信号和期望信号平稳,且按照(3.2.11)式首先要估计自相关函数
xx R 和互相关函数dx R ,这给具体实现带来很大的困难。Widrow 等人提出
的最小均方算法,是用梯度的估计值代替梯度的精确值,这种算法简单易行,因此获得了广泛的应用,下面进行介绍。
1. LMS 算法的权值计算
LMS (Least Mean Square) 算法的梯度估计值用一条样本曲线进行计算,公式如下:
2
2221
2
?j j j
j j N e e e e w w w ??????????=?=???????
??
L
(3.2.51) 因为
j j e d =-T j W X
所以
T
12
,,,j j
j N e e e w w w ?????=-???????j X L
?2j j e ?=-j
X (3.2.52) ?()2j e μμ+-?=+j+1j j j j
W =W W X (3.2.53) FIR 滤波器中的第i 个权系数的计算公式为
1,,,21,2,3,
,j i j i j j i
w w e x i N μ+=+=&L (3.2.54) FIR 滤波器中的第i 个权系数的控制电路如图3.2.8所示, LMS 自适应滤波器的总框图如图 3.2.9 所示。
图 3.2.8 FIR 第i 个支路的控制电路
LMS 算法的加权系数按照(3.2.53)式进行控制,式中加权矢量的改变量是2j e μj X ,梯度的估计值是2j e -j X 。显然,这是一个随机变量,这说明LMS 算法的加权矢量是随机变化的。因此,LMS 算法又称为随机梯度法。下面对这种算法的性能进行分析,主要分析加权矢理和性能函数的平均变化规律以及它们的随机性造成的影响。
按照(3.2.52)式,对梯度估计值求统计平均,得到
?[]2[]j j j j
E E e X ?=-=? (3.2.55) 上式说明梯度估计值是无偏估计的,梯度的估计量在理想梯度j ?附近随机变化,权系数也是在理想情况下的权轨迹附近随机变化的。
图 3.2.8 LMS 自适应滤波器总计算框图
2. LMS 算法加权矢量的过渡过程 将误差公式(
3.2.4)式代入(3.2.53)式,得到
2()
2()
j j d d μμ+-=+-T j+1j j j j T
j j j j
j W =W X X W W X X X W
[22j d μμ=-+T j j j j I X X ]W X (3.2.56)
如果对上式取统计平均,关系到j X 和j W 之间的相关性问题。按照上式递推,j W 和1-j X ,这样就与j X 和1-j X 的关联性有关。如果按照(3.2.53)式计算权矢量,经过若干步之后,才调整一次权矢量,可以认为j W 和j X 不相关;但如果每一次迭代后,都改变一次权系数,问题较复杂,如果信号j X 变化很快,使j X 和1-j X 不相关,j W 和1-j X 有关,就得到j W 和j X 无关的结论。或者μ值取得很小,每一次迭代权矢量的变化量很小,j W 相对j X 变化慢得多,这种情况下,j W 和j X 之间的相关性很小,可以认为j W 和j X 不相关。另外,为了分析简单,可假设j W 和j X 不相关,按照(3.2.53)式,对加权矢量取统计平均:
目录 1.题目.......................................................................................... .2 2.要求 (2) 3.设计原理 (2) 3.1 数字滤波器基本概念 (2) 3.2 数字滤波器工作原理 (2) 3.3 巴特沃斯滤波器设计原理 (2) 3.4脉冲响应不法 (4) 3.5实验所用MA TLAB函数说明 (5) 4.设计思路 (6) 5、实验内容 (6) 5.1实验程序 (6) 5.2实验结果分析 (10) 6.心得体会 (10) 7.参考文献 (10)
一、题目:巴特沃斯数字低通滤波器 二、要求:利用脉冲响应不变法设计巴特沃斯数字低通滤波器,通带截止频率100HZ,采样频率1000HZ ,通带最大衰减为0.5HZ ,阻带最小衰减为10HZ ,画出幅频、相频相应相应曲线。并假设一个信号x(t)=sin(2*pi*f1*t)+sin(2*pi*f2*t),其中f1=50HZ,f2=200HZ 。用此信号验证滤波器设计的正确性。 三、设计原理 1、数字滤波器的基本概念 所谓数字滤波器,是指输入、输出均为数字信号,通过数值运算处理改变输入信号所含频率成分的相对比例,或者滤波器除某些频率成分的数字器件或程序,因此,数字滤波的概念和模拟滤波相同,只是的形式和实现滤波方法不同。正因为数字滤波通过数值运算实现滤波,所以数字滤波处理精度高、稳定、体积小、质量轻、灵活、不存在阻抗匹配问题,可以实验模拟滤波器无法实现的特殊滤波功能。如果要处理的是模拟信号,可通过A\DC 和D\AC,在信号形式上进行匹配转换,同样可以使用数字滤波器对模拟信号进行滤波。 2、数字滤波器的工作原理 数字滤波器是一个离散时间系统,输入x(n)是一个时间序列,输出y(n)也是一个时间序列。如数字滤波器的系统函数为H(Z),其脉冲响应为h(n),则在时间域内存在下列关系 y(n)=x(n) h(n) 在Z 域内,输入输出存在下列关系 Y(Z)=H(Z)X(Z) 式中,X(Z),Y(Z)分别为输入x(n)和输出y(n)的Z 变换。 同样在频率域内,输入和输出存在下列关系 Y(jw)=X(jw)H(jw) 式中,H(jw)为数字滤波器的频率特性,X(jw)和Y(jw)分别为x(n)和y(n)的频谱。w 为数字角频率,单位rad 。通常设计H(jw)在某些频段的响应值为1,在某些频段的响应为0.X(jw)和H(jw)的乘积在频率响应为1的那些频段的值仍为X(jw),即在这些频段的振幅可以无阻碍地通过滤波器,这些频带为通带。X(jw)和H(jw)的乘积在频段响应为0的那些频段的值不管X(jw)大小如何均为零,即在这些频段里的振幅不能通过滤波器,这些频带称为阻带。 一个合适的数字滤波器系统函数H(Z)可以根据需要输入x(n)的频率特性,经数字滤波器处理后的信号y(n)保留信号x(n)中的有用频率成分,去除无用频率成分。 3、巴特沃斯滤波器设计原理 (1)基本性质 巴特沃斯滤波器以巴特沃斯函数来近似滤波器的系统函数。巴特沃斯滤波器是根据幅频特性在通频带内具有最平坦特性定义的滤波器。 巴特沃思滤波器的低通模平方函数表示1 () ΩΩ+ =Ωc N /22 a 11 ) (j H
数字滤波器的MATLAB设计与实现 数字滤波器的MATLAB设计与实现 类别:电子综合 引言 随着信息时代和数字世界的到来,数字信号处理已成为今一门极其重要的学科和技术领域。数字信号处理在通信、语音、图像、自动控制、雷达、军事、航空航天、医疗和家用电器等众多领域得到了广泛的应用。在数字信号处理应用中,数字滤波器十分重要并已获得广泛应用。 1 数字滤波器的设计1.1 数字滤波器设计的基本步骤数字滤波器根据其冲激响应函数的时域特性,可分为两种,即无限长冲激响应(IIR)滤波器和有限长冲激响应(FIR)滤波器。IIR滤波器的特征是,具有无限持续时间冲激响应。种滤波器一般需要用递归模型来实现,因而有时也称之为递归滤波器。FIR滤波器的冲激响应只能延续一定时间,在工程实际中可以采用递归的方式实现,也可以采用非递归的方式实现。数字滤波器的设计方法有多种,如双线性变换法、窗函数设计法、插值逼近法和Chebyshev逼近法等等。随着MATLAB软件尤其是MATLAB的信号处理工作箱的不断完善,不仅数字滤波器的计算机辅助设计有了可能,而且还可以使设计达到最优化。数字滤波器设计的基本步骤如下:(1)确定指标在设计一个滤波器之前,必须首先根据工程实际的需要确定滤波器的技术指标。在很多实际应用中,数字滤波器常常被用来实现选频操作。因此,指标的形式一般在频域中给出幅度和相位响应。幅度指标主要以两种方式给出。第一种是绝对指标。它提供对幅度响应函数的要求,一般应用于FIR滤波器的设计。第二种指标是相对指标。它以分贝值的形式给出要求。在工程实际中,这种指标最受欢迎。对于相位响应指标形式,通常希望系统在通频带中人有线性相位。运用线性相位响应指标进行滤波器设计具有如下优点:①只包含实数算法,不涉及复数运算;②不存在延迟失真,只有固定数量的延迟;③长度为N 的滤波器(阶数为N-1),计算量为N/2数量级。因此,本文中滤波器的设计就以线性相位FIR滤波器的设计为例。(2)逼近确定了技术指标后,就可以建立一个目标的数字滤波器模型。通常采用理想的数字滤波器模型。之后,利用数字滤波器的设计方法,设计出一个实际滤波器模型来逼近给定的目标。(3)性能分析和计算机仿真上两步的结果是得到以差分或系统函数或冲激响应描述的滤波器。根据这个描述就可以分析其频率特性和相位特性,以验证设计结果是否满足指标要求;或者利用计算机仿真实现设计的滤波器,再分析滤波结果来判断。 1.2 滤波器的MATLAB设计(1)MATLAB MATLAB是一套用于科学计算的可视化高性能语言与软件环境。它集数值分析、矩阵运算、信号处理和图形显示于一体,构成了一个界面友好的用户环境。它的信号处理工具箱包含了各种经典的和现代的数字信号处理技术,是一个非常优秀的算法研究与辅助设计的工具。在设计数字滤波器时,通常采用MATLAB来进行辅助设计和仿真。(2)FIR滤波器的MATLAB设计下面以设计线性相位FIR滤波器为例介绍具体的设计方法。线性相位FIR滤波器通常采用窗函数法设计。窗函数法设
IIR 数字滤波器设计原理 利用双线性变换设计IIR 滤波器(只介绍巴特沃斯数字低通滤波器的设计),首先要设计出满足指标要求的模拟滤波器的传递函数)(s H a ,然后由)(s H a 通过双线性变换可得所要设计的IIR 滤波器的系统函数)(z H 。 如果给定的指标为数字滤波器的指标,则首先要转换成模拟滤波器的技术指标,这里主要是边界频率 s p w w 和的转换,对s p αα和指标不作变化。边界频率的转换关系为)21tan(2w T =Ω。接着,按照模拟低通滤波器的技术指标根据相应 设计公式求出滤波器的阶数N 和dB 3截止频率c Ω;根据阶数N 查巴特沃斯归一 化低通滤波器参数表,得到归一化传输函数 )(p H a ;最后,将c s p Ω=代入)(p H a 去归一,得到实际的模拟滤波器传输函数)(s H a 。之后,通过双线性变换法转换公式 11 112--+-=z z T s ,得到所要设计的IIR 滤波器的系统函数)(z H 。 步骤及内容 1) 用双线性变换法设计一个巴特沃斯IIR 低通数字滤波器。设计指标参数为: 在通带内频率低于π2.0时,最大衰减小于dB 1;在阻带内[]ππ,3.0频率区间上,最小衰减大于dB 15。 2) 以π02.0为采样间隔,绘制出数字滤波器在频率区间[]2/,0π上的幅频响应特 性曲线。 3) 程序及图形 程序及实验结果如下: %%%%%%%%%%%%%%%%%%
%iir_1.m %lskyp %%%%%%%%%%%%%%%%%% rp=1;rs=15; wp=.2*pi;ws=.3*pi; wap=tan(wp/2);was=tan(ws/2); [n,wn]=buttord(wap,was,rp,rs,'s'); [z,p,k]=buttap(n); [bp,ap]=zp2tf(z,p,k); [bs,as]=lp2lp(bp,ap,wap); [bz,az]=bilinear(bs,as,.5); [h,f]=freqz(bz,az,256,1); plot(f,abs(h)); title('双线性z 变换法获得数字低通滤波器,归一化频率轴'); xlabel('\omega/2\pi'); ylabel('低通滤波器的幅频相应');grid; figure; [h,f]=freqz(bz,az,256,100); ff=2*pi*f/100; absh=abs(h); plot(ff(1:128),absh(1:128)); title('双线性z 变换法获得数字低通滤波器,频率轴取[0,\pi/2]'); xlabel('\omega'); ylabel('低通滤波器的幅频相应');grid on; 运行结果: 00.050.10.150.20.25 0.30.350.40.450.500.1 0.2 0.3 0.40.50.60.70.8 0.9 1 双线性z 变换法获得数字低通滤波器,归一化频率轴 ω/2π低通滤波器的幅频相应
目录 1. 数字滤波器的设计任务及要求 (2) 2. 数字滤波器的设计及仿真 (2) 2.1数字滤波器的设计 (3) 2.2数字滤波器的性能分析 (3) 3. 数字滤波器的实现结构对其性能影响的分析 (8) 3.1数字滤波器的实现结构一及其幅频响应 (10) 3.2数字滤波器的实现结构二及其幅频响应 (12) 3.3 数字滤波器的实现结构对其性能影响的小结 (12) 4. 数字滤波器的参数字长对其性能影响的分析 (13) 4.1数字滤波器的实现结构一参数字长及幅频响应特性变化 4.2数字滤波器的实现结构二参数字长及幅频响应特性变化 4.3 数字滤波器的参数字长对其性能影响的小结 (16) 5. 结论及体会 (16) 5.1 滤波器设计、分析结论 (16) 5.2 我的体会 (16) 5.3 展望 (16)
1.数字滤波器的设计任务及要求 1. 设计说明 每位同学抽签得到一个四位数,由该四位数索引下表确定待设计数字滤波器的类型及其设计方法,然后用指定的设计方法完成滤波器设计。 要求:滤波器的设计指标: 低通: (1)通带截止频率πrad (id) pc 32 ln = ω (2)过渡带宽度πrad ) (i d 160 10log tz ≤?ω (3)滚降dB αroll 60= 其中,i d — 抽签得到那个四位数(学号的最末四位数),本设计中i d =0201。 2. 滤波器的初始设计通过手工计算完成; 3. 在计算机辅助计算基础上分析滤波器结构对其性能指标的影响(至少选择两种以上合适的滤波器 结构进行分析); 4. 在计算机辅助计算基础上分析滤波器参数的字长对其性能指标的影响; 5. 以上各项要有理论分析和推导、原程序以及表示计算结果的图表; 6. 课程设计结束时提交设计说明书。 2.数字滤波器的设计及仿真 2.1数字滤波器(编号0201)的设计 数字滤波器是数字信号处理的重要工具之一,它通过数值运算处理改变输入信号所含频率成分的相对比例或者滤出某些频率成分的数字器件或程序,而数字滤波器处理精度高、体积小、稳定、重量轻、灵活、不存在阻抗匹配问题,可以实现模拟滤波器无法实现的特殊功能。 本次课程设计使用MATLAB 信号处理箱和运用切比雪夫法设计数字滤波器,将手工计算一个切比雪夫I 型的IIR 的低通模拟滤波器的系统函数,并在MATLAB 的FDATool 设计工具分析其性能指标。
自适应滤波器 MATLAB仿真 摘要 : 本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS( Least mean squares )算法。以一个例子演示了自适应滤波器的滤波效果。实验结果表明,该滤波器滤波效果较好。 关键词:自适应滤波器 MATLAB7.0 LMS 算法 Simulate of adaptive filter based on MATLAB7.0 Abstract: This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single. Key words: LMS algorithm Adaptive Filter Matlab7.0 1引言 由 Widrow B 等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。 2自适应滤波原理及 LMS算法 2.1 自适应滤波原理 图 1 自适应滤波原理图 在自适应滤波器中,参数可调的数字滤波器一般为 FIR 数字滤波器, IIR 数字滤波器或格型数字滤波器。自适应滤波分 2 个过程。第一,输入信号想 x(n) 通过参数可调的数字滤波器后得输出信号 y(n) ,y(n) 与参考信号 d(n) 进行比较得误差信号 e(n) ;第二,通过一种自适应算法和 x(n) 和 e(n) 的值来调节参数可调的数字滤波器的参数,即加权系
东北大学 研究生考试试卷 考试科目: 课程编号: 阅卷人: 考试日期: 姓名:xl 学号: 注意事项 1.考前研究生将上述项目填写清楚. 2.字迹要清楚,保持卷面清洁. 3.交卷时请将本试卷和题签一起上交. 4.课程考试后二周内授课教师完成评卷工作,公共课成绩单与试卷交研究生院培养办公室, 专业课成绩单与试卷交各学院,各学院把成绩单交研究生院培养办公室. 东北大学研究生院培养办公室
数字滤波器设计 技术指标: 通带最大衰减: =3dB , 通带边界频率: =100Hz 阻带最小衰减: =20dB 阻带边界频率: =200Hz 采样频率:Fs=200Hz 目标: 1、根据性能指标设计一个巴特沃斯低通模拟滤波器。 2、通过双线性变换将该模拟滤波器转变为数字滤波器。 原理: 一、模拟滤波器设计 每一个滤波器的频率范围将直接取决于应用目的,因此必然是千差万别。为了使设计规范化,需要将滤波器的频率参数作归一化处理。设所给的实际频 率为Ω(或f ),归一化后的频率为λ,对低通模拟滤波器令λ=p ΩΩ/,则1 =p λ, p s s ΩΩ=/λ。令归一化复数变量为p ,λj p =,则p p s j j p Ω=ΩΩ==//λ。所以巴 特沃思模拟低通滤波器的设计可按以下三个步骤来进行。 (1)将实际频率Ω规一化 (2)求Ωc 和N 11010/2-=P C α s p s N λααlg 1 10 110lg 10 /10/--= 这样Ωc 和N 可求。 p x fp s x s f
根据滤波器设计要求=3dB ,则C =1,这样巴特沃思滤波器的设计就只剩一个参数N ,这时 N p N j G 222 )/(11 11)(ΩΩ+= += λλ (3)确定)(s G 因为λj p =,根据上面公式有 N N N p j p p G p G 22)1(11 )/(11)()(-+= += - 由 0)1(12=-+N N p 解得 )221 2exp(πN N k j p k -+=,k =1,2, (2) 这样可得 1 )21 2cos(21 ) )((1 )(21+-+-= --= -+πN N k p p p p p p p G k N k k 求得)(p G 后,用p s Ω/代替变量p ,即得实际需要得)(s G 。 二、双线性变换法 双线性变换法是将s 平面压缩变换到某一中介1s 平面的一条横带里,再通过标准变换关系)*1exp(T s z =将此带变换到整个z 平面上去,这样就使s 平面与z 平面之间建立一一对应的单值关系,消除了多值变换性。 为了将s 平面的Ωj 轴压缩到1s 平面的1Ωj 轴上的pi -到pi 一段上,可以通过以下的正切变换来实现: )21 tan(21T T Ω= Ω 这样当1Ω由T pi -经0变化到T pi 时,Ω由∞-经过0变化到∞+,也映射到了整个Ωj 轴。将这个关系延拓到整个s 平面和1s 平面,则可以得到
自适应滤波算法的研究 第1章绪论 1.1课题背景 伴随着移动通信事业的飞速发展,自适应滤波技术应用的范围也日益扩大。早在20世纪40年代,就对平稳随机信号建立了维纳滤波理论。根据有用信号和干扰噪声的统计特性(自相关函数或功率谱),用线性最小均方误差估计准则设计的最佳滤波器,称为维纳滤波器。这种滤波器能最大程度地滤除干扰噪声,提取有用信号。但是,当输入信号的统计特性偏离设计条件,则它就不是最佳的了,这在实际应用中受到了限制。到60年代初,由于空间技术的发展,出现了卡尔曼滤波理论,即利用状态变量模型对非平稳、多输入多输出随机序列作最优估计。现在,卡尔曼滤波器己成功地应用到许多领域,它既可对平稳的和非平稳的随机信号作线性最佳滤波,也可作非线性滤波。实质上,维纳滤波器是卡尔曼滤波器的一个特例。 在设计卡尔曼滤波器时,必须知道产生输入过程的系统的状态方程和测量方程,即要求对信号和噪声的统计特性有先验知识,但在实际中,往往难以预知这些统计特性,因此实现不了真正的最佳滤波。 Widrow B等于1967年提出的自适应滤波理论,可使自适应滤波系统的参数自动地调整而达到最佳状况,而且在设计时,只需要很少的或根本不需要任何关于信号与噪声的先验统计知识。这种滤波器的实现差不多象维纳滤波器那样简单,而滤波性能几乎如卡尔曼滤波器一样好。因此,近十几年来,自适应滤波理论和方法得到了迅速发展。[1] 自适应滤波是一种最佳滤波方法。它是在维纳滤波,Kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能。从而在工程实际中,尤其在信息处理技术中得到广泛的应用。 自适应滤波的研究对象是具有不确定的系统或信息过程。“不确定”是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因数和随机因数。
数字滤波器的设计及实现 【一】设计目的 1. 熟悉IIR 数字滤波器和FIR 数字滤波器的设计原理和方法; 2. 学会调用MATLAB 信号处理工具箱中的滤波器设计函数设计各种IIR 和FIR 数字滤波器,学会根据滤波要求确定滤波器指标参数; 3. 掌握用IIR 和FIR 数字滤波器的MA TLAB 实现方法,并能绘制滤波器的幅频特性、相频特性; 4. 通过观察滤波器的输入、输出信号的时域波形及其频谱,建立数字滤波的概念。 【二】设计原理 抑制载波单频调幅信号的数学表达式为 []))(2cos())(2cos(2 1)2cos()2cos()(000t f f t f f t f t f t s c c c ++-==ππππ (2.1) 其中,)2cos(t f c π称为载波,c f 为载波频率,)2cos(0t f π称为单频调制信号,0f 为调制正弦波信号频率,且满足0c f f >。由(2.1)式可见,所谓抑制载波单频调制信号,就是两个正弦信号相乘,它有2个频率成分:和频c f +0f ,差频c f -0f ,这两个频率成分关于载波频率c f 对称。所以,1路抑制载波单频调幅信号的频谱图是关于载波频率c f 对称的两根谱线。 复合信号st 产生函数mstg 清单: function st=mstg %产生信号序列st ,并显示st 的时域波形和频谱 %st=mstg 返回三路调幅信号相加形成的混合信号,长度N=800 N=800; %信号长度N 为800 Fs=10000;T=1/Fs;Tp=N*T; %采样频率Fs=10kHz ,Tp 为采样时间 t=0:T:(N-1)*T;k=0:N-1;f=k/Tp; fc1=Fs/10; %第1路调幅信号载波频率fc1=1000Hz fm1=fc1/10; %第1路调幅信号的调制信号频率fm1=100Hz fc2=Fs/20; %第2路调幅信号载波频率fc2=500Hz fm2=fc2/10; %第2路调幅信号的调制信号频率fm2=50Hz fc3=Fs/40; %第3路调幅信号载波频率fc3=250Hz fm3=fc3/10; %第3路调幅信号的调制信号频率fm3=25Hz xt1=cos(2*pi*fm1*t).*cos(2*pi*fc1*t); %产生第1路调幅信号 xt2=cos(2*pi*fm2*t).*cos(2*pi*fc2*t); %产生第2路调幅信号 xt3=cos(2*pi*fm3*t).*cos(2*pi*fc3*t); %产生第3路调幅信号 st=xt1+xt2+xt3; %三路信号相加,得到复合信号
燕山大学 课程设计说明书 题目:脉冲响应不变法设计数字低通滤波器 学院(系):电气工程学院 年级专业:09级精密仪器及机械2班 学号: 0901******** 学生姓名:范程灏 指导教师:刘永红 教师职称:讲师
电气工程学院《课程设计》任务书 课程名称:数字信号处理课程设计 基层教学单位:仪器科学与工程系指导教师: 学号学生姓名(专业)班级设计题目7、脉冲响应不变法设计数字低通滤波器 设 计技术参数给定技术指标为:Hz f p 100 =,Hz f s 300 =,dB p 3 = α,dB s 20 = α,采样频率Hz F s 1000 =。 设 计 要 求 设计Butterworth低通滤波器,用脉冲响应不变法转换成数字滤波器。 参考资料数字信号处理方面资料MATLAB方面资料 周次前半周后半周 应完成内容收集消化资料、学习MA TLAB软件, 进行相关参数计算 编写仿真程序、调试 指导教师签字基层教学单位主任签字
目录 第1章前言 (3) 第2章数字信号处理部分基础知识 (3) 第3章 MATLAB部分基础知识 (8) 3.1 MATLAB介绍 (8) 3.2 MATLAB命令介绍 (8) 第4章仿真过程及仿真图 (9) 4.1 仿真程序 (9) 4.2 仿真波形 (10) 第5章设计结论 (10) 第6章参考文献 (11)
第一章 前言 《数字信号处理》课程设计是在学生完成数字信号处理和MATLAB 的结合后的基本实验以后开设的。本课程设计的目的是为了让学生综合数字信号处理和MATLAB 并实现一个较为完整的小型滤波系统。这一点与验证性的基本实验有本质性的区别。开设课程设计环节的主要目的是通过系统设计、软件仿真、程序安排与调试、写实习报告等步骤,使学生初步掌握工程设计的具体步骤和方法,提高分析问题和解决问题的能力,提高实际应用水平。 IIR 数字滤波器具有无限宽的冲激响应,与模拟滤波器相匹配,所以IIR 滤波器的设计可以采取在模拟滤波器设计的基础上进一步变换的方法。其设计方法主要有经典设计法、直接设计法和最大平滑滤波器设计法。FIR 数字滤波器的单位脉冲响应是有限长序列。它的设计问题实质上是确定能满足所要求的转移序列或脉冲响应的常数问题,设计方法主要有窗函数法、频率采样法和等波纹最佳逼近法等。 第2章 数字信号处理基础知识部分 2.1巴特沃斯滤波器的幅度平方函数及其特点 巴特沃斯模拟滤波器幅度平方函数的形式是 )N c N c a j j j H 222 )/(11 )/(11ΩΩ+= ΩΩ+= Ω (5-6)
DSP 设计滤波器报告 姓名:张胜男 班级:07级电信(1)班 学号:078319120 一·低通滤波器的设计 (一)实验目的:掌握IIR 数字低通滤波器的设计方法。 (二)实验原理: 1、滤波器的分类 滤波器分两大类:经典滤波器和现代滤波器。 经典滤波器是假定输入信号)(n x 中的有用成分和希望取出的成分各自占有不同的频带。这样,当)(n x 通过一个线性系统(即滤波器)后可讲欲去除的成分有效的去除。 现代滤波器理论研究的主要内容是从含有噪声的数据记录(又称时间序列)中估计出信号的某些特征或信号本身。 经典滤波器分为低通、高通、带通、带阻滤波器。每一种又有模拟滤波器(AF )和数字滤波器(DF )。对数字滤波器,又有IIR 滤波器和FIR 滤波器。 IIR DF 的转移函数是: ∑∑=-=-+==N k k k M r r r z a z b z X z Y z H 10 1)()()( FIR DF 的转移函数是: ∑-=-=10)()(N n n z n h z H FIR 滤波器可以对给定的频率特性直接进行设计,而IIR 滤波器目前最通用的方法是利用已经很成熟的模拟滤波器的设计方法进行设计。 2、滤波器的技术要求 低通滤波器: p ω:通带截止频率(又称通带上限频率) s ω:阻带下限截止频率 p α:通带允许的最大衰减 s α:阻带允许的最小衰减 (p α,s α的单位dB ) p Ω:通带上限角频率 s Ω:阻带下限角频率 (s p p T ω=Ω,s s s T ω=Ω)即 C p p F ωπ2=Ω C s s F ωπ2=Ω 3、IIR 数字滤波器的设计步骤:
大学 数字信号处理课程要求论文 基于LMS的自适应滤波器设计及应用 学院名称: 专业班级: 学生姓名: 学号: 2013年6月
摘要自适应滤波在统计信号处理领域占有重要地位,自适应滤波算法直接决定着滤波器性能的优劣。目前针对它的研究是自适应信号处理领域中最为活跃的研究课题之一。收敛速度快、计算复杂性低、稳健的自适应滤波算法是研究人员不断努力追求的目标。 自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。研究自适应滤波器可以去除输出信号中噪声和无用信息,得到失真较小或者完全不失真的输出信号。本文介绍了自适应滤波器的理论基础,重点讲述了自适应滤波器的实现结构,然后重点介绍了一种自适应滤波算法最小均方误差(LMS)算法,并对LMS算法性能进行了详细的分析。最后本文对基于LMS算法自适应滤波器进行MATLAB仿真应用,实验表明:在自适应信号处理中,自适应滤波信号占有很重要的地位,自适应滤波器应用领域广泛;另外LMS算法有优也有缺点,LMS算法因其鲁棒性强特点而应用于自回归预测器。 关键词:自适应滤波器,LMS算法,Matlab,仿真
1.引言 滤波技术在当今信息处理领域中有着极其重要的应用。滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过;而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。Wiener于20世纪40年代提出了最佳滤波器的概念,即假定线性滤波器的输入为有用信号和噪音之和,两者均为广义平稳过程且己知他们的二阶统计过程,则根据最小均方误差准则(滤波器的输出信号与期望信号之差的均方值最小)求出最佳线性滤波器的参数,称之为Wiener滤波器。同时还发现,在一定条件下,这些最佳滤波器与Wiener滤波器是等价的。然而,由于输入过程取决于外界的信号、干扰环境,这种环境的统计特性常常是未知的、变化的,因而不能满足上述两个要求,设计不出最佳滤波器。这就促使人们开始研究自适应滤波器。自适应滤波器由可编程滤波器(滤波部分)和自适应算法两部分组成。可编程滤波器是参数可变的滤波器,自适应算法对其参数进行控制以实现最佳工作。自适应滤波器的参数随着输入信号的变化而变化,因而是非线性和时变的。 2. 自适应滤波器的基础理论 所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。所谓“最优”是以一定的准则来衡量的,最常用的两种准则是最小均方误差准则和最小二乘准则。最小均方误差准则是使误差的均方值最小,它包含了输入数据的统计特性,准则将在下面章节中讨论;最小二乘准则是使误差的平方和最小。 自适应滤波器由数字结构、自适应处理器和自适应算法三部分组成。数字结构是指自适应滤波器中各组成部分之间的联系。自适应处理器是前面介绍的数字滤波器(FIR或IIR),所不同的是,这里的数字滤波器是参数可变的。自适应算法则用来控制数字滤波器参数的变化。 自适应滤波器可以从不同的角度进行分类,按其自适应算法可以分为LMS自适应滤波器、RLS自适应滤波器等等。
FIR 数字滤波器设计与实现 一.摘要:数字滤波器是一种具有频率选择性的离散线性系统,在信号数字处理中有着广泛的应 用。其中FIR 滤波器是一种常用的滤波器,它在保证幅度特性满足技术要求的同时,很容易做到严格的线性相位特性,在语音分析、图像处理、雷达监测等对信号相位要求高的领域有着广泛的应用,能实现IIR 滤波器不能实现的许多功能。 二.关键词:FIR 窗函数系统函数MATLAB 三.内容提要: 数字滤波器的功能就是把输入序列通过一定的运算变换成输出序列,因此数字滤波器的结构系 统中就必须包括一定数量和性能的运算器件和运算单元,而运算器件和运算单元的配置必须由数字滤波器的结构特点和性能特点来决定,因此在进行FIR 数字滤波器的设计之前,有必要介绍和总结FIR 数字滤波器的基本结构和相关特性(包括频响曲线(幅度和相位),单位冲激响应等),在介绍完其基本结构和相关特性后,就进行FIR 数字滤波器的设计和实现。 (一)FIR 滤波器的基本结构 在讨论任何一种滤波器时,都要着重分析其系统函数,FIR 滤波器的系统函数为: n N n z n h z H ∑-==1 0)()(。从该系统函数可看出,FIR 滤波器有以下特点: 1)系统的单位冲激响应h(n)在有限个n 值处不为零; 2)系统函数H(z)在|z|>0处收敛,极点全部在z=0处(稳定系统); 3)结构上主要是非递归结构,没有输出到输入的反馈,但有些结构中(例如频率抽样结构)也包 含有反馈的递归部分。 1.FIR 滤波器实现的基本结构有: 1) 横截型(卷积型、直接型) a.一般FIR 滤波器的横截型(直接型、卷积型)结构: 若给定差分方程为: 。则可以直接由差分方程得出FIR 滤波器结构如 下图所示: 这就是FIR 滤波器的横截型结构,又称直接型或卷积型结构。 b .线性相位FIR 滤波器的横截型结构
实验报告 课程名称:数字信号处理 实验名称:低通滤波器设计实验 院(系): 专业班级: 姓名: 学号: 指导教师: 一、实验目的: 掌握IIR数字低通滤波器的设计方法。 二、实验原理: 2.1设计巴特沃斯IIR滤波器 在MATLAB下,设计巴特沃斯IIR滤波器可使用butter 函数。 Butter函数可设计低通、高通、带通和带阻的数字和模拟IIR滤波器,其特性为使通带内的幅度响应最大限度地平坦,但同时损失截止频率处的下降斜度。在期望通带平滑的情况下,可使用butter函数。butter函数的用法为:
[b,a]=butter(n,Wn)其中n代表滤波器阶数,W n代表滤波器的截止频率,这两个参数可使用buttord函数来确定。buttord函数可在给定滤波器性能的情况下,求出巴特沃斯滤波器的最小阶数n,同时给出对应的截止频率Wn。buttord函数的用法为:[n,Wn]= buttord(Wp,Ws,Rp,Rs)其中Wp和Ws分别是通带和阻带的拐角频率(截止频率),其取值范围为0至1之间。当其值为1时代表采样频率的一半。Rp和Rs分别是通带和阻带区的波纹系数。 2.2契比雪夫I型IIR滤波器。 在MATLAB下可使用cheby1函数设计出契比雪夫I 型IIR滤波器。 cheby1函数可设计低通、高通、带通和带阻契比雪夫I 型滤IIR波器,其通带内为等波纹,阻带内为单调。契比雪夫I型的下降斜度比II型大,但其代价是通带内波纹较大。cheby1函数的用法为:[b,a]=cheby1(n,Rp,Wn,/ftype/)在使用cheby1函数设计IIR滤波器之前,可使用cheblord 函数求出滤波器阶数n和截止频率Wn。cheblord函数可在给定滤波器性能的情况下,选择契比雪夫I型滤波器的最小阶和截止频率Wn。cheblord函数的用法为: [n,Wn]=cheblord(Wp,Ws,Rp,Rs)其中Wp和Ws分别是通带和阻带的拐角频率(截止频率),其取值范围为0至1之间。当其值为1时代表采样频率的一半。Rp和Rs分别是通带和阻带区的波纹系数。 三、实验要求: 利用Matlab设计一个数字低通滤波器,指标要求如下:
实验二:FIR数字滤波器设计与软件实现 一、实验指导 1.实验目的 (1)掌握用窗函数法设计FIR数字滤波器的原理和方法。 (2)掌握用等波纹最佳逼近法设计FIR数字滤波器的原理和方法。(3)掌握FIR滤波器的快速卷积实现原理。 (4)学会调用MATLAB函数设计与实现FIR滤波器。 2.实验内容及步骤 (1)认真复习第七章中用窗函数法和等波纹最佳逼近法设计FIR数字滤波器的原理; (2)调用信号产生函数xtg产生具有加性噪声的信号xt,并自动显示xt及其频谱,如图1所示; 图1 具有加性噪声的信号x(t)及其频谱如图 (3)请设计低通滤波器,从高频噪声中提取xt中的单频调幅信号,要求信号幅频失真小于0.1dB,将噪声频谱衰减60dB。先观察xt的频谱,确定滤波器指标参数。
(4)根据滤波器指标选择合适的窗函数,计算窗函数的长度N,调用MATLAB函数fir1设计一个FIR低通滤波器。并编写程序,调用MATLAB快速卷积函数fftfilt实现对xt的滤波。绘图显示滤波器的频响特性曲线、滤波器输出信号的幅频特性图和时域波形图。(4)重复(3),滤波器指标不变,但改用等波纹最佳逼近法,调用MATLAB函数remezord和remez设计FIR数字滤波器。并比较两种设计方法设计的滤波器阶数。 提示:○1MATLAB函数fir1的功能及其调用格式请查阅教材; ○2采样频率Fs=1000Hz,采样周期T=1/Fs; ○3根据图1(b)和实验要求,可选择滤波器指标参数:通带截止频率fp=120Hz,阻带截至频率fs=150Hz,换算成数字频率,通带截止 频率 p 20.24 p f ωπ =T=π,通带最大衰为0.1dB,阻带截至频率 s 20.3 s f ωπ =T=π,阻带最小衰为60dB。 ○4实验程序框图如图2所示,供读者参考。
实验四:IIR数字滤波器设计及软件实现 一、实验内容及步骤 1、调用信号产生函数mstg产生由三路抑制载波调幅信号相加构成的复合信号 st,三路信号在时域混叠无法在时域分离,但频域是可分离的,所以可以通过滤波的方法在频域分离。 2、要求将st中三路调幅信号分离,通过观察st的幅频特性曲线,分别确定可 以分离st中三路抑制载波单频调幅信号的三个滤波器(低通、高通、带通)的通带截止频率和阻带截止频率。要求滤波器的通带最大衰减为0.1db,阻带最小衰减为60db. 3、编程序调用MATLAB滤波器设计函数ellipord和ellip分别设计三个椭圆滤 波器,并绘图显示其损耗函数曲线。 4、调用滤波器实现函数filter,用三个滤波器分别对信号产生函数mstg产生 的信号st进行滤波,分离出st中的三路不同载波频率的调幅信号yn1、yn2、yn3的,并绘图显示其时域波形,观察分离效果。 二、实验结果显示 原信号图形:
高通滤波器 输出波形
带通滤波器输出波形
低通滤波器输出波形
带阻滤波器输出波形
三、实验结论:由上面所绘图形可知,利用数字滤波器完全可以将时域混叠而频域未混叠的波形分开,达到滤波目的。 四、思考题 (1)请阅读信号产生函数mstg,确定三路调幅信号的载波频率和调制信号频率。答:第一路调幅信号的调制信号频率为100HZ,载波频率为1000HZ;第二路调幅信号的调制信号频率为50HZ,载波频率为500HZ;第三路调幅信号的调整信号频率为25HZ,载波频率为250HZ。 (2)信号产生函数mstg中采样点数N=1600,对st进行N点FFT可以得到6根理想谱线。如果取N=1800,可否得到6根理想谱线?为什么?N=2000呢?请改变函数mstg 中采样点数N的值,观察频谱图验证您的判断是否正确? 答: 因为信号st是周期序列,谱分析时要求观察时间为整数倍周期。分析可知,st的每个频率成分都是25Hz的整数倍。采样频率Fs=10kHz=25×400Hz,即在25Hz 的正弦波的1个周期中采样400点。所以,当N为400的整数倍时一定为st的整数个周期。因此,采样点数N=800和N=2000时,对st进行N点FFT可以得到6根理想谱线。如果取N=1000,不是400的整数倍,不能得到6根理想谱线。
目录1.题目...................................................................... (2) 2.要求...................................................................... . (2) 3.设计原理...................................................................... .. (2) 3.1数字滤波器基本概念 (2) 3.2数字滤波器工作原理 (2) 3.3巴特沃斯滤波器设计原理 (2) 3.4脉冲响应不法...................................................................... . (4) 3.5实验所用MATLAB函数说明 (5)
4.设计思路...................................................................... (6) 5、实验内容...................................................................... .. (6) 5.1实验程序...................................................................... (6) 5.2实验结果分析...................................................................... (10) 6.心得体会...................................................................... .. (10) 7.参考文献...................................................................... .. (10) 一、题目:巴特沃斯数字低通滤波器 二、要求:利用脉冲响应不变法设计巴特沃斯数字低通滤波器,通带截止频率100HZ,采样频率1000HZ,通带最大衰减为0.5HZ,阻带最小衰减为10HZ,画出幅频、相频相应相应曲线。并假设一个信号x(t)=sin(2*pi*f1*t)+sin(2*pi*f2*t),其中f1=50HZ,f2=200HZ。用此信号验证滤波器设计的正确性。 三、设计原理 1、数字滤波器的基本概念 所谓数字滤波器,是指输入、输出均为数字信号,通过数值运算处理改变输入信号所含频率成分的相对比例,或者滤波器除某些频率成分的数字器件或程序,因此,数字滤波的概念和模拟滤波相同,只是的形式和实现滤波方法不同。正因为数字滤波通过数值运算实现滤波,所以数字滤波处理精度高、稳定、体积小、质量轻、灵活、不存在阻抗匹配问题,可以实验模拟滤波器无法实现的特殊滤
FIR 滤波器的设计 一.摘 要:数字滤波器是一种具有频率选择性的离散线性系统,在信号数字处理中有 着广泛的应用。其中FIR 滤波器是一种常用的滤波器,它在保证幅度特性满足技术要求的同时,很容易做到严格的线性相位特性,在语音分析、图像处理、雷达监测等对信号相位要求高的领域有着广泛的应用,能实现IIR 滤波器不能实现的许多功能。 二.关键词:FIR 窗函数 系统函数 MATLAB 三.引言: 数字滤波器的功能就是把输入序列通过一定的运算变换成输出序列,因此数字滤波器的结构系统中就必须包括一定数量和性能的运算器件和运算单元,而运算器件和运算单元的配置必须由数字滤波器的结构特点和性能特点来决定,因此在进行FIR 数字滤波器的设计之前,有必要介绍和总结FIR 数字滤波器的基本结构和相关特性(包括频响曲线(幅度和相位),单位冲激响应等),在介绍完其基本结构和相关特性后,就进行FIR 数字滤波器的设计和实现。 (1).FIR 滤波器的基本结构 在讨论任何一种滤波器时,都要着重分析其系统函数,FIR 滤波器的系统函数为: n N n z n h z H ∑-== 1 )()( 。从该系统函数可看出,FIR 滤波器有以下特点: 1)系统的单位冲激响应h(n)在有限个n 值处不为零; 2)系统函数H(z)在|z|>0处收敛,极点全部在z=0处(稳定系统); 3)结构上主要是非递归结构,没有输出到输入的反馈,但有些结构中(例如频率抽样结构)也包含有反馈的递归部分。 1.FIR 滤波器实现的基本结构有: 1) 横截型(卷积型、直接型) a.一般FIR 滤波器的横截型(直接型、卷积型)结构: 若给定差分方程为: 。 则可以直接由差分方程得出FIR 滤波器 结构如下图所示: 这就是FIR 滤波器的横截型结构,又称直接型或卷积型结构。 b .线性相位FIR 滤波器的横截型结构 若h(n)呈现对称特性,即此FIR 滤波器具有线性相位,则可以简化成横截型结构,下面分情况讨论: ①N 为奇数时线性相位FIR 滤波器实现结构如图所示: