高中物理《磁场》典型题(经典推荐) 一、单项选择题 1.下列说法中正确的是( ) A .在静电场中电场强度为零的位置,电势也一定为零 B .放在静电场中某点的检验电荷所带的电荷量q 发生变化时,该检验电荷所受电场力F 与其电荷量q 的比值保持不变 C .在空间某位置放入一小段检验电流元,若这一小段检验电流元不受磁场力作用,则该位置的磁感应强度大小一定为零 D .磁场中某点磁感应强度的方向,由放在该点的一小段检验电流元所受磁场力方向决定 2.物理关系式不仅反映了物理量之间的关系,也确定了单位间的关系。如关系式U=IR ,既反映了电压、电流和电阻之间的关系,也确定了V (伏)与A (安)和Ω(欧)的乘积等效。现有物理量单位:m (米)、s (秒)、N (牛)、J (焦)、W (瓦)、C (库)、F (法)、A (安)、Ω(欧)和T (特) ,由他们组合成的单位都与电压单位V (伏)等效的是( ) A .J/C 和N/C B .C/F 和/s m T 2? C .W/A 和m/s T C ?? D .ΩW ?和m A T ?? 3.如图所示,重力均为G 的两条形磁铁分别用细线A 和B 悬挂在水平的天 花板上,静止时,A 线的张力为F 1,B 线的张力为F 2,则( ) A .F 1 =2G ,F 2=G B .F 1 =2G ,F 2>G C .F 1<2G ,F 2 >G D .F 1 >2G ,F 2 >G 4.一矩形线框置于匀强磁场中,线框平面与磁场方向垂直,先保持线框的面积不变,将磁感应强度在1s 时间内均匀地增大到原来的两倍,接着保持增大后的磁感应强度不变,在1s 时间内,再将线框的面积均匀地减小到原来的一半,先后两个过程中,线框中感应电动势的比值为( ) A .1/2 B .1 C .2 D .4 5.如图所示,矩形MNPQ 区域内有方向垂直于纸面的匀强磁场,有5个带电粒子从图中箭头所示位置垂直于磁场边界进入磁场,在纸面内做匀速圆周运动,运动轨迹为相应的圆弧,这些粒子的质量,电荷量以及速度大小如下表所示,由以上信息可知,从图中a 、b 、c 处进入
机械能守恒定律及其应用·典型例题精析 链,则当铁链刚挂直时速度多大? [思路点拨] 以铁链和地球组成的系统为对象,铁链仅受两个力:重力G和光滑水平桌面的支持力N,在铁链运动过程中,N与运动速度v垂直,N 不做功,只有重力G做功,因此系统机械能守恒.铁链释放前只有重力势能,但由于平放在桌面上与悬吊着两部分位置不同,计算重力势能时要分段计算.选铁链挂直时的下端点为重力势能的零标准,应用机械能守恒定律即可求解. [解题过程] 初始状态:平放在桌面上的部分铁链具有的重力势能 mv2,又有重力势能 根据机械能守恒定律有E1=E2.所以E p1+E p2=E k2+E p2,故 [小结] (1)应用机械能守恒定律解题的基本步骤由本题可见一斑.①根据题意,选取研究对象.②明确研究对象在运动过程中受力情况,并弄清各力做功情况,分析是否满足机械能守恒条件.③恰当地选取重力势能的零势能参考平面,确定研究对象在过程的始、末状态机械能转化情况.④应用机械能守恒定律列方程、求解. (2)本题也可从线性变力求平均力做功的角度,应用动能定理求解,也可应用F-h图线(示功图)揭示的功能关系求解,请同学们尽可发挥练习.
[例题2] 如图8-54所示,长l的细绳一端系质量m的小球,另一端固定于O点,细绳所能承受拉力的最大值是7mg.现将小球拉至水平并由静止释放,又知图中O′点有一小钉,为使小球可绕O′点做竖直面内的圆周运动.试求OO′的长度d与θ角的关系(设绳与小钉O′相互作用中无能量损失). [思路点拨] 本题所涉及问题层面较多.除涉及机械能守恒定律之外,还涉及圆周运动向心力公式.另外还应特别注意两个临界条件:①要保证小球能绕O′完成圆周运动,圆周半径就不得太长,即OO′不得太短;②还必须保证细绳不会被拉断,故圆周半径又不能太短,也就是OO′不能太长.本题的研究中应以两个特殊点即最高点D和最低点C入手,依上述两临界条件,按机械能守恒和圆运动向心力公式列方程求解. [解题过程] 设小球能绕O′点完成圆周运动,如图8-54所示.其最高点为D,最低点为C.对于D点,依向心力公式有 (1) 其中v D为D点速度,v D可由机械能守恒定律求知,取O点为重力势能的零势能位置,则 (2) 将(1)式与(2)式联立,解之可得
功能点估算案例 下面以员工管理系统为例,详细说明如何利用功能点估算法计算业务复杂度。 在员工管理系统中添加一个员工的资料,会使用到员工的一般信息、教育情况、工作经历和家属信息。员工隶属于某个部门,在本系统中会有一个对部门进行维护的功能。员工的工资则由另外一个财务系统提供。因此,其用例图如下所示: 图1 员工管理系统用例图 假设员工基本信息如下所示: ?员工ID(标签) ?员工名称 ?性别 ?生日 ?婚否 ?所属部门ID ?所属部门名称 ?受教育的时间 ?学校名称 ?所学专业
?工作时间 ?工作单位 ?工作部门 ?工作职务 ?家属的姓名 ?之间关系 ?家属年龄 ?工作单位 假设部门信息如下所示: ?部门ID ?部门名称 假设工资表信息如下所示: ?员工ID ?员工姓名 ?金额 ?单位 ILF和EIF的功能点数 本案例识别出来ILF和EIF功能点个数如下表所示。 EI、EQ和EO的功能点数 本范例识别出来EI、EQ和EO功能点个数如下表所示。
本系统的通用系统特性及其影响程度如下表所示。
最终调整后的功能点数量为: (19 + 25 + 9 + 5)* 0.84 = 48.72个 总结 功能点估算法是一个非常有用的对软件规模进行估算的国际通用技术,是项目管理人员必须掌握的工具。为了便于大家对功能点的技术进行理解和记忆,这里对其进行总结:由于计算机软件就是为了实现无纸办公,那么在估算功能点时应该多以用户的纸质表单为依据,每个表单就是一个ILF或EIF,表单上显示的字段都是DET,一个表单上的“核心”内容不管是由几个数据表来分别存放数据的,每个表都是一个RET。 简单来讲,ILF和EIF可以被看作数据库中的数据表,但是主、从表将被视为一个ILF或EIF。那么,ILF和EIF的复杂度就是由数据表中的字段DET和一个ILF或EIF自身所包含的主、从表个数RET来决定。在计算DET时主、外键只能算作一个。 EI就是对应用户增加、修改、删除的操作,EO和EQ都是用于用户查询的操作。EO和EQ 的区别是,EO查询时使用了数学公式或计算方法。EI、EQ和EO的复杂度是由FTR和DET 决定的。FTR的个数由ILF和EIF的个数决定,可以由主表中主、外键的个数来计算。在计算EI的DET时,只有用户在界面上直接输入的信息才算作DET,通过页面自动计算或转换的数据不能算作EI的DET。在EO和EQ计算DET时,报表的标题、页码等信息不能被计算为一个DET。
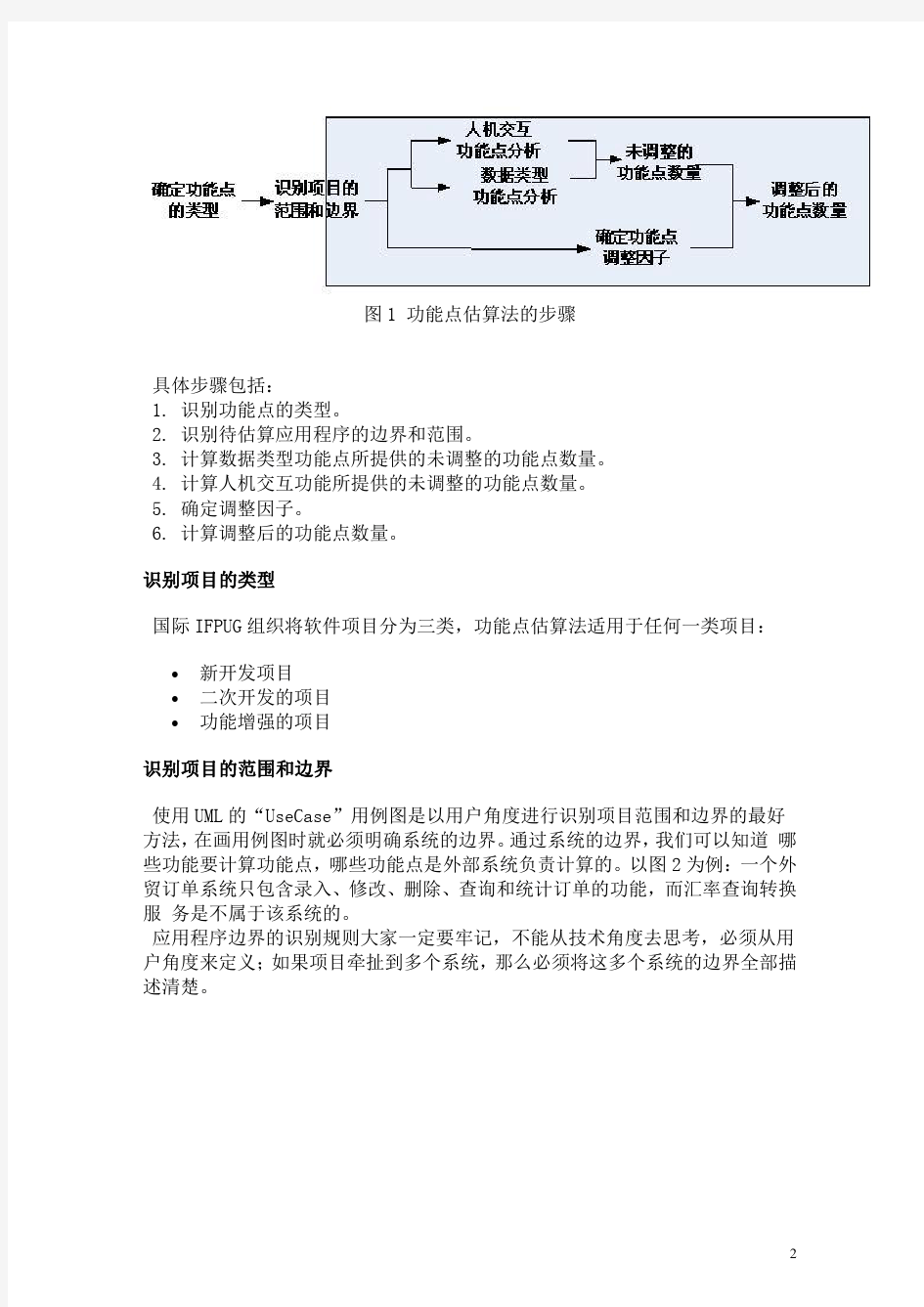
选用了FP功能点分析作为项目主要的估算方法.因为FP方法中有大量项目经验数据可以从网络上获得,同时其数据功能TLF、EIF,以及事务功能EI、EO、EQ的计算对经验数据依赖不强,只需对概念理解正确一般就可以正确估算了.在估算成本的时候,因为公司以前的生产率数据是以LOC为单位的,我利用软件工程书籍中的“逆火”经验数据,将 LOC转换为功能点单位,当然,这里必然导致一些误差。为了降低估算误差,最后使用Delphi专家分析法对估算结果进行了调整. 功能点估算法是软件项目管理众多知识中比较有技术含量的一个。在软件项目管理中项目计划制定的优劣直接关系到项目的成败,项目计划中对项目范围的估算又尤为重要。如果项目负责人对项目的规模没有一个比较客观的认识,没有对工作量、所需资源、完工时间等因素进行估算,那么项目计划也就没有存在的意义。 功能点估算法的特点 项目范围的估算在CMMI的“MA”度量分析管理和“PP”项目计划中均有涉及。对软件项目范围的估算有很多种方法,常见的是LOC代码行和FP功能点法。它们之间的区别和关系如下: ?功能点估算法常用在项目开始或项目需求基本明确时使用,这时进行估算其结果的准确性比较高。假如这个时候使用LOC代码行估算法,则误差会比较大。 ?使用功能点估算法无需懂得软件使用何种开发技术。LOC代码行估算法则与软件开发技术密切相关。 ?功能点估算法是以用户为角度进行估算,LOC代码行估算法则是以技术为角度进行估算。 ?通过一些行业标准或企业自身度量的分析,功能点估算法是可以转换为LOC代码行的。 在项目刚开始的时候进行功能点估算可以对项目的范围进行预测。在项目开发的过程中由于需求的变更和细化可能会导致项目范围的蔓延,计算出来的结果会与当初估计的不同。因此,在项目结束时还需要对项目的范围情况重新进行估算,这个时候估算的结果才能最准确反映项目的规模。 功能点分析的步骤 具体步骤包括: 1. 识别功能点的类型。 2. 识别待估算应用程序的边界和范围。 3. 计算数据类型功能点所提供的未调整的功能点数量。 4. 计算人机交互功能所提供的未调整的功能点数量。 5. 确定调整因子。 6. 计算调整后的功能点数量。
洛仑兹力典型例题 〔例1〕一个带电粒子,沿垂直于磁场的 方向射入一匀强磁场.粒子的一段径迹如图 所示,径迹上的每一小段都可近似看成圆 弧.由于带电粒子使沿途的空气电离,粒子 的能量逐渐减小(带电量不变).从图中情 况可以确定[ ] A.粒子从a到b,带正电 B.粒子从b到a,带正电 C.粒子从a到b,带负电 D.粒子从b到a,带负电 R=mv /qB,由于q不变,粒子的轨道半径逐渐减小,由此断定粒子从b到a运动.再利用左手定则确定粒子带正电. 〔答〕B. 〔例2〕在图中虚线所围的区域内,存在电场强度为E的匀强电场和磁感应强 度为B的匀强磁场.已知从左方水平射入的电子,穿过这区域时未发生偏转,设重力可忽略不计,则在这区域中的E和B的方向可能是[ ] A.E和B都沿水平方向,并与电子运动的方向相同 B.E和B都沿水平方向,并与电子运动的方向相反 C.E竖直向上,B垂直纸面向外 D.E竖直向上,B垂直纸面向里
〔分析〕不计重力时,电子进入该区域后仅受电场力F E和洛仑兹力F B作用.要求电子穿过该区域时不发生偏转电场力和洛仑兹力的合力应等于零或合力方向与电子速度方向在同一条直线上. 当E和B都沿水平方向,并与电子运动的方向相同时,洛仑兹力F B等于零,电子仅受与其运动方向相反的电场力F E作用,将作匀减速直线运动通过该区域. 当E和B都沿水平方向,并与电子运动的方向相反时,F B=0,电子仅受与其运动方向相同的电场力作用,将作匀加速直线运动通过该区域. 当E竖直向上,B垂直纸面向外时,电场力F E竖直向下,洛仑兹力F B 动通过该区域. 当E竖直向上,B垂直纸面向里时,F E和F B都竖直向下,电子不可能在该区域中作直线运动. 〔答〕A、B、C. 〔例3〕如图1所示,被U=1000V的电压加速的电子从电子枪中发射出来, 沿直线a方向运动,要求击中在α=π/3方向,距枪口d=5cm的目标M,已知磁场垂直于由直线a和M所决定的平面,求磁感强度. 〔分析〕电子离开枪口后受洛仑兹力作用做匀速圆周运动,要求击中目标M,必须加上垂直纸面向内的磁场,如图2所示.通过几何方法确定圆心后就可迎刃而解了.
攻克顽疾 层层突破1 【顽疾一】转动偏转最大角度,何时速度最大 1. 如图所示,在水平向右的的匀强电场中,长为l 的绝缘轻杆可绕固定轴O 在竖直面内无摩擦转 动,两个小球A 、B 固定于杆的两端,A 、B 的质量分别为m 和2m ,A 带负电,电量为q ,B 带正电,电量也为q 。若杆在水平位置,由静止开始转动,杆能转过的最大角度为60°,则匀强电场的场强E v =__________。 2.(12分)如图所示,一质量为m 、带电量为-q 的小球A ,用长为L 的绝缘轻杆与固定转动轴O 相连接,绝缘轻杆可绕轴O 无摩擦转动。整个装置处于水平向右的匀强电场中,电场强度E =q mg 2, 现将轻杆从图中的竖直位置由静止释放。 (1)轻杆转过90°时,小球A 的速度为多大? (2)轻杆转过多大角度时小球A 的速度最大? (3)小球A 转过的最大角度为多少? (1)动能定理:qEL + (-mg L ) =22 1 v m -0, 解出v =gL 2 (1分) (2)轻杆转动过程中,合力矩为零时,小球A 的速度最大 (1分) 即mgL sin α=qEL cos α (2分) 得到tan α=2,解出α=arctan2=63.43° (1分) (3)设小球A 的速度减为零时轻杆与水平方向的夹角为β, 动能定理:qEL cos β+[-mg(L +L sin β)]=0-0 (2分) 得到2cos β=1+sin β, 解出sin β=0.6(舍去sin β=-1),β=37° (2分) 因此,小球A 转过的最大角度为90°+37°=127° 【顽疾二】整体动能定理,系统内机械能守恒,系统内能量守恒 1.如图所示,绝缘杆两端固定着带电量分别为q A 、q B 的小球A 和B ,轻杆处于匀强电场中,不考 虑两球之间的相互作用。最初杆与电场线垂直,将杆右移的同时使其顺时针转过900 ,发现A 、B 两球电势能之和不变。根据图示位置关系,下列说法正确的是( ) A .因为A 、B 两球电势能之和不变,所以电场力对A 球或B 球都不做功;
1word 版本可编辑.欢迎下载支持. 磁场、洛伦兹力 1.制药厂的污水处理站的管道中安装了如图所示的流量计,该装置由绝缘材料制成,长、宽、高分别为a 、b 、c ,左右两端开口,在垂直于上下底面方向加磁感应强度为B 的匀强磁场,在前后两个面的内侧固定有金属板作为电极,当含有大量正负离子(其重力不计)的污水充满管口从左向右流经该装置时,利用电压表所显示的两个电极间的电压U ,就可测出污水流量Q (单位时间内流出的污水体积).则下列说法正确的是 ( ) A .后表面的电势一定高于前表面的电势,与正负哪种离子多少无关 B .若污水中正负离子数相同,则前后表面的电势差为零 C .流量Q 越大,两个电极间的电压U 越大 D .污水中离子数越多,两个电极间的电压U 越大 2.长为L 的水平板间,有垂直纸面向内的匀强磁场,如图所示,磁感应强度为B ,板间距离也为L ,板不带电,现有质量为m ,电量为q 的带正电粒子(不计重力),从左边极板间中点处垂直磁感线以速度v 水平射入磁场,欲使粒子不打在极板上, 可采用的办法是( ) A.使粒子的速度v < m BqL 4 B.使粒子的速度v >m BqL 45 C.使粒子的速度v >m BqL D.使粒子的速度m BqL 4 物理经典习题错题——功能关系 1.如图所示,固定的倾斜光滑杆上套有一个质量为m 的圆环,圆环与竖直放置的轻质弹簧一端相连,弹簧的另一端固定在地面上的A 点,弹簧处于原长h 。让圆环沿杆滑下,滑到杆的底端时速度为零。则在圆环下滑过程中 ( ) A .圆环机械能守恒 B .弹簧的弹性势能先增大后减小 C .弹簧的弹性势能变化了mgh D .弹簧的弹性势能最大时圆环动能最大 2.如图所示,a 、b 两物块质量分别为m 、2m ,用不计质量的细绳相连接,悬挂在定滑轮的两侧,不计滑轮质量和一切摩擦.开始时,a 、b 两物块距离地面高度相同,用手托住物块b ,然后突然由静止释放,直到a 、b 物块间高度差为h.在此过程中,下列说法正确的是 A.物块a 的机械能逐渐增加 B.物块b 机械能减少了2/3mgh C.物块b 重力势能的减少量等于细绳拉力对它所做的功 D.物块a 重力势能的增加量小于其动能增加 3.质量为50kg 的某人沿一竖直悬绳匀速向上爬,在爬高3 m 的过程中,手与绳子之间均无相对滑动, 重力加速度g 取10m/s 2,则下列说法正确的是 A .绳子对人的静摩擦力做功等于人的重力势能的增加 B .绳子对人的静摩擦力做功等于人的机械能的增加 C .绳子对人的静摩擦力做功为1500 J D .人克服自身重力做功使其重力势能增加1500 J 4. 如图所示,一个小物体在足够长的斜面上以一定初速度开始沿斜面向上运动,斜面各处粗糙程度相同,则物体以后在斜面上运动的过程中 A .动能一定一直减小 B .机械能一直减小 C .如果某段时间内摩擦力做功与物体动能的改变量相同,则此后物体动能将不断增大 D .如果某两段时间内摩擦力做功相同,则这两段时间内摩擦力做功功率一定相等 5.如图所示,在倾角为θ的光滑斜劈P 的斜面上有两个用轻质弹簧相连的物块A 、B ,C 为一垂直固定在斜面上的挡板。A、B质量均为m ,弹簧的劲度系数为k ,系统静止于光滑水平面。现开始用一水平力F 从零开始缓慢增大作用于P,(物块A一直没离开斜面,重力加速度g )下列说法正确的是( ) A.力F 较小时A 相对于斜面静止,F 增加到某一值,A 相对于斜面向上滑行 B.力F 从零开始增加时,A 相对斜面就开始向上滑行 C.B 离开C 后A B 和弹簧组成的系统机械能守恒 D.B 离开挡板C 时,弹簧处于原长状态 6.用水平力F 拉一物体,使物体在水平地面上由静止开始做匀加速直线运动,t 1时刻撤去拉力F ,物体做匀减速直线运动,到t 2时刻停止.其速度—时间图象如图所示,且α>β,若拉力F 做的功为W 1,平均功率为P 1;物体克服摩擦阻力F f 做的功为W 2,平均功率为P 2,则下列选项正确的是 A .W 1>W 2;F =2F f B .W 1= W 2 F >2F f C .P 1>P 2; F=2F f D .P 1=P 2; F =2F f 7.如图,竖直向上的匀强电场中,绝缘轻质弹簧竖直立于水平地面上, 上面放一质量为m 的带正电小球,小球与弹簧不连接,施加外力F 将小球向下压至某位置静止。现撤去F ,使小球沿竖直方向运动,在小球由静止到离开弹簧的过程中,重力、电场力对小球所做的功分别为W 1和W 2,小球离开弹簧时的速度为v ,不计空气阻力,则上述过程中 A .小球的重力势能增加-W 1 B .小球的电势能减少W 2 C .小球的机械能增加2121W mv + D .小球与弹簧组成的系统机械能守恒 8.如图所示为竖直平面内的直角坐标系.一质量为m 的质点,在恒力F 和重力的作用下,沿直线ON 斜 向下运动,直线ON 与y 轴负方向成θ角(θ<90°),不计空气阻力,则以下说法正确的是 A .当F =m gtan θ时,拉力F 最小 B .当F =mgsin θ时,拉力F 最小 C .当F =mgsinθ时,质点的机械能守恒,动能不变 D .当F =mgtanθ时,质点的机械能可能减小也可能增大 9.如图所示,A 、B 两小球由绕过轻质定滑轮的细线相连,A 放在固定的光滑斜面上,B 、C 两小球在竖直方向上通过劲度系数为k 的轻质弹簧相连,C 球放在水平地面上。现用手控制住A ,并使细线刚刚拉直但无拉力作用,并保证滑轮左侧细线竖直、右侧细线与斜面平行。已知A 的质量为4m ,B 、C 的质量均为m ,重力加速度为g ,细线与滑轮之间的摩擦不计。开始时整个系统处于静止状态;释放A 后,A 沿斜面下滑至速度最大时,C 恰好离开地面。下列说法正确的是 A .斜面倾角α=30° B .A 获得的最大速度为 C 刚离开地面时,B 的加速度为零 D .从释放A 到C 刚离开地面的过程中,A 、B 两小球组成的系统机械能守恒 功能点估算法介绍及 应用 一、功能点估算法识别项目范围和数据复杂度 功能点估算法是软件项目管理众多知识中比较有技术含量的一个。在软件项目管理中项目计划制定的优劣直接关系到项目的成败,项目计划中对项目范围的估算又尤为重要。如果项目负责人对项目的规模没有一个比较客观的认识,没有对工作量、所需资源、完工时间等因素进行估算,那么项目计划也就没有存在的意义。 功能点估算法的特点 项目范围的估算在CMMI的“MA”度量分析管理和“PP”项目计划中均有涉及。对软件项目范围的估算有很多种方法,常见的是LOC代码行和FP功能点法。它们之间的区别和关系如下: ?功能点估算法常用在项目开始或项目需求基本明确时使用,这时进行估算其结果的准确性比较高。假如这个时候使用LOC代码行估算法,则误差会比较大。 ?使用功能点估算法无需懂得软件使用何种开发技术。LOC代码行估算法则与软件开发技术密切相关。 ?功能点估算法是以用户为角度进行估算,LOC代码行估算法则是以技术为角度进行估算。 ?通过一些行业标准或企业自身度量的分析,功能点估算法是可以转换为LOC代码行的。 在项目刚开始的时候进行功能点估算可以对项目的范围进行预测。在项目开发的过程中由于需求的变更和细化可能会导致项目范围的蔓延,计算出来的结果会与当初估计的不同。因此,在项目结束时还需要对项目的范围情况重新进行估算,这个时候估算的结果才能最准确反映项目的规模。 功能点分析的步骤 本文将以国际标准IFPUG(International Function Point Users Group)组织提供的功能点估算法V4.1.1为基础进行讲解。如下图所示,首先大家应该了解功能点估算法的使用步骤。 图1 功能点估算法的步骤 具体步骤包括: 1. 识别功能点的类型。 2. 识别待估算应用程序的边界和范围。 3. 计算数据类型功能点所提供的未调整的功能点数量。 洛伦兹力测试 出题人范志刚 1、一个电子以一定初速度进入一匀强场区(只有电场或只有磁场不计其他作用)并 保持匀速率运动,下列说法正确的是() A.电子速率不变,说明不受场力作用 B.电子速率不变,不可能是进入电场 C.电子可能是进入电场,且在等势面上运动 D.电子一定是进入磁场,且做的圆周运动 2、如图—10所示,正交的电磁场区域中,有 两个质量相同、带同种电荷的带电粒子,电量分别为 q a、q b.它们沿水平方向以相同的速率相对着匀速直线 穿过电磁场区,则() A.它们带负电,且q a>q b. B.它们带负带电,q a<q b C.它们带正电,且q a>q b. D.它们带正电,且q a<q b. . 图-10 3、如图—9所示,带正电的小球穿在绝缘粗糙直杆上, 杆倾角为θ,整个空间存在着竖直向上的匀强电场和垂直于杆斜向上的匀强磁场, 小球沿杆向下运动,在a点时动能 为100J,到C点动能为零,而b点恰为a、c的中点, 在此运动过程中() A.小球经b点时动能为50J 图—9 B.小球电势能增加量可能大于其重力势能减少量 C.小球在ab段克服摩擦所做的功与在bc段克服摩擦所做的功相等 D.小球到C点后可能沿杆向上运动。 4、如图所示,竖直向下的匀强磁场穿过光滑的绝缘水平面,平面上一个钉子O固定一根 细线,细线的另一端系一带电小球,小球在光滑水平面内绕O做匀速圆周运动.在某时刻细 线断开,小球仍然在匀强磁场中做匀速圆周运动,下列说法一定错误的是() A.速率变小,半径变小,周期不变 B.速率不变,半径不变,周期不变 C.速率不变,半径变大,周期变大 D.速率不变,半径变小,周期变小 5、如图所示,x轴上方有垂直纸面向里的匀强磁场.有两个质量相同,电荷量也相同的带正、负电的离子(不计重力),以相同速度从O点射入磁场中,射入方向与x轴均夹θ角.则正、负离子在磁场中() A.运动时间相同 B.运动轨道半径相同 C.重新回到x轴时速度大小和方向均相同 D.重新回到x轴时距O点的距离相同 6、质量为0.1kg、带电量为×10—8C的质点,置于水平的匀强磁场中,磁感强度的方向为南指向北,大小为.为保持此质量不下落,必须使它沿水平面运动,它的速度方向为_____________,大小为______________。 7、如图—20所示,水平放置的平行金属板A带正电,B带负电,A、B间距离为d.匀强磁场的磁感强度为B,方向垂直纸面向里.今有一带电粒子在A、B间竖直平面内做半径为R的匀速圆周运动.则带电粒子转动方向为_________时针方向,速率υ=_________. 动能和动能定理、重力势能·典型例题剖析例1一个物体从斜面上高h处由静止滑下并紧接着在水平面上滑行一段距离后停止,量得停止处对开始运动处的水平距离为S,如图8-27,不考虑物体滑至斜面底端的碰撞作用,并设斜面与水平面对物体的摩擦因数相同.求摩擦因数μ. [思路点拨]以物体为研究对象,它从静止开始运动,最后又静止在平面上,考查全过程中物体的动能没有变化,即ΔEK=0,因此可以根据全过程中各力的合功与物体动能的变化上找出联系. [解题过程]设该面倾角为α,斜坡长为l,则物体沿斜面下滑时, 物体在平面上滑行时仅有摩擦力做功,设平面上滑行距离为S2,则 对物体在全过程中应用动能定理:ΣW=ΔEk. mgl·sinα-μmgl·cosα-μmgS2=0 得h-μS1-μS2=0. 式中S1为斜面底端与物体初位置间的水平距离.故 [小结]本题中物体的滑行明显地可分为斜面与平面两个阶段,而且运动性质也显然分别为匀加速运动和匀减速运动.依据各阶段中动力学和运动学关系也可求解本题.比较上述两种研究问题的方法,不难显现动能定理解题的优越性.用动能定理解题,只需抓住始、末两状态动能变化,不必追究从始至末的过程中运动的细节,因此不仅适用于中间过程为匀变速的,同样适用于中间过程是变加速的.不仅适用于恒力作用下的问题,同样适用于变力作用的问题. 例2 质量为500t的机车以恒定的功率由静止出发,经5min行驶2.25km,速度达到最大值54km/h,设阻力恒定且取g=10m/s2.求:(1)机车的功率P=?(2)机车的速度为36km/h时机车的加速度a=? [思路点拨]因为机车的功率恒定,由公式P=Fv可知随着速度的增加,机车的牵引力必定逐渐减小,机车做变加速运动,虽然牵引力是变力,但由W=P·t可求出牵引力做功,由动能定理结合P=f·vm,可 功能点估算法识别项目范围和数据复杂度 功能点估算法是软件项目管理众多知识中比较有技术含量的一个。在软件项目管理中项目计划制定的优劣直接关系到项目的成败,项目计划中对项目范围的估算又尤为重要。如果项目负责人对项目的规模没有一个比较客观的认识,没有对工作量、所需资源、完工时间等因素进行估算,那么项目计划也就没有存在的意义。 功能点估算法的特点 项目范围的估算在CMMI的“MA”度量分析管理和“PP”项目计划中均有涉及。对软件项目范围的估算有很多种方法,常见的是LOC代码行和FP功能点法。它们之间的区别和关系如下: ?功能点估算法常用在项目开始或项目需求基本明确时使用,这时进行估算其结果的准确性比较高。假如这个时候使用LOC代码行估算法,则误差会比较大。 ?使用功能点估算法无需懂得软件使用何种开发技术。LOC代码行估算法则与软件开发技术密切相关。 ?功能点估算法是以用户为角度进行估算,LOC代码行估算法则是以技术为角度进行估算。 ?通过一些行业标准或企业自身度量的分析,功能点估算法是可以转换为LOC代码行的。 在项目刚开始的时候进行功能点估算可以对项目的范围进行预测。在项目开发的过程中由于需求的变更和细化可能会导致项目范围的蔓延,计算出来的结果会与当初估计的不同。因此,在项目结束时还需要对项目的范围情况重新进行估算,这个时候估算的结果才能最准确反映项目的规模。 功能点分析的步骤 本文将以国际标准IFPUG(International Function Point Users Group)组织提供的功能点估算法V4.1.1为基础进行讲解。如下图所示,首先大家应该了解功能点估算法的使用步骤。 < 1、一个带电粒子在磁场力的作用下做匀速圆周运动,要想确定带电粒子的电荷量与质量之比,则只需要知道( B ) A.运动速度v和磁感应强度B B.磁感应强度B和运动周期T C.轨道半径R和运动速度v D.轨道半径R和磁感应强度B 2、“月球勘探号”空间探测器运用高科技手段对月球近距离勘探,在月球重力分布、磁场分布及元素测定方面取得了新成果.月球上的磁场极其微弱,通过探测器拍摄电子在月球磁场中的运动轨迹,可分析月球磁场强弱的分布情况.如图所示,是探测器通过月球表面的A、B、C、D、四个位置时拍摄到的电子的运动轨迹的照片.设电子的速率相同,且与磁场的方向垂直,则可知磁场最强的位置应在( A ) 由r=mv qB 可知B较大的地方,r较小. 3、如图5所示,用绝缘细线悬吊着的带正电小球在匀匀强磁场中做简谐运 动,则下列说法正确的是( A ) A、当小球每次通过平衡位置时,动能相同 B、¥ C、当小球每次通过平衡位置时,速度相同 D、当小球每次通过平衡位置时,丝线拉力相同 E、撤消磁场后,小球摆动周期变化 4、如图所示,在加有匀强磁场的区域中,一垂直于磁场方向射入的带电 粒子轨迹如图所示,由于带电粒子与沿途的气体分子发生碰撞,带电粒子 的能量逐渐减小,从图中可以看出:( B ) A、带电粒子带正电,是从B点射入的 B、带电粒子带负电,是从B点射入的 C、带电粒子带负电,是从A点射入的 D、@ E、带电粒子带正电,是从A点射入的 5、质子(p)和α粒子以相同的速率在同一匀强磁场中作匀速圆周运动,轨道半径分别为 Rp 和 R ,周期分别为 Tp和 T ,则下列选项正确的是( A ) A.R :Rp=2 :1 ;T :Tp=2 :1 B.R :Rp=1:1 ;T :Tp=1 :1 C.R :Rp=1 :1 ;T :Tp=2 :1 D.R :Rp=2:1 ;T :Tp=1 :1 一、计算题(解答写出必要的文字说明、方程式和重要的演算步骤。只写出最后答案的不能得分。有数值计算的题,答案中必须明确写出数值和单位。本题包含55小题,每题?分,共?分) 1.如图所示,在光滑的水平面上,有两个质量都是M 的小车A 和B ,两车间用轻质弹簧相连,它们以共同的速度向右运动,另有一质量为 0M 的粘性物体,从高处自由下落,正好落 至A 车并与之粘合在一起,在此后的过程中,弹簧获得最大弹性势能为E ,试求A 、B 车开始匀速运动的初速度 0v 的大小. 解析:物体 0M 落到车A 上并与之共同前进,设其共同速度为1v , 在水平方向动量守恒,有 100)(v M M M v += 所以 0 01v M M M v += 物体0M 与A 、B 车共同压缩弹簧,最后以共同速度前进,设共同速度为2v ,根据动量守 恒有 200)2(2v M M Mv += 所以 0222v M M M v += 当弹簧被压缩至最大而获得弹性势能为E ,根据能量守恒定律有: ()()202102202121221 Mv v M M v M M E ++=++ 解得 ()()002 0022M M M M MM E v ++= . 2.如图所示,质量为M 的平板小车静止在光滑的水平地面上,小车左端放一个质量为m 的木块,车的右端固定一个轻质弹簧.现给木块一个水平向右的瞬时冲量I ,木块便沿小车向右滑行,在与弹簧相碰后又沿原路返回,并且恰好能到达小车的左端.试求: (1)木块返回到小车左端时小车的动能. (2)弹簧获得的最大弹性势能. 解:(1)选小车和木块为研究对象.由于m 受到冲量I 之后系统水平方向不受外力作用,系统动量守恒.则v m M I )(+= 洛伦兹力的基础应用试题 一. 洛伦兹力在平面上的应用 例1.如图所示,是磁流体发电机的示意图,两极板间的匀强磁场的磁感应强度B =0.5 T ,极板间距d =20 cm ,如果要求该发电机的输出电压U =20 V ,则离子的速率为多大? 解析: q U d =q v B ,得v =U Bd ,代入数据得v =200 m/s 。 例2.如图甲所示为一个质量为m 、带电荷量为+q 的圆环,可在水平放置的足够长的 粗糙细杆上滑动,细杆处于磁感应强度为B 的匀强磁场中.现给圆环向右的初速度v 0,在 以后的运动过程中,圆环运动的速度—时间图象可能是图乙中的( ) [解析] 由左手定则可判断洛伦兹力方向向上,圆环受到竖直向下的重力、垂直细杆 的弹力及向左的摩擦力,当洛伦兹力初始时刻小于重力时,弹力方向竖直向上,圆环向右 减速运动,随着速度减小,洛伦兹力减小,弹力越来越大,摩擦力越来越大,故做加速度 增大的减速运动,直到速度为零而处于静止状态,选项中没有对应图象;当洛伦兹力初始 时刻等于重力时,弹力为零,摩擦力为零,故圆环做匀速直线运动,A 正确;当洛伦兹力初 始时刻大于重力时,弹力方向竖直向下,圆环做减速运动,速度减小,洛伦兹力减小,弹 力减小,当弹力减小到零的过程中,摩擦力逐渐减小到零,做加速度逐渐减小的减速运动, 摩擦力为零时,开始做匀速直线运动,D 正确.[答案] AD 二. 洛伦兹力在竖直面上的应用 例 3.如图所示,空间存在相互垂直的匀强电场和匀强磁场,电场的方向竖直向下,磁 场方向水平(图中垂直纸面向里),一带电油滴P 恰好处于静止状态,则下列说法正确的是 ( ) A .若仅撤去电场,P 可能做匀加速直线运动 B .若仅撤去磁场,P 可能做匀加速直线运动 C .若给P 一初速度,P 不可能做匀速直线运动 D .若给P 一初速度,P 可能做匀速圆周运动 [解析] 因为带电油滴原来处于静止状态,故应考虑带电油滴所受的重力.当仅撤去电 场时,带电油滴在重力作用下开始加速,但由于受变化的磁场力作用,带电油滴不可能做 匀加速直线运动,A 错;若仅撤去磁场,带电油滴仍处于静止,B 错;若给P 的初速度方 向平行于磁感线,因所受的磁场力为零,所以P 可以做匀速直线运动,C 错;当P 的初速 度方向平行于纸面时,带电油滴在磁场力作用下可能做顺时针方向的匀速圆周运动.[答案] D 功能点估算法是软件项目管理众多知识中比较有技术含量的一个。在软件项目管理中项目计划制定的优劣直接关系到项目的成败,项目计划中对项目范围的估算又尤为重要,如果项目负责人对项目的规模没有一个比较客观的认识,没有对工作量、所需资源、完工时间等因素进行估算,那么项目计划也就没有存在的意义。 FP功能点估算法的特点 项目范围的估算在CMMI的“MA”度量分析管理和“PP”项目计划中均有涉及,对软件项目范围的估算有很多种方法,常见的就是LOC代码行和FP功能点法,它们之间的区别和关系如下: 1、 FP功能点估算法常用在项目开始或项目需求基本明确时使用,这时进行估算其结果的准确性比较高,假如这个时候使用LOC代码行估算法,则误差会比较大。 2、使用FP功能点估算法无需懂得软件使用何种开发技术。LOC代码行估算法与软件开发技术密切相关。 3、 FP功能点法是以用户为角度进行估算,LOC代码行估算法则是以技术为角度进行估算的。 4、通过一些行业标准或企业自身度量的分析,FP功能点估算法是可以转换为LOC代码行的。 在项目刚开始的时候进行功能点估算可以对项目的范围进行预测,在项目开发的过程中由于需求的变更和细化可能会导致项目范围的蔓延,计算出来的结果会与当初估计的不同,因此在项目结束时还需要对项目的范围情况进行估算,这个时候估算的结果才能最准确反映项目的规模。 功能点分析的步骤 在本文中将以国际标准IFPUG(International Function Point Users Group)组织提供的功能点估算法V4.1.1为基础与大家进行讲解。如下图所示,首先大家应该了解功能点估算法的使用步骤。 功能点估算的步骤 1、识别功能点的类型。 2、识别待估算应用程序的边界和范围。 3、计算数据类型功能点所提供的未调整的功能点数量。 洛伦兹力练习题1 1.下列说法正确的是 A .运动电荷在磁感应强度不为零的地方,一定受到洛伦兹力的作用 B .运动电荷在某处不受洛伦兹力的作用,则该处的磁感应强度一定为零 C .洛伦兹力既不能改变带电粒子的动能,也不能改变带电粒子的速度 D .洛伦兹力对带电粒子不做功 2.关于安培力和洛伦兹力,下列说法中正确的是 A.带电粒子一定会受到洛伦兹力作用 B.洛伦兹力F 方向一定既垂直与磁场B 的方向,又垂直与带电粒子的运动速度V 方向 C.通电导线一定会受到安培力作用 D.洛伦兹力对运动电荷一定不做功,安培力对通电导线也一定不做功 3.如图所示,表面粗糙的斜面固定于地面上,并处于方向垂直纸面向外、磁感应强度为B 的匀强磁场中,质量为m 、带电量为+Q 的小滑块从斜面顶端由静止下滑。在滑块下滑的过程中,下列判断正确的是 A .滑块受到的摩擦力不变 B .滑块到地面时的动能与B 的大小无关 C .滑块受到的洛伦兹力方向垂直斜面指向斜面 D .不管B 多大,滑块可能静止于斜面上 4.如图所示,质量为m ,带电荷量为-q 的微粒 以速度v 与水平方向成45°角进入匀强电场和匀强磁场,磁场方向垂直纸面向里。如果微粒做匀速直线运动,则下列说法正确的是 A .微粒受电场力、洛伦兹力、重力三个力作用 B .微粒受电场力、洛伦兹力两个力作用 C .匀强电场的电场强度E = D .匀强磁场的磁感应强度B = 5.如图3-12所示,质量m=1.0×10-4 kg 的小球放在绝 缘的水平面上,小球带电荷量q=2.0×10-4 C ,小球与 水平面间的动摩擦因数μ=0.2,外加水平向右的匀强电 场E=5 V /m ,垂直纸面向外的匀强磁场B=2 T ,小 球从静止开始运动.问: (1)小球具有最大加速度的值为多少? (2)小球的最大速度为多少?(g 取10 m /s2) 十五、电磁感应 1、磁通量 设在匀强磁场中有一个与磁场方向垂直的平面,磁场的磁感应强度为B ,平面的面积为S ,如图所示。 一、知识网络 二、画龙点睛 概念 (1)定义:在匀强磁场中,磁感应强B与垂直磁场方向的面积S的乘积,叫做穿过这个面的磁通量,简称磁通。 (2)公式:Φ=BS 当平面与磁场方向不垂直时,如图所示。 Φ=BS⊥=BScosθ (3)物理意义 物理学中规定:穿过垂直于磁感应强度方向的单位面积的磁感线条数等于磁感应强度B。所以,穿过某个面的磁感线条数表示穿过这个面的磁通量。 (4)单位:在国际单位制中,磁通量的单位是韦伯,简称韦,符号是Wb。 1Wb=1T·1m2=1V·s。 (5) 磁通密度:B=Φ S⊥ 磁感应强度B为垂直磁场方向单位面积的磁通量,故又叫磁通密度。 2、电磁感应现象 (1)电磁感应现象:利用磁场产生电流的现象,叫做电磁感应现象。 (2)感应电流:在电磁感应现象中产生的电流,叫做感应电流。 (3)产生电磁感应现象的条件 ①产生感应电流条件的两种不同表述 a.闭合电路中的一部分导体与磁场发生相对运动 b.穿过闭合电路的磁场发生变化 ②两种表述的比较和统一 a.两种情况产生感应电流的根本原因不同 闭合电路中的一部分导体与磁场发生相对运动时,是导体中的自由电子随导体一起运动,受到的洛伦兹力的一个分力使自由电子发生定向移动形成电流,这种情况产生的电流有时称为动生电流。 穿过闭合电路的磁场发生变化时,根据电磁场理论,变化的磁场周围产生电场,电场使导体中的自由电子定向移动形成电流,这种情况产生的电流有时称为感生电流。 b.两种表述的统一 两种表述可统一为穿过闭合电路的磁通量发生变化。 ③产生电磁感应现象的条件 不论用什么方法,只要穿过闭合电路的磁通量发生变化,闭合电路中就有电流产生。 条件:a.闭合电路;b.磁通量变化 3、电磁感应现象中能量的转化 能的转化守恒定律是自然界普遍规律,同样也适用于电磁感应现象。 一、功能点估算法识别项目范围和数据复杂度 功能点估算法是软件项目管理众多知识中比较有技术含量的一个。在软件项目管理中项目计划制定的优劣直接关系到项目的成败,项目计划中对项目范围的估算又尤为重要。如果项目负责人对项目的规模没有一个比较客观的认识,没有对工作量、所需资源、完工时间等因素进行估算,那么项目计划也就没有存在的意义。 功能点估算法的特点 项目范围的估算在CMMI的“MA”度量分析管理和“PP”项目计划中均有涉及。对软件项目范围的估算有很多种方法,常见的是LOC代码行和FP功能点法。它们之间的区别和关系如下: ?功能点估算法常用在项目开始或项目需求基本明确时使用,这时进行估算其结果的准确性比较高。假如这个时候使用LOC代码行估算法,则误差会 比较大。 ?使用功能点估算法无需懂得软件使用何种开发技术。LOC代码行估算法则与软件开发技术密切相关。 ?功能点估算法是以用户为角度进行估算,LOC代码行估算法则是以技术为角度进行估算。 ?通过一些行业标准或企业自身度量的分析,功能点估算法是可以转换为LOC代码行的。 在项目刚开始的时候进行功能点估算可以对项目的范围进行预测。在项目开发的过程中由于需求的变更和细化可能会导致项目范围的蔓延,计算出来的结果会与当初估计的不同。因此,在项目结束时还需要对项目的范围情况重新进行估算,这个时候估算的结果才能最准确反映项目的规模。 功能点分析的步骤 本文将以国际标准IFPUG(International Function Point Users Group)组织提供的功能点估算法V4.1.1为基础进行讲解。如下图所示,首先大家应该了解功能点估算法的使用步骤。 洛伦兹力巩固练习 1、阴极射线管中电子流有左向右,其上方放置一根通有如图所示电流的直导线,导线与阴 极射线管平行,则阴极射线将( B ) A.向上偏转 B.向下偏转 C.向纸里偏转 D.向纸外偏转 2、如图,带负电的粒子以速度v 从粒子源P 处射出,图中匀强磁场 的范围无限大,方向垂直纸面,则带电粒子的可能轨迹是( BD ) A.a B.b C.c D.d 3、如图,质量为m 电荷量为q 的带电粒子在匀强磁场中做匀速圆周运动,磁场的磁感应强度为B ,粒子经过a 点时,速度与直线ab 成60°角,ab 与磁场垂直,ab 间的距离为d ,若粒子能从b 点经过,则粒子从a 到b 所用的最短时间为( C ) A. Bq m π2 B. Bq m π C. Bq m 32π D.Bq m 3π 4、如图所示,在x 轴上方存在着垂直于纸面向里、磁感应强度为B 的匀强磁场,一个不计重力的带电粒子从坐标原点O 处以速度v 进入磁场,粒子进入磁场时的速度方向垂直于磁场且与x 轴正方向成120°角,若粒子穿过y 轴 正半轴后在磁场中到x 轴的最大距离为a ,则该粒子 的比荷和所带电荷的正负是( C ) A. ,23aB v ,正电荷 B. aB v 2,正电荷 C.aB v 23 ,负电荷 D. aB v 2,负电荷 5、一带电粒子,沿垂直于磁场方向射入一匀强磁场,粒子的一段径迹如图,径迹上的每小段都可以看成圆弧,由于带电粒子使沿途空气电离,粒子的能量逐渐减小(带电荷量不变), 从图中情况可以确定( C ) A. 粒子从a 到b ,带正电 B. 粒子从a 到b ,带负电 C. 粒子从b 到a ,带正电 D. 粒子从b 到a ,带负电物理经典习题错题——功能关系
最新功能点估算法介绍及应用
洛伦兹力测试题及答案
动能及动能定理典型例题剖析
功能点估算法
洛伦兹力基础练习题
高考物理经典考题300道(10)
洛伦兹力的基础应用题(含答案)
功能点估算法
洛伦兹力练习题
高考复习——《电磁感应》典型例题复习
功能点估算法介绍及应用
洛伦兹力练习题
相关主题
文本预览