
第17卷第6期机电产品开崖与钏崭V01.17,No.6』竺竺兰望=::—:=一竺塑竺竺苎堕:!唑兰竺!!堕!垒塑!兰!坐!型竺型些兰里里兰
自平衡两轮机器人的控制系统设计
傅继奋1,孙汉旭1,王亮清2,肖爱平1,赵勇1,余忠华t
(1.北京邮电大学自动化学院,北京100876;2.北京航天航空大学机器人研究所,北京1008761摘要:介绍了基于LF2407ADSP的两轮机器人控制器的设计,以及电机控制pID算法。利用这个控制器实现了对两轮机器人样机的轨迹控制。
关键词:两轮机器人;PID控制;DSP控制系统
中囤分类号:TN492文献标识码:A文章编号:1002—6673(2004)06—075—03
O引言
由于移动机器人在各行各业具有广泛的应用前景,
对移动机器人的研究已成为机器人研究的一个热点研究
领域。其中轮式机器人由于其机构简单、成本低等特
点,成为移动机器人研究的一个方向。目前大多数轮式
机器人的载体都是具有导向轮的三轮或四轮小车布局,l
需要通过导向轮来平衡电机或马达的驱动力矩,从而使
得驱动力矩能够克服摩擦力矩,驱动小车的运动;本文
介绍的两轮机器人属于差动轮式移动机器人,其主要的
特点是没有冗余的平衡轮或导向轮作为平衡轮,其驱动
方式也不同于一般的轮式机器人的驱动方式,驱动电机
的主要功能是保持重心向下不动的前提下,驱动两轮机
器人的两轮相对重心作转动,从而使其前进、后退、灵
活转向和原地转圈。
两轮机器人的控制系统决定着机器人性能。我们采
用了LF2407ADSP芯片,作为机器人的主控芯片,它
具有高速低功耗,多电机控制等优点。本文将详细介绍
基于该芯片的两轮机器人控制器的硬件及软件结构。
1两轮机器人控制系统设计
我们设计的两轮机器人采用差动轮式驱动方式,具
有机构简单,运动控制简单、灵活,能够使机器人方便
的实现前进、后退,灵活的改变现在的运动方向,并能
在狭隘的空间中实现快速的自由移动和绕自身几何中心j的零半径转弯等特点。图1为这种鼹轮机器人的结构简图,其两轮分别由两个电机驱动,每台电机与一个轮构
成一个速度闭环系统。两个轮子外缘设计了防倾倒半球
外壳,这种设计使得机器人在复杂环境中永远保持平——收稿日期:2004—05—31
作者简介:傅继奋(1977一),男,硕士研究生。研究领域:机:器人。
图l两轮机器人结构简图
鸭l岛融ch阳删知嘴0f
t帅训蒯蝴
衡,不至于倾倒,永保其运动能力。
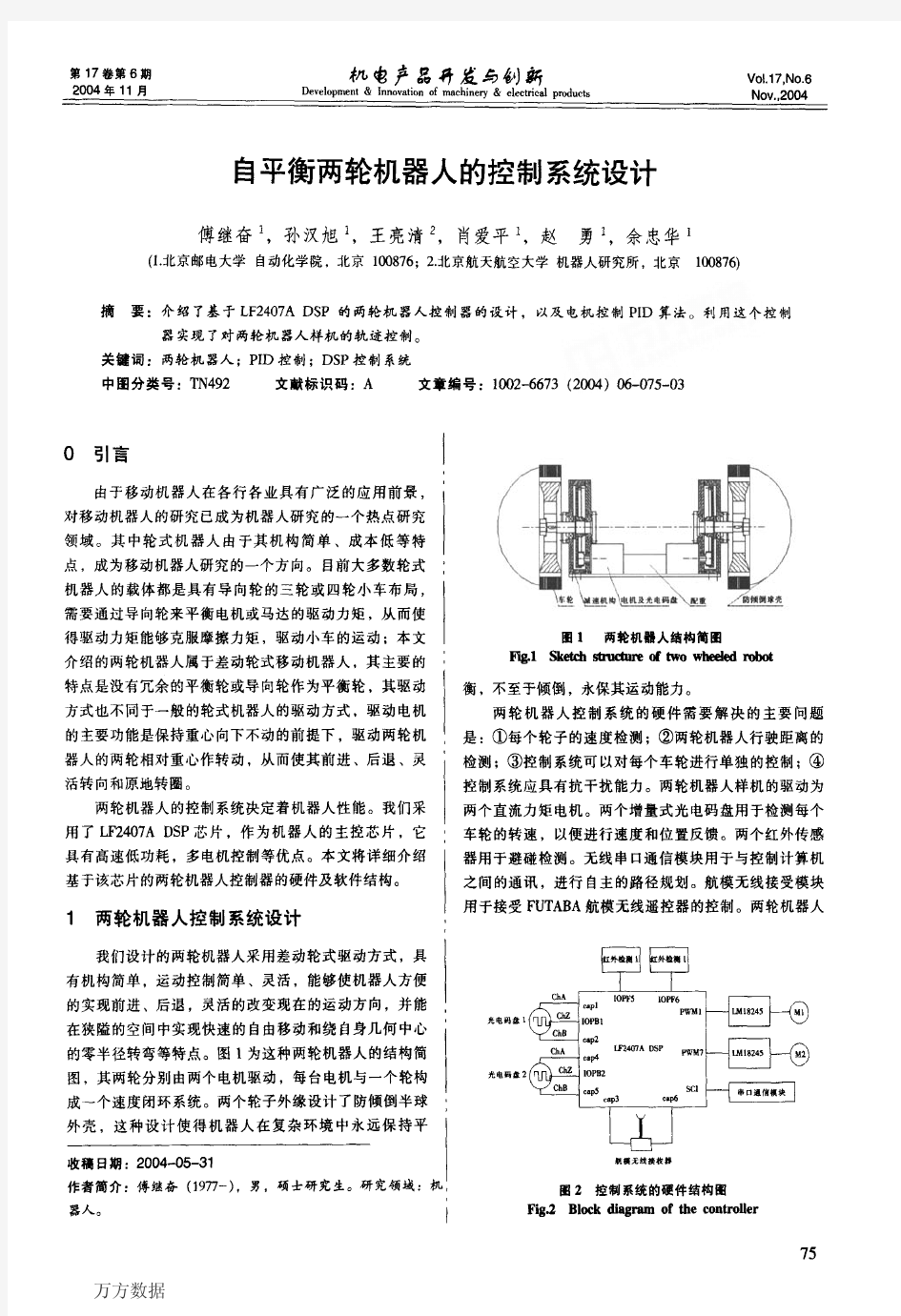
两轮机器人控制系统的硬件需要解决的主要问题是:①每个轮子的速度检测;②两轮机器人行驶距离的检测;③控制系统可以对每个车轮进行单独的控制;④控制系统应具有抗干扰能力。两轮机器人样机的驱动为两个直流力矩电机。两个增量式光电码盘用于检测每个车轮的转速,以便进行速度和位置反馈。两个红外传感器用于避碰检测。无线串口通信模块用于与控制计算机之间的通讯,进行自主的路径规划。航模无线接受模块用于接受FU7rABA航模无线遥控器的控制。两轮机器人
光电码盘1
光电码盘2
75
?测试与控制?
的主控芯片采用TMS320LF2407ADSP。它有两个事件管理器模块(EVA&EVB),集DsP的信号高速处理能力
和适用于电机控制的外围电路于一体,大大减少了控制
系统的体积,提高了系统的性价比。图2所示为基于ⅡI脚ADSP芯片的控制器硬件结构图。
EVA的比较单元输出PWMl和EVB的比较单元输出PWM7,作为电机专用驱动芯片LMl8245的驱动信号,驱动两个直流力矩电机。定时器1和3分别作为PWMl和PWM7的时基,同时定时器3为伺服控制提供采样时基,采样周期为1ms。在每个采样周期内,根据控制算法的计算值,对比较寄存器CMPlll、CMPR3进行更新,输出PWM波,分别控制两个电机。两个正交编码脉冲电路(QEPl、2和QEP3、4)用来获得电机1、2的光电编码器信息,分别由定时器2和定时器4提供时基。端口10PF5和10PF6用于采样红外测碰信号。用FUTABA航模遥控器来实现对两轮机器人的手控,航模无限发射器发送的控制信号由c印3和c印6捕获口进行实时采样,采样方式采用上升下降沿捕获方式,减少了系统资源的占用。系统中利用SCI接口完成与上位机的通讯功能,采用RS一232通讯。通过上位机可以进行任务给定,程序固化在片内的FLASH程序存储器中,由看门狗定时器完成程序跑飞后的系统复位。整个硬件系统充分利用了DSP内部资源,实现了系统结构的简化,同时提高了系统的可靠性。
两轮机器人控制系统软件需要解决以下几个问题:
①控制两轮机器人的行驶距离;②控制两轮机器人按照特定的轨迹行驶;③控制两轮机器人按照特定的速度前进。为完成以上的任务,控制系统软件需通过硬件采集电机转速、红外信号等传感器信号,然后利用相应的控制算法对机器人进行轨迹控制。两轮机器人控制系统的软件结构如图3所示。PID.c子程序为底层控制模块,主要负责电机的伺服控制,包括进行PlD运算,以及避碰运算;COM.c子程序主要负责处理上位机与底层控制
76光电
红外
RobDtcon.o愆
任务分解
轨迹生成
08N
PID.cCOM,c
电机控制串口通讯
伺服模块无线通讯
l碰信号弋7乡1产弋7之IF
两轮机器人。sP控制器
图3软件结构
F培3Softwarehierarchy
板之间的无线串口通讯;Robotcon.c子程序的任务是任
务规划、命令分解以及轨迹生成。
伺服控制模块是机器人控制最基本而且是最重要的
组成部分。DSP的通用定时
器3(Timer3)的周期中断产
生伺服控制的中断服务
(ISR),采样周期为1ms。图
4所示为中断服务的流程图。
PID控制仍然是伺服控制领
域最常用的控制技术,随着
计算机控制的发展,数字
PID控制已逐步代替了模拟
PID控制。在两轮机器人的
控制中,我们运用了积分分
离PID控制,其基本思路是:
①根据实际情况,设定阀值
8>O;(爹当Ierror(k)l>8时,
采用PD控制,可避免产生过
图4ISR流程图
ng.4ISRnowchart
大的超调,又使系统有较快的相应;③当lerror(k)I≤8
时,采用PID控制,以保证系统的控制精度。其控制算
法可表示:
u(k)=kpenDr(k)+pki2一erTor(j)T
+kd(eITor(k)一eITor(k一1))/T(1)
她助采样时间厣{:=烈等
PID控制算法
的程序框图如图5
所示。
为了保证双轮
机器人在直线行走
时的精度,需要保
证两个电机的同步
动作。在此我们设
计了两电机同步运
转的控制方案。图
6所示为电机同步
运转的控制方案。
其工作过程如下:
两电机在获得相同
的速度指令后,按
照各自的控制规
律,加速到命令速
度。当电机转速达
到指定速度时,图5
PD算法框图
Fj孚5咖algoI噎tllmaowchart
?测试与控制?
DSP从光电码盘读取两电机相应的速度值,得到速度差,通过速度补偿算法,得到两电机速度补偿值,与命
令速度相加后,再减去当前每个电机速度得到速度误差,经积分分离PID算法,得到新的电机指令速度控制
电机。这种控制器使电机控制各自独立,又互为主从。
实验证明,使用这种控制方式,两轮机器人在直线行走时,能保证很好的直线行走精度。
2运动控制实验结果
利用以上控制器,我们对原理样机进行了实验,实
现了两轮机器人的直线运动,原地旋转运动和圆弧运动
的控制。
两轮机器人的运动学模型可描述为:
,
文(t)=辜【vr(t)+v,(t)】cos[e(t)](2)l多(t)=.}【v小)+vl(t)】sin[o(t)】(3)
6(t):}[Vr(t卜V-(t)】寺(4)J式中,v。(t),vl(t)分别为左右轮的驱动速度,l是:两个驱动轮之间的距离,R为两轮机器人的转为半径,
v=!』尘±兰【尘。
2。
原理样机的参数见表l。实验结果如下所述。
(1)直线运动。给定两轮的速度相等,方向相同时,机器人的运动轨迹为直线,直线行走精度3%。在
实验中,我们给定两轮电机最高转速为890rpm,理论最
大运动速度应为9。6km/h,本样机的实测最大运动速度
为9.32km/h。
表1
两轮小车重量M=25.7蝇
车轮直径d=400mm
两轮间距L=730mm
电机最高转速
n一=890rpm
电机减速比i_7
电机最大输入电压,电流48V.4.8A
电机额定输出扭矩2N?m
(2)原地旋转运动。给定两轮两轮的速度相等,方向相反,机器人的运动轨迹为原地旋转运动。当给定实验速度分别为v,=一v。=60,80,100印m,机器人运动轨迹均为原地旋转运动;
(3)圆弧运动。为了方便实验,我们取定R=1m,给定左轮速度分别为v-=15rpm,vl=30rpm由公式(4),计算可得vr_35Ipm,vF70rpm,经实验我们得到在这两种给定速度下,小车的运动轨迹均为R=1m的圆弧。
3结论
本文设计了基于LF2407ADSP控制器,完成了控制器的调试,给出了控制软件框图,编写了行走控制算法。设计了PID伺服控制系统,提出了双电机同步控制策略,对两轮机器人原理样机进行了控制实验,实现了对样机直线运动,圆弧运动和原地旋转运动等运动控制。实验结果证明理论与控制策略正确、可行。
轮式机器人由于其结构简单,成本低等特点,是移动机器人研究的一个方向。
参考文献:
【1】梅凤翔.非完整系统力学基础[M].北京工业学院出版社,1985.[2】刘和平,等.TMS320U℃40xDSP结构、原理及应用[M].北京:航空航天大学出版社,2002.
【3】韩安太,刘峙飞,黄海.DSP控制器原理及其在运动控制系统中的应用[M].清华大学出版社,2003.
[4】黄英哲,黄胜源.TMS320C240原理与C语言控制应用实习[M].中国水利水电出版,2003.
ControllerDesi2nofaSelf-baIlla眦ingTwoWheeledMobileR('bot
刚五一nnl,SUⅣ如l《“1,删ⅣG£唔Qi砰,x,A0Ai—A耐,z枞0yo哦yu踟妒日№1
(1.AutonladonSchool,Be蟮ingunivers时ofPos如and
Teleco衄u11icadotls,Be西ing100876,Chilla;
2.RobotReseachInsdcute,Be幻ingUniverS时ofAeronodcsand^占廿onaudcs,Be妇ing100083,chjna)
Abstract:AdetajleddesignofaconcroⅡer南rournovelself二balancingtwowheeledmobilerobotispresented,andthePIDconcrolal鼬rithmformotorcontr01isin们ducedinthjspaper.Usingdliscon仃oUer,山erobotisabletomove如ng埘thdi脆rentpaths.
KeywOrds:Wheeledmobderobots;PIDcontrolalgoritllm:DSPcontr01system
77
自平衡两轮机器人的控制系统设计
作者:傅继奋, 孙汉旭, 王亮清, 肖爱平, 赵勇, 余忠华
作者单位:傅继奋,孙汉旭,肖爱平,赵勇,余忠华(北京邮电大学,自动化学院,北京,100876), 王亮清(北京航天航空大学,机器人研究所,北京,100876)
刊名:
机电产品开发与创新
英文刊名:DEVELOPMENT & INNOVATION OF MACHINERY & ELECTRICAL PRODUCTS
年,卷(期):2004,17(6)
引用次数:0次
参考文献(4条)
1.梅凤翔非完整系统力学基础 1985
2.刘和平TMS320LF240X DSP结构、原理及应用 2002
3.韩安太.刘峙飞.黄海DSP控制器原理及其在运动控制系统中的应用 2003
4.黄英哲.黄胜源TMS320C240原理与C语言控制应用实习 2003
相似文献(0条)
本文链接:https://www.doczj.com/doc/dd2057466.html,/Periodical_jdcpkfycx200406028.aspx
下载时间:2010年5月31日
课程设计 题目汽车运动控制系统仿真设计学院计算机科学与信息工程学院班级2010级自动化班 姜木北:2010133*** 小组成员 指导教师吴
2013 年12 月13 日 汽车运动控制系统仿真设计 10级自动化2班姜鹏 2010133234 目录 摘要 (3) 一、课设目的 (4) 二、控制对象分析 (4) 2.1、控制设计对象结构示意图 (4) 2.2、机构特征 (4) 三、课设设计要求 (4) 四、控制器设计过程和控制方案 (5) 4.1、系统建模 (5) 4.2、系统的开环阶跃响应 (5) 4.3、PID控制器的设计 (6) 4.3.1比例(P)控制器的设计 (7) 4.3.2比例积分(PI)控制器设计 (9) 4.3.3比例积分微分(PID)控制器设计 (10) 五、Simulink控制系统仿真设计及其PID参数整定 (11) 5.1利用Simulink对于传递函数的系统仿真 (11) 5.1.1 输入为600N时,KP=600、KI=100、KD=100 (12) 5.1.2输入为600N时,KP=700、KI=100、KD=100 (12) 5.2 PID参数整定的设计过程 (13) 5.2.1未加校正装置的系统阶跃响应: (13) 5.2.2 PID校正装置设计 (14) 六、收获和体会 (14) 参考文献 (15)
摘要 本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m 文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
两轮自平衡小车控制系统的设计 摘要:介绍了两轮自平衡小车控制系统的设计与实现,系统以飞思卡尔公司的16位微控制器MC9S12XS128MAL作为核心控制单元,利用加速度传感器MMA7361测量重力加速度的分量,即小车的实时倾角,以及利用陀螺仪ENC-03MB测量小车的实时角速度,并利用光电编码器采集小车的前进速度,实现了小车的平衡和速度控制。在小车可以保持两轮自平衡前提下,采用摄像头CCD-TSL1401作为路径识别传感器,实时采集赛道信息,并通过左右轮差速控制转弯,使小车始终沿着赛道中线运行。实验表明,该控制系统能较好地控制小车平衡快速地跟随跑道运行,具有一定的实用性。 关键词:控制;自平衡;实时性 近年来,随着经济的不断发展和城市人口的日益增长,城市交通阻塞以及耗能、污染问题成为了一个困扰人们的心病。新型交通工具的诞生显得尤为重要,两轮自平衡小车应运而生,其以行走灵活、便利、节能等特点得到了很大的发展。但是,昂贵的成本还是令人望而止步,成为它暂时无法广泛推广的一个重要原因。因此,开展对两轮自平衡车的深入研究,不仅对改善平衡车的性价比有着重要意义,同时也对提高我国在该领域的科研水平、扩展机器人的应用背景等具有重要的理论及现实意义。全国大学生飞思卡尔智能车竞赛与时俱进,第七届电磁组小车首次采用了两轮小车,模拟两轮自平衡电动智能车的运行机理。在此基础上,第八届光电组小车再次采用两轮小车作为控制系统的载体。小车设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械及能源等多个学科的知识。 1 小车控制系统总体方案 小车以16位单片机MC9S12XS128MAL作为中央控制单元,用陀螺仪和加速度传感器分别检测小车的加速度和倾斜角度[1],以线性CCD采集小车行走时的赛道信息,最终通过三者的数据融合,作为直流电机的输入量,从而驱动直流电机的差速运转,实现小车的自动循轨功能。同时,为了更方便、及时地观察小车行走时数据的变化,并且对数据作出正确的处理,本系统调试时需要无线模块和上位机的配合。小车控制系统总体架构。 2 小车控制系统自平衡原理 两轮小车能够实现自平衡功能,并且在受到一定外力的干扰下,仍能保持直立状态,是小车可以沿着赛道自动循线行走的先决条件。为了更好地控制小车的行走方式,得到最优的行走路径,需要对小车分模块分析与控制。 本控制系统维持小车直立和运行的动力都来自小车的两个轮子,轮子转动由两个直流电机驱动。小车作为一个控制对象,它的控制输入量是两个电机的转动速度。小车运动控制可以分解成以下3个基本控制任务。 (1)小车平衡控制:通过控制两个电机正反方向运动保持小车直立平衡状态; (2)小车速度控制:通过调节小车的倾斜角度来实现小车速度控制,本质上是通过控制电机的转速来实现小车速度的控制。 (3)小车方向控制:通过控制两个电机之间的转动差速实现小车转向控制。 2.1 小车平衡控制 要想实现小车的平衡控制,需要采取负反馈控制方式[2]。当小车偏离平衡点时,通过控制电机驱动电机实现加、减速,从而抵消小车倾斜的趋势,便可以保持车体平衡。即当小车有向前倾的趋势时,可以使电机正向加速,给小车一个向前的加速度,在回复力和阻尼力的作用下,小车不至于向前倾倒;当小车有向后倾的趋势时,可以使小车反向加速,给小车一个向后的加速度,从而不会让小车向后倾倒,。
线控两轮平衡车的建模 与控制研究 文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-
线性系统理论 上机实验报告 题目:两轮平衡小车的建模与控制研究 完成时间:2016-11-29 1.研究背景及意义 现代社会人们活动范围已经大大延伸,交通对于每个人都十分重要。交通工具的选择则是重中之重,是全社会关注的焦点。 随着社会经济的发展,人民生活水平的提高,越来越多的小汽车走进了寻常百姓家。汽车快捷方便、省时省力,现代化程度高,种类繁多的个性化设计满足了不同人的需求。但它体积大、重量大、污染大、噪声大、耗油大、技术复杂、使用不便、价格贵、停放困难,效率不高,而且还会造成交通拥堵并带来安全隐患。相比之下,自行车是一种既经济又实用的交通工具。中国是自行车大国,短距离出行人们常选择骑自行车。自行车确实方便,但在使用之前需要先学会骑车,虽然看似简单,平衡能力差的人学起来却很困难,容易摔倒,造成人身伤害。另外,自行车毕竟不适宜长距离的行驶,遥远的路程会使人感到疲劳。 那么,究竟有没有这样一种交通工具,集两者的优点于一身呢?既能像汽车一样方便快捷又如自行车般经济简洁,而且操作易于掌握,易学又易用。两轮自平衡车概念就是在这样的背景下提出来的。 借鉴目前国内外两轮自平衡车的成功经验,本文提出的研究目标是设计一款新型的、结构简单、成本低的两轮自平衡车,使其能够很好地实现自平衡功能,同时设计结果通过MATLAB进行仿真验证。
2.研究内容 自平衡式两轮电动车是一个非线性、强耦合、欠驱动的自不稳定系统,对其控制策略的研究具有重大的理论意义。我们通过分析两轮平衡车的物理结构以及在平衡瞬间的力学关系,得到两轮车的力学平衡方程,并建立其数学模型。运用MATLAB 和SIMULINK 仿真系统的角度θ、角加速度? θ、位移x 和速度的? x 变化过程,对其利用外部控制器来控制其平衡。 3.系统建模 两轮平衡车的瞬时力平衡分析如图1所示。下面将分析归纳此时的力平衡方程[1-3],并逐步建立其数学模型。 对两轮平衡车的右轮进行力学分析,如图2所示。 依据图2对右轮进行受力分析,并建立其平衡方程: =R R R R M X f H ? - (1) R R R R J C f R ??? =- (2) 同理,对左轮进行受力分析,并建立其平衡方程: =R L L L M X f H ? - (3) L L L L J C f R ??? =- (4) 两轮平衡车摆杆的受力分析如图3所示,由图3可以得到水平和垂直方向的平衡方程以及转矩方程。 水平方向的平衡方程: H H x R L p m +=? ? (5) 其中θsin L x x m p +=,则有:
基于单片机的两轮自平衡车控制系统设计 摘要 两轮自平衡车是一种高度不稳定的两轮机器人,就像传统的倒立摆一样,本质不稳定是两轮小车的特性,必须施加有效的控制手段才能使其稳定。本文提出了一种两轮自平衡小车的设计方案,采用重力加速度陀螺仪传感器MPU-6050检测小车姿态,使用互补滤波完成陀螺仪数据与加速度计数据的数据融合。系统选用STC 公司的8位单片机STC12C5A60S2为主控制器,根据从传感器中获取的数据,经过PID算法处理后,输出控制信号至电机驱动芯片TB6612FNG,以控制小车的两个电机,来使小车保持平衡状态。 整个系统制作完成后,小车可以在无人干预的条件下实现自主平衡,并且在引入适量干扰的情况下小车能够自主调整并迅速恢复至稳定状态。通过蓝牙,还可以控制小车前进,后退,左右转。 关键词:两轮自平衡小车加速度计陀螺仪数据融合滤波 PID算法 Design of Control System of Two-Wheel Self-Balance Vehicle based on Microcontroller Abstract Two-wheel self-balance vehicle is a kind of highly unstable two-wheel robot. The characteristic of two-wheel vehicle is the nature of the instability as traditional inverted pendulum, and effective control must be exerted if we need to make it stable. This paper presents a design scheme of two-wheel self-balance vehicle. We need using gravity accelerometer
双轮直立自平衡机器人Sway研究报告 本设计采用两块Cygnal公司推出的C8051F005单片机分别作为“双轮直立自平衡机器人”(以下命名为Sway)和人机交互上位机的控制核心。车体倾斜角度检测采用AD公司推出的双轴加速度传感器ADXL202及反射式红外线距离传感器。利用PWM技术动态控制两台直流电机的转速。上位机与机器人间的数据通信采用迅通生产的PTR2000超小型超低功耗高速无线收发数传MODEM。人机交互界面采用240*128图形液晶点阵、方向摇杆及按键。基于这些完备而可靠的硬件设计,使用了一套独特的软件算法,实现了Sway的平衡控制与 数据交换。 “双轮直立自平衡机器人Sway研究报告 作者:哈尔滨工程大学尹亮 摘要 本设计采用两块Cygnal公司推出的C8051F005单片机分别作为“双轮直立自平衡机器人”(以下命名为Sway)和人机交互上位机的控制核心。车体倾斜角度检
测采用AD公司推出的双轴加速度传感器ADXL202及反射式红外线距离传感器。利用PWM技术动态控制两台直流电机的转速。上位机与机器人间的数据通信采用迅通生产的PTR2000超小型超低功耗高速无线收发数传MODEM。人机交互界面采用240*128图形液晶点阵、方向摇杆及按键。基于这些完备而可靠的硬件设计,使用了一套独特的软件算法,实现了Sway的平衡控制与数据交换。 本设计的主要特色: 1.高速(25MIPS)低功耗的SOC单片机为各种复杂 算法的实现提供了保障,丰富的片内外设为高速数据采集及PWM调制信号的生成提供了方便,片内温度传感器方便对温度的采集。片内JTAG功能为程序的调试及对系统的现场编程提供了方便。 2.高效的H型PWM电路提高了电源的利用率,实现了 电机的平滑变速。 3.双轴加速度传感器及光电传感器的使用提高了车体 倾斜角度检测的精度,差分算法的应用提高了系统的抗干扰能力。 4.优化的软件算法,智能化的自动控制使车体运动准确 平稳。 5.高速的无线数据传输给各种远程数据采集和智能控 制提供了保障。
喷涂机器人控制系统初步方案 一、控制系统组成框图 本控制系统采用了以PC104为核心,以步进电机驱动网为低层控制通道的开放式控制器。下图是整个控制系统的组成框图。
二、PC104模块选型 采用PC104是因为它有如下特点:结构小巧紧凑, 仅96 mm ×90 mm面积内集成了PC 机所有功能;采用自栈接的母线结构,级联牢固,易于扩充;整机功耗低;兼容性好,可以借鉴PC机成熟技术;外设丰富,应用简单。 本控制系统PC104模块选用研华PCM-3343F。其组成如下:核心模块DM&P V ortex86DX 的高性能低功耗CPU 模块,CPU 速度1.0 GHz,带有浮点运算单元,在板集成了256MB DDR2 SDRAM(最大可支持512MB)、显示控制器(支持LCD显示,最高分辨率为1024×768),以太网控制器等。带有PA TA硬盘接口1个,PC104扩展插槽1个,KB/MS插槽1个,USB2.0接口4个,16位GPIO口,RS-232接口3个,RS-232/422/485接口1个。 选择该嵌入式主板时,应注意: 1)购买时,要求将系统内存升级到512MB; 2)购买时,要求配齐以下配件: ①键盘及鼠标的接口线共2根(编号及图片如下); p/n: 1703060053p/n: 1700060202 ②VGA接口线1根(编号及图片如下); p/n: 1700000898
③US B×2接口线1根(编号及图片如下); p/n: 1703100260 ④RS-232×2接口线1根(编号及图片如下); p/n: 1701200220 ⑤RS-422/485接口线1根(编号及图片如下);p/n: 1703040157 ⑥IDE接口线1根(编号及图片如下); p/n: 1701440350 ⑦外接Li电池1个(编号及图片如下); p/n: 1750129010
两轮自平衡小车毕业设计毕业论文 目录 1.绪论 (1) 1.1研究背景与意义 (1) 1.2两轮自平衡车的关键技术 (2) 1.2.1系统设计 (2) 1.2.2数学建模 (2) 1.2.3姿态检测系统 (2) 1.2.4控制算法 (3) 1.3本文主要研究目标与容 (3) 1.4论文章节安排 (3) 2.系统原理分析 (5) 2.1控制系统要求分析 (5) 2.2平衡控制原理分析 (5) 2.3自平衡小车数学模型 (6) 2.3.1两轮自平衡小车受力分析 (6) 2.3.2自平衡小车运动微分方程 (9) 2.4 PID控制器设计 (10) 2.4.1 PID控制器原理 (10) 2.4.2 PID控制器设计 (11) 2.5姿态检测系统 (12) 2.5.1陀螺仪 (12) 2.5.2加速度计 (13) 2.5.3基于卡尔曼滤波的数据融合 (14) 2.6本章小结 (16) 3.系统硬件电路设计 (17) 3.1 MC9SXS128单片机介绍 (17) 3.2单片机最小系统设计 (19)
3.3 电源管理模块设计 (21) 3.4倾角传感器信号调理电路 (22) 3.4.1加速度计电路设计 (22) 3.4.2陀螺仪放大电路设计 (22) 3.5电机驱动电路设计 (23) 3.5.1驱动芯片介绍 (24) 3.5.2 驱动电路设计 (24) 3.6速度检测模块设计 (25) 3.6.1编码器介绍 (25) 3.6.2 编码器电路设计 (26) 3.7辅助调试电路 (27) 3.8本章小结 (27) 4.系统软件设计 (28) 4.1软件系统总体结构 (28) 4.2单片机初始化软件设计 (28) 4.2.1锁相环初始化 (28) 4.2.2模数转换模块(ATD)初始化 (29) 4.2.3串行通信模块(SCI)初始化设置 (30) 4.2.4测速模块初始化 (31) 4.2.5 PWM模块初始化 (32) 4.3姿态检测系统软件设计 (32) 4.3.1陀螺仪与加速度计输出值转换 (32) 4.3.2卡尔曼滤波器的软件实现 (34) 4.4平衡PID控制软件实现 (35) 4.5两轮自平衡车的运动控制 (37) 4.6本章小结 (39) 5. 系统调试 (40) 5.1系统调试工具 (40) 5.2系统硬件电路调试 (40) 5.3姿态检测系统调试 (41)
一、前言 1.课题研究的意义,国内外研究现状和发展趋势 1.1课题研究的意义 随着机器人在工业装配线的应用越来越广泛,工业环境对其控制系统的要求也越来越高,所以开放式机器人控制系统的设计具有工程实际意义。 课题以一四自由度关节型机器人研制为背景,设计机器人运动控制系统的硬件电路和软件结构,对机器人的运动控制电路进行设计,实现机器人按照预定轨迹或自主运动控制功能。 在机械工业中,应用机械手的意义可以概括如下: ①以提高生产过程中的自动化程度 应用机械手有利于实现材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。 ②以改善劳动条件,避免人身事故 在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其他毒性污染以及工作空间狭窄的场合中,用人手直接操作是有危险或根本不可能的,而应用机械手即可部分或全部代替人安全的完成作业,使劳动条件得以改善。 ③可以减轻人力,并便于有节奏的生产 应用机械手代替人进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续的工作,这是减少人力的另一个侧面。因此,在自动化机床的综合加工自动线上,目前几乎都没有机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产 随着机器人技术的发展,机器人应用领域的不断扩大,对机器人的性能提出了更高的要求,因此,如何有效地将其他领域(如图像处理、声音识别、最优控制、人工智能等)的研究成果应用到机器人控制系统的实时操作中,是一项富有挑战性的研究工作。而具有开放式结构的模块化、标准化机器人,其控制系统的研究无疑对提高机器人性能和自主能力,推动机器人技术的发展具有重大意义。 1.2国内外研究现状和发展趋势 随着机器人控制技术的发展,针对结构封闭的机器人控制器的缺陷,开发“具有开放式结构的模块化、标准化机器人控制器”是当前机器人控制器的一个发展方向。近几年,日本、美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构、网络功能的机器人控制器。我国863计划智能机器人主题也已对这方面的研究立项。 由于适用于机器人控制的软、硬件种类繁多和现代技术的飞速发展,开发一个结构完全开放的标准化机器人控制器存在一定困难,但应用现有技术,如工业PC
2012年省电子竞赛设计报告 项目名称:自平衡小车 姓名:连文金、林冰财、陈立镔 指导老师:吴进营、苏伟达、李汪彪、何志杰日期:2012年9月7日
摘要: 本组的智能小车底座采用的是网上淘宝的三轮两个电机驱动的底座,主控芯片为STC89C52,由黑白循迹采集模块对车道信息进行采集,将采集的信息传送到主控芯片,再由主控芯片发送相应的指令到电机驱动模块L298N,从而控制电机的运转模式。 关键词: STC89C52 L298N 色标传感器 E18-F10NK 自动循迹 引言: 近现代,随着电子科技的迅猛发展,人们对技术也提出了更高的要求。汽车的智能化在提高汽车的行驶安全性,操作性等方面都有巨大的优势,在一些特殊的场合下也能满足一些特殊的需要。智能小车系统涉及到自动控制,车辆工程,计算机等多个领域,是未来汽车智能化是一个不可避免的大趋势。本文设计的小车以STC89C52为控制核心,用色标传感器 E18-F10NK作为检测元件实现小车的自动循迹前行。 一、系统设计 本组智能小车的硬件主要有以STC89C52 作为核心的主控器部分、自动循迹部分、电机驱动部分。 1.1方案论证及选择: 根据设计要求,可以有多种方法来实现小车的功能。我们采用模块化思想,从各个单元电路选择入手进行整体方案的论证、比较与选择。 本方案以STC89C52作为主控芯片,通过按键进行模式的选择切换,按键一选择三轮循迹,按键二进行两轮循迹。 1.1.1模式一(三轮循迹): 模式一(按键一控制):三轮循迹的时候,通过色标传感器和激光传感器进行实时的数据采集,反馈给主控芯片,主控芯片通过驱动L298来控制两路直流减速电机,从而保证路线的准确性。
中北大学 课程设计说明书 学生姓名: *杰学号:* 学院: 仪器与电子学院 专业: * 题目: 基于ARM的两轮自平衡车模型系统设计 指导教师:李锦明职称: 副教授 2015 年1 月30 日
摘要 近年来,两轮自平衡车的研究与应用获得了迅猛发展。本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪L3G4200以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。系统选用飞思卡尔32位单片机Kinetis K60为控制核心,通过滤波算法实现车身控制,人机交互等。 整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。 关键词:两轮自平衡陀螺仪姿态检测卡尔曼滤波数据融合
目录 1 课程设计目的 (1) 2 设计内容和要求 (1) 2.1 设计要求 (1) 2.2 研究意义 (1) 2.3 研究内容 (2) 3 设计方案及实现情况 (2) 3.1 两轮平衡车的平衡原理 (2) 3.2 系统方案设计 (3) 3.3 系统最终方案 (6) 3.4 系统软件设计 (9) 3.5 电路调试 (16) 4 课程设计总结 (18) 参考文献 (19) 附录 (20) 致谢 (21)
1 课程设计目的 (1)掌握嵌入式系统的一般设计方法和设计流程; (2)学习嵌入式系统设计,掌握相关IDE开发环境的使用方法; (3)掌握ARM的应用; (4)学习掌握嵌入式系设计的全过程; 2 设计内容和要求 2.1 设计要求 (1)学习掌握基于ARM Cortex-M4内核的Kinetis K60系列单片机的工作原理及应用;(2)学习掌握加速度计、陀螺仪的工作原理及应用; (3)设计基于PID控制的两轮自平衡车模型系统的工作原理图及PCB版图; 2.2 研究意义 近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科 学研究最活跃的领域之一,移动机器人的应用范围越来越广泛,面临的环境和任务也 越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。比如,户外 移动机器人需要在凹凸不平的地面上行走,有时环境中能够允许机器人运行的地方比 较狭窄等。如何解决机器人在这些环境中运行的问题,逐渐成为研究者关心的问题[1]。 两轮自平衡机器人的概念正是在这样一个背景下提出来的,这种机器人区别于其 他移动机器人的最显著的特点是:采用了两轮共轴、各自独立驱动的工作方式(这种驱 动方式又被称为差分式驱动方式),车身的重心位于车轮轴的上方,通过轮子的前后移 动来保持车身的平衡,并且还能够在直立平衡的情况下行驶。由于特殊的结构,其适 应地形变化能力强,运动灵活,可以胜任一些复杂环境里的工作。 两轮自平衡机器人自面世以来,一直受到世界各国机器人爱好者和研究者的关 注,这不仅是因为两轮自平衡机器人具有独特的外形和结构,更重要的是因为其自身 的本质不稳定性和非线性使它成为很好的验证控制理论和控制方法的平台,具有很高 的研究价值。
一、摘要 2 二、课程设计任务 3 1.问题描述 3 2.设计要求 3 三、课程设计内容 4 1、系统的模型表示 4 2、利用Matlab进行仿真设计 4 3、利用Simulink进行仿真设计 9 总结与体会 10 参考文献 10
本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
一、课程设计任务 1. 问题描述 如下图所示的汽车运动控制系统,设该系统中汽车车轮的转动惯量可以忽略不计,并且假定汽车受到的摩擦阻力大小与汽车的运动速度成正比,摩擦阻力的方向与汽车运动的方向相反,这样,该汽车运动控制系统可简化为一个简单的质量阻尼系统。 根据牛顿运动定律,质量阻尼系统的动态数学模型可表示为: ???==+v y u bv v m 系统的参数设定为:汽车质量m =1000kg , 比例系数b =50 N ·s/m , 汽车的驱动力u =500 N 。 根据控制系统的设计要求,当汽车的驱动力为500N 时,汽车将在5秒内达到10m/s 的最大速度。由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。这样,该汽车运动控制系统的性能指标可以设定为: 上升时间:t r <5s ; 最大超调量:σ%<10%; 稳态误差:e ssp <2%。 2.设计要求 1.写出控制系统的数学模型。 2.求系统的开环阶跃响应。 3.PID 控制器的设计 (1)比例(P )控制器的设计 (2)比例积分(PI )控制器的设计 (3)比例积分微分(PID )控制器的设计 利用Simulink 进行仿真设计。 二、课程设计内容 1.系统的模型表示
创新设计实训 设计题目:两轮双光感自平衡机器人完成日期:年 5 月 学院:机械工程学院 专业:机械工程及自动化指导老师: 小组成员:
天津理工大学机械工程学院 课程成绩评价表 学号姓名年级专业工作分工成绩 程序编写 论文撰写 程序编写 论文撰写 模型搭建 造型设计 模型搭建 造型设计 性能(70%)美观与创意(30%)整体 评价
评语:
一、问题的提出和分析 1.1 实验目标 两轮双光感自平衡机器人主要实验的目标: 能够依靠两个轮前后摆动来达到控制车体平衡的效果。 1.2 功能分析 两轮双光感自平衡机器人必须具备一些主要的功能: 小车必须在没有外部支撑点的情况下,通过两个光传感器所接收到的信息来控制小车保持平衡并且能够稳定的向前走。 二、模型的搭建 我们在初步分析了上述需要实现的功能后,开始了我们方案的选择和模型的搭建。首先,我们为了让马达的变速效果最直接的传递到轮上,所以采用直接将车轮安装在马达上的做法,然后为了实现车身中心不至于过高且过低,所以直接将两个马达横置,然后将控制器放置于其上,最后用各种大小不同的零件将这两个部件固定并合成一个两轮小车 搭建结果如图所示。
三、程序的实现 该小车的程序是通过乐高的一个名为Bricx Command Center的软件编辑的,因为该软件给马达提供了七级变速,所以便于调试马达的速度来打到控制的效果。外加该软件还有一个好处就是采用了高级语言,让编程者能够直观的看出所要执行的任务。 3.1 程序流程图 该程序是通过对小车两个轮的控制,以让小车通过自动调节重心的方法来保持平衡,通过前后两个光传感器接受外界光的读数的变化,判断现在小车车身的倾斜程度,然后以适当的功率带动车辆向倾斜方向运动适当距离使重心回复到正确位置。
机器人分布式控制系统设计与实现 1引言 目前,机器人系统的特点是开放式机器人控制,强调结构化、模块化、 可扩展性、交互性,是对机器人设计结构单一、信息封闭、缺少交互性缺点的突破。分层分布式控制系统采用集中管理,分散控制方式,这种控制方法优点体 现在:集中监控和管理,管理和现场分离,管理更加综合化和系统化;实现分 散控制可使各功能模块的设计、装配、调试以及维护相互独立,系统控制的危 险性分散,可靠性提高,投资减小;采用网络通信技术,可根据需要增加以微 处理器为核心的功能模块,具有良好的系统开放性、扩展性和升级特性。 本论文详细介绍了一种分层分布式控制系统的设计方案,系统由上到下分 为主控中心决策层、车载PC运算层、下位机驱动子层以及位置反馈子层。主 控中心决策层是系统的主层,可以是台式机或笔记本电脑,基于VC++编译环 境设计的人机交互界面,满足友好、便于操作的要求,主控中心决策层的功能 是总体规划和分配任务,对机器人进行远程监控;车载PC运算层为一台笔记 本电脑,基于VC++编译环境设计了控制界面,通过无线网卡与主控中心决策 层进行数据传输,采用面向连接可靠的TCP传输控制协议,保证数据传输的可 靠性;下位机驱动子层和位置反馈子层是相互独立的功能模块,与车载PC运 算层之间通过串口进行通信;下位机驱动子层是一个完整的直流电 机闭环控制系统,包括CPU、控制芯片、驱动芯片以及增量式光电编码器;位置反馈子层通过CPU的I/O口和中断得到机器人车轮轴转角信息,结合机器 人机械系统的实际尺寸计算机器人中心的实际位置信息,处理好的位置信息通 过串口反馈给车载PC运算层。该控制系统应用在国家自然科学基金资助项目 和国家重点基础研究发展计划973项目的移动机器人平台上,运动控制测试结 果表明,分层分布式控制方式控制精度高,稳定性好,系统响应迅速;同时该 控制系统具有超强的计算能力和二次开发潜力,根据项目研究需要可在各个子 层进行分布式扩展,比如在下位机驱动子层和位置反馈子层的同级层中扩展传 感器功能子层,增加机器人的智能。该控制系统为项目的实验工作奠定基础。 2分层分布式控制系统设计 1. 基于VC++的主控中心决策层设计 主控中心决策层的作用是总体规划和分配任务,对机器人进行远程监控。 基于VC++编译环境,采用模块化方法对人机交互系统进行设计,分为网络数 据传输模块、运动参数输入模块、轨迹显示模块、视觉监控模块。如图
1绪论 1.1选题背景与意义 汽车已经成为人们日常生活不可缺少的代步交通工具,在汽车发达国家,旅客运输的60%以上,货物运输的50%以上由汽车来完成,汽车工业水平和家庭平均拥有汽车数量已经成为衡量一个国家工业发达程度的标志。进行汽车运动性能研究时.一般从操纵性、稳定性和乘坐舒适性等待性着手。但近年来.随着交通系统的日趋复杂,考虑了道路环境在内的汽车运动性能开始受到关注。因此,汽车运动控制系统的研究也显得尤为重要,在文中,首先对汽车的运动原理进行分析,建立控制系统简化模型,确定期望的静态指针(稳态误差)和动态指针(超调量和上升时间)。然后对汽车运动控制系统进行设计分析。从而确定系统的最佳静态和动态指针。 2 论文基本原理分析 2.1.1汽车运动横向控制 (1)绝对位置的获得方法 汽车横向方向的控制使用GPS(全球定位系统)的绝对位置信息。GPS信息的精度与采样周期、时间滞后等有关。为提高GPS的数据精度和平滑数据.采用卡尔曼滤波对采样数据进行修正。GPS的采样周期为200ms相对应控制的周期采用50ms。另外考虑通信等的滞后、也需要进行补偿,采用航位推测法(dead reckoning)解决此问题。通过卡尔曼滤波和航位推测法推算出的值作为汽车的绝对位置使用来控制车速、横摆角速度等车辆的状态量。GPS 的数据通过卡尔曼滤波减少偏差、通过航位推测法进行误差和迟滞补偿.提高了位置数据推算的精度。 (2)前轮转角变化量的算出方法 这里对前轮目标转角变化量(?δ)的算出方法作简要说明,横方向控制采用预见控制,可以从现在汽车的状态预测经过时间t p秒后的汽车位置,由t p秒后的预测位置和目标路径
燕山大学 课程设计说明书题目:双轮自平衡小车机器人系统设计与制作 学院(系):机械工程学院 年级专业:12级机械电子工程 组号:3 学生: 指导教师:史艳国建涛艳文史小华庆玲 唐艳华富娟晓飞正操胡浩波 日期: 2015.11
燕山大学课程设计(论文)任务书院(系):机械工程学院基层教学单位:机械电子工程系
摘要 两轮自平衡小车是一种非线性、多变量、强耦合、参数不确定的复杂系统,他体积小、结构简单、运动灵活,适合在狭小空间工作,是检验各种控制方法的一个理想装置,受到广大研究人员的重视,成为具有挑战性的课题之一。 两轮自平衡小车系统是一种两轮左右并行布置的系统。像传统的倒立一样,其工作原理是依靠倾角传感器所检测的位姿和状态变化率结合控制算法来维持自身平衡。本设计通过对倒立摆进行动力学建模,类比得到小车平衡的条件。从加速度计和陀螺仪传感器得出的角度。运用卡尔曼滤波优化,补偿陀螺仪的漂移误差和加速度计的动态误差,得到更优的倾角近似值。通过光电编码器分别得到车子的线速度和转向角速度,对速度进行PI控制。根据PID控制调节参数,实现两轮直立行走。通过调节左右两轮的差速实现小车的转向。 制作完成后,小车实现了在无线蓝牙通讯下前进、后退、和左右转向的基本动作。此外小车能在正常条件下达到自主平衡状态。并且在适量干扰下,小车能够自主调整并迅速恢复稳定状态。 关键词:自平衡陀螺仪控制调试
前言 移动机器人是机器人学的一个重要分支,对于移动机器人的研究,包括轮式、腿式、履带式以及水下式机器人等,可以追溯到20世纪60年代。移动机器人得到快速发展有两方面原因:一是其应用围越来越广泛;二是相关领域如计算、传感、控制及执行等技术的快速发展。移动机器人尚有不少技术问题有待解决,因此近几年对移动机器人的研究相当活跃。 近年来,随着移动机器人研究不断深入、应用领域更加广泛,所面临的环境和任务也越来越复杂。机器人经常会遇到一些比较狭窄,而且有很多大转角的工作场合,如何在这样比较复杂的环境中灵活快捷的执行任务,成为人们颇为关心的一个问题。双轮自平衡机器人概念就是在这样的背景下提出来的。两轮自平衡小车是一个高度不稳定两轮机器人,是一种多变量、非线性、强耦合的系统,是检验各种控制方法的典型装置。同时由于它具有体积小、运动灵活、零转弯半径等特点,将会在军用和民用领域有着广泛的应用前景。因为它既有理论研究意义又有实用价值,所以两轮自平衡小车的研究在最近十年引起了大量机器人技术实验室的广泛关注。 本论文主要叙述了基于stm32控制的两轮自平衡小车的设计与实现的整个过程。主要容为两轮自平衡小车的平衡原理,直立控制,速度控制,转向控制及系统定位算法的设计。通过此设计使小车具备一定的自平衡能力、负载承载能力、速度调节能力和无线通讯功能。小车能够自动检测自身机械系统的倾角并完成姿态的调整,并在加载一定重量的重物时能够快速做出调整并保证自身系统的自我平衡。能够以不同运动速度实现双轮车系统的前进、后退、左转与右转等动作,同时也能够实现双轮自平衡车系统的无线远程控制操作
双轮自平衡车设计报告 学院………….......... 班级…………………… 姓名………………..手机号…………………..姓名………………..手机号…………………..姓名………………..手机号…………………..
目录 一、双轮自平衡车原理 二、总体方案 三、电路和程序设计 四、算法分析及参数确定过程
一.双轮自平衡车原理 1.控制小车平衡的直观经验来自于人们日常生活经验。一般的人通过简单练习就可以让一个直木棒在手 指尖上保持直立。这需要两个条件:一个是托着木棒的手掌可以移动;另一个是眼睛可以观察到木棒的倾斜角度和倾斜趋势(角速度)。通过手掌移动抵消木棒的倾斜角度和趋势,从而保持木棒的直立。这两个条 件缺一不可,让木棒保持平衡的过程实际上就是控制中的负反馈控制。 图1 木棒控制原理图 2.小车的平衡和上面保持木棒平衡相比,要简单一些。因为小车是在一维上面保持平衡的,理想状态下,小车只需沿着轮胎方向前后移动保持平衡即可。 图2 平衡小车的三种状态 3.根据图2所示的平衡小车的三种状态,我们把小车偏离平衡位置的角度作为偏差;我们的目标是通过 负反馈控制,让这个偏差接近于零。用比较通俗的话描述就是:小车往前倾时车轮要往前运动,小车往后倾时车轮要往后运动,让小车保持平衡。 4.下面我们分析一下单摆模型,如图4所示。在重力作用下,单摆受到和角度成正比,运动方向相反的回复力。而且在空气中运动的单摆,由于受到空气的阻尼力,单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运动速度成正比,方向相反。 图4 单摆及其运动曲线
类比到我们的平衡小车,为了让小车能静止在平衡位置附近,我们不仅需要在电机上施加和倾角成正比的回复力,还需要增加和角速度成正比的阻尼力,阻尼力与运动方向相反。 5 平衡小车直立控制原理图 5.根据上面的分析,我们还可以总结得到一些调试的技巧:比例控制是引入了回复力;微分控制是引入了阻尼力,微分系数与转动惯量有关。 在小车质量一定的情况下,重心位置增高,因为需要的回复力减小,所以比例控制系数下降;转动惯量变大,所以微分控制系数增大。在小车重心位置一定的情况下,质量增大,因为需要的回复力增大,比例控制系数增大;转动惯量变大,所以微分控制系数增大。 二.总体方案 ■小车总框图
第一章概述 1完成本次循环工作后,停止在最初位置。其运动路线示意图如下图1-1所示。 如图1-1 小车运动路线示意图 第二章硬件设计 2.1 主电路图 如图2-1为小车循环控制的主电路原理图。该电路图利用两个接触器的主触点KM1、KM2分别接至电机的三相电源进线中,其中相对电源的任意两相对调,即可实现电机的正反转,也可达到小车左右运行的目的。假设接通KM1为正转(小车右行),则接通KM2为反转(小车左行)。
图2-1小车循环控制的主电路原理 2.2 I/O地址分配 如表2-1为小车循环运动PLC控制的I/O分配表。在运行过程中,这些I/O口分别起到了控制各阶段的输入和输出的作用,并且也使小车的控制过程更清晰明了,动作与结果显示更加方便直接。 表2-1
2.3 I/O接线图 如图2-2为小车循环运动PLC控制的I/O接线图。在进行调试过程时,在PLC模块上,当I0.0有输入信号,即按下SQ1;当I0.1有输入信号,也即按下SQ2,以此类推,I/O接线图就是把实际的开关信号变成调试时的输入信号。同理,输出信号也是利用PLC模块把小车的实际运动用Q0.0、Q0.1的状态表现出来。 图2-2小车循环运动PLC控制的I/O接线图 2.4 元件列表 如表2-2为小车循环运动PLC控制的元件列表。在本次设计中就是利用这些元件,用若干导线连接起来组成了我们需要的原理图、I/O接线图。 表2-2
第三章软件设计 3.1 程序流程图 如图3-1为小车循环运动PLC控制的程序流程图。小车在一个周期内的运动由4段组成。设小车最初在左端,当按下启动按钮,则小车自动循环地工作,若按下停止按钮,则小车完成本次循环工作后,停止在最初位置。 首先小车位于初始位置,按下SB1启动后,小车向右行驶;当碰到行程开关SQ4,小车转向,向左行驶;碰到行程开关SQ2,小车再一次转向,向右行驶;碰到行程开关SQ3,小车又向左行驶,直到再次碰到SQ1,然后开始依次循环以上过程。若不按下停止按钮SB2则小车一直进行循环运动,若此时按下停止按钮SB2,小车又碰到行程开关SQ1,则小车回到初始位置。
1前言 1.1 焊接机器人的发展历史与现状 现代机器人的研究始于20世纪中期,其技术背景是计算机和自动化的发展,以及原子能的开发利用。美国原子能委员会下属的阿尔贡研究所为解决可代替人进行放射性物质的处理问题,在1947年研制了遥控式机械手臂;1948年又相继开发了电气驱动式的主从机械手臂,从而解决了对放射性物质的进行远距离操作的问题。1954年,美国科学家戴沃尔最先提出工业机器人的概念,并申请了新的专利。其主要特点是借助伺服技术来控制机器人的关节,并利用人手对机械手臂进行动作示教,机械手臂能实现人物动作的记录和再现。这就是示教再现机械臂,现在所用的机械手臂差不多都采用这种控制方式。伴随着现代社会的发展,为了提高生产效率,稳定和提高产品的质量,加快实现工业生产机械化,改善工人劳动条件,已经大大改进了机械手臂的性能,并大量应用于实际生产中,尤其是在高压、高温、多粉尘、高噪音和重度污染的场合。焊接机器人的诞生可以追溯到上世纪70年代,是由日本发那科(FANUC)公司生产的小型机器人改进的,受限于当时的技术手段以及高昂的造价,使得当时的焊接机器人不能得到很好的应用。机械手臂是一种工业机器人,它由控制器、操作机、检测传感装置和伺服驱动系统组成,是一种可以自动控制、仿人手操作、可以重复编程、可以在三维空间进行各种动作的自动化生产设备。机械手臂首先是在汽车制造工业中使用的,它一般可进行焊接、上下料、喷漆以及搬运。它可代替人们进行从事繁重、单调的重复劳动作业,并且能够大大改善劳动生产率,提高产品的质量[1]。 到了90年代初,随着计算机技术、微电子技术、网络技术等的快速发展,机器人技术也得到了飞速发展。工业机器人的制造水平、控制速度和控制精度、可靠性等不断提高,而机器人的制造成本和价格却不断下降。在西方国家,由于劳动力成本的提高为企业带来了不小的压力,而机器人价格指数的降低又恰巧为其进一步推广应用带来了契机,采用机器人的利润显然要比采用人工所带来的利大,使得焊机机器人得到了推广,同时技术的进步也使得焊机机器人技术得到很大提高。 进入新世纪之后,由于各国对焊接机器人的不断重视,使得焊接机器人技术取得了很大的进步。同时由于其焊机精度及更低的生产成本,也使得它得到了越来越多的应用。目前,焊接机器人主要用于装卸、搬运、焊接、铸锻以及热处理等方面,无论数量、品种和性能方面都还不能满足工业生产发展需要。在一些特殊的行业,使用它来代替人工操作的,主要是在危险作业、多粉尘、高温、噪声、工作空间小等的不适于人工作业的环境。 1.2 焊接机器人发展趋势
2015年陇东学院第十六届“挑战杯” 课外学术科技作品竞赛 双轮自平衡小车的设计与制作 学院:电气工程学院 班级:12级自动化本科班 姓名:周永 2015年12月8日
双轮自平衡小车的设计与制作 摘要:双轮自平衡小车是一个集动态决策和规划、环境感知、行为控制和执行等多种功能于一体的综合复杂系统,其关键是在解决自平衡的同时,还能够适应在各种环境下的控制任务。通过运用外加速度传感器、角速度传感器等,可以实现小车的平衡自主前进。双轮自平衡小车,涉及到传感器的驱动,数据的处理,角度的计算,电机的控制等,内容比较丰富,可作为实践自动控制原理及单片机技术的一个不错选择,是自我锻炼的绝好选题,对于以后制作此方面的民用产品也有很大的启迪作用。 关键词:双轮;自平衡;控制;传感器 1.引言 目前市场上的各种电子产品及家电机器人等行业越来越多地用到了智能控制技术。可以说,当今社会是一个智能型社会。各方各面都在竭尽全力向着智能方向发展,不论是人工智能还是联网智能,都在突出一个智能。智能已经覆盖了我们生活的方方面面,我们正在被智能的概念所潜移默化。不论是智能手机、玩具还是机器人,都已经成了我们生活的一部分。正是在这种情况下,智能交通的发展也发生了翻天覆地的变化,从飞车到自动驾驶汽车,无不在向我们说明,现代人已经对智能型交通工具期待已久了。作为最新科技产品的一个代表,最近市场上新出现的独轮车越来越受到了消费者的青睐。可以想象,最近几年内此类产品将会在市场上争得一席之地。比起独轮车,两轮车具有同样的购买热度,但是设计难度却没那么高,所以我将选择了从双轮车开始玩起智能交通工具。 2设计方案 方案一:用51单片机作为主控制器,用MPU6050模块采集姿态数据,用光电编码器对5V直流电机进行编码,显示模块采用LCD12864液晶屏,电源采用三端稳压方案,用红外遥控控制小车行走。本设计简单廉价,然而由于主控的反应相对缓慢,很难满足设计要求。 方案二:采用STM32单片机作主控制器,仍然用MPU6050模块作姿态数据采集,而电机采用二手的型号为16G214E MR19的具有高精度霍尔编码器的原价2000+的瑞士进口12V直流电机,显示模块采用了更轻薄更清晰更小巧的