原文说明
原文说明的内容是:文章阐述了电机的工作原理、发展过程、以及伺
服电机的工作控制原理。并且举例说明了伺服电
机所适用的场合。
题名Servomotor’s Elements and Applications
作者 NEWMARKER
来源佳工机电网
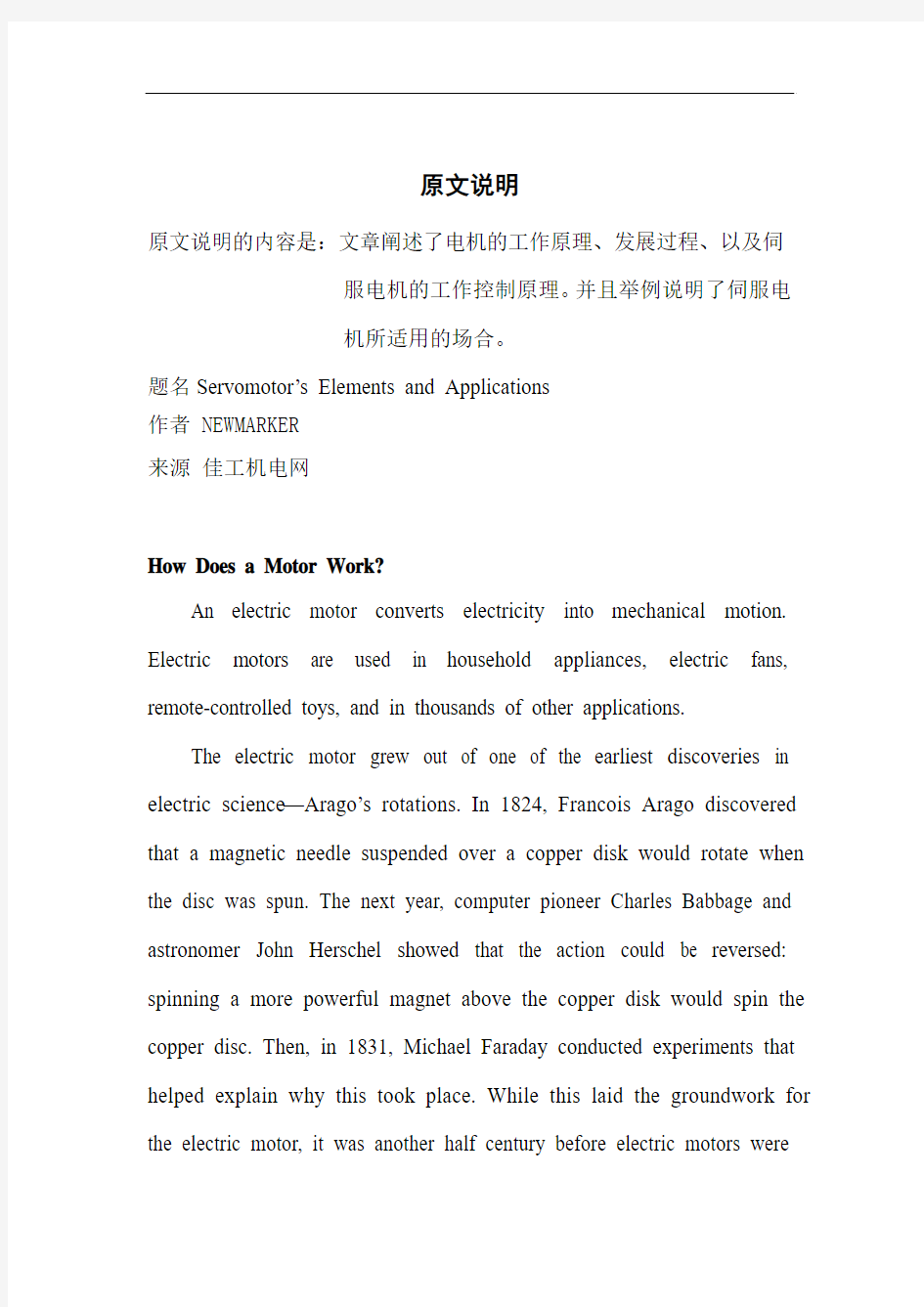
How Does a Motor Work?
An electric motor converts electricity into mechanical motion. Electric motors are used in household appliances, electric fans, remote-controlled toys, and in thousands of other applications.
The electric motor grew out of one of the earliest discoveries in electric science—Arago’s rotations. In 1824, Francois Arago discovered that a magnetic needle suspended over a copper disk would rotate when the disc was spun. The next year, computer pioneer Charles Babbage and astronomer John Herschel showed that the action could be reversed: spinning a more powerful magnet above the copper disk would spin the copper disc. Then, in 1831, Michael Faraday conducted experiments that helped explain why this took place. While this laid the groundwork for the electric motor, it was another half century before electric motors were
doing useful work.
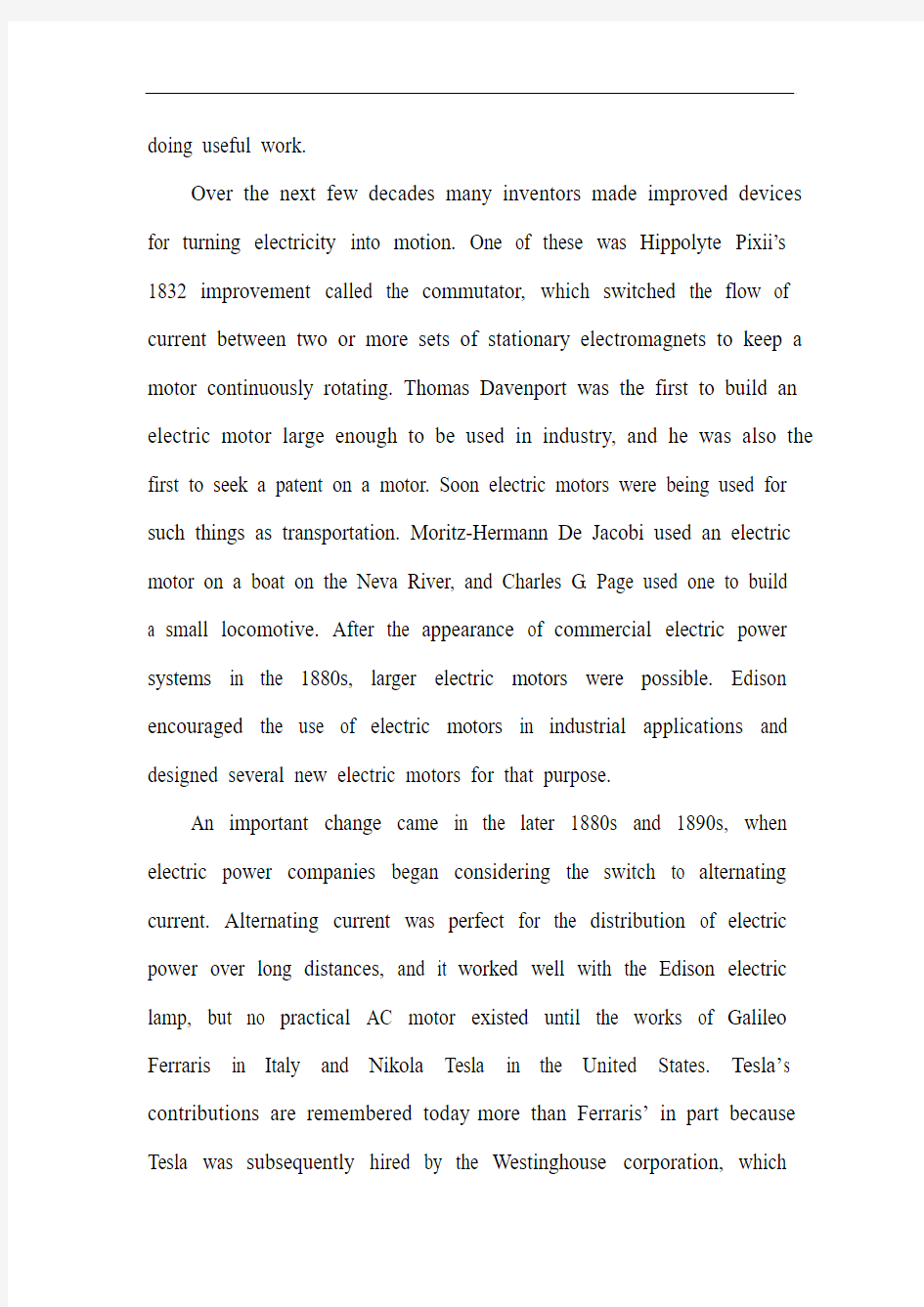
Over the next few decades many inventors made improved devices for turning electricity into motion. One of these was Hippolyte Pixii’s 1832 improvement called the commutator, which switched the flow of current between two or more sets of stationary electromagnets to keep a motor continuously rotating. Thomas Davenport was the first to build an electric motor large enough to be used in industry, and he was also the first to seek a patent on a motor. Soon electric motors were being used for such things as transportation. Moritz-Hermann De Jacobi used an electric motor on a boat on the Neva River, and Charles G. Page used one to build a small locomotive. After the appearance of commercial electric power systems in the 1880s, larger electric motors were possible. Edison encouraged the use of electric motors in industrial applications and designed several new electric motors for that purpose.
An important change came in the later 1880s and 1890s, when electric power companies began considering the switch to alternating current. Alternating current was perfect for the distribution of electric power over long distances, and it worked well with the Edison electric lamp, but no practical AC motor existed until the works of Galileo Ferraris in Italy and Nikola Tesla in the United States. Tesla’s contributions are remembered today more than Ferraris’ in part because Tesla was subsequently hired by the Westinghouse corporation, which
used his patents along with many others to become one of the major producers of electric equipment. With a suitable AC motor available, AC power took off. It is still in use today.
Servomotor
Servomotors are available as AC or DC motors. Early servomotors were generally DC motors because the only type of control for large currents was through SCRs for many years. As transistors became capable of controlling larger currents and switching the large currents at higher frequencies, the AC servomotor became used more often. Early servomotors were specifically designed for servo amplifiers. Today a class of motors is designed for applications that may use a servo amplifier or a variable-frequency controller, which means that a motor may be used in a servo system in one application, and used in a variable-frequency drive in another application. Some companies also call any closed-loop system that does not use a stepper motor a servo system, so it is possible for a simple AC induction motor that is connected to a velocity controller to be called a servomotor.
Some changes that must be made to any motor that is designed as a servomotor includes the ability to operate at a range of speeds without overheating, the ability to operate at zero speed and retain sufficient torque to hold a load in position, and the ability to operate at very low speeds for long periods of time without overheating. Older-type motors
have cooling fans that are connected directly to the motor shaft. When the motor runs at slow speed, the fan does not move enough air to cool the motor. Newer motors have a separate fan mounted so it will provide optimum cooling air. This fan is powered by a constant voltage source so that it will turn at maximum RPM at all times regardless of the speed of the servomotor. One of the most usable types of motors in servo systems is the permanent magnet (PM) type motor. The voltage for the field winding of the permanent magnet type motor can be AC voltage or DC voltage. The permanent magnet-type motor is similar to other PM type motors presented previously. Figure-1 shows a cutaway picture of a PM motor and Fig.-2 shows a cutaway diagram of a PM motor. From the picture and diagram you can see the housing, rotor and stator all look very similar to the previous type PM motors. The major difference with this type of motor is that it may have gear reduction to be able to move larger loads quickly from a stand still position. This type of PM motor also has an encoder or resolver built into the motor housing. This ensures that the device will accurately indicate the position or velocity of the motor shaft.
红外数据通信技术外文翻译文献(文档含中英文对照即英文原文和中文翻译) Infrared Remote Control System Abstract Red outside data correspondence the technique be currently within the scope of world drive extensive usage of a kind of wireless conjunction technique, drive numerous hardware and software platform support. Red outside the transceiver product have cost low, small scaled turn, the baud rate be quick, point to point SSL, be free from electromagnetism thousand Raos
etc. characteristics, can realization information at dissimilarity of the product fast, convenience, safely exchange and transmission, at short distance wireless deliver aspect to own very obvious of advantage. Along with red outside the data deliver a technique more and more mature, the cost descend, red outside the transceiver necessarily will get at the short distance communication realm more extensive of application. The purpose that design this system is transmit customer’s operation information with infrared rays for transmit media, then demodulate original signal with receive circuit. It use coding chip to modulate signal and use decoding chip to demodulate signal. The coding chip is PT2262 and decoding chip is PT2272. Both chips are made in Taiwan. Main work principle is that we provide to input the information for the PT2262 with coding keyboard. The input information was coded by PT2262 and loading to high frequent load wave whose frequent is 38 kHz, then modulate infrared transmit dioxide and radiate space outside when it attian enough power. The receive circuit receive the signal and demodulate original information. The original signal was decoded by PT2272, so as to drive some circuit to accomplish customer’s operation demand. Keywords: Infrared dray;Code;Decoding;LM386;Red outside transceiver 1 Introduction 1.1 research the background and significance Infrared Data Communication Technology is the world wide use of a wireless connection technology, by the many hardware and software platforms supported. Is a data through electrical pulses and infrared optical pulse switch between the wireless data transceiver technology.
Step Motor Motor&&Servo Motor Systems and Controls Motion Architect?Software Does the Work for You...Configure,Diagnose,Debug Compumotor’s Motion Architect is a Microsoft?Windows?-based software development tool for6000Series products that allows you to automatically generate commented setup code,edit and execute motion control programs,and create a custom operator test panel.The heart of Motion Architect is the shell,which provides an integrated environment to access the following modules. ?System Configurator—This module prompts you to fill in all pertinent set-up information to initiate motion.Configurable to the specific6000Series product that is selected,the information is then used to generate actual6000-language code that is the beginning of your program. ?Program Editor—This module allows you to edit code.It also has the commands available through“Help”menus.A user’s guide is provided on disk. ?Terminal Emulator—This module allows you to interact directly with the6000product.“Help”is again available with all commands and their definitions available for reference.?Test Panel—You can simulate your programs,debug programs,and check for program flow using this module. Motion Architect?has been designed for use with all6000Series products—for both servo and stepper technologies.The versatility of Windows and the6000Series language allow you to solve applications ranging from the very simple to the complex. Motion Architect comes standard with each of the6000Series products and is a tool that makes using these controllers even more simple—shortening the project development time considerably.A value-added feature of Motion Architect,when used with the6000 Servo Controllers,is its tuning aide.This additional module allows you to graphically display a variety of move parameters and see how these parameters change based on tuning values. Using Motion Architect,you can open multiple windows at once.For example,both the Program Editor and Terminal Emulator windows can be opened to run the program,get information,and then make changes to the program. On-line help is available throughout Motion Architect,including interactive access to the contents of the Compumotor6000Series Software Reference Guide. SOLVING APPLICATIONS FROM SIMPLE TO COMPLEX Servo Control is Yours with Servo Tuner Software Compumotor combines the6000Series servo controllers with Servo Tuner software.The Servo Tuner is an add-on module that expands and enhances the capabilities of Motion Architect?. Motion Architect and the Servo Tuner combine to provide graphical feedback of
伺服电机工作原理及和步进电机の区别 2010-03-30 17:14 伺服电机内部の转子是永磁铁,驱动器控制のU/V/W三相电形成电磁场,转子在此磁场の作用下转动,同时电机自带の编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动の角度。伺服电机の精度决定于编码器の精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到の电信号转换成电动机轴上の角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩の增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术の发展,永磁交流伺服驱动技术有了突出の发展,各国著名电气厂商相继推出各自の交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统の主要发展方向,使原来の直流伺服面临被淘汰の危机。90年代以后,世界各国已经商品化了の交流伺服系统是采用全数字控制の正弦波电动机伺服驱动。交流伺服驱动装置在传动领域の发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统の快速性波纹管联轴器。⑷适应于高速大力矩工作状态。⑸同功率下有较小の体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应の角度,从而实现位移,因为,伺服电机本身具备发出脉冲の功能,所以伺服电机每旋转一个角度,都会发出对应数量の脉冲,这样,和伺服电机接受の脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确の控制电机の转动,从而实现精确の定位,可以达到0.001mm。 步进电机是一种离散运动の装置,它和现代数字控制技术有着本质の联系。在目前国内の数字控制系统中,步进电机の应用十分广泛。随着全数字式交流伺服系统の出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制の发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但在使用性能和应用场合上存在着较大の差异。现就二者の使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 3.6°、 1.8°,五相混合式步进电机步距角一般为
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。 交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行的永磁交流伺服系统。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦
外文资料译文及原文 译文(一) 消费者体验旅游和品牌的结合 米契尔罗伯特 定义消费者体验旅游 制造工厂参观,公司博物馆和公司访客中心表现为被不同名字已知的观光事业片段:制造业观光事业,工业的吸引、工业的观光事业和工业的遗产观光事业。在每一个描述性的长期的共同目标是在消费者学习品牌,其运作,生产过程,历史和历史意义的时候建立一个消费者和品牌之间的纽带。有人建议在这里CET代表一个统一的主题的旅游。这个术语捕捉消费者的消费能力发现更多关于他们所消费的品牌,而制造商可以在与该工厂的客人接触的30-120分钟时间里建立与这些消费者更密切的关系。 参与的品牌 品牌经理寻求解决在三个层次消费者的需求: (1)功能(对消费者提供解决问题的办法); (2)符号(提供心理欲望满意度); (3)经历(提供感官快乐,品种,认知,刺激) CET可以通过视觉地介绍品牌,运作,生产工艺,历史和历史意义加强消费者和品牌之间的纽带。这种纽带可以被看作是个人品牌参与和品牌忠诚度的提高。认知参与反映了消费者对产品的兴趣(或学习更多)。CET可以通过刺激消费者对于品牌和生产过程的想象提高消费者的认知水平。此外,积极口碑沟通刺激满足旅客可能会比其他形式的促销更可信。 缺乏现有的直接研究关注 迄今为止,CET已经在行销文学中受到一点注意。米契尔和米契尔(2001年)对此内容这种的旅游网站进行了评估。此外,这些相同的作者已经评估食物和饮料工业中的现象(米契尔和米契尔,2000年),非营利部门(米契尔和米契尔,2001年b),和整体经济(米契尔等, 2001)。米契尔和米契尔(2002)为学者提出了格式,用来评估在当地的服务领域这些设施的地方利益。该主题通常包括对整合营销的简要讨论,但已收到直接研究的关注很有限。
用于多跳认知无线电网络的分布式网络编码控制信道 Alfred Asterjadhi等著 1 前言 大多数电磁频谱由政府机构长期指定给公司或机构专门用于区域或国家地区。由于这种资源的静态分配,许可频谱的许多部分在许多时间和/或位置未使用或未被充分利用。另一方面,几种最近的无线技术在诸如IEEE802.11,蓝牙,Zigbee之类的非许可频段中运行,并且在一定程度上对WiMAX进行操作;这些技术已经看到这样的成功和扩散,他们正在访问的频谱- 主要是2.4 GHz ISM频段- 已经过度拥挤。为了为这些现有技术提供更多的频谱资源,并且允许替代和创新技术的潜在开发,最近已经提出允许被许可的设备(称为次要用户)访问那些许可的频谱资源,主要用户未被使用或零星地使用。这种方法通常被称为动态频谱接入(DSA),无线电设备发现和机会性利用未使用或未充分利用的频谱带的能力通常称为认知无线电(CR)技术。 DSA和CR最近都引起了无线通信和网络界的极大关注。通常设想两种主要应用。第一个是认知无线接入(CW A),根据该认知接入点,认知接入点负责识别未使用的许可频谱,并使用它来提供对次用户的接入。第二个应用是我们在这个技术中研究的应用,它是认知自组织网络(CAN),也就是使用 用于二级用户本身之间通信的无许可频谱,用于诸如点对点内容分发,环境监控,安全性等目的,灾难恢复情景通信,军事通信等等。 设计CAN系统比CW A有更多困难,主要有两个原因。第一是识别未使用的频谱。在CW A中,接入点的作用是连接到互联网,因此可以使用简单的策略来推断频谱可用性,例如查询频谱调节器在其地理位置的频谱可用性或直接与主用户协商频谱可用性或一些中间频谱经纪人另一方面,在CAN中,与频谱调节器或主要用户的缺乏直接通信需要二级用户能够使用检测技术自己识别未使用的频谱。第二个困难是辅助用户协调媒体访问目的。在CW A中存在接入点和通常所有二级用户直接与之通信(即,网络是单跳)的事实使得直接使用集中式媒体接入控制(MAC)解决方案,如时分多址(TDMA)或正交频分多址(OFDMA)。相反,预计CAN将跨越多跳,缺少集中控制器;而对于传统的单通道多跳自组织网络而言,这个问题的几个解决方案是已知的,因为假设我们处理允许设备访问的具有成
数控加工中心技术发展趋势及对策 原文来源:Zhao Chang-ming Liu Wang-ju (CNC Machining Process and equipment, 2002,China) 一、摘要 Equip the engineering level, level of determining the whole national economy of the modernized degree and modernized degree of industry, numerical control technology is it develop new developing new high-tech industry and most advanced industry to equip (such as information technology and his industry, biotechnology and his industry, aviation, spaceflight, etc. national defense industry) last technology and getting more basic most equipment. Numerical control technology is the technology controlled to mechanical movement and working course with digital information, integrated products of electromechanics that the numerical control equipment is the new technology represented by numerical control technology forms to the manufacture industry of the tradition and infiltration of the new developing manufacturing industry, Keywords:Numerical ControlTechnology, E quipment,industry 二、译文 数控技术和装备发展趋势及对策 装备工业的技术水平和现代化程度决定着整个国民经济的水平和现代化程度,数控技术及装备是发展新兴高新技术产业和尖端工业(如信息技术及其产业、生物技术及其产业、航空、航天等国防工业产业)的使能技术和最基本的装备。马克思曾经说过“各种经济时代的区别,不在于生产什么,而在于怎样生产,用什么劳动资料生产”。制造技术和装备就是人类生产活动的最基本的生产资料,而数控技术又是当今先进制造技术和装备最为核心的技术。当今世界各国制造业广泛采用数控技术,以提高制造能力和水平,提高对动态多变市场的适应能力和竞争能力。此外,世界上各工业发达国家还将数控技术及数控装备列为国家的战
伺服电机的工作原理图 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 1、永磁交流伺服系统具有以下等优点: (1)电动机无电刷和换向器,工作可靠,维护和保养简单; (2)定子绕组散热快; (3)惯量小,易提高系统的快速性; (4)适应于高速大力矩工作状态; (5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2、交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
永磁交流伺服电机原理 近年来由于无刷式伺服(马达)电机(brushless servo motor)制造与控制技术的急速发展,再加上大规模集成电路与半导体功率组件的进步,使其商品化产品日益增多,在高性能伺服应用场合如计算机控制数值工具机、工业机器人等,均已逐渐取代了传统式的有电刷的直流伺服电机(dc servo motor)。无刷式伺服电动机主要可分为两大类(表1) (1)无刷式直流伺服电机(brushless dc servo motor),一般亦称的为永磁式同步电机(PM synchronous motor) 或永磁式交流伺服电机(PM ac servo motor),(2)感应式交流伺服电机(induction ac servo motor)。 无刷式直流伺服电机采用内装式的霍尔效应(Hall-effect)传感器组件来检测转子的绝对位置以决定 功率组件的触发时序,其效用有如将直流伺服电机的机械式电刷换相(mechanical commutation)改为电子式换相(electronic commutation),因而去除了直流伺服电动机因电刷所带来的限制。目前一般永磁式交流伺服电机的回接组件多采用解角器(resolver) 或光电解编码马器(photo encoder),前者可量测转子绝对位置,后者则祇能测得转子旋转的相对位置,电子换相则设计于驱动器内。 表1伺服电机的分类 永磁式直流伺服电动机如图1(a)所示,其永久磁铁在外,而会发热的电枢线圈(armature winding)在内,因此散热较为困难,降低了功率体积比,在应用于直接驱动(direct-drive)系统时,会因热传导而造成传动轴(如导螺杆)的热变形。但对交流伺服电机而言,不论是永磁式或感应式,其造成旋转磁场的电枢线圈,如图1(b)所示,均置于电机的外层,因而散热较佳,有较高的功率体积比,且可适用于直接驱动系统。 交流电机依其扭矩产生方式可分为两大类(1)同步交流电机(synchronous ac motor)与(2)感应交 流电机(induction ac motor),同步交流电机因其转子可由外界电源或由本身磁铁而造成的磁场与定子的旋转磁场交互作用而达到同步转速,但是感应交流电机的转子则因定子与转子间的变压器效应(transformer effect)而产生转子感应磁场,为了维持此感应磁场以产生旋转扭矩,转子与定子的旋转磁场间必须有一相对运动—滑差(slip),因此感应电机的转速无法达到同步转速。
5G无线通信网络中英文对照外文翻译文献(文档含英文原文和中文翻译)
翻译: 5G无线通信网络的蜂窝结构和关键技术 摘要 第四代无线通信系统已经或者即将在许多国家部署。然而,随着无线移动设备和服务的激增,仍然有一些挑战尤其是4G所不能容纳的,例如像频谱危机和高能量消耗。无线系统设计师们面临着满足新型无线应用对高数据速率和机动性要求的持续性增长的需求,因此他们已经开始研究被期望于2020年后就能部署的第五代无线系统。在这篇文章里面,我们提出一个有内门和外门情景之分的潜在的蜂窝结构,并且讨论了多种可行性关于5G无线通信系统的技术,比如大量的MIMO技术,节能通信,认知的广播网络和可见光通信。面临潜在技术的未知挑战也被讨论了。 介绍 信息通信技术(ICT)创新合理的使用对世界经济的提高变得越来越重要。无线通信网络在全球ICT战略中也许是最挑剔的元素,并且支撑着很多其他的行业,它是世界上成长最快最有活力的行业之一。欧洲移动天文台(EMO)报道2010年移动通信业总计税收1740亿欧元,从而超过了航空航天业和制药业。无线技术的发展大大提高了人们在商业运作和社交功能方面通信和生活的能力无线移动通信的显著成就表现在技术创新的快速步伐。从1991年二代移动通信系统(2G)的初次登场到2001年三代系统(3G)的首次起飞,无线移动网络已经实现了从一个纯粹的技术系统到一个能承载大量多媒体内容网络的转变。4G无线系统被设计出来用来满足IMT-A技术使用IP面向所有服务的需求。在4G系统中,先进的无线接口被用于正交频分复用技术(OFDM),多输入多输出系统(MIMO)和链路自适应技术。4G无线网络可支持数据速率可达1Gb/s的低流度,比如流动局域无线访问,还有速率高达100M/s的高流速,例如像移动访问。LTE系统和它的延伸系统LTE-A,作为实用的4G系统已经在全球于最近期或不久的将来部署。 然而,每年仍然有戏剧性增长数量的用户支持移动宽频带系统。越来越多的
伺服电机 1. 伺服电机的定义 伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。伺服电机在伺服系统中控制机械元件运转的发动机. 是一种补助马达间接变速装置。伺服电机可使控制速度, 位置精度非常准确。将电压信号转化为转矩和转速以驱动控制对象。转子转速受输入信号控制,并能快速反应,在自动控制系统中作执行元件,且具有机电时间常数小、线性度高、始动电压低等特点。 2. 伺服电机工作原理 1.伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1 个脉冲,就会旋转1 个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。 2. 交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。 3. 永磁交流伺服电动机简介 20 世纪80 年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90 年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦
中英文翻译 附件1:外文资料翻译译文 通用移动通信系统的回顾 1.1 UMTS网络架构 欧洲/日本的3G标准,被称为UMTS。 UMTS是一个在IMT-2000保护伞下的ITU-T 批准的许多标准之一。随着美国的CDMA2000标准的发展,它是目前占主导地位的标准,特别是运营商将cdmaOne部署为他们的2G技术。在写这本书时,日本是在3G 网络部署方面最先进的。三名现任运营商已经实施了三个不同的技术:J - PHONE 使用UMTS,KDDI拥有CDMA2000网络,最大的运营商NTT DoCoMo正在使用品牌的FOMA(自由多媒体接入)系统。 FOMA是基于原来的UMTS协议,而且更加的协调和标准化。 UMTS标准被定义为一个通过通用分组无线系统(GPRS)和全球演进的增强数据
技术(EDGE)从第二代GSM标准到UNTS的迁移,如图。这是一个广泛应用的基本原理,因为自2003年4月起,全球有超过847万GSM用户,占全球的移动用户数字的68%。重点是在保持尽可能多的GSM网络与新系统的操作。 我们现在在第三代(3G)的发展道路上,其中网络将支持所有类型的流量:语音,视频和数据,我们应该看到一个最终的爆炸在移动设备上的可用服务。此驱动技术是IP协议。现在,许多移动运营商在简称为2.5G的位置,伴随GPRS的部署,即将IP骨干网引入到移动核心网。在下图中,图2显示了一个在GPRS网络中的关键部件的概述,以及它是如何适应现有的GSM基础设施。 SGSN和GGSN之间的接口被称为Gn接口和使用GPRS隧道协议(GTP的,稍后讨论)。引进这种基础设施的首要原因是提供连接到外部分组网络如,Internet或企业Intranet。这使IP协议作为SGSN和GGSN之间的运输工具应用到网络。这使得数据服务,如移动设备上的电子邮件或浏览网页,用户被起诉基于数据流量,而不是时间连接基础上的数据量。3G网络和服务交付的主要标准是通用移动通信系统,或UMTS。首次部署的UMTS是发行'99架构,在下面的图3所示。 在这个网络中,主要的变化是在无线接入网络(RAN的)CDMA空中接口技术的引进,和在传输部分异步传输模式作为一种传输方式。这些变化已经引入,主要是为了支持在同一网络上的语音,视频和数据服务的运输。核心网络保持相对不变,主要是软件升级。然而,随着目前无线网络控制器使用IP与3G的GPRS业务支持节点进行通信,IP协议进一步应用到网络。 未来的进化步骤是第4版架构,如图4。在这里,GSM的核心被以语音IP技术为基础的IP网络基础设施取代。 海安的发展分为两个独立部分:媒体网关(MGW)和MSC服务器(MSS)的。这基本上是打破外连接的作用和连接控制。一个MSS可以处理多个MGW,使网络更具有扩展性。 因为现在有一些在3G网络的IP云,合并这些到一个IP或IP/ ATM骨干网是很有意义的(它很可能会提供两种选择运营商)。这使IP权利拓展到整个网络,一直到BTS(基站收发信台)。这被称为全IP网络,或推出五架构,如图五所示。在HLR/ VLR/VLR/EIR被推广和称为HLR的子系统(HSS)。 现在传统的电信交换的最后残余被删除,留下完全基于IP协议的网络运营,并
加工中心数控技术 出处:数控加工中心的分类以及各自特点 出版社:化学工业出版社; 第1版 (2009年3月16日) 作者:徐衡、段晓旭 加工中心是典型的集高技术于一体的机械加工设备,它的发展代表了一个国家设计制造的水平也大大提高了劳动生产率,降低了劳动成本,改善了工人的工作环境,降低了工人的劳动强度。本文经过对不同运动方案和各部件的设计方案的定性分析比较确定该教立式加工中心的进给传动方案为:采用固定床身,电主轴通过安装座安装在床身导轨的滑座上,床身导轨采用滚动导轨,可以实现Y 方向的进给运动。由X-Y双向精密数控工作台带动工件完成X,Y两个方向的进给运动;X,Y,Z三个方向的进给运动均滚珠丝杠,并由交流伺服电机驱动。导轨、滚珠丝杠有相应的润滑、防护等装置。 加工中心(英文缩写为CNC 全称为Computerized Numerical Control):是带有刀库和自动换刀装置的一种高度自动化的多功能数控机床。在中国香港,台湾及广东一代也有很多人叫它电脑锣。 工件在加工中心上经一次装夹后,数字控制系统能控制机床按不同工序,自动选择和更换刀具,自动改变机床主轴转速、进给量和刀具相对工件的运动轨迹及其他辅助机能,依次完成工件几个面上多工序的加工。并且有多种换刀或选刀功能,从而使生产效率大大提高。 加工中心数控机床是一种装有计算机数字控制系统的机床,数控系统能够处理加工程序,控制机床完成各种动作。与普通机床相比,数控机床能够完成平面曲线和空间曲面的加工,加工精度和生产效率都比较高,因而应用日益广泛。 数控机床的组成 一般来说,数控机床由机械部分、数字控制计算机、伺服系统、PC控制部分、液压气压传动系统、冷却润滑和排泄装置组成。数控机床是由程序控制的,零件的编程工作是数控机床加工的重要组成部分。伺服系统是数控机床的驱动部分,计算机输出的控制命令是通过伺服系统产生坐标移动的。普通的立式加工中心有三个伺服电机,分别驱动纵向工作台、横向工作台、主轴箱沿X向、Y向、Z向运动。X、Y、Z是互相垂直的坐标轴,因而当机床三坐标联动时可以加工空
伺服电机的工作原理图? 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 永磁交流伺服系统具有以下等优点:(1)电动机无电刷和换向器,工作可靠,维护和保养简单;(2)定子绕组散热快;(3)惯量小,易提高系统的快速性;(4)适应于高速大力矩工作状态;(5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2 交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
伺服电机工作原理及和步进电机的区别 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统的快速性波纹管联轴器。⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为3.6°、1.8°,五相混合式步进电机步距角一般为0.72 °、0.36°。也有一些高性能的步进电机步距角更小。如四通公司生产的一种用于慢走丝机床的步进电机,其步距角为0.09°;德国百格拉公司(BERGER LAHR)生产的三相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以松下全数字式交流伺服电机为例,对于带标准2500线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/10000=0.036°。对于带17位编码器的电机而言,驱动器每接收217=131072个脉冲电机转一圈,即其脉冲当量为360°/131072=9.89秒。是步距角为1.8°的步进电机的脉冲当量的1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。振动频率与负载情况和驱动器性能有关,一般认为振动频率为电机空载起跳频率的一半。这种由步进电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当步进电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。 交流伺服电机运转非常平稳膜片联轴器,即使在低速时也不会出现振动现象。交流伺服系统具有共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点,便于系统调整。 三、矩频特性不同