自适应PID控制
摘要:自适应PID控制是一门发展得十分活跃控制理论与技术,是自适应控制理论的一个重要组成部分,本文简要回顾PID控制器的发展历程,对自适应PID控制的主要分支进行归类,介绍和评述了一些有代表性的算法。
关键词:PID控制,自适应,模糊控制,遗传算法。
Abstract: The adaptive PID control is a very active developed control theory and technology and is an important part of adaptive control theory.This paper briefly reviews the development process PID controller.For adaptive PID control of the main branches, the paper classifies,introduces and reviews some representative algorithms. Keywords: PID control, adaptive, fuzzy control, genetic algorithm
1 引言
从问世至今已历经半个世纪的PID控制器广泛地应用于冶金、机械、化工、热工、轻工、电化等工业过程控制之中,PID控制也是迄今为止最通用的控制方法, PID控制是最早发展起来的控制策略之一,因为他所涉及的设计算法和控制结构都很简单,并且十分适用于工程应用背景,所以工业界实际应用中PID 控制器是应用最广泛的一种控制策略(至今在全世界过程控制中用的80% 以上仍是纯PID调节器,若改进型包含在内则超过90%)。由于实际工业生产过程往往具有非线性和时变不确定性,应用常规PID控制器不能达到理想控制效果,长期以来人们一直寻求PID控制器参数的自动整定技术,以适应复杂的工况和高指标的控制要求。随着微机处理技术和现代控制理论诸如自适应控制、最优控制、预测控制、鲁棒控制、智能控制等控制策略引入到PID控制中,出现了许多新型PID控制器。人们把专家系统、模糊控制、神经网络等理论整合到PID控制器中,这样既保持了PID控制器的结构简单、适用性强和整定方便等优点,又通过先进控制技术在线调整PID控制器的参数,以适应被控对象特性的变化。
2 自适应PID控制概念及发展
2.1 PID控制器
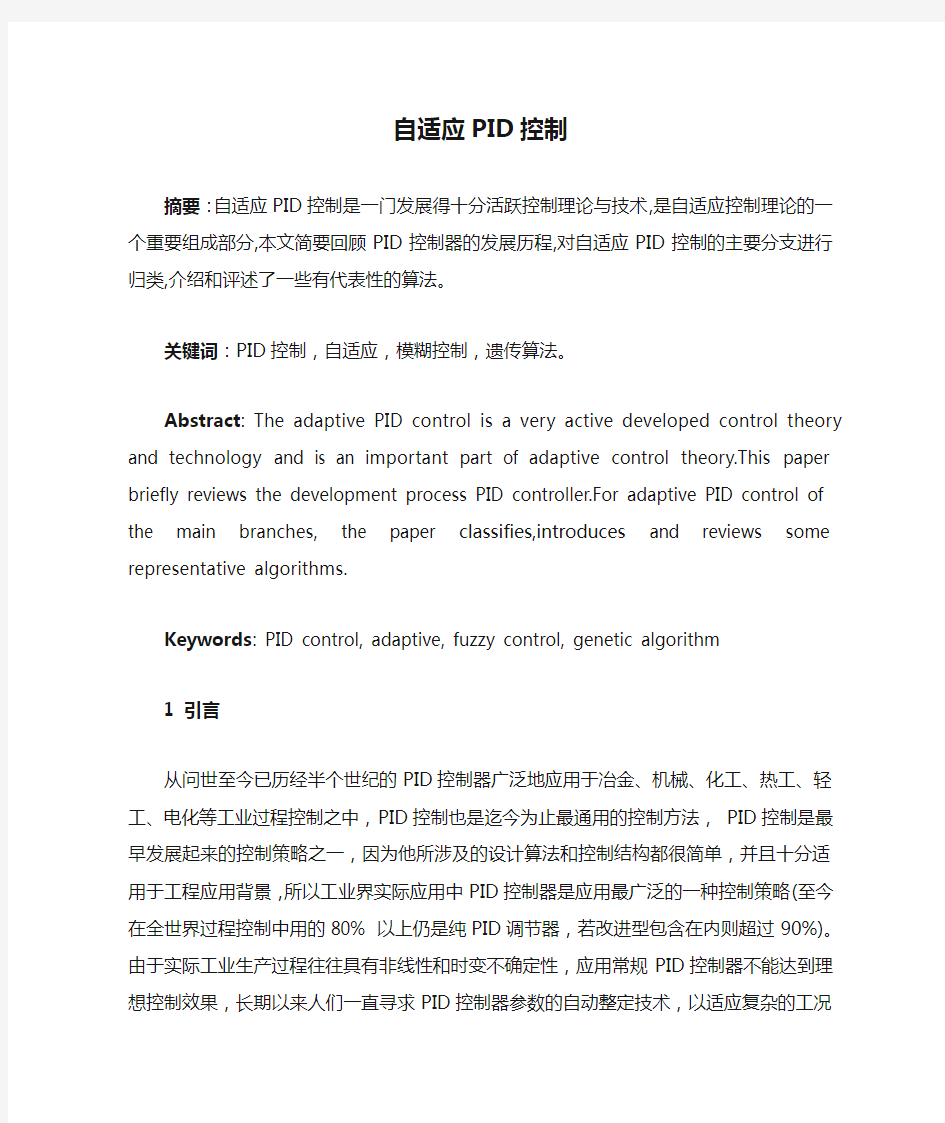
常规PID控制系统原理框图如下图所示,系统由模拟PID控制器和被控对象组成。
PID的标准控制规律:
式中:e(t)—控制器偏差输入;u(t)—控制器输出;Kp,Ki,Kd —比例、积分和微分项系数。
2.2 PID控制器的发展
1936年,英国诺夫威治市帝国化学有限公司(Imperial Chemical Limited in Northwich, England)的考伦德(Albert Callender)和斯蒂文森(Allan Stevenson)等人给出了一个温度控制系统的PID控制器的方法并于1939年获得美国专利。从美国专利局的网站上,可以找到当年获得专利的PID计算公式。
这个公式与我们现在使用的PID公式已经没有很大区别。式中,e代表温度。只是当时把比例积分微分的增益倍数分开了,可以想象当初这样做的原因:用K1来确定积分的强度(斜率),用K3来确定微分的强度。面对这个美妙的、简洁的、普适的思想,我们还是多花点时问关注一下她的生日吧。她的专利的美国存档时问是1936年2月17日。英国的存档时间:1935年2月13日;1939年10月10日批准美国专利申请。这说明PID的诞生时问应该在1935年初了,只是出生证明开在1936年。
1940年以后为革新阶段,在革新阶段,PID控制器已经发展成一种鲁棒的、可靠的、易于应用的控制器。仪表工业的重心是使PID控制技术能跟上工业技术的最新发展。从气动控制到电气控制到电子控制再到数字控制,PID控制器的体积逐渐缩小,性能不断提高。一些处于世界领先地位的自动化仪表公司对PID 控制器的早期发展做出重要贡献,甚至可以说PD控制器完全是在实际工业应用中被发明并逐步完善起来的。
PID控制至今仍是应用最广泛的一种实用控制器。各种现代控制技术的出现并没有削弱PID控制器的应用,相反,新技术的出现对于PID控制技术的发展起了很大的推动作用。一方面,各种新的控制思想不断被应用于PID控制器的设计之中或者是使用新的控制思想设计出具有PID结构的新控制器,PID控制技术被注入了新的活力。另一方面,某些新控制技术的发展要求更精确的PID控制,从而刺激了控制器设计与参数整定技术的发展。
2.3 发展中的自适应PID控制
PID控制技术经过近几年来的研究和发展,近年来国内外学者越来越多地将智能控制技术引入PID控制器的设计与构成。下面将介绍这方面的研究、发展和创新。
2.3.1自寻最优PID控制器
其控制原理是:系统以积分误差性能指标为准则,当误差性能指标为最小时,即系统为最佳状态,此时PID的各参数为最佳参数。常用积分误差性能指标有ISE、IAE、ITAE等,可根据不同控制系统选择不同性能指标。对于随动跟踪控制系统一般可选用ISE积分误差性能指标。
2.3.2模糊PID控制器
模糊控制是一类应用模糊集合理论的控制方法。特别是在一些大滞后、时变、非线性的复杂系统,无法获得系统的精确的数学模型,而模糊控制不需要被控对象的精确数学模型。这种控制器不但具有PID控制精度高等优点,又兼有模糊控制灵活、适应性强的优点,对复杂控制系统和要求高精度的伺服系统可获得优良的控制效果,是近年来控制领域十分活跃的一支分支。
模糊盒树法自适应PID算法,通过对常规PID控制系统性能品质的分析,提出一种PID控制策略,利用模糊盒树的分枝定界算法,以最少的模糊规则推理实现PID参数的自适应调整。该方法具有结构简单、鲁棒性强、动态品质优良的特点。
2.3.3神经元自适应PID控制器
由Windrow提出的自适应神经元,由于具有自适应学习能力,且结构简单、实时性强、无须对控制对象精确建模等优点。在神经非模型控制的基础上,结合PID控制的优点,提出了神经非模型自适应PID控制方法,确定了神经元网络的输入信号,设计出自适应系数的在线修正算法,在使控制系统具有良好的动态性能和稳态性能所进行的研究,取得了一定成效。
2.3.4基于遗传算法的PID控制器
遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化概率搜索算法,其基本思想是将待求解问题转换由个体组成的滨化群体进行操作折一组遗传算子,经历生成一评价一选择一操作的滨化过程,反复进行,自到搜索到最优解。基于遗传算法的PID参数优化方法,这种方法可简化优化的解析计算过程。对免疫反馈和遗传机制的免疫遗传算法进行了讨论和研究,基于该研究提出了一种改进的变参数PID控制策略和鲁棒整定的思想,并采用免疫遗传算法进行设计参数的鲁棒优化调整。
2.3.5基于蚁群算法的PID控制器
蚁群算法是一种新型模拟进化算法,初步的研究表明该算法具有许多优良的性质。蚁群算法是受到人们对自然界真实的蚁群集体行为的研究成果的启发而提出的一种基于种群的模拟进化算法,属于随机搜索算法。由意大利学者M.Dorigo 等人首先提出。仿生学家经过大量细致的观察研究发现,蚂蚁个体之问是通过一种称之为信息激素的物质进行信息传递。蚂蚁在运动过程中,在它所经过的路径上留下该种物质,而且蚂蚁在运动过程中能够感知这种物质,并以此指导自己的
运动方向。因此,由大量蚂蚁组成的蚁群的集体行为便表现出一种信息正反馈现象,某一路径上走过的蚂蚁越多,则后来者选择该路径的概率就越大,从而增加该路径的信息激素强度,这种选择过程称为蚂蚁的自催化过程,其原理是一种正反馈机制,所以蚂蚁系统也称为增强型学习系统。
2.3.6专家智能自整定PID控制器
将专家控制与常规PID控制相结合而具有的自整定、自学习等功能可以用来描述复杂系统的特性,并通过学习和自组织得到相应的控制策略。一些学者对专家自整定PID控制器设计的方法及应用进行了研究,并针对一般专家自整定PID 控制器的不足之处,加入智能自整定控制,提出采用阶梯信号作为系统输入的思路,这种智能自整定PID控制器由于采用了阶梯信号作为系统输入,避免了系统在参数训练过程中频繁启动的问题,还可以根据实际系统变化的要求,灵活地设定给定信号的阶梯数目,以满足一些特殊场合的控制要求,其具有很强的自整定能力,能允许对象模型的结构和参数在较大范围内变化。一种改进的单神经元PID控制的方法,采用专家控制调节单神经元PID控制中的比例增益,有效地解决了单神经元PID控制中学习速度较慢,动态响应时问增长等问题。
3 结束语
自适应PID控制是随着自适应控制的理论发展和在过程控制上的实践而形成和发展的。从一开始就带有强烈的应用色彩。PID控制算法是迄今为止最通用的控制策略,随着计算机技术的迅猛发展,先进控制理论的出现和发展,以及自适应控制技术的引入,使PID控制进入了一个更为深入和广阔的应用大地,自适应PID控制技术将与先进控制理论更为紧密地结合,在先进控制理论推动下,以及微处理器(例如PIC和DSP等)和传感器等硬件的性能的大幅提高,必将是过程控制中极有发展前途的研究和应用方向。
参考文献
[1]代军,苏娅芳,张雪.PID算法及其演变[J].辽宁省交通高等专科学校学报2003, (3) :43-45
[2]陶水华.新型PID控制及其应用[M].北京:机械上业出版社,2002. 11
[3]蒋丽英,李成博,李平.基于最优保留遗传算法的PID参数自寻优[J].仪器仪表学报,2001,22(3):45-46
[4]蔡自兴.智能控制一基础与应用[M].国防工业出版社,1998. 10
[5]方千山.基于模糊盒树法的自适应PID[J].仪器仪表学报,2002,23(3):378-379
[6]腾表芳,秦春林,党建武.神经元自适应PID控制[J].兰州铁道学院学报,2003,22(1):87-89
[7]毛敏,于希宁.基于遗传算法的PID参数优化方法[J].中国电力,2002,35(8):48一51
[8]詹士昌,吴俊.基于蚁群算法的PID参数优化设计[J].测控技术,2004,23(1):69-72
《应用文写作》课程习题集 西南科技大学成人、网络教育学院版权所有 【说明】:本课程《应用文写作》(编号为01016)共有单选题,多项选择题,简答题,写作题,判断题等多种试题类型,其中,本习题集中有[判断题]等试题类型未进入。 一、单选题 1.公文的成文日期,是指() A、公文起草日期 B、公文印制日期 C、领导签发日期 D、公文讨论日期 2.下列关于会议纪要的说法中,错误的是( ) A、会议纪要可采用第一人称写法,如“我们认为”“我们希望”之类。 B、会议纪要是根据会议记录、会议文件或其他会议资料综合整理而成的。 C、会议纪要的成文日期可写在标题之下或正文之后。 D、会议纪要可不写主送机关,只需抄送与会机关和其他需知晓会议情况的机关。 3.下列不属于求职信特点的是() A、目的性 B、自荐性 C、针对性 D、鼓舞性 4.下列属于礼仪文书的是() A、广告 B、贺词 C、海报 D、合同 5.下面不属于规章制度种类的一项是() A、办法 B、条例 C、计划 D、规则 6.签发人是指核准并签发文稿的机关负责人姓名,应当在公文上标注签发人的是 A、上行文 B、下行文 C、平行文 D、所有公文 7.时间较长、范围较广、内容较概括的计划名称是( ) A、规划 B、安排 C、要点 D、设想 8.协议书与经济合同比较,规范程度() A、比经济合同高 B、比经济合同低 C、与经济合同一样高 D、与经济合同一样低 9.论文开题报告() A、由学生写成文章报告 B、由学生制定个性化表格填写
C、由学校制定固定的表格,由学生填写 D、由学校制定固定的表格,由导师填写 10.内容主要侧重在组织纪律等方面,体系稳定完整,表达较为原则的法规文书是() A、规定 B、章程 C、办法 D、细则 11.下级机关针对工作中出现的具体问题,对吃不准的上级方针、政策、法律、条例等,向上级机关申明情况,请求答复和下达处理意见,应该书写的是( ) A、通知 B、请示 C、申请书 D、意向书 12.对下阶段及未来发生的事情只作初步打算或粗线条谋划的计划称为( ) A、设想 B、规划 C、方案 D、安排 13.实验报告呈现学术成果的表达方式,是()的形式 A、论证 B、报告 C、实验 D、实验与报告 14.慰问信的受文对象非常明确,因此,慰问信具有()的特点 A、针对性 B、请求性 C、引导性 D、临时性 15.为解决“应该如何”和“不应该如何”的界限问题,对某些重要工作提出限制性要求的法规文书是() A、规定 B、办法 C、细则 D、守则 16.传达重要精神或情况,应当选用的公文文种是() A、通报 B、通告 C、通知 D、会议纪要 17.计划的灵魂和总纲是() A、前言 B、标题 C、任务和目标 D、步骤和措施 18.分析论证技术上的可行性与经济上的合理性,关系到() A、宏观调控与投资决策的成败 B、公司发展的成败 C、事业发展的成败 D、国家战略的成败 19.证明信的结语部分,另起一行空两格,应写() A、此致 B、敬礼 C、特此证明 D、顺祝安康 20.职业或专业人群的针对性很强,往往作为机构或团体成员共同遵守的职业道德规范的法规文书是() A、办法 B、细则
XXXXXXXXXX 系统辨识与自适应控制课程论文 题目:自适应控制综述与应用 课程名称:系统辨识与自适应控制 院系:自动化学院 专业:自动化 班级:自动化102 姓名: XXXXXX 学号: XXXXXXXXX 课程论文成绩: 任课教师: XXXXX 2013年 11 月 15 日
自适应控制综述与应用 一.前言 对于系统辨识与自适应控制这门课,前部分主要讲了系统辨识的经典方法(阶跃响应法、频率响应法、相关分析法)与现代方法(最小二乘法、随机逼近法、极大似然法、预报误差法)。对于系统辨识,简单的说就是数学建模,建立黑箱系统的输入输出关系;而其主要分为结构辨识(n)与参数辨识(a、b)这两个任务。 由于在课上刘老师对系统辨识部分讲的比较详细,在此不再赘述,下面讨论自适应控制部分的相关内容。 对于自适应控制的概念,我觉得具备以下特点的控制系统,可以称为自适应控制系统: 1、在线进行系统结构和参数辨识或系统性能指标的度量,以便得到系统当前状态的改变情况。 2、按一定的规律确定当前的控制策略。 3、在线修改控制器的参数或可调系统的输入信号。 二.自适应控制综述 1.常规控制系统与自适应控制系统比较 (1)控制器结构不同 在传统的控制理论与控制工程中,常规控制系统的结构主要由控制器、控制对象以及反馈控制回路组成。 而自适应控制系统主要由控制器、控制对象、自适应器及反馈控制回路和自适应控制回路组成。 (2)适用的对象与条件不同 传统的控制理论与控制工程中,当对象是线性定常、并且完全已知的时候,才能进行分析和控制器设计。无论采用频域方法,还是状态空间方法,对象一定是已知的。这类方法称为基于完全模型的方法。在模型能够精确地描述实际对象时,基于完全模型的控制方法可以进行各种分析、综合,并得到可靠、精确和满意的控制效果。 然而,有一些实际被控系统的数学模型是很难事先通过机理建模或离线系统辨识来确知的,或者它们的数学模型的某些参数或结构是处于变化之中的.对于这类事先难以确定数学模型的系统,通过事先整定好控制器参数的常规控制往往难以对付。 面对上述系统特性未知或经常处于变化之中而无法完全事先确定的情况,如何设计一个满意的控制系统,使得能主动适应这些特性未知或变化的情况,这就 是自适应控制所要研究解决的问题.自适应控制的基本思想是:在控制系统的运行过程中,系统本身不断地测量被控系统的状态、性能和参数,从而“认识”或“掌握”系统当前的运行指标并与期望的指标相比较,进而作出决策,来改变控制器的结构、参数或根据自适应规律来改变控制作用,以保证系统运行在某种意义下的最优或次优状态。按这种思想建立起来的控制系统就称为自适应控制系统。
自适应控制文献综述 卢宏伟 (华中科技大学控制科学与工程系信息与技术研究所 M200971940) 摘要:文中对自适应控制系统的发展、系统类型、控制器类型以及国内外自适应控制在工业和非工业领域的应用研究现状进行了较系统的总结。自适应控制成为一个专门的研究课题已超过50年了,至今,自适应控制已在很多领域获得成功应用,证明了其有效性。但也有其局限性和缺点,导致其推广应用至今仍受到限制,结合神经网络、模糊控制是自适应控制今后发展的方向。 关键字:自适应控制鲁棒性自适应控制器 1.自适应控制的发展概况 自适应控制系统首先由Draper和Li 在1951年提出,他们介绍了一种能使性能特性不确定的内燃机达到最优性能的控制系统。而自适应这一专门名词是1954年由Tsien在《工程控制论》一书中提出的,其后,1955年Benner 和Drenick也提出一个控制系统具有“自适应”的概念。 自适应控制发展的重要标志是在1958午Whitaker“及共同事设计了一种自适应飞机飞行控制系统。该系统利用参考模型期望特性和实际飞行特性之间的偏差去修改控制器的参数,使飞行达到最理想的特性,这种系统称为模型参考自适应控制系统(MRAC系统)。此后,此类系统因英国皇家军事科学院的Parks利用李稚普诺夫(Lyapunov)稳定性理论和法国Landau利用Popov 的超稳定性理论等设计方法而得到很大的发展,使之成为—种最基本的自适应控制系统。1974年,为了避免出现输出量的微分信号,美国的Monopli 提出了一种增广误差信号法,因而使输入输出信号设汁的自适应控制系统更加可靠地应用与实际工程中。 1960年Li和Wan Der Velde提出的自适应控制系统,他的控制回路中用一个极限环使参数不确定性得到自动补偿,这样的系统成为自振荡的自适应控制系统。 Petrov等人在1963年介绍了一种自适应控制系统,它的控制数如有一个开关函数或继电器产生,并以与参数值有关的系统轨线不变性原理为基础来设计系统,这种系统称为变结构系统。 1960到1961年Bellman和Fel`dbaum分别在美国和苏联应用动态规划原理设计具有随机不确定性的控制系统时,发现作为辨识信号和实际信号的控制输入之间存在对偶特性,因而提出对偶控制。 Astrom和Wittenmark对发展另一类重要的自适应控制系统,即自校正调节器(STR)作出了重要的贡献。这种调节器用微处理机很容易实现。这一有创见的工作得到各国学者普遍的重视,并且把发展各种新型的STR和探索新的应用工作推向新的高潮,使得以STR方法设计的自适应控制系统在数量上迢迢领先。在这些发展中以英国的Clarker和Gawthrop在1976年提出的广义最小方差自校正控制器最受重视。它克服了自校正调节器不能用于非最小相位系统等缺点。为了既保持自校正调节器实现简单的优点,又有拜较好的
《现代应用文写作》 注意事项: 1、通过在线考试模块完成该课程考核; 2、抄袭、雷同作业一律按零分处理; 1. 邀请函比请柬庄重、典雅,比请柬的使用范围更广泛。 答:错误。请柬比邀请函庄重、典雅,但邀请函比请柬的使用范围更广泛。 2. 某工商局向上级工商局就财务装备和企业登记两项工作中的两个问题形成一份请示,局领导签发后报送上级。 答:错误。请示要坚持一事一文的原则。 3. 某工商局在查办一起商业贿赂案件时,由于对有关问题把握不准,即以函的形式向上级局请示,请求上级局对有关问题给予明确答复和认定。 答:错误。请示工作应使用请示这一文种,不能用函。 满分:5 分 4. 会议记录只具有向广大的群众传达会议议定事项的作用。 答:错误。有些会议本身具有一定的权威,其会议记录一经下发就起着类似于指示、决定或决议等指挥性公文的作用。 满分:5 分 5. 介绍信的存根和本文的内容要完全一致,可以进行涂改。 答:错误。介绍信不得随意涂改,如有涂改,涂改处必须加盖公章,否则视为无效。6. 综述是对事实做客观的陈述,不能任意添加综述者的观点。 答:正确。综述是概括有关领域的研究成果,所以要有客观求实的科学态度,不能添加综述者的观点 7. 求职信中的称谓可以使用“相关人士”或“有关领导”。 答:错误,称谓是对受信者的称呼,对不同的受信者,可以使用不同的称呼。称呼必须恰当 一、判断说明题(判断对错,并简要说明判断的理由。每小题5分,共40分。) 1. 某工商局向上级工商局就财务装备和企业登记两项工作中的两个问题形成一份请示,局领导签发后报送上级。 答:错误。请示要坚持一事一文的原则。 2.某工商局在查办一起商业贿赂案件时,由于对有关问题把握不准,即以函的形式向上级局请示,请求上级局对有关问题给予明确答复和认定。 答:错误。请示工作应使用请示这一文种,不能用函。 3.综述是对事实做客观的陈述,不能任意添加综述者的观点。 答:正确。综述是概括有关领域的研究成果,所以要有客观求实的科学态度,不能添加
三菱PLC和FX2N-4AD-TC实现温度PID闭环控制系统的学习参考。。。。。。
风机鼓入的新风经加热交换器、制冷交换器、进入房间。原理说明:进风不断被受热体加温,欲使进风维持一定的温度,这就需要同时有一加热器以不同加热量给进风加热,这样才能保证进风温度保持恒定。 plc接线图如下,按图接好线。配线时,应使用带屏蔽的补偿导线和模拟输入电缆配合,屏蔽一切可能产生的干扰。fx2n-4ad-tc的特殊功能模块编号为0。
输入和输出点分配表 这里介绍pid控制改变加热器(热盘管)的加热时间从而实现对温度的闭环控制。
在温度控制系统中,电加热器加热,温度用热电耦检测,与热电耦型温度传感器匹配的模拟量输入模块 fx2n-4ad-tc将温度转换为数字输出,cpu将检测的温度与温度设定值比较,通过plc的pid控制改变加热器的加热时间从而实现对温度的闭环控制。pid控制时和自动调谐时电加热器的动作情况如上图所示。其参数设定内容如下表所示。 三菱plc和fx2n-4ad-tc实现温度pid闭环控制系统程序设计:
用选择开关置x10作为自动调谐控制后的pid控制,用选择开关置x11作为无自动调谐的pid控制。 当选择开关置x10时,控制用参数的设定值在pid运算前必须预先通过指令写入,见图程序0步开始,m8002为初始化脉冲,用mov指令将目标值、输入滤波常数、微分增益、输出值上限、输出值下限的设定值分别传送给数据寄存器d500、d512、d515、d532、d533。 程序第26步,使m0得电,使用自动调谐功能是为了得到最佳pid控制,自动调谐不能自动设定的参数必须通过指令设定,在第29步~47步之间用mov指令将自动调谐用的参数(自动调谐采用时间、动作方向自动调谐开始、自动调谐用输出值)分别传送给数据寄存器d510、d511、d502。 程序第53步开始,对fx2n-4ad-tc进行确认、模式设定,且在plc运行中读取来自fx2n-4ad-tc的数据送到plc的d501中,103步开始对pid动作进行初始化。 第116步开始,x10闭合,在自动调谐后实行pid控制,当自动调谐开始时的测定值达到目标值的变化量变化1/3以上,则自动调谐结束,程序第128步~140步,自动调谐
文献综述 题目:汽车车身悬挂系统振动模态分析 摘要:悬架作为汽车的重要部件,对汽车的行驶平顺性和操纵稳定性有着直接的影响。本课题主要讨论汽车车身悬挂系统的振动参数,利用ANSYS有限元数值模型计算以及校正。通过研究分析,得到正确的振动参数和外部形状,为设计车身悬挂系统提供理论基础。 关键词:汽车悬挂系统振动参数振动模态分析 引言:悬架系统是汽车底盘中的主要总成件,在汽车的行驶过程中传递车架(或车身)与车轮之间的所有的力与力矩同时降低路面对的车架(或车身)的冲击载荷,衰减路面冲击给车架(或车身)带来的振动,保证了汽车行驶的平顺性与安全性。麦弗逊悬架作为一种独立悬架由于其结构简单,占用空问小,增大了两前轮内侧的空间,便于发动机和其他一些部件的布置,在现在乘用车上得到广泛应用。悬架振动特性分析可以用MATLAB数值计算,ADMAS、CarSim仿真,也可以用ANSYS有限元方法计算。本课题旨在建立车身悬架多自由度动力学模型。利用CATIA软件或者ANSYS软件建立简单车身三维模型,利用ANSYS软件分析车身悬架系统,计算车辆的振动模态。此研究能够揭示悬架性能、车辆平顺性和悬架参数之间的相互关系,对车辆悬架系统的设计和研究具有一定参考意义。 一.国内外研究现状 1.1国内研究概况 厦门金龙,丹东黄海等客车厂家生产的大型铰接BRT城市客车均采用了一种新配置——电子控制空气悬架(ECAS系统)。 近年来,国内外学者对悬架控制方法进行了大量的研究,控制方法几乎涉及到所有的控制理论的所有分支,许多控制方法如天棚阻尼控制、PID控制、最优控制、自适应控制、神经网络控制、滑模变结构控制、模糊控制等在悬架系统上得到了应用。 1.2国外研究概况 主动悬架的概念是由Erspiel-labrosse于1954年提出来的,首先使主动悬
最优控制综述 摘要:本文主要阐述了关于最优控制问题的基本概念。最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科,解决最优控制问题的主要方法有古典变分法、极大值原理和动态规划,同时本文也介绍了最优控制理论在几个研究领域中的应用,并对最优控制理论做了一定的总结。 关键字:最优控制;最优化;最优控制理论 Abstract: This article mainly elaborated on the basic concept of optimal control problems. Optimal control theory is studied and solved from all possible solutions to find the optimal solution of a discipline, to solve optimal control problems of the main methods are classical variational method, with the maximum principle and dynamic programming principle. At the same time, this paper also introduces the application of optimal control theory in several research fields, and a summary of optimal control theory. Key Words: Optimal control; optimization; optimal control theory 1.引言 最优控制是现代控制理论的重要组成部分,它研究的主要问题是:在满足一定约束条件下,寻求最优控制策略,使得性能指标取极大值或极小值。最优控制是使控制系统的性能指标实现最优化的基本条件和综合方法。可概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。最优控制是最优化方法的一个应用。从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。 最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科,基本内容和常用方法包括动态规划、最大值原理和变分法。这方面的开创性工作主要是由贝尔曼(R.E.Bellman)提出的“动态规划”和庞特里亚金等人提出的“极大值原理”,到了60年代,卡尔曼(Kalman)等人又提出了可控制性及可观测性概念,建立了最优估计理论。这方面的先期工作应该追溯到维纳(N.Wiener)等人奠基的控制论(Cybernetics)。最优控制理论的实现离不开最优化技术。控制系统最优化问题,包括性能指标的合理选择以及最优化控制系统的设计,而性能指标在很大程度上决定了最优控制性能和最优控制形式。最优化技术就
应用文写作考试 一、多项选择题 1.适用于报告写作的事项有(ACE)。 A.向上级汇报工作,反映情况 B.向下级或有关方面介绍工作情况 C.向上级提出工作建议 D.答复群众的查询、提问 E.答复上级机关的查询、提问 2.工作报告的内容包括(ACDE)。 A.经常性的工作情况 B.偶发性的特殊情况 C.向上级汇报今后工作的打算 D.对上级机关的查问做出答复 E.向上级汇报的工作经验 3.适合作报告结尾的习惯用语有(AC)。 A.“特此报告” B.“以上报告,请批复” C.“以上报告,请审示” D.“请批准” E.“如无不妥,请批准” 4.适合请示的事项有(BCDE)。 A.向上级汇报工作情况,请求上级指导 B.下级无权解决的问题,请求上级机关作出指示 C.下级无力解决的问题,请求上级机关帮助解决
D.按规定不能自行处理,应经上级批准的事项 E.工作中出现的一些涉及面广而下级无法独立解决必须请求上级机关协调和帮助的问题 5.下列事项中,应该用请示行文的有(ACD)。 A.××县教育局拟行文请求上级拨款修复台风刮毁的学校 B.××县政府拟行文向上级汇报本县灾情 C.××集团公司拟行文请求上级批准引进肉食品加工自动化生产线 D.××海关拟行文请求上级明确车辆养路费缴纳标准 E.××市政府拟行文向上级反映农民负担增加的情况 6.“请示”应当(AC)。 A.一文一事 B.抄送下级机关 C.一般只写一个主送机关 D.不考虑上级机关的审批权限和承受能力 7.下列标题中正确的有(BDE)。 A.××分公司关于请求批准开发新产品的报告 B.××县人民政府关于解决我县高寒山区贫困户移民搬迁经费的请示 C.××县人民政府关于请求将××风景区列为省级自然保护区的请示报告 D.××公司关于解决生产用地的请示 E.××省移民办公室关于对移民区域作适当调整的请示 7.请示的下列结语中,正确的有(ACD)。 A.特此请求,请批复
温度控制与PID算法 温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。 1.温度控制的框图 这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。其调节过程如下:
温度控制的功率输出采用脉宽调制的方法。固态继电器SSR的输出端为脉宽可调的电压U OUT 。当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN 其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。 2.温度控制的两个阶段 温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。这给温度的控制带来了困难。因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。为了合理地处理系统响应速度(即加热速度)与系统稳定性之间地矛盾,我们把温度控制分为两个阶段。
先进控制技术大作业
自适应控制技术综述及仿真 1自适应控制系统综述 1.1自适应控制的发展背景 自适应控制器应当是这样一种控制器,它能够修正自己的特性以适应对象和扰动的动特性的变化。这种自适应控制方法应该做到:在系统运行中,依靠不断采集控制过程信息,确定被控对象的当前实际工作状态,优化性能准则,产生自适应控制规律,从而实时地调整控制器结构或参数,使系统始终自动地工作在最优或次最优的运行状态。自从50年代末期由美国麻省理工学院提出第一个自适应控制系统以来,先后出现过许多不同形式的自适应控制系统。模型参考自适应控制和自校正调节器是目前比较成熟的两类自适应控制系统 模型参考自适应控制系统发展的第一阶段(1958年~1966年)是基于局部参数最优化的设计方法。最初是使用性能指标极小化的方法设计MRAC,这个方法是由Whitaker等人于1958年在麻省理工学院首先提出来的,命名为MIT规则。接着Dressber,Price,Pearson等人也提出了不同的设计方法。这个方法的主要确点是不能确保所设计的自适应控制系统的全局渐进稳定;第二阶段(1966~1974年)是基于稳定性理论的设计方法。Butchart和Shachcloth、Parks、Phillipson等人首先提出用李亚普诺夫稳定性理论设计MRAC系统的方法。在选择最佳的李亚普诺夫函数时,Laudau采用了波波夫超稳定理论设计MRAC系统;第三阶段(1974-1980年)是理想情况(即满足假定条件)下MRAC系统趋于完善的过程。美国马萨诸塞大学的Monopoli提出一种增广误差信号法,当按雅可比稳定性理论设计自适应律时,利用这种方法就可以避免出现输出量的微分信号,而仅由系统的输入输出便可调整控制器参数;针对一个控制系统控制子系统S进行研究,通常现代控制理论把大型随机控制系统非线性微分方程组式简化成一个拥有已知的和具有规律变化性的系统数学模型。但在实际工程中,被控对象或过程的数学模型事先基本都难以仅采用简单的数学模型来确定,即使在某一特定条件下确定的数学模型,在条件改变了以后,其动态参数乃至于模型的结构仍然可能发生变化。为此,针对在大幅度简化后所形成的拥有已知的和预先规律变化性的系统数学模型,需要设计一种特殊的控制系统,它能够自动地补偿在模型阶次、参数和输入信号方面未知的变化,
最优控制综述 摘要:最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。从经济意义上说,是在一定的人力、物力和财力资源条件下,使经济效果达到最大(如产值、利润),或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。而最优控制通常针对控制系统而言,目的在于使一个机组、一台设备或一个生产过程实现局部最优。本文重点阐述了最优系统常用的变分法、极小值原理和动态规划三种方法的基本理论及其在典型系统设计中的应用。 关键词:变分法、极小值原理、动态规划 1 引言 最优控制是分析控制系统常用的方法,是现代控制理论的核心之一。它尤其与航空航天的制导、导航和控制技术密不可分。最优控制理论所研究的问题可以概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标最优。 这类问题广泛存在于技术领域或社会问题中。例如,确定一个最优控制方式使空间飞行器由一个轨道转换到另一轨道过程中燃料消耗最少,选择一个温度的调节规律和相应的原料配比使化工反应过程的产量最多,制定一项最合理的人口政策使人口发展过程中的老化指数、抚养指数和劳动力指数为最优等,都是一些经典的最优控制问题。 最优控制问题是要在满足约束条件下寻求最优控制函数,使目标泛函取极值。求解动态最优化问题的方法主要有古典变分法,极小值原理及动态规划法等。 2 研究最优控制的前提条件 2.1状态方程 对连续时间系统: x t=f x t,u t,t 对离散时间系统:x(k+1)=f x k,u k,k k=0,1,……,(N-1)
应用文写作的重要性 1 学习目标: 1、理解应用写作的性质,理解学习本门课程的作用。 2、掌握应用文的概念,理解其种类和特点。 3、提出本门课学习要求。 教学重点难点: 知道应用文写作的重要性。 教学过程: 一导入: 1、故事导入:博士”寻驴 2、小结:当我们在初中高中时代,很少接触应用文这种题材,于是应用文就这样被我们忽略了。随着年龄的增长,越来越发现应用文在我们生活中的重要性。如果想要正常的工作生活,绝对不能缺少了应用文。 二新授: 1、应用文的概念 《辞海》的解释是:应用文是人们在日常生活、工作和学习中所应用的简易通俗文字,包括书信、公文、契约、启事、条据等。 《国家行政机关公文处理办法》中对公文的定义:应用文是机关团体、企事业单位以及人民群众在日常工作、生产和生活中办理公务以及个人事务时,交流情况、沟通信息,具
有直接实用价值和惯用格式的一种书面交际工具。
应用文的广义概念:国家机关、企事业单位、社会团体以及人民群众办理公私事务、传播信息、表达意愿所使用的实用性文章。 2、为什么大学生需要学习应用写作? 应用文的使用非常广泛,几乎涉及各个领域、各个部门、各个阶层、每个个人。比如,科研单位的人员,需要用学术论文;政府机关指导工作,需要用公文;工商企业经营,需要用合同;打官司,需要用诉状;即使个人今天生病了、不能上课,也需要用到请假条;……。相对于其它文体来说,应用文的使用频率要高得多:许多人可以一辈子不写小说、剧本、诗歌、散文,但他在工作、生活、学习中却免不了要写应用文,小到写张请假条,大到计划、总结、论文等。正如叶圣陶先生所说的那样:“大学毕业生不一定能写小说诗歌,但是一定要能写工作和学习中实用的文章,而且非写得既通顺又扎实不可。” 可以这么说,应用文使用的广泛,已经到了无所不在的程度。今天在中国特色的社会主义市场经济条件下,应用文是任何企事业单位和个人日常工作、生活中不可缺少的一个重要工具。 应用文到处可见,机关的文件、报纸的新闻、财务报表…..人们习以为常,也许会认为撰写应用文很简单。其实不然,要学会写应用文,同样需要同学们付出艰苦的劳动。
一、引言 惯性技术是惯性制导、惯性导航与惯性测量等技术的统称。惯性技术已应用于军用与民用的众多技术领域中,应用于宇宙飞船、火箭、导弹、飞机、舰船等各种运载器上。在各类导航系统(例如无线电导航、天文导航等)中,惯性导航系统被认为是最有发展前途的一种导航系统。惯性导航系统依照惯性原理,利用惯性元件(加速度计和陀螺仪)来测量载体本身的加速度和角速度,经一系列运算后得到载体的导航参数,从而达到对载体导航定位的目的。惯性导航是一种自主式的导航方法,它既不需要向外界发送信号,也不需要从外界接收信号,所以, 它具有隐蔽性好,工作不受气象条件制约和外界干扰等优点,从而广泛地应用于军用和民用的众多领域中。 随着现代数学、现代控制理论与计算机技术的发展,在平台惯导系统的基础上又发展出了捷联惯导系统。捷联系统是将惯性元件(陀螺和加速度计)直接安装在载体上,直接承受载体角运动,不再需要稳定平台和常平架系统的惯性导航系统。捷联管道系统使用数学平台而非物理平台,简化了平台框架和相连的伺服装置,因而消除了平台稳定过程中的误差,简化了硬件,提高了可靠性和可维护性,降低了成本,体积小、重量轻。 在捷联惯导系统中,用加速度计代替陀螺仪测量运动载体的角速度,称为无陀螺捷联惯导系统(The Gyroscope Free Strapdown Inertial Navigation System,简称GFSINS)。GFSINS舍弃了陀螺,所以能够避开由于陀螺的抗震性差、恢复时间长、动态范围小等缺陷所引起的一系列难以解决的关键技术问题。目前无陀螺捷联惯导系统给的研究已经引起了国内外很多专家学者的重视。无陀螺捷联惯导系统成本低,可靠性高,功率低,寿命长,反应速度快,适用于角加速度大、角速度动态范围大、冲击大的载体的惯性导航,也适合一些较短程飞行器的惯性制导,还可以与其它导航装置组成组合导航系统。 无陀螺捷联惯导系统虽然具有多种突出的优点,但也有美中不足之处。与传统的惯导系统相比,无陀螺捷联惯导系统的载体角速度是从加速度计输出的比力信号中解算出的,且各轴角速度信号互相耦合,因此,目前广泛应用的六加速度计配置方案和九加速度计配置方案都采用了方便解耦的配置,一般选择角加速度作为解算对象,角速度为辅助或不用。而由角加速度到角速度需要一次积分,到姿态需要两次积分,造成角速度计算值和导航参数的误差随时间增长不断积累。此外,加速度计精度和加速度计的安装精度也对无陀螺惯导系统的精度有所制约。 随着加工技术及数字计算机的发展、高精度加速度计的不断问世、滤波技术、组合导航技术的发展,无陀螺捷联惯导系统的研究具有重要意义和广阔的应用前景。本文后续内容中就对无陀螺捷联惯导系统的研究动态和发展前景进行了介绍。 二、国内外研究动态 惯性测量通常利用加速度计敏感线加速度,用陀螺仪敏感角速度来确定载体的姿态。惯性测量系统应用于炮射制导弹药时,炮弹减旋后出炮口的转速仍然很高,比如155mm炮弹的减旋后转速仍达15r/s~20r/s。发射时,炮弹在火药压力下做高加速旋转运动,速度在数毫秒内达到数百m/s,炮弹所受轴向加速度可达几千到几十万个m/s2。这样恶劣的环境对陀螺和加速度计的性能有很高要求:动
温度的PID 控制 一.温度检测部分首先要OK. 二、PID 调节作用 PID 控制时域的公式 ))()(1)(()(?++ =dt t de Td t e Ti t e Kp t y 分解开来: (1) 比例调节器 y(t) = Kp * e(t) e(k) 为当前的温差(设定值与检测值的插值) y(k) 为当前输出的控制信号(需要转化为PWM 形式) # 输出与输入偏差成正比。只要偏差出现,就能及时地产生与之成比例的调节 作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。但是, Kp 过大会导致动态品质变坏,甚至使系统不稳定。比例调节器的特性曲线. (2) 积分调节器 y(t) = Ki * ∫(e(t))dt Ki = Kp/Ti Ti 为积分时间 #TI 是积分时间常数,它表示积分速度的大小,Ti 越大,积分速度越慢,积分作用越弱。只要偏差不为零就会产生对应的控制量并依此影响被控量。增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。 (3) 微分调节器 y(t) = Kd*d(e(t))/dt Kd = Kp*Td Td 为微分时间 #微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。偏差变化越快,则产生的阻止作用越大。从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。 三.PID 算法: 由时域的公式离散化后可得如下公式:
y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2) y(k) 为当前输出的控制信号(需要转化为PWM形式) y(k-1)为前一次输出的控制信号 e(k) 为当前的温差(设定值与检测值的插值) e(k-1) 为一次前的温差 e(k-2) 为二次前的温差 Kp 为比例系数 Ki = Kp*T/Ti T为采样周期 Kd = Kp*Td/T 四.PID参数整定(确定Kp,Ts,Ti,Td): 温度控制适合衰减曲线法,需要根据多次采样的数据画出响应曲线。 所以需要通过串口将采样时间t, 输出y(t)记录下来,方便分析。 1)、不加入算法,系统全速加热,从常温加热到较高的温度的时间为Tk, 则采样时间一般设为 T = Tk/10。 2)、置调节器积分时间TI=∞,微分时间TD=0,即只加比例算法: y(k) = y(k-1)+Kp*e(k) 比例带δ置于较大的值。将系统投入运行。(δ = 1/Kp) 3)、待系统工作稳定后,对设定值作阶跃扰动,然后观察系统的响应。若响应振荡衰减太快,就减小比例带;反之,则增大比例带。如此反复,直到出现如图所示的衰减比为4:1的振荡过程时,记录此时的δ值(设为δS),以及TS 的值(如图中所示)。当采用衰减比为10:1振荡过程时,应用上升时间Tr替代 振荡周期TS计算。 系统衰减振荡曲线 图中,TS为衰减振荡周期,Tr为响应上升时间。 据表中所给的经验公式计算δ、TI及TD的参数。
自适应PID控制 摘要:自适应PID控制是一门发展得十分活跃控制理论与技术,是自适应控制理论的一个重要组成部分,本文简要回顾PID控制器的发展历程,对自适应PID控制的主要分支进行归类,介绍和评述了一些有代表性的算法。 关键词:PID控制,自适应,模糊控制,遗传算法。 Abstract: The adaptive PID control is a very active developed control theory and technology and is an important part of adaptive control theory.This paper briefly reviews the development process PID controller.For adaptive PID control of the main branches, the paper classifies,introduces and reviews some representative algorithms. Keywords: PID control, adaptive, fuzzy control, genetic algorithm 1 引言 从问世至今已历经半个世纪的PID控制器广泛地应用于冶金、机械、化工、热工、轻工、电化等工业过程控制之中,PID控制也是迄今为止最通用的控制方法, PID控制是最早发展起来的控制策略之一,因为他所涉及的设计算法和控制结构都很简单,并且十分适用于工程应用背景,所以工业界实际应用中PID 控制器是应用最广泛的一种控制策略(至今在全世界过程控制中用的80% 以上仍是纯PID调节器,若改进型包含在内则超过90%)。由于实际工业生产过程往往具有非线性和时变不确定性,应用常规PID控制器不能达到理想控制效果,长期以来人们一直寻求PID控制器参数的自动整定技术,以适应复杂的工况和高指标的控制要求。随着微机处理技术和现代控制理论诸如自适应控制、最优控制、预测控制、鲁棒控制、智能控制等控制策略引入到PID控制中,出现了许多新型PID控制器。人们把专家系统、模糊控制、神经网络等理论整合到PID控制器中,这样既保持了PID控制器的结构简单、适用性强和整定方便等优点,又通过先进控制技术在线调整PID控制器的参数,以适应被控对象特性的变化。 2 自适应PID控制概念及发展 2.1 PID控制器 常规PID控制系统原理框图如下图所示,系统由模拟PID控制器和被控对象组成。
最优控制问题求解方法综述 Summary of approaches of optimal control problem 摘要:最优控制问题就是依据各种不同的研究对象以及人们预期达到的目的,寻找一个最优控制规律或设计出一个最优控制方案或最优控制系统。解决最优问题的主要方法有变分法、极小值原理和动态规划法,本文重点阐述了各种方法的特点、适应范围、可求解问题的种类和各种方法之间的互相联系。 Abstract:Optimal control problems are to find an optimal control law or design a optimal control program or system according to various kinds of different research objects and the aim people want. The approaches to solve optimal control problems generally contain variational method, the pontryagin minimum principle and dynamic programming. This paper mainly states characteristics, range of application, kinds of the solvable problems of each approach and the association between these three methods. 关键词:最优控制、变分法、极小值、动态规划 Keywords: optimal control , classical variational method , the pontryagin minimum principle , dynamic programming 正文: 最优控制理论是现代控制理论的一个主要分支,着重于研究使控制系统的性能指标实现最优化的基本条件和综合方法。最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科。它所研究的问题可以概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。这类问题广泛存在于技术领域或社会问题中。 Optimal control theory is a main branch of modern control theory, which focuses on studying basic conditions and synthetic approaches of optimizing systematic performance index. Optimal control theory is a subject studying and solving for the optimal solution from all possible control solutions. What it study can be summarized in this way: given a manipulated dynamic system or motor process, we are supposed to find a optimal control solution from allowable solutions of the same category, making the systematic movement transfer to the appointed state from a original state and getting a optimal performance index at the same time. And this kind of problems exist in technology field or social problems. 为了解决最优控制问题,必须建立描述受控运动过程的运动方程,给出控制变量的允许取值范围,指定运动过程的初始状态和目标状态,并且规定一个评价运动过程品质优劣的性能指标。通常,性能指标的好坏取决于所选择的控制函数和相应的运动状态。系统的运动状态受到运动方程的约束,而控制函数只能在允许的范围内选取。因此,从数学上看,确定最优控制问题可以表述为:在运动方程和允许控制范围的约束下,对以控制函数和运动状态为变量的性能指标函数(泛函)求取极值(极大值或极小值)。解决最优控制问题的主要方法有古典变
温度PID 控制实验 一、实验目的 1.加深对PID 控制理论的理解; 2.认识Labview 虚拟仪器在测控电路的应用; 3.掌握时间比例P、积分I、微分D 对测控过程连续测控的影响以及提高测控系统的精度; 4.通过实验,改变P、I、D 参数,观察对整个温度测控系统的影响; 5.认识固态继电器和温度变送器,了解其工作原理。 二、预习要点 1.PID 控制理论与传递函数。请学生在0-100 的范围里,自己选择较好的KP,KI,KD 值,用该控制参数进行后续实验; 2.了解A/D、D/A 转换原理; 3.Labview 虚拟仪器图形软件(本实验指导书附录中对使用环境详细介绍)。 三、实验原理 温度是通过固态继电器的导通关断来实现加热的,控制周期即是一个加热和 冷却周期,PID 调节的实现也是通过这个周期实现的,在远离温度预设值的时固 态继电器在温度控制周期中持续加热(假设导通时间是T),在接近温度预设值 时通过PID 得到的值来控制这一周期内固态继电器的开关时间(假设导通时间是 1/2T)维持温度(假设导通时间是1/4T)。如图1 所示: 图1 加热周期控制示意图 8 四、实验项目 1.用PID 控制水箱温度; 2.用控制效果对比完成数据对比操作,选出最佳值。 五、实验仪器 ZCK-II 型智能化测控系统。 六、实验步骤及操作说明 1.打开仪器面板上的总电源开关,绿色指示灯亮起表示系统正常;
2.打开仪器面板上的液位电源开关,绿色指示灯亮起表示系统正常; 3,确保贮水箱内有足够的水,参照图2 中阀门位置设置阀门开关,将阀门1、3、5、6 打开,阀门2、4 关闭; 图2 水箱及管道系统图 4.参看变频器操作说明书将其设置在手动操作挡; 5.单击控制器RUN 按钮,向加热水箱注水,直到水位接近加热水箱顶部,完 全 淹没加热器后单击STOP 按钮结束注水; 6.关闭仪器面板上的液位电源开关,红色指示灯亮起表示系统关闭; 7.打开仪器面板上的加热电源开关,绿色指示灯亮起表示系统正常; 8.打开计算机,启动ZCK-II 型智能化测控系统主程序; 9.用鼠标单击温度控制动画图形进入温度控制系统主界面,小组实验无须在个 人信息输入框填写身份,直接确定即可; 10.在温度系统控制主界面中,单击采集卡测试图标,进入数据采集卡测试程序。 请在该选项中确定选择设备号为端口1,因为我们接入数据采集卡的端口是1 号 9 端口,其他数据端口留做其他方面使用的,所以切记不能选错,否则程序会报 错 并强制关闭。选择采集通道时请选择0 号通道即温度传感器占用的通道。控制上、 下限选项是为设置报警电路所预设的,在本实验中暂未起用该功能,感兴趣的 同 学可以试着完善它,本实验报警数值是+1V 以下和+5V 以上,这里只做了解即可。 采样点数(单位:个)、采样速率(单位:个/秒)和控制周期(单位:毫秒) 请 参照帮助显示区进行操作,一切设置确认无误后即可单击启动程序图标,观察 温 度和电压的变化,也可以单击冷却中左边的开关按钮进入加热程序,观察温度 上 升曲线及电流表和电压表变化,确认传感器正常工作后点击程序结束,等待返 回 主界面图标出现即可返回温度控制主界面进入下一步实验。 11.在温度系统控制主界面中,单击传感器标定图标,进入传感器标定程序。 本 程序界面和数据采集卡测试程序界面基本相同,操作请参照步骤10 进行,一切 设置确认无误后即可单击启动程序图标,观察温度和电压的变化,同时用温度