
汽车悬挂系统的固有频率和阻尼比测量汽车悬挂系统的固有频率和阻尼比测量一、测量仪器
DH5902坚固型动态数据采集系统,DH105E加速度传感器,DHDAS基本控制分析软件,阻尼比计算软件。
二、测量方法
、试验在汽车满载时进行。根据需要可补充空载时的试验。试验前称量汽1 车总质量及前、后轴的质量。
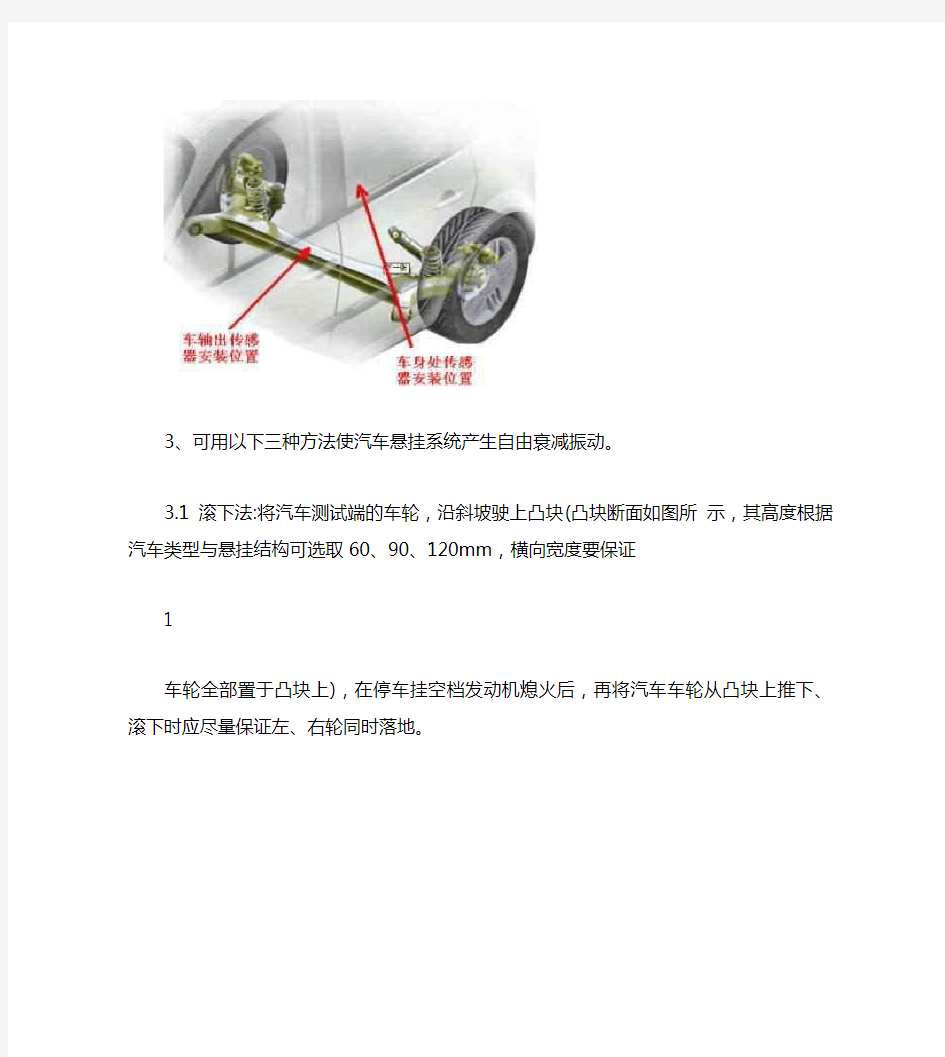
2、DH105E加速度传感器装在前、后轴和其上方车身或车架相应的位置上。
3、可用以下三种方法使汽车悬挂系统产生自由衰减振动。
3.1 滚下法:将汽车测试端的车轮,沿斜坡驶上凸块(凸块断面如图所示,其高度根据汽车类型与悬挂结构可选取60、90、120mm,横向宽度要保证
1
车轮全部置于凸块上),在停车挂空档发动机熄火后,再将汽车车轮从凸块上推下、滚下时应尽量保证左、右轮同时落地。
3.2 抛下法:用跌落机构将汽车测试端车轴中部由平衡位置支起60或90mm,然后跌落机构释放,汽车测试端突然抛下。
3.3 拉下法:用绳索和滑轮装置将汽车测试端车轴附近的车身或车架中部由平衡位置拉下60或90mm,然后用松脱器使绳索突然松脱。
注:用上述三种方法试验时,拉下位移量、支起高度或凸块高度的选择要保证悬架在压缩行程时不碰撞限位块,又要保证振动幅值足够大与实际使用情况比较接近。对于特殊的汽车类型与悬架结构可以选取60、90、120mm以外的值。
4、数据处理
4.1 用DH5902采集仪记录车身和车轴上自由衰减振动的加速度信号;
4.2 在DHDAS软件中对车身与车轴上的加速度信号进行自谱分析,截止频率使用20Hz低通滤波,采样频率选择50Hz,频率分辨率选择0.05Hz;
4.3 加速度自谱的峰值频率即为固有频率;
4.4 在DHDAS软件中选择频响分析,车轴上的信号作为输入,车身上的信号作
为输出得到幅频特性曲线,采样频率选择200Hz,该曲线的峰值频率为车轮部分不运动时的车身部分的固有频率f’,有软件中的阻尼比计算模块直接0 得出阻尼比。
2
三、仪器指标
1、DH5902数据采集仪
1.1通道数:每个模块由控制单元、供电单元和最多四组各种类型测试单元任意组合而成,每单元有4个测试通道;
1.2 控制单元内置了高性能嵌入式计算机、抗振高速电子硬盘(32G),100M以
太网接口;无线以太网接口。
1.3 采样速率:所有通道连续同步采样,每通道10、20、50、100、200、500、1k、2k、5k、10k、20k、50k、100k(Hz)分档切换。
1.4 每通道具有独立的16Bit ADC, 独立的DSP,并行同步采样;
1.5 抗混滤波器:模拟,DSP数字抗混滤波,截止频率:采样速率的(1/
2.56)
倍,阻带衰减:,120dB/Oct,平坦度0.05dB/Oct;
1.6 数据采集记录方式:连续采样,采样深度由模块内置高速电子硬盘剩余容
量决定;
1.7 应变、电压测试单元(选件):
1.7.1 输入阻抗:10MΩ+10MΩ;
1.7.2电压满度值: ?50mV、?100mV、?200mV、?500mV、?1V、?2V、?5V、?10V;
1.7.3 应变满度值:?1000με、?10000με、?100000με;
1.7.4 桥路方式:全桥、半桥;
1.7.5 每个模块尺寸:200 mm×20 mm×167 mm;
1.8 供电: 智能化管理的可充电锂电池组供电,220V交流电源,电池供电和外部供电可实现无缝切换;
1.9使用环境: 符合GB6587.1,86,III组条件;
1.10 外形尺寸:200 mm×170 mm×167 mm(32通道)。
2、DH105E加速度传感器
22.1.灵敏度(mV/m?s):100
2.2.安装谐振频率(kHz):6
2.3.频率范围(Hz) 0.1,1000
22.4.测量范围(m/s) 50
2.5.冲击极限(m/s2) 1000
2.6.横向灵敏度比:,5%
2.7.安装方式:底座M6螺纹
3
2.8.内部结构形式: 剪切
2.9.使用温度(?): -20,80
四、软件功能
1设置系统参数、通道参数、采样参数等;光标显示、窗口显示、图形显示等;
2 实时计算最大值、最小值、峰峰值、平均值、有效值、均方差等;
3 应力应变测量时,输入桥路方式、应变计电阻、导线电阻、应变计灵敏度系数,软件完成对测量结果的自动修正。输入被测试件材料的弹性模量和泊松比,软件将完成应力及两片直角、三片45?直角、60?等边三角形、伞形、扇形等应变花主应力及方向的计算。
4 具有外触发、定时触发、信号触发等多种触发模式,有连续记录、记忆示波器等采样方式。
5 同时显示任意通道采集数据及曲线(包括采集数据的实时曲线及各种实时处理后的数据、曲线)。
6 软件实时性好,采样过程中可以动态开设或关闭窗口,动态切换或增减显示通道,动态设置其显示方式,动态缩放曲线及窗口。
7 将任意两通道的测量数据定义为x轴和y轴,边采样边绘制成曲线,完成x-y 记录仪(滞回曲线)的功能。
8 基本分析功能有:自相关(有偏)、自相关(无偏)、互相关(有偏)、互相关(无偏);概率密度、累积密度、直方图、累积直方图;实时谱、平均谱、倍频程和1/3倍频程分析、三维谱阵;自功率谱、互功率谱、频响函数、相干函数、脉冲响应函数;实倒谱、复倒谱、逆复倒谱;重采样低通滤波、修正(去直流、去线性趋势)、数据段的截取、删除、另存、平滑处理、时域或频域的积分与微分、数字滤波器设计及滤波处理、曲线拟合、任意点数FFT变换、虚拟通道计算 ;
9 该软件采集的数据可以被我公司的其他系列分析软件所调用,进行各种分析处理。
10 通过机器自带的网端接入有线或无线路由器,可实现远程网络控制。
11 远程数据回收功能。可使您无需到现场进行数据回收,只需在远程的电脑终端,通过网络传输,将数据回收到本地硬盘中。
12 数据事后处理功能。将回收的数据进行事后的分析与处理,并把数据保存为通用的*.txt、*.xls等格式。
13 具有良好的可移植性、可扩充性和可升级性,提供了与office软件的接口功能:将数据文件转换成文本文件(.txt文件),Excel表格文件(.xls文件)、
4
Access数据库文件(.mdb文件),及与功能强大的分析处理软件Matlab的数据格式转换功能。
5
单自由度系统固有频率和阻尼比的测定实验 一、实验内容 1、学习分析系统自由衰减振动的波形; 2、验证固有频率的存在; 3、由衰减振动波形确定系统固有频率和阻尼比; 二、实验设备 振动与控制实验设备、位移传感器、测振仪、计算机与分析软件 三、实验原理 振动与控制实验设备如右上方图所示,单自由度系统的力学模型如右下方图所示。当给质量M 一定初始扰动时,系统作自由衰减振动,其运动微分方程为: 020222 22=++=++x dt dx n dt x d Kx dt dx C dt x d M ω和 或 022 22=++x dt dx dt x d ωξω (1) 式中,为阻尼比。 为阻尼系数,为系统固有频率,ωξω/2//n M C n M K ===
) 3(1-2)sin(,1对于小阻尼情形2 2211001ξωωωω??ωξ-==---+=<-n A t Ae x m 并且有: 衰减振动圆频率。 初相位, 系统初始振幅, 式中) (其方程有解如下: 设t=0 时,系统的位置和速度分别为x 0和v 0 , 则 ) 5()(tan ) 4()(2 002 202 22 002 0nx v n x n nx v x A +-= -++ =ω?ω 其衰减振动有如下特点: 1、振动周期 大于无阻尼时的自由振动周期,即T 1>T 2 ) 7(111) 6(112222 102 2 2 21 1ξξ ξ ωπ ωπ ωπ -= = -= -= -= = T T f T n T 系统固有频率为: 2、振幅按指数函数衰减,设相邻两次振动的振幅分别为A i 和A i+1,则减幅系数为: ω ξπωδηδηηηδηn T n M n C T n nT e A A j nT e A A nT i i j nT i i =+== = ==== ==== ++,)2(,2,j 11j ln 10,) 9(ln )8(212j 1 j j j j j 11 1 1 则: ) ()(则 振幅之比设为个周期的两次振动,其另外,相隔对数减幅系数
汽车悬挂系统结构原理图解 Post by:2010-10-419:48:00 什么是悬挂系统 舒适性是轿车最重要的使用性能之一。舒适性与车身的固有振动特性有关,而车身的固有振动特性又与悬架的特性相关。所以,汽车悬架是保证乘坐舒适性的重要部件。同时,汽车悬架做为车架(或车身)与车轴(或车轮)之间作连接的传力机件,又是保证汽车行驶安全的重要部件。因此,汽车悬架往往列为重要部件编入轿车的技术规格表,作为衡量轿车质量的指标之一。 汽车车架(或车身)若直接安装于车桥(或车轮)上,由于道路不平,由于地面冲击使货物和人会感到十分不舒服,这是因为没有悬架装置的原因。汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。它的作用是弹性地连接车桥和车架(或车身),缓和行驶中车辆受到的冲击力。保证货物完好和人员舒适;衰减由于弹性系统引进的振动,使汽车行驶中保持稳定的姿势,改善操纵稳定性;同时悬架系统承担着传递垂直反力,纵向反力(牵引力和制动力)和侧向反力以及这些力所造成的力矩作用到车架(或车身)上,以保证汽车行驶平顺;并且当车轮相对车架跳动时,特别在转向时,车轮运动轨迹要符合一定的要求,因此悬架还起使车轮按一定轨迹相对车身跳动的导向作用。 悬架结构形式和性能参数的选择合理与否,直接对汽车行驶平顺性、操纵稳定性和舒适性有很大的影响。由此可见悬架系统在现代汽车上是重要的总成之一。
一般悬架由弹性元件、导向机构、减振器和横向稳定杆组成。弹性元件用来承受并传递垂直载荷,缓和由于路面不平引起的对车身的冲击。弹性元件种类包括钢板弹簧、螺旋弹簧、扭杆弹簧、油气弹簧、空气弹簧和橡胶弹簧。减振器用来衰减由于弹性系统引起的振动,减振器的类型有筒式减振器,阻力可调式新式减振器,充气式减振器。导向机构用来传递车轮与车身间的力和力矩,同时保持车轮按一定运动轨迹相对车身跳动,通常导向机构由控制摆臂式杆件组成。种类有单杆式或多连杆式的。钢板弹簧作为弹性元件时,可不另设导向机构,它本身兼起导向作用。有些轿车和客车上,为防止车身在转向等情况下发生过大的横向倾斜,在悬架系统中加设横向稳定杆,目的是提高横向刚度,使汽车具有不足转向特性,改善汽车的操纵稳定性和行驶平顺性。 悬挂系统的分类 现代汽车悬架的发展十分快,不断出现,崭新的悬架装置。按控制形式不同分为被动式悬架和主动式悬架。目前多数汽车上都采用被动悬架,如下图所示,也就是汽车姿态(状态)只能被动地取决于路面及行驶状况和汽车的弹性元件,导向机构以及减振器这些机械零件。20世纪80年代以来主动悬架开始在一部分汽车上应用,并且目前还在进一步研究和开发中。主动悬架可以能动地控制垂直振动及其车 身姿态,根据路面和行驶工况自动调整悬架刚度和阻尼。
第22卷第6期2000年12月 武汉汽车工业大学学报 JOURNA L OF W UH AN AUT OM OTI VE PO LY TECH NIC UNI VERSITY V ol.22N o.6 Dec.2000 文章编号:10072144X(20000620022204 汽车减振器阻尼系数与悬架系统阻尼比的匹配 韦勇1,阳杰2,容一鸣2 (1.柳州五菱汽车有限责任公司技术中心,广西柳州545007;2.武汉汽车工业大学机电工程学院,湖北武汉430070 摘要:阐述了双轴汽车减振器阻尼系数与悬架系统阻尼比匹配设计的原则,论述了悬架减振器 外特性的匹配设计要求和设计方法,并对某实际车型进行了减振器阻尼系数与悬架系统阻尼比匹 配分析及改进设计。通过道路试验验证了改进设计的结果是可行的。 关键词:减振器;汽车悬架;阻尼比匹配 中图法分类号:U463.33文献标识码:A 汽车悬架动力学表明,地面对悬架系统的激振力等于悬架质量的惯性力和非悬架质量的惯性力之和。车轮动载(激振力又决定了车轮的接地性能,它是汽车行驶安全性的重要尺度。显然,在悬架系统中配置恰当的减振器,才能有效地抑制车身振动,保证良好的平顺性及安全性。
1阻尼匹配的原则 根据振动理论和工程经验,悬架阻尼的匹配关系由式(1确定: ξ=C 2Km =0.2~0.45(1式中,ξ为悬架系统阻尼比;C为悬架减振器的等效阻尼系数 (NsΠm;K为悬架刚度(NΠm; m为悬架质量(kg。当减振器不是垂直安装时,要考虑安装角的影响。 悬架中的弹性元件在支承车身质量的同时,还可缓和路面产生的振动,而减振器起抑制振动的作用。缓冲和抑振是矛盾着的两个方面,它们是在保证车辆和乘员安全的正常运行条件下统一起来的,这就是悬架阻尼必须匹配设计的依据。ξ值较大时,能迅速减振,但不适当地增大ξ值会传递较大的路面冲击,甚至使车轮不能迅速向地面回弹而失去附着力和对激励的缓冲能力;ξ值较小时,振动持续时间变长,又不利于改善舒适性。 一般说来,压缩行程时的悬架阻尼比要小于复原行程,因为在压缩行程,应尽量减小减振器对地面冲击的传递能力,以便充分利用弹性元件的缓冲作用,如果不适当地选择了高系数值,就相当于过分增大了悬架刚度,使车辆的平顺性变坏。在确定了ξ值之后,可由式(1确定减振器的阻尼系数。因此,确定ξ值是减振器设计的原始技术条件。 收稿日期:2000209218. 作者简介:韦勇(19672,男,广西柳州人,柳州五菱汽车有限责任公司工程师. 2悬架减振器非线性外特性的规律化和量化问题 众所周知,被动悬架可行性设计区理论规定了悬架弹性元件和阻尼元件的线性制约关系或匹配关系[1]。在解决悬架阻尼系数的匹配问题时,必须解
说明:在下面的数据处理中,如1 A,11d T,1δ,1ξ,1n T,1nω:表示第一次实 1 验中第一、幅值、对应幅值时间、变化率、阻尼比、无阻尼固有频率。第二 次和和三次就是把对应的1改成2或3.由于在编缉公式时不注意2,3与平 方,三次方会引起误会,请老师见谅!! Ap0308104 陈2006-7-1 实验题目:悬臂梁一阶固有频率及阻尼系数测试 一、实验要求以下: 1. 用振动测试的方法,识别一阻尼结构的(悬臂梁)一阶固有频率和阻尼系数; 2. 了解小阻尼结构的衰减自由振动形态; 3. 选择传感器,设计测试方案和数据处理方案,测出悬臂梁的一阶固有频率和阻尼 根据测试曲线,读取数据,识别悬臂梁的一阶固有频率和阻尼系数。 二、实验内容 识别悬臂梁的二阶固有频率和阻尼系数。 三、测试原理概述: 1,瞬态信号可以用三种方式产生,有脉冲激振,阶跃激振,快速正弦扫描激振。 2,脉冲激励用脉冲锤敲击试件,产生近似于半正弦的脉冲信号。信号的有效频率取决于脉冲持续时间τ,τ越小则频率范围越大。 3.幅值:幅值是振动强度的标志,它可以用峰值、有效值、平均值等方法来表示。 频率:不同的频率成分反映系统内不同的振源。通过频谱分析可以确定主要频率成分及其幅值大小,可以看到共振时的频率,也就可以得到悬臂梁的固有频率 4、阻尼比的测定 自由衰减法: 在结构被激起自由振动时,由于存在阻尼,其振幅呈指数衰减波形,可算出阻尼比。一阶固有频率和阻尼比的理论计算如下:
11 3 3 44 4 2 3.515(1) 2=210 ;70;4;285;7800 ; ,12 12 ,, Ix = 11.43 c m Iy= 0.04 c m 0.004 2.810,,1x y y f k g E p a b m m h m m L m m m a b a b I I I m m E L π ρρ-----------?===== = ?=?固x y = 式惯性矩:把数据代入I 后求得 载面积:S =b h =0.07m 把S 和I 及等数据代入()式, 求得本41.65() H Z 固理悬臂梁理论固有频率f = 阻尼比计算如下: 2 2 2 1 111 220, 2,........ln , ,22;n d n n n d n d n T i i i j j i i i i j i i i j i n d i j n d n d d d d x d x c k x d t d t c e A A A A A T A T T ξωξωωξωωωξωωηη δξωωωωωπδπξ++ -++ +++ + ++=++===≈== ? ?? ==≈2 二阶系统的特征方程为S 微分方程:m 当很少时,可以把。A 减幅系数=而A A A A A 1则:= j 又因为所以==,所以=即可知δξπ = 2 在这个实验中,我们使用的是自由衰减法,以下是实验应该得到的曲线样本及物理模型。
钢板弹簧悬架系统设计规范 1范围 本规范适用于传统结构的非独立悬架系统,主要针对钢板弹簧和液力筒式减振器等主要部件设计参 数的选取、计算、验证等作出较详细的工作模板。 2规范性引用文件 下列文件中的条款通过本规范的引用而成为本规范的条款。凡是注日期的引用文件,其随后所有的 修改单(不包括勘误的内容)或修订版均不适用于本规范,然而,鼓励根据本规范达成协议的各方研究 是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本规范。 QC/T 491-1999汽车筒式减振器尺寸系列及技术条件 QCn 29035-1991汽车钢板弹簧技术条件 QC/T 517-1999汽车钢板弹簧用U形螺栓及螺母技术条件 GB/T 4783-1984汽车悬挂系统的固有频率和阻尼比测定方法 3符号、代号、术语及其定义 GB 3730.1-2001 汽车和挂车类型的术语和定义 GB/T 3730.2-1996 道路车辆质量词汇和代码 GB/T 3730.3-1992 汽车和挂车的术语及其定义车辆尺寸 QC/T 491-1999汽车筒式减振器尺寸系列及技术条件 GB/T 12549-2013汽车操纵稳定性术语及其定义 GB 7258-2017机动车运行安全技术条件 GB 13094-2017 客车结构安全要求 QC/T 480-1999汽车操纵稳定性指标限值与评价方法 QC/T 474-2011客车平顺性评价指标及限值 GB/T 12428-2005客车装载质量计算方法 GB 1589-2016道路车辆外廓尺寸、轴荷及质量限值 GB/T 918.1-1989 道路车辆分类与代码机动车 JTT 325-2013营运客车类型划分及等级评定 凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本规范,凡是不注日期的引用文件,其最新版本适用于本规范。 4悬架系统设计对整车性能的影响 悬架是构成汽车的总成之一,一般由弹性元件(弹簧)、导向机构(杆系或钢板弹簧)、减振装置 (减振器)等组成,把车架(或车身)与车桥(或车轮)弹性地连接起来。主要任务是传递作用在车轮与车架之间的一切力与力矩,缓和由不平路面传给车架的冲击载荷,衰减由冲击载荷引起的承载系统的 振动,保证汽车的正常行驶。悬架结构、性能不仅影响汽车的行驶平顺性,还对操纵稳定性、燃油经济性、通过性等多种
关于汽车悬架系统 ——简单知识了解 李良 车辆工程 说明: 1、单独的关于悬架的资料太多,将资料简化,尽可能简单些,写的不好,多多批评指正。第二部分对悬架的设计和选型很有参考价值,可以看看。 2、另外搜集了一些关于悬架方面的资料(太多了,提供部分),也很不错。 3、有什么问题或建议多多提,我喜欢~~~~~~~~ 第一部分简单回答您提出的问题 悬架的作用: 1、连接车体和车轮,并用适度的刚性支撑车轮; 2、吸收来自路面的冲击,提高乘坐舒适性; 3、有助于行驶中车体的稳定,提高操作性能; 悬架系统设计应满足的性能要点: 1、保证汽车有良好的行驶平顺性;相关联因素有:振动频率、振动加速度界限值 2、有合适的减振性能;应与悬架的弹性特性很好地匹配,保证车身和车轮在共振区的振幅小,振动衰减快 3、保证汽车具有良好的操纵稳定性;主要为悬架导向机构与车轮运动的协调,一方面悬架要保证车轮跳动时,车轮定位参数不发生很大的变化,另一方面要减小车轮的动载荷和车轮跳动量 4、汽车制动和加速时能保持车身稳定,减少车身纵倾(点头、后仰)的可能性,保证车身在制动、转弯、加速时稳定,减小车身的俯仰和侧倾 5、能可靠地传递车身与车轮之间的一切力和力矩,零部件质量轻并有足够的强度、刚度和寿命 悬架的主要性能参数的确定: 1、前、后悬架静挠度和动挠度; 2、悬架的弹性特性; 3、(货车)后悬架主、副簧刚度的分配; 4、车身侧倾中心高度与悬架侧倾角刚度及其在前、后轴的分配; 5、前轮定位参数的变化与导向机构结构尺寸的选择; 悬架系统与转向系统: 1、悬架机构位移的转向效应,悬架系对操纵性、稳定性的影响之一是悬架机构的位移随弹簧扰度而变所引起的转向效应。轴转向,使用纵置钢板弹簧的车轴式悬架的汽车在转弯时车体所发生侧摆的情况下,转弯外侧车轮由于弹簧被压缩而后退,内侧车轮由于弹簧拉伸而前进,其结果是整个车轴相当原来的车轴中心产生转角,这种现象称为周转向。前轮产生转向不足的效应,后轮产生转向过度的效应。独立悬架外侧成为前束(负前束),而产生轴转向效应。 2、车轮外倾角变化的转向效应,大多数独立悬架的车轮对面外倾角以及轮胎接地负荷都随着车体的倾斜而变化,这时外倾推力也发生变化,车轮被推向转弯的外侧,前轮有转向不足,后轮有转向过度的倾向。在这种情况下,其作用和离心对抗,所以产生相反效应。车轴式悬架在转弯时由于左右的负荷移动,轮胎的扰度不同也产生若干的外倾角的变化,其作用相同。 3、上述都是转弯时的情况,而直进时由于路面凹凸不平使车轮上下振动,也同时会产生这种效应,随着外倾角的变化也有产生轴转向的可能性。一般轴转向或因外倾角变化的转向效应都会改变原来的操纵特性,所以对操纵性,稳定性影响相当大,因此,在设计汽车时往往把这些效应计算在内面修正其操纵特性。
实验三振动系统固有频率的测量 一、实验目的 1、了解和熟悉共振前后利萨如图形的变化规律和特点; 2、学习用“共振法”测试机械振动系统的固有频率(幅值判别法和相位判别法); 3、学习用“锤击法”测试机械振动系统的固有频率(传函判别法); 4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率(自谱分析法)。 二、实验装置框图 实验装置3-1图框图三、实验原理对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。 另一种方法是锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率。以下对这两种方法加以说明:1、简谐力激振简谐力作用下的强迫振动,其运动方程为:XX?方程式的解由这两部分组成:21CC、常数由初始条件决定:式中21其中 ??22????q2?q F ee?A?A0???q?? , 212222222222????????4??4?? ,m eeee
XX代表阻尼强迫振动项。代表阻尼自由振动基,21?2?T自由振动周期:D?D. ?2?T强迫振动项周期:e?e由于阻尼的存在,自由振动基随时间不断得衰减消失。最后,只剩下后两项,也就是通常讲的定常强动,即强迫振动部分:通过变换可写成2?/q22?AA?A? 式中21222???42ee?(1?)42?????e Dw??,代入公式设频率比?2?/q?A则振幅 2222??D?1?4)(?D2?g?arct滞后相位角:2??1FFK2?00xstq/???/:成幅A可写的静位移,所以振起干为弹簧受扰力峰因为值作用引Kmm1?xx?.A? stst2222??D4)??(11???其中称为动力放大系数:222??D?)(1?42动力放大系数β是强迫振动时的动力系数即动幅值与静幅值之比。这个数值对拾振器和单自由度体系的振动的研究都是很重要的。 ??1,即强迫振动频率和系统固有频率相等时,动力系数迅速增加,引起系统共振,由式:当?)?A?sin(wtX e可知,共振时振幅和相位都有明显变化,通过对这两个参数进行测量,我们可以判别系统是否达到共振动点,从而确定出系统的各阶振动频率。 (一)幅值判别法 在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过示波器,我们可以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有频率。这种方法简单易行,但在阻尼较大的情况下,不同的测量方法的出的共振动频率稍有差别,不同类型的振动量对振幅变化敏感程度不一样,这样对于一种类型的传感器在某阶频率时不够敏感。 (二)相位判别法 相位判别是根据共振时特殊的相位值以及共振前后相位变化规律所提出来的一种共振判别法。在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法,而且共振是的频率就是系统的无阻尼固有频率,可以排除阻尼因素的影响。 ?tFF?sin激振信号为: ??)Y sin(?ty?位移信号为:? ) ωt-=ωYcos(y速度信号为:2? ) ωt-=-ωsin(y加速度信号为:(三)位移判别法 将激振动信号输入到采集仪的第一通道(即x轴),位移传感器输出信号或通过ZJT-601A型振动教学仪积分档输出量为位移的信号输入第二通道(即y轴),此时两通道的信号分别为: F=Fsinωt 激振信号为:?) t-y=Y sin(ω位移信号为:?=π/2,πω=ω/2,根据利萨如图原理可知,y轴 信号的相位差为x,共振时,轴信号和nωω时,图象都将由正椭圆变为斜椭圆,其变化过屏幕上的图象将是一个正椭圆。当或略小于ω略大于nn程如下图所示。因此图象由斜椭圆变为正椭圆的频率就是振动体的固有频率。 ω<ωω=ωω>ωn n n 图3-2 用位移判别法共振的利萨如图形 (四)速度判别共振
图1 衰减振动波形、对经过半周期为基准的阻尼计算每经过半周期的振幅的比值为一常量,2121)2(1D D TD TD t t K K e e Ae Ae A A -+--+====πεεε?这个比例系数 表示阻尼振动的振幅(最大位移)按几何级数递减。衰减系数 常用来表示 ??振幅的减小速率。如果用衰减系数的自然对数来表示振幅的衰减则更加方便。?、管通过管线敷设技术,不仅可以解决吊顶层配置不规范问题,而且可保障各类管路习题到位。在管路敷设过程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标高等,要求技术交底。管线敷设技术中包含、电气课件中对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高中资料试卷要求,对电气设备进行空载与带负荷下高中资料试卷调控试验;对设备进行调整使其在正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设备高中资料试卷试、电气设备调试高中资料电力保护装置调试技术,电力保护高中资料试卷配置技术是指机组在进行继电保护高中资料试卷总体配置时,需要在最大限度内来确保机组高中资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护装置动作,并且拒
砝码为3kg 的图像 砝码为 3.5kg的图像、管路敷设技术通过管线敷设技术,不仅可以解决吊顶层配置不规范问题,而且可保障各类管路习题到位。在管路敷设过程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标高等,要求技术交底。管线敷设技术中包含线槽、管架等多项方式,为解决高中语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内,强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。、电气课件中调试对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高中资料试卷要求,对电气设备进行空载与带负荷下高中资料试卷调控试验;对设备进行调整使其在正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设备高中资料试卷试验方案以及系统启动方案;对整套启动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现场设备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。、电气设备调试高中资料试卷技术电力保护装置调试技术,电力保护高中资料试卷配置技术是指机组在进行继电保护高中资料试卷总体配置时,需要在最大限度内来确保机组高中资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护装置动作,并且拒绝动作,来避免不必要高中资料试卷突然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装置。
一.名词解释 1、汽车使用性能:汽车能够适用各种使用条件,以最高效率、最低消耗、安全可靠地完成运输工作的能力。 2、滚动阻力系数:车轮在等速平路行驶时滚动时所需之推力与车轮负荷之比。 3、滑移率:在车轮运动中滑动成分所占的比例。 4、制动器制动力:在轮胎周缘克服制动器摩擦力矩所需的力。 5、侧向力系数: 6、稳态横摆角速度增益:稳态横摆角速度与前轮转角之比。 7、汽车的动力因数:是剩余牵引力(总牵引力减空气阻力)和汽车总重之比: 8、附着椭圆:驱动力或制动力在不同侧偏角条件下的曲线包络线接近于椭圆,称为附着椭圆。 9、汽车前或后轮(总)侧偏角:包括1)考虑到垂直载荷与外倾角变动等因素的弹性侧偏角;2)侧倾转向角;3)变形转向角。 10、回正力矩:是使转向车轮恢复到直线行驶的主要恢复力矩之一,它是由接地面内分布的微元侧反向力产生的。 11侧偏力和轮胎的侧偏现象:侧偏力:汽车在行驶过程中,由于路面的侧向倾斜、侧向风或曲线行驶时的离心力等的 作用,车轮中心沿轮胎坐标系Y轴方向有侧向力FY,相应地在地面上产生地面侧向反作 用力FY,FY即侧偏力。侧偏现象:当车轮有侧向弹性时,即使地面侧向反作用力FY 没有达到附着极限,车轮行驶方向也将偏离车轮平面cc,这就是轮胎的侧偏现象。 12轮胎坐标系:为了讨论轮胎的力学特性,需要建立一个轮胎坐标系。规定如下:垂直车轮旋转轴线的轮胎中分平面称为车轮平面。坐标系的原点O 为车轮平面和地平面的交线与车轮旋转轴线在地平面上投影线的交点。车轮平面与地平面的交线取为X 轴,规定向前为正。Z 轴与地面垂直,规定指向上方为正。Y 轴在地面上,规定面向车轮前进方向时,指向左方为正。 13.侧倾转向:在侧向力作用下车厢发生侧倾,由车厢侧倾所引起的前转向轮绕主销的转动,后轮绕垂直地面轴线的转动,即车轮转向角的变动,称为侧倾转向 14.悬架的侧倾角刚度:指侧倾时(车轮保持在地面上),单位车厢转角下,悬架系统给车厢的总弹性恢复力偶矩。T 为悬架系统作用于车厢的总弹性恢复力偶矩;φr为车厢转角。可以通过悬架的线刚度或等效弹簧来计算悬架的侧倾角刚度。 15.横摆角速度频率响应特性:在分析汽车的操纵稳定性时,常以前轮转角δ或转向盘转角δsw为输入,汽车横摆角速度ωr为输出,来表征汽车的动特性。横摆角速度频率响应特性包括幅频特性和相频特性。 16.悬挂质量分配系数:y为车身绕横轴y 的回转半径,a、b 为车身质量至前、后轴的距离。大部分汽车ε=0.8~1.2 . 17.侧偏刚度k:FY ?α曲线在α=0°处的斜率称为侧偏刚度k,单位为N/rad . FY =kα . 18.高宽比:以百分数表示的轮胎断面高H与轮胎断面宽B 之比100% HB×叫高宽比,又叫扁平率。 19.滑水现象:在一定车速下,汽车经过有积水层的路面时,轮胎将完全漂浮在水膜上面而与路面毫不接触,滑动附着系数?s ≈0,侧偏力完全丧失,方向盘和刹车会完全不起作用是一种极度危险的状态。此即滑水现象。 20汽车的操纵稳定性:指驾驶员在不感到过分紧张、疲劳的条件下,汽车能遵循驾驶员通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
毕业设计(论文) 文献综述 题目十九座客车悬架系统设计 专业车辆工程(汽车工程) 班级08级2班 学生 指导教师 2012 年
汽车悬架系统文献综述 1.前言 悬架是安装在车桥和车轮之间用来吸收汽车在高低不平的路面上行驶所产生的颠簸力的装置。因此,汽车悬架系统对汽车的操作稳定性、乘坐舒适性都有很大的影响。由于悬架系统的结构在不断改进,其性能及控制技术也得到了迅速提高。尽管一百多年来汽车悬架从结构形式到作用原理一直在不断地演进,但从结构功能而言,它都是由弹性元件、减振装置和导向机构三部分组成。在有些情况下,某一零部件兼起两种或三种作用,比如钢板弹簧兼起弹性元件和导向机构的作用,麦克弗逊悬架中的减振器柱兼起减振器及部分导向机构的作用,有些主动悬架中的作动器则具有弹性元件、减振器和部分导向机构的功能。其作用是传递路面作用在车轮和车架上的支承力、牵引力、制动力和侧向反力以及这些力所产生的力矩,并且缓冲和吸收由不平路面通过车轮传给车架或车身的振动与冲击,抑制车轮的不规则振动,提高车辆平顺性(乘坐舒适性)和安全性(操纵稳定性),减少动载荷引起的零部件和货物损坏[1]。 2.汽车悬架系统的发展状况 非独立悬架早期广泛应用于轿车及轿车以外的其它车型中,由于其可靠性和简单的特性,现在还被广泛的用于轿车的后桥,轻型货车和越野汽车的后桥,重型货车的前后桥都采用非独立悬架。 独立悬架早期只单纯用于轿车上,目前大部分轻型货车和越野汽车为了提高舒适性也开始采用独立悬架,同时一些中型卡车及客车为了提高驾乘的舒适性和行驶平顺性也开始采用独立悬架,在国外甚至一些轮式工程机械如吊车和重型卡车也开始采用独立悬架。因此对于独立悬架的设计技术,国内外都进行了研究,这些研究主要集中在以下几个方面:独立悬架设计方法,独立悬架参数对汽车行驶平顺性的影响;独立悬架对汽车操纵稳定性的影响。国内的研究主要表现为:独立悬架和转向系的匹配;独立悬架与转向横拉杆长度和断开点的确定;悬架弹性元件的设计分析;导向机构的运动分析;独立悬架对前轮定位参数的影响;独立悬架的优化设计等。国外除上述研究外,还进入了微观领域的研究,如用原子力学显微镜观察悬架材料内部聚合体的原子转化情况,研究悬架作为弹性介质的流变特性[2]等,从而使得独立悬架向着智能化、轻量化、小型化、通用化方向发
实验报告1:自由衰减法测量单自由度系统的固有频率和阻尼比 姓名:刘博恒学号:1252227专业:车辆工程(汽车) 班级:12级 日期:2014年12月25日组内成员张天河、刘嘉锐、刘博恒、马力、孙贤超、唐鑫 一、实验目的 1.了解单自由度自由衰减振动的有关概念。 2.学会用数据采集仪记录单自由度系统自由衰减振动的波形。 3.学会根据自由衰减振动波形确定系统的固有频率和阻尼比。 二、实验原理 由振动理论可知,一个单自由度质量-弹簧-阻尼系统,其质量为m(kg),弹簧刚度为K(N m ?),粘性阻尼系数为r(N?m s?)。当质量上承受初始条件(t=0时,位移x=x0,速度x?=x?0)激扰时,将作自由衰减振动。 在弱阻尼条件下其位移响应为: x=Ae?nt sin(√p2?n2t+φ) 式中: n=r 2m 为衰减系数(rad/s) p=√K m 为固有圆频率(rad/s) A=√x?02+2nx?0x0+p2x02 p2?n2 为响应幅值(m) φ=tan?1x0√p2?n2 x?0+nx0 为响应的相位角(rad) 引入: 阻尼比ξ=n p 对数衰减比δ=ln A1 A3 则有:n=δ T d 而T d=1 f d = √p2?n2 f d=p d 2π =√p2?n2 2π 为衰减振动的频率,p d= √p2?n2为衰减振动的圆频率。 在计算对数衰减比时,考虑到传感器的误差及系统本身迟滞,振动的平衡点位置可能不为0,因此可以使用相邻周期的峰峰值来代替振幅值计算,即δ=ln A1+A2 A3+A4 。 从衰减振动的响应曲线上可直接测量出δ、T d,然后根据n=δ T d 可计算出n;T d=1 f d = √p22计算出p;ξ=n p 可计算出ξ;n=r 2m 计算出r;f0=p 2π =1 2π √K m 计算出无阻尼时系统的 固有频率f0;T0=1 f =2π?√m K 计算出无阻尼时系统的固有周期T0。 三、实验方法 1)将系统安装成单自由度无阻尼系统,在质量块的侧臂有一个“测量平面”,用于电涡流传感器拾振。将电涡流传感器对准该平面,调节其初始位置,使得位移测量仪在ORIG 位置时限制值在1.00mm至1.5mm范围内。 2)在软件中选中“单自由度系统-用自由衰减法测量系统参数”项目,软件左侧的采集设置默认即可。打开一个时间波形观察图,设置均为默认无需修改。设置完毕后开始采集。 3)用手轻推质量块,或者用力锤轻敲质量块,采集一段信号进行分析。让质量块自由衰减时所给的力应对准质量块中心位置,否则波形可能畸变。 4)利用光标读出多个周期的时间、振幅坐标并记录,计算其对数衰减比和周期的平均值,进而计算出固有频率、阻尼比。 5)将系统安装成单自由度有阻尼系统,重复上述步骤。
附录Ⅰ:外文资料 Automotive Suspension System Overview The impact of the Vehicle in many aspects, Suspension plays a very important role . The components of the suspension system perform six basic functions: 1.Maintain correct vehicle ride height. 2.Reduce the effect of shock forces. 3.Maintain correct wheel alignment. 4.Support vehicle weight. 5.Keep the tires in contact with the road. 6.Control the vehicle’s direction of travel. Most suspension systems have the same basic parts and operate basically in the same way. They differ, however, in the way the parts are arranged. The vehicle wheel is attached to a steering knuckle. The steering knuckle is attached to the vehicle frame by two control arms, which are mounted so they can pivot up and down. A coil spring is mounted between the lower control arm and the frame. When the wheel rolls over a bump, the control arms move up and compress the spring. When the wheel rolls into a dip, the control arms move down and the springs expand. The spring force brings the control arms and the wheel back into the normal position as soon as the wheel is on flat pavement. The idea is to allow the wheel to move up and down while the frame, body, and passengers stay smooth and level. The unequal length control arm or short, long arm (SLA) suspension system has been common on American vehicles for many years. Because each wheel is independently connected to the frame by a steering knuckle, ball joint assemblies, and upper and lower control arms, the system is often described as an independent suspension. The short, long arm suspension system gets its name from the use of two control arms from the frame to the steering knuckle and wheel assembly. The two control arms are of unequal length with a long control arm on the bottom and a short control arm on the top. The control arms are sometimes called A arms because in the top view they are shaped like the letter A. In the short, long arm suspension system, the upper control arm is attached to a cross shaft through two combination rubber and metal bushings. The cross shaft, in turn, is bolted to the frame. A ball joint, called the upper ball joint, is attached to the outer end of the upper arm and connects to the steering knuckle through a tapered stud held in position with a nut. The inner ends of the lower control arm have pressed-in
长城汽车悬架系统 目录 一、悬架系统基础知识 二、弹性元件 三、减振器 四、导向装置及套筒 五、横向稳定杆 六、常见故障 一、悬架系统基础知识 悬架系统概述:舒适性是乘用车最重要的使用性能之一。舒适性与车身的固有振动特性有关,而车身的固有振动特性又与悬架的特性相关。所以,汽车悬架是保证乘坐舒适性的重要部件。同时,汽车悬架做为车架 ( 或车身 ) 与车轴 ( 或车轮 ) 之间作连接的传力机件,又是保证汽车行驶安全的重要部件。由于人体所习惯的垂直振动频率约为1~1.6Hz, 所以车身振动的固有频率应接近或处于人体所适应的范围。 悬架的功用:1、连接车桥和车架(车身); 2、传递各种力和力矩; 3、缓冲、减振、导 向及稳定。 悬架的结构组成: 弹性元件:承受垂直载荷,缓和冲击; 减振器:减振; 导向装置:传力、导向; 横向稳定器:辅助弹性元件,以防横向倾斜。
悬架的分类: 1.主动式悬架与被动式悬架:目前多数汽车上都采用被动悬架,也就是汽车姿态 (状态)只能被动地取决于路面及行驶状况和汽车的弹性元件,导向机构以及减振器这些机械零件。主动悬架可以自动地控制垂直振动及其车身姿态,根据路面和行驶工况自动调整悬架刚度和阻尼。采用主动式悬架后,汽车对侧倾、俯仰、横摆跳动和车身的控制都能更加迅速、精确,汽车高速行驶和转弯的稳定性提高,车身侧倾减少。制动时车身前俯小,启动和急加速可减少后仰。 即使在坏路面,车身的跳动也较少,轮胎对地面的附着力提高。 1) 主动式液压悬架:电子控制的主动式液压悬架能根据悬架的质量和加速度 等,利用液压部件主动地控制汽车的振动。主动式液压悬架在汽车重心附近安装有纵向、横向加速度和横摆陀螺仪传感器,用来采集车身振动、车轮跳动、车身高度和倾斜状态等信号,这些信号被输入到控制单元ECU,ECU根据输入信号和预先设定的程序发出控制指令,控制伺服电机并操纵前后四个执行油缸 工作。 2) 主动式空气悬架:在电子控制的主动式空气悬架系统中,微机根据传感器送 来的信号和驾驶员给予的控制模式经过运算分析后向悬架发出指令,悬架可以根据微机给出的指令改变悬架的刚度和阻尼系数,使车身在行驶过程中保持良好的稳定性能,并且将车身的振动响应控制在允许的范围内。一般说来,主动式空气悬架的控制内容包括车身高度、减振器衰减力、弹簧弹性系数等三项。 2.非独立悬架与独立悬架:非独立悬架特点是两侧车轮安装于一整体式车桥上,
实验三振动系统固有频率的测量 、实验目的 1、了解和熟悉共振前后利萨如图形的变化规律和特点; 2、学习用“共振法”测试机械振动系统的固有频率(幅值判别法和相位判别法) 3、学习用“锤击法”测试机械振动系统的固有频率(传函判别法); 4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率(自谱分析法)、实验装置框图
图3-1实验装置框图 三、实验原理 对于振动系统,经常要测定其固有频率, 最常用的方法就是用简谐力激振, 引起系统共 振,从而找到系统的各阶固有频率。 另一种方法是锤击法,用冲击力激振, 通过输入的力信 号和输出的响应信号进行传函分析,得到各阶固有频率。以下对这两种方法加以说明: 1、简谐力激振 简谐力作用下的强迫振动,其运动方程为: mx Cx Kx = F o sin e t 方程式的解由X ! X 2这两部分组成: X^^t (C 1 cosw D t C 2 si nw D t) 式中C 1、C 2常数由初始条件决定: 的定常强动,即强迫振动部分: x 2 cos e t 7^ s in 'e t 2 4 2 r ;2』 通过变换可写成 其中 X 2 A cosw e t A sinw e t A = E _讯$十4名2coj 【2 2q e ; F 0 q - m X 1 代表阻尼自由振动基, x 2代表阻尼强迫振动项。 自由振动周期: T D 强迫振动项周期: T e ■D 2 二 ■e 由于阻尼的存在, 自由振动基随时间不断得衰减消失。最后, 只剩下后两项, 也就是通常讲 2q e
X = Asin (w e t - :) q/ ‘2 2 ,22 (1 -笃II CO o 2? ~2 2 皎—叽丿 滞后相位角: 二a r ct j D ; 1— y 2 F K F 因为q/ 「计齐若xst 为弹簧受干扰力峰值作用引起的静位移,所以振幅 其中[称为动力放大系数: 「 ------------ 1 — (1」2)2+442D 2 动力放大系数3是强迫振动时的动力系数即动幅值与静幅值之比。 这个数值对拾振器和 单自由度体系的振动的研究都是很重要的。 当- 1 ,即强迫振动频率和系统固有频率相等时, 动力系数迅速增加,引起系统共振, 由式: X = Asi n (W e t -】) 可知,共振时振幅和相位都有明显变化, 通过对这两个参数进行测量, 我们可以判别系统是 否达到共振动点,从而确定出系统的各阶振动频率。 (一) 幅值判别法 在激振功率输出不变的情况下, 由低到高调节激振器的激振频率, 通过示波器,我们可 以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振 动系统的某阶固有频率。这种方法简单易行,但在阻尼较大的情况下,不同的测量方法的出 的共振动频率稍有差别,不同类型的振动量对振幅变化敏感程度不一样, 这样对于一种类型 的传感器在某阶频率时不够敏感。 (二) 相位判别法 相位判别是根据共振时特殊的相位值以及共振前后相位变化规律所提出来的一种共振 判别法。在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法, 而且共振是 式中 设频率比 则振幅 」=—,;=Dw 代入公式 o q/co 2 (1 _ J .2)2 - 4」 2 D 2 写成: _______ 1 _______ (1 _」2 )2 4」 2D 2 X st ?X st