手持式三维扫描仪调研报告
一、三维扫描仪特点
三维扫描技术是一种先进的全自动高精度立体扫描技术,通过测量空间物体表面点的三维坐标值,得到物体表面的点云信息,并转化为计算机可以直接处理的三维模型,又称为“实景复制技术”
三维扫描仪分为接触式扫描仪和非接触式扫描仪,手持式三维扫描仪属于非接触式扫描仪,非接触式扫描仪又分为拍照式扫描仪(光栅三维扫描仪)和激光三维扫描仪。三维照相式扫描仪,光源主要是白光,对工作环境有一定要求,不适合我公司测绘情况。本文主要介绍手持式激光三维扫描仪。
手持式激光三维扫描仪主要有以下特点:
(1)非接触测量,主动扫描光源;
(2)数据采样率高;
(3)高分辨率、高精度;
(4)数字化采集、兼容性好;
(5)可与外置数码相机、GPS系统配合使用,极大地扩展了三维激光扫描技术的使用范围。
二、三维扫描仪应用领域
三维扫描技术能够测得物体表面点的三维空间坐标,从这个意义上说,它本质上属于一种立体测量技术。与传统技术相比,它能完成复杂形体的点、型面的三维测量,实现无接触测量,具有速度快、精度高的优点。这些特性决定了它在许多领域可以发挥重要作用,而且其测量结果能直接与多种软件接口,如今己广泛应用在各个领域。具体在工业制造行业,有以下几个主要应用:
1、产品设计
三维激光扫描技术可用于各个行业的产品设计当中,包括飞机制造业、航空航天、汽车、模具制造、铸造行业、玩具制造业、制鞋业等;特别是在汽车、飞机、玩具等领域,并非所有的产品都能由CAD 设计出来,尤其是具有非标准曲面的产品,在某些情况下常采用“直觉设计(逆向设计)”,设计师直接用胶泥、石膏等做出手工模型,或者需要按工艺品的样品加工,该模型和样品一般具有复杂曲面特征。采用三维扫描仪,可对这些样品、模型进行扫描,得到其立体尺寸数据,并直接与各种CAD/CAM软件接口,完成建模、修改、优化和快速制造。同时,由于三维激光扫描仪采用非接触式技术,对易碎、易变性物体,也能实现好的测量,有利于产品的优化设计。
2、工业仿制&工业设备零配件开发
仿制是工业加工中的一项重要任务,测量其尺寸是仿制的第一
步。三维扫描仪能快速测得零件表面每个点的坐标,将数据送入CAD 系统和数控加工设备,对三维模型进行优化和制造,从而实现快速仿制的目的。
设计农业、建筑或采矿设备零配件之前,设计者必须提取零部件的尺寸。为保证良好的配合度和性能,尺寸必须准确且尽可能完整。实际上,设计师需要留意所有装配特征、原厂零件的尺寸及零件和新设计之间可能存在的不匹配。3D扫描将提供所有零件和其相对位置的密集3D测量,大大有助于设计师在开发新设计时保证正确的装配特征和尺寸。还可以在设计中集成多种设备的多次扫描结果,以便开发出适用于多种型号的零件或配件。
进行零配件测绘时,可能需要在任何环境下采集任意形状和复杂度的零件的尺寸。由于手持式三维扫描仪的便携性,可以直接在设计工作室进行采集,也可以在客户场地进行采集,如生产车间,甚至直接在现场和极不稳定的平面上。
与传统测量方法相比,使用手持式激光扫描仪测绘可帮助节约大量的时间。快速测量设计过程所需的尺寸,并随时可供设计人员使用。
三、手持式三维激光扫描仪主要厂家及设备
三维激光式扫描仪拥有很广泛的市场应用,具有光明的市场前景,因此国际、国内也有很多厂家致力于开发相关设备,抢占市场先
机。本文选择了目前国内外中具有一定市场影响力的厂家,具体如下:
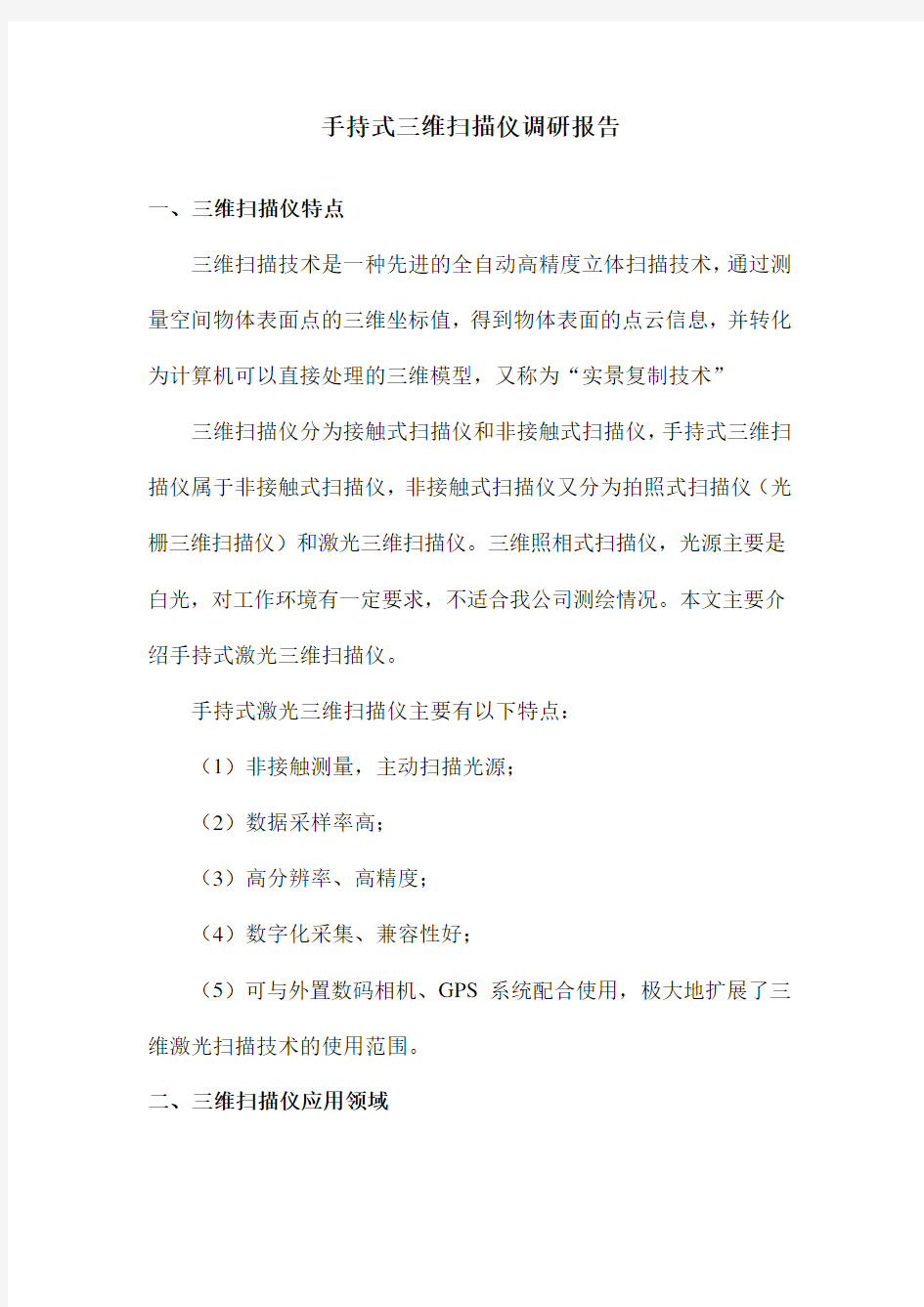
图1.型创公司产品(左为Go!Scan3D,右为HandyScan3D)型创(Creaform)公司成立于2002年,是加拿大一家从事便携式3D测量和分析技术设备的3D扫描成像的科技公司。型创研发、制造和销售3D便携式测量产品,并专业于3D工程服务。公司提供涵盖了整个3D应用的创新方案,包括三维扫描,逆向工程,质量控制,无损检测,产品研发及数字仿真。
型创公司属于手持式激光三维扫描仪的先驱,公司主营业务就是便携手持式激光三维扫描仪,公司产品主要有Go!Scan3D和HandyScan3D两种手持式激光扫描仪,目前该公司在手持式三维激光扫描仪技术与产品均在行业内处于领先地位。
图2.Z Corporation公司产品Zscanner700&800
Z Corporation是世界上速度最快三维成型机的开发商、制造商和营销商。Z Corporation致力于制造物美价廉的多功能产品,包括全球快速且高分辨率3D打印机(可通过数字数据制作彩色3D物理原型的设备)以及独特的便携式3D扫描仪(实时数字化3D表面的手持式设备)。Z Corporation的技术适用于制造业、建筑、土木工程、逆向工程、地理信息系统(GIS)、医疗及娱乐等行业的众多应用。
2009年,Z Corporation宣布推出便携式3D激光扫描仪ZScanner600,上市时售价约为64万元。ZScanner600拥有众多优点,包括仅有0.1毫米的分辨率以及高达80微米的XY轴精度;由于ZScanner600在扫描时可自行定位并以部件为参考坐标,因此,用户可在扫描过程中可随意移动目标对象而不影响扫描。
图3.国产先临三维公司产品FreeScanX3
杭州先临三维公司成立于2004年,先专注于三维数字化与3D 打印技术,将两项技术进行融合创新,提供专业三维数字技术综合解决方案,应用于工业制造、生物医疗、文化创意三大领域,帮助这些行业的客户降低产品开发制造成本,缩短产品交付周期,并有效提高产品和服务品质。公司是国内3D打印与三维数字化技术一体化应用的领军企业,中国3D打印技术产业联盟副理事长单位,浙江省3D 打印产业联盟理事长秘书长单位,光学三维测量系统(三维扫描仪)的行业标准第一起草单位。
FreeScan X3是杭州先临三维公司新一代手持式三维激光扫描仪,作为国内三维打印设备、扫描设备的先驱,FreeScan X3代表了国内最先进的三维扫描技术。
技术参数产品名称
Go!Scan3D50Handy Scan3D300Z Scanner800Free Scan X3
扫描速率550000次测量/秒205000次测量/秒25000次测量/秒240000次测量/秒扫描区域380×380mm225×250mm\230×250mm 尺寸精度0.1mm0.04mm0.04mm0.03mm 体积精度0.300mm/m0.020+0.100mm/m0.020+0.100mm/m0.020+0.100mm/m 被测部件尺寸范围0.3-3.0m0.1-4.0m\0.1-6m 产品售价¥300000¥550000¥600000¥100000
输出兼容软件
3D Systems(Geomagic?Solutions)、InnovMetric Software(PolyWorks)、Dassault Systèmes(CATIA V5和SolidWorks)、PTC(Pro/ENGINEER)、Siemens(NX 和Solid Edge)、Autodesk(Inventor、Alias、3ds Max、Maya、Softimage)表1:各厂家手持三维激光扫描仪技术规格对比表
从上表可以看出,三维激光扫描仪各厂家技术规格大同小异,目前世界上手持三维激光扫描仪扫描速率一般都超过10W次测量/秒,只有表中的Z Scanner800扫描速率为25000次测量/秒,Z Scanner800为Z Corporation公司于2009年开发的激光扫描仪,后续该公司逐渐将业务重点放到3D打印与虚拟现实(VR)技术中,未再继续开发新一代激光扫描仪,所以目前来看Z Scanner800性价比不高,不予考虑。
Free Scan X3是国内技术较成熟的三维激光扫描仪产品,从技术规格上看,其参数也不亚于国外设备,但其产品应用较少,设备使用情况未知,国产产品最大优势是价格产品低廉,售后服务迅捷。
Go!Scan3D与Handy Scan3D是型创(Creaform)公司的旗舰产品,其中Go!Scan3D是目前世界上扫描速率最快的手持式三维激光扫描仪,型创公司对此扫描仪的定位是扫描迅速但不失精度,属于该公司的入门专业级激光扫描设备。从设备的精度来讲,0.1mm完全符合煤机设备的测绘精度需求,测量尺寸范围0.3-3m对煤机设备来说也足够使用,Go!Scan3D的扫描光源为LED白光,对环境要求较高。
Handy Scan3D是型创公司的专业计量级设备,在扫描精度与范围上均比Go!Scan3D提高不少,Handy Scan3D的扫描光源为激光射线。若还需用该设备进行无损检测等其他功能,Handy Scan3D会
发挥很大优势。型创公司是目前世界上手持三维激光扫描仪技术最先进的公司,其产品技术成熟,同时使用方便,兼容性强,目前国内很多汽车厂商在进行产品逆向设计时均用该公司产品。
在零件的制造过程中,由于许多零件的外形怪异、尺寸复杂,无法用传统的方法进行测量,导致测绘图纸困难重重。神东设备维修中心一厂修复车间三坐标测量人员通过3D扫描仪逆向绘出各零部件的图纸,解决了许多零部件制造难题。
综上所述,手持式三维激光扫描仪有以下优势:
(1)扫描速率快、精度高,有效减少测绘时间;
(2)非常适合扫描曲面铸件、锻件,降低测绘难度;
(3)直接三维模型输出,适应现在设计模式;
现在使用三维设计软件Siemens NX UG进行产品设计越来越普遍,三维激光扫描仪输出的图形结果可直接导入UG使用,直接对测绘件进行逆向设计,有效减少测绘过程中的校对时间,提高设计准确性。
若使用三维激光扫描仪,会大大提高测绘效率;实现复杂零部件进行高效、精确的数字化建模,提高公司在产品零部件研究方面的能力;为公司在煤机装备领域的研究提升有力支撑。
3D扫描仪原理及用途 内容来源网络,由SIMM深圳机械展整理 更多3D扫描及测量设备展览,就在深圳机械展! 这是一个无所不能的时代,一些你认为只会在科幻中出现的产品其实早已存在3D扫描仪就是其中之一。借助它超强的能力,许多基础工业的日常运作都在发生着翻天覆地的变化。即使如此,它的潜力也只是得到了初步开发,未来若能和3d打印机搭配使用,一定会焕发更加强大的活力,甚至有望成为创客的必备神器之一。不过现阶段的价格问题是它绕不开的一大槽点。 所以,我们需要在购买之前摸清它的底细,看看这家伙能否物有所值,甚至成为回本神器。3D扫描仪是怎么工作的? 说到3D扫描仪,许多人的第一印象可能会觉得它是台加强版的相机,不过其实它的主业是制作3D渲染图。 3D打印机会搜集它视野内的物体信息,不过跟相机有所不同,它记录下的是物体各部分的位置信息,而不是其色彩和外观。那么3D扫描仪是如何记录下这些位置信息呢?原来是靠计算扫描仪和物体表面点阵的距离得来的。 一般来说,3D扫描仪可以分为两类:接触式和非接触式。 接触式扫描仪,顾名思义,需要与被扫描物体直接接触。相反,非接触式扫描仪则不需要直接接触,它依靠激光或辐射(如X光或超声波)来搜集被扫描物体的信息。 不过市售的3D扫描仪还是有一定的局限性,它们暂时还只能搜集物体可见表面的信息. 正因为如此,想要得到一张完整的3D渲染图,就需要扫描仪从不同角度采集多组信息,然后再将这些信息综合起来。不过随着3D扫描技术的逐步成熟,这一看似复杂的过程所耗费的时间正在不断缩短。
目前,多数的商用3D扫描仪都为非接触式 非接触式扫描仪工作时,会将激光(点、线或者阵列式)投射到物体表面,随后扫描仪就能根据物体反射光判断物体的位置信息。此外,扫描仪上还装配了一个传感器,用来搜集物体的形状信息(基于反射光的角度得出)。 显而易见,3D扫描的过程中会产生巨大的数据量,这些数据需要一个强大的软件来处理。网上这类软件琳琅满目,到底要如何选择呢?根据自己想要达到的目的选择吧。还是那句话,适合你的才是最好的。 3D扫描仪到底有什么用? 在大型基础工业中,3D扫描仪有着相当广泛的用途。举例来说,博物馆可以利用该技术来制作知名艺术品的3D渲染图以供研究,厂商则利用该技术来制造零部件。看似这些用途与我们的日常生活关系不大,但其实它在家用领域潜力十足。 最简单的应用方式就是结合3D打印机打造小比例的模型,你可以试着打印一台自己爱车的模型,或者自己给朋友做出独一无二的纪念品。对于设计师来说,你甚至可以通过它来完成 自己的设计项目。 更多展示内容就在深圳机械展
三维扫描仪因其准确性、便携性、简单性等产品特性,广泛应用在逆向设计、质量检测、小型精细扫描、三维建模、数字存档、虚拟安装、干涉分析、变形检测、VR/AR、有限元分析、形位公差分析、回弹补偿检测、管路快速检测、绘制线图等诸多解决方案之中,在航天航空、汽车船舶等交通行业、风电水电、模具检测、模具制造、警用公共安全、文化遗传、影视模型、数字化工厂等行业中发挥着不可替代的作用。 接下来我们一起来看看常规的手持3D扫描仪是如何使用的。 一、手持3D扫描设备硬件示意图: 二、3D扫描设备连接正确流程(以便确保设备物理完整性以及避免损坏任何设备。) 1、将电源插入插座; 2.将电源线连接到USB 3.0数据线; 3.将USB 3.0数据线连接到电脑的USB 3.0端口;
4.将USB 3.0数据线的另一端口连接到三维扫描仪。 5.将电源连接到扫描仪。 6.启动与设备配套的三维扫描软件 (具体软件操作界面可联系沪敖获取) 三、扫描仪自身校准 由于环境的变化可能会影响扫描仪用于分析实际物体或环境以采集其形状或外观(例如,颜色)的相关数据的设备。例如,采集的数据随后可用于构建三维数字模型。校准指一系列操作,用于在特定条件下,在测量仪或测量系统所指示的数量值或者材料测量或参考材料所表示的值与依据标准实现的相应值之间建立关系。这些变化大多是由温度差异造成的,因而需要修改机械配置。优化校准可以返回初始测量特性。 操作步骤为:在软件菜单栏找到配置|扫描仪|校准或单击主工具栏上的扫描仪校准按钮开始扫描的自身校准,该过程需要将扫描放置
由三个绿色指示条表示的十四个位置(3D 查看器)。对于前十次测量,请保持与校准板垂直的正常状态。尽量使顶部条和左侧条的红色指示条居中。对于右侧条而言,每次测量成功后,它都会上升。对于后四次测量,从测量板倾斜移动扫描仪,使之与顶部条、左侧条和右侧条的红色指示条位置相符,尽量居中于绿色矩形区域。蓝色圆圈指示条必须与用户校准板中心的绿色圆圈对齐相对于其他对象的某个对象的调整,或相对于其他对象的某些对象或一组对象的静态方向。同时蓝色圆圈的十字线必须与绿色指示条对准。完成后,应该使用“确定”按钮接受校准。 如果校准失败,需要先检查一些细节,再决定是否取消校准扫描仪: 确保用户校准板附近没有反射物。 验证定位目标点定位目标点用于通过扫描设备采集数据。 四、开始扫描 单击主工具栏的扫描按钮并按下扫描仪的扫描键,3D扫描仪即开始工作。该种系列扫描仪可采用三种模式进行扫描: 1. 基于几何信息 3D扫描仪可根据工件表面的几何信息进行自定位。 2. 基于定位目标点
操作系统调研报告 随着日常生活的数字化发展,计算机作成为了工作、学习、娱乐所不可或缺的一部分,而操作系统通过组织和管理软硬件资源,使之协调一致并高效地完成各种用户的工作,成为现代电脑必不可少的系统软件,是电脑的灵魂所在。从设计者角度看,操作系统是计算机软硬件资源的管理和控制机构,其目的是充分利用软硬件资源;从用户角度看,操作为用户提供了方便简单的使用计算机的环境。因此本次关于操作系统的调研,我们着眼于操作系统提供的各种接口,通过分析操作系统提供的各种接口,更深入的了解操作系统的组成,了解操作系统的原理,从而提高我们对计算机这一系统整体上的认识,具体的认识、深入的了解计算机的工作方式、原理。同时,对我们以后在使用计算机进行工作与学习时遇到问题快速准确的解决提供一些帮助。因为,操作系统管理了所有的计算机资源,一切的应用软件都是运行于基础之上的。 操作系统提供给用户的接口,随着操作系统的发展逐渐的发展着。最初,操作系统是没有提供图形化的接口给用户,那个时候使用计算机就是一种复杂而麻烦的事,需要使用者花费大量的时间在学习命令及其使用之上,而不是将时间专注与利用计算机以及操作系统这一工具解决其他的问题。也因此,在图形化的界面没有出现以前,计算机大都应用于专业人群之中,应用于对计算机有深入了解的用户之中。到如今,大家以及很习惯于通过图形化界面,通过鼠标来使用计算机。但,我觉得对于命令式的接口,我们还是有必要做一定的了解。同时,操作系统还有另外一种接口,即程序接口。实际上命令接口与图形接口的实现都是依赖于程序接口。顾名思义,程序接口是提供给程序用的。一下分别介绍这三种接口。 命令接口 在当前几乎所有的计算机,包括大、中型机到微型机的操作系统都向用户提供了命令接口,以实现用户与计算机之间的交互。命令接口可以理解为计算机为了与用户沟通所使用的语言,用户使用命令接口来与计算机进行交互时,首先必须在终端上键入正确的操作命令,由终端处理程序接收用户键入的命令,并将它显示在终端屏幕上。当一条命令输入完成后,操作系统的命令解释程序对用户输入的命令进行分析,然后执行相应的命令处理程序。 操作系统的命令接口都应包括一组命令、终端处理程序和命令解释程序。其中,命令解释程序的主要作用是在屏幕上给出提示符,请求用户输入命令,然后读入命令,并识别命令,再转到相应的命令处理程序去执行,并将处理结果送屏幕上显示。若用户键入的命令有错,命令解释程序未能识别,或在执行过程中出现错误,则显示出错信息。并将处理结果送屏幕上显示。 对DOS来说,命令行程序分为内部命令和外部命令,内部命令是随https://www.doczj.com/doc/5c2156915.html,装入内存的,而外部命令是一条一条单独的可执行文件。内部命令都集中在根目录下的https://www.doczj.com/doc/5c2156915.html,文件里,电脑每次启动时都会将这个文件读入内存,也就是说在电脑运行时,这些内部命令都驻留在内存中,用dir命令是看不到这些内部命令的。外部命令都是以一个个独立的文件存放在磁盘上的,它们都是以com和exe为后缀的文件,例如我们常用的一些可执行文件,它们并不常驻内存,只有在电脑需要时,才会被调入内存。 大家比较熟悉的命令解释程序有MS-DOS/windows 98的https://www.doczj.com/doc/5c2156915.html,,windows 2000/xp/vista/7的cmd.exe以及UNIX/Linux的shell程序。
和其他别的产品一样,三维扫描仪的种类也是非常丰富的,不同种类的三维扫描仪工作原理有差别,应用的范围也不同。 下面我们就先从三维扫描仪的种类出发,来看看这个大家族里的非接触式的手持式三维扫描仪的原理是怎样的。 对于三维扫描仪来说,大体分为两种:接触式三维扫描仪和非接触式三维扫描仪。其中非接触式三维扫描仪又分为光栅三维扫描仪(也称拍照式三维描仪)和激光扫描仪。而光栅三维扫描又有白光扫描或蓝光扫描等,激光扫描仪又有点激光、线激光、面激光的区别。 三维扫描仪通过扫描收集到的这些模型数据具有相当广泛的用途,工业设计、瑕疵检测、逆向工程、机器人导引、地貌测量、医学信息、生物信息、刑事鉴定、数字文物典藏、电影制片、游戏创作素材等等都可见其应用。
接下来我们就言归正传一起来看看非接触式里的手持式三维扫 描仪它的作用和原理。根据光源的不同手持三维扫描仪又可手持式白光扫描仪、手持式激光扫描仪、手持红外光扫描仪,以下分别介绍一下。 手持式激光三维扫描仪用来侦测并分析现实世界中物体或环境 的形状(几何构造)与外观数据(如颜色、表面反照率等性质)。搜集到的数据常被用来进行三维重建计算,在虚拟世界中创建实际物体的数字模型。其原理是基于拍照式三维扫描仪原有基础上设计的产品,扫描创建物体表面的点云图,这些点可用来插补成物体的表面形状,点云越密集创建的模型更精准,可进行三维重建。若扫描仪能够取得表面颜色,则可进一步在重建的表面上粘贴材质贴图,亦即所谓的材质印射(texture mapping)。手持式激光三维扫描仪是分析和报告几何尺寸与公差(GD&T)的一种完美检测设备。直接生成的stl文件,易于导入检测软件加以快速编辑和后续处理。
三维激光扫描仪分类及原 理 Prepared on 24 November 2020
三维激光扫描仪分类及原理 地面三维激光扫描技术的出现是以三维激光扫描仪的诞生为代表,有人称“三维激光扫描系统”是继GPS (Global Position System)技术以来测绘领域的又一次技术革命。三维激光扫描技术是一种先进的全自动高精度立体扫描技术,又称为“实景复制技术”,是继GPS空间定位技术后的又一项测绘技术革新,将使测绘数据的获取方法、服务能力与水平、数据处理方法等进入新的发展阶段。传统的大地测量方法,如三角测量方法,GPS测量都是基于点的测量,而三维激光扫描是基于面的数据采集方式。三维激光扫描获得的原始数据为点云数据。点云数据是大量扫描离散点的结合。三维激光扫描的主要特点是实时性、主动性、适应性好。三维激光扫描数据经过简单的处理就可以直接使用,无需复杂的费时费力的数据后处理;且无需和被测物体接触,可以在很多复杂环境下应用;并且可以和GPS等集合起来实现更强、更多的应用。三维激光扫描技术作为目前发展迅猛的新技术,必定会在诸多领域得到更深入和广泛的应用。 对空间信息进行可视化表达,即进行三维建模,通常有两类方法:基于图像的方法和基于几何的方法。基于图像的方法是通过照片或图片来建立模型,其数据来源是数码相机。而基于几何的方法是利用三维激光扫描仪获取深度数据来建立三维模型,这种方法含有被测场景比较精确的几何信息。 三维激光扫描仪的分类: 三维激光扫描仪按照扫描平台的不同可以分为:机载(或星载)激光扫描系统、地面型激光扫描系统、便携式激光扫描系统。
三维激光扫描仪作为现今时效性最强的三维数据获取工具可以划分为不同的类型。通常情况下按照三维激光扫描仪的有效扫描距离进行分类,可分为:(1)短距离激光扫描仪:其最长扫描距离不超过3m,一般最佳扫描距离为0. 6~1. 2 m,通常这类扫描仪适合用于小型模具的量测,不仅扫描速度快且精度较高,可以多达三十万个点精度至±0.018 mm。例如:美能达公司出品的VIVID 910高精度三维激光扫描仪,手持式三维数据扫描仪FastScan等等,都属于这类扫描仪。 (2)中距离激光扫描仪:最长扫描距离小于30 m的三维激光扫描仪属于中距离三维激光扫描仪,其多用于大型模具或室内空间的测量。 (3)长距离激光扫描仪:扫描距离大于30m的三维激光扫描仪属于长距离三维激光扫描仪,其主要应用于建筑物、矿山、大坝、大型土木工程等的测量。例如:奥地利Riegl公司出品的LMS Z420i三维激光扫描仪和加拿大Cyra 技术有限责任公司出品的Cyrax 2500激光扫描仪等,属于这类扫描仪。 (4)航空激光扫描仪:最长扫描距离通常大于1公里,并且需要配备精确的导航定位系统,其可用于大范围地形的扫描测量。 之所以这样进行分类,是因为激光测量的有效距离是三维激光扫描仪应用范围的重要条件,特别是针对大型地物或场景的观测,或是无法接近的地物等等,这些都必须考虑到扫描仪的实际测量距离。此外,被测物距离越远,地物观测的精度就相对较差。因此,要保证扫描数据的精度,就必须在相应类型扫描仪所规定的标准范围内使用。 三维激光扫描仪工作原理:
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920434618.7 (22)申请日 2019.04.02 (73)专利权人 宁波频泰光电科技有限公司 地址 315100 浙江省宁波市鄞州区首南街 道新兴工业园区 (72)发明人 罗剑 向贤毅 庄富强 张进 王岱 (74)专利代理机构 北京锺维联合知识产权代理 有限公司 11579 代理人 赵中璋 黄利萍 (51)Int.Cl. A61B 1/24(2006.01) A61B 1/05(2006.01) A61C 19/04(2006.01) (54)实用新型名称 一种用于手持式口内三维扫描仪的内窥部 (57)摘要 本实用新型提供一种用于手持式口内三维 扫描仪的内窥部,所述三维扫描仪还包括手持 部,所述内窥部包括与所述手持部可拆卸连接的 第一端和伸入到口腔内的第二端;所述第二端设 置有光通道口,所述光通道口中设置有反射装 置,所述内窥部的反射装置和投射光路的主光轴 形成的夹角被设置为小于或等于35°,或者大于 或等于55° 。权利要求书1页 说明书4页 附图3页CN 209996287 U 2020.01.31 C N 209996287 U
权 利 要 求 书1/1页CN 209996287 U 1.一种用于手持式口内三维扫描仪的内窥部,所述三维扫描仪还包括手持部,其特征在于,所述内窥部包括与所述手持部可拆卸连接的第一端和伸入到口腔内的第二端; 所述第二端设置有光通道口,所述光通道口中设置有反射装置,所述内窥部的反射装置和投射光路的主光轴形成的夹角被设置为小于或等于35°,或者大于或等于55°。 2.根据权利要求1所述的内窥部,其特征在于,所述夹角被设置为10°到35°,或者,55°到80°。 3.根据权利要求2所述的内窥部,其特征在于,所述夹角被设置为35°,或者55°。 4.根据权利要求1-3任一项所述的内窥部,其特征在于,所述反射装置为反射镜。 5.根据权利要求1-3任一项所述的内窥部,其特征在于,所述手持部与内窥部采用卡接或螺接的连接结构。 6.一种用于手持式口内三维扫描仪的内窥部,所述三维扫描仪还包括手持部,其特征在于,所述内窥部包括第一内窥部和第二内窥部,所述第一内窥部和所述第二内窥部均包括与所述手持部可拆卸连接的第一端和伸入到口腔内的第二端; 所述第二端设置有光通道口,所述光通道口中设置有反射装置,所述第一内窥部的反射装置和投射光路的主光轴形成的第一夹角被设置为小于或等于35°,所述第二内窥部的反射装置和投射光路的主光轴形成的第二夹角被设置为大于或等于55°。 7.根据权利要求6所述的内窥部,其特征在于,所述第一夹角被设置为10°到35°,所述第二夹角被设置为55°到80°。 8.根据权利要求7所述的内窥部,其特征在于,所述第一夹角被设置为35°,所述第二夹角被设置为55°。 9.根据权利要求6-8任一项所述的内窥部,其特征在于,所述反射装置为反射镜。 10.根据权利要求6-8任一项所述的内窥部,其特征在于,所述手持部与内窥部采用卡接或螺接的连接结构。 2
操作系统实验报告 ——生产者和消费者问题 姓名:学号:班级: 一、实验内容 1、模拟操作系统中进程同步和互斥; 2、实现生产者和消费者问题的算法实现; 二、实验目的 1、熟悉临界资源、信号量及PV操作的定义与物理意义; 2、了解进程通信的方法; 3、掌握进程互斥与进程同步的相关知识; 4、掌握用信号量机制解决进程之间的同步与互斥问题; 5、实现生产者-消费者问题,深刻理解进程同步问题; 三、实验题目 在Windows操作系统下用C语言实现经典同步问题:生产者—消费者,具体要求如下: (1)一个大小为10的缓冲区,初始状态为空。 (2)2个生产者,随机等待一段时间,往缓冲区中添加数据,若 缓冲区已满,等待消费者取走数据之后再添加,重复10次。 (3)2个消费者,随机等待一段时间,从缓冲区中读取数据,若 缓冲区为空,等待生产者添加数据之后再读取,重复10次。 四、思想 本实验的主要目的是模拟操作系统中进程同步和互斥。在系统进程并发执行异步推进的过程中,由于资源共享和进程间合作而造成进程间相互制约。进程间的相互制约有两种不同的方式。 (1)间接制约。这是由于多个进程共享同一资源(如CPU、共享
输入/输出设备)而引起的,即共享资源的多个进程因系统协调使用资源而相互制约。 (2)直接制约。只是由于进程合作中各个进程为完成同一任务而造成的,即并发进程各自的执行结果互为对方的执行条件,从而限制各个进程的执行速度。 生产者和消费者是经典的进程同步问题,在这个问题中,生产者不断的向缓冲区中写入数据,而消费者则从缓冲区中读取数据。生产者进程和消费者对缓冲区的操作是互斥,即当前只能有一个进程对这个缓冲区进行操作,生产者进入操作缓冲区之前,先要看缓冲区是否已满,如果缓冲区已满,则它必须等待消费者进程将数据取出才能写入数据,同样的,消费者进程从缓冲区读取数据之前,也要判断缓冲区是否为空,如果为空,则必须等待生产者进程写入数据才能读取数据。 在本实验中,进程之间要进行通信来操作同一缓冲区。一般来说,进程间的通信根据通信内容可以划分为两种:即控制信息的传送与大批量数据传送。有时,也把进程间控制在本实验中,进程之间要进行通信来操作同一缓冲区。一般来说,进程间的通信根据通信内容可以划分为两种:即控制信息的传送与大批量数据传送。有时,也把进程间控制信息的交换称为低级通信,而把进程间大批量数据的交换称为高级通信。 目前,计算机系统中用得比较普遍的高级通信机制可分为3大类:共享存储器系统、消息传递系统及管道通信系统。 ?共享存储器系统 共享存储器系统为了传送大量数据,在存储器中划出一块共享存储区,诸进程可通过对共享存储区进行读数据或写数据以实现通信。
三维激光扫描仪 2.1三维激光扫描仪研究背景 自上个世纪60年代激光技术已经开始出现,激光技术以其单一性和高聚积度在20世纪获得巨大发展。实现了从一维到二维直至今天广泛应用的三维测量的发展,实现了无合作目标的快速高精度测量。而且数字地球,数字城市等一系列概念的提出,我们可以看到:信息表达从二维到三维方向的转化,从静态到动态的过渡将是推动我国信息化建设和社会经资源环境可持续发展的重要武器。目前,各种各样的三维数据获取工具和手段不断地涌现,推动着三维空间数据获取向着实时化、集成化、数字化、动态化和智能化的方向不断地发展,三维建模和曲面重构的应用也越来越广泛[1]。传统的测绘技术主要是单点精确测量,难以满足建模中所需要的精度、数量以及速度的要求。而三维激光扫描技术采用的是现代高精度传感技术,它可以采用无接触方式,能够深入到复杂的现场环境及空间中进行扫描操作。可以直接获取各种实体或实景的三维数据,得到被测物体表面的采样点集合“点云”,具有快速、简便、准确的特点。基于点云模型的数据和距离影像数据可以快速重构出目标的三维模型,并能获得三维空间的线、面、体等各种实验数据,如测绘、计量、分析、仿真、模拟、展示、监测、虚拟现实等。 其中,地面三维激光扫描技术的研究,已经成为测绘领域中的一个新的研究热点。它采用非接触式高速激光测量的方式,能够获取复杂物体的几何图形数据和影像数据,最终由后处理数据的软件对采集的点云数据和影像数据进行处理,并转换成绝对坐标系中的空间位置坐标或模型,能以多种不同的格式输出,满足空间信息数据库的数据源和不同项目的需要。目前这项技术已经广泛应用到文物的保护、建筑物的变形监测、三维数字地球和城市的场景重建、堆积物的测定等多个方面。 2.2 三维激光扫描技术研究现状 2.2.1 主要的三维激光扫描仪介绍 随着三维激光扫描技术研究领域的不断扩大,生产扫描仪的商家也越来越多。主要的有瑞士Leica公司,美国的FARO公司和3D DIGITAL公司、奥地利的RIGEL公司、加拿大的OpTech公司、法国MENSI公司、中国的北京荣创兴业科技发展公司等。这些扫描仪在扫描距离、扫描精度、点间距和数量、光斑点的大小等指标有所不同[2]。主要的分类见图1-1和表1-1。
三维扫描仪使用方法及操作技巧 三维扫描仪大体分为接触式三维扫描仪和非接触式三维扫描仪。其中非接触式三维扫描仪又分为光栅三维扫描仪(也称拍照式三维描仪)和激光扫描仪。而光栅三维扫描又有白光扫描或蓝光扫描等,激光扫描仪又有点激光、线激光、面激光的区别。 三维扫描仪功能: 1:三维扫描仪的用途是创建物体几何表面的点云(point cloud),这些点可用来插补成物体的表面形状,越密集的点云可以创建更精确的模型(这个过程称做三维重建)。若扫描仪能够取得表面颜色,则可进一步在重建的表面上粘贴材质贴图,亦即所谓的材质映射(texture mapping)。 2:三维扫描仪可模拟为照相机,它们的视线范围都体现圆锥状,信息的搜集皆限定在一定的范围内。两者不同之处在于相机所抓取的是颜色信息,而三维扫描仪测量的是距离。手持式三维扫描仪 手持式三维扫描仪原理:线激光手持三维扫描仪,自带校准功能,采用635nm的红色线激光闪光灯,配有一部闪光灯和两个工业相机,工作时将激光线照射到物体上,两个相机来捕捉这一瞬间的三维扫描数据,由于物体表面的曲率不同,光线照射在物体上会发生反射和折射,然后这些信息会通过第三方软件转换为3D图像。在扫描仪移动的过程中,光线会不断变化,而软件会及时识别这些变化并加以处理。光线投射到扫描对象上的频率高达28,000points/s,所以在扫描过程中移动扫描仪,哪怕扫描时动作很快,也同样可以获得很好的扫描效果,手持式三维扫描仪工作时使用反光型角点标志贴,与扫描软件配合使用,支持摄影测量和自校准技术。 定位目标可以使操作员根据其需要的任何方式360移动物体。真正便携手持三维扫描仪,可装入手提箱,携带到作业现场或者工厂间转移十分方便。实现激光扫描技术的一些最高数据质量,保持较高解析度,同时在平面上保持较大三角形,从而生成较小的STL文件。设备的形状和重量分布有利于长时间使用,避免发生肌肉骨骼问题。功能多样并方便用户
移动平台操作系统与开发调研报告 1、iOS a)开发环境:MacOS + Xcode + Objective-C b)相关 iOS的系统结构分为四个层次:核心操作系统(the Core OS layer),核心 服务层(the Core Services layer),媒体层(the Media layer),Cocoa 触摸框架层(the Cocoa Touch layer)。 Xcode是苹果公司的IDE(集成开发环境)。Xcode提供了各种实用工具, 用于创建和调试源代码,编译应用程序以及调优应用程序性能。 免费的SDK还包含一个仿真器,它支持在Mac上运行大多数iPhone程序。 cocoa touch由苹果公司提供的软件开发api, 用于开发 iphone\ipod\ipad上的软件。也是苹果公司针对iPhone应用程序快速开发 提供的一个类库。此库以一系列框架库的形式存在,支持开发人员使用用 户界面元素构建图像化的事件驱动的应用程序。Cocoa Touch不支持垃圾收 集。 Cocoa是 Mac OS X 的开发环境,Cocoa Touch是 iPhone OS的开发环境。 二者都包含Objective-C运行时和两个核心框架: Cocoa包含Foundation和AppKit框架,可用于开发Mac OS X系统的应用 程序。 Cocoa Touch包含Foundation和UIKit框架,可用于开发iPhone OS系统 的应用程序。
除了操作系统之外,任何时候iPhone上都只能运行一个应用程序。随着 iPhone内存的增大、处理器的增强,这一点在未来可能会发生变化。但是 在目前,在执行代码时,你的应用程序将是唯一正在运行的程序。若你的 应用程序不是用户正在交互中的,那么它不会起作用。 受限访问,计算机上的程序可以访问启动它们的用户能够访问的任何内容, 而iPhone则严格限制了应用程序的权限。你只能在iPhone为应用程序创建 的文件系统中读写文件。此区域称为应用程序的沙盒,应用程序在其中存 储文档、首选项等需要存储的数据。 2、Android a)Android SDK + Java;Android NDK + C/C++ b)相关 Android是一种以Linux为基础的开放源码操作系统,主要使用于便携设备。 在Android中,开发者可以使用Java作为编程语言来开发应用程序,也可 以通过NDK使用C/C++作为编程语言来开发应用程序,也可使用SL4A来使 用其他各种脚本语言进行编程(如:python、lua、tcl、php等等),还有 其他诸如:Qt(qt for android)、Mono(mono for android)等一些著名 编程框架也开始支持Android编程,甚至通过MonoDroid,开发者还可以使 用C#作为编程语言来开发应用程序。另外,谷歌还在2009年特别发布了针 对初学者的Android Simple语言,该语言类似Basic语言。而在网页编程 语言方面,JavaScript,ajax,HTML5,jquery、sencha、dojo、mobl、PhoneGap 等等都已经支持Android开发。 而在Android系统底层方面,Android使用C/C++作为开发语言。 Android是一个对第三方软件完全开放的平台,开发者在为其开发程序时 拥有更大的自由度,突破了iPhone等只能添加为数不多的固定软件的枷锁; 同时与Windows Mobile、Symbian等厂商不同,Android操作系统免费向开 发人员提供,这样可节省近三成成本。 Android支持使用Java作为编程语言来开发应用程序,而Android的Java 开发方面从接口到功能,都有层出不穷的变化。考虑到Java虚拟机的效率 和资源占用,谷歌重新设计了Android的Java,以便能提高效率和减少资 源Android结构占用,因而与J2ME等不同。 早期的Android开发只支持Java作为编程语言开发应用程序,因而使得其 他语言开发者只能望而却步。2010年4月,谷歌正式对开发者发布了
手持式三维激光扫描仪 手持式三维扫描仪,是一种可以用手持扫描来获取物体表面三维数据的便携式三维扫描仪。 手持式三维扫描仪产生的技术背景 三维扫描技术是为了解决工业领域的设计和制造需求而诞生的,其主流技术从出现到现在,已经发展到了第四代。第一代是接触式测量技术,第二代是线激光扫描技术,第三代是结构光扫描技术。第三代技术与前两代相比,在效率、成本和使用方面有了明显提高,因而很快在世界范围内获得了推广。但是,时至今日,随着用户对三维扫描的效率和易用性等指标要求的进一步提高,该技术的固有缺陷已使之渐显过时,从而催生了四代三维扫描技术——手持式三维扫描。 手持式三维扫描技术,它使用线激光来获取物体表面点云,用视觉标记来确定扫描仪在工作过程中的空间位置。手持扫描具有灵活、高效、易用的优点,代表今后的发展方向。手持扫描具有最大的灵活性,但由于手的运动是随意的,因此如何精确、实时的确定任意时刻手的空间位置便成为该技术的核心问题。基于视觉标记点的空间定位技术是解决该问题的关键,目前全球范围内掌握该技术的只有两家,
一家在中国(华朗三维),另一家是国外公司。 手持式三维扫描技术优势 一般三维手持扫描仪系列使用传统的圆点标记来实现视觉定位。由于视觉定位需要的是一个“理想点”——即没有大小,因此实际使用的是圆点的圆心,圆心的坐标通过提取圆点边界来拟合。然而,由于透视投影和镜头畸变的存在,导致图像中的圆点边界即不是圆,也不是椭圆,而是一个不规则的自由形体,因此拟合圆心与真实圆心之间必定存在偏差。 与其他手持式三维扫描仪不同的是,我们舍弃了传统的圆点标记,使用一种新的不会导致偏差的视觉标记——角点标记。角点标记的角点类似黑白棋盘格的交叉点,它满足“理想点”的要求——即没有大小。在提取的时候,我们直接得到角点的坐标,而不是通过拟合来得到它,因此和真实角点之间不会存在偏差。这不仅提高了定位精度,也保证了后续摄影测量的精度和可靠性。 与圆点标记相比,角点标记的提取要复杂得多,若仅靠软件实现,则难以实现实时流畅的扫描。为此,我们将角点提取算法做入了硬件芯片,这样不仅保证了扫描的流畅性,也大大降低了对电脑配置的要求。
三位激光扫描仪调研 背景: 应用: 型号: 一、OpticScan 蓝光三维扫描仪 先临三维自主研发的OpticScan 蓝光三维扫描仪,特别适用于复杂曲面、柔性物体或易磨损的模具、样品、工件的测量和检测。 主要运用于: ●物体三维形状信息的获取,如三维测量、三维测绘、三维扫描、三维 数模档案、多媒体内容创建; ●产品的设计与研发,如CAD 设计、数字化加工、逆向工程、逆向设 计; ●三维检测,如CAV 和CAE分析 特性 | 1、精确 - 精度检测方法依据德国光学扫描仪测量检验标准VDI/VDE2634制定,单面精度最高可达7μm;
- 可生成高密度点云资料,工件表面精细部位清晰表达; - 系统具有对测量产生的噪音点进行修剪、剔除功能,确保测量精度o细节部位清晰表达 o数据完整 o精细 2、曲面信息轻松获取 - 先进非接触拍照式测量技术,轻松获取曲面信息,满足对复杂曲面、柔性物体的测量与检测要求; - 单面扫描时间小于5秒,可在瞬间获得高精度的三维数据,提高测量工作效率 3、安全、便捷 - 保护易磨损的模具、样品、文物等贵重物品不受损害; - 安全蓝光技术,不伤害人眼; - 尺寸小,可灵活移动,对大型或重型工件的也能方便的进行三维测量; 4、测量范围自由切换
- 四目系列三维扫描仪可自由切换扫描范围,且无须再次标定 5、经济性 - OpticScan蓝光三维扫描仪适用的领域广泛,无论是工业零配件还是 日常消费品,无论是文物还是首饰,都能应付自如; - 品质过硬而价格合理,让客户在投入最少化的前提下实现利益的最大 化 扫描样品举例 产品外观(点击查看大图) |a ppearance 1、 OpticScan-Q四目蓝光三维扫描仪 2、 OpticScan-D-Plus 双目蓝光 三维扫描仪 产品型号OpticScan-DL OpticScan-DM OpticScan-DS 单面扫描范围400mm×300mm(可调 节) 200mm×150mm(可调 节) 60mm×45mm(可调节)
三维扫描仪简介 随着信息和通信技术的发展,人们在生活和工作中接触到越来越多的图形图像。获取图像的方法包括使用各种摄像机、照相机、扫描仪等,利用这些手段通常只能得到物体的平面图像,即物体的二维信息。在许多领域,如机器视觉、面形检测、实物仿形、自动加工、产品质量控制、生物医学等,物体的三维信息是必不可少的。因此,如何如何迅速获取物体的三维信息并将其转化为计算机(如利用CAD 软件)能直接处理的三维数字模型就显得尤为重要。三维扫描仪正是实现这样的三维信息数字化的一种极为有效的工具。 三维立体扫描就是测量实物表面的三维坐标点集,得到的大量坐标点的集合称为点云(Point Cloud)。在中国南方,三维扫描俗称抄数,大家都管它叫抄数机。目前常用的三维扫描仪根据传感方式的不同,分为接触式和非接触式两种。 接触式测量仪采用探测头直接接触物体表面,通过探测头反馈回来的光电信号转换为数字面形信息,从而实现对物体面形的扫描和测量,主要以三坐标测量机为代表。 接触式测量具有较高的准确性和可靠性;配合测量软件,可快速准确地测量出物体的基本几何形状,如面,圆,圆柱,圆锥,圆球等。但其最大的缺点是:测量费用较高;探头易磨损。测量速度慢;检测一些内部元件有先天的限制,故欲求得物体真实外形则需要对探头半径进行补偿,因此可能会导致修正误差的问题;接触探头在测量时,接触探头的力将使探头尖端部分与被测件之间发生局部变形而影响测量值的实际读数;由于探头触发机构的惯性及时间延迟而使探头产生超越现象,趋近速度会产生动态误差。 随着计算机机器视觉这一新兴学科的兴起和发展,用非接触的光电方法对曲面的三维形貌进行快速测量已成为大趋势。这种非接触式测量不仅避免了接触测量中需要对测头半径加以补偿所带来的麻烦,而且可以实现对各类表面进行高速三维扫描。 目前,非接触式三维扫描仪很多,根据传感方法不同,常用的有基于激光扫描测量、结构光扫描测量和工业CT与核磁共振的。其中以综合性能较高结构光面扫描三维测量最为常用,也是目前市场上的主流产品。 采用非接触式三维扫描仪因其接触性,对物体表面不会有损伤,同时相比接触式的具有速度快,容易操作等特征,三维激光扫描仪可以达到5000-10000点/秒的速度,而光栅面扫描三维扫描仪则采用面结构光,一次可投影上百条条纹,速度更是达到几秒钟百万个测量点,应用于实时扫描,工业检测等时具有很大的优势。
系统调研报告范文(精选多篇) 计量系统调研报告 6月14日-6月17日,我们创新小组一行8人去了总部在河南郑州的河南煤业化工集团和几家在郑州的软件公司进行了实地调研,现将结果汇报如下:在4天的调研过程中,我们首先去了河南煤业化工集团公司的销售总公司,集团公司信息化部的杨部长向我们介绍了河南煤化集团的信息化情况,并对他们销售公司的计量过磅系统进行了详细的介绍,同时我们了解到他们集团公司也正在对信息化系统进行改造,以提高对各分公司的管理效率。接下来我们先后去了郑州博乐信息技术有限公司、郑州金达监控技术有限公司、郑州金恒电子技术有限公司,实地去了各个软件公司的办公地点,了解了各公司的一些基本情况,听取了各软件公司关于计量监控软件的产品说明,并针对我们关心的重点问题与各公司技术人员进行了深入的交流和探讨。最后我们去了今迈科技发展有限公司,该公司负责生产和销售装载机称重系统,即铲车秤,安装后可以对铲车装车的煤量进行精确计量。 通过这4天对上述公司的实地考察,我们了解到,河南煤化集团的销售系统与现在我们使用的系统差不多,没有实现完全的自动化。我们考察的各个软件公司整体上来说,公司规模比较小,实力一般,人员也不多,同时对火车磅的无人值守过磅系统参与的较少,基本上都没有做过这方面的业务,对地中衡的无人过磅系统做的比较多。通过与各软件公司的交流,我们得到以下可以应用到我们以后的系统中的各项功能。 1、日志跟踪查询功能。 2、拍照查询系统。 3、皮重变化曲线功能。 4、开关机记录功能。 5、指纹识别功能。 6、黑匣子功能。 7、红外线报警提示系统。 8、磅单打印类excel格式,使用者可以任意设置。 9、 b/s结构的查询功能。 操作系统调研报告 随着日常生活的数字化发展,计算机作成为了工作、学习、娱乐所不可或缺的一部分,而操作系统通过组织和管理软硬件资源,使之协调一致并高效地完成各种用户的工作,成为现代电脑必不可少的系统软件,是电脑的灵魂所在。从
目前市面上的三维扫描仪(3D scanner)可谓是五花八门,各种款式多到足以让人眼花缭乱,在部分地区又被称为激光抄数机或者3D抄数机。其实3D建模扫描仪基本可分为两大类,手持式和拍照式。那么这两种基本的三维扫描仪又有什么样的区别呢? 市场上三维扫描仪产品款式齐全,下面针对两种基本款式做了以下几点简单的概述。 手持式三维扫描仪原理:线激光手持三维扫描仪,自带校准功能,配有一部激光发射器和两个工业相机,工作时将激光线照射到物体上,两个相机来捕捉这一瞬间的三维扫描数据,由于物体表面的曲率不同,光线照射在物体上会发生反射和折射,然后这些信息会通过第三方软件转换为3D图像。在三维3D扫描仪移动的过程中,光线会不断变化,而软件会及时识别这些变化并加以处理。光线投射到扫描对象上的频率可高达数百万点每秒,所以在三维扫描过程中移动三维扫描仪,哪怕扫描时动作很快,也同样可以获得很好的扫描效果,手持式三维
扫描仪工作时使用反光型标记点贴,与三维扫描软件配合使用,支持摄影测量和自校准技术。 定位目标可以使操作员根据其需要的任何方式360°移动物体。真正便携,手持三维扫描仪可装入手提箱,携带到作业现场或者工厂,使用十分方便。 手持三维扫描仪可实现激光扫描技术的一些高数据质量,保持较高解析度,同时在平面上保持较大三角形,从而生成较小的STL文件。功能多样并方便用户使用,由于其尺寸小巧,所以可以在狭小空间内扫描几乎任何尺寸、形状或颜色的物体。 拍照式三维扫描仪扫描原理类似于照相机拍摄照片而得名,是为满足工业设计行业应用需求而研发的产品,,它集高速扫描与高精度优势,可按需求自由调整测量范围,从小型零件扫描到车身整体测量均能完美胜任,具备极高的性能价格比。目前已广泛应用于工业设计行业中。 拍照式结构光三维扫描仪是一种高速高精度的三维扫描测量设备,采用的是结构光非接触照相测量原理。结构光三维扫描仪的基本
东北大学秦皇岛分校 计算机与通信工程学院 操作系统课程设计 设计题目FCFS调度算法模拟和进程管理器 专业名称计算机科学与技术 班级学号2133319 学生姓名 指导教师马海涛 设计时间2016.01.11—2016.01.20
课程设计任务书 专业:计算机科学与技术学号:2133319 学生姓名(签名): 设计题目:FCFS调度算法模拟及进程管理器 一、设计实验条件 808实验室 二、设计任务及要求 1.FCFS调度算法的模拟实现; 要求:提供10个模拟作业,在屏幕上打印所提供的作业信息,输入进程名作业被放入就绪队列,程序根据FCFS调度算法,对就绪队列中的进程进行调度执行,每个模拟进程执行时打印自身的进程名、到达时间等信息,最后要打印出所调度作业的平均周转时间和平均带权周转时间 2.进程管理器; 要求:实现一个系统进程管理器,能够显示当前系统的活动进程信息(进程名、用户、优先级、内存使用等),并能结束或创建特定进程。 三、前言 融会贯通计算机操作系统课程的内容,通过知识的综合运用,加深对计算机 操作系统工作原理及相互联系的认识; 掌握进程调度的实现以及原理 培养使用代码模拟操作系统功能的能力,同时加深对操作系统的认识 四、设计主体 1.FCFS调度算法的模拟实现(该部分由组员自己独立完成) 1)设计内容 建立数据结构,提供10个模拟作业,在屏幕上打印所提供的作业信息, 输入进程名作业被放入就绪队列,程序根据FCFS调度算法,对就绪队列 中的进程进行调度执行,每个模拟进程执行时打印自身的进程名、到达时 间等信息,最后要打印出所调度作业的平均周转时间和平均带权周转时 间。和其他调度算法相比较,分析该调度算法的优缺点。
三维扫描仪发展以及种类 三维扫描仪产生于上个世纪七八十年代。到现在已经有几十年的历史,其产品的种类也越来越丰富。 按照出现的时间以及工作性能原理,三维扫描仪可以分为三类 1 激光点式扫描仪。 基本特征,光源为激光,在扫描时看到一个红色的点在物体表面,只能逐点摄取三维数据,有点拼接面,由面拼接至立体。这类三维扫描仪出现的时间最早,是三维扫描仪从无到有的飞跃。其代表产品,罗兰。然而以今天的眼光来看,其速度精确度和当今主流的三维扫扫描仪相去甚远。 2 激光线三维扫描仪。 基本特征,光源为激光,扫描点数,每秒在10万点左右。在扫描时看到一条红色的线或者十字架在物体表面,每次摄取这条线上的三维数据,拼接成面进一步至立体。其代表产品为柯尼卡美能达,handyscan。这类产品以其便携,轻巧受用户欢迎。然而,由于激光线扫描原理所决定的,要扫描一个物体必须由线到面由面到立体经过数万次拼接,其精度的损失是难以密度。因此,就精度这个指标来说没同第三代扫描仪是不可相提并论的。 3 白光光栅三维扫描仪 基本特征,白光为光源,对人体完全无害,每秒最低80万点,最高可达800万点。在扫描时,扫描头内部的光栅机发出光栅,投影到物体表面。每次扫描都是一个面,由面拼接成立体,扫描一个物体需要几次,最多200次拼接(扫描整车)。此类产品以其高精度以及大工作量受到用户的欢迎。但是其便携性不如手持式激光扫描仪。 另外,关于三维扫描仪的精确度,至今国内尚无标准。国际上认知度最高的一个标准是德国的VDI2634标准。不同类型的扫描仪不在同一标准下制定的精确度是无法直接对比的。然而主流白光三维扫描仪都是按照德国VDI2634标准来确定精度的,不同品牌的扫描仪也可以进行比较。
Android系统调研报告 摘要:Android手机操作系统自Google公司推出以来,经过两年的发展,已经成长为仅次于Aymbian的巨头,成为众多移动终端生产商和应用程序开发者青睐的选择。这次调研分析了Android系统的特点,介绍了Android系统构架、市场占有率、各版本的更新,以及对硬件的要求。简单分析了Android能取得成功的原因,以及Android的发展面临的困难和问题。 关键字:Android、智能手机系统、Android系统构架、Android版本、Android 发展问题 一、Android简介 Android 是Google历经数年和投资数亿美元开发出来的智能手机系统,是基于Linux内核的操作系统,是Google公司在2007年11月5日公布的手机操作系统。Google也发起了围绕Android的组织——开放手机联盟,其英文全称为“Open Handset Alliance”。它采用了软件堆层(software stack,又名以软件叠层)的架构,主要分为三部分。底层Linux内核只提供基本功能;其他的应用软件则由各公司自行开发,部分程序以Java编写。 随着各大移动终端生产商大力开发和生产基于Android的移动智能设备,Android迅速得到业界和社会的认可,并成为整个产业的热点,基于Android平台的各类人才逐渐成为各大企业竞相争夺的焦点。而且Android是一个开放的系统,不管是企业还是个人都可以参与来表达自己的创意和想法。
二、Android发展历程
三、Android特点 Android手机操作系统的推出,大大受到广大编程人员的喜爱。那么它究竟有什么出色的特点吸引着人们的眼光呢这里总结了一些Android特点,以供对此有兴趣的朋友参考学习。 1. Android是什么 Android是一个平台,主要包括Linux微内核,中间件(SQLite等),关键应用(电话本、邮件、短消息、GoogleMap、浏览器等),提供的Java框架,以及Android中的JVM。 特点之关键类 视图,ContentProviders(应用交互管理类)、ResourceManager非编码资源管理类、NotificationManager(通告管理类)、ActivityManager(生命周期管理类)。 特点之界面开发